
Abstract
The sensory nervous system in animals enables the perception of external stimuli. Developing an artificial sensory nervous system has been widely conducted to realize neuro-inspired robots capable of effectively responding to external stimuli. However, it remains challenging to develop artificial sensory nervous systems that possess sophisticated biological functions, such as habituation and sensitization, enabling efficient responses without bulky peripheral circuitry. Here, we introduce a memristor device with third-order switching complexity, emulating an artificial synapse that inherently possesses habituation and sensitization properties. Incorporating an additional resistive switching TiOx layer into the HfO2 memristor exhibits third-order switching complexity and non-volatile habituation characteristics. Based on the third-order memristor, we propose a robotic system equipped with a memristor-based artificial sensory nervous system for optimizing the robot arm’s response to external stimuli without the aid of processors. It is experimentally demonstrated that the robot arm with the developed memristor-based artificial sensory nervous system ignores approximately 71% of safe and familiar stimuli while sensitively responding to threatening and significant stimuli, similar to the habituation and sensitization of biological sensory nervous systems. Our findings can be a stepping stone for energy-efficient and intelligent robotic systems with reduced hardware burden.
Similar content being viewed by others
Introduction
Animals, including cats, birds, and humans, instinctively adapt their responses to external stimuli based on their surrounding environment or previously learned information. For instance, a dog accustomed to wearing clothes may not react to the tactile stimulus of the fabric, having learned that it is not harmful. Similarly, a newborn baby might initially startle at the sound of a refrigerator, but the baby becomes desensitized after learning that the noise is not a threat. These adjustments in response to stimuli occur unconsciously, facilitated by the sensory nervous system (SNS) in animals1,2.
The SNS receives external stimuli, converts them into electrical signals, and transmits these signals to the central nervous system. This process enables animals to perceive their surroundings. The SNS is essential for survival, as it not only detects external stimuli but also promptly processes information, facilitating rapid responses without direct involvement from the central nervous system. For example, the SNS modulates sensitivity to specific stimuli, influencing the intensity of an animal’s reaction to them. One of these synaptic modulations, called habituation, is achieved by reducing the synaptic strength of involved neurons, resulting in a decreased response. Habituation enables animals to disregard familiar and non-threatening signals3,4,5,6,7,8. On the contrary, an increase in synaptic strength, known as sensitization (or dishabituation if it reverses the effects of prior habituation)5, amplifies responses. This makes animals more responsive to potentially threatening and significant stimuli. Therefore, habituation and sensitization serve as crucial functions for survival, conserving energy by filtering out irrelevant responses to harmless stimuli and enabling animals to concentrate on responding to significant signals.
Unlike animals with biological SNS, robotic systems receiving various external stimuli from the environment are overwhelmed by the vast data generated by sensors, given the limited performance of their processors. Implementing biological SNS functions, such as habituation and sensitization to filter out insignificant stimuli at the edge levels, has been considered an effective solution to reduce the burden on processors from the vast amount of data. Inspired by the efficiency of the biological SNS, there has been a surge of interest in developing robotic systems that mimic these functions. To implement the habituation and sensitization in robots, an artificial sensory nervous system (ASNS) had been developed based on complementary-metal-oxide-semiconductor (CMOS) circuitries9,10,11. The CMOS-based ASNS accurately emulates the habituation and sensitization of the biological SNS, however, it requires a large area for implementing the CMOS circuitry and consumes much higher energy compared to the biological SNS, which limits the realization of robotic systems with habituation and sensitization.
Instead of the CMOS-based ASNS, memristors have attracted attention as a breakthrough for neuro-inspired robotics12,13,14,15,16,17,18,19,20,21,22. A memristor, an emerging two-terminal non-volatile memory device, stores analog information by forming or rupturing an internal conductive filament, resulting in changes in device resistance between a high resistance state (HRS) and low resistance state (LRS)23,24,25,26. Based on the analog memory property, fast speed, high scalability, and structural simplicity, the memristor has been utilized as an energy-efficient artificial synapse device in various fields such as neuromorphic computing or neuro-inspired robotics.
Utilizing the analog synaptic properties of the memristor, several memristor-based artificial sensory nervous systems (MASNSs) have replicated key functions of the biological SNS. These functions include long-term potentiation and depression (LTP and LTD, respectively), spike-time-dependent plasticity (STDP), synaptic adaptation, and associative learning12,15,18. Despite these advancements, the practical implementation of a robotic MASNS exhibiting both habituation and sensitization capabilities has not yet been experimentally demonstrated. This gap is attributed to the resistive switching in memristors, which is typically governed by one or two state variables, resulting in a simplistic switching behavior insufficient for replicating more complex functions such as habituation and sensitization27. Therefore, developing a memristor that not only offers non-volatile SNS functionalities—such as habituation and sensitization—but also meets high performance standards is crucial for the advancement of efficient robotic systems equipped with MASNS.
In this study, we emulated the complex behavior of a biological synapse such as habituation, sensitization, and frequency-dependent plasticity with the developed third-order memristor having three state variables (filament diameter, device temperature, and TiOx conductivity). The developed memristor also exhibited high performance of HfO2-based memristors such as non-volatile memory, good analog property, and low variations. By utilizing the third-order memristor, we developed a robot arm system with a MASNS. This system is capable of sensing tactile and electric shock stimuli. It suppresses responses to non-threatening stimulus, while specifically reacting to dangerous electric shock stimuli. Based on the habituation and sensitization characteristics of the third-order memristor, the MASNS-implemented robot arm showed efficient response to external stimuli by ignoring approximately 71% of safe stimuli while responding to every identified threatening electric shock (harmful) stimulus. In contrast, conventional low-order (first- or second-order) memristor-based MASNS system have ignored only 0.2% of safe stimuli. Our results open up the possibility of an intelligent neuro-inspired robotic system that optimizes its responses to the environment without bulky processors, and therefore, can be utilized for energy-efficient robots operating in a power-limited environment or rescue robots which ignore unimportant stimuli for fast operations.
Results
Habituation and sensitization of a biological sensory nervous system
Habituation and sensitization are vital functions for the survival of animals, as they enable animals to focus only on significant stimuli and prevent the waste of energy on unnecessary responses to insignificant stimuli. Examples of habituation and sensitization are illustrated in Fig. 1a. For instance, when a mouse hears an unfamiliar twitter from a small bird, it will sensitively respond (e.g., by running away or hiding) because it does not know if the sound comes from predators. However, if the same twittering from the small bird is repeated without any threat, the mouse recognizes the twittering as safe and no longer pays attention to it. This process is called habituation, and it is the result of synaptic modulations in the SNS of the mouse; for example, the synaptic strengths of some synapses related to the twittering are reduced as the safe twittering is repeated, and the neurons will be less activated. Consequently, by ignoring the twittering, the mouse saves time and energy that would otherwise be wasted for running away.

a Illustrations of habituation and sensitization. b The change of the response intensity and the synaptic strength according to the applied stimulus. The enhancement of the synaptic connection induces sensitization while the reduction of the synaptic strength induces habituation. c The MASNS and the biological SNS. In the MASNS, the conductance of the memristor determines the synaptic strength between the pre-synaptic and post-synaptic neurons. d The conductance update curve of memristors for MASNS (blue) compared to conventional low-order memristors (red).
On the contrary, if the mouse, having already undergone habituation, encounters an owl twittering similar to that of the little bird, it initially ignores the twittering due to the habituation. However, after the owl repeatedly attacks the mouse, the mouse sensitively responds to the twittering, even if it comes from the safe little bird. The enhanced sensitivity to specific stimuli allows the mouse to sensitively respond to threats and survive from predators. This process is called sensitization (or dishabituation when habituation precedes it), resulting from the enhancement of related synaptic connections. The response intensity and synaptic strength regarding specific stimuli can be illustrated as shown in Fig. 1b. The habituation occurs when a stimulus (e.g., tactile) is repeatedly received without threats (e.g., pain). Sensitization, on the contrary, occurs when the stimulus is accompanied by threats, and both habituation and sensitization are the results of synaptic strength modulation in the SNS.
To realize an ASNS in a robotic system, memristors have been widely utilized as artificial synapses of the ASNS in robots. A diagram of the MASNS is illustrated in Fig. 1c. A pre-synaptic neuron senses stimuli and transfers signals to the memristor, the memristor passes different outputs depending on its conductivity (synaptic strength), and the post-synaptic neuron makes locomotion of the robot if the signal from the memristor exceeds a threshold20. Realistically mimicking the functions of the biological SNS requires memristors capable of replicating the complex characteristics of biological synapses.
For habituation function, the conductance needs to initially increase, and then decrease after a few initial set pulses (blue line of Fig. 1d). However, only one or two state variables, a filament diameter and device temperature, have been demonstrated for several non-volatile memristors including oxide-based memristors and metal cation-based memristors27,28,29,30,31. These low-order memristors have been hardly used for implementing the habituation of the biological SNS, because the device conductance usually monotonically increases with set pulses (red line of Fig.1d and Supplementary Fig. S1). Furthermore, the habituation state needs to be stably maintained (non-volatile) for a long time, even after the applied pulses are withheld for a while (see Supplementary Fig. S2). Therefore, a new type of memristor with third-order dynamics, implying a device with another state variable beyond the filament diameter and the device temperature, is required to imitate those complex behaviors of biological synapses (see Supplementary Fig. S3).
Third-order and CMOS-compatible HfO2 memristor
Similar to other filamentary memristors, HfO2 memristors modulate the device conductance by controlling the internal conductive oxygen vacancy-based filament32,33,34. Various HfO2 memristors have demonstrated favorable characteristics for analog artificial synapses, including high endurance, fast speed, high yield, and good uniformity25,32,35,36,37. However, only first- or second-order switching (state variable: filament diameter and the device temperature) has been demonstrated for HfO2 memristors28, whereas third-order switching has not been explored yet.
To develop a higher-order HfO2-based memristor with good switching performances, an additional conductive TiOx layer is inserted in the HfO2 memristor. Because of the high reactivity of the titanium to the oxygen, we confirmed that the resistive switching TiOx layer is formed between the Ti and HfO2 layers during the back-end-of-line (BEOL) fabrication process. The fully CMOS-compatible third-order memristor having TiN/Ti/TiOx/HfO2/TiN stack is fabricated on an 8-inch wafer as shown in Fig. 2a–c and Supplementary Fig. S4. More detailed information about the device fabrication is in the Methods section. The fabricated HfO2 memristor exhibited favorable operation characteristics with stable retention, fast switching speed, low switching variations, and good endurance (Supplementary Fig. S5, S6, and Supplementary Table S1). Furthermore, the high yield within 8-inch large-scale CMOS-compatible fabrication (Supplementary Figs. S7 and S8) and high thermal stability in elevated temperatures (Supplementary Fig. S9) enable integration of the device with sensor arrays and make the device suitable for reliable robotic applications in various environments.

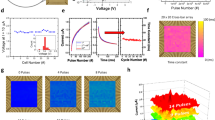
a The schematic of the fabricated third-order memristor and the state variables. Three state variables: filament diameter, device temperature, and TiOx conductivity. b TEM image of the third-order memristor. c The EDS line-scan results of the third-order memristor confirming that the TiOx layer between the Ti and HfO2 layer for another state variable. d The conductance update curve of the third-order memristor during consecutive 100 positive voltage pulses followed by 100 negative voltage pulses. After the sensitization has occurred for the first two positive set voltage pulses, the habituation (decrease of the conductance) is observed during the set pulses. The negative reset voltage pulses initialize the device and reduce the device conductance into the HRS. The conductance state is read by a read pulse (0.3 V and 50 μs) after each set and reset pulse. e Illustrations of the third-order memristor during the voltage pulses and the corresponding conductance states.
To understand the third-order resistive switching behavior based on the device structure, transmission electron microscopy (TEM) imaging, electron dispersion spectroscopy (EDS), X-ray photoelectron spectroscopy (XPS) results were obtained, as shown in Figs. 2b, c, and Supplementary Fig. S10. The TEM image in Fig. 2b shows metal-insulator-metal structure of the fabricated device, where the device consists of CMOS-compatible materials including the TiN, HfO2, or Ti. It is noted that the device is fabricated in fully CMOS-compatible environments, which enables the monolithic integration of the device to various CMOS peripheral circuitries. The EDS line scan results, as shown in Fig. 2c, show the Ti/TiOx/HfO2 stack with an oxidized Ti-HfO2 interface between the TiN electrodes. The initial stoichiometry of the TiOx layer is close to TiO, as demonstrated by the XPS results (see Supplementary Fig. S10).
The fabricated device possesses at least three state variables, including not only the filament diameter and device temperature in HfO2-based memristor but also the TiOx layer conductivity. In this device, the TiOx layer provides an additional state variable (resistive switching in the TiOx layer) compared to conventional oxide-based memristors, enabling third-order memristor behaviors. The filament diameter and TiOx conductance inversely affect the device’s total conductance in response to set pulses. The device without the TiOx layer exhibited typical monotonic conductance update curve of conventional low-order memristors, demonstrating that the TiOx layer is essential for habituation characteristics (see Supplementary Fig. S11).
When the device is in the HRS, the device conductance initially increases to the LRS (the state (1)–(2) of Fig. 2d, e) as set pulses are applied, since the redistributed oxygen anions from the HfO2 layer to the TiOx layer lead to an increase in the filament diameter. However, as more set pulses are applied, more oxygen anions are drifted to the TiOx layer. The redistributed oxygen anions change the initially conductive TiOx layer near the filament to an insulating TiOy region (the state (2)–(3) of Fig. 2d, e). The insulating TiOy region has higher resistance compared to the conductive TiOx layer, and therefore, the device conductance decreases to habituation state as set pulses are applied. The device conductance state can be programmed back into the HRS by applying strong negative bias reset pulses or back into the LRS by applying weak negative bias reset pulses (see Fig. 2d and Supplementary Fig. S12).
Conductance update curves of the device under various pulse conditions demonstrated that the third-order switching behavior requires a high amplitude or long width voltage pulse to relocate oxygen anions into the TiOx layer (Supplementary Fig. S13 and Supplementary Table S2). Furthermore, we investigated whether the habituation characteristics originate from the device’s resistive switching or the transient and parasitic effects, such as intrinsic capacitance or current overshoot. By analyzing the intrinsic capacitance of the device and varying the pulse interval to mitigate current overshoot, as shown in Supplementary Figs. S14 and S15, it was confirmed that the habituation characteristics arise from the resistive switching in the device, rather than from transient or parasitic effects.
There have been several attempts to emulate habituation characteristics using memristors16,38,39,40,41. For instance, memristors employing a unipolar reset process16 (such as filament rupture due to Joule heating) or circuits composed of volatile memory devices38,39,40,41 have exhibited habituation characteristics in response to repeated stimuli. However, these systems exhibited volatile habituation characteristics, indicating that the trained information was hardly maintained over time. In contrast to the volatile habituation characteristics, each state (state (1), (2), and (3) of Fig. 2d, e) of the third-order HfO2 memristor is not a transient conductance fluctuation, but is a non-volatile memory state, as shown in Supplementary Fig. S16. The stable and non-volatile habituation can be realized by implementing the third-state variable (TiOx conductivity), which provides a distinct non-volatile memory state (habituation) other than the HRS and LRS (see Fig. 2f).
The effect of the device temperature as a second state variable was also investigated in Supplementary Fig. S17 and S18. To demonstrate the impact of device temperature on conductance update, a consecutive 100 voltage pulse train with varying pulse intervals was applied to the third-order memristor. As shown in Supplementary Fig. S17, the habituation characteristic became evident as the pulse interval shortens, where a shorter pulse interval results in less heat dissipation between pulses, leading to an increase in device temperature. The elevated heat energy enhances the drift of the oxygen anions into the TiOx layer, forming the insulative TiOy. In addition, measurements at elevated temperatures revealed more pronounced and fast habituation characteristics, demonstrating the effects of the high temperature on resistive switching in the TiOx layer and habituation characteristics (see Supplementary Fig. S18). The results support the conclusion that the device temperature acts as a critical state variable in the developed third-order memristor.
It is noteworthy that there are some discrepancies between the habituation of the third-order memristor and that of biological synapses. While biological synapses exhibit spontaneous recovery due to short-term memory, the third-order memristor features non-volatile memory. The use of non-volatile memory involves a trade-off between synaptic weight stability and biological plausibility. The absence of short-term memory may limit the use of the third-order memristor for accurately emulating synaptic behaviors for synaptic learnings. However, reliable robotic applications often require learned information to persist for a long time or even when powered off, making non-volatile memory advantageous. Despite the absence of short-term memory, the third-order memristor demonstrated various synaptic behaviors associated with habituation, as shown in Supplementary Figs. S19, S20, and Supplementary Note S1. Furthermore, certain biological synaptic behaviors reliant on short-term memory, such as spontaneous recovery and potentiation of habituation, can be mimicked by periodically applying weak reset pulses, if necessary (see Supplementary Figs. S19g, S19h, and S20). Detailed comparisons of the third-order memristor with several devices emulating habituation, as presented in Supplementary Table S1, highlight its favorable electrical characteristics for reliable robotic applications, as well as ability to mimic various synaptic behaviors.
Operation principle of the third-order memristor
The switching mechanism in the third-order memristor is further supported by modeling the conductance update curves of the filament and the TiOx layer, respectively (see “Methods”). As shown in the Fig. 3a, the third-order memristor is modelled with two anti-serially connected resistive switching variables (representing the filament and TiOx layer, respectively). Based on the model, we obtained the total simulated output current and compared it to the experimental data (Fig. 3b–m). The typical LTP and LTD are obtained for the shorter set pulse widths (1 and 2 μs), while the habituation characteristic is observed for the longer set pulse widths (3 and 4 μs). It matches well with the experimental data of the third-order memristor. The identical non-monotonic conductance update curve from the model, which is hardly acquired in conventional low-order memristors, demonstrates that the habituation characteristics originate from the anti-serially connected resistive switching filament and TiOx layer.

a Illustrations of the conductance updates of the TiOx layer and filament in the third-order memristor. The TiOx layer and filament show opposite conductance update curves to the applied voltage pulse due to the anti-serially connected structure, which enables habituation characteristics. b–m Comparisons between the experimental data and the simulated results. By modelling the conductance update curves of the TiOx layer (red) and the filament (sky blue) respectively (c, f, i, l), the total simulated output currents of the third-order memristor with various set pulse widths are obtained (d, g, j, m). The total simulated output current exhibit the similar conductance update curves to the experimental data (b, e, h, k), demonstrating that the opposite resistive switching of the filament and TiOx layer induce habituation characteristic of the third-order memristor. The experimental conductance update curves in (b, e, h, k) were measured by consecutive 100 set pulses (0.75 V) with various widths (1 to 4 μs) followed by 100 reset pulses (−0.9 V and 1 μs).
To further disclose the switching mechanism of the third-order memristor, the conduction mechanisms for each resistance state (HRS, intermediate state between HRS and LRS, LRS, and habituation state) were investigated, as shown in Supplementary Fig. S21. When the device was in HRS, intermediate state, or LRS, the linear I–V relationship of hopping conduction was confirmed (see Supplementary Fig. S21b). On the contrary, for the habituation state, the I–V curve exhibited a non-linear relationship, indicating that the Schottky emission dominates conduction in the habituation state (see Supplementary Fig. S21c). The different conduction mechanisms for each state can be explained by the initially conductive and defective TiOx layer, where the oxygen anions from the filament reversibly oxidize the defective TiOx layer into the resistive TiOy layer with fewer defects, resulting in the Schottky emission (see Supplementary Figs. S21d–g). The results demonstrate that the movement of oxygen anions and the reversible oxidation of the TiOx layer induce the habituation characteristic.
The effect of the HfO2 layer thickness was investigated, as shown in Supplementary Fig. S22. The devices with thin HfO2 layer (5 nm) and thick HfO2 layer (10 nm) were fabricated and their resistive switching characteristics were compared by applying consecutive 100 set pulses followed by 100 reset pulses. As shown in Supplementary Fig. S22a, the device with a thin HfO2 layer did not show habituation regardless of the set pulse amplitude. The on/off ratio of the resistive switching increases as the set voltage pulse amplitude increases, and the device breaks down when the set voltage pulse amplitude exceeds 0.8 V. In the thinner HfO2 device, the oxygen anions from the thin HfO2 layer are not enough to form an insulative TiOy region in the TiOx layer. The thin HfO2 device showed typical LTP and LTD of the low-order memristor while the thick HfO2 device exhibited the habituation characteristic (see Supplementary Figs. S22b, c). Therefore, the third-state variable, the TiOx layer conductance, is not available for the thinner HfO2 device, indicating that the thickness of the HfO2 layer affects the resistive switching in the TiOx layer.
Memristor-based artificial sensory nervous system with habituation and sensitization
In the biological SNS, a post-synaptic motor neuron, responsible for determining animal responses, is connected to pre-synaptic sensory neurons through synapses. The pre-synaptic sensory neurons perceive different types of stimuli such as touch and pain. They transfer output spikes to the post-synaptic motor neuron when stimuli are received (see Fig. 4a).

a Schematic of the biological SNS. The pre-synaptic tactile neuron sensing a touch stimulus (yellow) and the pre-synaptic nociceptor sensing a pain stimulus (blue) are connected to the post-synaptic motor neuron (green), which generates responses. b Schematic of the developed MASNS for habituation and sensitization. c The voltage pulse forms according to the stimulus types. d The conductance update curves of the third-order memristor in the MASNS when various stimuli (touching only (0.8 V and 1 μs), electric shock only (−0.9 V and 1 μs), and both of the touching and the electric shock) are applied 50 times. The MASNS gradually reduces its sensitivity when the touching only stimuli are applied, while it maintains high sensitivity when the touching and the pain are applied together. The MASNS maintains low sensitivity for the electric shock only case because the pain is not related to the other stimulus. The device state was read by a read pulse (0.3 V and 100 μs).
Once the safe touch stimulus is received repeatedly without the pain stimulus, the synaptic strength between pre-synaptic and post-synaptic neurons decreases. It leads to gradually reduced activity of the post-synaptic motor neuron due to the habituation. On the contrary, when touch and pain stimuli are received simultaneously, the synaptic strength between pre-synaptic and post-synaptic neurons increases due to the sensitization. This enhanced synaptic strength activates the post-synaptic motor neuron. Consequently, when a touch stimulus is perceived after sensitization, the motor neuron readily generates output spikes to the muscle fibers, inducing locomotion.
If a pain stimulus is perceived solely without a touch stimulus, the synaptic strength between pre-synaptic and post-synaptic neurons remains unchanged, remaining at a low level. This is because the pain is not associated with any tactile stimulation. In this case, the motor neuron does not generate output spikes in response to touch stimulus7.
Based on the fabricated third-order HfO2 memristor, a MASNS with habituation and sensitization characteristics was developed (see Fig. 4b). The responses of the developed MASNS to the various stimulus conditions were examined as shown in Figs. 4c, d. In the developed MASNS, a tactile neuron module and a pain (electric shock) sensor module were employed to sense touch and pain stimuli, respectively, mimicking a biological SNS (see Fig. 4b). Upon perception of a touch or pain stimulus by the sensors, a pulse generator module transfers specific voltage pulses followed by a read pulse to the memristor. The read pulse generates an output current through the memristor, and the motor module induces a response (rotating) when the output current exceeds a specific threshold.
In the developed MASNS, a positive voltage pulse is applied to the third-order memristor upon sensing a tactile stimulus (touch), while a negative voltage pulse is applied upon sensing a pain stimulus (electric shock), as shown in Fig. 4b, c. There are three different input pulse scenarios depending on the applied stimuli (see Fig. 4c). When the touch stimulus is repeatedly applied without electric shock, the device conductance initially increases but soon decreases due to the habituation characteristic of the third-order memristor (see Fig. 4d). On the other hand, when the electric shock is repeatedly applied, the negative voltage pulse for the pain stimulus reduces the device conductance, maintaining it at a high resistance state. If both touch and electric shock stimuli are applied together, a combined voltage pulse with the negative and positive voltage pulses is applied to the third-order memristor. The combined voltage pulses adapt the device into low resistance state over repeated touch and electric shock, regardless of the pulse order (see Supplementary Fig. S23). The potentiation of the device in response to touch and electric shock indicates a strong synaptic connection between the pre-synaptic tactile neuron and the post-synaptic motor neuron. The synaptic characteristics, such as the number of stimuli required for sensitization or degree of dishabituation against a threatening event, can be finely adjusted by modifying the pulse condition for each stimulus, as shown in Supplementary Figs. S24 and S25, respectively. The realization of habituation and sensitization characteristics in the device without the need of bulky peripheral circuitries indicates the superior energy-efficiency of the third-order memristor-based MASNS for robotic applications. Supplementary Table S3 highlights the energy-efficiency of the third-order memristor-based MASNS compared to conventional circuit-based systems.
Habituation and sensitization of a robot arm with MASNS
Implementing MASNS in robotic systems could improve energy efficiency while reducing processor burden by effectively filtering out insignificant external signals, as shown in Supplementary Fig. S26. To investigate the effectiveness of the third-order memristor for an intelligent MASNS, we built a MASNS-implemented robot arm system (see Supplementary Fig. S27 and “Methods”). The robot arm generates movements in response to external stimuli that produce a memristor output current exceeding a specific threshold, analogous to the response of a motor system to sensory stimulation that generates excitatory post-synaptic potentiation exceeding a threshold potential in biological SNS (see Supplementary Fig. S28). The reaction of the robot arm against external stimuli (touching and electric shock) was tested with both the low-order and the third-order memristors (see Fig. 5).

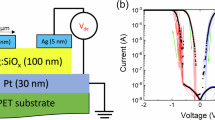
a Image of the MASNS-implemented robot arm system. Two types of stimuli (“touching + electric shock” or “touching only”) are randomly applied to the robot arm, and the robot arm generates a rotation response according to the conductance of the third-order memristor. Conductance changes of (b) the low-order or (c) third-order memristor in the MASNS-implemented robot arm (blue dotted line) and the corresponding rotating angles of the robot arm (red dotted line) for the applied stimuli. d, e. Images of the robot arm at time steps 1, 3, 5, and 6 in (b, c), respectively. The third-order memristor-based MASNS-implemented robot arm ignores safe stimulus at time step 5, but it sensitively reacts to the threatening stimulus at time step 6. Results of the low-order (f) or third-order (g) memristor-based MASNS implemented robot arms responses against 480 safe stimuli.
In the experiment, the robot arm was stimulated five times by touching a pen. Subsequently, touching and electric shock stimuli were simultaneously applied by touching the robot arm with a 5 V charged metal tip in the 6th event, followed by three instances of touch stimuli in the 7th to 9th events. In the case of the MASNS-implemented robot arm with the low-order memristor (5 nm of HfO2 layer), the conductance of the memristor monotonically increased as the touch stimuli were applied due to the monotonous conductance update of the low-order memristor (see Fig. 5b). The robot arm’s response after applying stimulus at the 1st, 3rd, 5th, and 6th events are shown in Fig. 5d. As shown in Fig. 5b, d, and Supplementary Movie 1, the robot arm generated rotating locomotion, which corresponds to the avoidance action to the dangerous signals, for every safe touch stimulus as well as for the threatening electric shock at the 6th event. In other words, the robot arm with the low-order memristor-based MASNS wasted energy and time by sensitively responding to insignificant and safe stimuli.
On the other hand, the robot arm with the third-order memristor-based MASNS was tested in the same manner, and the results are shown in Fig. 5c, e, and Supplementary Movie 2. Due to the habituation characteristics of the developed third-order memristor, the conductance of the memristor did not monotonically increase with the application of voltage pulses. The conductance of the memristor abruptly increased when the first touch stimulus was applied, and the robot arm generated a strong response against the first touch stimulus due to the strong synaptic strength in the MASNS (see Fig.5c, e). However, as the safe touch stimuli were consecutively applied, the conductance of the memristor decreased, and the response of the robot arm was also gradually reduced. Consequently, the robot arm did not react against the safe touch stimulus after the 4th stimulus was applied, which means that the robot arm does not consume energy and time to respond to the insignificant external stimuli.
While habituation makes an animal ignore insignificant and safe stimuli, the sensitization of the biological SNS enables an animal to sensitively respond to a threatening stimulus (or a stimulus that was once safe but is now threatening). Without sensitization, recognizing stimuli that were once safe but are now threatening becomes difficult. Therefore, sensitization is an essential function for avoiding threats. As shown in Fig. 5c, e, the conductance of the third-order memristor, habituated at the 5th event, abruptly increased when the voltage pulse for the “touching + electric shock” case in Fig. 4d was applied at the 6th event. Then, the robot arm with the third-order memristor-based MASNS generated a strong response at the 6th event. The robot arm sensitively responded to the following safe stimulus at the 7th and 8th touching events until habituation occurs, demonstrating similarity to the sensitization of the biological SNS.
To compare the responses of each MASNS under severe stimuli, conductances of the low-order memristor and the third-order memristor were measured by applying 20 cycles of consecutive 24 touch stimuli followed by a single touching and electric shock stimulus (see Fig. 5f, g, and Supplementary Fig. S29). The applied stimuli contain a total of 480 safe touch stimuli, and the number of events that the conductance exceeds the threshold was counted. As shown in Fig. 5f and Supplementary Fig. S29a, the low-order memristor’s conductance exceeded the threshold for 479 events among 480 events, demonstrating that a robotic system with the low-order memristor-based MASNS will consume unnecessary energy to respond to the safe and insignificant stimulus. The third-order memristor’s conductance, however, did not exceed the threshold for 341 events among 480 events due to habituation, effectively ignoring approximately 71% of safe and insignificant stimuli (see Fig. 5g and Supplementary Fig. S29b). At the same time, the conductance of the third-order memristor exceeded the threshold for every electric shock stimulus due to sensitization. It is noted that long-term habituation, a decrement of overall synaptic strength according to repetitive input stimuli in the biological SNS, is observed in third-order memristor, as shown in Fig. S29b42. The results prove that the third-order memristor-based MASNS prevents unnecessary energy consumption in robotic systems while allowing sensitive responses to threats through habituation and sensitization, similar to the biological SNS.
Discussion
In this study, a robot arm system with habituation and sensitization is experimentally demonstrated by implementing the third-order memristor-based artificial sensory nervous system (MASNS). A high-performance HfO2-based third-order memristor was fabricated on an 8-inch wafer. The developed third-order memristor possesses three state variables including the filament width, device temperature, and the TiOx layer conductance, whereas conventional memristor devices have one or two state variables. The third-order memristor exhibits complex resistive switching behavior including habituation, sensitization, and frequency-dependent plasticity, owing to its three state variables. By connecting touch and pain (electric shock) sensor modules with a pulse generator, the third-order memristor successfully mimics the synaptic behaviors of the biological SNS with habituation and sensitization. Furthermore, the low-order and third-order memristor-based MASNS were directly implemented into the robot arm to analyze its response to safe or threatening stimuli. The third-order memristor-based MASNS enables the robot arm to ignore 71% of safe touch stimuli while sensitively responding to every threatening electric shock, demonstrating the effect of habituation and sensitization in terms of energy saving and avoiding threats. The developed third-order memristor and the MASNS present a promising approach for future intelligent robotic systems capable of efficiently handling external stimuli based on experiences without increasing processor loads or latency.
Methods
Device fabrication
The fabricated third-order memristor has a TiN/Ti/HfO2/TiN structure. The 10 nm of HfO2 switching layer (5 nm for the low-order memristor) is deposited through atomic layer deposition (ALD) system on the sputtered TiN bottom electrode. The 10 nm of Ti layer and the 150 nm of TiN layer are sequentially sputtered on the HfO2 layer, and the active region is defined by dry etching with SF6 gas. After defining the active region, the device is passivated with SiO2 and the metal via and wires are fabricated through the back-end-of-line (BEOL) process. The maximum fabrication temperature of the BEOL process in this study is 400 °C, which is high enough to oxidize the Ti layer into the TiOx layer by attracting oxygens from the HfO2 layer. The final device stack after the fabrication is TiN/Ti/TiOx/HfO2/TiN, as illustrated in Fig. 2a–c. It is noteworthy that potential issues may arise during large-scale array integration of the device, such as IR-drop due to the high device conductivity and sneak-path problems within the array. Material optimization to reduce the overall device conductivity, alongside the integration of appropriate selector devices, could mitigate these issues and facilitate the realization of large-scale integrated third-order memristor arrays.
Electrical characteristics measurement
The I-V sweep results of the fabricated device are measured through Keithley 4200A-SCS, by sweeping the voltage to the top electrode while grounding the bottom electrode and sensing the output current. The conductance update curves of the device according to the input voltage pulses are measured through a data acquisition tool (DAQ) and a current preamplifier. The DAQ generates a voltage pulse and measures the amplified output current through the device and the preamplifier.
Third-order memristor modelling
The conductance update characteristics of the third-order memristor were simulated using MATLAB by modelling two anti-serially connected resistive switching variables: the filament diameter and TiOx layer conductivity. Initially, the conductance of the filament is set to be low (1.9 mS), while that of the TiOx layer is set to be high (9.2 mS). Then, consecutive 100 set pulses are applied, which potentiate or depress the conductance of the filament or TiOx layer, respectively. For the cases with short set pulse widths (1 and 2 μs), the resistive switching in the TiOx layer is negligible, resulting in a monotonic increment in the conductance update curves. However, in the longer set pulse width cases (3 and 4 μs), the conductance depression in the TiOx layer is dominant, leading to non-monotonic conductance update curves with consecutive set pulses. After applying set pulses, consecutive 100 reset pulses are applied to the device, potentiating the conductance of the TiOx layer while lowering the filament’s conductance. It is noted that the voltage division between the filament and TiOx layer is considered in the simulation.
Robot arm experiments
The robot arm system with MASNS was built and experimentally tested to investigate the effectiveness of the third-order memristor-based MASNS in robotic applications. The composition and the operation method of the manufactured robot arm system are as follows; a commercialized pressure (tactile) sensor and an electrode, which are connected to the controller (Arduino Uno), are attached to the robot arm to sense a tactile stimulus and an electric shock, respectively. A rotating motor is connected to the robot arm to generate locomotion (lifting the arm). When the robot arm is touched with a pen, the tactile sensor transfers the touch stimulus to the controller, and the DAQ applies a voltage pulse for the “touching only” case in Fig. 4c to the memristor. When the robot arm is touched with a 5 V charged metal tip (touching and electric shock are applied together), the touch sensor and the electrode perceive the touching and electric shock stimulus, respectively. Then, the DAQ applies a voltage pulse for the “touching+electric shock” case in Fig. 4c to the memristor. The pulse condition for each case is explained in Supplementary Fig. S29. After applying a voltage pulse to the memristor, the conductance of the memristor is measured by the following read voltage pulse. The rotating angle of the robot arm is determined by the conductance of the memristor. If the device conductance does not exceed the threshold, the rotating motor does not generate locomotion. On the other hand, if the device conductance exceeds the threshold, the controller operates the motor and rotates the robot arm. The rotating angle is decided by the device conductance (the detailed relationship between the memristor’s conductance and the rotating angle is described in Supplementary Fig. S27).
Data availability
The data required for assessing the conclusions are provided in the Source Data file. Source data are provided with this paper.
References
Broadbent, D. E. Information processing in the nervous system. Science 150, 457–462 (1965).
Wan, Q. et al. Protein kinase C acts as a molecular detector of firing patterns to mediate sensory gating in Aplysia. Nat. Neurosci. 15, 1144–1152 (2012).
Groves, P. M. & Thompson, R. F. Habituation: a dual-process theory. Psychol. Rev. 77, 419–450 (1970).
Kandel, E. R. The molecular biology of memory storage: A dialogue between genes and synapses. Science 294, 1030–1038 (2001).
Pinsker, H., Kupfermann, I., Castellucci, V. & Kandel, E. Habituation and dishabituation of the gill-withdrawal reflex in Aplysia. Science 167, 1740–1742 (1970).
Bruner, J. & Tauc, L. Habituation at the synaptic level in Aplysia. Nature 210, 37–39 (1966).
Antonov, I., Antonova, I., Kandel, E. R. & Hawkins, R. D. The contribution of activity-dependent synaptic plasticity to classical conditioning in Aplysia. J. Neurosci. 15, 6413–6422 (2001).
Castellucci, V., Pinsker, H., Kupfermann, I. & Kandel, E. R. Neuronal mechanisms of habituation and dishabituation of the gill-withdrawal reflex in Aplysia. Science 167, 1745–1748 (1970).
Sun, J., Zhao, L., Wen, S. & Wang, Y. Memristor-based neural network circuit of emotional habituation with contextual dependency. IEEE Internet Things J. 10, 17382–17391 (2023).
Card, H. C. & Moore, W. R. Silicon models of associative learning in Aplysia. Neural Netw. 3, 333–346 (1990).
Wang, T. & Akers, L. A. Hardware implementation of habituation. in Proc. IEEE International Symposium on Circuits and Systems (ISCAS), 2092–2095 (IEEE, 1995).
He, K. et al. Artificial neural pathway based on a memristor synapse for optically mediated motion learning. ACS Nano 16, 9691–9700 (2022).
Wang, S. et al. Memristor-based intelligent human-like neural computing. Adv. Electron. Mater. 9, 2200877 (2023).
Park, H. L. et al. Flexible neuromorphic electronics for computing, soft robotics, and neuroprosthetics. Adv. Mater. 32, 1903558 (2020).
Jiang, C. et al. A flexible artificial sensory nerve enabled by nanoparticle-assembled synaptic devices for neuromorphic tactile recognition. Adv. Sci. 9, 2106124 (2022).
Wu, Z. et al. A habituation sensory nervous system with memristors. Adv. Mater. 32, 2004398 (2020).
Yan, X. et al. A multimode-fused sensory memory system based on a robust self-assembly nanoscaffolded BaTiO3:Eu2O3 memristor. InfoMat 5, e12429 (2023).
Liu, F. et al. Printed synaptic transistor-based electronic skin for robots to feel and learn. Sci. Robot. 7, eabl7286 (2022).
Chen, B. et al. A memristor-based hybrid analog-digital computing platform for mobile robotics. Sci. Robot. 5, eabb6938 (2020).
Liu, F. et al. Neuro-inspired electronic skin for robots. Sci. Robot. 7, eabl7344 (2022).
Bartolozzi, C., Indiveri, G. & Donati, E. Embodied neuromorphic intelligence. Nat. Commun. 13, 1024 (2022).
John, R. A. et al. Self healable neuromorphic memtransistor elements for decentralized sensory signal processing in robotics. Nat. Commun. 11, 4030 (2020).
Zhu, K. et al. Hybrid 2D–CMOS microchips for memristive applications. Nature 618, 57–62 (2023).
Park, S. O., Jeong, H., Park, J., Bae, J. & Choi, S. Experimental demonstration of highly reliable dynamic memristor for artificial neuron and neuromorphic computing. Nat. Commun. 13, 2888 (2022).
Rao, M. et al. Thousands of conductance levels in memristors integrated on CMOS. Nature 615, 823–829 (2023).
Choi, S. et al. SiGe epitaxial memory for neuromorphic computing with reproducible high performance based on engineered dislocations. Nat. Mater. 17, 335–340 (2018).
Kumar, S., Wang, X., Strachan, J. P., Yang, Y. & Lu, W. D. Dynamical memristors for higher-complexity neuromorphic computing. Nat. Rev. Mater. 7, 575–591 (2022).
Rodriguez-Fernandez, A., Cagli, C., Perniola, L., Miranda, E. & Suñé, J. Characterization of HfO2-based devices with indication of second order memristor effects. Microelectron. Eng. 195, 101–106 (2018).
Chaurasiya, R., Shih, L. C., Chen, K. T. & Chen, J. S. Emerging higher-order memristors for bio-realistic neuromorphic computing: a review. Mater. Today 68, 356–376 (2023).
Yang, K., Joshua Yang, J., Huang, R. & Yang, Y. Nonlinearity in memristors for neuromorphic dynamic systems. Small Sci. 2, 2100049 (2022).
Kim, S. et al. Experimental demonstration of a second-order memristor and its ability to biorealistically implement synaptic plasticity. Nano Lett. 15, 2203–2211 (2015).
Park, S. O. et al. Linear conductance update improvement of CMOS-compatible second-order memristors for fast and energy-efficient training of a neural network using a memristor crossbar array. Nanoscale Horiz. 8, 1366–1376 (2023).
Celano, U. et al. Imaging the three-dimensional conductive channel in filamentary-based oxide resistive switching memory. Nano Lett. 15, 7970–7975 (2015).
Zhang, Y. et al. Evolution of the conductive filament system in HfO2-based memristors observed by direct atomic-scale imaging. Nat. Commun. 12, 7232 (2021).
Yao, P. et al. Fully hardware-implemented memristor convolutional neural network. Nature 577, 641–646 (2020).
Hu, R. et al. Nitrogen-oxyanion-doped HfO2 resistive random-access memory with chemically enhanced forming. IEEE Electron Device Lett. 44, 618–621 (2023).
Chen, J. et al. High-precision symmetric weight update of memristor by gate voltage ramping method for convolutional neural network accelerator. IEEE Electron Device Lett. 41, 353–356 (2020).
Shi, T., Wu, J. F., Liu, Y., Yang, R. & Guo, X. Behavioral plasticity emulated with lithium lanthanum titanate-based memristive devices: habituation. Adv. Electron. Mater. 3, 1700046 (2017).
Zhao, B., Xiao, M., Shen, D. & Zhou, Y. N. Heterogeneous stimuli induced nonassociative learning behavior in ZnO nanowire memristor. Nanotechnology 31, 125201 (2020).
Lee, T. J. et al. Realization of an artificial visual nervous system using an integrated optoelectronic device array. Adv. Mater. 33, 2105485 (2021).
Zhang, Z. et al. Neuromorphic learning with Mott insulator NiO. Proc. Natl. Acad. Sci. USA 118, e2017239118 (2021).
Carew, T. J. et al. Long-term habituation of a defensive withdrawal reflex in Aplysia. Science. 175, 451–454 (1972).
Acknowledgements
This work was supported by National R&D Program through the National Research Foundation of Korea (NRF) funded by the Korean government (MSIT) (2022M3I7A2078273, 2022M3F3A2A01072851, 2020R1C1C1007464, RS-2024-00401234, RS-2025-00555433, and RS-2025-04162969), and Nanomedical Devices Development Project of NNFC. The EDA tool was supported by the IC Design Education Center (IDEC), Korea.
Author information
Authors and Affiliations
Contributions
S.P. and S.C. conceived this work. S.P. and H.J. designed the robot arm experiment. S.P., H.J. and S.S. measured the device and analyzed the device switching mechanisms. S.P., Y.K. and J.L. fabricated the device and conducted TEM imaging. S.P. and H.J. prepared the experiment movies. S.P. and S.C. prepared the manuscript. J.L. and S.C. supervised the study.
Corresponding authors
Ethics declarations
Competing interests
The authors declare no competing interests.
Peer review
Peer review information
Nature Communications thanks Zhengwu Liu, Shriram Ramanathan and Zhibo Yan for their contribution to the peer review of this work. A peer review file is available.
Additional information
Publisher’s note Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Source data
Rights and permissions
Open Access This article is licensed under a Creative Commons Attribution 4.0 International License, which permits use, sharing, adaptation, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons licence, and indicate if changes were made. The images or other third party material in this article are included in the article’s Creative Commons licence, unless indicated otherwise in a credit line to the material. If material is not included in the article’s Creative Commons licence and your intended use is not permitted by statutory regulation or exceeds the permitted use, you will need to obtain permission directly from the copyright holder. To view a copy of this licence, visit http://creativecommons.org/licenses/by/4.0/.
About this article

Cite this article
Park, SO., Jeong, H., Seo, S. et al. Experimental demonstration of third-order memristor-based artificial sensory nervous system for neuro-inspired robotics. Nat Commun 16, 5754 (2025). https://doi.org/10.1038/s41467-025-60818-x
Received:
Accepted:
Published:
Version of record:
DOI: https://doi.org/10.1038/s41467-025-60818-x
This article is cited by
-
Synaptic Plasticity Engineering for Neural Precision, Temporal Learning, and Scalable Neuromorphic Systems
Nano-Micro Letters (2026)
-
Semiconductor-related research and education at KAIST
Nature Reviews Electrical Engineering (2025)
