
Abstract
Time crystals are an enigmatic phase of matter in which a quantum mechanical system displays repetitive, observable motion – they spontaneously break the time translation symmetry. On the other hand optomechanical systems, where mechanical and optical degrees of freedom are coupled, are well established and enable a range of applications and measurements with unparalleled precision. Here, we connect a time crystal formed of magnetic quasiparticles, magnons, to a mechanical resonator, a gravity wave mode on a nearby liquid surface, and show that their joint dynamics evolves as a cavity optomechanical system. Our results pave way for exploiting the spontaneous coherence of time crystals in an optomechanical setting and remove the experimental barrier between time crystals and other phases of condensed matter.
Similar content being viewed by others


Introduction
Time crystals can be divided into two broad classes depending on whether they break the discrete or continuous time translation symmetry; the former is called a discrete time crystal, while the latter is known as a continuous time crystal (CTC). The concept of time crystals comes very close to a perpetual motion machine1,2,3; spontaneous breaking of continuous time-translation symmetry requires a non-equilibrium system owing to the no-go theorem3,4. For this reason, experimental realisations of time crystals are never in true equilibrium. The majority of existing CTC realisations utilise continuous pumping to bring the system out of equilibrium5,6,7,8,9, albeit pump-less realisations based on quasiparticles with finite lifetime10,11 are perhaps the closest analogue to the original time crystal idea1. Overall, time crystals (both continuous and discrete) have been created in a range of physical systems5,6,7,8,9,10,11,12,13,14,15,16,17 and coupled to other time crystals18,19, but always in isolation from their environment. Their inherent long-term coherence7 and versatility20, in particular, is yet to be investigated with coupled external degrees of freedom.
In this work, we realise controlled interaction between a CTC5,6,7,8,9,10,11,11,17 and a well-defined external mechanical degree of freedom. We find that the coupled dynamics of the two periodic processes, the internal motion in the time crystal and the mechanical oscillations, form an optomechanical-like system21,22. Optomechanics comes with rich and well-understood phenomenology that enables analysing the coupling and its effects on the time crystal in detail. We utilise a time crystal formed of magnetic quasiparticles of superfluid 3He, magnons, interacting with a nearby liquid surface. We show that the time crystal frequency is modulated by the motion of the free surface, providing a key component of a cavity optomechanical system. Finally, we find that the coupling is nonlinear and tunable, enabling access to different regimes of optomechanics.
Results and discussion
Experimental realisation of the CTC
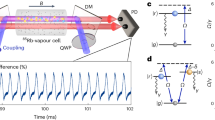
In our experiments magnons are trapped in the superfluid bulk by the combined effect of the order parameter distribution of the superfluid and the magnetic field profile, as illustrated in Fig. 1a. We pump non-equilibrium magnons into this system using a short (~1 ms) radio frequency (RF) pulse at a frequency close to but above the Larmor frequency ∣γ∣H ≈ 833 kHz, where γ is the gyromagnetic ratio of 3He and H ≈ 25 mT is the magnitude of the applied magnetic field. All further evolution proceeds without external pumping. As the pump has been turned off, the precessing individual magnons quickly dephase (in about 3 ms) due to the spatial profile of H. As partial equilibrium within the magnon subsystem is established, magnons condense to the ground level in the trap with a typical time scale of ~0.1 s, forming a Bose-Einstein condensate (BEC). The BEC of magnons is characterised by coherent precession of spins of all condensed magnons with a common frequency ωTC, spontaneously breaking the continuous time translation symmetry and thus forming the CTC. It is worth noting that ℏωTC is simultaneously the magnon chemical potential as determined by the ground state energy of the trapping potential23,24. In experiments, the coherent precession is manifested as an oscillating voltage induced in the RF coils by electromagnetic induction, Fig. 1b. While magnons slowly decay, the CTC preserves its coherent state for up to a few minutes, or about 108 cycles.

a The CTC is formed of magnons (represented by operator \(\hat{a}\)) that are spatially trapped by the combined effect of the spin-orbit energy related to order parameter distribution (radial direction) and Zeeman energy controlled by the magnetic field profile (axial direction). The magnetic field profile H is used to move the CTC against the free surface (red blob inside the container) or within the bulk liquid (blue blob inside the container). The CTC couples to externally driven surface wave mode (represented by the position operator \(\hat{x}\)). b The precession of magnetisation within the time crystal is observed as an induced, decaying sinusoidal voltage in the pick-up coils, recorded with downconversion in frequency. c A sliding windowed fast Fourier transform (FFT) of the signal with on-resonance mechanical forcing reveals that the CTC signal is accompanied by sidebands. The sidebands result from the frequency modulation of the time crystal signal, caused by the motion of the free surface. The red dash line indicates the mean frequency of the time crystal in the limit of vanishing magnon number \({\omega }_{{{\rm{TC}}}}^{\infty }=\langle {\omega }_{{{\rm{TC}}}}(t\to \infty )\rangle\). The measurements of the optomechanical coupling are carried out in this limit. The large inset shows a snapshot of the signal (blue points), including the fitted spectrum shape (red line) and parameter values in the region where the time crystal’s frequency has ceased changing. The fit details are explained in Methods. The fundamental surface wave mode driven in this Article is depicted in the small inset.
The optomechanical-like system
In the paradigmatic optomechanical system, the optical cavity is formed of two mirrors, one of them fixed and the other attached to a spring, allowing the mirror to move. In this setting, the cavity resonance frequency changes linearly with the position of the mirror, and radiation pressure couples the optical and mechanical degrees of freedom. Here, the time crystal is located in the vicinity of a free surface of the superfluid, where gravity waves of the surface make a mechanical oscillator. For small gravity wave amplitudes, the surface is tilted uniformly and oscillates back and forth. The surface motion modifies the superfluid order parameter distribution and, therefore, the time crystal frequency. We can write the time crystal frequency as (See Methods).
where ω0 is the time crystal’s frequency when the free surface is orthogonal to the container axis, g is an optomechanical coupling constant, t is time, and θ(t) − θ0 is the angle between the container axis and the surface normal. We have allowed for a small asymmetry θ0 describing the tilt of the container axis relative to gravity in the absence of surface motion. For small-amplitude surface waves close to the container axis \(\theta (t,{\omega }_{{{\rm{exc}}}})={\theta }_{\max }({\omega }_{{{\rm{exc}}}})\sin ({\omega }_{{{\rm{exc}}}}t)\), where ωexc is the drive frequency and \({\theta }_{\max }({\omega }_{{{\rm{exc}}}})\) characterises the frequency-dependent surface oscillation amplitude. We note that Eq. (1) allows tuning between quadratic (\({\theta }_{0}\ll {\theta }_{\max }\)) and linear (\({\theta }_{0}\gg {\theta }_{\max }\)) coupling by using θ0 as a control parameter, providing access to dispersive optomechanics25.
We control the position of the time crystal magnetically using a pinch coil. The time crystal can be positioned so that it is in the direct vicinity of the free surface, or in the bulk of the superfluid a few mm below the surface18,19. In these two cases, the physical mechanism behind the coupling g of the time crystal to the moving free surface is qualitatively different as discussed later in the Article. In all other respects the location makes no difference to the interpretation of the data.
Here, we drive the mechanical mode by moving the sample container nearly horizontally (See Methods) with constant amplitude throughout formation and decay of the CTC. We use windowed Fourier transform of the pick-up signal for inferring the time crystal dynamics, Fig. 1c. The time crystal signal exhibits sidebands with the intensity which depends on the strength of the drive of the mechanical mode. These sidebands result from the optomechanical-like frequency modulation of ωTC, caused by the motion of the superfluid free surface. A reconstruction of the experimental signal (inset in Fig. 1c) allows extracting the products \(G\equiv g{\theta }_{\max }^{2}\) and \(\Theta \equiv {\theta }_{0}{\theta }_{\max }^{-1}\) as explained in Methods. Note that the CTC frequency is also increasing slowly across half a minute by about 150 Hz before becoming stable. This is because local magnon density modifies the order parameter part of the trap26, and the magnon number slowly decreases during the experiment due to dissipation27. We note that because of the very long life time of the time crystal and the changing frequency, the time crystal line width is determined by the length of the Fourier time window, not the time crystal quality factor. As such, the sideband width is not a measure of the dissipation of the mechanical mode, unlike in paradigmatic optomechanical systems21.
Characterisation of the mechanical mode
We use the time crystal to characterise the mechanical mode by sweeping the frequency of the mechanical forcing across the surface gravity wave resonance and recording the modulation amplitude of the time crystal frequency. The response is centred at ≈12.5 Hz (Fig. 2a, b), which agrees well with the theoretical expectation for surface waves in this geometry, within 0.1 Hz (See Methods).

a The frequency modulation amplitude \(G=g{\theta }_{\max }^{2}\) of the bulk time crystal measured as a function of the mechanical forcing frequency ωexc. The solid lines are fits to a driven and damped harmonic oscillator response, from which the resonance frequency and width of the mechanical surface wave mode are determined. The thermometer fork width Δf relative to the intrinsic width Δf0 of the device for the two data sets is given in the legend. In the shown temperature interval the on-resonance amplitude G remains approximately constant despite exponentially increasing resonance width, suggesting that coupling increases with the same exponent as a function of temperature. Here, unlike other measurements in this Article, the magnon number was kept constant by applying continuous pumping to an excited state in the confining trap10, as extremely long lifetime of bulk time crystal makes pulsed spectral measurements impractical. b Data measured for the surface time crystal are extracted from the end of the decay after an RF excitation pulse, where the time crystal’s frequency has stopped changing. c The extracted width of the surface wave resonance (points) scales linearly with the the thermometer fork resonance width (solid line). This confirms that the damping of the mechanical mode that is coupled to the time crystal mainly originates from scattering of thermal excitations in the superfluid. The y-axis intercept corresponds to the mechanical mode dissipation in the absence of superfluid thermal excitations, which may be caused by friction on the container walls or by the edge states bound to the free surface of the topological superfluid68.
The width of the surface wave resonance (its dissipation) is found to increase linearly with the quasiparticle density in the superfluid (Fig. 2c). This observation connects the time crystal to the motion of the free surface beyond doubt, since the mechanical dissipation in the superfluid is caused by scattering of thermal excitations from the moving surface28. The fermionic quasiparticle density can be measured separately by a tuning fork resonator, whose resonance width at low temperatures is linearly proportional to the quasiparticle density29, which in turn depends exponentially on temperature. Based on the matching resonance frequency and the observed linear dependence between the surface wave resonance width and that of the tuning fork’s, we conclude that the observed resonance is connected with motion of the superfluid surface.
The dissipation of the free surface oscillation releases heat into the superfluid, the amount of which depends on the drive power. We can measure the resulting temperature gradient in the superfluid by using the time crystal as a thermometer30 and comparing this with the reading of a separate tuning fork thermometer at the bottom of the sample container cylinder. The typical temperature increase at the free surface is a few μK, which corresponds to a few pW of heating power31. The extracted heating is then converted into the maximum surface tilt angle \({\theta }_{\max }\), which provides an independent measurement of the amplitude of the surface oscillations (See Methods).
Determining the nature of optomechanical-like coupling
With direct access to the mechanical mode amplitude, we now compare the coupling in Eq. (1) with observations. Figure 3a shows that the measured time crystal frequency modulation amplitude G is proportional to the square of the measured mechanical mode amplitude \({\theta }_{\max }^{2}\). For sinusoidal mechanical oscillations coupled quadratically to the time crystal as in Eq. (1), the mean frequency of the time crystal is expected to be shifted by half of the modulation amplitude. This is confirmed by Fig. 3b. Increasing the amplitude of the mechanical forcing leads to increased amplitude of the frequency modulation of ωTC, seen as higher-order side bands appearing and eventually the central band disappearing as shown in Fig. 3e. In line with our interpretation of θ0, panel c in Figure 3 shows that the product of the fitted asymmetry Θ and \({\theta }_{\max }\), i.e. \({\theta }_{0}=\Theta \times {\theta }_{\max }\), for both the bulk and surface time crystals, is independent of the mechanical mode amplitude. Together, these observations confirm that the coupling follows Eq. (1).

a With on-resonance mechanical forcing, the fitted time crystal frequency modulation amplitude G (points) is found to depend linearly on \({\theta }_{\max }^{2}\) (fitted lines). b The mean frequency shift \(\Delta {\omega }_{{{\rm{TC}}}}^{\infty }=({\omega }_{{{\rm{TC}}}}^{\infty }({\theta }_{\max })-{\omega }_{{{\rm{TC}}}}^{\infty }({\theta }_{\max }=0))\) is half of the frequency modulation amplitude, in agreement with Eq. (1). c The product of the fitted asymmetry Θ and \({\theta }_{\max }\) (points) is found to be independent of the mechanical motion amplitude, as expected if θ0 originates from misalignment of the surface normal and container axis. Solid horizontal lines are a guide to the eye. d As a function of the static tilt angle, the surface time crystal frequency shift (points) is consistent with the coupling constant gsurf between 2.2 and 12.0 Hz deg−2 determined from dynamic measurements (red and magenta shaded regions). The static shift for the bulk time crystal (points) is smaller than expected from the dynamic measurements (blue and magenta shaded regions) with gbulk in the range from 9.8 to 54.0 Hz deg−2, showing that the optomechanical coupling is enhanced significantly in the dynamic case. The red dash line is a fit to points with gsurf = 3.74 Hz deg−2. The horizontal error bars correspond to the value of the static tilt from c and the vertical error bars correspond to one standard deviation for measurements performed at different minimum coil currents (Nsurface = 8, Nbulk = 3). e Bottom: Larger mechanical forcing amplitude results in larger frequency modulation, reflected in the number and amplitude of the side bands seen in the Fourier spectrogram of the time crystal signal. Top: For the largest free surface motion amplitudes the time crystal frequency modulation becomes large enough to completely diminish the central frequency band corresponding to \({\omega }_{{{\rm{TC}}}}^{\infty }\). The black dashed line in the bottom panel shows where this individual frequency spectrum lies in the plot below.
Finally, we can identify different contributions to the optomechanical-like coupling comparing the bulk and surface time crystal responses to applied static tilt of the free surface. Within experimental uncertainties, the surface time crystal frequency shift, and thus coupling gsurf, is the same whether the tilt is static or dynamic (Fig. 3d). This implies that the surface time crystal frequency follows quasi-static changes in the confining trap as determined by the motion of the surface. The bulk time crystal coupling gbulk is smaller than the surface coupling if only static tilt is applied. This is reasonable as the effect of the tilted surface, via the order parameter part of the trapping potential, is felt less further away from the surface.
With dynamic tilt, however, the bulk coupling is enhanced by more than an order of magnitude. Additionally, this enhancement increases with temperature, as can be seen in Fig. 2a, where larger mechanical line width at higher temperature does not reduce the measured signal in resonance. The additional coupling is caused by the superfluid flow linked to the surface displacement. This flow modifies the order parameter spatial distribution, and the magnitude of the effect depends exponentially on temperature32,33. The surface time crystal does not react to the flow, because close to the surface, the boundary condition rigidifies the order parameter trap18,19 and thus the superflow is not able to change the trap shape. Postulating coincidence of dynamic and static coupling for the surface time crystal, we can estimate that at the lowest measured temperatures, about 70% of the heat dissipated by the moving free surface is carried away by surface-bound Andreev states34. Theoretical details and a phenomenological derivation supporting the above findings can be found in Methods. We also note that the measured asymmetry of the coupling in Fig. 3c is smaller for the bulk time crystal than for the surface one. This has natural explanation as the residual static tilt of the container axis with respect to gravity becomes less important for the bulk time crystal, where the coupling is mostly dynamic, due to superflow.
Discussion and outlook
Based on the observations reported in this Article, we conclude that continuous time crystals can be coupled to a macroscopic mechanical oscillator and that the resulting coupled dynamics are described by an optomechanical-like Hamiltonian, thus combining the inherent coherence of time crystals with the sensitivity of optomechanical systems. We suggest to call such methodology time crystal optomechanics. The underlying idea, tuning the CTC period by coupling to an external degree of freedom, is very general, and we expect that time crystal optomechanics can be realised in other physical systems9. This will open new avenues for research on time crystals as optomechanical systems have shown the capacity to push the boundaries of both fundamental and applied physics35, for example, via measuring weak forces36,37,38, cooling mechanical degrees of freedom down to their ground state39, and even entangling them40. Replacing the cavity of an optomechanical system with a CTC may allow similar applications in parameter ranges (e.g. in terms of temperatures, frequencies and/or coherence times) inaccessible in traditional optomechanical systems. Although our scheme is not directly applicable to discrete time crystals (DTCs), it is also an interesting question whether new avenues can be opened by coupling a DTC to a mechanical mode.16,41
In our present system, the optomechanical coupling is found to be predominantly quadratic42, but is expected to be tuneable all the way to linear by adjusting θ0. We also note that the frequency modulation scheme in our experiments is similar to frequency comb generation using a modulated continuous wave laser43, paving way for utilising time crystals for precision spectroscopy44. For suitably chosen large mechanical drive amplitudes the system becomes transparent at the time crystal’s central frequency, Fig. 3e. Control over the transparency of a truly macroscopic and long-living quantum state may prove useful for example for quantum state storage45, as the system additionally has continuously tunable central frequency (via magnetic field) and band separation (via cylinder radius or coupling to another type of mechanical resonator). We also note that the underlying physical system is a topological superfluid, providing wide possibilities from dark matter research46,47 to detection of topological defects48,49 using the optomechanical time crystal system as an instrument.
Applications of optomechanics to a large extent rely on the sufficiently strong coupling between optical and mechanical modes or, in other words, sufficiently strong backreaction through the radiation pressure. This allows manipulation of the mechanical mode, including its quantum state, via the optical cavity. Following this idea, we can estimate the performance of our system in a similar manner: The surface tilt θ1, corresponding to a single ripplon, can be estimated from E(θ1) ~ ℏωSW (see Eqs. (M3) and (M6)) as θ1 ~ 3 ⋅ 10−11 degrees. This tilt results in the CTC frequency shift g1 = 2gθ0θ1 ~ 10−10 Hz, which is much smaller that the “cavity” (CTC) decay rate κ ~10−2 s. For many practical applications, the light-enhanced (here, magnon-enhanced) coupling \({g}_{1}\sqrt{N}\), where N is the number of the quanta in the cavity, is the relevant parameter21. With a typical magnon number N ~ 1012 in the CTC in our experiment, even this scaled coupling is below κ. The backreaction force from the magnon CTC to the free surface is Fmagn = ℏ∂ωTC/(R∂θ)N ~10−18 N is much smaller than the mechanical damping force \({F}_{{{\rm{damp}}}} \sim E({\theta }_{\max })/(QR{\theta }_{\max }) \sim 1{0}^{-8}\,\)N and thus is not directly observable. Nevertheless, even with these limitations, we have characterised surface waves in the coldest ever glass of liquid.
Importantly, the limitations of our present setup, not optimised for optomechanics, are not fundamental. Time crystal optomechanics could be realised in the quantum regime and can also achieve strong coupling by using nanoelectromechanical resonators as the mechanical degree of freedom50. Such devices have significantly lower mass than the surface waves in this work, and can be designed to have orders of magnitude larger resonance frequencies and quality factors, both of which are essential for reaching the quantum regime. Potentially, such a setup allows for mechanical resonance frequencies matching or even exceeding the optical mode frequency, yielding access to the mechanical dynamical Casimir effect51,52 and yet unexplored regimes of optomechanics. Moreover, an attached micromagnet could be utilised to drastically enhance coupling with the magnonic time crystal. We emphasise that similar research avenues may be accessible also at room temperature by utilising suspended yttrium-iron-garnet (YIG) film resonators53, which can host magnon time crystals at room temperature54,55. Thus, our work paves way for utilising time crystals as tools for research, and as an integral part of hybrid systems for quantum technology.
Methods
Experimental setup
The sample container we use is a cylindrical quartz-glass tube (15 cm long, 2R = 5.85 mm diameter, Fig. 1). The 3He placed in the cylinder is cooled down by a nuclear demagnetisation refrigerator into the superfluid B phase. The lower end of the sample container connects to a volume of sintered silver powder surfaces, thermally linked to the nuclear refrigerant. This allows cooling the 3He in the cylinder down to 130 μK.
Temperature of the superfluid is measured using a quartz tuning fork29,56, immersed in the superfluid. In the low-temperature regime investigated in this manuscript, the fork’s resonance width depends linearly on the thermal excitation density, which in turn depends on temperature as \(\propto \exp (-\Delta /{k}_{{{\rm{B}}}}T)\), where Δ is the superfluid gap and kB is the Boltzmann constant. Additionally, we can utilise the relaxation rate of the bulk time crystal as a thermometer30—its relaxation rate likewise depends exponentially on temperature, \(\kappa \propto \exp (-\Delta /{k}_{{{\rm{B}}}}T)\).
The pressure of the superfluid sample is equal to saturated vapour pressure, which is vanishingly small at these low temperatures. The superfluid transition temperature at this pressure is Tc ≈ 0.93 mK. The transverse nuclear magnetic resonance (NMR) pick-up coil, placed around the sample container, is part of a tank circuit resonator with the quality factor of about 150. The setup includes also a pinch coil to create a minimum along the vertical axis of the otherwise homogeneous axial magnetic field. The resonance frequency of the tank circuit is 833 kHz in all measurements presented in this paper, corresponding to an external magnetic field of 25 mT. We use a cold preamplifier57 and room temperature amplifiers to amplify the voltage induced in the NMR coils.
The free surface is positioned 3 mm above the location of the magnetic field minimum. We adjust the liquid level by removing 3He starting from the originally fully filled sample container while measuring the pressure of 3He gas in a calibrated volume.
The time crystals are created by a short (~1 ms) excitation pulse via the NMR coils. The pulse is resonant with an excited state in the trap that confines the magnons (details of the trap are described below). In about 0.1 s, well after the end of the pump pulse, the magnons spontaneously form a time crystal on the ground state of the trap in a Bose-Einstein condensate phase transition. The time crystal frequency and magnon number can be inferred from the AC voltage induced in the NMR coils, originating from the coherent precession of magnetisation in the time crystal at ωTC. Details of the time crystal wave functions and signal readout are explained in ref. 11 and the Methods sections of Refs. 18,19.
Signal analysis
The precession of magnetisation in the time crystal produces a voltage signal in the pick-up coils. This signal is fed to a lock-in amplifier, which is typically locked 2–3 kHz above the time crystal’s precession frequency and is thus used for the frequency downconversion. The lock-in output is sampled at 48 kHz frequency. An example of such frequency-shifted record is shown in Fig. 1b. We transform the wave record to frequency space by a windowed fast Fourier transformation (FFT) with a 3 × 104 point window size and a 10% shift between windows.
We then trace the frequency of the central band in the FFT signal in time. In most cases this is the maximum of the FFT signal, but care should be taken at large mechanical drive amplitudes, where the sideband amplitude may exceed the central band amplitude. This trace is then used by the fitting algorithm.
The amplitude of the FFT spectrum is fit separately in each window to the FFT of the model signal \(U(t)=A\sin \int_{0}^{t}{\omega }_{{{\rm{TC}}}}({t}^{{\prime} })\,d{t}^{{\prime} }\) with ωTC from Eq. (1) and \(\theta (t)={\theta }_{\max }\sin {\omega }_{{{\rm{exc}}}}t\). The surface modulation frequency ωexc is determined from the FFT of the geophone record (see the next section), measured simultaneously with the time crystal signal. There are four fitting parameters: the overall amplitude A, combinations \(G=g{\theta }_{\max }^{2}\) and \(\Theta={\theta }_{0}{\theta }_{\max }^{-1}\) describing coupling to the surface mode and the average frequency 〈ωTC〉. Note that it is important for the proper fit to allow ω0 in Eq. (1) to depend on time as magnons are decaying from the trap, since the widths of the spectral bands are affected by this time dependence, especially near the beginning of the signal. From a single fitting parameter 〈ωTC〉 for a window, we model ω0(t) using time dependence of the traced frequency described above.
Mechanical forcing and calibration
A simplified schematic of the sample positioning and the mechanical support is shown in Supplementary Fig. 1 (See Supplemental Information). The cryostat is levitated on top of four active air spring dampers with attached distance sensors. These dampers are normally used to isolate the cryostat from mechanical vibrations in the surrounding support structures. The sensors feed their output to a proportional-integral-derivative (PID) controller. To induce mechanical forcing, we modulate the set point of one of the air springs as \({A}_{{{\rm{nom}}}}\sin ({\omega }_{{{\rm{exc}}}}t)\) resulting in small deviations of the cryostat’s tilt angle with the drive frequency ωexc. The air springs are located at 90 cm radius and approximately 1.65 metres above the liquid surface in the sample cell. The support frame itself is rigid, resulting in nearly horizontal oscillations of the sample. Similar mechanical forcing has been applied previously for surface wave studies in superfluid 3He and 4He28.
We calibrate the tilt angle by attaching a laser pointer to the cryostat and applying a static tilt by changing the setpoint of the airspring we use for modulation. We then monitor the position of the laser pointer at fixed distance and calculate the corresponding tilt angle. This way, we are able to apply tilt angles ≲1.2°. In dynamic measurements, the applied setpoint shifts are kept well below this value. For recording amplitude of the dynamic drive, the cryostat is equipped with the geophone. It is installed at room temperature on the level of the air spring dampers, and thus conversion of the geophone signal to the surface oscillation amplitude requires calibration described below.
We connect the nominal mechanical forcing amplitude Anom to the motion of the cryostat using a voltage Vgp produced by the geophone. The result is shown in Supplementary Fig. 2 (See Supplemental Information) from the same data set as in Fig. 3 of the main text. We find that the mechanical motion amplitude is well described by a function of the form
which contains three fitting parameters: a scale factor C, free exponent ν, and constant B to allow for non-zero base level in the measured voltage.
Converting the mechanical forcing as measured by the geophone to excitation of the free surface motion can be done in three steps. If we drive the surface mode on resonance, the applied drive power is equal to dissipated power. The dissipation is observed as a heat flow into the superfluid, originating from the free surface motion. The resulting temperature gradient can be measured directly by comparing the temperature measured by the thermometer fork at the bottom of the container and using the time crystal as a thermometer at the top of the container30, see Supplementary Fig. 3a (See Supplemental Information).
The temperature gradient can be converted to power using the known thermal conductivity of superfluid 3He-B in a cylindrical container31. The thermal resistance of 3He-B at similar experimental conditions (pressure, temperature, magnetic field) was measured to be \(R'_{\rm T} \approx 0.15\,\mu\)K pW−1 for a 5-cm-long cylindrical container with 8 mm diameter. Our cylindrical container has a ≈ 6 mm diameter and the magnon condensate is located some ≈ 14 cm above the bottom volume containing the thermometer fork. Scaling the thermal resistance with the lengths and inverse square radii, we get an estimate RT ≈ 0.75 μK pW−1 between the magnon time crystal and the heat exchanger volume in our experimental geometry.
The power can be converted into a range of motion as follows. The fraction of energy lost per cycle in a damped harmonic oscillator is
where Q is the quality factor of the oscillator. The quality factor estimated as the temperature dependent part of the dependence shown in Fig. 2 gives Q ≈ 375, while the total quality factor, including the zero-temperature offset for the surface wave resonance width, is Q ≈ 65. The gravity potential energy stored in the free surface motion at the maximum amplitude of the oscillation cycle is
where ρHe = 81.9 kg m−3 is the density of the superfluid58 and gg = 9.81 m s−2 is the free-fall acceleration. Thus, the dissipation power becomes
which yields \(P/{\theta }_{\max }^{2}\approx 8.1\,\) pW deg−2 for the total quality factor Q ≈ 65.
We can now express the measured temperature difference \(\Delta \tilde{T}({A}_{{{\rm{exc}}}})=\Delta {T}_{{{\rm{TC}}}}({A}_{{{\rm{exc}}}})-\Delta {T}_{{{\rm{fork}}}}\), where Aexc = Vgp(Anom)/Vgp(Anom = 0.098) is the normalised amplitude, as
Thus, drive amplitude is determined as \({\theta }_{\max }^{2}{{{\rm{(deg)}}}}^{2}\approx \Delta \tilde{T}/6.1\,\mu\)K. To obtain direct relation between \({\theta }_{\max }\) and Aexc (and thus Vgp), we perform a single parameter fit shown in Supplementary Fig. 3b (See Supplemental Information), resulting in \({\theta }_{\max }^{2}{{{\rm{(deg)}}}}^{2}\approx 2.62\,{A}_{{{\rm{exc}}}}\). In analysis and plotting of the data in the main text as a function of the drive amplitude \({\theta }_{\max }\), we convert applied excitation Anom to Vgp and then to \({\theta }_{\max }\) using calibration expressions above.
In Figure 3d the upper edge of the shaded areas correspond to the calibration obtained as explained above, using the full Q ≈ 65. This calibration is used for \({\theta }_{\max }\) scale in other panels of Fig. 3. In general, we may expect some of the dissipated heat to be carried away by a layer of surface bound states on the walls of the container and the free surface34,59. The temperature-independent part of dissipation is generated at the surfaces. If all of this heat is carried away along the surface, never entering the bulk, then Q ≈ 375 will be appropriate to calibrate the tilt angles instead. The lower edge of the shaded regions in Fig. 3d corresponds to this limit. It is plausible that only a part of the generated heat escapes the bulk, and these two extreme limits we take as uncertainty of the calibration, which determines uncertainty range of the determined optomechanical coupling g.
If we postulate that for the surface time crystal static and dynamic coupling coincide, we can fit the dynamic coupling to the static measurements to pick up a particular heat release fraction from the uncertainty band. The fit shown by the dashed line in Fig. 3d gives gsurf ≈ 3.74 Hz deg−2. This value corresponds to 84% of the temperature-independent part of the dissipated heat being carried away by the surface bound states. From the total dissipation at the lowest experimental temperature this makes 69%.
Gravity wave resonances
For inviscid, incompressible, and irrotational flow, the dispersion of gravity waves in a cylindrical container much deeper than its diameter is given by60
where ki is the wave number, and σ = 155 μN/m is the surface tension of 3He61.
The velocity field u related to a scalar potential ϕ can be calculated as
For an infinitely deep cylindrical container, the potential associated with the planar fundamental mode is62
where \(A={\omega }_{{{\rm{m}}}}{\theta }_{\max }{k}_{1}^{-2}\) is the wave amplitude, Ji is the Bessel function of the first kind or order i, k1 is the wave number of the fundamental mode, z is the vertical coordinate (z = 0 at fluid surface, negative values towards the fluid), and φ is the azimuthal angle.
The resulting velocity field is then
which additionally sets the magnitude of k1 by requiring the radial flow to be zero at the container wall. In other words, the wave number k1 is the first solution to equation
setting k1 ≈ 1.8412/R.
Taking into account the meniscus effect, the gravity wave dispersion relation is modified to63
For the lowest mode with k1, we get ωSWm/2π ≈ 12.4 Hz, in good agreement with experimental observations.
Surface wave oscillations near the container axis
The surface height profile of the first mode takes the form64
To derive the maximum tilt angle during the time evolution of the surface wave, we set \(\sin \varphi=1\). We can estimate the tilt angle θ from the radial derivative of Eq. (M12):
Solving for θ and taking the limit r → 0 (the time crystal is located close to r = 0), to leading order we get
where the last approximation results from Ak1/2 ≪ 1. Therefore, we arrive to
where we have set \({\theta }_{\max }\equiv A{k}_{1}/2\). This is the time dependence used in the main text.
Magnon trapping potential
The axial trapping potential for (optical) magnons in the superfluid is set by the magnetic field profile as
where ωL is the local Larmor frequency and γ is the gyromagnetic ratio of 3He. The magnetic field profile is created with a solenoid creating a field with inhomogeneity on the level of 10−4, and by a pinch coil which produces a local minimum in the magnetic field along the vertical axis, shown in Fig. 1.
The radial trapping potential is set by the textural configuration via the spin-orbit interaction
where ΩL is the B-phase Leggett frequency and βL is the polar angle of the Cooper pair orbital angular momentum, measured from the direction of the static magnetic field. In the absence of gravity waves, the minimum energy configuration corresponds to the so-called flare-out texture65. For low magnon numbers, such as at the end of the time crystals’ decay in our experiments, the flare-out texture with βL ∝ r near the axis results in an approximately harmonic trapping potential with a characteristic size set by the magnetic healing length ξH26. However, for large magnon numbers, the potential is heavily modified and can even become self-bound11,66 or box-like26. The total trapping potential is a combination of the magnetic and textural parts.
For zero or low pinch coil currents the magnetic part of the potential becomes less important than the textural part. The surface energy orients the orbital angular vector perpendicular to the surface, setting βL = π/2 at container walls and βL = 0 at the free surface. The spatial variation of βL creates the surface trap, which can additionally be identified by the faster magnon relaxation rate18.
Optomechanical Hamiltonian
We describe the combination of a time crystal in the superlfuid trap and the moving free surface as an optomechanical system with the Hamiltonian
where \({\hat{a}}^{{\dagger} }\) and \(\hat{a}\) are magnon creation and annihilation operators, \({\hat{b}}^{{\dagger} }\) and \(\hat{b}\) are mechanical mode quanta (here ripplons) creation and annihilation operators, g1 and g2 are the linear and quadratic coupling constants, respectively, and ωm corresponds to the resonance frequency of the mechanical mode. The first “cavity” term on the right-hand-side originates from equivalence of the time crystal frequency and magnon chemical potential for magnon CTC. We follow approach of Ref. 67 but the laser-drive-like terms are not relevant to our experiments and do not appear in Eq. (M18).
Eq. (1) in the main text can be derived from Eq. (M18) by the following substitutions: g2 → g, g1 → 2gθ0, and \({\tilde{\omega }}_{{{\rm{TC}}}}\to {\omega }_{{{\rm{0}}}}+2\pi g{\theta }_{0}^{2}\), where θ0 is an effective static tilt of the surface in the absence of oscillations. Thus, tilting the free surface with respect to the gravity potential results in the modulation of the time crystal frequency. Note that by changing geometry (expressed as θ0), the coupling can be smoothly tuned from quadratic to predominantly linear.
For mechanical motion as given in Eq. (M15), we get
where ΔωTC = ωTC(t) − ω0. From Eq. (M19), one can see that there are components at both ω and 2ω. The average frequency reads
that is, the mean frequency increases as \(\propto \frac{1}{2}g{\theta }_{\max }^{2}\). The origin of g from free-energy considerations in the superfluid is discussed in the supplemental material.
Data availability
The data used in this study are available in the Zenodo database under accession code DOI:10.5281/zenodo.16947851.
References
Wilczek, F. Quantum time crystals. Phys. Rev. Lett. 109, 160401 (2012).
Sacha, K. & Zakrzewski, J. Time crystals: a review. Rep. Prog. Phys. 81, 016401 (2017).
Bruno, P. Impossibility of spontaneously rotating time crystals: a no-go theorem. Phys. Rev. Lett. 111, 070402 (2013).
Watanabe, H. & Oshikawa, M. Absence of quantum time crystals. Phys. Rev. Lett. 114, 251603 (2015).
Kongkhambut, P. et al. Observation of a continuous time crystal. Science 377, 670–673 (2022).
Liu, T., Ou, J.-Y., MacDonald, K. F. & Zheludev, N. I. Photonic metamaterial analogue of a continuous time crystal. Nat. Phys. 19, 986–991 (2023).
Greilich, A. et al. Robust continuous time crystal in an electron-nuclear spin system. Nat. Phys. 20, 631–636 (2024).
Wu, X. et al. Dissipative time crystal in a strongly interacting Rydberg gas. Nat. Phys. 20, 1389–1394 (2024).
Carraro-Haddad, I. et al. Solid-state continuous time crystal in a polariton condensate with a built-in mechanical clock. Science 384, 995–1000 (2024).
Autti, S., Eltsov, V. B. & Volovik, G. E. Observation of a time quasicrystal and its transition to a superfluid time crystal. Phys. Rev. Lett. 120, 215301 (2018).
Mäkinen, J. T., Autti, S. & Eltsov, V. B. Magnon Bose-Einstein condensates: From time crystals and quantum chromodynamics to vortex sensing and cosmology. Appl. Phys. Lett. 124, 100502 (2024).
Zhang, J. et al. Observation of a discrete time crystal. Nature 543, 217–220 (2017).
Mi, X. et al. Time-crystalline eigenstate order on a quantum processor. Nature 601, 531–536 (2021).
Wang, X. et al. Metasurface-based realization of photonic time crystals. Sci. Adv. 9, eadg7541 (2023).
Giergiel, K. et al. Creating big time crystals with ultracold atoms. N. J. Phys. 22, 085004 (2020).
Smits, J., Liao, L., Stoof, H. T. C. & van der Straten, P. Observation of a space-time crystal in a superfluid quantum gas. Phys. Rev. Lett. 121, 185301 (2018).
Kreil, A. J. E. et al. Tunable space-time crystal in room-temperature magnetodielectrics. Phys. Rev. B 100, 020406 (2019).
Autti, S. et al. AC Josephson effect between two superfluid time crystals. Nat. Mater. 20, 171–174 (2021).
Autti, S. et al. Nonlinear two-level dynamics of quantum time crystals. Nat. Commun. 13, 3090 (2022).
Giergiel, K., Hannaford, P. & Sacha, K. Time-tronics: from temporal printed circuit board to quantum computer. arXiv preprint arXiv:2406.06387 (2024).
Aspelmeyer, M., Kippenberg, T. J. & Marquardt, F. Cavity optomechanics. Rev. Mod. Phys. 86, 1391–1452 (2014).
Shkarin, A. B. et al. Quantum optomechanics in a liquid. Phys. Rev. Lett. 122, 153601 (2019).
Volovik, G. E. Twenty years of magnon Bose condensation and spin current superfluidity in 3He-B. J. Low. Temp. Phys. 153, 266 (2008).
Bunkov, Yu. M. & Volovik, G. E. Spin superfluidity and magnon Bose-Einstein condensation. In Bennemann, K. H. & Ketterson, J. B. (eds.) Novel Superfluids, vol. 1 of International Series of Monographs on Physics 156, chap. 4, 253–311 (Oxford University Press, London, 2013).
Thompson, J. D. et al. Strong dispersive coupling of a high-finesse cavity to a micromechanical membrane. Nature 452, 72–75 (2008).
Autti, S. et al. Self-trapping of magnon Bose-Einstein condensates in the ground state and on excited levels: From harmonic to box confinement. Phys. Rev. Lett. 108, 145303 (2012).
Heikkinen, P. J. et al. Relaxation of Bose-Einstein condensates of magnons in magneto-textural traps in superfluid 3He-B. J. Low. Temp. Phys. 175, 3 (2014).
Manninen, M. S., Rysti, J., Todoshchenko, I. & Tuoriniemi, J. Quasiparticle damping of surface waves in superfluid 3He and 4He. Phys. Rev. B 90, 224502 (2014).
Blaauwgeers, R. et al. Quartz tuning fork: thermometer, pressure- and viscometer for helium liquids. J. Low. Temp. Phys. 146, 537 (2007).
Heikkinen, P. J., Autti, S., Eltsov, V. B., Haley, R. P. & Zavjalov, V. V. Microkelvin thermometry with Bose-Einstein condensates of magnons and applications to studies of the AB interface in superfluid 3He. J. Low. Temp. Phys. 175, 681 (2014).
Martin, H. Experiments on the thermal transport properties of superfluid 3He at ultra-low temperatures. Ph.D. thesis, Doctoral dissertation, Lancaster University, UK (2006).
De Graaf, R., Eltsov, V., Heikkinen, P., Hosio, J. & Krusius, M. Textures of superfluid 3He-B in applied flow and comparison with hydrostatic theory. J. Low. Temp. Phys. 163, 238–261 (2011).
Thuneberg, E. V. Hydrostatic theory of superfluid 3He-B. J. Low. Temp. Phys. 122, 657 (2001).
Autti, S. et al. Transport of bound quasiparticle states in a two-dimensional boundary superfluid. Nat. Commun. 14, 6819 (2023).
Barzanjeh, S. et al. Optomechanics for quantum technologies. Nat. Phys. 18, 15–24 (2022).
Abramovici, A. et al. Ligo: the laser interferometer gravitational-wave observatory. Science 256, 325–333 (1992).
Accadia, T. et al. Virgo: a laser interferometer to detect gravitational waves. J. Instrum. 7, P03012 (2012).
Akutsu, T. et al. Overview of KAGRA: detector design and construction history. Prog. Theor. Exp. Phys. 2021, 05A101 (2020).
Piotrowski, J. et al. Simultaneous ground-state cooling of two mechanical modes of a levitated nanoparticle. Nat. Phys. 19, 1009–1013 (2023).
de Lépinay, L. M., Ockeloen-Korppi, C. F., Woolley, M. J. & Sillanpää, M. A. Quantum mechanics-free subsystem with mechanical oscillators. Science 372, 625–629 (2021).
Chen, D., Peng, Z., Li, J., Chesi, S. & Wang, Y. Discrete time crystal in an open optomechanical system. Phys. Rev. Res. 6, 013130 (2024).
Machado, J. D. P., Slooter, R. J. & Blanter, Y. M. Quantum signatures in quadratic optomechanics. Phys. Rev. A 99, 053801 (2019).
Fortier, T. & Baumann, E. 20 years of developments in optical frequency comb technology and applications. Commun. Phys. 2, 153 (2019).
Lesko, D. M. B. et al. A six-octave optical frequency comb from a scalable few-cycle erbium fibre laser. Nat. Photonics 15, 281–286 (2021).
Saglamyurek, E. et al. Storing short single-photon-level optical pulses in Bose-Einstein condensates for high-performance quantum memory. N. J. Phys. 23, 043028 (2021).
Gao, C. et al. Axion wind detection with the homogeneous precession domain of superfluid helium-3. Phys. Rev. Lett. 129, 211801 (2022).
Baker, C. G. et al. Optomechanical dark matter instrument for direct detection. Phys. Rev. D. 110, 043005 (2024).
Mäkinen, J. T. et al. Half-quantum vortices and walls bounded by strings in the polar-distorted phases of topological superfluid 3He. Nat. Commun. 10, 237 (2019).
Ivanov, D. A. Non-abelian statistics of half-quantum vortices in p-wave superconductors. Phys. Rev. Lett. 86, 268–271 (2001).
Kamppinen, T., Mäkinen, J. T. & Eltsov, V. B. Superfluid 4He as a rigorous test bench for different damping models in nanoelectromechanical resonators. Phys. Rev. B 107, 014502 (2023).
Hao Jiang, T. & Jing, J. Realising mechanical dynamical casimir effect with low-frequency oscillator. Phys. Rev. A 111, 022811 (2025).
Lambrecht, A., Jaekel, M.-T. & Reynaud, S. Motion induced radiation from a vibrating cavity. Phys. Rev. Lett. 77, 615–618 (1996).
Yamamoto, K. et al. Non-reciprocal pumping of surface acoustic waves by spin wave resonance. J. Phys. Soc. Jpn. 89, 113702 (2020).
Kansanen, K. S. U., Tassi, C., Mishra, H., Sillanpää, M. A. & Heikkilä, T. T. Magnomechanics in suspended magnetic beams. Phys. Rev. B 104, 214416 (2021).
Borisenko, I. V. et al. Direct evidence of spatial stability of Bose-Einstein condensate of magnons. Nat. Commun. 11, 1691 (2020).
Blažková, M. et al. Vibrating quartz fork: a tool for cryogenic helium research. J. Low. Temp. Phys. 150, 525–535 (2008).
Heikkinen, P. J. Magnon Bose-Einstein condensate as a probe of topological superfluid. Ph.D. thesis, Aalto University School of Science https://aaltodoc.aalto.fi/handle/123456789/20580. (2016).
Wheatley, J. C. Experimental properties of superfluid 3He. Rev. Mod. Phys. 47, 415 (1975).
Autti, S. et al. Fundamental dissipation due to bound fermions in the zero-temperature limit. Nat. Commun. 11, 4742 (2020).
Case, K. M. & Parkinson, W. C. Damping of surface waves in an incompressible liquid. J. Fluid Mech. 2, 172 (1957).
Matsumoto, K., Okuda, Y., Suzuki, M. & Misawa, S. Surface tension maximum of liquid 3He – Experimental study. J. Low. Temp. Phys. 125, 59 (2001).
Michel, G. Three-wave interactions among surface gravity waves in a cylindrical container. Phys. Rev. Fluids 4, 012801 (2019).
Nicolás, J. A. Effects of static contact angles on inviscid gravity-capillary waves. Phys. Fluids 17, 022101 (2005).
Miles, J. W. Internally resonant surface waves in a circular cylinder. J. Fluid Mech. 149, 1–14 (1984).
Smith, H., Brinkman, W. F. & Engelsberg, S. Textures and NMR in superfluid 3He-(B). Phys. Rev. B 15, 199–213 (1977).
Autti, S., Heikkinen, P. J., Volovik, G. E., Zavjalov, V. V. & Eltsov, V. B. Propagation of self-localized Q-ball solitons in the 3He universe. Phys. Rev. B 97, 014518 (2018).
Amitai, E., Lörch, N., Nunnenkamp, A., Walter, S. & Bruder, C. Synchronization of an optomechanical system to an external drive. Phys. Rev. A 95, 053858 (2017).
Forstner, S. et al. Dynamic interaction between chiral currents and surface waves in topological superfluids: a pathway to detect Majorana fermions? https://arxiv.org/abs/2403.19469. (2024).
Acknowledgements
We thank G. E. Volovik, M. Krusius, M. A. Silaev, I. A. Todoshchenko, M. S. Manninen, J. T. Tuoriniemi, and L. Mercier de Lépinay for stimulating discussions. The research was done using facilities of the OtaNano infrastructure supported by the Aalto University. We acknowledge the computational resources provided by the Aalto Science-IT project. The work is supported by the Research Council of Finland with Project No. 370532 (V. B. Eltsov). J. T. Mäkinen acknowledged financial support from Research Council of Finland with Project No. 370493, P. J. Heikkinen acknowledges financial support from the Väisälä foundation of the Finnish Academy of Science and Letters and from the Finnish Cultural Foundation, and S. Autti acknowledges financial support from the UK EPSRC (EP/W015730/1) and Jenny and Antti Wihuri Foundation.
Author information
Authors and Affiliations
Contributions
The manuscript was written by J.T.M. and S.A., with contributions from P.J.H. and V.B.E. Experiments were conducted by P.J.H., S.A., V.V.Z., and V.B.E. Theoretical analysis was led by J.T.M., with contributions from P.J.H., S.A., and V.B.E. J.T.M. analysed the data and prepared the figures. The project was supervised by V.B.E. All authors discussed the results.
Corresponding author
Ethics declarations
Competing interests
The authors declare no competing interests.
Peer review
Peer review information
Nature Communications thanks the anonymous reviewers for their contribution to the peer review of this work. A peer review file is available.
Additional information
Publisher’s note Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Supplementary information
Rights and permissions
Open Access This article is licensed under a Creative Commons Attribution-NonCommercial-NoDerivatives 4.0 International License, which permits any non-commercial use, sharing, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons licence, and indicate if you modified the licensed material. You do not have permission under this licence to share adapted material derived from this article or parts of it. The images or other third party material in this article are included in the article’s Creative Commons licence, unless indicated otherwise in a credit line to the material. If material is not included in the article’s Creative Commons licence and your intended use is not permitted by statutory regulation or exceeds the permitted use, you will need to obtain permission directly from the copyright holder. To view a copy of this licence, visit http://creativecommons.org/licenses/by-nc-nd/4.0/.
About this article

Cite this article
Mäkinen, J.T., Heikkinen, P.J., Autti, S. et al. Continuous time crystal coupled to a mechanical mode as a cavity-optomechanics-like platform. Nat Commun 16, 9050 (2025). https://doi.org/10.1038/s41467-025-64673-8
Received:
Accepted:
Published:
Version of record:
DOI: https://doi.org/10.1038/s41467-025-64673-8
