
Abstract
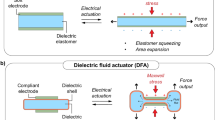
Soft actuators enable versatile and adaptable robots capable of operating in unstructured environments and close to humans. Soft electrostatic actuators utilizing electrohydraulic principles are particularly promising, combining all-around actuation performance with portable driving electronics. These electrohydraulic actuators harness liquid dielectrics enclosed in solid dielectric shells to sustain high electric fields; the liquid dielectric however constitutes most of the actuator mass, limiting power-to-weight ratio. Here, we present ultralight soft electrostatic actuators based on solid-liquid-gas architectures: the introduction of gaseous dielectrics as a third phase substantially improves power-to-weight ratio by reducing actuator mass and increasing actuation speed. Through theoretical and experimental analyses, we pinpoint the fundamental performance limit as the electrical breakdown in the gas, governed by Paschen’s law, thereby providing a guideline for selection of gaseous dielectrics. Using the Peano-HASEL (hydraulically amplified self-healing electrostatic) actuator as a model system, we identify a gas mixture of C4F7N and CO2 that enables outstanding specific energy of 51.4 J kg-1 (a nine-fold improvement over conventional Peano-HASELs); using ambient air as gaseous dielectric we still achieve 33.5 J kg-1 and a power-to-weight ratio of 1600 W kg-1 (a five- and eleven-fold improvement). We illustrate these enhanced performance metrics in a jumping robot, showing a 60% increase in jump height, highlighting the wide potential of ultralight soft electrostatic actuators for adaptable and agile robotic systems.
Similar content being viewed by others


Data availability
Measured data and analysis code used to generate the main text figures are available in a public repository at https://doi.org/10.17617/3.83PLAQ. Source data are provided in this paper.
References
Royakkers, L. & van Est, R. A literature review on new robotics: automation from love to war. Int. J. Soc. Robot. 7, 549–570 (2015).
Matthias, B., Oberer-Treitz, S., Staab, H., Schuller, E. & Peldschus, S. Injury risk quantification for industrial robots in collaborative operation with humans. In ISR 2010 (41st International Symposium on Robotics) and ROBOTIK 2010 (6th German Conference on Robotics). 1–6 (VDE).
Ilievski, F., Mazzeo, A. D., Shepherd, R. F., Chen, X. & Whitesides, G. M. Soft robotics for chemists. Angew. Chem. 123, 1930–1935 (2011).
Rus, D. & Tolley, M. T. Design, fabrication and control of soft robots. Nature 521, 467–475 (2015).
Rogers, J. A., Someya, T. & Huang, Y. Materials and mechanics for stretchable electronics. Science 327, 1603–1607 (2010).
Kim, D.-H. et al. Epidermal electronics. Science 333, 838–843 (2011).
Kim, S., Laschi, C. & Trimmer, B. Soft robotics: a bioinspired evolution in robotics. Trends Biotechnol. 31, 287–294 (2013).
Laschi, C., Mazzolai, B. & Cianchetti, M. Soft robotics: Technologies and systems pushing the boundaries of robot abilities. Sci. Robot. 1, eaah3690 (2016).
Whitesides, G. M. Soft Robotics. Angew. Chem. Int. Ed. 57, 4258–4273 (2018).
Mirvakili, S. M. & Hunter, I. W. Artificial muscles: Mechanisms, applications, and challenges. Adv. Mater. 30, 1704407 (2018).
Li, M., Pal, A., Aghakhani, A., Pena-Francesch, A. & Sitti, M. Soft actuators for real-world applications. Nat. Rev. Mater. 7, 235–249 (2022).
Tondu, B. Modelling of the McKibben artificial muscle: A review. J. Intell. Mater. Syst. Struct. 23, 225–253 (2012).
Li, S., Vogt, D. M., Rus, D. & Wood, R. J. Fluid-driven origami-inspired artificial muscles. Proc. Natl. Acad. Sci. USA 114, 13132–13137 (2017).
Connolly, F., Walsh, C. J. & Bertoldi, K. Automatic design of fiber-reinforced soft actuators for trajectory matching. Proc. Natl. Acad. Sci. USA 114, 51–56 (2017).
Wang, Y. et al. Stimuli-responsive composite biopolymer actuators with selective spatial deformation behavior. Proc. Natl. Acad. Sci. USA 117, 14602–14608 (2020).
Chu, H. et al. Unipolar stroke, electroosmotic pump carbon nanotube yarn muscles. Science 371, 494–498 (2021).
Haines, C. S. et al. Artificial muscles from fishing line and sewing thread. Science 343, 868–872 (2014).
Jin, B. et al. Programming a crystalline shape memory polymer network with thermo-and photo-reversible bonds toward a single-component soft robot. Sci. Adv. 4, eaao3865 (2018).
Ford, M. J. et al. A multifunctional shape-morphing elastomer with liquid metal inclusions. Proc. Natl. Acad. Sci. USA 116, 21438–21444 (2019).
Kotikian, A. et al. Liquid crystal elastomer lattices with thermally programmable deformation via multi-material 3D printing. Adv. Mater. 36, 2310743 (2024).
Duduta, M., Hajiesmaili, E., Zhao, H., Wood, R. J. & Clarke, D. R. Realizing the potential of dielectric elastomer artificial muscles. Proc. Natl. Acad. Sci. USA 116, 2476–2481 (2019).
Sîrbu, I.-D. et al. Electrostatic bellow muscle actuators and energy harvesters that stack up. Sci. Robot. 6, eaaz5796 (2021).
Mitchell, S. K., Martin, T. & Keplinger, C. A pocket-sized ten-channel high voltage power supply for soft electrostatic actuators. Adv. Mater. Technol. 7, 2101469 (2022).
Carpi, F. et al. Standards for dielectric elastomer transducers. Smart Mater. Struct. 24, 105025 (2015).
Pelrine, R., Kornbluh, R., Pei, Q. & Joseph, J. High-speed electrically actuated elastomers with strain greater than 100%. Science 287, 836–839 (2000).
Carpi, F., De Rossi, D., Kornbluh, R., Pelrine, R. E. & Sommer-Larsen, P. Dielectric Elastomers as Alectromechanical Transducers: Fundamentals, Materials, Devices, Models and Applications of an Emerging Electroactive Polymer Technology. (Elsevier, 2011).
Chen, Y. et al. Controlled flight of a microrobot powered by soft artificial muscles. Nature 575, 324–329 (2019).
Li, G. et al. Self-powered soft robot in the Mariana Trench. Nature 591, 66–71 (2021).
Wu, E. Y. & Vollertsen, R.-P. On the Weibull shape factor of intrinsic breakdown of dielectric films and its accurate experimental determination. Part I: theory, methodology, experimental techniques. IEEE Trans. Electron Devices 49, 2131–2140 (2002).
Rothemund, P., Kellaris, N., Mitchell, S. K., Acome, E. & Keplinger, C. HASEL artificial muscles for a new generation of lifelike robots—recent progress and future opportunities. Adv. Mater. 33, 2003375 (2021).
Acome, E. et al. Hydraulically amplified self-healing electrostatic actuators with muscle-like performance. Science 359, 61–65 (2018).
Kellaris, N., Gopaluni Venkata, V., Smith, G. M., Mitchell, S. K. & Keplinger, C. Peano-HASEL actuators: Muscle-mimetic, electrohydraulic transducers that linearly contract on activation. Sci. Robot. 3, eaar3276 (2018).
Kellaris, N. et al. Spider-Inspired Electrohydraulic Actuators for Fast, Soft-Actuated Joints. Adv. Sci. 8, 2100916 (2021).
Wang, T. et al. A versatile jellyfish-like robotic platform for effective underwater propulsion and manipulation. Sci. Adv. 9, eadg0292 (2023).
Johnson, B. et al. A multifunctional soft robotic shape display with high-speed actuation, sensing, and control. Nat. Commun. 14, 4516 (2023).
Yoder, Z. et al. A soft, fast and versatile electrohydraulic gripper with capacitive object size detection. Adv. Funct. Mater. 33, 2209080 (2023).
Buchner, T. J. et al. Electrohydraulic musculoskeletal robotic leg for agile, adaptive, yet energy-efficient locomotion. Nat. Commun. 15, 1–14 (2024).
Sanchez-Tamayo, N. et al. Cutaneous electrohydraulic (CUTE) wearable devices for pleasant broad-bandwidth haptic cues. Adv. Sci. 11, 2402461 (2024).
Yoder, Z., Rumley, E. H., Schmidt, I., Rothemund, P. & Keplinger, C. Hexagonal electrohydraulic modules for rapidly reconfigurable high-speed robots. Sci. Robot. 9, eadl3546 (2024).
Leroy, E., Hinchet, R. & Shea, H. Multimode hydraulically amplified electrostatic actuators for wearable haptics. Adv. Mater. 32, 2002564 (2020).
Leroy, E. & Shea, H. Hydraulically amplified electrostatic taxels (haxels) for full body haptics. Adv. Mater. Technol. 8, 2300242 (2023).
Grasso, G., Rosset, S. & Shea, H. Fully 3D-printed, stretchable, and conformable haptic interfaces. Adv. Funct. Mater. 33, 2213821 (2023).
Taghavi, M., Helps, T. & Rossiter, J. Electro-ribbon actuators and electro-origami robots. Sci. Robot. 3, eaau9795 (2018).
Diteesawat, R. S., Helps, T., Taghavi, M. & Rossiter, J. Electro-pneumatic pumps for soft robotics. Sci. Robot. 6, eabc3721 (2021).
Helps, T., Romero, C., Taghavi, M., Conn, A. T. & Rossiter, J. Liquid-amplified zipping actuators for micro-air vehicles with transmission-free flapping. Sci. Robot. 7, eabi8189 (2022).
Kellaris, N., Venkata, V. G., Rothemund, P. & Keplinger, C. An analytical model for the design of Peano-HASEL actuators with drastically improved performance. Extreme Mech. Lett. 29, 100449 (2019).
Paschen, F. Über den Funkübergang in Luft: Wasserstoff und Kohlensäure bei verschiedenen Drücken erforderliche Potenzialdifferenz. (JA Barth, 1889).
Husain, E. & Nema, R. Analysis of Paschen curves for air, N2 and SF6 using the Townsend breakdown equation. IEEE Trans. Electr. Insul. 17, 350–353 (1982).
Rothemund, P., Kellaris, N. & Keplinger, C. How inhomogeneous zipping increases the force output of Peano-HASEL actuators. Extreme Mech. Lett. 31, 100542 (2019).
Rothemund, P., Kirkman, S. & Keplinger, C. Dynamics of electrohydraulic soft actuators. Proc. Natl. Acad. Sci. USA 117, 16207–16213 (2020).
Berger, L. Dielectric strength of insulating materials. Carbon 1, 2 (2006).
Sîrbu, I.-D. et al. Electrostatic actuators with constant force at low power loss using matched dielectrics. Nat. Electron. 6, 888–899 (2023).
Kao, K. The effects of a thin dielectric layer covering metallic electrodes on the electric breakdown characteristics of fluids. Br. J. Appl. Phys. 15, 1247 (1964).
Mitchell, S. K. et al. An easy-to-implement toolkit to create versatile and high-performance HASEL actuators for untethered soft robots. Adv. Sci. 6, 1900178 (2019).
Rabie, M. & Franck, C. M. Assessment of eco-friendly gases for electrical insulation to replace the most potent industrial greenhouse gas SF6. Environ. Sci. Technol. 52, 369–380 (2018).
Owens, J., Xiao, A., Bonk, J., DeLorme, M. & Zhang, A. Recent development of two alternative gases to SF6 for high voltage electrical power applications. Energies 14, 5051 (2021).
Madden, J. D. et al. Artificial muscle technology: physical principles and naval prospects. IEEE J. Ocean. Eng. 29, 706–728 (2004).
Mirfakhrai, T., Madden, J. D. & Baughman, R. H. Polymer artificial muscles. Mater. Today 10, 30–38 (2007).
Yoder, Z. et al. Design of a high-speed prosthetic finger driven by Peano-HASEL actuators. Front. Robot. AI. 181, https://doi.org/10.3389/frobt.2020.586216 (2020).
Wang, X., Mitchell, S. K., Rumley, E. H., Rothemund, P. & Keplinger, C. High-strain peano-HASEL actuators. Adv. Funct. Mater. 30, 1908821 (2020).
Safety Data Sheet, 3M™ Novec™ 4710 Insulating Gas. 3M Company: St. Paul, MN, USA (2019).
Acknowledgements
This work was supported by the Max Planck Society, Germany. We thank the International Max Planck Research School for Intelligent Systems (IMPRS-IS) for supporting H.-J.J. and T.F.
Funding
Open Access funding enabled and organized by Projekt DEAL.
Author information
Authors and Affiliations
Contributions
H.-J.J., P.R., and C.K. designed research; H.-J.J., T.F., and X.L. performed research; H.-J.J., T.F., X.L., A.S., S.J.A.K., and P.R. contributed new reagents/analytic tools; H.-J.J., T.F., and X.L. analyzed data; H.-J.J., T.F., X.L., A.S., S.J.A.K., P.R., and C.K. wrote the paper; P.R. and C.K. supervised the research.
Corresponding authors
Ethics declarations
Competing interests
C.K. is a coinventor on three patents, which cover the fundamentals and basic designs of HASEL actuators (assignee of all three patents is the Regents of the University of Colorado: US Patent 10995779B2, granted 2021-05-04; US Patent 11486421B2, granted 2022-11-01; and US Patent 11408452B2, granted 2022-08-09). C.K. is a cofounder of Artimus Robotics, a start-up company that commercializes HASEL actuators. The other authors declare that they have no competing interests.
Peer review
Peer review information
Nature Communications thanks Huiqi Shao, and the other anonymous reviewers for their contribution to the peer review of this work. A peer review file is available.
Additional information
Publisher’s note Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Source data
Rights and permissions
Open Access This article is licensed under a Creative Commons Attribution 4.0 International License, which permits use, sharing, adaptation, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons licence, and indicate if changes were made. The images or other third party material in this article are included in the article’s Creative Commons licence, unless indicated otherwise in a credit line to the material. If material is not included in the article’s Creative Commons licence and your intended use is not permitted by statutory regulation or exceeds the permitted use, you will need to obtain permission directly from the copyright holder. To view a copy of this licence, visit http://creativecommons.org/licenses/by/4.0/.
About this article

Cite this article
Joo, HJ., Fukushima, T., Li, X. et al. Ultralight soft electrostatic actuators based on solid-liquid-gas architectures. Nat Commun (2026). https://doi.org/10.1038/s41467-026-69463-4
Received:
Accepted:
Published:
DOI: https://doi.org/10.1038/s41467-026-69463-4
