
Abstract
Chipless Radio Frequency Identification (RFID) has emerged as a promising technology for battery-free and maintenance-free sensing in Internet of Things (IoT) applications, particularly in smart agriculture where large-scale deployment and long-term autonomy are essential. However, practical agricultural sensing requires more than isolated tag or sensor designs; it demands an integrated system that jointly supports high-capacity identification, reliable multi-parameter environmental monitoring, and robust data interpretation within realistic radio-frequency (RF) environments. This work presents an IoT-ready chipless RFID framework that unifies resonator-based tag design, functional sensing materials, and physics-guided machine learning within a coherent hardware–analytics architecture. A compact 24-bit chipless RFID identification tag based on T-shaped resonators is designed within a 60 × 40 mm2 footprint, achieving dense encoding with approximately 100 MHz spectral spacing. The tag is validated through full-wave CST simulations and anechoic-chamber radar cross-section (RCS) measurements, demonstrating high-Q, well-isolated spectral notches. Building on this platform, a 12-resonator sensing variant is developed for dual-parameter microclimate monitoring, exploiting the temperature-sensitive permittivity of Taconic RF-35 and the humidity responsiveness of a Kapton HN/PVA bilayer, with approximately 160 MHz reserved per sensing slot to prevent spectral overlap. To enable reliable operation under deployment-realistic interference, a physics-driven, edge-deployable machine learning framework is introduced, operating on interpretable RCS features rather than raw spectra. A hybrid ensemble combining Random Forest, Support Vector Regression, and XGBoost models are developed and augmented with k-means–based anomaly detection. This framework achieves 96.2% temperature-bin classification accuracy, with mean errors of ± 1.3 °C for temperature and ± 2.1% for relative humidity under frequency jitter, attenuation, and multipath distortions. The proposed co-design demonstrates a scalable, interpretable, and energy-autonomous solution for precision agriculture. It is compatible with edge gateways and cloud or serverless IoT infrastructures.
Similar content being viewed by others


Introduction
The contemporary era of digital transformation has been marked by unprecedented advancements in wireless communication technologies, driven by breakthroughs in electronics, embedded systems, and information processing. These innovations have accelerated the widespread deployment of sensor networks, which now serve as a technological backbone of the Internet of Things (IoT)1,2,3,4. The IoT paradigm represents an ecosystem of interconnected physical devices (“things”) equipped with sensing, computation, and communication capabilities to enable autonomous data exchange across heterogeneous environments. Such nodes can sense operational conditions, perform preliminary processing, and transmit actionable information without continuous human intervention. This capability has become indispensable across domains such as industrial automation, environmental monitoring, smart healthcare, and, notably, data-driven smart agriculture that relies on distributed sensing for crop, soil, and microclimate management5,6.
In agriculture-focused IoT deployments, the sensing infrastructure must meet strict constraints: it must be low-cost, maintenance-free, and energy-efficient, while also remaining reliable under harsh outdoor conditions and intermittent connectivity. These requirements are difficult to satisfy using battery-powered sensor nodes at scale due to replacement and maintenance burdens. Consequently, there is strong interest in passive sensing approaches that can support large-area monitoring with minimal upkeep. In this context, Radio Frequency Identification (RFID) has emerged as a cornerstone technology because it can provide identification and sensing capabilities through backscatter-based interrogation with minimal tag-side complexity.
Traditional RFID systems rely on silicon-based integrated circuits and have achieved broad commercial success, but they face inherent limitations including higher cost, manufacturing complexity, and environmental concerns7,8,9. These constraints have driven increasing interest in chipless RFID, which eliminates the silicon chip while retaining core functionalities through resonant structures and scattering-based encoding. Chipless tags can be fabricated using conductive patterns (including printing processes) on flexible substrates, enabling mass-producible and potentially disposable deployments. Many chipless RFID systems utilize frequency-domain (FD) encoding, where resonant structures are engineered to produce distinct spectral notches that represent information bits10. Such frequency-selective responses are conceptually related to metamaterial-based absorbers11, illustrating how engineered resonators can generate multi-band responses with high spectral selectivity.
Complementary to FD techniques, time-domain (TD) chipless RFID approaches embed information into temporal features such as time delays or phase shifts in the tag response12,13. Among these, FD methods—particularly those leveraging radar cross-section (RCS) analysis—have gained prominence due to their simplicity and robust encoding potential14,15. In RCS-based systems, the tag’s structural parameters (geometry, dimensions, and materials) are tailored to shape its electromagnetic reflection characteristics, enabling data retrieval from the scattered response. This RCS-centric perspective is especially suitable for IoT-scale deployments, where decoding must remain stable under channel impairments and environmental variability.
The sustainability and scalability of chipless RFID have positioned it as a compelling solution for ubiquitous sensing in IoT applications16,17,18,19,20. Recent literature has reported chipless RFID sensors capable of monitoring humidity21,22, temperature23,24,25, structural integrity26, gas concentrations27, and displacement28. These sensors often employ functional materials whose electromagnetic properties change predictably under environmental stimuli, producing measurable resonance shifts. Despite this progress, practical challenges remain in standardizing signal interpretation across heterogeneous tag designs, materials, and encoding schemes. Moreover, conventional signal-processing techniques—such as Short-Time Fourier Transform (STFT), wavelet transforms, and threshold-based approaches—often struggle with robustness, resolution, and generalization across tag configurations and deployment conditions29,30,31,32.
A particularly compelling application domain is smart agriculture, where continuous environmental monitoring is essential for optimizing irrigation and fertilizer scheduling, greenhouse climate control, post-harvest storage, and overall resource efficiency. Chipless RFID sensors for temperature and humidity are especially valuable in this context, supporting microclimate regulation in greenhouses, real-time field monitoring for disease prevention, and water-use optimization for precision irrigation33,34,35,36. Their passive operation minimizes power consumption, and their thin form factors enable integration into farm infrastructure, packaging, and natural substrates.
In this study, temperature and humidity are selected as representative sensing parameters because they are fundamental to crop growth, evapotranspiration modeling, and storage quality across diverse agricultural settings. These variables strongly influence plant health, pest pressure, and yield outcomes, making them among the most critical environmental indicators for agriculture-centric IoT deployments. By focusing on these two parameters, we demonstrate the feasibility of dual-parameter sensing in chipless RFID while establishing a scalable framework that can be extended toward additional agronomic variables (e.g., soil moisture, solar radiation, and chemical sensing relevant to plant nutrition and stress).
To improve decoding robustness beyond conventional processing, recent work has increasingly integrated machine learning (ML) into chipless RFID systems. ML methods can learn nonlinear mappings from measured tag responses to tag identity and environmental parameters, enabling classification and regression under noise, attenuation, and measurement variability. Prior studies have demonstrated regression-based estimation of temperature and humidity37,38,39, and classification pipelines using convolutional neural networks (CNNs), support vector machines (SVMs), and decision-tree models have shown strong performance in chipless RFID identification and sensing tasks40,41,42. ML can further enhance reliability by identifying patterns in noisy or nonlinear signal spaces, thereby addressing key challenges in chipless RFID deployment43,44.
However, several gaps remain. First, many existing studies focus on either identification-only operation or single-parameter sensing, with limited emphasis on unified, multi-parameter extraction. Second, CNN- and SVM-based pipelines often require large datasets and computationally expensive training while providing limited interpretability of the underlying electromagnetic mechanisms. Third, decoding is frequently treated as an offline process, whereas real smart-agriculture deployments benefit from edge intelligence at the reader or gateway level to reduce backhaul bandwidth, latency, and reliance on continuous cloud connectivity—an important requirement in rural environments.
Accordingly, this work emphasizes Edge Machine Learning over IoT for chipless RFID in a way that goes beyond describing existing RFID architecture. Our approach differs from CNN/SVM-centered pipelines in three ways: (i) we co-design the tag architecture to enhance spectral clarity and reduce inter-resonator coupling, reducing reliance on heavy feature extraction; (ii) instead of image-like spectral learning, we operate directly on physics-driven RCS features \(\left\{{f}_{0}\right.,\) notch depth, \(Q\), \(\Delta f/\Delta T\), \(\left.\Delta f/\Delta RH\right\}\), improving interpretability and reducing model complexity; and (iii) we use a hybrid ML framework combining Random Forest, SVR, and XGBoost with unsupervised anomaly detection to improve regression accuracy and robustness under distortions not fully addressed in CNN/SVM-only approaches. In the proposed IoT stack, feature extraction and inference are executed at the reader/gateway (edge node), enabling low-latency decision support while minimizing data transmission overhead.
This manuscript is firmly grounded in the authors’ prior research on resonator-based chipless RFID identification systems8,45. In Ref.8, a 12-bit chipless RFID tag employing T-shaped micro-resonators established the encoding mechanism, resonator miniaturization strategy, and RCS-based decoding principle. This foundation was extended in Ref.45 through a 24-bit high-capacity identification tag with dense frequency packing, reduced coupling via head-to-tail arrangement, and experimental validation. Building on these validated identification architectures, the present work advances toward application-oriented functionality by integrating dual-parameter environmental sensing (temperature and humidity) with physics-guided, edge-deployable ML decoding, thereby transforming the earlier identification-centric designs into a scalable, IoT-ready sensing system for smart-agriculture applications.
In particular, the proposed system integrates two distinct arrays of 12 resonators: a temperature-sensing configuration that leverages the thermally responsive dielectric properties of Taconic RF-35, and a humidity-sensing configuration using an RO4003C tag combined with a Kapton HN/polyvinyl alcohol (PVA) bilayer as a hygroscopic interface. These functional materials induce measurable and repeatable resonance shifts in response to environmental stimuli, enabling fully passive sensing without batteries or embedded electronics. The overarching objective is to establish a scalable, intelligent, and energy-efficient chipless RFID framework that unifies identification and dual-parameter sensing in a single platform, while maintaining robustness under realistic electromagnetic conditions (spectral jitter, attenuation, and multipath-like distortions) that often degrade conventional systems.
The main contributions of this work are summarized as follows: we design a compact 24-bit chipless RFID identification tag based on uniquely dimensioned T-shaped resonators with ~ 100 MHz slot spacing over 4–6.5 GHz, enabling high encoding density and clear notch discrimination. The proposed identification platform is then rigorously validated experimentally through anechoic-chamber RCS measurements of the 24-bit tag, showing strong agreement with full-wave simulations and confirming the electromagnetic modeling framework adopted in this study. Building on this validated foundation, we establish a clear 12-resonator baseline (12-bit identification tag on RO4003C, Sect. "12-resonator identification tag on RO4003C: electromagnetic simulation and performance evaluation") and develop 12-resonator sensing variants (Sect. "Design and development of chipless RFID sensors") that preserve the same resonator geometry while modifying only the material stack—Taconic RF-35 for temperature sensing and RO4003C with a Kapton HN/PVA overlay for humidity sensing. This enables dual-parameter microclimate sensing, where temperature- and humidity-sensitive configurations are engineered with reserved spectral allocation (~ 160–200 MHz per resonator) to prevent overlap and maintain spectral stability during stimulus-induced resonance shifts. On the analytics side, we introduce a physics-guided, interpretable ML decoding pipeline operating on RCS-derived physical features \(\left\{{f}_{0}\right.\), notch depth, \(Q\), \(\Delta f/\Delta T\), \(\left.\Delta f/\Delta RH\right\}\), using Random Forest/SVR/XGBoost combined with k-means–based anomaly detection to ensure robust inference under noise and distortions. Finally, we demonstrate edge–cloud IoT integration by executing feature extraction and inference at the reader/gateway (edge) and interfacing with cloud/serverless analytics (digital-twin-ready workflow), thereby reducing data transmission overhead and supporting scalable monitoring and control for smart-agriculture deployments.
The remainder of this paper is organized as follows. Section "Chipless RFID tag operation within IoT-enabled smart agriculture systems" presents the fundamental operational principles of chipless RFID tags within IoT-enabled smart-agriculture systems, explaining how backscatter communication supports passive, large-scale sensing. Section "Chipless tag structure and resonator innovation" describes the structural design and electromagnetic modeling of the 12-resonator and 24-resonator tag architectures, emphasizing resonator miniaturization, spectral isolation, and high encoding density. Section "Design and development of chipless RFID sensors" focuses on the integration of functional materials for environmental sensing, detailing the design, simulation, and performance of temperature and humidity sensors based on Taconic RF-35 and Kapton HN/PVA layers. Section "Practical application in IoT-enabled smart agriculture: ML-integrated sensing and edge intelligence" explores the real-world applicability of the proposed system in IoT-enabled agricultural environments, highlighting the role of machine learning (ML), edge computing, and cloud orchestration in enhancing sensing reliability, data efficiency, and scalability. Finally, Sect. "Conclusion and future work" concludes the paper by summarizing key findings and outlining future research directions toward field-deployable, autonomous, and energy-efficient chipless RFID sensing systems for next-generation smart agriculture.
Chipless RFID tag operation within IoT-enabled smart agriculture systems
The operational concept of a chipless Radio Frequency Identification (RFID) tag relies on its ability to scatter a portion of an incident electromagnetic wave (EMW) back toward the reader, a process known as backscatter communication. When the RFID reader transmits an interrogation signal toward the tag, the incident EMW induces surface currents within the resonant structure of the tag. These currents selectively absorb part of the incident energy while re-radiating the remainder with a unique frequency-dependent spectral signature. The resulting backscattered response carries information encoded in the resonance behavior of the tag’s geometry.
The backscattered signal is captured by the RFID reader and transmitted to a local database or processing unit for spectral analysis and data decoding. In the proposed configuration, this system operates within an Internet of Things (IoT) framework tailored for smart agriculture applications. Here, the chipless RFID tag serves as a battery-free passive sensor and identifier, the RFID reader performs signal interrogation and backscatter collection, and the database functions as a signal-processing hub. The architecture is further extended through an IoT gateway and cloud analytics layer, which enable real-time data aggregation, visualization, and control of agricultural processes. Such integration allows distributed sensing nodes to capture key environmental parameters such as temperature, humidity, and soil moisture and transmit the information through low-power IoT networks for intelligent decision-making and automation.
As illustrated in Fig. 1, the reader emits an interrogation signal that interacts with the chipless RFID tag array. The tag’s backscattered response is then analyzed by the reader and transferred via the IoT gateway to the cloud analytics platform. Within the smart-agriculture environment, this pipeline supports automated actuation of irrigation systems, ventilation fans, and environmental controllers based on data-driven models and adaptive thresholds. This closed-loop operation demonstrates how chipless RFID technology, when coupled with IoT infrastructure, forms an energy-efficient, scalable, and cost-effective sensing ecosystem for precision agriculture46,47.

Chipless RFID backscatter and IoT pipeline for smart agriculture.
Theoretical study of the T-shaped resonator
Data are encoded by resonator-defined spectral notches: the presence of a notch at a designated frequency slot represents “1,” while its absence corresponds to “0.” The reflected radar cross section (RCS) spectrum is captured by the RFID reader, transmitted through the IoT gateway, and analyzed in the cloud analytics layer for environmental monitoring and intelligent control in smart-agriculture systems47,48,49.
The radar cross section (RCS) that quantifies the scattering strength of the tag is expressed as
In this context, ∣Escat∣ represents the amplitude of the electric field scattered by the tag, ∣Einc∣ denotes the strength of the incident electric field, and r corresponds to the distance in the far-field region. These parameters are related through Eq. (2).
where \(D\) is the largest dimension of the tag and \({\lambda }_{b}\) is the wavelength.
In this study, a chipless RFID tag comprising twenty-four T-shaped resonators provides 24-bit data encoding capacity and supports simultaneous environmental sensing. The design is simulated in CST using a linearly polarized plane-wave excitation (x-polarized), expressed as:”
where \({E}_{0}\) is the electric-field amplitude, \(\omega\) is the angular frequency, \(\text{k}\) is the wave vector, and \(\text{r}=(x,y,z)\) is the position vector50.
T-shaped resonator structure overview
The T-shaped resonator is the basic frequency-selective unit of the tag: each resonator generates a narrow spectral notch that maps to one bit in the code. Its compact geometry supports high-Q resonances and stable operation across typical tag orientations and polarizations. The resonator is fabricated on Rogers RO4003C (relative permittivity εr = 3.38, loss tangent tanδ = 0.0019, thickness h = 0.41 mm). A reference unit has dimensions L = 12 mm, W = 12.4 mm, and gap G = 3 mm on a 14 × 14 mm2 area (Fig. 2a). Full-wave CST simulations confirm a fundamental resonance near 4.1 GHz, visible as a clear notch in the RCS spectrum (Fig. 2b). For design insight, the resonator is modeled by an equivalent shunt-LC circuit (Fig. 2c). The vertical arm provides the effective inductance L = 0.74 nH) and the horizontal stub with fringing fields provides the capacitance (C = 0.2 pF). The resonance is approximated by Eq. (4):

(a) Physical configuration of the T-shaped resonator, (b) Simulated RCS magnitude showing resonance at 4.1 GHz, (c) Equivalent LC circuit representation of the T-shaped resonator.
Chipless tag structure and resonator innovation
12-resonator identification tag on RO4003C: electromagnetic simulation and performance evaluation
The 12-resonator tag comprises twelve T-shaped resonators on RO4003C (εr = 3.38, tanδ = 0.0019, h = 0.41 mm) arranged in an alternating head-to-tail pattern to limit coupling and preserve notch isolation. The same RO4003C substrate used for the single-resonator characterization in Sect. "T-shaped resonator structure overview" is employed here, ensuring material consistency between unit-cell and array results. The final footprint is 45 × 25 mm2 with two rows (5 and 7 elements). Resonator lengths and widths are tuned to place twelve distinct notches within 4–6.5 GHz, with ~ 200 MHz guard bands between adjacent slots. The tag was simulated in CST Studio Suite to validate spectral spacing and notch quality. Figure 3a shows the layout and numbering of the resonators (1–12), and the corresponding dimensions are listed in Table 1.

12-resonator chipless RFID tag. (a) Layout with resonators labeled 1–12. (b) RCS magnitude showing twelve notches for the code “111111111111”.
The normalized RCS response exhibits twelve deep, well-separated notches when all bits are active (code 111111111111), confirming correct frequency placement and high-Q behavior. The average spacing is ~ 200 MHz across the band, supporting reliable bit detection and robust decoding in practical environments. The normalized RCS magnitude for the fully active code is shown in Fig. 3b.
Figure 3b shows the normalized RCS magnitude of the 12-resonator identification tag fabricated on RO4003C for the fully active code 111111111111. Twelve deep, well-separated notches are observed across 4–6.5 GHz with approximately 200 MHz guard-banding, enabling reliable bit discrimination and reducing sensitivity to frequency crowding and cross-tag interference in dense IoT deployments. In Sect. "Design and development of chipless RFID sensors", the same 12-resonator architecture is adapted into sensing variants by modifying the material stack: Taconic RF-35 is used for temperature sensing, and an RO4003C-based tag with a Kapton HN/PVA overlay is used for humidity sensing, while preserving spectral isolation for robust tracking of stimulus-induced shifts. For higher-capacity identification, Sect. "Electromagnetic simulation and performance evaluation of a 24-bit chipless RFID tag" introduces a separate 24-bit tag employing twenty-four uniquely dimensioned T-resonators with ~ 100 MHz slot spacing to increase encoding density.
Electromagnetic simulation and performance evaluation of a 24-bit chipless RFID tag
To increase identification capacity beyond the 12-resonator prototype, we designed a 24-bit tag operating over 4–6.5 GHz. The tag integrates twenty-four T-shaped resonators on RO4003C (εr = 3.38, tanδ = 0.0019, h = 0.41 mm) the same substrate used in Sect. "T-shaped resonator structure overview" to ensure material consistency. The final footprint is 60 × 40 mm2 with three rows of resonators. Adjacent elements are arranged head-to-tail to limit coupling, and each resonator is dimensioned to occupy a distinct ~ 100 MHz frequency slot for high encoding density and notch separability. Figure 4a shows the layout; dimensions are listed in Table 2.

24-bit chipless RFID tag. (a) Layout with resonators labeled 1–24. (b) RCS magnitude showing twenty-four notches for the code “111111111111111111111111”.
The normalized RCS magnitude for the fully active code 111111111111111111111111 exhibits 24 deep, well-separated notches distributed across the band with an average spacing of 100 MHz, confirming correct frequency placement and high-Q behavior. The spectrum for this state is shown in Fig. 4b.
Figure 4, the 24-bit tag exhibits 24 deep, well-separated notches across 4–6.5 GHz with ≈100 MHz slotting (Fig. 4b), confirming high-Q behavior and unambiguous decoding. This scales identification capacity without sacrificing notch isolation and sets the stage for the experimental validation in Sect. "Experimental validation results".
Experimental validation results
To address the requirement for rigorous experimental validation, this section presents the fabrication of the proposed 24-bit chipless RFID tag, the complete anechoic-chamber measurement setup, and the corresponding radar cross-section (RCS) measurement results.
The 24-bit chipless RFID identification tag was fabricated on a Rogers RO4003C substrate with relative permittivity εr = 3.38, loss tangent tanδ = 0.0019, and thickness h = 0.41 mm, selected for its low dielectric loss and stable microwave characteristics. The fabricated prototype occupies a compact footprint of 60 × 40 mm2 and integrates twenty-four T-shaped resonators with progressively tuned dimensions. The resonators are arranged in a multi-row head-to-tail configuration to mitigate inter-resonator coupling and preserve spectral isolation at high encoding density. Standard PCB photolithography was employed using 35 μm copper cladding. After chemical etching, the tag was visually inspected to ensure dimensional accuracy and structural integrity. A photograph of the fabricated 24-bit chipless RFID tag is shown in Fig. 5a. For RCS normalization, a metallic reference plate with identical lateral dimensions (60 × 40 mm2) and a thickness of 0.3 mm was fabricated using the same process to ensure consistent surface roughness and material properties.

(a) Chipless RFID tag prototype, (b) Experimental setup for monostatic S11-based RCS measurement.
Experimental validation was carried out inside a fully anechoic chamber lined with pyramidal RF-absorbing foam panels, providing more than 40 dB attenuation over the 2–18 GHz frequency range. This controlled environment suppresses multipath propagation and external electromagnetic interference, enabling accurate and repeatable RCS measurements. A Keysight PNA5221A vector network analyzer (VNA) was used to excite and record the backscattered response. The VNA was connected to a directional coupler/circulator feeding a standard-gain horn antenna operating over the 4–7 GHz band with linear polarization. Measurements were performed in a monostatic S11 configuration, where the same antenna served as both transmitter and receiver.
The fabricated chipless RFID tag was mounted on a low-reflectivity foam holder and positioned at a distance of 30 cm from the horn antenna, ensuring far-field operation. The tag plane was oriented normal to the antenna boresight, and the incident electric field was aligned with the dominant axis of the T-shaped resonators. This alignment was kept fixed throughout all measurements to guarantee polarization consistency and repeatability. The experimental setup is illustrated in Fig. 5b. The VNA swept the frequency range from 4 to 6.5 GHz using 2501 frequency points (≈1 MHz resolution), with an intermediate-frequency bandwidth of 1 kHz, three-fold trace averaging, and a source power of 0 dBm.
To isolate the scattering contribution of the chipless RFID tag, three reflection-coefficient measurements were acquired: \({S}_{11}^{\text{tag}}\) with the fabricated tag present, \({S}_{11}^{\text{ref}}\) with the metallic reference plate, and \({S}_{11}^{\text{iso}}\) corresponding to the antenna-only background measurement. The radar cross section of the chipless RFID tag was calculated using the normalized monostatic formulation51:
where \({\sigma }_{\text{tag}}\) denotes the RCS of the chipless RFID tag and \({\sigma }^{\text{ref}}\) is the analytical RCS of the metallic reference plate, given by
with a and b denoting the plate dimensions and λ the wavelength.
To enhance notch visibility while preserving spectral fidelity, the measured RCS spectra were processed using low-order polynomial detrending to remove baseline variations, followed by Savitzky–Golay smoothing. Resonance notches were then automatically detected using prominence- and bandwidth-based criteria, enabling extraction of the resonant frequency \({f}_{0}\), notch depth, and quality factor \(Q\). These parameters were used for direct comparison with full-wave simulation results.
The fabricated tag was evaluated using the fully active 24-bit binary sequence (111111111111111111111111). The experimentally measured RCS spectrum is shown in Fig. 6. All twenty-four resonance notches are clearly observed within the 4–6.5 GHz frequency range, confirming correct frequency placement and high-Q behavior. The measured response exhibits strong agreement with full-wave simulation results in terms of notch count, spectral distribution, and overall response shape. Minor frequency deviations, typically on the order of a few megahertz, are attributed to fabrication tolerances, slight variations in substrate permittivity, and copper surface roughness inherent to commercial laminates such as Rogers RO4003C. Despite these small discrepancies, no significant notch overlap or degradation is observed, confirming that the proposed resonator arrangement effectively suppresses mutual coupling and enables robust high-density encoding.

RCS Results comparison between simulation and measurement for the 24-Bit Tag.
The close agreement between measured and simulated RCS responses validates the electromagnetic modeling framework employed in this work. This experimental validation establishes a reliable foundation for the subsequent development of temperature- and humidity-sensing variants based on the same resonator architecture, as presented in Sect "Design and development of chipless RFID sensors", and demonstrates the suitability of the proposed chipless RFID platform for IoT-enabled smart agriculture applications.
Design and development of chipless RFID sensors
Chipless RFID technology offers a flexible platform in which sensing functionality can be integrated directly into the tag, making it well suited for large-scale, battery-free environmental monitoring. Unlike conventional discrete sensor nodes which increase deployment cost, complexity, and maintenance—chipless RFID sensors provide a low-cost wireless alternative by encoding stimulus-induced electromagnetic variations into the tag’s spectral response. For clarity, the 12-resonator tag presented in Sect. "12-resonator identification tag on RO4003C: electromagnetic simulation and performance evaluation" serves as an identification baseline fabricated on RO4003C. In this section, the same resonator geometry and layout are adapted into sensing variants by modifying the material stack. Two sensor prototypes are developed: a temperature-sensing tag using the thermally responsive permittivity of Taconic RF-35, and a humidity-sensing tag based on an RO4003C substrate locally coated with a Kapton HN/PVA bilayer. The sensing mechanism relies on functional substrates and overlays whose dielectric properties vary measurably with environmental stimuli such as temperature and relative humidity, producing trackable resonance shifts in the radar cross-section response52.
Temperature-sensing chipless tag performance
For the temperature-sensing variant we use Taconic RF-35 (εr = 3.5, tanδ = 0.0018, h = 0.508 mm). RF-35’s small but predictable thermal variation of permittivity (~ + 30 ppm/°C) produces a measurable resonant-frequency shift (Δf/ΔT) that we exploit for sensing. RF-35 is used only for the temperature tag; the identification tag remains on RO4003C.
Theoretical analysis of temperature sensing
The fundamental resonance of a T-shaped resonator is approximated by53:
where c = 3 × 108 m/s, physical length L, and εeff is the effective permittivity. The effective relative permittivity can be approximated based on the substrate geometry. For cases where \(\frac{\text{W}}{\text{H}}\) ≤ 1, it is calculated using53:
Here, εr denotes the relative permittivity of the substrate, W is the resonator width, and H is the substrate thickness. As temperature increases, εr exhibits a slight rise (material polarization), which increases εeff. Because fres ∞ \(\frac{1}{{\sqrt {\varepsilon _{{eff}} } }}\), changes in εeff translate directly into measurable resonance-frequency shifts that we use for temperature sensing.
Furthermore, the variation of the relative permittivity of Taconic RF-35 with temperature is modeled by the empirical linear relation:
yielding εr ∈ [3.5, 3.58] over the operating range. Combining (7)–(9) predicts a monotonic, temperature-dependent shift in fres, which is quantified in the simulations that follow (Tables 3, 4; Fig. 3a).
12-resonator chipless RFID temperature-sensing tag: simulation study
The temperature-sensing tag uses the same footprint (45 × 25 mm2), the same resonator dimensions, and the same alternating head-to-tail layout as in Sect. "12-resonator identification tag on RO4003C: electromagnetic simulation and performance evaluation", and its behavior was simulated in CST Studio Suite; only the substrate is changed to Taconic RF-35. The relative permittivity εr of RF-35 at each temperature was computed from Eq. (9) using the thresholds in Table 3, and these εr(T) values were then used to model the tag’s electromagnetic response under the corresponding thermal conditions.
The simulated normalized RCS magnitude at four ambient temperatures (0 °C, 30 °C, 60 °C, 90 °C) is shown in Fig. 7a, with each subplot displaying the resonance behavior at a single temperature. Figure 7b overlays the spectra and shows a progressive temperature-dependent shift in the resonance frequencies. To highlight sensitivity, Fig. 7c provides a zoom around the first resonator (Res1, ≈ 4.1 GHz), demonstrating clear thermal responsiveness with preserved Q.


(a) Simulated RCS magnitude of the chipless RFID tag at individual temperatures (0 °C, 30 °C, 60 °C, 90 °C), (b) Overlay of RCS spectra showing cumulative resonance shifts across all temperature levels, (c) Zoomed-in view at Res1 highlighting its frequency sensitivity to temperature.
Across all simulated temperatures, twelve distinct resonances are observed, one per T-shaped resonator, and each resonance varies predictably with temperature, enabling precise thermal discrimination over 0–90 °C. A dedicated frequency slot is maintained for each resonator (Res1–Res12) to span the full range without overlap. The resulting frequencies are summarized in Table 4.
Higher-frequency resonators exhibit slightly larger total tuning across 0–90 °C (≈ 158–164 MHz), corresponding to slopes of ≈ 1.75–1.82 MHz/°C. For example, Res1 shifts by ≈ 162 MHz (4.100 → 4.262 GHz), while Res12 shifts by 164 MHz (6.300 → 6.464 GHz). Even the smallest total shift (≈ 158 MHz, e.g., Res8) is clearly distinguishable in the spectra. Thus, each resonator provides a usable Δf span to encode temperature within its assigned band (lowest frequency ≈ 0 °C; highest ≈ 90 °C).
Throughout these scenarios, all active resonances maintain a high Q-factor and remain within their allocated bands, indicating that the alternating layout effectively mitigates coupling and prevents distortion of neighboring responses. These results demonstrate robust, reconfigurable performance for temperature identification within compact chipless RFID systems.
Humidity-sensing chipless tag performance
Humidity sensing in chipless RFID is achieved by coupling the resonator to moisture-responsive dielectrics. In our design, the base tag remains RO4003C (same substrate characteristics as in Sect. "T-shaped resonator structure overview"), while a Kapton HN film (125 μm) is laminated locally over the sensing resonator and over-coated with a thin polyvinyl alcohol (PVA) layer (~ 5–20 μm). Kapton HN provides mechanical robustness, chemical resistance, and low GHz loss (εr = 3.4), whereas PVA increases water uptake, amplifying the RH-induced change in effective permittivity. As RH rises, the effective εr increases, producing a downshift in resonant frequency and a small change in notch depth/Q. We quantify performance by the slope Δf/ΔRH and related RCS features.
Theoretical analysis of humidity sensing
In the stacked Kapton HN / RO4003C region, the dielectric properties vary with RH. The Kapton permittivity follows the empirical relation.
yielding εr ≈ 3.05 (0% RH) to ≈ 3.77 (90% RH), see Table 5.
For the Kapton HN / RO4003C bilayer, the homogenized relative permittivity is computed by the series-capacitor effective-medium approximation:
where H denotes layer thickness. As εr,Kapton increases with RH, εr,Roger increases accordingly. The effective permittivity seen by the microstrip is then computed using the same formulation as Eq. (8) (Sect. "Theoretical analysis of temperature sensing"), ensuring that εeff reflects the RH-dependent stack. Since f0 ∞ \(\frac{1}{\sqrt{{\varepsilon }_{eff}}}\), rising RH produces a downward shift in the resonant frequency.
12-resonator chipless RFID humidity-sensing tag: simulation study
The humidity sensor retains the 12-resonator tag structure and the same dimensions as in Sect. "12-resonator identification tag on RO4003C: electromagnetic simulation and performance evaluation", and its performance was simulated in CST Studio Suite. The tag is partitioned into one humidity-sensing resonator and eleven identification resonators. The sensing element (blue in Fig. 8) is implemented on the RO4003C base by laminating a local Kapton HN film (125 μm) over the resonator and applying a PVA hygroscopic over-layer (~ 5–20 μm) to enhance RH sensitivity; the remaining eleven resonators (black) provide identification. Resonators are dimensioned to maintain ~ 200 MHz slot spacing, reserving ~ 160 MHz per resonator to track RH-induced shifts without spectral overlap. The top and side views in Fig. 8 show the layout, layer stack, and labeling of the sensing and identification resonators. Humidity detection relies on dielectric modulation of the Kapton/PVA stack under moisture uptake: increasing RH raises the effective permittivity, producing a downshift in resonance frequency. This shift is read wirelessly via RCS interrogation, enabling a fully battery-free humidity-sensing capability.

Configuration of the proposed chipless humidity sensing structure.
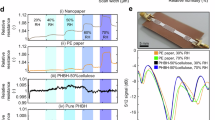
The performance of the humidity-sensing resonator was evaluated across varying levels of relative humidity (RH), and the results are presented in Fig. 9. At 0% RH, the dedicated sensing resonator exhibits a resonance at ≈ 4.10 GHz. As humidity increases to 90% RH, the resonance downshifts to ≈ 3.90 GHz, confirming the sensitivity of the Kapton HN/PVA overlay to environmental moisture. Intermediate steps show nearly linear behavior: 25 → 50% RH produces a ≈ 48 MHz downshift, while 50 → 75% RH induces a further ≈ 50 MHz shift. These variations are clearly visible in the RCS spectra of Fig. 9a, while Fig. 9b provides a zoomed view of the first resonator (Res1) to highlight the progressive frequency movement with humidity. The resonant notches maintain a high quality factor (Q-factor) across the full range, with RCS magnitudes between − 27 dBsm and − 35 dBsm, demonstrating that sensitivity is achieved without degrading spectral clarity. The eleven identification resonators, fabricated on the RH-insensitive RO4003C substrate, remain stable regardless of ambient humidity. As a result, the tag’s encoded identity remains unaffected, ensuring both environmental sensing and robust identification within the same platform.

(a) The simulated RCS magnitude of the proposed humidity sensor under relative humidity levels of 0, 25, 50, 75, and 90°; (b) Zoomed-in view at Res1 highlighting its frequency sensitivity to humidity.
Practical application in IoT-enabled smart agriculture: ML-integrated sensing and edge intelligence
The emergence of smart agriculture represents a paradigm shift from conventional crop management toward data-driven, autonomous, and sustainable practices. Continuous monitoring of temperature and humidity is essential for optimizing irrigation, predicting crop stress, and maintaining ideal greenhouse microclimates. However, achieving real-time sensing across vast rural regions requires low-cost, energy-autonomous, and scalable IoT architectures that can function even under intermittent network connectivity.
In this work, a hybrid chipless RFID + Machine Learning (ML) sensing framework is proposed as a foundation for battery-free, edge-intelligent IoT infrastructure. The system integrates high-Q T-shaped resonators fabricated on Taconic RF-35 for temperature and Kapton HN/PVA for humidity sensing. The dual-parameter design ensures reliable operation in diverse agricultural settings such as greenhouses, open-field plots, and soil–air interfaces.
Each resonator produces a unique radar-cross-section (RCS) response from which physics-driven features resonant frequency (f₀), notch depth, Q-factor, and sensitivities (Δf/ΔT, Δf/ΔRH)—are extracted. This feature-engineering approach, grounded in electromagnetic behavior, provides interpretability and lightweight computation compared with deep-learning pipelines that rely on high-dimensional spectral images.
Before feature extraction, RCS data undergo polynomial detrending and Savitzky–Golay smoothing to eliminate baseline drift while preserving notch sharpness. Domain augmentation simulates real-world radio conditions (± 5–10 MHz frequency jitter, ± 15% amplitude attenuation, multipath distortion) to improve generalization under noisy rural channels. The resulting dataset (4–6.5 GHz band) supports both classification and regression-based ML models optimized for edge inference.
Machine learning for temperature sensing using classification and regression models
To ensure accurate and reliable chipless RFID temperature sensing under noisy electromagnetic conditions, machine learning (ML) was integrated into the sensing and decoding pipeline. The objective was to enable autonomous, calibration-free interpretation of spectral data, even in environments affected by 5G, Wi-Fi, and industrial IoT interference a scenario common in large-scale smart-agriculture networks. The experimental dataset was generated from simulated radar cross-section (RCS) responses of a 12-resonator chipless RFID tag composed of high-Q T-shaped resonators fabricated on Taconic RF-35, whose permittivity exhibits a measurable dependence on temperature. The frequency response between 4 GHz and 6.5 GHz captured these thermally induced resonance shifts, forming the basis for the ML-based inference. To emulate real-world agricultural conditions, the simulated spectra were augmented with random frequency jitter (± 5–10 MHz) and amplitude attenuation (± 15%), reproducing the effects of multipath propagation, antenna misalignment, and hardware drift. Pre-processing included polynomial baseline correction and Savitzky–Golay smoothing to suppress low-frequency noise while preserving notch sharpness. From each resonator, physically interpretable features were extracted—resonant frequency (f₀), notch depth (dBsm), Q-factor, and the sensitivity parameter Δf / ΔT—along with cross-resonator coupling terms that capture spectral interaction effects. These descriptors were normalized to zero mean and unit variance to ensure balanced learning.
The resulting balanced dataset of 1 000 samples, spanning ten discrete temperature levels from 0 °C to 90 °C in 10 °C increments, was divided using a 70 / 10 / 20 split for training, validation, and testing, combined with five-fold cross-validation to ensure statistical robustness. Two complementary ML approaches were trained to extract both categorical and continuous temperature information: a Random Forest (RF) classifier to assign temperature classes and a Support Vector Regression (SVR) model to predict the exact value. The RF algorithm, tuned with 200 estimators and a maximum depth of 12, achieved 96.2% classification accuracy, as illustrated in Fig. 10a, with strong diagonal dominance and only minor confusion between adjacent bins. The SVR model, implemented with a radial-basis-function (RBF) kernel and parameters C = 10 and ε = 0.1, produced a mean absolute error (MAE) of 1.4 °C and a coefficient of determination R2 = 0.997, indicating near-perfect linear correlation between predicted and actual temperatures as shown in Fig. 10b.

(a) Normalized confusion matrix for Random Forest classification from 0 °C to 90 °C (10 °C bins), (b) SVR-predicted versus actual temperature values (MAE = 1.4 °C, R2 = 0.997).
Even when exposed to higher synthetic noise levels (± 10 MHz spectral jitter), both models maintained above 90% accuracy, demonstrating resilience to channel distortion and multipath effects. These results confirm that physics-guided ML descriptors—rooted in resonance behavior rather than raw spectral images enhance interpretability, reduce computational load, and deliver noise-tolerant temperature estimation. Moreover, the trained models operate with < 10 ms inference latency on low-power edge gateways, validating their suitability for field deployment in IoT-enabled smart agriculture. In practice, such edge-embedded intelligence enables real-time thermal mapping for precision irrigation, soil microclimate tracking, and greenhouse temperature control, providing a foundation for battery-free, maintenance-free environmental monitoring that unites robust RFID hardware with adaptive ML analytics.
Machine learning for humidity sensing using clustering-enhanced gradient boosting models
Accurate humidity estimation in chipless RFID sensing is particularly challenging because environmental moisture affects both dielectric and scattering properties of the sensing substrate, often in subtle, nonlinear ways. To address this, a hybrid machine learning framework was developed, combining unsupervised clustering with supervised gradient boosting to enhance discrimination under real-world noise and interference conditions. The dataset, similar to the temperature study, was generated from simulated radar cross-section (RCS) spectra of humidity-sensitive chipless RFID tags, where the sensing layer comprised a Kapton HN substrate coated with polyvinyl alcohol (PVA). The dielectric permittivity of this multilayer structure varies with absorbed water molecules, shifting the resonant frequencies and broadening the notches within the 4–6.5 GHz band. To emulate realistic smart-agriculture environments, the simulated spectra were perturbed with multipath-like distortions, amplitude variations up to ± 15%, and frequency jitter (± 10 MHz), representing fluctuating field conditions, antenna tilt, and surface moisture accumulation. A balanced dataset of 900 samples was constructed, covering relative humidity (RH) levels from 0 to 90% in 10% increments, with 100 samples per class. The dataset was split using a 70/10/20 ratio for training, validation, and testing, and all reported results were averaged over five-fold cross-validation to ensure statistical reliability and reproducibility.
Feature extraction targeted the physics of the humidity-sensitive resonator. For each spectral response, the resonant frequency shift, bandwidth broadening, and Q-factor reduction were calculated as primary features. These features reflect the increased dielectric losses and reduced energy confinement caused by moisture absorption. Before training, the features were standardized and transformed using Principal Component Analysis (PCA) to reduce redundancy while retaining the most informative components. To further improve robustness, a k-means clustering stage was introduced before supervised training. This clustering separated the data into noise-aware subsets representing distinct RF conditions (e.g., open-field, indoor, or industrial interference), allowing the downstream classifier to learn context-specific patterns and improve generalization. For classification, an XGBoost ensemble model was implemented with 300 estimators, maximum depth = 8, and learning rate = 0.05, using a subsample ratio of 0.8 to prevent overfitting. For regression, a Gradient Boosting Regressor (GBR) was trained with 200 estimators and identical hyperparameters. Both models were trained using mini-batches of 32 samples and optimized using grid search over validation folds. The XGBoost classifier exhibited strong performance, achieving 94.5% overall accuracy with precision and recall above 0.90 at low (0% RH) and high (90% RH) extremes, as illustrated in Fig. 11a. These regions correspond to strong permittivity contrasts where resonant frequency shifts are large and easily separable. Conversely, performance declined around 50% RH, where overlapping notch positions and weaker dielectric gradients caused increased confusion, reflected by lower recall (0.36) and F1-score (0.47).

(a) XGBoost classification metrics for discrete humidity levels from 0 to 90% RH, (b) Residual plot for Gradient Boosting regression illustrating that most prediction errors lie within ± 10% RH with MAE = ± 2.1% RH.
The regression counterpart (Fig. 11b) demonstrated high consistency between predicted and actual humidity values, achieving a mean absolute error (MAE) of ± 2.1% RH. Most residuals fell within a ± 10% RH tolerance band, validating the suitability of the model for practical monitoring. Larger deviations, occasionally up to ± 20% RH, were confined to mid-range humidity, where signal overlap and environmental noise introduce ambiguity in the extracted features. Nevertheless, the hybrid approach—combining unsupervised noise separation with supervised learning—proved remarkably stable, maintaining high accuracy even when signal amplitudes were degraded by up to ± 15%.
These findings confirm that the proposed clustering-enhanced gradient boosting framework is well-suited for real-world agricultural sensing, where humidity data are inherently noisy and field conditions unpredictable. The physics-guided feature set not only reduces model complexity but also ensures interpretability, linking each learned pattern to measurable dielectric behavior of the PVA-Kapton resonator. Deployed at the edge, such models enable precise humidity tracking for greenhouse ventilation control, irrigation optimization, and disease prevention, making them an essential building block in IoT-enabled precision farming infrastructures that demand both accuracy and energy efficiency.
Comparative evaluation of machine learning models for environmental sensing
To assess the relative performance of different learning paradigms in chipless RFID-based environmental monitoring, a comparative analysis of all trained models was conducted, focusing on three key dimensions: predictive accuracy, computational efficiency, and noise resilience. These criteria are particularly relevant to IoT-enabled smart-agriculture deployments, where computational resources are limited, and environmental noise stemming from 5G, Wi-Fi, and multipath reflections can distort sensor responses. All models were optimized via grid search and evaluated using balanced datasets of radar cross-section (RCS) spectra obtained from the proposed multi-resonator tag. Reported results represent averages across five-fold cross-validation, with a dedicated validation subset (10%) used for hyperparameter tuning to prevent bias.
For temperature classification, the Random Forest (RF) model demonstrated the best trade-off between accuracy and computational cost, achieving 96.2% accuracy with precision = 0.96, recall = 0.95, and F1 = 0.96, while training in 3.4 s. The model remained stable under ± 10 MHz frequency jitter, maintaining performance within ± 5% of the baseline. These results confirm that ensemble decision trees are highly suited for real-time thermal monitoring, especially at the edge layer, where inference speed and memory efficiency are paramount. The Support Vector Regression (SVR) model, using a radial-basis-function kernel, achieved ± 1.3 °C mean absolute error (MAE) and remained robust under ± 8 MHz jitter. Although training required 8.1 s, its smooth, continuous temperature estimation makes it particularly useful for fine-grained thermal mapping, such as greenhouse microclimate modeling or soil–air temperature gradient analysis.
For humidity estimation, the XGBoost classifier achieved 94.5% accuracy (precision = 0.95, recall = 0.94, F1 = 0.95), completing training in just 2.8 s. Its gradient-based boosting architecture effectively captured nonlinear dielectric variations of the PVA-Kapton sensing layer while preserving fast convergence and low memory footprint an essential characteristic for lightweight edge inference. For continuous humidity regression, the Gradient Boosting Regressor (GBR) achieved ± 2.1% RH MAE, training in 5.6 s, and exhibited tolerance to ± 12% RH variation. This robustness to signal attenuation ensures reliable performance even in partially occluded or moisture-saturated agricultural environments.
Finally, an unsupervised supervised hybrid model combining k-means clustering with XGBoost was employed for anomaly detection and spectral drift identification. This approach achieved an area under the curve (AUC) of 98%, with precision = 0.97, recall = 0.98, and F1 = 0.98, learning subtle deviations in spectral features caused by detuned resonators, environmental noise, or multi-tag interference. Training required only 4.2 s, while resilience extended up to ± 20 MHz equivalent spectral jitter, highlighting its potential for self-diagnostic operation in dense, multi-sensor deployments typical of precision farming.
Table 6 summarizes these comparative results. The findings reveal that ensemble tree models (RF, XGBoost, GBR) outperform kernel-based regression in terms of inference speed and noise tolerance, whereas SVR offers superior precision for continuous estimation at the expense of higher training cost. Overall, the models collectively form a complementary hierarchy: RF and XGBoost for classification at the edge, SVR and GBR for fine-resolution regression, and k-means + XGBoost for system health monitoring. This synergy allows dynamic resource allocation across IoT layers from low-latency local inference to cloud-based analytics depending on energy availability and application needs.
To ensure robustness beyond simulation, domain-adaptation techniques were incorporated, including controlled frequency jitter, amplitude attenuation, and multipath distortions, replicating real-world radio environments. Importantly, the anechoic-chamber measurements of the 12-resonator identification tag (Sect. "12-resonator identification tag on RO4003C: electromagnetic simulation and performance evaluation") closely matched the simulated RCS behavior, validating the fidelity of the electromagnetic (EM) model used for dataset synthesis. Future work will extend this verification to the temperature- and humidity-sensitive variants, integrating both measured and simulated data to form hybrid datasets that enable domain transfer from laboratory to field conditions. This will further enhance the system’s generalization and ensure consistent performance across heterogeneous agricultural environments.
State-of-the-art comparison and deployment discussion
Most reported chipless RFID systems focus on either identification or single-parameter sensing, often with limited encoding capacity or validation under simplified conditions. While such approaches are effective as proof-of-concept demonstrations, their scalability is constrained in real deployments by spectral coupling, multipath propagation, and reader-induced distortions. The proposed work addresses these challenges by integrating 12-resonator dual-parameter sensing architecture (temperature + humidity) within a compact 45 × 25 mm2 footprint. High encoding density is achieved while preserving spectral clarity through controlled resonance spacing of approximately 100–200 MHz, thereby reducing inter-resonator coupling and improving decoding robustness.
Scalable deployment further requires reliable multi-tag operation. To this end, the tag layout and placement strategy are optimized to preserve high-Q resonances and introduce guard-band spacing that limits spectral overlap. The associated ML pipeline was evaluated under synthetic distortions emulating realistic multi-tag interference and RF impairments, with classification accuracy for both temperature and humidity remaining above 90% even under moderate overlap. At larger network scales, additional reliability can be achieved through frequency-slot planning or reader time-division multiplexing, approaches that remain compatible with low-power IoT backhaul technologies such as LoRa and NB-IoT.
Within this deployment context, Table 7 provides a unified comparison that positions the proposed platform against both recent chipless RFID + ML studies and representative passive sensing technologies. Prior chipless RFID + ML works have advanced elements such as realistic dataset acquisition, orientation tolerance, multi-tag identification, and coupling-aware encoding, but generally remain constrained to identification-only operation, single-parameter sensing, or offline processing. Examples include robotic dataset-driven capacitance sensing37, orientation-robust identification40, multi-tag identification without sensing54, simulation-based ID–sensing integration55, and coupling-aware encoding optimization without environmental sensing56. To enable quantitative cross-technology comparison, Table 7 further incorporates passive sensing benchmarks and reports their performance through a dedicated “Sensor sensitivity / metric” column, including crack-width sensing with MHz/mm sensitivity17, chipless humidity sensing expressed in MHz/%RH22, passive resonant temperature sensing benchmarks25, battery-free RFID sensing deployments evaluated using error-based metrics34, and humidity-dependent material models supporting dielectric-based sensing layers51.
Building on this comparison, the proposed system advances the state of the art by unifying high-capacity identification, dual-parameter environmental sensing, and edge–cloud intelligence within a single, experimentally verified architecture. The temperature-sensitive resonators exhibit tuning slopes of approximately 1.75–1.82 MHz/°C, while the humidity-sensitive resonator shows an overall frequency shift of about 200 MHz over 0–90% RH (≈ 2.22 MHz/%RH). These physical sensitivities are translated into robust end-to-end performance through a physics-guided ML framework (RF/SVR/XGBoost/k-means), achieving ± 1.3 °C MAE, ± 2.1% RH MAE, and over 96% classification accuracy under domain-augmented noise conditions. By combining dual-parameter sensing, high-capacity chipless identification, multi-tag readiness, and edge-ready intelligence within a battery-free platform, the proposed system provides a practical pathway from laboratory prototypes to scalable IoT deployments for smart-agriculture and environmental monitoring.
Edge–cloud intelligence, energy optimization, and digital-twin farm control
The defining strength of the proposed system lies not only in sensing precision but also in its ability to operate as a self-reliant cyber–physical intelligence layer for IoT-enabled smart agriculture. By combining edge computation, cloud coordination, and energy-aware operation into a unified feedback loop, the architecture enables autonomous decision-making even under intermittent connectivity. As illustrated in Fig. 12, the system follows a three-tier pipeline: (i) Tier 1—passive chipless RFID tags for identification and microclimate sensing, (ii) Tier 2—edge gateways for feature extraction and low-latency machine-learning (ML) inference, and (iii) Tier 3—cloud/serverless analytics hosting digital-twin models and decision logic. Upstream links carry sensed data and inference summaries, while downstream links deliver control commands and model updates.

Integrated three-tier architecture for passive chipless RFID temperature/humidity sensing with edge ML inference, store-and-forward buffering, serverless cloud analytics, and digital-twin farm control.
Tier 1—Battery-free identification and sensing. At the physical layer, each chipless RFID tag acts as a passive transducer. Identity and environmental information are encoded in the tag’s radar cross-section (RCS) spectrum through high-Q resonance notches whose frequencies shift with temperature and humidity. Because the tags are powered solely by the reader’s incident electromagnetic field, they require no battery or onboard electronics, supporting dense and maintenance-free deployment across fields, irrigation assets, and greenhouse infrastructure.
Tier 2—Edge intelligence and bandwidth reduction. The backscattered spectra are captured by nearby readers/gateways that form the intermediate intelligence layer. Unlike conventional readers that forward raw measurements, the proposed gateways perform on-device feature extraction and lightweight ML inference (Random Forest, SVR, and XGBoost). The gateway outputs compact summaries—estimated \(T\), \(RH\), confidence/uncertainty, and anomaly flags—rather than transmitting full spectra, which reduces uplink traffic and improves responsiveness for time-critical actions such as irrigation and ventilation. A store-and-forward buffer (Fig. 12) preserves continuity under network outages by caching results and synchronizing once connectivity is restored. Energy-aware operation at the gateway can be supported by practical optimizations such as processing only resonance regions of interest (ROIs), feature quantization, limiting ensemble depth for fast inference, and duty-cycling interrogations to match the required sampling rate.
Tier 3—Serverless analytics and a quantitative digital-twin crop model. At the cloud layer, aggregated inference streams from multiple gateways are fused into a spatiotemporal microclimate view and ingested by a digital-twin crop model. To make this coupling quantitative, the sensed air temperature \(T\)(°C) and relative humidity \(RH\)(%) are converted into vapor-pressure variables that directly drive standard agronomic models. The saturation vapor pressure and actual vapor pressure (kPa) are computed as:
and the vapor-pressure deficit is:
These terms enter the57 Penman–Monteith reference evapotranspiration formulation:
Here, \({R}_{n}\) is net radiation, \(G\) is soil heat flux, \({u}_{2}\) is wind speed at 2 m height, \(\Delta\) is the slope of the saturation vapor-pressure curve, and \(\gamma\) is the psychrometric constant. In practice, \({R}_{n}\), \({u}_{2}\), and \(G\) can be obtained from a low-cost weather station or remote-sensing products, while \(T\) and \(RH\) are continuously supplied by the proposed chipless tags. The digital twin then supports irrigation scheduling through crop evapotranspiration, for example \(E{T}_{c}={K}_{c}\text{\hspace{0.17em}}E{T}_{0}\), and issues downstream actuation commands (valves/vents/pumps) via the edge layer, forming a closed-loop sensing–decision–actuation pipeline (Fig. 12).
Example: for \(T={30}^{\circ }\text{C}\) and \(RH=40\text{\%}\), \({e}_{s}=4.24\) kPa and \({e}_{a}=1.70\) kPa, yielding \(VPD=2.55\) kPa. These derived variables update \(E{T}_{0}\) and downstream irrigation control within the digital twin.
IoD extension for intermittent connectivity. To enhance coverage in remote or sparsely connected regions, an Internet-of-Drones (IoD) layer can complement fixed infrastructure (Fig. 12). UAV-mounted readers periodically interrogate tag clusters and act as mobile data mules, synchronizing buffered edge outputs with the cloud when terrestrial links are unavailable.
Reliability and interpretability. Reliability can be reinforced through uncertainty-aware inference (confidence scoring) and interpretable, physics-guided features (e.g., resonance shifts and Q-factor changes). Confidence thresholds can gate automatic actuation, while low-confidence outputs trigger re-interrogation or buffering, improving operational safety under real-world RF variability.
By integrating passive chipless sensing (Tier 1), edge ML inference with buffering (Tier 2), and serverless digital-twin analytics with bidirectional control (Tier 3), the proposed system provides a scalable and battery-free framework for precision agriculture. It enables low-latency, bandwidth-efficient monitoring and actionable decision support that bridges the physical farm and its virtual digital twin.
Conclusion and future work
This study presented a unified framework for the design, simulation, and intelligent interpretation of a compact, high-performance chipless RFID tag engineered for the Internet of Things (IoT). By employing multiple T-shaped resonators on a Rogers RO4003C substrate, the proposed 24-resonator identification tag achieved excellent Q-factor, spectral clarity, and dense encoding capacity. Experimental validation in an anechoic chamber confirmed the electromagnetic fidelity of the simulated model, bridging the gap between theoretical design and physical realization. Beyond identification, the platform was extended into a 12-resonator dual-parameter environmental sensing variant, integrating Taconic RF-35 for temperature monitoring and a Kapton HN/PVA bilayer for humidity detection. These materials–resonator co-design demonstrated, for the first time, the feasibility of combining large-scale identification with multi-parameter sensing in a single, fully passive, and battery-free tag. To address the challenges of spectral interference, environmental noise, and limited sensing datasets, a physics-guided machine learning (ML) framework was developed. Simulated radar cross-section (RCS) spectra were augmented with realistic perturbations frequency jitter, amplitude attenuation, and multipath distortion to emulate deployment conditions and enhance model generalization. Using this hybrid approach, the Random Forest classifier achieved 96.2% temperature classification accuracy, the Support Vector Regression (SVR) model yielded ± 1.3 °C mean absolute error for continuous estimation, the Gradient Boosting Regressor attained ± 2.1% RH humidity error, and the k-means + XGBoost anomaly detector exceeded 98% AUC. Unlike conventional CNN- or SVM-only architectures, the proposed ML pipeline emphasizes feature-level interpretability, computational efficiency, and resilience to noisy smart-agriculture and smart-city environments, making it a strong candidate for scalable, maintenance-free IoT deployment. The proposed platform simultaneously demonstrates the integration of a 24-bit high-capacity identification tag with a 12-resonator dual-parameter sensing variant within a unified architecture, validates the electromagnetic model through experimental measurement of the 24-resonator tag, and achieves competitive ML-based decoding accuracy for dual-parameter sensing under realistic noise and multipath interference. These combined outcomes position chipless RFID as a sustainable alternative to silicon-based sensor nodes, offering durability, low cost, and eco-friendly scalability for large-scale IoT infrastructures.
Future work will prioritize experimental validation of the temperature- and humidity-sensing performance and the associated ML decoding results. Dedicated prototypes of the Taconic RF-35 temperature tag and the Kapton HN/PVA humidity tag will be fabricated and characterized using RCS measurements under controlled climatic conditions (temperature and RH) and controlled electromagnetic conditions (anechoic/low-multipath setup). These measurements will be used to (i) verify sensitivity metrics (Δf/ΔT and Δf/ΔRH), (ii) benchmark the ML models on real sensor data, and (iii) build hybrid measured–simulated datasets to improve domain transfer and generalization through domain-adaptation techniques. Following controlled-lab validation, extended field trials will be conducted in deployment-realistic agricultural environments to assess long-term stability, multi-tag interference, reader–tag distance/orientation effects, and non-planar mounting under weather-driven perturbations. Finally, the platform will be extended to additional parameters (e.g., soil salinity/moisture, air-quality indicators, radiation, and structural stress), broadening applicability to smart farming and infrastructure monitoring within autonomous, battery-free IoT ecosystems.
Data availability
The datasets generated and/or analyzed during the current study are available from the corresponding author upon reasonable request.
References
Xie, Q. & Xie, Q. Security analysis on a three-factor authentication scheme of 5G wireless sensor networks for IoT system. IEEE Internet Things J. 11(8), 15038–15042 (2024).
Mowla, M. N., Mowla, N., Shah, A. F. M. S., Rabie, K. M. & Shongwe, T. Internet of things and wireless sensor networks for smart agriculture applications: A survey. IEEE Access 11, 145813–145852 (2023).
Sokol, M., Galajda, P., Jurik, P., Pribula, F. & Sokolova, Z. Design and implementation of a wireless sensor network based on the ESP32 for IoT applications. In 2024 International Symposium ELMAR, 69–73, (Zadar, Croatia, 2024).
Chaabane, N., Mahfoudhi, S. & Belkadhi, K. Interpolation-based IoT sensors selection. IEEE Sens. J. 24(21), 36143–36147 (2024).
Rustemi, A. & Dalipi, F. Synergizing IoT, AI, and blockchain for smart agriculture: Challenges, opportunities, and future directions. Internet of Things 34, 101778 (2025).
Najim, A. & Kurnaz, S. Study of integration of wireless sensor network and Internet of Things (IoT), Wireless Personal Communications, 2023.
Mekki, K., Necibi, O., Boussetta, C. & Gharsallah, A. Miniaturization of circularly polarized patch antenna for RFID reader applications. Eng. Technol. Appl. Sci. Res. 10(3), 5655–5659 (2020).
Mekki, K., Necibi, O., Boulejfen, N., Larguech, S. & Gharsallah, A. Precision identification in Internet of Things systems: The design of a chipless RFID tag with 12 bits of data, In 2023 22nd Mediterranean Microwave Symposium (MMS), 1–4 (Sousse, Tunisia, 2023).
Tavanti, E., Nepa, P., Gabbrielli, R. & Pirozzi, M. Review on systems combining computer vision and radio frequency identification. IEEE Internet Things J. 12(2), 1291–1319 (2025).
Mekki, K. et al. A UHF/UWB monopole antenna design process integrated in an RFID reader board. J. Electromagnetic Eng. Sci. 22(4), 479–487 (2022).
Jain, P. et al. Ultra-thin metamaterial perfect absorbers for single/dual/multi-band microwave applications. IET Microwaves, Antennas Propagation 14(5), 390–396 (2020).
Mengue, P. et al. Magnetic SAW RFID sensor based on love wave for detection of magnetic field and temperature. IEEE J. Radio Freq. Identif. 7, 528–535 (2023).
Kamal, B. et al. Microwave-enabled chipless sensor for real-time non-contact water-cut measurements. Measurement 228, 114314 (2024).
Kavinesh, R. et al. Design of A 20-Bit chipless RFID tag utilizing multiple resonators in UWB frequency range. J. Adv. Res. Appl. Sci. Eng. Technol. 29(2), 25–37 (2023).
Prabavathi, P. & Rani, S. Modified microstrip transmission line based chipless RFID tag with high bit encoding. Measurement 190, 110684 (2022).
Ferdousmou, J. et al. IoT-enabled RFID in supply chain management: A comprehensive survey and future directions. J. Comput. Commun. 12(11), 207–223 (2024).
Wang, B. et al. Passive RFID sensor design and research for metal crack width detection. Results Eng. 26, 105637 (2025).
Choudhury, S., Costa, F., Manara, G. & Genovesi, S. 3-D chipless RFID tag for anti-counterfeiting applications. IEEE Open J. Antennas Propagation 5(6), 1681–1690 (2024).
Miao, F. et al. Integrated sensor for humidity, temperature, light, and carbon dioxide based on passive RFID. Sens. Actuators, B Chem. 390, 133993 (2023).
Mekki, K., Necibi, O., Dinis, H., Mendes, P. & Gharsallah, A. Investigation on the chipless RFID tag with a UWB pulse using a UWB IR-based reader. Int. J. Microw. Wirel. Technol. 14(2), 166–175 (2022).
Mulloni, V. et al. Applications of chipless RFID humidity sensors to smart packaging solutions. Sensors 24(9), 2879 (2024).
Junho, Y., Jong-Ig, L. & Younghwan, K. Humidity-sensing chipless RFID tag with enhanced sensitivity using an interdigital capacitor structure. Sensors 21(19), 6550 (2021).
Meng, S. et al. A sensitive paper-based chipless RFID sensor for humidity measurement at 2.45 GHz. Sens. Actuators, B Chem. 441, 100221 (2025).
Gao, P. et al. A super-low-cost and ultra-localized hotspots temperature sensor with GO-PDMS-AuNPs stacked material on the tip of single-mode fiber. Measurement 253, 117475 (2025).
Benjamin, K., Nikolas, B. & Mahmoud, W. Large-area conductor-loaded PDMS flexible composites for wireless and chipless electromagnetic multiplexed temperature sensors. Adv. Sci. 12, 2412066 (2025).
Bo, W. et al. Toward chipless RFID sensor for metal surface cracks detection. Sens. Rev. 44(6), 696–703 (2024).
Ahmadihaji, A., Izquierdo, R. & Shih, A. From chip-based to chipless RFID sensors: a review. IEEE Sens. J. 23(11), 11356–11373 (2023).
Karami-Horestani, A., Paredes, F. & Martín, F. Hybrid time/phase/frequency domain linear electromagnetic encoders for displacement sensing and near-field chipless-RFID. IEEE J. Radio Frequency Identif. 8, 134–144 (2024).
Mekki, K., Necibi, O., Mendes, P. & Gharsallah, A. Improving chipless RFID performance in 5G networks with UWB-IR backscatter analysis. In 2023 22nd Mediterranean Microwave Symposium (MMS), 1–4 (Sousse, Tunisia, 2023).
Su, C., Wang, X., Zou, C., Jiao, L. & Tao, Y. An innovative method based on wavelet analysis for chipless RFID tag detection. Electronics 13(12), 2375 (2024).
Mekki, K., Necibi, O., Dinis, H., Mendes, P. & Gharsallah, A. Backscatter analysis in UWB chipless RFID based on UWB-IR, In Proc. IEEE Texas Symp. Wireless Microw. Circuits Syst. (WMCS), 1–5 (May 2021).
Mekki, K., Omrane, N., Hugo, D., Paulo, M. & Ali, G. Frequency-spectra-based high coding capacity chipless RFID using an UWB-IR approach. Sensors 21(7), 2525 (2021).
Xiang, J. et al. Prospective RFID sensors for the IoT healthcare system. J. Sens. 2022(1), 8787275 (2022).
Wang, J., Chang, L., Aggarwal, S., Abari, O. & Keshav, S. Sustainable and low-cost greenhouse soil moisture monitoring using battery-free RFID sensors. ACM Trans. Sens. Netw. 21(2), 1–28 (2025).
Lasantha, L., Karmakar, N. C. & Ray, B. Chipless RFID sensors for IoT sensing and potential applications in underground mining—a review. IEEE Sens. J. 23(9), 9033–9048 (2023).
Amorim, R., Siragusa, R., Barbot, N. & Perret, E. Chipless image-based system for spatial-frequency data encoding. IEEE Trans. Antennas Propag. 72(1), 693–706 (2024).
Rather, N., Simorangkir, R. B. V. B., Buckley, J. L., O’Flynn, B. & Tedesco, S. Deep-learning-assisted robust detection techniques for a chipless RFID sensor tag. IEEE Trans. Instrum. Meas. 73, 1–10 (2024).
Neffati, S., Mekki, K. & Machhout, M. Deep learning-based CAD system for Alzheimer’s diagnosis using deep downsized KPLS. Sci. Rep. 15(1), 18556 (2025).
Mekki, K., Neffati, S., Ghezaiel, N., Rmili, H. & Gharsallah, A. Machine-learning-enhanced chipless RFID tag localization using UWB-IR backscatter analysis for IoT applications. IEEE Internet Things J. 12(18), 38723–38735 (2025).
Thomas, A., Sylaja, M. & Kurian, J. Refinement of chipless RFID tags across multiple positions for improved recognition reliability through machine learning techniques, Progress Electromagnetics Res. 150, 2024.
Neffati, S., Abdellafou, K., Taouali, O. & Bouzrara, K. Enhanced SVM-KPCA method for brain MR image classification. Comput. J. 63(3), 383–394 (2019).
Neffati, S., Abdellafou, K., Taouali, O. & Bouzrara, K. An enhanced CAD system based on machine learning algorithm for brain MRI classification. J. Intell. Fuzzy Syst. 41(1), 1845–1854 (2021).
Lai, F.-P. & Chen, Y.-S. A broadband dual-polarized antenna with pattern reconfigurability for multi-tag detection in chipless RFID. IEEE Trans. Antennas Propagation 73, 6008–6013 (2025).
Huang, H. et al. In-sensor compressing via programmable optoelectronic sensors based on van der Waals heterostructures for intelligent machine vision. Nat. Commun. 16(1), 3836 (2025).
Mekki, K. et al. Development of a new 24-bit high-performance chipless RFID tag for accurate identification in IoT systems. IEEE Access 11, 140943–140957 (2023).
Mekki, K., Necibi, O., El May, W., Rabaani, K. & Gharsallah, A. Design of a UHF / UWB monopole antenna integrated in an RFID reader board. In 2021 IEEE 19th International Symposium on Antenna Technology and Applied Electromagnetics (ANTEM), 1–2 (Winnipeg, MB, Canada, 2021).
Mekki, K., Necibi, O. & Gharsallah, A. Design of a miniaturized dipole RFID tag antenna. Indian J. Sci. Technol. 13(30), 3103–3112 (2020).
Yang, C., Shen, W. & Wang, X. Applications of Internet of Things in manufacturing. In Proc. IEEE 20th Int. Conf. Comput. Supported Cooperat. Work Design (CSCWD), 670–675 (May 2016).
Bouzidi, A. & Aguili, T. RCS prediction from planar near-field measurements. Prog. Electromagn. Res. M 22, 41–55 (2012).
Anam, H., Habib, A., Jafri, S. I., Amin, Y. & Tenhunen, H. Directly printable frequency signatured chipless RFID tag for IoT applications. Radioengineering 26(1), 139–146 (2017).
Nadeem, M., Habib, A. & Umair, M. Chipless RFID based multi-sensor tag for printed electronics. Heliyon 10(4), e26494 (2024).
Requena, F., Barbot, N., Kaddour, D. & Perret, E. Combined temperature and humidity chipless RFID sensor. IEEE Sens. J. 22(16), 16098–16110 (2022).
Roy, A. A., Môm, J. M. & Kureve, D. T. Effect of dielectric constant on the design of rectangular microstrip antenna. In 2013 IEEE International Conference on Emerging & Sustainable Technologies for Power & ICT in a Developing Society (NIGERCON), 111–115 (Owerri, Nigeria, 2013).
Fodop Sokoudjou, J. J. et al. Chipless RFID tag implementation and machine-learning workflow for robust identification. IEEE Trans. Microwave Theory Tech. 71(12), 5147–5159 (2023).
Rather, N., Simorangkir, R. B. V. B., Buckley, J., O’Flynn, B. & Tedesco, S. Evaluation of machine learning models for a chipless RFID sensor tag. In 2023 17th European Conference on Antennas and Propagation (EuCAP), 1–5 (Florence, Italy, 2023).
Zhao, Y., Genovesi, S., Jiang, T., Manara, G. & Costa, F. High-capacity chipless RFID system enabled by machine learning predictive models. IEEE Internet Things J. 12(14), 26514–26522 (2025).
Allen, R. G., Pereira, L. S., Raes, D. & Smith, M. Crop evapotranspiration—Guidelines for computing crop water requirements, 2nd ed., FAO Irrigation and Drainage Paper 56, FAO, Rome, Italy, 2025.
Acknowledgements
This research was funded by the Scientific Research Deanship at the University of Ha’il, Saudi Arabia, through project number “RG-24 110”.
Author information
Authors and Affiliations
Contributions
K.M. and S.N. designed and implemented the proposed chipless RFID sensor system. N.G. and M.B.S. developed and validated the machine learning and edge IoT framework. H.R. and A.G supervised the entire project, contributed to the interpretation of results, and reviewed the overall design. K.M. and S.N. wrote the main manuscript text and prepared all figures. All authors reviewed and approved the final manuscript.
Corresponding author
Ethics declarations
Competing interests
The authors declare no competing interests.
Additional information
Publisher’s note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
Open Access This article is licensed under a Creative Commons Attribution-NonCommercial-NoDerivatives 4.0 International License, which permits any non-commercial use, sharing, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons licence, and indicate if you modified the licensed material. You do not have permission under this licence to share adapted material derived from this article or parts of it. The images or other third party material in this article are included in the article’s Creative Commons licence, unless indicated otherwise in a credit line to the material. If material is not included in the article’s Creative Commons licence and your intended use is not permitted by statutory regulation or exceeds the permitted use, you will need to obtain permission directly from the copyright holder. To view a copy of this licence, visit http://creativecommons.org/licenses/by-nc-nd/4.0/.
About this article

Cite this article
Mekki, K., Ghezaiel, N., Slimene, M.B. et al. Edge machine learning over IoT for chipless RFID environmental sensing in smart agriculture. Sci Rep 16, 9512 (2026). https://doi.org/10.1038/s41598-026-38742-x
Received:
Accepted:
Published:
Version of record:
DOI: https://doi.org/10.1038/s41598-026-38742-x
