
Abstract
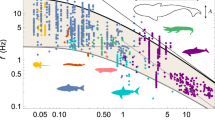
Inertial aquatic swimmers that use undulatory gaits range in length L from a few millimetres to 30 metres, across a wide array of biological taxa. Using elementary hydrodynamic arguments, we uncover a unifying mechanistic principle characterizing their locomotion by deriving a scaling relation that links swimming speed U to body kinematics (tail beat amplitude A and frequency ω) and fluid properties (kinematic viscosity ν). This principle can be simply couched as the power law Re ∼ Swα, where Re = UL/ν ≫ 1 and Sw = ω AL/ν, with α = 4/3 for laminar flows, and α = 1 for turbulent flows. Existing data from over 1,000 measurements on fish, amphibians, larvae, reptiles, mammals and birds, as well as direct numerical simulations are consistent with our scaling. We interpret our results as the consequence of the convergence of aquatic gaits to the performance limits imposed by hydrodynamics.
This is a preview of subscription content, access via your institution
Access options
Subscribe to this journal
Receive 12 print issues and online access
$259.00 per year
only $21.58 per issue
Buy this article
- Purchase on SpringerLink
- Instant access to full article PDF
Prices may be subject to local taxes which are calculated during checkout



Similar content being viewed by others

References
Pedley, T. J. Scale Effects in Animal Locomotion (Cambridge Univ. Press, 1977).
Vogel, S. Life in Moving Fluids: The Physical Biology of Flow (Princeton Univ. Press, 1996).
Fish, F. E. & Lauder, G. V. Passive and active flow control by swimming fishes and mammals. Annu. Rev. Fluid Mech. 38, 193–224 (2006).
Childress, S. Mechanics of Swimming and Flying (Cambridge Univ. Press, 1981).
Hertel, H. Structure, Form, Movement (Reinhold, 1966).
Triantafyllou, M. S., Triantafyllou, G. S. & Yue, D. K. P. Hydrodynamics of fishlike swimming. Annu. Rev. Fluid Mech. 32, 33–53 (2000).
Wu, T. Y. Fish swimming and bird/insect flight. Annu. Rev. Fluid Mech. 43, 25–58 (2011).
Bainbridge, R. The speed of swimming of fish as related to size and to the frequency and amplitude of the tail beat. J. Exp. Biol. 35, 109–133 (1958).
Webb, P. W., Kostecki, P. T. & Stevens, E. D. The effect of size and swimming speed on locomotor kinematics of rainbow trout. J. Exp. Biol. 109, 77–95 (1984).
Videler, J. J. & Wardle, C. S. Fish swimming stride by stride: speed limits and endurance. Rev. Fish Biol. Fisheries 1, 23–40 (1991).
Mchenry, M., Pell, C. & Long, J. H. Jr Mechanical control of swimming speed: Stiffness and axial wave form in undulating fish models. J. Exp. Biol. 198, 2293–305 (1995).
Long, J. H. Jr Muscles, elastic energy, and the dynamics of body stiffness in swimming eels. Am. Zool. 38, 771–792 (1998).
Taylor, G. I. Analysis of the swimming of long and narrow animals. Proc. R. Soc. Lond. A 214, 158–183 (1952).
Lighthill, M. J. Large-amplitude elongated-body theory of fish locomotion. Proc. R. Soc. Lond. B 179, 125–138 (1971).
Hess, F. & Videler, J. J. Fast continuous swimming of saithe (Pollachius virens): A dynamic analysis of bending moments and muscle power. J. Exp. Biol. 109, 229–251 (1984).
Cheng, J. Y., Pedley, T. J. & Altringham, J. D. A continuous dynamic beam model for swimming fish. Phil. Trans. R. Soc. Lond. B 353, 981–997 (1998).
McMillen, T., Williams, T. & Holmes, P. Nonlinear muscles, passive viscoelasticity and body taper conspire to create neuromechanical phase lags in anguilliform swimmers. PLoS Comput. Biol. 4, e1000157 (2008).
Alben, S., Witt, C., Baker, T. V., Anderson, E. & Lauder, G. V. Dynamics of freely swimming flexible foils. Phys. Fluids 24, 051901 (2012).
Kern, S. & Koumoutsakos, P. Simulations of optimized anguilliform swimming. J. Exp. Biol. 209, 4841–4857 (2006).
Gazzola, M., van Rees, W. M. & Koumoutsakos, P. C-start: Optimal start of larval fish. J. Fluid Mech. 698, 5–18 (2012).
Tytell, E. D., Hsu, C. Y., Williams, T. L., Cohen, A. H. & Fauci, L. J. Interactions between internal forces, body stiffness, and fluid environment in a neuromechanical model of lamprey swimming. Proc. Natl Acad. Sci. USA 107, 19832–19837 (2010).
Tytell, E. D. et al. Disentangling the functional roles of morphology and motion in the swimming of fish. Integr. Comp. Biol. 50, 1140–1154 (2010).
Bhalla, A. P. S., Griffith, B. E. & Patankar, N. A. A forced damped oscillation framework for undulatory swimming provides new insights into how propulsion arises in active and passive swimming. PLoS Comput. Biol. 9, e1003097 (2013).
van Rees, W. M., Gazzola, M. & Koumoutsakos, P. Optimal shapes for anguilliform swimmers at intermediate Reynolds numbers. J. Fluid Mech. 722, R3 (2013).
Batchelor, G. K. An Introduction to Fluid Dynamics (Cambridge Univ. Press, 1967).
Landau, L. D. & Lifshitz, E. M. Fluid Mechanics (Pergamon Press, 1959).
Horner, A. M. & Jayne, B. C. The effects of viscosity on the axial motor pattern and kinematics of the African lungfish (Protopterus annectens) during lateral undulatory swimming. J. Exp. Biol. 211, 1612–1622 (2008).
Gazzola, M., Chatelain, P., van Rees, W. M. & Koumoutsakos, P. Simulations of single and multiple swimmers with non-divergence free deforming geometries. J. Comput. Phys. 230, 7093–7114 (2011).
Gazzola, M., Hejazialhosseini, B. & Koumoutsakos, P. Reinforcement learning and wavelet adapted vortex methods for simulations of self-propelled swimmers. SIAM J. Sci. Comput. 36, B622–B639 (2014).
Taylor, G. K., Nudds, R. L. & Thomas, A. L. R. Flying and swimming animals cruise at a Strouhal number tuned for high power efficiency. Nature 425, 707–711 (2003).
Acknowledgements
We thank the Swiss National Science Foundation, and the MacArthur Foundation for partial financial support. We also thank W. van Rees, B. Hejazialhosseini and P. Koumoutsakos of the CSElab at ETH Zurich for their help with the computational aspects of the study, and Margherita Gazzola for her sketches.
Author information
Authors and Affiliations
Contributions
M.G., M.A. and L.M. conceived the study, developed the theory, collected and analysed the experimental data and wrote the paper. M.G. performed the 2D numerical simulations.
Corresponding authors
Ethics declarations
Competing interests
The authors declare no competing financial interests.
Supplementary information
Supplementary Information
Supplementary Information (PDF 4117 kb)
Rights and permissions
About this article

Cite this article
Gazzola, M., Argentina, M. & Mahadevan, L. Scaling macroscopic aquatic locomotion. Nature Phys 10, 758–761 (2014). https://doi.org/10.1038/nphys3078
Received:
Accepted:
Published:
Issue date:
DOI: https://doi.org/10.1038/nphys3078
This article is cited by
-
Scaling the tail beat frequency and swimming speed in underwater undulatory swimming
Nature Communications (2023)
-
Flow over a hydrofoil subjected to traveling wave-based surface undulation: effect of phase difference between surface waves and wave number
Theoretical and Computational Fluid Dynamics (2023)
-
Scaling laws for the intermittent swimming performance of a flexible plate at low Reynolds number
Journal of Hydrodynamics (2023)
-
The influence of trailing edge shape on the wake circulation and time-averaged wake of bio-inspired pitching panels
Experiments in Fluids (2023)
-
Vortex interactions of two burst-and-coast swimmers in a side-by-side arrangement
Theoretical and Computational Fluid Dynamics (2023)
