
Abstract
The role of the cerebral cortex in self-initiated versus sensory-driven movements is central to understanding volitional action. Whether the differences in these two movement classes are due to specific cortical areas versus more cortex-wide engagement is debated. Using wide-field Ca2+ imaging, we compared neural dynamics during spontaneous and motorized treadmill locomotion, determining the similarities and differences in cortex-wide activation and functional connectivity (FC). During motorized locomotion, the cortex exhibits greater activation globally prior to and during locomotion starting compared to spontaneous and less during steady-state walking, during stopping, and after termination. Both conditions are characterized by FC increases in anterior secondary motor cortex (M2) nodes and decreases in all other regions. There are also cortex-wide differences; most notably, M2 decreases in FC with all other nodes during motorized stopping and after termination. Therefore, both internally- and externally-generated movements widely engage the cortex, with differences represented in cortex-wide activation and FC patterns.
Similar content being viewed by others


Introduction
Externally-driven movements are movements directed by an outside stimulus, such as an external sensory cue. Internally-driven movements are, instead, self-directed or self-determined by the actor. Externally- and internally-driven movements are thought to utilize different cerebral cortical mechanisms. Functional imaging and electrophysiological studies in human and non-human primates have found support for several mesial premotor areas in internally-driven movements, with the supplementary motor area (SMA) and pre-SMA as the critical structures1,2,3,4,5. Since its initial demonstration6, the readiness potential in the medial frontal cortex has been implicated in volitional action (for reviews see in refs. 7,8). Neuronal recordings in the pre-SMA and SMA in humans2 and non-human primates4,5 further implicate these frontal regions in volition movement, as do SMA lesion studies9,10. Conversely, the dorsal steam, with input from sensory areas to the posterior parietal cortex and its projections to the premotor cortex, has been hypothesized to transform sensory inputs into motor commands11,12,13,14. Posterior partial and premotor cortex neurons are strongly modulated in the planning of cued movements15,16,17,18. These widely hypothesized and supported views frame the question of internally versus externally generated movements as primarily implemented by specific cortical regions.
An alternate viewpoint is that internally- and externally- movements engage the cortex widely, with the underlying differences in the patterns of activation and interaction among multiple cortical regions19,20,21. Imaging and electrophysiological studies in both humans and non-human primates support the view that externally-generated movements engage the pre-SMA and SMA, as well as the pre-motor cortex and posterior parietal cortex20,21,22,23,24,25. Conversely, parietal areas and premotor cortices are also active in internally- generated movements21,26,27,28, stimulation of these areas produces the conscious experience of action11, and parietal lesions alter the awareness of volition29. These findings suggest we move away from the viewpoint of select cortical regions to a more cortex-wide view as underlying the control of these two types of movements.
In a previous Ca2+ imaging study30, we found that the most anterior portion of the mouse secondary motor cortex (M2) increases in functional connectivity (FC) with all other regions of the dorsal mouse cortex during spontaneous locomotion, even as the rest of the cortex decreases in FC. M2 is an upstream motor cortical region that has homologous functions to frontal, premotor, SMA, and pre-SMA31,32. In severe Parkinson’s disease, dysfunction of these areas is associated with freezing-of-gait33,34, a freezing of locomotion that can be alleviated with external cues35. Given this, and the association of M2-homologous regions with internally-driven movement, the question is if the widespread FC of anterior M2 in locomotion is dependent on spontaneous, internally-driven movement. However, the anterior subregions of M2 are also involved in cue driven, decision-making of discrete movements36,37, which would support a role for M2 in internally- and externally-driven movements.
To address this question, we used wide-field Ca2+ imaging in the mouse to examine both neural activation and functional connectivity across much of the dorsal cerebral cortex. We evaluated cortex-wide engagement as mice walked on a motorized treadmill, comparing the activation and network FC of the dorsal cerebral cortex to spontaneous locomotion. A challenge in comparing internally- versus externally-generated locomotion is to account for differences in kinematics. To reduce this concern, we used partial least squares regression (PLSR) to regress out the contributions of potentially confounding motor and behavior variables, such as arousal level and locomotion speed. We observed marked differences in both the patterns of cortical activation and FC in motorized and spontaneous locomotion independent of kinematics. Motorized locomotion exhibits lower activation than spontaneous across the cortex during rest, continued walk, as the animal comes to a stop, and in the seconds immediately after termination, but there is higher widespread activation in the seconds before and after locomotion initiation. The locomotion FC state, in which anterior M2 increases in FC while the remainder of the dorsal cortex decreases, is present in both motorized and spontaneous walk, demonstrating that this FC pattern is ubiquitous across externally- and internally-driven locomotion. However, M2 FC is elevated before the start of locomotion in the motorized condition compared to spontaneous but is lowered during stopping and continues to be so in the seconds after termination. Our results support that it is the differences in the cortex-wide spatial patterns of activation and FC that underpin internally- versus externally-generated movements.
Results
Behavior during motorized treadmill and spontaneous locomotion
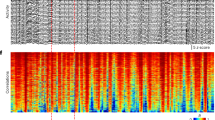
Seven Thy1-GCaMP6f transgenic mice were trained to walk head-fixed on a horizontal disk motorized treadmill through pseudo-randomly timed stages of continued locomotion (speed of 2.22, 2.77, 3.33, or 3.88 cm/s) and rest (0 cm/s) (Fig. 1A–C). Transition periods (“starting”, “stopping”, and “accelerating” or “decelerating”) occurred after rest or between locomotion at different speeds. Mice were trained with audio cues presented 5 s before each transition, and the 3 s before starting labeled the “pre-start” period. Similarly, the 3 s period after starting was labeled “post-starting” and the 3 s after stopping was labeled “post-stop.” The mice were also allowed to walk or rest spontaneously immediately before or after motorized treadmill sessions, and spontaneous locomotion was similarly subdivided into behavioral epochs (Fig. 1D). We collected a total of 62.5 hours of wide-field Ca2+ fluorescence imaging during the motorized task (mean 8.9 ± 2.0 hours per mouse), in addition to 30.8 hours during spontaneous locomotion (mean 4.4 ± 0.9 hours per mouse), which resulted in ~1500 occurrences of each transition type. The total number of occurrences of each behavior period collected and analyzed (see Methods) is provided in Table 1, and the average duration of spontaneous rest and or continuous walk bouts is given in Table 2. An example of the cortical activation for a single occurrence of motorized locomotion (hemo-corrected ΔF/F%; see Supplementary Fig. 1) reveals the modulation dynamics from rest, through walk, and back to rest (Fig. 1E). In addition to modulation prior to walking, there are widespread increases in cortical modulation during starting, post-starting, and walk periods, followed by decreased cortical activation during stopping, post-stop, and rest, consistent with previous observations30,38. For the remainder of this work, post-starting is not considered further, as it is not present in the spontaneous condition.

A Experimental set-up for Ca2+ fluorescence imaging of head-fixed mice in the motorized treadmill task. B Approximate cortical regions, as defined by the Allen Brain Atlas Common Coordinate Framework30, observable through the polymer skull (inset) by epifluorescence microscopy. Scale bar = 1 mm. Common Framework colors correspond to cortical regions defined in key. Panels A and B adapted from West, S. L. et al. Wide-Field Calcium Imaging of Dynamic Cortical Networks during Locomotion. Cereb Cortex 32, 2668-2687 (2022). https://doi.org/10.1093/cercor/bhab373. Behavioral tasks are divided into behavioral periods for motorized locomotion (C) and spontaneous locomotion (D). E Example pre-processed maps of cortical activity shown as mean subtracted % change in fluorescence (∆F/F) for a single occurrence of motorized treadmill locomotion in mouse #7. For visualization only, each frame is an average across 1 second. Source data are provided as a Source Data file.
We monitored 8 behavior variables during both motorized and spontaneous locomotion (see Methods). In addition to locomotion speed and acceleration rate, we recorded front left paw speed (FL), hind left paw speed (HL), velocity of the front left paw in the x-dimension (FLx), tail speed, and nose speed (Supplementary Fig. 2). Together, these allow us to track and account for limb and body movements that may differ across experimental conditions. We also recorded pupil diameter as a measure of arousal38,39 and the time elapsed since the beginning of the current behavior period (“duration”) for a total of 9 behavior variables.
Compared to motorized locomotion, mice walk faster when allowed to walk spontaneously (7.0 ± 3.4 cm/s in continued locomotion, mean ± SEM; Supplementary Fig. 3A). The speed of the motorized treadmill was limited to slower speeds to ensure the animal’s safety and comfort. Accordingly, FL, HL, and tail speed are also increased in the spontaneous condition (Supplementary Fig. 3C, D, G). The peak spontaneous acceleration rate during starting and stopping is higher than acceleration rates on the motorized treadmill (8.9 ± 0.8 cm/s/s during starting and 8.4 ± 0.9 during stopping, mean ± SEM, while the starting and stopping motorized treadmill acceleration rate was set to 0.56 or 1.11 cm/s/s; Supplementary Fig. 3Biii, v). In the spontaneous condition, there are short duration, small amplitude movements of the FL, HL, and tail just prior to locomotion onset as the mice prepare to walk (Supplementary Fig. 3Cii, Dii, Gii). The speed of the limbs and tail stay elevated throughout locomotion in both conditions (Supplementary Fig. 3Civ, Div, Giv). Average nose speed does not change across the different periods (Supplementary Fig. 3F), except for a small, short duration increase prior to spontaneous locomotion (Supplementary Fig. 3Fii). Pupil diameter suggests the mice are more aroused during the motorized rest than spontaneous rest (Supplementary Fig. 3Hi), likely reflecting the anticipation of auditory cues and movement of the treadmill. Interestingly, pupil diameter increases in the spontaneous condition over that of the motorized condition in preparation for locomotion, and it remains higher during locomotion starting (Supplementary Fig. 3Hii, iii). Pupil diameter remains elevated in both conditions during continued walk and stopping, with greater diameters in spontaneous corresponding to higher locomotion speeds (Supplementary Fig. 3Hiv, v), and then falls gradually after locomotion offset (Supplementary Fig. 3Hvi). The gait differences in FL, HL, and tail movement during step strides between the motorized and spontaneous conditions can largely be explained by differences in overall locomotion speed (Supplementary Fig. 4). We first evaluate the activation and FC patterns in both conditions without accounting for these behavior variables, then we investigate these after normalization of the behavior with PLSR.
Cortical activation in motorized and spontaneous locomotion
To analyze cortical modulation during locomotion, we spatially segmented the cortex using spatial Independent Component Analysis (sICA) and found 32 functional regions consistent across mice, called “nodes” (see Methods). Nodes fell into 6 approximate anatomical cortical regions, labeled here as secondary motor (M2), primary motor (M1), somatosensory (S1), lateral parietal (LP), mid-parietal and visual (MV), and retrosplenial (Rs) cortices (Fig. 2A, B). Mean activation time series (percent change in fluorescence divided by baseline fluorescence, ΔF/F%) were extracted for each node from the binary mask of the corresponding spatial independent component (IC). Figure 2C, D show the activation for each behavior period as a percent change from the mean (%ΔF/F) averaged across all subjects, while Fig. 2E, F show the significant change in mean activation of each behavior period compared to rest (1000 permutation t-test, α < 0.05, corrected with the Benjamini-Hochberg procedure). The significant differences between the motorized and spontaneous conditions in equivalent behavior periods are given in Fig. 2G (1000 permutation t-test, α < 0.05, corrected with the Benjamini-Hochberg procedure).

A Approximate cortical locations of the 32 nodes found common across all mice. B The spatial independent component (IC) domains used for each mouse. The color of each IC corresponds to the assigned node ID colors shown in A. Note that the blood vessels within an IC are removed, causing their fragmented appearance (see Methods). C, D (i-vi) ΔF/F% over time of each node across locomotion behavior periods for motorized treadmill (C) and spontaneous locomotion (D) conditions. E, F (i-v) Mean activation of each node across locomotion behavior periods for motorized treadmill (E) and spontaneous locomotion (F) displayed as the absolute difference in ΔF/F% from rest. Both the size and color of a node correspond to the amplitude of the activation difference. Only significant changes are shown (α < 0.05, permutation test corrected with the Benjamini-Hochberg procedure). G (i-vi) The significant mean difference in node activation between the motorized and spontaneous conditions, displayed as in E & F (α < 0.05, permutation test corrected with the Benjamini-Hochberg procedure). Positive changes indicate higher fluorescence amplitude in the motorized treadmill condition at a given node. Panels within the gray dotted boxes are displayed using the color bar within that box. Source data are provided as a Source Data file.
There are both similarities and marked differences in cortical activation between motorized and spontaneous locomotion. During rest, activation from IC nodes remain close to the average (Fig. 2Ci, Di). An exception is nodes 9-14 in M1 and S1, which have lower activation in motorized rest (Fig. 2Gi). Locomotion recreates the activation pattern observed in the unsegmented cortex (Fig. 2C–F). In the motorized condition, there is a general increase in activation during the pre-start period that begins at least 3 s before the motor onset in response to the warning cue (Fig. 2Cii, Ei). To ensure this activation was due to anticipation of locomotion onset and not to a response to the sound of the cue itself, we trained mice with an additional “control delay” cue that signaled instances when the treadmill would not start and instead remain at rest. This control delay period shows a much smaller increase in activation (Supplementary Fig. 5A–C), indicating the animals were indeed anticipating the start of the treadmill during the pre-start period. In contrast, the spontaneous pre-start condition is characterized by a general decrease in activation, with an increase in activation occurring only just before locomotion onset (Fig. 2Dii, Fi, Gii). Both motorized and spontaneous starting are characterized by cortex-wide activation increases, although this increase is approximately twice as large, more prolonged, and engages more nodes in the motorized case (Fig. 2Ciii, Diii, Eii, Fii, Giii).
In both conditions, activations diminish once steady-state walk is reached but remains above resting levels (Fig. 2Civ, Div, Eiii, Fiii, Giv). Nodes 9-14 in M1 and S1 show the largest activations compared to rest, but significant increases are apparent in all regions except LP. The increase in the parietal cortex, specifically, is consistent with previous observations26 on neuronal activity in the cat posterior parietal area 5 during steady locomotion compared to sitting and standing. Interestingly, large differences between motorized and spontaneous emerge during locomotion stopping (Fig. 2Cv, Dv, Eiv, Fiv, Gv). In the motorized condition, activations across the cortex drop to levels lower than those at rest, with the largest decreases occurring in several nodes including S1, LP, M1, MV, and Rs (Fig. 2Cv, Eiv). Meanwhile, spontaneous stopping maintains the increases present at steady-state walk (Fig. 2Dv, Fiv, Gv). In both conditions, activation decreases during the post-stop period, although that of motorized appears delayed and shows less involvement of S1 and MV regions relative to spontaneous (Fig. 2Cvi, Dvi, Ev, Fv, Gvi). These differences in the spatial-temporal patterns of activation, particularly prior to and following locomotion during which the motor variables are similar, suggest that different cortical states underlie motorized and spontaneous locomotion.
Functional connectivity in motorized and spontaneous locomotion
In addition to activation, we determine the FC across the dorsal cerebral cortex by calculating the Pearson correlation of the activation timeseries between each pair of nodes in a 1 s sliding window. These values were averaged across windows resulting in 496 unique node-node correlation pairs for each behavior period. Figure 3A, B displays the significant mean change in FC of each behavior period compared to rest, while the significant difference between motorized and spontaneous conditions are given in Fig. 3C (1000 permutation t-test, α < 0.05, corrected with the Benjamini-Hochberg procedure). At rest, the FC in the motorized condition is generally lower than spontaneous, except in M1 nodes 7 and 8, and between M2 and posterior MV and Rs nodes (Fig. 3Ci). These nodes also increase in the motorized condition during pre-start (Fig. 3Ai) and during the control delay period (Supplementary Fig. 5E). In contrast, spontaneous pre-start instead shows decreases in FC between M2 nodes 1/2 with most other nodes, as well as decreases among M2 nodes, between LP and M2 nodes, and among ipsilateral M1 nodes (Fig. 3Bi, Ci).

A (i-v, top) Significant change in FC of motorized behavior periods compared to the motorized rest period (α < 0.05, permutation corrected with the Benjamini-Hochberg procedure). (i-v, bottom) The total mean change of FC with all other nodes for each node. Both the size and color of a node correspond to the amplitude of the mean FC change. B Similar to A, but for spontaneous locomotion. C (i-vi, top) Significant differences in FC across experimental conditions (from spontaneous to motorized treadmill locomotion, motorized minus spontaneous). Positive changes indicate higher FC in the motorized treadmill condition at a given node. (i-vi, bottom) The total mean difference in FC with all other nodes for each node across conditions. For all panels, only significant changes are shown (α < 0.05, permutation test corrected with the Benjamini-Hochberg procedure). Panels within the gray dotted boxes are displayed using the color bar within that box. Source data are provided as a Source Data file.
Once locomotion begins, a robust pattern of FC emerges in both the motorized and spontaneous conditions. FC decreases throughout much of the cortex, except the most anterior nodes of M2 (nodes 1 &2), which increase in FC with all other nodes (Fig. 3A & B ii-v). This pattern begins in starting, persists through continued walk and stopping, and ends only after locomotion offset in the post-stop period (Fig. 3A & B ii-v). This is consistent with our previous findings in spontaneous locomotion30. At starting in both conditions, there are also increases in LP nodes with all other nodes and among posterior MV nodes (Fig. 3Aii, Bii). These additional increases are significantly stronger in spontaneous than motorized (Fig. 3Ciii), but are diminished by the time continued walk is reached in both conditions (Fig. 3Aiii, Biii). During starting, walk, and stopping, motorized displays generally lowered FC compared to spontaneous (Fig. 3Civ, v), with a strong difference in all M2 nodes, especially during stopping (Fig. 3Cv). After locomotion offset, the FC patterns of the motorized and spontaneous conditions again become markedly dissimilar (Fig. 3Av, Bv, Cvi). In motorized, the locomotion FC pattern persists into post-stop, although at a weak amplitude (Fig. 3Av). In contrast, spontaneous post-stop exhibits increases in M1, anterior S1, and LP FC above resting levels that were not present during active locomotion (Fig. 3Bv). Taken together, these findings show that both motorized treadmill and spontaneous locomotion utilize a similar FC pattern across the cortex but with several notable differences.
Normalization of behavior variables using Partial Least Squares Regression
While our above results show significance differences in the cortical states of externally-and internally-driven locomotion, the motorized and spontaneous locomotion display differences in kinematics (Supplementary Fig. 3). This raises the possibility that the observed differences in cortical state between motorized and spontaneous locomotion are in fact due to the differences in behavior variables such as locomotion speed, acceleration rate, or arousal. Therefore, we normalized the effect of the measured behavior variables on cortical activation and FC across both conditions using PLSR. For each behavior period, we modeled activation or FC as a function of the 9 behavior variables across both motorized and spontaneous conditions (see Methods). The goal was to explain as much variability as possible that is not directly related to the cortical state underlying externally- or internally-driven locomotion. The residuals of these regressions represent the activation or FC data without the influence of these behavioral variables and can be used for comparison across the two conditions.
The behavior variables together explained 4.1–12.9% of the variability present in the cortical activation (low: continued walk; high: starting) and 3.6–9.9% of variability in FC (low: stopping; high: pre-start; Supplementary Fig. 6). The variability explained by each variable changes considerably across behavior period and data type, suggesting the influence of these variables is highly dependent on the behavior state. The effect each behavior variable exerts on the patterns of cortical activation and FC (the regression beta coefficients) is also highly dependent on the behavior period (Supplementary Fig. 7 and Supplementary Fig. 8). We would highlight that the behavioral variables have the least influence during continued walk, suggesting both cortical activation and FC during walk are more the influence of behavior state than of motor kinematics. Activation during rest and continued walk is most influenced by duration (Supplementary Fig. 6A). As the duration of an occurrence of rest increases, activation increases (Supplementary Fig. 7Ci), but as the duration of an occurrence of walk increases, activation decreases (Supplementary Fig. 7Civ). The influence of pupil dimeter is generally small, except for on activation in pre-start and starting (Supplementary Fig. 6A), suggesting arousal’s influence is greatest in these periods.
Cortical activation patterns after removal of behavioral variables with PLSR
Motorized and spontaneous activation time courses become more similar after removal of the effects of the behavioral variables with PLSR (compare Fig. 4 with Fig. 2C–G). This suggests that many of the differences in activation across conditions prior to PSLR (Fig. 2–G) are due to differences in behavior captured in the 9 behavioral variables. Despite this, there remain several significant differences in cortical activation. During rest, the most marked differences occur in S1 nodes (Fig. 4Ai, Bi, Ei), which are less activated in motorized rest than spontaneous. During pre-start, while both motorized and spontaneous activation is increased (Fig. 4Aii, Bii, Ci, Di), the motorized activation is significantly higher than spontaneous across the entire cortex, (Fig. 4Eii). Importantly, the increases in motorized pre-start activation are also significantly higher than that of the motorized control-delay period, indicating anticipation of the motorized starting period (Supplementary Fig. 9A–C).

A, B (i-vi) ΔF/F% over time of each node across locomotion behavior periods for motorized treadmill (A) and spontaneous locomotion (B) conditions after PLSR removal of the effects of behavior variables. Panels within the black box are displayed using the color bar within the box. C, D (i-v) Mean activation of each node across locomotion behavior periods for motorized treadmill (C) and spontaneous locomotion (D) displayed as the absolute difference in ΔF/F% from rest, after PLSR removal of the effects of behavior variables. Both the size and color of a node correspond to the amplitude of the change in activation. Panels within the gray dotted boxes are displayed using the color bar within that box. E (i-vi) The significant mean difference in node activation between the motorized and spontaneous conditions after PLSR removal of the effects of behavior variables, displayed as in C and D (α < 0.05, permutation test corrected with the Benjamini-Hochberg procedure). Positive changes indicate higher activation amplitude in the motorized treadmill condition at a given node. For panels C, D only significant changes are shown (α < 0.05, permutation test corrected with the Benjamini-Hochberg procedure). Source data are provided as a Source Data file.
During starting, both motorized and spontaneous activation increases to a level greater than that reached before PLSR normalization (Fig. 4Aiii, Biii, Cii, Dii; note scale changes from Fig. 2Ciii, Diii, Eii, Fii), but with motorized significantly higher than spontaneous in all nodes (Fig. 4Eiii). As before, once continued locomotion is reached, activation drops but remains above rest levels (Fig. 4Aiv, Biv, Ciii, Diii). However, motorized walk activation is lower than spontaneous (Fig. 4Eiv) and remains so until locomotion is terminated (Fig. 4Ev-vi). With PLSR correction, both motorized and spontaneous stopping now decrease in activation below rest levels, with the exception of nodes 13/14 in S1 (Fig. 4Civ, Div). Activation levels then remain lowered during post-stop in both conditions (Fig. 4Cv, Dv). Therefore, while there are common features in activation after removal of the behavioral variables, there are marked, cortex-wide differences in activation associated with the motorized and spontaneous state, with greater activation in motorized during pre-start, starting, but less activation in motorized during stopping and post-stop.
Cortical FC after removal of behavioral variables with PLSR
As with activation, PLSR normalization makes the motorized and spontaneous FC patterns more similar (compare Fig. 5 with Fig. 3; note the change in scale of Fig. 5C), highlighting common mechanisms between the two conditions. But again, there are also significant differences between the two (Fig. 5C). At rest, much of the cortical FC remains lower in motorized than in spontaneous, while nodes 7/8 in lateral M1 remain higher. In pre-start, both motorized and spontaneous now exhibit widespread and high levels of FC (Fig. 5Ai, Bi), which is not apparent without behavior normalization (see Fig. 3). However, unlike with activation, the increase in motorized pre-start is not significantly different from that of the control-delay period (Supplementary Fig. 9D, E). All three nodes in M2 exhibit higher FC in pre-start over spontaneous, evidence that, somewhat unexpectedly, externally driven locomotion strongly engages premotor cortices. The retrosplenial nodes and the lateral M1 nodes 7/8 are similarly heightened, likely reflecting these regions’ involvement in sensorimotor transformations40,41.

A (i-v, top) Significant mean change in FC of motorized behavior periods compared to the motorized rest period (α < 0.05, permutation test corrected with the Benjamini-Hochberg procedure). (i-v, bottom) The total mean change of FC with all other nodes for each node after PLSR removal of the effects of behavior variables. Both the size and color of a node correspond to the amplitude of the mean FC change. Panels within the gray dotted boxes are displayed using the color bar within that box. B Similar to A, but for spontaneous locomotion. C (i-vi, top) Significant differences in FC across experimental conditions after PLSR removal of the effects of behavior variables (from spontaneous to motorized treadmill locomotion, motorized minus spontaneous). Positive changes indicate higher FC in the motorized treadmill condition at a given node. (i-vi, bottom) The total mean difference in FC with all other nodes for each node across conditions. For all panels, only significant changes are shown (α < 0.05, permutation test corrected with the Benjamini-Hochberg procedure). Source data are provided as a Source Data file.
During starting in both conditions, FC now increases across the majority of the cortex compared to rest (Fig. 5Aii, Bii), and the majority of differences in FC between motorized and spontaneous starting disappear after normalization (Fig. 5Cii). Duration contributes strongly to this period (Supplementary Fig. 6B), and FC across the cortex decreases over time (Supplementary Fig. 8Ciii). Therefore, in both conditions there is a large increase in FC at the initiation of movement, which then falls over the starting period before steady-state walk is reached. Steady-state walk continues to display the previously observed locomotion pattern in both conditions after normalization of the behavior, with increased M2 FC with all other nodes and decreased FC throughout the remainder of the cortex is (Fig. 5Aiii-iv, Biii-iv). The preservation of this pattern suggests it is innate to the locomotion state and is not dependent on the removed behavior variables. In fact, there are now few differences in walk FC across the two conditions (Fig. 5Civ). However, there are striking differences during stopping FC between motorized and spontaneous. The locomotion FC pattern is maintained in both conditions as before, but there is significantly lower involvement of all M2 and LP nodes in the motorized condition (Fig. 5Aiv, Biv, Cv). There are further differences during post-stop. Although both spontaneous and motorized now show rebound connectivity in M1, S1, and LP nodes (Fig. 5Av, Bvi), the anterior most M2 nodes (1/2) show less FC in motorized than spontaneous (Fig. 5Cvi). Furthermore, the posterior nodes of MV (25/26) have lower connectivity with S1 and other MV nodes in the motorized condition (Fig. 5Cvi). We provide an example of the FC of each period from a single mouse, which shows that the FC patterns in the individual are overall similar to the average across mice (Supplementary Fig. 10). Overall, with PLSR correction of the behavior variables, there are significant differences in FC between the motorized and spontaneous locomotion condition restricted to the pre-start, stopping, and post-stop behavior periods.
Accelerating and decelerating periods
We were also interested in cortical engagement during locomotion transition states beyond starting and stopping.
The motorized task includes accelerating and decelerating periods in which the mouse changes from one steady-state walking speed to another without first returning to rest (Fig. 1C; see Methods). Because the effects of the measured behavior variables are removed from the cortical data using PLSR, these periods can be interpreted as locomotion transition states with minimal influence of confounding variables such as speed or acceleration rate.
The patterns of activation and FC in accelerating and decelerating transitions suggest additional cortical states within motorized locomotion. These patterns are shown in Fig. 6 after the PLSR normalization of behavior variables, with each period compared to continued walk. Cortical activation across the cortex decreases from steady-state walk levels when the motorized treadmill accelerates (“accelerating”; Fig. 6Ai) or decelerates (“decelerating”; Fig. 6Bi), with decelerating exhibiting a more dramatic drop (Fig. 6Ci). Activation remains depressed through the first 3 seconds after a new steady-state walking speed is reached (“post-accelerating” or “post-decelerating periods”; Fig. 6Aii, Bii). FC during accelerating decreases in connections among M1 and S1, and between these regions and anterior MV nodes 21/22 (Fig. 6Ci). Decelerating shows only sparse significant decreases in FC from walk (Fig. 6Di). Some connections in M2 nodes and posterior MV nodes (25/26) are significantly higher in accelerating compared to decelerating, although these are sparse (Fig. 6Eii). Once the post-accelerating or post-decelerating periods are reached, however, there is a widespread increase in FC (Fig. 6Cii, Dii). Therefore, the transitions of accelerating, decelerating, and the return to steady-state walk are distinct behavior states from continued walk independent of locomotion kinematics. Unfortunately, these distinct transitions are not available in the spontaneous condition, as the mice rarely spontaneously changed between speeds in a distinct manner. The most analogous measure, the effect of acceleration rate during steady-state walk (where motorized walk always has an acceleration rate of 0), shows a small positive relationship between acceleration rate and activation (Supplementary Fig. 7Biv) and FC (Supplementary Fig. 8Biv).

A Significant difference in activation of the motorized treadmill accelerating (i) and post-accelerating (ii) periods compared to continued walk, after PLSR removal of the effects of behavior variables. Values are displayed as the absolute difference in ΔF/F% from continued walk, and both the size and color of a node correspond to the amplitude of the activation difference. B Similar to A but for the decelerating (i) and post-decelerating (ii) periods. C (top) Significant differences in FC between accelerating and post-decelerating periods compared to continued walk, after PLSR removal of the effects of behavior variables. (bottom) The total mean change of FC with all other nodes during accelerating (i) and post-accelerating (ii) periods compared to continued walk for each node after PLSR removal of the effects of behavior variables. Both the size and color of a node correspond to the amplitude of the change in FC. D Similar to C but for the decelerating (i) and post-decelerating (ii) periods. E The significant difference in activation (i), FC (ii, left), and mean FC (ii, right) between the accelerating and decelerating periods (accelerating minus decelerating). Positive values indicate higher activation or functional connectivity in the accelerating period. For all panels, only significant changes are shown (α < 0.05, permutation test with corrected with the Benjamini-Hochberg procedure). Source data are provided as a Source Data file.
Relationship between activation and FC
An important question is if changes in FC of a region can be explained by large baseline shifts in its overall activation in different behavior periods. It could be imagined, for example, that elevated activity across the cortex may reflect uniform information expressed across all areas, thus increasing FC between them by definition. It is evident from our results thus far that this is not the case in every behavior period; for example, the widespread elevation in activation during walk in both conditions are not reflected in the FC (Figs. 4 and 5). However, we sought to test for this trend across all periods. To quantify the relationship between activation and FC, we calculated the correlation between the change in activation and the change in mean FC across all analyzes for each node (calculated for 16 matched sets of contralateral nodes). None of the correlations are significant (Supplementary Fig. 11; 5000 permutation t-test, corrected with the Benjamini-Hochberg procedure). Therefore, FC is not simply a reflection of the level of neural activity, supporting the concept that correlation and activation are distinct modes of information processing and representations of locomotor behavior.
Discussion
We used wide-field calcium imaging to evaluate the evolution of cortical activation and FC networks through stages of both motorized and spontaneous locomotion. To the best of our knowledge, neither the activity nor the FC of the mouse dorsal cerebral cortex as a whole have been observed during externally-driven locomotion. We used PLSR to remove the effects of 9 behavior variables from the cortical activation and FC in order to isolate the influence of locomotion state. Several major findings resulted from this study. First, we confirmed our previous results in spontaneous locomotion that a distinct locomotion FC pattern emerges during steady-state walk that persists through stopping30. This FC pattern, characterized by increases in M2 and decreases in all other regions, occurs in both spontaneous and motorized locomotion and is independent of differences in behavior variables. Thus, this pattern represents a common locomotor cortical state and is not unique to internally-driven movement. Second, the motorized condition exhibits less cortical activation than spontaneous during the rest, continued walk, stopping, and post-stop periods, but greater activation during pre-start and starting. Third, M2 nodes show increased FC during motorized pre-starting compared to spontaneous and significantly less FC in stopping and post-stop. Fourth, the accelerating and decelerating motorized periods cause generalized decreases in activation, but FC is not affected until a new steady-state speed is reached and FC increases across the cortex. Finally, the patterns of activation and FC across behavior periods are not correlated, providing two modes of encoding and controlling cortical neural dynamics. Together, these results show externally-driven locomotion utilizes different cortical integration strategies than internally-driven, with M2 playing a differentiating role in the control of externally- and internally-driven locomotion termination.
Cortical activation in motorized and spontaneous locomotion
Both motorized and spontaneous locomotion exhibit widespread increases in activation before and at the start of locomotion (Fig. 4Aiii, Biii, Cii, Dii). This increase is larger in the motorized condition (Fig. 4Eiii). In both conditions, this initial activation decreases as the mouse enters steady-state walk, but remains above resting levels, similar to previous reports30,39,42. This greater activation in motorized locomotion is striking and may be due to the increased computations required by the cortex to process incoming sensory information and develop an appropriate motor response. However, this activation diminishes to less than that of spontaneous once continued walk is reached (Fig. 4Eiv), indicating less cortical computations are required in externally-driven steady-state locomotion. In addition, stopping in both conditions leads to a decrease in activation below levels seen at rest, although motorized drops somewhat further (Fig. 4Ev). This is a surprising finding, possibly due to an overall inhibition of cortico-cortical information exchange and a higher dependence on subcortical circuitry as slowing and stopping occur. Irrespective of the mechanism, these differences in activation emphasize that externally- and internally-driven locomotion utilize aspects of the dorsal cortical circuity quite differently.
Presence of locomotion functional connectivity state
We confirm our previous findings30 that locomotion exhibits a widespread decrease in cortical FC compared to rest, even though neural activity in these areas increases43,44,45,46. The exception to this is the increase in FC of anterior M2 nodes with nodes across the cortex, beginning at locomotion onset and persisting until locomotion offset (Fig. 5). A recent study notes a similar FC pattern in spontaneous locomotion46. Here, this pattern occurs in both spontaneous and motorized locomotion and remains after PLSR normalization, suggesting that this is a general FC pattern during walking. This opposes our original hypothesis that M2 FC would be higher in spontaneous locomotion due to the association of M2-homologous areas with internally-driven movement in primates1,2,21. We note that our results do not reproduce the increases in FC between retrosplenial nodes and other cortical regions during locomotion found in previous experiments30,43. Those increases may be due to behavior variables beyond the change in state. Each of the cortical regions imaged show task-specific activity during walking, such as adjustment of gait in M147,48,49,50, encoding of obstacles to be avoided in parietal cortex51,52,53,54, and modulation of sensory encoding in somatosensory and visual cortices55,56,57,58. Therefore, each of these regions engages in unique roles, and the proportion of shared activity across them likely decreases. This may underly the general decrease in FC between cortical regions observed in both locomotion conditions. In the case of the anterior M2 nodes, anterior M2 has been identified as a key player in the initiation and control of voluntary movement in mice36,37 while premotor regions have been linked to the control of locomotion and its initiation in cats59 and humans33,60,61,62. Moreover, considerable evidence suggests locomotion-dependent modulation across the dorsal cortex is driven from M231,46,63,64,65,66,67,68. Therefore, the increase in M2 FC in both conditions may reflect a control signal from M2 to other cortical regions that carries movement information to the rest of the cortex throughout locomotion.
Differences in FC between externally- and internally-driven locomotion
Despite very similar activation levels (Fig. 4Ei), FC during rest in the two experimental conditions suggests a different cortical strategy is used in the motorized condition as the animal waits for the start of a trial (Fig. 5Ei). FC of lateral S1 nodes corresponding to the front limbs are increased, while other nodes are decreased compared to spontaneous rest. This may reflect a greater dependence of cortical state on incoming somatosensory information over the spontaneous condition. Both conditions show large, widespread increases in FC before movement onset (Fig. 5Cii) coinciding with an increase in activation. We previously found such an increase before spontaneous locomotion, which did not depend on an increase in activity30. Interestingly, the motorized control delay period shows an equally-sized FC increase, but the accompanying change in activation is significantly smaller than in the pre-start periods (Supplementary Fig. 9). Therefore, this widespread FC increase may be a function of cross-cortical integration common to all three states (internally-driven locomotion preparation, externally-driven locomotion preparation, and externally-driven locomotion suppression) that is not dependent on changes in overall activity levels. This pattern resembles the ramp-up summation pattern of increasing neural activation found in primate frontal and parietal regions in primates and across the cortex in rodents before decision-based movements39,69,70,71,72,73,74. As observed here, changes in cortical function can occur up to several seconds before movement onset2,68,70,75. Therefore, the observed increase FC may reflect decision-making neural processing occurring before locomotion onset. M2 FC is higher during the motorized pre-start and control-delay periods than in spontaneous pre-start (Fig. 5Cii), perhaps reflecting the role of M2 in decision-making36,37 and sensorimotor transformation32,46.
Starting FC is similar in both conditions (Fig. 5Ciii), displaying large increases across most of the cortex (Fig. 5Aiii, Biii). This is despite a larger increase in activation in motorized starting (Fig. 4Eiii). Much of the variability in starting FC is explained by duration (Supplementary Fig. 6B), indicating the increase in FC occurs as soon as locomotion begins, regardless of other behavior variables, then diminishes over time to the continued walk FC pattern. This possibly represents a coordination across cortical regions to adjust to a new behavior state. Once continued walk is reached, there are again few differences in FC between motorized and spontaneous that cannot be explained by differences in behavior variables (Fig. 5Civ), even though motorized walk shows lower activation (Fig. 4Eiv). However, at locomotion termination, a clear separation emerges. In spontaneous stopping, the FC of all M2 nodes increases slightly from walk to levels higher than that of motorized (Fig. 5Ev). Then, in post-stopping, spontaneous FC remains higher in the most anterior M2 nodes (Fig. 5Evi). Prefrontal cortical or M2 activity is thought to act as a “stop” control signal to subcortical structures to slow or inhibit locomotion76,77,78. Our results support such a role for M2 in locomotion inhibition in spontaneous locomotion, and this role is reduced in the externally-driven motorized treadmill case.
Accelerating and decelerating transition periods
During the motorized treadmill condition we introduced controlled changes in speed during the accelerating and decelerating periods. Using PLSR, we removed the effects of the locomotion speed, acceleration rate, and other behavior variables from the activation and FC in these periods, leaving only the effects of the transition state itself. Unexpectedly, activation decreases when accelerating or decelerating from steady-state walk and remains lowered through the initial adjustment to a new continued speed in the post-accelerating and post-decelerating periods (Fig. 6). Previous electrophysiology studies during changes in gait pattern suggest cortical activation increases during these periods59,79,80. However, these studies record from pyramidal neurons in the deep layers of the cortex, specifically layer V, which project to primarily to subcortical structures. Here, our recordings detect activation of pyramidal neurons in layers II/III and in addition layer V (see Methods). While the neurons in each of these layers project between cortical regions, cortico-cortical projections are the primary source of afferents to and efferents from layer II/III, and the neural populations of layer II/III and layer V show distinct activation patterns81,82. Therefore, our results may be a consequence of cortico-cortical activity decreasing during accelerating or decelerating periods, even as subcortical-projecting neural activity may increase. Human subjects walking on a treadmill find it easier to decrease their stepping rates over increasing them in response to an external cue78,83, and we accordingly see more cortical engagement in accelerating than in decelerating (Fig. 6Ei). Interestingly, the accelerating and decelerating periods have only limited effects on FC patterns, contrasting with activation. However, there are widespread increases in FC across the cortex once a new continued speed is reached (Fig. 6Cii, Dii). This may represent a coordination of cortical areas in response to a new behavior steady-state.
Relationship between activation and functional connectivity
We find that changes in activation and mean FC across periods are not correlated (Supplementary Fig. 11). That is, an overall increase or decrease in activation in a node does not influence its FC with other nodes. Similar relationships have been demonstrated in previous experiments using wide-field Ca2+ imaging30,43. This joins existing evidence that FC as a measure provides unique information about cortical state beyond activation in wide-field Ca2+ imaging84.
Limitations
There are limitations to the study presented. Importantly, we acknowledge that locomotion during head-fixation is not identical to naturally occurring, free-ranging locomotion. We strove to minimize the effects of head-fixation by habituating the animals to the behavioral setup and incrementally training them to walk comfortably on the motorized treadmill over at least 2 weeks before beginning experiments. Moreover, both the motorized and spontaneous locomotion conditions were performed with head-fixation, reducing differences between the two conditions. Additionally, we corrected for as many differences in behavior as possible between the two states by recording locomotion speed, acceleration rate, pupil diameter, paw speed, and other behavior variables and removing their effects on activation and FC using PLSR before comparisons between conditions were calculated. We nevertheless acknowledge that it is impossible to completely remove confounding factors from such a complex behavioral task. Unfortunately, head-fixation reduced the upper limit of the speed of the motorized treadmill that the mice could safely walk. Thus, the locomotion speeds in the motorized condition were lower than the average speed the mice used when walking spontaneously. However, this discrepancy was corrected by PLSR, therefore effects of speed differences on activation or FC across conditions were limited. We also acknowledge that PLSR may not capture nonlinear relationships, and we could not include additional behavioral caveats in the regression models, such as time lags between variables, as the computational complexity required to include such nuances quickly becomes unmanageable.
Generally, M2 in rodents is accepted to include functionality homologous to premotor cortex and SMA in primates31,32,85. Our spatial segmentation of the cortex identifies 6 nodes (3 per hemisphere) with unique functional connectivity patterns that fall approximately within the M2 atlas region. Many works studying discrete movement decision-making tasks subdivide M2 into functionally distinct subregions36,37,86. However, we did not directly compare the activation and FC in our locomotion task to a discrete voluntary movement task, making it challenging to directly equate the nodes used here with these subregions. Therefore, we do not attempt to link our findings to specific M2 subregions or to homologous regions outside of rodents.
Conclusion
In conclusion, during continued walking motorized and spontaneous locomotion have a similar pattern of FC, suggestive of a common locomotor state. However, cortical activation as well as FC during initiation and termination of walking are markedly different between externally- and internally-driven locomotion. These findings support the view that the cerebral cortex’s differential role in volitional versus sensory-driven action arises from the differences in neural dynamics across the cortex.
Methods
Animals and surgical setup
Seven Thyl-GCaMP6f mice were used in these experiments (3 female, 4 male; 3–12 months of age; C57BL/6J-Tg(Thy1-GCaMP6f)GP5.11Dkim/J, strain #024339, The Jackson Laboratory). Thy1-GCaMP6f mouse lines express GCaMP6f87 in layers II/III and V cortical excitatory pyramidal neurons88, allowing for wide-field Ca2+ fluorescence imaging of the activity of these neurons89,90. Mice were surgically implanted with See-Shell polymer windows over the dorsal cerebral cortex30,91,92,93. The window was placed during surgery in relation to anatomical points of the skull (bregma and lambda). This placement was used to align the Allen Brain Atlas Common Coordinate Framework94 and estimate approximate cortical regions (Fig. 1FB). Mice were housed in a 12hr-12hr light-dark cycle, with times of darkness (the period of mouse wakefulness) occurring during the day when experiments were performed. Animal rooms were kept at an ambient temperature of 68–74 °F and 30–70% humidity. All animal studies were approved by and conducted in conformity with the Institutional Animal Care and Use Committee of the University of Minnesota.
Behavioral task
After a minimum of 7 days recovery post-surgery, mice were habituated to the behavioral setup (Fig. 1A) over at least 4 days30,93. After habituation, mice were trained to walk on a motorized disk treadmill that introduced controlled locomotion with onsets, offsets, and changes in speed (Fig. 1C). Training occurred over at least 10 days by gradually increasing the locomotion speed and complexity of the motorized treadmill task.
The treadmill was powered by a stepper motor (MotionKing, Nema 17 2-phase stepper motor) driven by a high-current stepper motor driver (Texas Instruments, DRV8825 Stepper Motor Controller), and controlled with an Arduino Due microcontroller (Arduino) with custom Arduino code (Arduino IDE v1.8). The motorized treadmill behavior task was composed of 5-minute trials divided into stages of randomly varying length in time (3 to 25 s; Fig. 1C, top). Each trial began and ended with the motor at rest (speed = 0 cm/s). Intermediary stages ran the treadmill at one of 5 randomly assigned speeds: 0 (rest), 2.22, 2.77, 3.33, or 3.88 cm/s. At the beginning of each stage, the treadmill transitioned to the new speed at one of two possible randomly selected acceleration rates: 0.56 or 1.11 cm/s/s for starts and stops, and 0.28 or 1.11 cm/s/s for accelerating or decelerating periods. The speeds and acceleration rates were chosen by observing the comfortable walking speed of head-fixed mice, which are slower than mice comfortably attain in spontaneous locomotion (see Supplementary Fig. 3A). Speeds and acceleration rates also accounted for the hardware parameters of the stepper motor so that stages began and ended on 1.0- or 0.5-second intervals. Eleven periods were labeled for analysis: “rest”, “starting” (when the motorized treadmill changed from 0 cm/s to any other speed), “post-starting” (the 3 s immediately after the motor reaches the steady-state walking speed; this was not used in further analysis since it is not present in the spontaneous condition, see below), continued “walk”, “stopping” (from any non-zero speed to 0 cm/s), “post-stopping” (the 3 s immediately after the motor reaches 0 cm/s), “accelerating” (from any non-zero speed to a different, faster speed), “decelerating” (from any non-zero speed to a different, non-zero, slower speed), and “post-accelerating” and “post-decelerating” (the 3 s immediately after a period of accelerating or decelerating).
Auditory warning cues were presented to the mice before the treadmill changed speed to reduce surprise or startle and the presences of associated brain activity. After the mouse completed a training paradigm that slowly increased the latency between the warning cues and the onset of a transition, warning cues were presented 5 s before the transition and lasted a total of 1 s. Different tone patterns based on mouse auditory ranges95 indicated which of the 5 possible transitions would occur (Supplementary Table 1) and were played simultaneously on two piezoelectric buzzers (TDK, PS1240P02CT3). Playing these high-frequency tones while simultaneously controlling the stepper motor at a smooth rate required the processing rate of the Arduino Due (84 MHz). The periods between the tones and the onset of the transition were labeled as “delay periods”. A “maintaining” warning cue was given in 20% of cases, after which the motor made no change in speed. The delay period at rest and before starting was labeled the “pre-start” period. The delay period after a maintaining cue given at rest (which cues that the motor will not start) was labeled the “control delay” period. All other delay periods were not analyzed here. The 1 s in which the tones actively sound and the 1 s immediately after the tones were thrown out to remove activity resulting from direct auditory processing of the tones, leaving the 3 s immediately before the expected onset of the motorized treadmill for analysis.
Each mouse underwent 10 trials of the motorized task during Ca2+ fluorescence imaging per day, for a total of 50 minutes per day. In addition, mice were recorded for 5 trials of spontaneous locomotion for a total of 25 minutes per day, immediately before or after the motorized task. Spontaneous behavior was divided into rest, walk, and transition periods30. Spontaneous behavior kinematics were calculated from the treadmill angular displacement as measured by a high-resolution rotary encoder and recorded by an Arduino Uno microcontroller (Arduino) at 1 kHz. Speed was calculated and smoothed using a sliding average (100 ms window, 1-ms step size). Locomotion was defined as periods of movement in which the wheel reached a velocity of 0.25 cm/s or greater. Working back from 0.25 cm/s, movement onset was then defined as the time wheel speed first exceeded 0 cm/s, and movement offset was defined as the time speed returned to 0 cm/s. Periods in which speed remained between −0.25 cm/s and 0.05 cm/s were labeled as rest, while all remaining periods were discarded. The 3 s of rest immediately before movement onset was labeled as the “pre-start” period and the 3 s of movement immediately after onset was labeled the “starting” period (Fig. 1D). Similarly, the 3 s before and after movement offset were labeled “stopping” and “post-stop,” respectively. Clean sections of movement between starting and stopping at least 1 s in duration were labeled continued “walk,” while remaining clean sections of rest were labeled continued “rest.” More than 90 combined hours of motorized treadmill and spontaneous behavior imaging was collected, resulting in ~1500 occurrences of each transition type (Table 1). One mouse (mouse #4) only rarely walked spontaneously (Table 1) and was not included in further analysis. Behavior in both conditions was reported and recorded via the Arduino serial monitor and PuTTY terminal software.
Fluorescence imaging
All fluorescence imaging was performed with dual-wavelength illumination to minimize the effects of hemodynamics on the Ca2+ signal30,63,92,93. Briefly, mice were head-fixed beneath the fluorescence microscope on the motorized treadmill or freely moving disk (Fig. 1A) for imaging of the dorsal cerebral cortex (Fig. 1B). Ca2+-dependent (470 nm, blue light) and Ca2+-independent (405 nm, violet light) GCaMP6f signals were captured on alternating frames at 40 frames per second (fps; 20 fps per channel). The field-of-view was adjusted to image the exposed dorsal cortical surface (6.2 mm × 6.2 mm, 256 × 256 pixels) with a spatial resolution pixel of ~24.2 µm x 24.2 µm per pixel. Imaging was performed in 5-minute image stacks (1 per behavior trial), each 6000 frames in length per color channel. Individual frames of the fluorescence imaging, and the onset of the Arduino-controlled behavior task were timed by a custom program in Spike2 (Cambridge Electronic Design Limited, version 5.21).
Fluorescence preprocessing
All preprocessing and analysis was performed using custom code in MATLAB (MathWorks, version 9.11 R2021b). All images were spatially registered within a recording session using the MATLAB dftregistration function96. Images were then registered across recording sessions within mice using MATLAB Image Processing Toolbox function imregtform using an affine transformation. Brain masks were drawn for each mouse so only the pixels corresponding to brain were kept for further analysis. A 7 Hz low-pass temporal filter (5th -order Butterworth) was applied in both the forward and reverse directions. The effects of hemodynamics and other non-neuronal sources were removed from the fluorescence signal using the violet-channel images (Supplementary Fig. 1). Within each stack, the activity of each pixel in the blue channel was regressed against the activity of the corresponding pixel in the violet channel63. The residuals of these regressions were kept as hemo-corrected images, which were used in all subsequent steps of analysis.
Fluorescence spatial segmentation
Spatial segmentation of the dorsal cerebral cortex was performed with singular value decomposition (SVD) compression and independent component analysis (ICA). All fluorescence imaging per mouse was compressed to 500 SVD components using a randomized algorithm97. The Joint Approximation Diagonalization of Eigenmatrices (JADE) algorithm for ICA was used to find 100 independent components (ICs). The resulting ICs were thresholded to spatial domains of 150-5000 pixels in size. Each IC was thresholded so that pixels with z-scored weights below 3.5 were set to equal 0, and ICs of at least 150 contiguous remaining pixels were kept. If no domains of 150 pixels survived, this initial z-score threshold was reduced to 2.5, and any surviving domains of 150 pixels were kept. If initial thresholding instead generated domains greater than 5000 contiguous pixels in size, the surviving pixels underwent a second z-scoring and thresholded at the new z-score value of 1.0 and above. These larger domains occurred rarely and were isolated to areas along the midline of the cortex (nodes 3/4, 5/6, 27/28, 29/30; see below). Also, appreciate that 5000 pixels covers only 10.6% of the brain area imaged. After thresholding was complete in all cases, if more than one domain of at least 150 contiguous pixels occurred in a single IC, those domains were separated and treated as different in the following analysis steps. The resulting domains were visually inspected, and any domains corresponding to artifacts such as blood vessels were discarded. The dual-wavelength hemo-correction procedure may not remove all artifacts in the fluorescence signal due to the fluctuation of blood vessel diameter, particularly during the physical exertion of locomotion. To avoid such signal contamination in the remaining IC domains, pixels that overlapped with blood vessels were manually removed.
IC domains were manually assigned node IDs according to 32 domains that appeared consistently across mice (Fig. 1D and E). The thresholding of ICs is admittedly somewhat arbitrary, focused on automated, time-efficient analysis, and this occasionally discarded an IC in a given mouse that, on visual inspection, corresponded to a node actually present in all mice. Excluding nodes in individuals could detrimentally affect conclusions, therefore these ICs were manually cropped, thresholded, and included in further analysis.
Behavior data extraction and preprocessing
Nine behavior variables were recorded: locomotion speed, acceleration rate, instantaneous duration (i.e. the time since entering a behavior period), front left limb total speed (FL), hind left limb total speed (HL), velocity of the front left limb in the x-dimension (FLx), tail speed, nose speed, and pupil diameter. In the motorized treadmill condition, task parameters were extracted from the Arduino microcontroller output and analyzed using custom MATLAB code. The locomotion speed, motor acceleration rate, and duration were recorded for each time point. Disk speed and acceleration in the spontaneous locomotion trials was extracted, processed, and divided into behavior periods as described above. In both the motorized and spontaneous conditions, the absolute value of the recorded treadmill or disk acceleration rate was taken.
A high-speed, IR-sensitive CMOS camera (DMK 33UP1300, The Imaging Source, or Flea3, Point Gray) recorded the body movements 40 Hz throughout a session, under diffuse infrared light that did not interfere with the Ca2+ imaging (Supplementary Fig. 2A). A second IR camera recorded the eye at 20 Hz (Supplementary Fig. 2B). Behavioral videos were recorded using Spinnaker SDK software (FLIR Systems) and synchronized to the fluorescence imaging using a custom program in Spike2 (Cambridge Electronic Design Limited, version 5.21). The FL, HL, FLx, tail, and nose parameters were extracted from the full-body infrared video using DeepLabCut98. These were self-normalized to account for the oblique angle of the camera as well as small changes in camera position across recording days, and all results from these parameters are reported in normalized units (stds). Pupil diameter was extracted from the eye video using DeepLabCut98. Eight equidistant points were labeled and tracked around the pupil edge. For each frame, a circle was fit through to the points, and the diameter of that circle was calculated and normalized as a percent of the mouse’s maximum pupil diameter for that recording day.
Gait analysis
The relative timing of steps across limbs is an important characteristic of gait. Individual steps of each limb during continued walk were detected from the x-velocity of the FL and HL and from the y-velocity of the tail (Supplementary Fig. 4). The mean was removed from each velocity trace, and peaks in the velocity that reached more than 0.1 std units with a minimum of 0.25 s between peaks were kept. An individual step was defined as the stretch of time from one peak to the next for each limb. To compare the shapes of limb trajectories across motorized and spontaneous locomotion, all trajectories were resampled to a length of 10 time points (0.5 s) before averaging. Step lengths were calculated for each limb as the maximum displacement in the x-direction during a step. Step durations, lengths, and trajectories were averaged across all steps within a mouse before averaging across individuals. To visualize the phase difference of steps between limbs the HL and tail velocities were also segmented to align to the steps of the FL then resampled and averaged as above.
Fluorescence extraction and functional connectivity
To obtain fluorescence timeseries for each node, the mask of the corresponding IC for a given mouse was applied to the preprocessed fluorescence images. The IC weights within the mask were used to create a weighted mean fluorescence value per frame. All resulting fluorescence timeseries were converted to the percent change in fluorescence divided by baseline fluorescence (ΔF/F%), in which the baseline is the mean fluorescence across all recording sessions for each mouse and node. Timeseries were then segmented by behavior period. To find the mean activation timeseries over time within behavior periods (Fig. 2C, D, Fig. 4A, B) starting and stopping period timeseries were aligned to the start or stop of the motor, respectively, and truncated to 3.0 s after or before that point, respectively, before averaging across occurrences within and across animals. Rest and walk were subdivided into 1 s segments and each of these segments were treated as individual occurrences for these figures. Data was not truncated or subdivided in other analyzes. The mean activation difference across the entirety of behavior periods of interest (Fig. 2E–G, Fig. 4C–E) were found for each node and averaged across mice (n = 6), then converted into ΔF/F% by dividing by the mean fluorescence across all recording sessions.
For FC analyzes, fluorescence timeseries were subdivided using a sliding window with a 1.0 s (20 frame) window size and 0.25 s (5 frame) step size. Pearson correlation coefficients were then calculated on each 1.0 s window between the timeseries of all possible node pairs, creating FC matrices for each window (20 time points in each calculation, 496 total correlation pairs). The sliding windows were also applied to each behavior variable so that the average of that variable over the 1.0 s time window (20 time points) was matched to the corresponding FC matrix. The Fisher z-transformation was applied to all correlation coefficients to create approximately normally distributed datasets99,100. The FC of anatomically homologous nodes on the left and right hemispheres (nodes falling at the same anatomical location on the contralateral hemisphere) were averaged. Ipsilateral and contralateral relationships were preserved, however, by only averaging equivalent ipsilateral or contralateral correlations. The mean FC difference across behavior periods of interest were found for each node-node pair and averaged across mice (n = 6; Δr). The total mean change in FC of each node was calculated by taking the mean of all the FC changes of node-node pairs involving that node before averaging across animals (mean Δr of node). Statistics were calculated separately for the analysis of mean change in FC per node.
Partial least squares regression (PLSR)
Partial Least Squares regression (PLSR) was used to relate locomotion behavior to the activity and FC of the dorsal cerebral cortex. PLSR calculates latent dimensions (“components”) that best capture the covariance between a independent and a dependent dataset, then these components are used to perform a linear regression between the two101. A low number of components may capture the majority of the covariance, thus avoiding the issue of multicollinearity that results from a high number of predictor variables101,102,103. PLSR was performed using the MATLAB Statistics and Machine Learning Toolbox function plsregress101. Two levels of regressions were performed. The first level were continuous regressions in which either activation or FC were regressed against the behavior variables (speed, acceleration rate, duration, pupil diameter, FL, HL, FLx, tail, and nose) within each behavior period. Brain data were the dependent variables and behavior variables were the independent variables. The second were categorical regressions in which activity or FC were regressed against the different behavior periods, coded as dummy variables. These second-level regressions produce coefficients that are similar to the difference in the mean of each period, but with additional noise reduction since only variability that can be explained by the difference in period is preserved.
The effects of behavior variables on activation or FC were evaluated first within each behavior period. The behavior variables were collected into the n x p independent variable matrix X (n = number of observations; p = number of behavior variables, up to 9), and brain data were collected into the n x m dependent variable matrix Y (n = number of observations; m = number of nodes, 32, or correlation pairs, 496). Each observation consisted of a single time point in the activation regressions and a single sliding window (spanning 1 s) in the FC regressions. Observations were concatenated within an animal across all occurrences of a behavior period across both motorized and spontaneous conditions so that a single regression was performed for each period per mouse.
The regression was performed as:
in which Y0 and X0 are Y and X normalized within each variable, respectively, BPLS is the matrix of normalized regression slopes calculated by PLSR (p x m) and E is the matrix of residuals of the brain data (n x m). Diagrams of the regression equations are provided in Supplementary Fig. 12A.
In some video frames, some behavior variables could not be extracted with DeepLabCut due to obstruction or ambiguous image features. As PLSR cannot directly incorporate missing values, trimmed score regression (TSR) was used to estimate the missing parameters using the available behavior variables (speed, acceleration rate, FL, etc.) and brain data104. This method preserves the correlation structure of the data104,105,106. TSR was run using the MATLAB function plsmbtsr1104 with a number of principal components that explained at least 85% of the variability of the combined matrix M = [X0, Y0], within a maximum of 9, which is the number of behavior variables used. A minimum convergence of 1 × 10−9, a tolerance of 100, and 50 maximum iterations were used.
To determine the number of PLSR components that provided the best prediction of Y0 from X0, each regression was performed with up to 9 components, with 10-fold cross-validation and 10 Monte Carlo repetitions. Cross validation was performed on random subsets of observations that were contiguous in time. The cross-validated mean squared error (MSE) for the dependent variables was calculated for each possible number of PLSR components, and the Bayes Information Criterion (BIC)107 was applied. The model that produced the lowest BIC-adjusted MSE was interpreted as the model that best explained the covariance between Y0 and X0, and the number of components in the model was used in further analysis steps. The optimal number of components was found for each mouse and behavior period. Across regressions, an average of 1.42 ± 0.79 components were required to predict fluorescence activation, while 1.33 ± 0.61 components were required to predict FC (mean ± SEM across mice). The result of these regressions, BPLS, is a matrix of regression slopes conceptually equivalent to those produced by multiple linear regression. BPLS was then un-normalized to represent the ΔF/F% or Δ r (Badj) using:
where σX and σY are vectors containing the standard deviations of each variable in X and Y, respectively. Badj matrices were averaged across mice for display in Supplementary Figs. 7 and 8.
The predicted effects of the behavior variables were then removed from the brain data by predicting brain values when each behavior variable is equal to 0 (or 70% of maximum diameter in the case of pupil diameter). This was calculated as:
where Xzero is the matrix of behavior variables set to 0, μY is the vector containing the means of each variable in Y, and E is the matrix of residuals from equation). The minimum and maximum variability of the brain data explained by each behavior variable was estimated for each behavior period and data type (Supplementary Fig. 6). The maximum estimate was calculated as the percent variability explained when only the given variable is used to predict the brain data. The minimum estimate reflects the unique variability explained by each variable and was calculated by omitting the variable of interest and using all other behavior variables to predict the brain data. Each prediction used PLSR as described above. Conversely, the total percent variability of the behavior variables explained by the brain data with our PLSR model is given as an average across mice in Table 3.
Categorical regressions (also called Partial Least Squares Discriminant Analysis) were then performed across behavior periods within individuals. In these regressions, X was a n x 2 matrix of dummy variables (1, 0 or 0, 1) identifying each observation as belonging to one behavior period or the other, again normalized by column (Supplementary Fig. 12B). Regressions were performed as above, but with a maximum of 2 possible PLSR components and with the additional step of stratifying the cross validation so that each training and test subset of the data contained a ratio of each behavior period equal to the original dataset. Data was averaged across hemispheres before categorical regressions. All categorical regressions required 1 component. The resulting Badj matrices were then averaged across mice.
Relationship between change in activation and change in FC
The relationship between the PLSR-calculated changes in activation and FC was determined by calculating the correlation between these two measures as they change across behavior periods. For each node, changes in activation and FC were correlated across all the investigated categorical comparisons for each node.
Statistics
All statistics were performed with random permutation tests. Null distributions were generated within each animal, then averaged across animals to create a single null distribution. P-values were then calculated with a two-tailed z-test using the MATLAB Statistics and Machine Learning Toolbox function ztest (α = 0.05) and adjusted for multiple comparisons with the Benjamini-Hochberg false discovery rate post-hoc correction method108. Critical p-values for each test are provided in a source data file accompanying this paper. One thousand permutations were used for the PLSR regressions while 5000 permutations were used for the correlation between activation and FC.
Reporting summary
Further information on research design is available in the Nature Portfolio Reporting Summary linked to this article.
Data availability
Due to the large size, data generated and analyzed in this study are available from the authors upon request. Source data of figures are provided with this paper. Source data are provided with this paper.
Code availability
Code used in these analyzes is available in GitHub repository: https://github.com/west0883/calcium_imaging_of_externally_and_internally_driven_locomotion109.
References
Debaere, F., Wenderoth, N., Sunaert, S., Van, H. P. & Swinnen, S. P. Internal vs external generation of movements: differential neural pathways involved in bimanual coordination performed in the presence or absence of augmented visual feedback. Neuroimage 19, 764–776 (2003).
Fried, I., Mukamel, R. & Kreiman, G. Internally generated preactivation of single neurons in human medial frontal cortex predicts volition. Neuron 69, 548–562 (2011).
Lau, H. C., Rogers, R. D., Haggard, P. & Passingham, R. E. Attention to intention. Science 303, 1208–1210 (2004).
Halsband, U., Matsuzaka, Y. & Tanji, J. Neuronal activity in the primate supplementary, pre-supplementary and premotor cortex during externally and internally instructed sequential movements. Neurosci. Res 20, 149–155 (1994).
Shima, K. & Tanji, J. Neuronal activity in the supplementary and presupplementary motor areas for temporal organization of multiple movements. J. Neurophysiol. 84, 2148–2160 (2000).
Kornhuber, H. H. & Deecke, L. Changes in the brain potential in voluntary movements and passive movements in man: readiness potential and reafferent potentials. Pflug. Arch. Gesamt. Physiol. Menschen Tiere 284, 1–17 (1965).
Haggard, P. Human volition: towards a neuroscience of will. Nat. Rev. Neurosci. 9, 934–946 (2008).
Haggard, P. The neurocognitive bases of human volition. Annu. Rev. Psychol. 70, 9–28 (2019).
Passingham, R. E. Two cortical systems for directing movement. Ciba Found. Symp. 132, 151–164 (1987).
Passingham, R. E. The frontal lobes and voluntary action., (Oxford University Press, 1993).
Desmurget, M. & Sirigu, A. A parietal-premotor network for movement intention and motor awareness. Trends Cogn. Sci. 13, 411–419 (2009).
Kuang, S., Morel, P. & Gail, A. Planning movements in visual and physical space in monkey posterior parietal cortex. Cereb. Cortex 26, 731–747 (2016).
Goodale, M. A. & Milner, A. D. Separate visual pathways for perception and action. Trends Neurosci. 15, 20–25 (1992).
Stepniewska, I. & Kaas, J. H. The dorsal stream of visual processing and action-specific domains in parietal and frontal cortex in primates. J. Comp. Neurol. 531, 1897–1908 (2023).
Andersen, R. A. & Buneo, C. A. Intentional maps in posterior parietal cortex. Annu Rev. Neurosci. 25, 189–220 (2002).
Boussaoud, D. & Wise, S. P. Primate frontal cortex: neuronal activity following attentional versus intentional cues. Exp. Brain Res 95, 15–27 (1993).
Shenoy, K. V. et al. Neural prosthetic control signals from plan activity. Neuroreport 14, 591–596 (2003).
Thura, D. & Cisek, P. Deliberation and commitment in the premotor and primary motor cortex during dynamic decision making. Neuron 81, 1401–1416 (2014).
Gerloff, C. et al. Functional coupling and regional activation of human cortical motor areas during simple, internally paced and externally paced finger movements. Brain 121, 1513–1531 (1998).
Gallivan, J. P. & Culham, J. C. Neural coding within human brain areas involved in actions. Curr. Opin. Neurobiol. 33, 141–149 (2015).
Ariani, G., Wurm, M. F. & Lingnau, A. Decoding internally and externally driven movement plans. J. Neurosci. 35, 14160–14171 (2015).
Hoshi, E. & Tanji, J. Differential roles of neuronal activity in the supplementary and presupplementary motor areas: from information retrieval to motor planning and execution. J. Neurophysiol. 92, 3482–3499 (2004).
Hartstra, E., Waszak, F. & Brass, M. The implementation of verbal instructions: dissociating motor preparation from the formation of stimulus-response associations. Neuroimage 63, 1143–1153 (2012).
Tanji, J. The supplementary motor area in the cerebral cortex. Neurosci. Res 19, 251–268 (1994).
Shima, K., Mushiake, H., Saito, N. & Tanji, J. Role for cells in the presupplementary motor area in updating motor plans. Proc. Natl Acad. Sci. USA 93, 8694–8698 (1996).
Beloozerova, I. N., Nilaweera, W. U., Viana Di Prisco, G. & Marlinski, V. Signals from posterior parietal area 5 to motor cortex during locomotion. Cereb. Cortex 33, 1014–1043 (2023).
Andujar, J. E., Lajoie, K. & Drew, T. A contribution of area 5 of the posterior parietal cortex to the planning of visually guided locomotion: limb-specific and limb-independent effects. J. Neurophysiol. 103, 986–1006 (2010).
Pesaran, B., Nelson, M. J. & Andersen, R. A. Free choice activates a decision circuit between frontal and parietal cortex. Nature 453, 406–409 (2008).
Sirigu, A. et al. Altered awareness of voluntary action after damage to the parietal cortex. Nat. Neurosci. 7, 80–84 (2004).
West, S. L. et al. Wide-field calcium imaging of dynamic cortical networks during locomotion. Cereb. Cortex 32, 2668–2687 (2022).
Yang, J. H. & Kwan, A. C. Secondary motor cortex: broadcasting and biasing animal’s decisions through long-range circuits. Int Rev. Neurobiol. 158, 443–470 (2021).
Barthas, F. & Kwan, A. C. Secondary motor cortex: where ‘sensory’ meets ‘motor’ in the rodent frontal cortex. Trends Neurosci. 40, 181–193 (2017).
Jacobs, J. V., Lou, J. S., Kraakevik, J. A. & Horak, F. B. The supplementary motor area contributes to the timing of the anticipatory postural adjustment during step initiation in participants with and without Parkinson’s disease. Neuroscience 164, 877–885 (2009).
Pozzi, N. G. et al. Freezing of gait in Parkinson’s disease reflects a sudden derangement of locomotor network dynamics. Brain 142, 2037–2050 (2019).
Snijders, A. H. et al. Clinimetrics of freezing of gait. Mov. Disord. 23, S468–S474 (2008).
Yang, W., Tipparaju, S. L., Chen, G. & Li, N. Thalamus-driven functional populations in frontal cortex support decision-making. Nat. Neurosci. 25, 1339–1352 (2022).
Inagaki, H. K., Inagaki, M., Romani, S. & Svoboda, K. Low-dimensional and monotonic preparatory activity in mouse anterior lateral motor cortex. J. Neurosci. 38, 4163–4185 (2018).
Shimaoka, D., Harris, K. D. & Carandini, M. Effects of arousal on mouse sensory cortex depend on modality. Cell Rep. 22, 3160–3167 (2018).
Vinck, M., Batista-Brito, R., Knoblich, U. & Cardin, J. A. Arousal and locomotion make distinct contributions to cortical activity patterns and visual encoding. Neuron 86, 740–754 (2015).
Goard, M. J., Pho, G. N., Woodson, J. & Sur, M. Distinct roles of visual, parietal, and frontal motor cortices in memory-guided sensorimotor decisions. Elife 5, e13764 (2016).
Zareian, B., Zhang, Z. & Zagha, E. Cortical localization of the sensory-motor transformation in a whisker detection task in mice. eNeuro 8, ENEURO.0004–21.2021 (2021).
Niell, C. M. & Stryker, M. P. Modulation of visual responses by behavioral state in mouse visual cortex. Neuron 65, 472–479 (2010).
Clancy, K. B., Orsolic, I. & Mrsic-Flogel, T. D. Locomotion-dependent remapping of distributed cortical networks. Nat. Neurosci. 22, 778–786 (2019).
Heindorf, M. & Keller, G. B. Reduction of layer 5 mediated long-range cortical communication by antipsychotic drugs. bioRxiv, 2022.2001.2031.478462. https://doi.org/10.1101/2022.01.31.478462 (2022).
Stringer, C. et al. Spontaneous behaviors drive multidimensional, brainwide activity. Science 364, 255 (2019).
Nakai, N. et al. Virtual reality-based real-time imaging reveals abnormal cortical dynamics during behavioral transitions in a mouse model of autism. Cell Rep. 42, 112258 (2023).
Beloozerova, I. N. & Sirota, M. G. Integration of motor and visual information in the parietal area 5 during locomotion. J. Neurophysiol. 90, 961–971 (2003).
Beloozerova, I. N. et al. Activity of different classes of neurons of the motor cortex during postural corrections. J. Neurosci. 23, 7844–7853 (2003).
Drew, T. Motor cortical cell discharge during voluntary gait modification. Brain Res 457, 181–187 (1988).
Stout, E. E., Sirota, M. G. & Beloozerova, I. N. Known and unexpected constraints evoke different kinematic, muscle, and motor cortical neuron responses during locomotion. Eur. J. Neurosci. 42, 2666–2677 (2015).
Lajoie, K., Andujar, J. E., Pearson, K. & Drew, T. Neurons in area 5 of the posterior parietal cortex in the cat contribute to interlimb coordination during visually guided locomotion: a role in working memory. J. Neurophysiol. 103, 2234–2254 (2010).
Marigold, D. S., Andujar, J. E., Lajoie, K. & Drew, T. Motor planning of locomotor adaptations on the basis of vision: The rold of the posterior parietal cortex. Elsevier Prog. Brian Res. 188, 83–100 (2011).
Marigold, D. S. & Drew, T. Contribution of cells in the posterior parietal cortex to the planning of visually guided locomotion in the cat: effects of temporary visual interruption. J. Neurophysiol. 105, 2457–2470 (2011).
Marigold, D. S. & Drew, T. Posterior parietal cortex estimates the relationship between object and body location during locomotion. Elife 6, e28143 (2017).
Ayaz, A., Saleem, A. B., Schölvinck, M. L. & Carandini, M. Locomotion controls spatial integration in mouse visual cortex. Curr. Biol. 23, 890–894 (2013).
Ayaz, A., Stäuble, A., Saleem, A. B. & Helmchen, F. Layer-specific integration of locomotion and concurrent wall touching in mouse barrel cortex. bioRxiv, 265165 https://doi.org/10.1101/265165 (2018).
Favorov, O. V., Nilaweera, W. U., Miasnikov, A. A. & Beloozerova, I. N. Activity of somatosensory-responsive neurons in high subdivisions of SI cortex during locomotion. J. Neurosci. 35, 7763–7776 (2015).
Saleem, A. B., Ayaz, A., Jeffery, K. J., Harris, K. D. & Carandini, M. Integration of visual motion and locomotion in mouse visual cortex. Nat. Neurosci. 16, 1864–1869 (2013).
Nakajima, T., Fortier-Lebel, N. & Drew, T. A secondary motor area contributing to interlimb coordination during visually guided locomotion in the cat. Cereb. Cortex 33, 290–315 (2022).
Koenraadt, K. L., Roelofsen, E. G., Duysens, J. & Keijsers, N. L. Cortical control of normal gait and precision stepping: an fNIRS study. Neuroimage 85, 415–422 (2014).
Suzuki, M. et al. Prefrontal and premotor cortices are involved in adapting walking and running speed on the treadmill: an optical imaging study. Neuroimage 23, 1020–1026 (2004).
Tsuru, D. et al. The effects of transcranial static magnetic fields stimulation over the supplementary motor area on anticipatory postural adjustments. Neurosci. Lett. 723, 134863 (2020).
Allen, W. E. et al. Global representations of goal-directed behavior in distinct cell types of mouse neocortex. Neuron 94, 891–907.e896 (2017).
Makino, H. et al. Transformation of cortex-wide emergent properties during motor learning. Neuron 94, 880–890.e888 (2017).
Nelson, A. & Mooney, R. The basal forebrain and motor cortex provide convergent yet distinct movement-related inputs to the auditory cortex. Neuron 90, 635–648 (2016).
Schneider, D. M., Nelson, A. & Mooney, R. A synaptic and circuit basis for corollary discharge in the auditory cortex. Nature 513, 189–194 (2014).
Takeuchi, R. F., Ito, K. N., Ueda, R., Yamaguchi, M. & Osakada, F. Posteromedial cortical networks encode visuomotor prediction errors. bioRxiv, 2022.2008.2016.504075. https://doi.org/10.1101/2022.08.16.504075 (2022).
Leinweber, M., Ward, D. R., Sobczak, J. M., Attinger, A. & Keller, G. B. A sensorimotor circuit in mouse cortex for visual flow predictions. Neuron 95, 1420–1432.e1425 (2017).
Kilavik, B. E., Zaepffel, M., Brovelli, A., MacKay, W. A. & Riehle, A. The ups and downs of β oscillations in sensorimotor cortex. Exp. Neurol. 245, 15–26 (2013).
Gold, J. I. & Shadlen, M. N. The neural basis of decision making. Annu Rev. Neurosci. 30, 535–574 (2007).
Mitelut, C. et al. Mesoscale cortex-wide neural dynamics predict self-initiated actions in mice several seconds prior to movement. Elife 11, e76506 (2022).
Pinto, L. et al. Task-dependent changes in the large-scale dynamics and necessity of cortical regions. Neuron 104, 810–824.e819 (2019).
Quarta, E. et al. Distributed and localized dynamics emerge in the mouse neocortex during reach-to-grasp behavior. J. Neurosci. 42, 777–788 (2022).
Steinmetz, N. A., Zatka-Haas, P., Carandini, M. & Harris, K. D. Distributed coding of choice, action and engagement across the mouse brain. Nature 576, 266–273 (2019).
Li, N., Daie, K., Svoboda, K. & Druckmann, S. Robust neuronal dynamics in premotor cortex during motor planning. Nature 532, 459–464 (2016).
Adam, E. M., Johns, T. & Sur, M. Dynamic control of visually guided locomotion through corticosubthalamic projections. Cell Rep. 40, 111139 (2022).
Swann, N. et al. Intracranial EEG reveals a time- and frequency-specific role for the right inferior frontal gyrus and primary motor cortex in stopping initiated responses. J. Neurosci. 29, 12675–12685 (2009).
Wagner, J., Makeig, S., Gola, M., Neuper, C. & Müller-Putz, G. Distinct β band oscillatory networks subserving motor and cognitive control during gait adaptation. J. Neurosci. 36, 2212–2226 (2016).
Drew, T. & Marigold, D. S. Taking the next step: cortical contributions to the control of locomotion. Curr. Opin. Neurobiol. 33, 25–33 (2015).
Nakajima, T., Fortier-Lebel, N. & Drew, T. Premotor cortex provides a substrate for the temporal transformation of information during the planning of gait modifications. Cereb. Cortex 29, 4982–5008 (2019).
Mohan, H. et al. Cortical glutamatergic projection neuron types contribute to distinct functional subnetworks. Nat. Neurosci. 26, 481–494 (2023).
Musall, S. et al. Pyramidal cell types drive functionally distinct cortical activity patterns during decision-making. Nat. Neurosci. 26, 495–505 (2023).
Roerdink, M. et al. Rhythm perturbations in acoustically paced treadmill walking after stroke. Neurorehabil Neural Repair 23, 668–678 (2009).
Benisty, H. et al. Rapid fluctuations in functional connectivity of cortical networks encode spontaneous behavior. Nat. Neurosci. 27, 148–158 (2024).
Ebbesen, C. L. et al. More than Just a “Motor”: recent surprises from the frontal cortex. J. Neurosci. 38, 9402–9413 (2018).
Chen, T. W., Li, N., Daie, K. & Svoboda, K. A map of anticipatory activity in mouse motor cortex. Neuron 94, 866–879 (2017).
Chen, T.-W. et al. Ultrasensitive fluorescent proteins for imaging neuronal activity. Nature 499, 295–300 (2013).
Dana, H. et al. Thy1-GCaMP6 transgenic mice for neuronal population imaging in vivo. PLoS One 9, e108697 (2014).
Waters, J. Sources of widefield fluorescence from the brain. Elife 9, e59841 (2020).
Peters, A. J., Fabre, J. M. J., Steinmetz, N. A., Harris, K. D. & Carandini, M. Striatal activity topographically reflects cortical activity. Nature 591, 420–425 (2021).
Ghanbari, L. et al. Cortex-wide neural interfacing via transparent polymer skulls. Nat. Commun. 10, 1500 (2019).
Cramer, S. W. et al. Wide-field calcium imaging reveals widespread changes in cortical functional connectivity following mild traumatic brain injury in the mouse. Neurobiol. Dis. 176, 105943 (2023).
Nietz, A. K. et al. To be and not to be: wide-field Ca2+ imaging reveals neocortical functional segmentation combines stability and flexibility. Cereb. Cortex 33, 6543–6558 (2023).
Wang, Q. et al. The allen mouse brain common coordinate framework: a 3D Reference Atlas. Cell 181, 936–953.e920 (2020).
Grothe, B. & Pecka, M. The natural history of sound localization in mammals–a story of neuronal inhibition. Front Neural Circuits 8, 116 (2014).
Guizar-Sicairos, M., Thurman, S. T. & Fienup, J. R. Efficient subpixel image registration algorithms. Opt. Lett. 33, 156–158 (2008).
Halko, N., Martinsson, P.-G., Shkolnisky, Y. & Tygert, M. An algorithm for the principal component analysis of large data sets. ArXiv abs/1007.5510 (2010).
Mathis, A. et al. DeepLabCut: markerless pose estimation of user-defined body parts with deep learning. Nat. Neurosci. 21, 1281–1289 (2018).
Asuero, A. G., Sayago, A. & González, A. G. The correlation coefficient: an overview. Crit. Rev. Anal. Chem. 36, 41–59 (2006).
Berry, K. J. & Mielke, P. W. Jr A monte carlo investigation of the fisher Z transformation for normal and nonnormal distributions. Psychol. Rep. 87, 1101–1114 (2000).
de Jong, S. SIMPLS: an alternative approach to partial least squares regression. Chemometrics Intell. Lab. Syst. 18, 251–263 (1993).
Krishnan, A., Williams, L. J., McIntosh, A. R. & Abdi, H. Partial least squares (PLS) methods for neuroimaging: a tutorial and review. Neuroimage 56, 455–475 (2011).
Scott, E. R. & Crone, E. E. Using the right tool for the job: the difference between unsupervised and supervised analyses of multivariate ecological data. Oecologia 196, 13–25 (2021).
Folch-Fortuny, A., Arteaga, F. & Ferrer, A. PLS model building with missing data: New algorithms and a comparative study. J. Chemometrics 31, e2897 (2017).
Folch-Fortuny, A., Arteaga, F. & Ferrer, A. PCA model building with missing data: New proposals and a comparative study. Chemometrics Intell. Lab. Syst. 146, 77–88 (2015).
Folch-Fortuny, A., Villaverde, A. F., Ferrer, A. & Banga, J. R. Enabling network inference methods to handle missing data and outliers. BMC Bioinforma. 16, 283 (2015).
Akaike, H. in Selected Papers of Hirotugu Akaike (eds E. Parzen, K. Tanabe, & G. Kitagawa) 199-213 (Springer New York, 1998).
Genovese, C. R., Lazar, N. A. & Nichols, T. Thresholding of statistical maps in functional neuroimaging using the false discovery rate. Neuroimage 15, 870–878 (2002).
West S. L., Gerhart G., Ebner T. J. Wide-field calcium imaging of cortical activation and functional connectivity in externally- and internally-driven locomotion. west0883/calcium_imaging_of_externally_and_internally_driven_locomotion. https://doi.org/10.5281/zenodo.12688490 (2024).
Acknowledgements
We would like to thank Lijuan Zhuo for her assistance in animal surgeries. The Minnesota Supercomputing Institute provided high-processing computing, and the University of Minnesota University Imaging Centers (UIC, SCR_020997) provided 3D printing services to generate the cortical implants. This work was supported by National Institutes of Health (R01-NS111028 to T.J. E., P30-DA048742 to T.J.E., and T32-MH115688 to S.L.W., as well as by a grant from University of Minnesota Informatics Institute, which includes support from the University of Minnesota’s MnDRIVE Initiative (to S.L.W).
Author information
Authors and Affiliations
Contributions
S.L.W. developed the experimental design and hardware required, performed experiments, led the analyzes and writing of the manuscript. M.L.G. performed experiments and data collection. T.J.E. was involved with oversight of the project, the experimental design, reviewing the results, writing of the manuscript as well as securing funding for project.
Corresponding author
Ethics declarations
Competing interests
The authors declare no competing interests.
Peer review
Peer review information
Nature Communications thanks Paul Dean and the other, anonymous, reviewer(s) for their contribution to the peer review of this work. A peer review file is available.
Additional information
Publisher’s note Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Supplementary information
Source data
Rights and permissions
Open Access This article is licensed under a Creative Commons Attribution-NonCommercial-NoDerivatives 4.0 International License, which permits any non-commercial use, sharing, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons licence, and indicate if you modified the licensed material. You do not have permission under this licence to share adapted material derived from this article or parts of it. The images or other third party material in this article are included in the article’s Creative Commons licence, unless indicated otherwise in a credit line to the material. If material is not included in the article’s Creative Commons licence and your intended use is not permitted by statutory regulation or exceeds the permitted use, you will need to obtain permission directly from the copyright holder. To view a copy of this licence, visit http://creativecommons.org/licenses/by-nc-nd/4.0/.
About this article

Cite this article
West, S.L., Gerhart, M.L. & Ebner, T.J. Wide-field calcium imaging of cortical activation and functional connectivity in externally- and internally-driven locomotion. Nat Commun 15, 7792 (2024). https://doi.org/10.1038/s41467-024-51816-6
Received:
Accepted:
Published:
DOI: https://doi.org/10.1038/s41467-024-51816-6
