
Abstract
Multi-target digital material design has been challenging due to the expansive design space and instability of traditional methods in satisfying multiple objectives. This work proposes and demonstrates a customizer based on a classifier-free, conditional denoising diffusion probability model (cDDPM) to efficiently create the layouts of digital materials meeting the design goal of multiple mechanical properties all together. A case study has been conducted based on a micro mechanical resonator with four pre-assigned resonant frequencies. Using 29,430 samples generated via finite element analysis (FEA), the cDDPM is trained to simultaneously customize up to four vibrational modes, achieving over 95% prediction accuracy. Furthermore, the cDDPM approach also shows superior performances in the single-target customization for up to 99% in prediction accuracy when compared with traditional conditional generative adversarial networks (cGANs). As such, the proposed design framework provides a highly customizable and robust methodology for the design of complicated digital materials.
Similar content being viewed by others

Introduction
The rapid development of additive manufacturing technologies such as 3D printing1,2,3 has produced highly refined and complex digital material structures. As manufacturing complexity greatly increases, traditional design methodologies encounter inevitable challenges in realizing optimal structural design among an extremely large number of possible solutions. For example, conventional approaches based on theoretical analysis4, bioinspiration5,6, or Edisonian methods7,8 are not effective to find global optimum for additive manufacturing. Recently, the concept of digital material (DM) has been introduced to integrate advanced design methods with additive manufacturing9,10. In principle, complex structures are discretized into a distribution of voxels to eliminate parameters related to macroscopic shapes, such as curvature and aspect ratio, and simple mathematical forms, such as matrices, are used in advanced design processes based on machine learning schemes. By leveraging neural networks, diverse and complex functions can construct and connect the underlying relationships between design inputs and outputs, which removes explicit physical explanations and accelerates design progresses. For instance, supervised learning schemes with efficient predictors have been utilized to speedily estimate the mechanical properties in the design process, such as stiffness and toughness11, thermal conductivity12, material defects13, and vibration frequency14 as compared with conventional numerical simulations. The inverse design problem of DM structures has also seen good progress by gradient-based topology optimizations15,16 and reinforcement learning approaches17. However, one drawback for these DM design approaches is that they have to be reevaluated from the beginning even if there is a small change in setting up the targets.
The rise of generative models offers a promising solution to this problem. By applying variational autoencoders (VAEs)18,19 and conditional generative adversarial networks (cGANs)20,21, a single model could address the single-target customization problem with a one-time effort. On the other hand, practical problems often involve multiple requirements and targets simultaneously. For example, DM designs may aim for a structure with both high stiffness and high toughness or a structure with precisely controlled frequency response across multiple vibrational modes, and either VAEs or cGANs struggle to provide effective solutions. Specifically, VAEs are based on a multivariate Gaussian distribution for all data, which often leads to suboptimal solutions. Meanwhile, cGANs require the simultaneous training of both generator and discriminator networks and suffer from mode collapse issues and the loss of diversity22,23,24. Recently, AI-based painting has utilized various generative models, including stable diffusion24 and DALLE-225 to successfully generate images by simulating the reverse process of physical diffusions for arbitrary image generations26,27. Furthermore, conditional diffusion models (CDMs) have been utilized for topology optimization28 and metamaterial design29, with superior performances over cGANs. In this work, the cDDPM26,30 algorithm is used to efficiently address multi-target customization challenges in DM designs. Specifically, a planar resonator structure is used as a case study to demonstrate efficient, stable, and accurate multi-target customization by simultaneously meeting four modal frequency requirements under various material and geometric constraints. A total of 29,430 FEA simulation cases are used as the dataset and feasible designs are obtained within 600 milliseconds with 95% accuracy for all four target frequencies via an A100 GPU. This case exemplifies the efficiency and accuracy of the proposed customization scheme which could be applicable for other DM design problems.
Results
System architecture
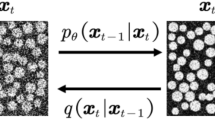
The system architecture follows a similar process in a text-to-image problem, where text descriptions are used as the target inputs and images containing these descriptions are the outputs. Specifically, the proposed customizer accepts a series of target properties as the inputs while designs meeting these requirements are the outputs as illustrated in Fig. 1a. Using a planar resonator structure in a typical MEMS (Microelectromechanical Systems) surface manufacturing process31,32 as an example, this pixelated system consists of an anchor at the center, an outer ring, and an adjustable labyrinth-like pattern between them33,34. Appropriate patterns are to be generated to endow the resonator with target frequencies corresponding to one or more vibrational modes. The denoising process starts with pixelated random noises and continues with the generation of labyrinth-like patterns, which gradually evolve into coarse structures and later fine structures. Random orphan pixels are gradually agglomerated into larger pixel blocks to form intricate beam structures. The flow chart is depicted in Fig. 1b. The denoising process operates in the continuous floating-point space and begins with a Gaussian noise, \({x}_{N}\), which is a randomly sampled representation constituting one quarter of a labyrinth-like pattern under the symmetry constraint. A trained U-Net performs denoising at each step, with network parameters modified based on the current time step, \(t\), and target property, \(c\), to progressively refine the design from \({x}_{t}\) to \({x}_{t-1}\). The U-Net follows a standard encoder-decoder structure with advanced features such as time embedding, condition embedding, attention mechanism, and residual connection to enhance learning. After \(N=800\) denoising steps, the process concludes at \(t=0\) and outputs the desired design \({x}_{0}\). The details of the network architecture and the training process are provided in Methods section and Figs. S1 and 2.

a The core process starts with random noises and progresses through coarse and fine structure formations to generate the desired DM designs. Target properties, such as resonant frequencies of specific vibrational modes, guide the denoising process to customize DM structures. The example shows a disk-shaped resonator with a labyrinth-like pattern. b The detailed architecture consists of a U-Net model, where the denoising process begins with a Gaussian noise input, \({x}_{N}\), representing a quarter of the labyrinth-like pattern with the symmetric constraint. The U-Net progressively refines this pattern through 800 denoising steps with fully connected layers that encode target properties and time representations. The process concludes at \(t=0\), for the final design, \({x}_{0}\).
Dataset preparation
A total of 29,430 resonators are randomly generated by the depth-first search (DFS) approach, starting from the center anchor and extending to the outer ring with fully connected labyrinth under material and geometric constraints. A representative resonator is shown in Fig. S3. The resonator structure is made of 2 μm-thick polycrystalline silicon, with a Young’s modulus of 150 GPa, a density of 2.3 × 103 kg/m3, and a Poisson’s ratio of 0.29. The anchor is placed at the center by a square-shape stem with a side length of 1.76 μm and a thickness of 0.7 μm. The outer ring has the inner and outer diameter of 30.8 μm and 44.0 μm respectively. The connection points between springs and the outer ring are fixed, and the entire structure has two symmetrical axes. Both the beam width and the gap between the beams are 0.88 μm34,35,36. Finite element analysis (FEA) simulations are used to calculate the resonant frequencies of each vibrational mode for every resonator and serve as “ground truth” labels. With parallelization and an Intel® Core™ Ultra 9 185H CPU (2.30 GHz), all simulations are completed in approximately 12 h. Figure 2 shows four representative fundamental modes, including the X-tilting and Y-tilting (torsion around two symmetric axes), Rotational (rotating around the central axis), and Flexural mode (vertical oscillation). All motions can be decomposed into translational motions along the x, y, and z axes as \({X}_{T}\), \({Y}_{T}\), and \({Z}_{T},\) and rotational motions along with these axes as \({X}_{R}\), \({Y}_{R}\), and \({Z}_{R}\), while the mass participating in each motion is referred as the effective mass of the vibrational mode. In the X-tilting mode, the effective mass is mainly concentrated in the y-direction translation and rotation about the x-axis. In the Y-tilting mode, the effective mass is concentrated in the x-direction translation and rotation about the y-axis. The Rotational mode and Flexural mode are primarily concentrated in rotation about the z-axis and translation in the z-direction, respectively. By comparing the effective mass distribution from the natural frequency analysis across different modes, automated mode identification and extraction can be achieved (see details in Methods section).

Finite element analysis (FEA) simulated mode shapes (left) and effective masses (the subscript T denotes translation in the corresponding direction, while the subscript R represents rotation in the corresponding direction) for: a the X-tilting mode, b the Y-tilting mode, c the Rotational mode, and d the Flexural mode. The units of the effective mass components are in kilograms (kg), for both translational and rotational motions. The differences in effective mass distribution across various vibrational modes are used for the automatic extraction of each mode’s frequency.
Single-target customization
For the single-target customization, design results for the X-tilting mode are shown in Fig. 3a. The left side plot is the structural frequency versus the target frequency, where each point represents the best candidate selected from 32 generated candidates (the same batch size is used for the multi-target customization in this work) to achieve a high matching accuracy of over 99% throughout the feasible design domain by using FEA results as “ground truths”. When the target frequency falls into the physically infeasible domain (either too high or too low), the accuracy drops sharply and forms two nearly flat regions parallel to the x-axis. The blue, green and purple arrows are structures for lower bound, midpoint, and upper bound frequencies, respectively, and they satisfy all material and geometric constraints, including the beam width, gap distance, connectivity of the labyrinth-like pattern, and the connection points at the outer ring. The effective stiffness of the labyrinth-like patterns influences the resonant frequency. For example, a low-frequency design typically features a long beam along the x-axis near the central anchor, while a high-frequency design typically has a long beam along the y-axis at the center. These asymmetric structures in the diagonal direction help reducing the stiffness in one direction while increasing the stiffness in the perpendicular direction. The single-target customization results for the Y-tilting, Rotational, and Flexural modes are presented in Fig. S4 with an accuracy of better than 99% across the entire physically feasible domain for all modes.

a The left plot shows the single-target customization accuracy of the X-tilting mode frequency versus the target frequency. The generated design examples on the right side for the lower bound (blue), midpoint (green), and upper bound (purple) X-tiling mode frequencies, with arrows of the same matching color in the left figure. b The left heatmap illustrates the dual-target customization accuracy for X-tilting and Y-tilting modes, with 90% (black) and 95% (red) iso-accuracy lines. The generated design examples on the right for different frequency combinations with same matching color arrows in the left figure. c The left plot shows multi-sectional heatmaps for the triple-target customization accuracy of X-tilting, Y-tilting, and Rotational modes, with 90% (black) and 95% (red) iso-accuracy lines. The generated design examples on the right corresponding to frequency combinations indicated by arrows on the left figure with the same matching colors.
The architecture from a previous study based on the cGAN method21 is employed to train customizers for single target tasks for comparison, using the same dataset of 29,430 data points. Four distinct cGANs are trained separately for four different vibrational modes, with their training processes shown in Fig. S5, where both the discriminator and generator stabilize after 3000 training steps. In contrast, this work utilizes a single conditional denoising diffusion probability model (cDDPM) to address all four customization tasks. As shown in Fig. S6, the performance of cGANs is inferior to that of the cDDPM scheme for single-target customization tasks to achieve barely 80% in accuracy for the X-tilting and Y-tilting modes and only 50% in accuracy for the other two modes.
Dual- and triple-target customization
Dual-target customizations are conducted for the six pairwise combinations of the four vibrational modes. The accuracy heatmap and representative resonators are shown in Fig. 3b and Figs. S7–S8, where 95% and 90% iso-accuracy lines are illustrated and the single-target customization results are used to guide the testing range. The combination of the X-tilting and Y-tilting modes leads to a traversal region of [0.32 MHz, 0.90 MHz] \(\times\) [0.32 MHz, 0.90 MHz] with the reduction in accuracy when compared with those of the single-target customization tasks across the entire testing domain. In general, the average accuracy falls below 90% in less than 5% of all results (0.4%, 0.7%, 5.2%, 1.7%, 4.7%, and 4.3% for the six combinations, respectively) and an average accuracy of 95% or higher is achieved in more than 80% of the region (92.4%, 94.5%, 81.9%, 91.4%, 83.2%, and 80.0% for the six combinations, respectively). The three resonator designs on the right side satisfy all material and geometric constraints with different labyrinth-like patterns. As the number of the target frequency increases, the number of qualified resonator designs decreases such that generated resonator designs will progressively be deterministic. The accuracy of the dual-target customization is constrained by two main factors. First, it has more constraints and fewer relevant data points as compared with those of the single-target customization task. Increased size and quality of the dataset can help alleviate the problem. Second, the interdependence between different modes may shrink the physically feasible domain. In general, a two-dimensional region is determined by the physically feasible domains of the two resonant modes. However, some points within this region are not feasible as different modes can be interrelated and are not independent. For example, some points in the combination of the rotational mode and flexural mode require an extremely low rotational frequency and an extremely high flexural frequency, simultaneously. However, results show a positive correlation between the rotational frequency and flexural frequency (see Supplementary Note 1 and Fig. S9) such that extremely high flexural frequency and low rotational frequency or vice versa cannot coexist. For these cases, designs close to target resonant frequencies are provided. On the other hand, regions with low accuracy also imply physically infeasible design domains.
The single-target customization task is like finding a plane in a three-dimensional space and the dual-target customization task is like finding the intersection line between two planes. Adding the third target is like finding the intersection of three planes, or a single point, which is extremely difficult. While cGAN can achieve a certain level of accuracy in single-target customization, it is not effective to produce meaningful outputs in the DM design for dual-target or triple-target tasks. For triple-target customization, the customizer developed in this work exhibits excellent performance to match the specified resonant frequencies of three different vibrational modes. A traversal generation process is conducted within the three-dimensional region defined by the physically feasible domains of each vibrational mode. The accuracy results are presented in multi-sectional views, as shown in Fig. 3c (for the combination of X-tilting, Y-tilting, and Rotational modes) and Figs. S10 and S11 (for the other three combinations). Red and black solid lines represent the 95% and 90% iso-accuracy lines, respectively. These results indicate that 95% accuracy regions cover 73.2%, 62.9%, 63.6%, and 62.5% of the three-dimensional region for the four different combinations, while 90% accuracy regions cover 88.5%, 83.8%, 87.0%, and 84.7% of the three-dimensional region for the four different combinations, respectively. In the triple-target customization task, the interdependence between different modes further reduces the physically feasible domain, which results in more unsolvable regions. Extremely high or low modal frequencies are more likely to produce unsolvable regions as shown in the top and bottom sectional views in Fig. 3c with larger low-accuracy areas. In contrast, the mid-sectional view more closely resembles the results in Fig. 3b because the Rotational frequency constraint at 0.51 MHz is relatively weak. Three design examples are shown in Fig. 3c with identical X-tilting and Y-tilting frequencies and different rotational frequencies by using distinctly different labyrinth-like patterns. Together with the second resonator shown in Fig. 3b, a total of four different designs meeting the X-tilting and Y-tilting frequency requirement of 0.6 MHz have been presented. This demonstrates the versatility for the cDDPM-based customizer in contrast to the mode collapse issues commonly seen when using the cGAN scheme.
Customization for specific applications
The resonator in this study may respond to external forces, such as electrostatic37, piezoelectric38, or optical actuation39, with its vibrational behavior dependent on the applied force frequency, location, and amplitude. These parameters influence which vibrational modes are predominantly excited and their relative amplitudes. In this study, the four primary fundamental vibrational modes—X-tilting, Y-tilting, Rotational, and Flexural mode—can be selectively excited by tuning the applied force characteristics, as demonstrated in Loads #1–#4 in Fig. 4a. In contrast, Load #5 in Fig. 4a represents a linear superposition of Loads #1, #2, and #4 (see Supplementary Note 2), designed to simultaneously excite three vibrational modes with a dominant z-directional displacement (excluding the rotational mode). Under this driving force, the response curve of the resonators varies according to the frequencies of these three vibrational modes. In order to optimize the performance under Load #5, the amplitude-frequency curve measured at Node A is characterized, where the z-directional displacement is a superposition of the movements due to these three modes. If the goal is to enhance the resonator’s output at a specific frequency, one possible arrangement is to align the frequencies of selected vibrational modes. To achieve this, the resonant frequencies for the X-tilting, Y-tilting, Rotational, and Flexural modes are set at 0.55 MHz, 0.55 MHz, 0.6 MHz, and 1.75 MHz, respectively. This configuration ensures that the X-tilting and Y-tilting modes overlap at 0.55 MHz, reinforcing their contribution, while the Flexural mode is positioned far away to minimize interference. For this case, the Rotational frequency is not affecting the outcome, while it is given a specific frequency to simultaneously demonstrate the performance of four-target customization. A frequency domain analysis is conducted with four different loading conditions (Loads #1-#4) to characterize the amplitude-frequency curves at Node A as shown in Fig. 4b. The amplitude of the Rotational mode is represented by the x-directional component, while the other modes are represented by the z-directional component with further details in Methods section. The load profile #1-#4 can each activate a different vibrational mode to result in a unique amplitude-frequency curve to represent the resonant frequency of the corresponding mode. Results show the structure has X-tilting frequency, Y-tilting frequency, Rotational frequency, and Flexural frequency of 0.56 MHz, 0.56 MHz, 0.60 MHz, and 1.77 MHz, respectively, for a high average accuracy of 99.0% to the pre-assigned frequencies. Under the application of Load #5, the response of the resonator with respect to frequency is shown in Fig. 4c. It is observed that the two amplitude peaks appear at 0.56 MHz and 1.77 MHz, respectively. The high peak at 0.56 MHz is due to the superposition of the first two modes with an amplitude approximately 14 times higher than that of the second peak at 1.77 MHz. The large frequency gap of 1.21 MHz between the two peaks further reduces the influences between these two peaks.

a Loads #1, #2, #3, and #4 to excite the X-tilting mode, Y-tilting mode, Rotational mode, and Flexural mode. Load #5 can simultaneously excite the X-tilting, Y-tilting, and Flexural mode. For amplitude versus frequency responses, the amplitude is measured at Node A, which is located along the diagonal of the x- and y-axes, on the inner edge of the outer ring structure. Case #1: Amplitude versus frequency responses under: b Loads #1–#4 for the generated design with resonant frequencies at 0.56 MHz (X-tilting), 0.56 MHz (Y-tilting), 0.60 MHz (Rotational), and 1.77 MHz (Flexural), corresponding to an average accuracy of 99.0%. c Load #5 with enhanced output at 0.56 MHz due to the overlapping of X-tilting and Y-tilting modes, showing the first peak at 0.56 MHz, which is 14 times larger than that of the second peak at 1.77 MHz. The 0.6 MHz Rotational mode is nonresponsive to the vertically applied Load #5. Case #2: Amplitude versus frequency responses under: d Loads #1–#4 for evenly spaced resonant frequencies of 0.60 MHz (X-tilting), 0.84 MHz (Y-tilting), and 1.14 MHz (Flexural), and 0.56 MHz (Rotational mode which is nonresponsive to vertically applied Load #5), with an average accuracy of 98.3%. e Load #5 with the increased FWHM by 60% due to the evenly spaced mode frequency design.
In the second case, the goal is to arrange the X-tilting, Y-tilting, and Flexural frequencies in an evenly spaced manner to increase the effective bandwidth40,41,42 by setting the X-tilting mode, Y-tilting mode, and Flexural mode at 0.6 MHz, 0.85 MHz, and 1.1 MHz, respectively. The Rotational frequency can be left unspecified but is set at 0.55 MHz, which represents the dataset’s average value. The resulting amplitude-frequency curve is shown in Fig. 4d to have amplitude peaks at 0.60 MHz, 0.84 MHz, 0.56 MHz, and 1.14 MHz, respectively, which match the pre-set frequencies well with an average accuracy of 98.3%. Figure 4e shows the simulated amplitude-frequency response at Node A under Load #5 with a critical damping fraction of 0.2 as characterized in a previous study14. The curve exhibits three peaks in ascending order of frequency (with the third peak being almost invisible), corresponding to the X-tilting mode, Y-tilting mode, and Flexural mode, respectively. The red dashed line in the figure corresponds to the half of the maximum peak to evaluate the Full Width at Half Maximum (FWHM) value. It can be observed that the three modes are spaced evenly to effectively increase the FWHM to about 0.731 MHz (between 0.257 MHz to 0.988 MHz), which is 60% higher than the FWHM of the original X-tilting mode (see Supplementary Note 3).
Robustness
In practical applications, the robustness of the customizer is essential for stable performances even when users provide unreasonable or unsolvable requirements. Here, various physically infeasible requirements are used in the robustness tests for single-target and dual-target customization cases. Figure 5a–d demonstrate the single-target customization results for four different vibrational modes. For each vibrational mode, two physically infeasible frequencies of extremely high and low outliers, and one physically feasible frequency are tested. The physically infeasible targets are selected sufficiently far from the dataset range: 0.18 MHz, 1.04 MHz for X-tilting and Y-tilting modes; 0.25 MHz, 0.71 MHz for the Rotational mode; and 0.53 MHz, 2.77 MHz for the Flexural mode. The physically feasible targets are selected near the medium values of the dataset: 0.61 MHz for X-tilting and Y-tilting modes, 0.48 MHz for the Rotational mode, and 1.65 MHz for the Flexural mode. For each task, the probability distribution for frequencies generated from 300 designs is plotted. Results show physically feasible designs (blue vertical dashed lines) are tightly clustered around the target frequency with vast majority of them over 99% in accuracy and an average accuracy of 99.5%, 99.4%, 99.6%, and 99.4% for the four modes, respectively. For physically infeasible designs with red (low frequency) and green (high frequency) dashed lines, spread-out frequency distributions are found without reaching targe frequencies, while all designs are relatively close to target frequencies. This illustrates that the customizer can generate valid designs close to the target without losing functionality within the physically feasible domain to prevent malfunction for best possible solutions. For example, if a user needs to find a micro resonator design with the highest possible X-tilting frequency, they can simply set the target frequency to an extremely large value, and the customizer will generate a micro resonator with the highest achievable X-tilting frequency. Furthermore, the best designs generated from infeasible targets have modal frequencies close to or beyond the boundaries of the dataset. For example, multiple designs have shown higher Flexural frequencies than that of the dataset’s upper limit at 2.57 MHz in Fig. S12.

a–d Probability distributions of generated resonant frequencies for the X-tilting, Y-tilting, Rotational, and Flexural mode, respectively. Three target frequencies are assigned for each mode: a 0.18 MHz, 0.61 MHz, 1.04 MHz for the X-tilting mode, b 0.18 MHz, 0.61 MHz, 1.04 MHz for the Y-tilting mode, c 0.25 MHz, 0.48 MHz, 0.71 MHz for the Rotational mode, and d 0.53 MHz, 1.65 MHz, 2.77 MHz for the Flexural mode. For each target, 300 designs are generated. The average accuracy for the physically feasible targets is 99.5%, 99.4%, 99.6%, and 99.4% for the X-tilting, Y-tilting, Rotational, and Flexural mode, respectively. For the physically infeasible targets, the closest frequencies generated are 0.27 MHz, 1.00 MHz (X-tilting), 0.25 MHz, 0.99 MHz (Y-tilting), 0.26 MHz, 0.67 MHz (Rotational), and 0.71 MHz, 2.65 MHz (Flexural). These designs exhibit performances that are close to or even beyond the boundaries of the dataset, which are 0.25 MHz, 0.99 MHz (X-tilting), 0.24 MHz, 0.98 MHz (Y-tilting), 0.23 MHz, 0.64 MHz (Rotational), and 0.65 MHz, 2.57 MHz (Flexural). e Dual-target test for physically feasible frequencies of 0.61 MHz for both X-tilting and Y-tilting modes, with the 600 generated designs clustering tightly around the target. The average accuracy is 97.7%. f Dual-target test for physically infeasible frequencies of 1.04 MHz for both X-tilting and Y-tilting modes, showing a band-like distribution of solutions parallel to the line y = -x, with the 600 generated designs demonstrating an average accuracy of 77.2%.
The robustness of the customizer also applies to multi-target customizations. In the case of the dual-target customization in the physically feasible domain in Fig. 5e, a micro resonator should satisfy both an X-tilting frequency and Y-tilting frequency of 0.61 MHz. The 600 generated designs form a tight distribution around the target point (red dot) with an accuracy of over 95% (the average accuracy is 97.7%), matching the observations in Fig. 3b. The one-dimensional probability distributions for both modal frequencies are also shown in the figure with similar shapes to those in the single-target customization tasks, symmetrically centered around the target frequency. In the case of the dual-target customization in the physically infeasible domain in Fig. 5f, a micro resonator should satisfy both an X-tilting and Y-tilting frequencies of 1.04 MHz. The 600 generated designs form a band-like distribution in the upper right corner of the figure with the direction parallel to the line y = -x. All generated designs in this band exhibit roughly the same average accuracy close to 77.2%. This result shows that the customizer attempts to provide feasible solutions with good accuracy, which is valuable for near-optimal solutions. In this case, the generated designs show two peaks around (0.72 MHz, 0.88 MHz) and (0.88 MHz, 0.72 MHz) with a valley near (0.8 MHz, 0.8 MHz). This implies that there are fewer designs near (0.8 MHz, 0.8 MHz), where the two modal frequencies are equal.
Discussion
An effective methodology to design DM-based resonators with multiple target properties has been developed and demonstrated. By using the conditional denoising diffusion probabilistic model (cDDPM), the proposed scheme successfully achieves high accuracy in both single- and multi-target customization tasks and significantly outperforms traditional methods such as cGAN. The customizer is capable of handling complex multi-modal frequency structures to achieve over 95% accuracy across four vibrational modes in this demonstration. The robustness of the scheme is proved to provide optimal solutions with physically infeasible or ill-posed inputs. This helps possible designs to maintain functional integrity and maximizes user satisfaction under diverse customization conditions. Results from single-target, dual-target, and multi-target customizations together with the two application-specific case studies illustrate the potential of cDDPM in DM design, paving the way for broader applications.
Methods
Training of cDDPM
The main structure of cDDPM is adopted based on the classifier-free diffusion guidance method30 and DDPM26. A data point is first sampled from the real data distribution \({x}_{0} \sim q({x}_{0})\) and a forward process is defined using a Markov chain to generate latent variables \({\{x}_{1},\ldots ,{x}_{T}\}\). At every timestep, Gaussian noise with variance \({\beta }_{t}\in (\mathrm{0,1})\) is added to the latent variables:
With a sufficiently large \(T\) and an appropriate schedule for \({\beta }_{t}\), the final latent variable \({x}_{T}\) approaches an isotropic Gaussian distribution. An important property of this forward process is that \({x}_{t}\) can be calculated in closed form:
The model learns the reverse process to generate the desired data (design) that meets the target properties, starting from random noises. Target properties are encoded as condition \(c\), and the timestep is denoted as \(t\). The model is defined as:
The combination of \(q\) and \(p\) forms a variational auto-encoder, and the loss function can be defined based on the Variational Lower Bound (VLB):
The reverse conditional probability is tractable when conditioned on \({x}_{0}\):
In the model, the variance \({\varSigma }_{\theta }\left({x}_{t},t\right)\) of the Gaussian distribution is set to a constant value, as defined by the posterior variance schedule \({\widetilde{\beta }}_{t}I\). For the mean \({\mu }_{\theta }\left({{\rm{x}}}_{{\rm{t}}},{\rm{t}}\right)\), the model uses a parameterization that predicts the noise \({\epsilon }_{\theta }\):
The loss function can be simplified by removing unnecessary coefficients:
Training the model with respect to \(\theta\) is conducted using the simplified loss function \({L}_{{simple}}\), based on randomly sampled \({x}_{0}\), \(t\), \(c\) and \(\epsilon\). The U-Net architecture, depicted in Fig. S1, is employed to predict the noise in the reverse process. After training is complete (with the loss curve shown in Fig. S2), the model generates the desired design through a sampling process. Starting from \({x}_{T} \sim N(0,I)\), \({x}_{t}\) is generated as t decreases to 0:
where \(c\) represents the encoded condition corresponding to target properties.
Simulation details
A commercial software package, ABAQUS, is utilized for finite element analysis. In all simulations, the resonator structures are discretized using first-order, eight-node elements with reduced integration (C3D8R). The planar dimensions of each element correspond to the size of one pixel in the binary pattern shown in Fig. S3. The entire structure, including the anchor, outer ring, and labyrinth-like pattern, is made of polysilicon with a density of 2.3 g/cm³, a Young’s modulus of 150 GPa, and a Poisson’s ratio of 0.29.
During the natural frequency analysis (using the *frequency command in ABAQUS), a fixed boundary condition is imposed on the nodes located on the bottom surface of the anchor. A subspace eigensolver (Lanczos) is employed to determine the natural frequencies, mode shapes, and effective mass distributions for each mode, with the solver configured to output the first ten natural modes of the resonator. An automated Python interface is then used to extract the four modes of interest for this study based on the effective mass distribution.
For the four-target customization, the amplitude frequency response FEA (steady-state dynamics, modal) is conducted immediately following the natural frequency analysis, using the modal information as intermediate results. The mesh and boundary conditions are identical to those used in the natural frequency analysis. The five types of loads shown in Fig. 4a are applied as concentrated forces, with the total amplitude of each load set to be the same (the sum of all concentrated forces equals 10 N). The frequency sweep is performed by sampling 100 points within a range that includes the frequencies of the four modes, with a bias of 3 to capture variations near each peak as accurately as possible. For the simulations in Fig. 4b–d, the critical damping factor is set to 4e-4 to highlight the peak positions, while for the simulation in Fig. 4e, the critical damping factor is set to 0.2.
Data availability
All data generated or analysed during this study are included in this published article and its supplementary information files. The underlying code for this study is not publicly available but may be made available to qualified researchers on reasonable request from the corresponding author.
References
Qu, Z. et al. High fatigue resistance in a titanium alloy via near-void-free 3D printing. Nature 626, 999–1004 (2024).
Li, F. et al. 3D printing of inorganic nanomaterials by photochemically bonding colloidal nanocrystals. Science 381, 1468–1474 (2023).
Larson, N. M. et al. Rotational multimaterial printing of filaments with subvoxel control. Nature 613, 682–688 (2023).
Milton, G. W. & Sawicki, A. T. Theory of composites. Cambridge monographs on applied and computational mathematics. Appl. Mech. Rev. 56, B27–B28 (2003).
Schaedler, T. A. et al. Designing metallic microlattices for energy absorber applications. Adv. Eng. Mater. 16, 276–283 (2014).
Valdevit, L., Jacobsen, A. J., Greer, J. R. & Carter, W. B. Protocols for the optimal design of multi‐functional cellular structures: from hypersonics to micro‐architected materials. J. Am. Ceram. Soc. 94, s15–s34 (2011).
Rafsanjani, A., Jin, L., Deng, B. & Bertoldi, K. Propagation of pop ups in kirigami shells. Proc. Natl Acad. Sci. 116, 8200–8205 (2019).
Wang, P., Casadei, F., Shan, S., Weaver, J. C. & Bertoldi, K. Harnessing buckling to design tunable locally resonant acoustic metamaterials. Phys. Rev. Lett. 113, 014301 (2014).
Hiller, J. & Lipson, H. Design and analysis of digital materials for physical 3D voxel printing. Rapid Prototyp. J. 15, 137–149 (2009).
Zhang, Z. & Gu, G. X. Finite‐element‐based deep‐learning model for deformation behavior of digital materials. Adv. Theory Simul. 3, 2000031 (2020).
Gu, G. X., Chen, C. T. & Buehler, M. J. De novo composite design based on machine learning algorithm. Extreme Mech. Lett. 18, 19–28 (2018).
Luo, Y., Li, M., Yuan, H., Liu, H. & Fang, Y. Predicting lattice thermal conductivity via machine learning: a mini review. Npj Comput. Mater. 9, 4 (2023).
Holzmond, O. & Li, X. In situ real time defect detection of 3D printed parts. Addit. Manuf. 17, 135–142 (2017).
Guo, R. et al. Deep learning for non-parameterized MEMS structural design. Microsyst. Nanoeng. 8, 91 (2022).
Brackett, D., Ashcroft, I. & Hague, R. Topology optimization for additive manufacturing. Proc. Solid Free. Fabr. Symp. 348, 362 (2011).
Deng, C., Wang, Y., Qin, C., Fu, Y. & Lu, W. Self-directed online machine learning for topology optimization. Nat. Commun. 13, 388 (2022).
Sui, F., Guo, R., Zhang, Z., Gu, G. X. & Lin, L. Deep reinforcement learning for digital materials design. ACS Mater. Lett. 3, 1433–1439 (2021).
Kim, N., Lee, D. & Hong, Y. Data-efficient deep generative model with discrete latent representation for high-fidelity digital materials. ACS Mater. Lett. 5, 730–737 (2023).
Pahlavani, H. et al. Deep learning for size‐agnostic inverse design of random‐network 3D printed mechanical metamaterials. Adv. Mater. 36, 2303481 (2024).
Mao, Y., He, Q. & Zhao, X. Designing complex architectured materials with generative adversarial networks. Sci. Adv. 6, eaaz4169 (2020).
Sui, F., Guo, R., Yue, W., Behrouzi, K. & Lin, L. Customizing mems designs via conditional generative adversarial networks. Proc. IEEE Int. Conf. Micro Electro Mech. Syst. 35, 450–453 (2022).
Dhariwal, P. & Nichol, A. Diffusion models beat GANs on image synthesis. Adv. Neural Inf. Process. Syst. 34, 8780–8794 (2021).
Alverson, M. et al. Generative adversarial networks and diffusion models in material discovery. Digit. Discov. 3, 62–80 (2024).
Rombach, R., Blattmann, A., Lorenz, D., Esser, P., & Ommer, B. High-resolution image synthesis with latent diffusion models. roc. IEEE/CVF Conf. Comput. Vis. Pattern Recognit. 10684-10695 (2022).
Ramesh, A., Dhariwal, P., Nichol, A., Chu, C., & Chen, M. Hierarchical text-conditional image generation with CLIP latents. arXiv arXiv:2204.06125 (2022).
Ho, J., Jain, A. & Abbeel, P. Denoising diffusion probabilistic models. Adv. Neural Inf. Process. Syst. 33, 6840–6851 (2020).
Rao, C. et al. Encoding physics to learn reaction-diffusion processes. Nat. Mach. Intell. 5, 765–779 (2023).
Mazé, F. & Ahmed, F. Diffusion models beat gans on topology optimization. Proc. AAAI Conf. Artif. Intell. 37, 9108–9116 (2023).
Zhang, J. et al. Conditional diffusion models for the inverse design of lattice structures. Struct. Multidiscip. Optim. 68, 1–23 (2025).
Ho, J., & Salimans, T. Classifier-free diffusion guidance. arXiv arXiv:2207.12598 (2022).
Nguyen, C. C. & Howe, R. T. An integrated CMOS micromechanical resonator high-Q oscillator. IEEE J. Solid-State Circuits 34, 440–455 (1999).
Clark, J. R., Hsu, W. T., Abdelmoneum, M. A. & Nguyen, C. C. High-Q UHF micromechanical radial-contour mode disk resonators. J. Microelectromech. Syst. 14, 1298–1310 (2005).
Gu, L., Zhang, W., Lu, H., Wu, Y., & Fan, C. Flower-like disk resonator for gyroscopic application. Rev. Sci. Instrum. 93, 115006 (2022).
Hodjat-Shamami, M. & Ayazi, F. Eigenmode operation of piezoelectric resonant gyroscopes. Microsyst. Nanoeng. 6, 108 (2020).
Stassi, S. et al. Reaching silicon-based NEMS performances with 3D printed nanomechanical resonators. Nat. Commun. 12, 6080 (2021).
Wen, X. et al. 3D-printed silica with nanoscale resolution. Nat. Mater. 20, 1506–1511 (2021).
Um, Y. & Nguyen, C. Wideband dual-bandpass 0.18-µm CMOS SPDT switch utilizing dual-band resonator concept. Microw. Opt. Technol. Lett. 60, 1215–1219 (2018).
Anderson, J., He, Y., Bahr, B. & Weinstein, D. Integrated acoustic resonators in commercial fin field-effect transistor technology. Nat. Electron. 5, 611–619 (2022).
Chen, I. T. et al. Optomechanical ring resonator for efficient microwave-optical frequency conversion. Nat. Commun. 14, 7594 (2023).
Wang, K., Wang, G., Dai, X., Ding, G. & Zhao, X. Implementation of dual-nonlinearity mechanism for bandwidth extension of MEMS multi-modal energy harvester. J. Microelectromech. Syst. 30, 2–14 (2020).
Feng, H. et al. Multimodal MEMS vibration energy harvester with cascaded flexible and silicon beams for ultralow frequency response. Microsyst. Nanoeng. 9, 33 (2023).
Zhang, F., Zhao, Y. & Ruan, C. A high-power and broadband G-band extended interaction klystron based on mode overlap. IEEE Trans. Electron Devices 69, 4611–4616 (2022).
Acknowledgements
The authors acknowledge funding from the Berkeley Sensor & Actuator Center.
Author information
Authors and Affiliations
Contributions
W.Y. proposed mechanism, designed the research, carried out simulations and data analysis. W.Y., Y.G. and F.S. prepared the dataset. W.Y., Z.P. and Y.G. carried out machine learning modeling and data visualization. W.Y., Y.G., Z.P., F.S. and L.L. participated in the manuscript drafting. L.L. and F.S. coordinated and directed this research. All authors read and approved the final manuscript.
Corresponding authors
Ethics declarations
Competing interests
The authors declare no competing interests.
Additional information
Publisher’s note Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Supplementary information
Rights and permissions
Open Access This article is licensed under a Creative Commons Attribution 4.0 International License, which permits use, sharing, adaptation, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons licence, and indicate if changes were made. The images or other third party material in this article are included in the article’s Creative Commons licence, unless indicated otherwise in a credit line to the material. If material is not included in the article’s Creative Commons licence and your intended use is not permitted by statutory regulation or exceeds the permitted use, you will need to obtain permission directly from the copyright holder. To view a copy of this licence, visit http://creativecommons.org/licenses/by/4.0/.
About this article

Cite this article
Yue, W., Gao, Y., Pan, Z. et al. Multi-target digital material design via a conditional denoising diffusion probability model. npj Comput Mater 11, 260 (2025). https://doi.org/10.1038/s41524-025-01759-3
Received:
Accepted:
Published:
Version of record:
DOI: https://doi.org/10.1038/s41524-025-01759-3
