
Abstract
This study presents a strategy for an intelligent vehicle trajectory tracking system that employs an adaptive robust non-singular fast terminal sliding mode control (ARNFTSMC) approach to address the challenges of uncertain nonlinear dynamics. Initially, a path tracking error system based on mapping error is established, along with a speed tracking error system. Subsequently, a novel ARNFTSMC strategy is introduced to tackle the uncertainties and external perturbations encountered during actual vehicle operation. The adaptive laws established for the longitudinal demand force and the front-wheel steering angle do not require prior understanding of the upper limit of the lumped uncertainty, while successfully avoiding singularities and eliminating chattering. By applying Lyapunov’s stability theorem, it is shown that the control system for trajectory tracking can reach the equilibrium point within a finite time. Following this, a torque optimization distribution control strategy is developed. Ultimately, numerical simulations are used to validate both the effectiveness of the proposed approach and its robustness across different conditions.
Similar content being viewed by others


Introduction
Autonomous electric vehicles equipped with four-wheel independent drive (4WID) are regarded as effective tools for enhancing traffic safety and transportation efficiency1,2 due to their independently controllable four wheels, which can generate a flexible and precise torque response rapidly3. The incorporation of lateral and longitudinal trajectory tracking control is essential to guarantee compliance with safety and efficiency standards4. It is essential to converge the control objectives—namely, lateral error, orientation error, and speed error—to zero through the regulation of both the steering and driving systems, thereby ensuring that the intelligent vehicle smoothly and accurately follows the predetermined trajectory. Designing a suitable controller for trajectory tracking in intelligent vehicles, however, poses considerable challenges. This complexity arises from the intricate interactions of vehicle dynamics that are strongly coupled, highly nonlinear, and uncertain, along with external disturbances that vary over time and are hard to measure or estimate when the vehicle is in motion. When investigating trajectory tracking control for 4WID electric vehicles, it is crucial to consider the robustness of the control system to model uncertainties and disturbances, as well as practical limitations imposed by actuators and road conditions. Stanford University5 developed a controller that utilizes both lateral displacement error and orientation error. An adjustable parameter optimization scheme based on fuzzy uncertainty and the use of fuzzy6 sets to define uncertainty limits is introduced. The Takagi–Sugeno (T-S) approach7,8, when paired with dynamic output feedback control for steering vehicles using the principles of fuzzy observation, has proven to be effective. A PID controller utilizing double integrals and focusing on lateral offsets was created to mitigate curvature disturbances over time9. In the linear quadratic regulator (LQR) path tracking controller, an adaptive backlash compensator was implemented to address the backlash nonlinearity of the steering actuation system10. The orientation error was redefined in the presence of vehicle side-slip, leading to the creation of a path-following controller that incorporates backstepping methods along with LQR11 techniques. Techniques of Model Predictive Control (MPC)12 were utilized to tackle the challenge of constrained path tracking. An MPC13 method based on differential evolution was proposed, incorporating a measurable pendulum yaw rate angle as a perturbation; another investigation14 focused on creating an efficient lateral path tracking controller using MPC that accounts for path preview and incorporates an adaptive tire parameter module to update the MPC prediction model in real-time. Rosenfelder et al.15 proposed a control method that integrates MPC theory with sub-Riemannian geometry to achieve precise control in scenarios such as parking. Tran et al.16 proposed an MPC scheme for trajectory tracking of 4WID vehicles without the need for a terminal region or controller.
Nonlinear dynamic systems are frequently subjected to uncertainties and external disturbances. Several studies17,18 have utilized the Fourier series approximation to estimate uncertainty in complex control systems and to resolve unmodeled disturbances. Researchers have designed extended state observers to improve the robustness of control systems, especially in the control of complex dynamic systems, showing significant advantages19,20. Sliding mode control presents a range of beneficial characteristics, such as outstanding transient response, resilience to changes in parameters, and a lack of sensitivity to disturbances. The basic idea revolves around the consistent ability to control and maintain the trajectory of a system in the state space of a given sliding surface. In the linear sliding mode control (LSMC)3,21,22,23,24, the surface for sliding mode is structured linearly, guaranteeing that the system’s state asymptotically approaches the equilibrium point within a finite time25. To ensure that the system state reaches convergence in finite time, fast terminal sliding mode control (FTSMC)26 and nonlinear sliding surface-based terminal sliding mode control (TSMC)27,28,29 were presented, which are widely used in vehicle dynamics control30,31,32,33,34. However, these regulatory approaches frequently face challenges related to singularities arising from the presence of negative exponential powers, potentially resulting in uncontrolled inputs. To address this challenge, alternative TSMC approaches that have gained popularity include the non-singular terminal sliding mode (NTSMC)35,36,37,38 and the non-singular fast terminal sliding mode (NFTSMC)39,40.
Although the previously mentioned control techniques have shown efficacy in trajectory tracking control systems, some limitations continue to exist. The main contributions of this paper are as follows:
-
(1)
In contrast to the existing LSMC and TSMC methods, which are unable to circumvent the singularity problem3,21,22,23,24,30,31,32,33,34, the new adaptive control law effectively eliminates this issue. It enhances the responsiveness of the system by adjusting its state to reach the preferred equilibrium position more quickly.
-
(2)
Existing trajectory tracking control strategies are often limited in their ability to cope with uncertainty and disturbances because they usually require prior knowledge of an upper bound on the uncertainty3,8,21,23,29,31,32,33,34,35,36,37,40,41. This study introduces a control algorithm for adaptive parameter updates designed to address the difficulties arising from unspecified upper limits in practical vehicle trajectory tracking scenarios, while also preventing oscillations and singularities during the control process.
-
(3)
Unlike methods that focus only on lateral path tracking2,3,4,6,7,8,10,11,13,14,22,31,37,41,42. In this study, the interactions between lateral and longitudinal motions are considered, and both lateral path tracking controllers and longitudinal speed tracking controllers are designed.
The structure of the paper is summarized as follows: Sect. 2 introduces the vehicle related model. Section 3 presents the upper path tracking controller and the longitudinal speed tracking controller, as well as the lower torque distribution optimization. Section 4 presents the numerical simulation results and discussion and Sect. 5 concludes.
Model and problem formulation
7DOF vehicle dynamics model
Figure 1 depicts a model of a 4WID vehicle that illustrates the vehicle dynamics. The model is characterized as a 7-degree-of-freedom (7DOF) system with lateral motion, longitudinal motion and wheel rotation. The primary assumptions underlying this model are as follows: (a) the effects of roll motion, pitch motion, and suspension on the vehicle are neglected41; (b) aerodynamic forces are disregarded; and (c) treat the front steering angle as a direct input. Establish the following equations for vehicle dynamics:
Where m represents the vehicle mass, \(a_{x}\) and \(a_{y}\) denote the vehicle’s longitudinal and lateral accelerations, respectively. \(\psi\) signifies the yaw angel, and \(I_{z}\) indicates the vehicle’s yaw moment of inertia. The variables \(F_{Xfl}\), \(F_{Xfr}\), \(F_{Xrl}\) and \(F_{Xrr}\) correspond to the front and rear longitudinal tire forces, whereas \(F_{Yfl}\), \(F_{Yfr}\), \(F_{Yrl}\) and \(F_{Yrr}\) represent the front and rear lateral tire forces. \(B\) refers to the vehicle’s track width and both \(a\) and \(b\) indicate the longitudinal distances from the vehicle’s center of mass to the front and rear axles. \(\delta_{f}\) represents the front wheel steering angle.

7DOF vehicle dynamics model.
The wheel rotational dynamics is expressed as
where \(J_{\omega ij}\) represents the moment of inertia of the wheels, \(T_{dij}\) and \(T_{bij}\) signify the driving torque and braking torque, \(R_{e}\) indicates the rolling radius of the tire, \(\omega_{ij}\) denotes the angular speed of the wheels. Each wheel of the 4WIDEV system is independently driven by its own motor. In practice, by collecting the signals from the motor controllers, one can obtain information regarding speed and torque. This data can then be utilized in conjunction with formula (2) to calculate the tire longitudinal force, denoted as \(F_{Xij}\).
Tire model and motor model
Tire model
The complex nonlinear characteristics of tires significantly influence vehicle dynamics control. This paper employs the ‘Magic Formula’43 to characterize the mechanical properties of tires.
where \(x\) denotes the side slip angle or longitudinal slip ratio, \(y\) represents the longitudinal or lateral tire force. The tire lateral force \(F_{Yij}\) is obtained when \(x\) denotes the tire lateral deflection angle \(\alpha\). \(B\), \(C\), \(D\), and \(E\) are tire intrinsic factors that can be obtained by Carsim and Matlab fitting.
Motor model
The torque response features of in-wheel motors can be described using a second-order transfer function:
where \(T_{m}\) and \(T_{e}\) denotes the actual and theoretical output torque of the motor, respectively. The parameter \(\xi\) signifies the performance of the motor, while \(s\) represents the Laplace operator.
Trajectory tracking error model
The trajectory tracking error model is depicted in Fig. 2, with \(x_{o} o_{o} y_{o}\) being the geodetic coordinate system. Trajectory tracking encompasses heading angle tracking, lateral position tracking, and longitudinal vehicle speed tracking. \(e_{\psi }\) represents the orientation error, which is the difference between the actual heading angle \(\psi\) and the tangent direction \(\psi_{d}\) of the reference path. Notably, \(\omega_{r}\) is the yaw rate and can be expressed as \(\omega_{r} = \dot{\psi }\). \(e_{d}\) is the lateral displacement deviation between the center of mass of the vehicle and the nearest point of the reference path. The longitudinal speed error \(e_{{v_{x} }}\) is the difference between the actual longitudinal speed \(v_{x}\) and the desired speed \(v_{{x_{d} }}\).

Trajectory tracking error model.
Assumption 1
The existence of first and second order derivatives for longitudinal speed error \(e_{{v_{x} }}\), orientation error \(e_{\psi }\) and lateral offset error \(e_{d}\).
Therefore, the first order derivatives of the trajectory tracking error are as follows:
where \(\rho\) signifies the pavement curvature. \(y_{o}\) and \(y_{od}\) represent the lateral displacements of the actual path and the reference path, respectively. \(v_{y}\) denote the lateral speed. \(e_{d}\) and \(e_{\psi }\) cannot be zeroed at the same time by adjusting only the input of the front wheel angle. In this paper, two positive numbers \(\lambda_{1}\) and \(\lambda_{2}\) are used to obtain the mapping error \(e = \lambda_{1} e_{\psi } + \lambda_{2} e_{d}\) to synthesize the path tracking error, which the second-order derivative can be expressed as:
Controller design
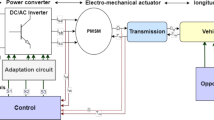
This section presents a novel ARNFTSMC strategy aimed at tackling the issues of parameter uncertainty, external disturbances, singularity, and chattering in the trajectory tracking control system for the 4WID vehicle. The relevant control framework is depicted in (Fig. 3).

Flowchart of proposed strategy.
Path tracking controller
The purpose of the study is to design the controller that ensures that the system responses \(e_{\psi }\) and \(e_{d}\) converge to zero under conditions of uncertainty and external disturbances so as to achieve accurate tracking of a predetermined trajectory. Before designing a path tracking controller that takes into account uncertainty and external disturbances, the third equation of Eq. (1) is reformulated as:
where \(f_{1}\) represents the nominal parameter of the model, denotes as \(\frac{B}{{2I_{z} }}\left( {F_{Xfr} + F_{Xrr} - F_{Xfl} - F_{Xrl} } \right) + \frac{{{\text{a}}\left( {F_{Yfl} + F_{Yfr} } \right) - b\left( {F_{Yrl} + F_{Yrr} } \right)}}{{I_{z} }}\). The term \(\Delta f_{1}\) refers to the uncertain aspects of the model parameters, while \(d_{1} \left( t \right)\) indicates the external disturbances. Furthermore, \(b_{1}\) serves as the coefficient of the system input, represented as \(\left( {F_{Xfl} + F_{Xfr} } \right)\frac{{\text{a}}}{{I_{z} }} + \left( {F_{Yfl} - F_{Yfr} } \right)\frac{B}{{2I_{z} }}\).
Inserting (7) into (6), one can have
where \(F_{1} = \lambda_{1} \left( {f_{1} - \dot{\rho }v_{x} - \rho \dot{v}_{x} } \right) + \lambda_{2} \left( {\dot{v}_{x} e_{\psi } + v_{x} \dot{e}_{\psi } + \dot{v}_{y} } \right)\), \(B_{1} = \lambda_{1} b_{1}\) and \(D_{1} \left( t \right) = \lambda_{1} \left( { \, \Delta f_{1} + d_{1} \left( t \right)} \right)\) are characterized as the lumped uncertainty. The following assumption is made about the external disturbances and uncertain parameters of the system:
Remark 1
Uncertainty \(\Delta f_{1}\) and external disturbance \(d_{1} \left( t \right)\) are unknown as shown in the following equation:
where \(\Delta_{1}\) denotes the upper bound of the lumped uncertainty44, it can showed as
where \(\theta_{0}\), \(\theta_{1}\) and \(\theta_{2}\) are all positive numbers.
Assumption 2
The uncertainty parameters \(\theta_{i} \left( {i = 0,1,2} \right)\) are continuous and differentiable, and its derivative is \(\dot{\theta }_{i} \left( {i = 0,1,2} \right) = 0\).
Initially, in order to attain finite-time convergence, enhance the speed of convergence, and alleviate the singularity issue, the sliding surface \(s_{1}\) is structured as outlined below:
where \(\tau_{1}\) and \(\tau_{2}\) are positive constants, \(1 < r_{2} < 2\) and \(r_{1} > r_{2}\). \(sign\left( \cdot \right)\) is the signum function.
The next step involves designing the equivalent control law \(\delta_{feq}\), which is derived from \(\dot{s}_{1} = 0\). The design plays a crucial role in guaranteeing that the state trajectory aligns with the sliding surface \(s_{1} = 0\). The result is obtained by temporarily ignoring the uncertainties and external disturbances in Eq. (8):
Derived for \(\dot{s}_{1} = 0\), the equivalent control law for the front wheel angle is:
To address with the problems caused by model uncertainty and external disturbances, the subsequent switching control law is proposed as follows:
where \(\varepsilon_{1} > 0\) and \(k_{1} > 0\). Let \(\hat{\theta }_{0}\), \(\hat{\theta }_{1}\), and \(\hat{\theta }_{2}\) be the estimates corresponding to \(\theta_{0}\), \(\theta_{1}\), and \(\theta_{2}\), respectively. Therefore, the total control law for the front wheel angle is:
where \(\hat{\theta }_{0}\), \(\hat{\theta }_{1}\) and \(\hat{\theta }_{2}\) are estimated gains, and their update laws can be expressed as:
where \(\Upsilon_{0}\), \(\Upsilon_{1}\) and \(\Upsilon_{2}\) are positives numbers. Define the adaptive errors as \(\tilde{\theta }_{0} = \hat{\theta }_{0} - \theta_{0}\), \(\tilde{\theta }_{1} = \hat{\theta }_{1} - \theta_{1}\) and \(\tilde{\theta }_{2} = \hat{\theta }_{2} - \theta_{2}\), while \(\tilde{\theta }_{i}\) denotes the difference between the estimated value and the actual value. Based on Assumption 2, it is possible to derive \(\dot{\tilde{\theta }}_{i} = \dot{\hat{\theta }}_{i}\).
Remark 2
In order to solve the problem of system chattering due to the presence of the discontinuous function \(sign\left( x \right)\), it is replaced by the hyperbolic function \({\text{tan h}}\left( {x/\epsilon } \right)\) refs.45,46,47, which reduces the chattering in the sliding mode control.
Remark 3
The actual front wheel angle should meet the limitations of the steering actuator: \(\left| {\delta_{f} } \right| \le \delta_{f\max }\). The maximum steering angle value \(\delta_{f\max }\) is set in the subsequent work of this paper.
Theorem 1
Take into account the system outlined by Eq. (1), where it is assumed that the upper boundary of the uncertainty, as indicated in Eq. (10), is entirely unknown. To establish a sliding surface as described in Eq. (11), the adaptive updating laws given by Eqs. (16)–(18) are employed, along with the control law specified in Eq. (15). Then, the path tracking error converges in finite time.
Proof 1
Defining the positive definite Lyapunov function \(V_{1} = \frac{1}{2}s_{1}^{2} + \tau_{2} r_{2} \sum\limits_{i = 0}^{2} {\frac{1}{{2\Upsilon_{i} }}\left( {\hat{\theta }_{i} - \theta_{i} } \right)^{2} }\), operating on its first-order derivatives and dividing \(\dot{\tilde{\theta }}_{i} = \dot{\hat{\theta }}_{i}\) and Eq. (12), leads to the following perform a first order derivative of it, and bring in to obtain the following.
By bringing the path tracking error (6), the total control law (15) and the adaptive updating laws (16)-(18) into the above equation:
According to Assumption 2, leads to
Lemma 148: If there exists a continuous Lyapunov function \(V\) satisfies the following conditions as
\(V\left( t \right)\) would converge to zero in a finite time and the convergence time is
To demonstrate stability in finite time, consider the following Lyapunov function
where \(\eta_{1} = 2\tau_{2} r_{2} \left| {\dot{e}} \right|^{{r_{2} - 1}} k_{1}\), \(\eta_{2} = \sqrt 2 \tau_{2} r_{2} \left| {\dot{e}} \right|^{{r_{2} - 1}} \varepsilon_{1}\). Based on Lemma 1, the tracking error \(e\) for the trajectory can reach the equilibrium point in a finite duration. By defining the time required for this convergence process as \(T_{r}\), the following equation must be satisfied:
Longitudinal speed tracking controller
Considering the model parameters uncertainty and external disturbances, Eq. (2) in system (1) is reformulated as the follows:
where \(f_{2} = v_{y} \omega_{r} - \frac{{\left( {F_{Yfl} + F_{Yfr} } \right)\sin \delta_{f} }}{m}\) is the nominal parameter, \(b_{2} = \frac{1}{m}\) denotes the coefficient of the system input \(F_{xd}\), \(\Delta f_{2}\) indicates the uncertainty associated with the vehicle’s longitudinal speed tracking system and \(d_{2} \left( t \right)\) signifies the external disturbances affecting the system.
Taking Eq. (28) into the third term of Eq. (5)
In the above equation, \(F_{2} = f_{2} - \dot{v}_{{x_{d} }}\), \(D_{2} \left( t \right) = \Delta f_{2} + d_{2} \left( t \right)\), and \(B_{2} = b_{2}\) represent the lumped uncertainty. Similar to the previous path tracking controller, Assumption 2 is also assumed to achieves the tracking objective and ensure finite convergence time for the longitudinal speed tracking controller. Since the longitudinal speed tracking error model contains only first-order derivatives, the following sliding mode surface is designed:
where \(\sigma = \int_{0}^{t} {e_{{v_{x} }} } dt\), \(1 < p_{1} < 2\) and \(p_{1} > p_{2}\). \(\eta_{1}\) and \(\eta_{2}\) are positive constants. Derivation of Eq. ((30) and bringing Eq. (29) without considering the set lumped disturbances can be obtained:
The equivalent control law for the total longitudinal demand force is expressed as:
The switching control law is designed to
Therefore, the control law to the longitudinal demand force can be formulated as follows
where \(\hat{\vartheta }_{0}\), \(\hat{\vartheta }_{1}\) and \(\hat{\vartheta }_{2}\) are estimates of the adaptive law gain, defined as \(\tilde{\vartheta }_{i} = \hat{\vartheta }_{i} - \vartheta_{i} \left( {i = 0,1,2} \right)\). Similarly the following formulas can be obtained according to the aforementioned Assumption 2
where \(R_{0}\), \(R_{1}\) and \(R_{2}\) are positives numbers. Define the adaptive errors as \(\tilde{\vartheta }_{0} = \hat{\vartheta }_{0} - \vartheta_{0}\), \(\tilde{\vartheta }_{1} = \hat{\vartheta }_{1} - \vartheta_{1}\) and \(\tilde{\vartheta }_{2} = \hat{\vartheta }_{2} - \vartheta_{2}\), while \(\tilde{\vartheta }_{i}\) denotes the difference between the estimated value and the actual value. Based on Assumption 2, it is possible to derive \(\dot{\tilde{\vartheta }}_{i} = \dot{\hat{\vartheta }}_{i}\).
Remark 4
The same use is applied here as in the previous Remark 2.
Theorem 2
Consider the longitudinal speed tracking system for vehicle dynamics, which operates under uncertainty and time-varying disturbances (1). By implementing of an adaptive robust controller (34) along with adaptive updates laws (35)–(37), the system can achieve accurate speed tracking despite performance constraints, ensuring that it reaches the equilibrium position in finite time.
Proof 2
This proof shares similarities with Theorem 1 and will therefore not be discussed further to prevent redundancy.
Lower torque optimization allocation
With the desired longitudinal forces and front steering angle established, it is essential to perform control distribution to achieve an optimal allocation of longitudinal torque among the four wheels. The connection between the longitudinal force and torque can be represented as \(F_{Xij} = \frac{{T_{Xij} }}{R}\). This study enhances torque distribution to achieve a reduction in the tire loading rate, while taking into account the necessary yaw moment and overall driving torque, along with the constraints that pertain to the actuator’s physical properties and the friction conditions of the road. As a result, the previously mentioned objective function and its constraints can be set up as follows for solving:
where \(F_{zij}\) indicates the vertical load on each wheel, \(\kappa_{ij}\) represents the weighting factor, \(\mu\) denotes the road adhesion factor, and \(T_{d\max }\) signifies the maximum value of driving torque.
According to the objective function and constraints determined above, Eq. (38) is rewritten into the following quadratic programming form to solve:
where the input matrix is \({\mathbf{u}} = \left( {\begin{array}{*{20}c} {F_{Xfl} } \\ {F_{Xfr} } \\ {F_{Xrl} } \\ {F_{Xrr} } \\ \end{array} } \right)\). \({\mathbf{Q}} = {\text{diag}}\left( {\begin{array}{*{20}c} {\frac{{2\kappa_{fl} }}{{\left( {\mu_{fl} F_{zfl} } \right)^{2} }}} & {\frac{{2\kappa_{fr} }}{{\left( {\mu_{fr} F_{zfr} } \right)^{2} }}} & {\frac{{2\kappa_{rl} }}{{\left( {\mu_{rl} F_{zrl} } \right)^{2} }}} & {\frac{{2\kappa_{rr} }}{{\left( {\mu_{rr} F_{zrr} } \right)^{2} }}} \\ \end{array} } \right)\) and \({\mathbf{H}} = \left( {\begin{array}{*{20}c} {\cos \delta_{f} } & {\cos \delta_{f} } & 1 & 1 \\ {a\sin \delta_{f} - \frac{B}{2}\cos \delta_{f} } & {a\sin \delta_{f} + \frac{B}{2}\cos \delta_{f} } & { - \frac{B}{2}} & \frac{B}{2} \\ \end{array} } \right)\) denote the quadratic terms of the input matrix and the action matrix \({\mathbf{v}} = \left( {\begin{array}{*{20}c} {F_{xd} } \\ {M_{z} } \\ \end{array} } \right)\), and \({\mathbf{u}}_{\max } = \min \left\{ {\frac{{T_{d\max } }}{{R_{e} }},\sqrt {\left( {\mu F_{zij} } \right)^{2} - F_{Yij}^{2} } } \right\}\) is an inequality constraint.
Results and discussion
In this part, simulations were carried out within the Carsim and Simulink environments to assess how effective the proposed ARNFTSMC scheme is for tracking trajectories in complicated scenarios. The parameters for the vehicle model used in Carsim are detailed in Table 1, while the parameters for the controller are located in (Table 2). To better illustrate the advantages of the proposed controllers, this study compares the SMC and TSMC controllers.
This research centers on managing an intelligent vehicle to follow a designated route in intricate situations, in which the reference path is supplied directly. A desired speed of 80 \(km/h\) was selected, and the double-lane change reference path49 is described by lateral position \(Y_{d}\) and yaw angle \(\psi_{d}\) as functions of longitudinal speed \(v_{x}\).
where \(r_{1} = \left( {2.4/25} \right)\left( {v_{x} - 60} \right) - 1.2\), \(r_{2} = \left( {2.4/25} \right)\left( {v_{x} - 120} \right) - 1.2\), \(d_{y1} = 3.6\), \(d_{y2} = 3.6\), \(d_{\psi 1} = 25\), and \(d_{\psi 2} = 25\).
Condition A: Trajectory tracking control with internal parameter uncertainties.
This study compares and analyzes the scenarios SMC, TSMC, and ARNFTSMC proposed in this paper, focusing on the uncertainty in vehicle system parameters as internal disturbance factors. The desired speed is established as \(80km/h\), while the adhesion coefficient is represented by \(\mu = 0.8\). The vehicle mass \(m\) and rotational inertia \(I_{z}\) are increased by 300 \(kg\) and 300 \(kg \cdot m^{2}\), respectively.
The effects of trajectory tracking control and the results of dynamic response simulations are shown in Fig. 4, whereas Fig. 5 illustrates the control inputs. In Fig. 4a, the global positions of the vehicle using different control methods are depicted. Although SMC, TSMC, and ARNFTSMC are all capable of efficiently guiding a vehicle to closely follow a reference trajectory, however, ARNFTSMC is superior in tracking performance. As shown in Fig. 4c,d, the lateral offset and orientation errors associated with ARNFTSMC are significantly smaller than those of the other two controllers. Figure 4b depicts the vehicle’s performance in tracking longitudinal speed for various control approaches, with ARNFTSMC indicating improved control proficiency. Finally, Fig. 4e,f show the dynamic response results, especially the sideslip angle and yaw rate.

The trajectory tracking control effect and dynamics response simulation results for condition A. (a) Global position. (b) Longitudinal speed tracking. (c) Lateral offset error. (d) Orientation error. (e) Response curve of side slip angle. (f) Response curve of yaw rate.

The trajectory tracking control inputs simulation results for condition A. (a) Front-wheel steering angle inputs. (b) Four-wheel torque inputs (ARNFTSMC). (c) Four-wheel torque inputs (TSMC). (d) Four-wheel torque inputs (SMC).
Figure 5a shows the input of front wheel angle and Fig. 5b–d show the longitudinal torque for ARNFTSMC, TSMC and SMC respectively. Taken together, the control cost of ARNFTSMC is lower than that of SMC and TSMC and is within reasonable limits.
To specifically compare the trajectory tracking control performance, this paper utilizes the root mean square error (RMSE) along with the maximum value (MAX) of the tracking error as performance evaluation indices.
where \(n\) represents the number of samples, \(e\) can denote the lateral offset \(e_{d}\), orientation error \(e_{\psi }\) and vehicle longitudinal speed error \(e_{{v_{x} }}\). The effectiveness of the proposed control approach, ARNFTSMC, is evaluated in relation to SMC and TSMC, as shown in (Table 3).
In conclusion, both Fig. 4 and Table 3 demonstrate that ARNFTSMC not only achieves superior control accuracy but also enhances the system’s response speed. The improved control accuracy is attributed to the adaptive law inherent in the design, which bolsters the system’s robustness and adaptability. Meanwhile, the increased response speed results from the incorporation of a nonlinear function, ensuring that the tracking error is confined within a finite time.
Condition B: Trajectory tracking control with sudden changes in road adhesion coefficients.
This set of simulations compares and analyzes the control performance of SMC, TSMC, and ARNFTSMC for trajectory tracking applications, utilizing the sudden change in the road surface adhesion coefficient as an external disturbance factor. The reference path of the vehicle and the variation in the road surface adhesion coefficient are illustrated in Fig. 6. The nominal pavement adhesion coefficient is 0.8 (represented by the black solid line in (Fig. 6), while the actual road adhesion coefficient of the vehicle experiences an abrupt change to 0.4 (indicated by the red double-dotted line in (Fig. 6) between 70–80 m and 130–140 m during the vehicle’s operation. Table 4 shows the results of the simulation. Figure 7 illustrates the impact of trajectory tracking control along with the dynamic response, whereas the control inputs are represented in Fig. 8.

Reference trajectory for the condition of sudden change in road adhesion coefficient.

The trajectory tracking control effect and dynamics response simulation results for condition B. (a) Global position. (b) Longitudinal speed tracking. (c) Lateral offset error. (d) Orientation error. (e) Response curve of side slip angle. (f) Response curve of yaw rate.

The trajectory tracking control inputs simulation results for condition B. (a) Front-wheel steering angle inputs. (b) Four-wheel torque inputs (ARNFTSMC). (c) Four-wheel torque inputs (TSMC). (d) Four-wheel torque inputs (SMC).
As illustrated in Fig. 7 and Table 4, all three controllers effectively ensure vehicle trajectory tracking accuracy and stability despite variations in the road adhesion coefficient. However, in terms of overall control performance, the ARNFTSMC outperforms both the SMC and the TSMC. Specifically, ARNFTSMC reduces the MAX lateral offset error of vehicle tracking by 0.01509 and 0.14066 m, as well as the RMSE by 5.9% and 21.8%, respectively, when compared to SMC and TSMC. Regarding orientation error, ARNFTSMC shows an increase in the MAX error of 0.00118 rad and a decrease in RMSE by 5% compared to SMC, while it demonstrates a decrease in MAX error by 0.00835 rad and a reduction in RMSE by 19.5% when compared to TSMC. Furthermore, the MAX and RMSE of longitudinal speed error for ARNFTSMC decreased by 0.08749 \(km/h\) and 38.7% relative to SMC, whereas these values increased by 0.02947 \(km/h\) and 28.6% compared to TSMC. The dynamic response curves for the side slip angle and yaw rate of the three controllers, depicted in Fig. 7e,f, reveal minor differences in control performance.
The inputs for control are shown in (Fig. 8). In particular, Fig. 8a depicts the steering angle of the front wheel, revealing that the cost associated with controlling this angle across the three methods is relatively consistent and remains within acceptable limits. Additionally, Figs. 8b–d present the outcomes of the optimized distribution of longitudinal torque for the three control processes.
To conclude, the analyses outlined in this study demonstrate that the ARNFTSMC control approach introduced here effectively tackles the problem of random disturbances encountered on the road. This method improves the accuracy, robustness, and responsiveness of the controller, thanks to the novel design of the adaptive law and the integration of a nonlinear function.
Condition C: Trajectory tracking control with sidewind disturbance.
In this research group, side wind is introduced as an external disturbance factor in the simulations to evaluate the control robustness of three controllers: SMC, TSMC, and ARNFTSMC. Figure 9 demonstrates the curves of wind direction and velocity of the side wind concerning the position of the vehicle while driving. Figure 10 presents the simulation curves for trajectory tracking and dynamic response. Figure 11 illustrates the inputs for the front wheel steering angle and the longitudinal moment. Table 5 presents a summary of the errors in lateral offset, orientation, and longitudinal speed.

Side wind disturbance input.

The trajectory tracking control effect and dynamics response simulation results for condition C. (a) Global position. (b) Longitudinal speed tracking. (c) Lateral offset error. (d) Orientation error. (e) Response curve of side slip angle. (f) Response curve of yaw rate.

The trajectory tracking control inputs simulation results for condition C. (a) Front-wheel steering angle inputs. (b) Four-wheel torque inputs (ARNFTSMC). (c) Four-wheel torque inputs (TSMC). (d) Four-wheel torque inputs (SMC).
As illustrated in Fig. 9, the wind heading, represented by the black solid line, exhibits variability, registering −90° within the 90 to 120 m segment and 90° in the subsequent 90 to 120 m segment along the longitudinal trajectory of the vehicle. The red solid line in Fig. 9 depicts the change in wind speed, beginning at 0 \(km/h\) and increasing until the vehicle attains a speed of 50 \(km/h\) at approximately 110 m. The vehicle then maintains a wind speed of 50 \(km/h\) while covering an additional distance of about 110 m. After reaching 220 m, the wind speed begins to decline, ultimately reducing to 0 \(km/h\) at around 334 m.
Figure 10 shows the simulation curves for trajectory tracking and dynamic response. It is clear that all three controllers successfully follow the desired trajectory even in the presence of crosswinds, with the ARNFTSMC exhibiting the best performance. Notably, if the gains of the SMC and TSMC controllers are adjusted too high or too low, the vehicle’s trajectory may deviate from the stabilization region, leading to control inputs that fall outside a reasonable range, which may not be suitable for real-world scenarios. In other words, the adjustments to the gains of the SMC and TSMC controllers must be done carefully and cannot be made indiscriminately. To address this challenge, the ARNFTSMC method proposed in this paper serves as an excellent alternative. Figure 11 illustrates that both path tracking and speed tracking utilizing ARNFTSMC control demonstrate curves that closely match the reference trajectory and target speed, achieving a convergence time superior to the other two methods. This improvement can be attributed to the incorporation of an adaptive law and a nonlinear function, which effectively counteract disturbances caused by side winds. Consequently, the ARNFTSMC method significantly mitigates the impact of side winds, allowing for smaller gains to still provide satisfactory robustness in the resulting closed-loop system.
Conclusion
This research presents a novel adaptive robust non-singular fast terminal sliding mode control approach, targeting the resolution of trajectory tracking control challenges in intelligent vehicle systems influenced by uncertainties and external disturbances. The adaptive control law that has been developed not only successfully reduces the variations in the vehicle system’s internal parameters and the impact of external disturbances but also does so without needing prior information about the upper limit of the lumped uncertainty. By applying Lyapunov stability theory, this study shows that the suggested control law is capable of guaranteeing convergence of the path tracking error and the longitudinal speed tracking error within a finite timeframe, all while successfully addressing the issues of singularity and chattering. The lower torque optimization allocation strategy is established. In this study, simulation experiments were conducted to compare the proposed ARNFTSMC method with the SMC and TSMC under three distinct working conditions. The analysis of the data presented in the figures and tables reveals that the ARNFTSMC method demonstrates significant advantages over the other two methods across multiple dimensions, including control effectiveness, dynamic response, control input, and tracking error accuracy. The proposed method’s effectiveness and superiority are demonstrated through numerical simulations conducted under conditions where the vehicle system encounters uncertainties in internal parameters and external disturbances.
Data availability
Data is provided within the manuscript.
References
Li, X., Sun, Z., Cao, D., Liu, D. & He, H. Development of a new integrated local trajectory planning and tracking control framework for autonomous ground vehicles. Mech. Syst. Signal Process. 87, 118–137 (2017).
Paden, B., Cap, M., Yong, S. Z., Yershov, D. & Frazzoli, E. A survey of motion planning and control techniques for self-driving urban vehicles. IEEE Trans. Intell. Veh. 1, 33–55 (2016).
Chen, J., Shuai, Z., Zhang, H. & Zhao, W. Path following control of autonomous four-wheel-independent-drive electric vehicles via second-order sliding mode and nonlinear disturbance observer techniques. IEEE Trans. Industr. Electron. 68, 2460–2469 (2021).
Xu, S. & Peng, H. Design, analysis, and experiments of preview path tracking control for autonomous vehicles. IEEE Trans. Intell. Transp. Syst. 21, 48–58 (2020).
Thrun, S. et al. Stanley: The robot that won the DARPA grand challenge. J. Field Robot. 23, 661–692 (2006).
Yang, Z., Huang, J., Yang, D. & Zhong, Z. Design and optimization of robust path tracking control for autonomous vehicles with fuzzy uncertainty. IEEE Trans. Fuzzy Syst. 30, 1788–1800 (2022).
Zhang, C. et al. A novel fuzzy observer-based steering control approach for path tracking in autonomous vehicles. IEEE Trans. Fuzzy Syst. 27, 278–290 (2019).
Zhang, L. et al. Channel-level event-triggered communication scheme for path tracking control of autonomous ground vehicles with distributed sensors. IEEE Trans. Veh. Technol. 72, 12553–12566 (2023).
Marino, R., Scalzi, S. & Netto, M. Nested PID steering control for lane keeping in autonomous vehicles. Control. Eng. Pract. 19, 1459–1467 (2011).
Zhou, X., Wang, Z., Shen, H. & Wang, J. Robust adaptive path-tracking control of autonomous ground vehicles with considerations of steering system backlash. IEEE Trans. Intell. Veh. 7, 315–325 (2022).
Hu, C., Wang, R., Yan, F. & Chen, N. Should the desired heading in path following of autonomous vehicles be the tangent direction of the desired path?. IEEE Trans. Intell. Transp. Syst. 16, 3084–3094 (2015).
Faulwasser, T. & Findeisen, R. Nonlinear model predictive control for constrained output path following. IEEE Trans. Autom. Control 61, 1026–1039 (2016).
Guo, H., Cao, D., Chen, H., Sun, Z. & Hu, Y. Model predictive path following control for autonomous cars considering a measurable disturbance: Implementation, testing, and verification. Mech. Syst. Signal Process. 118, 41–60 (2019).
Chen, G. et al. Design and experimental evaluation of an efficient MPC-based lateral motion controller considering path preview for autonomous vehicles. Control. Eng. Pract. 123, 105164 (2022).
Rosenfelder, M., Ebel, H., Krauspenhaar, J. & Eberhard, P. Model predictive control of non-holonomic systems: Beyond differential-drive vehicles. Automatica 152, 110972 (2023).
Tran, N. S., Lai, K. L. & Dao, P. N. A novel model predictive control for an autonomous four-wheel independent vehicle. Int. J. Mechan. Eng. Robot. Res. 13, 509–515 (2024).
Deylami, A. & Izadbakhsh, A. FAT-based robust adaptive control of cooperative multiple manipulators without velocity measurement. Robotica 40, 1732–1762 (2022).
Izadbakhsh, A. & Nikdel, N. Robust adaptive control of cooperative multiple manipulators based on the Stancu-Chlodowsky universal approximator. Commun. Nonlinear Sci. Numer. Simul. https://doi.org/10.1016/j.cnsns.2022.106471 (2022).
Hosseini-Pishrobat, M. & Keighobadi, J. Extended state observer-based robust non-linear integral dynamic surface control for triaxial MEMS gyroscope. Robotica 37, 481–501 (2019).
Hosseini-Pishrobat, M., Keighobadi, J., Oveisi, A. & Nestorović, T. Robust linear output regulation using extended state observer. Math. Probl. Eng. 2018, 1–12 (2018).
de Castro, R., Araújo, R. E. & Freitas, D. Wheel slip control of evs based on sliding mode technique with conditional integrators. IEEE Trans. Industr. Electron. 60, 3256–3271 (2013).
Milani, S. et al. Smart autodriver algorithm for real-time autonomous vehicle trajectory control. IEEE Trans. Intell. Transp. Syst. 23, 1984–1995 (2022).
Guo, J., Luo, Y. & Li, K. Adaptive fuzzy sliding mode control for coordinated longitudinal and lateral motions of multiple autonomous vehicles in a platoon. Sci. Ch. Technol. Sci. 60, 576–586 (2017).
Mok, Y. M., Zhai, L., Wang, C., Zhang, X. & Hou, Y. A post impact stability control for four hub-motor independent-drive electric vehicles. IEEE Trans. Veh. Technol. 71, 1384–1396 (2022).
Utkin, V., Poznyak, A., Orlov, Y. & Polyakov, A. Conventional and high order sliding mode control. J. Franklin Inst. 357, 10244–10261 (2020).
Yu, X., Feng, Y. & Man, Z. Terminal sliding mode control—An overview. IEEE Open J. Ind. Electron. Soc. 2, 36–52 (2021).
Venkataraman, S. T. & Gulati, S. Control of nonlinear systems using terminal sliding modes. J. Dyn. Syst. Meas. Contr. 115, 554–560 (1993).
Zhihong, M., Paplinski, A. P. & Wu, H. R. A robust MIMO terminal sliding mode control scheme for rigid robotic manipulators. IEEE Trans. Autom. Control 39, 2464–2469 (1994).
Guo, G., Zhao, Z. & Zhang, R. Distributed trajectory optimization and fixed-time tracking control of a group of connected vehicles. IEEE Trans. Veh. Technol. 72, 1478–1487 (2023).
Wang, H. et al. Design and Implementation of adaptive terminal sliding-mode control on a steer-by-wire equipped road vehicle. IEEE Trans. Industr. Electron. 63, 5774–5785 (2016).
Shen, G., Xia, Y., Cui, B. & Huang, P. Integral terminal sliding-mode-based singularity-free finite-time tracking control for entry vehicle with input saturation. Aerosp. Sci. Technol. 136, 108260 (2023).
Ma, L., Mei, K. & Ding, S. Direct yaw-moment control design for in-wheel electric vehicle with composite terminal sliding mode. Nonlinear Dyn. 111, 17141–17156 (2023).
Ding, S. & Sun, J. Direct yaw-moment control for 4WID electric vehicle via finite-time control technique. Nonlinear Dyn. 88, 239–254 (2017).
Li, S. E., Deng, K., Li, K. & Ahn, C. Terminal sliding mode control of automated car-following system without reliance on longitudinal acceleration information. Mechatronics 30, 327–337 (2015).
Feng, Y., Yu, X. & Man, Z. Non-singular terminal sliding mode control of rigid manipulators. Automatica 38, 2159–2167 (2002).
Corradini, M. L. & Cristofaro, A. Nonsingular terminal sliding-mode control of nonlinear planar systems with global fixed-time stability guarantees. Automatica 95, 561–565 (2018).
Wu, Y., Wang, L., Zhang, J. & Li, F. Path following control of autonomous ground vehicle based on nonsingular terminal sliding mode and active disturbance rejection control. IEEE Trans. Veh. Technol. 68, 6379–6390 (2019).
Sun, X. et al. Nonsingular terminal sliding mode-based direct yaw moment control for four-wheel independently actuated autonomous vehicles. IEEE Trans. Transport. Electrif. 9, 2568–2582 (2023).
Zhang, J. et al. Active front steering-based electronic stability control for steer-by-wire vehicles via terminal sliding mode and extreme learning machine. IEEE Trans. Veh. Technol. 69, 14713–14726 (2020).
Mousavinejad, E., Han, Q.-L., Yang, F., Zhu, Y. & Vlacic, L. Integrated control of ground vehicles dynamics via advanced terminal sliding mode control. Veh. Syst. Dyn. 55, 268–294 (2017).
Guo, J., Luo, Y. & Li, K. An adaptive hierarchical trajectory following control approach of autonomous four-wheel independent drive electric vehicles. IEEE Trans. Intell. Transport. Syst. 19, 2482–2492 (2018).
Mata, S., Zubizarreta, A. & Pinto, C. Robust tube-based model predictive control for lateral path tracking. IEEE Trans. Intell. Veh. 4, 569–577 (2019).
Sabbioni, E., Bao, R., Cheli, F. & Tarsitano, D. A particle filter approach for identifying tire model parameters from full-scale experimental tests. J. Mechan. Des. 139, 021403 (2017).
Zhihong, M. & Yu, X. Adaptive terminal sliding mode tracking control for rigid robotic manipulators with uncertain dynamics. JSME Int. J. Ser. C 40, 493–502 (1997).
Keighobadi, J., Mohammadian KhalafAnsar, H. & Naseradinmousavi, P. Adaptive neural dynamic surface control for uniform energy exploitation of floating wind turbine. Appl. Energy 316, 119132 (2022).
Keighobadi, J., Hosseini-Pishrobat, M. & Faraji, J. Adaptive neural dynamic surface control of mechanical systems using integral terminal sliding mode. Neurocomputing 379, 141–151 (2020).
Moghanni-Bavil-Olyaei, M. R., Keighobadi, J., Ghanbari, A. & Olegovna Zekiy, A. Passivity-based hierarchical sliding mode control/observer of underactuated mechanical systems. J. Vib. Control 29, 3096–3111 (2023).
Yu, X. & Zhihong, M. Fast terminal sliding-mode control design for nonlinear dynamical systems. IEEE Trans. Circuits Syst. I Fundam. Theory Appl. 49, 261–264 (2002).
Falcone, P., Borrelli, F., Asgari, J., Tseng, H. E. & Hrovat, D. Predictive active steering control for autonomous vehicle systems. IEEE Trans. Control Syst. Technol. 15, 566–580 (2007).
Acknowledgements
This work is financially supported by School of Vehicle and Energy, Yanshan University.
Author information
Authors and Affiliations
Contributions
Min Gao: Writing—original draft, Visualization, Methodology, Investigation, Formal analysis, Data curation. Jin Li: Writing—review & editing, Supervision. Taihong Hu: Writing—review & editing. Jin Luo: Writing—review & editing. Baidong Feng: Writing—review & editing.
Corresponding author
Ethics declarations
Competing interests
The authors declare no competing interests.
Additional information
Publisher’s note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
Open Access This article is licensed under a Creative Commons Attribution-NonCommercial-NoDerivatives 4.0 International License, which permits any non-commercial use, sharing, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons licence, and indicate if you modified the licensed material. You do not have permission under this licence to share adapted material derived from this article or parts of it. The images or other third party material in this article are included in the article’s Creative Commons licence, unless indicated otherwise in a credit line to the material. If material is not included in the article’s Creative Commons licence and your intended use is not permitted by statutory regulation or exceeds the permitted use, you will need to obtain permission directly from the copyright holder. To view a copy of this licence, visit http://creativecommons.org/licenses/by-nc-nd/4.0/.
About this article

Cite this article
Gao, M., Li, J., Hu, T. et al. Intelligent vehicle trajectory tracking with an adaptive robust nonsingular fast terminal sliding mode control in complex scenarios. Sci Rep 14, 31085 (2024). https://doi.org/10.1038/s41598-024-82021-6
Received:
Accepted:
Published:
Version of record:
DOI: https://doi.org/10.1038/s41598-024-82021-6
Keywords
This article is cited by
-
Robust dynamic event-triggered sliding mode control for lateral dynamics of intelligent electric vehicle
Scientific Reports (2025)
