
Abstract
Spatially explicit fire and harvest data are useful for driving land surface model (LSM) simulations of the carbon cycle. From 1985-present, numerous Canadian disturbance datasets exist. However, before the launch of Landsat-4 (1984), few are available. We create spatially explicit LSM disturbance drivers for Canada for 1740–2018. We catalog and harmonize spatial and aspatial datasets and develop a novel algorithm that reconstructs disturbance far back in time using stand age. Based on possible historical scenarios, we reconstruct 283–394 Mha of fire and 3.42 Mha of harvest in total Canada-wide from 1740–1918. After 1918, when spatial records are available, we supplement them by reconstructing 25.79–60.30 Mha of fire and 24.75 Mha of harvest. After 1984, we exclusively use spatially explicit records. We verify the algorithm by comparing the inputs and resultant drivers and examine diagnostic metrics to disentangle the contribution of spatial, aspatial, and stand-age data. The resulting drivers primarily capture stand-replacing disturbance on forested land. Our forcings and algorithm will improve the representation of disturbance-mediated impacts on Canada’s terrestrial carbon cycle and possibly in other regions.
Similar content being viewed by others

Background & Summary
Canada’s boreal forests play an important role in the global carbon cycle1,2, serve as a major source of harvestable timber3, and are impacted by forest fires that destroy property and harm human health4,5,6. Ongoing climate change and anthropogenic activity are affecting Canada’s boreal forests2,4,7. Process-based land surface models (LSMs) are an important tool for exploring the impacts of disturbance and climate change and synthesizing our understanding of Canada’s terrestrial carbon cycle8,9,10,11,12,13. Some LSM frameworks require spatially explicit information about disturbed area read in from a file, known as a disturbance forcing, that extends far back in the historical period8,14.
Rapid increases in temperature and changes in precipitation patterns are resulting in regional increases in boreal wildfire, increases in the size and frequency of large fire events (>200 ha), and increases in the length of the fire season4,15,16,17. The 2023 wildfire season, which was caused by extreme conditions driven by climate change5,18, stands out with a record 12.74 Mha of land area burned, of which 9.3 Mha was occupied by trees19, and releasing record emissions18,20. These trends of increasing disturbance as a result of climate change will likely continue into the future4,15,16,21. Wildfire not only impacts the carbon cycle but also impacts land ecosystems, merchantable timber, and human populations, leading to costly suppression efforts, property damage, evacuations, and both acute and long-term detrimental human health impacts3,5,6,22,23,24,25,26. Historically, local timber was used for urban and rural development purposes where available. Due to advances in transportation networks and equipment, harvesting now occurs in more remote locations, with harvest levels governed by conservation objectives and sustainable forest management27. From a broader non-carbon cycling perspective, forest fire and disturbance are of interest as fundamental components of many ecosystems that shape successional dynamics and influence biodiversity28,29,30,31,32.
LSMs require a spin-up to pre-industrial conditions to equilibrate their carbon and energy fluxes before starting a transient simulation8,10,14,33. An LSM historical run then begins from the pre-industrial state forward in time to simulate the impact of climate change, rising atmospheric CO2, and disturbance through the use of external forcing files. If disturbance is simulated prognostically, no disturbance forcings are needed34,35,36. However, developing mechanistic or statistical models to simulate complex, anthropogenically influenced, and often stochastic disturbance processes like forest fire and especially harvest is challenging3,34,35,36,37,38,39,40,41. Therefore, the use of an externally prescribed forcing can be beneficial to reduce model uncertainty and increase accuracy when investigating scientific questions regarding the disturbance’s role in the historical terrestrial carbon cycle using LSMs41,42,43. These disturbance forcings should include the entire historical period (usually corresponding to between 1750 and the present day) but may only have reliable and cohesive estimates more recently when spatially explicit disturbance information is available8,14,41, described hereafter as the satellite era (1985 to present). However, we argue that it is beneficial to have forcing files that extend throughout this full range of time using the best sources of information available. In addition, forcing files can be made to represent competing assumptions about disturbance before 1918, when no reliable records are available. The resulting forcings can then allow for tests of the sensitivity of an LSM to historical disturbance.
Developing historical disturbance forcings extending back to the 1700 s is non-trivial. During the satellite era, spatially explicit land cover change information for the globe derived from digital satellite imagery is increasingly available7,42,44,45. However, before the satellite era, few historical spatially explicit data are available in many regions of the world42. Canada does have several sources of information regarding wood harvest and forest fire available for the pre-satellite period, including spatial (i.e., raster or polygon), aspatial (i.e., tabular) data, and upscaled stand age data (Tables 1, 2). Fortuitously, in some regions of Canada, the spatially explicit data extends as far back as the early 1900s, as do the aspatial historical data related to Canada-wide fire and harvest. While datasets can represent historic periods, the further they go back in time, the less accurate the information content will be, as reviewed in Maltman et al.46. These disparate sources of information vary in their spatial and temporal coverage and require careful processing to integrate and ensure reasonable accuracy for a harmonized product4,7,47.
The objective of this study is to develop spatially explicit historical disturbance forcings suitable for forcing fire and harvest in LSMs over Canada. We sought to collect and document an array of these disparate forest fire and wood harvest data at the provincial and national levels in Canada and combine them into a single harmonized raw vector product. We then develop a forest disturbance back-assignment algorithm (FDBA) that uses stand age data along with the disparate spatial and aspatial disturbance datasets to create harmonized high-resolution historical disturbance forcings. The raw harmonized data and associated documentation may contribute to a wide range of research efforts focused on forest fire and harvest within Canada. The forcings will facilitate improvements to the representation of disturbances’ impact on the terrestrial carbon cycle and may apply to other regions. Overall, this work improves the replicability and transparency of disturbance drivers for LSMs focused on Canada and potentially other regions around the world.
Methods
Study area and terminology
We use all of Canada south of 76° N as the extent of our study area. Canada contains around 650 Mha of forested land. Around 52% of Canada’s forested land, largely in southern latitudes, is considered managed forest48. In Canada, forest disturbance is dominated by insect disturbances, forest fire, and timber or wood harvest43,49,50. Around 98 Mha (18%) of forested land (i.e., including both managed and unmanaged) was disturbed by fire and harvest between 1985 and 201551. Around 60% of that 98 Mha was disturbed by fire and 40% by harvest. Insects are the largest disturbance agent in Canada and impact ~16.6 Mha per year51. However, insects have complex species-specific impacts ranging from defoliation to mortality49,51. These impacts are not represented in most modern LSMs and are challenging to capture with remote sensing and separate from other disturbance agents8,42,51,52. A stand-replacing disturbance like fire and harvest, on the other hand, results in the total or near-total removal of the dominant vegetation cover53. Therefore, within our domain, we focus on fire and harvest. Forest fire, referred to hereafter as fire, encompasses uncontrolled burns of combustible vegetation. All fire data in this work is assumed to be stand-replacing and to occur primarily in areas with forested land. Commercial timber or wood harvest, herein referred to as harvest, encompasses clear-cutting and thinning of trees carried out for commercial purposes54. Disturbance refers to fire and harvest collectively.
Spatially explicit time series data (spatial data, see “Spatial data” and “Supplementary data”) encompasses vector polygon features and raster layers detailing disturbance and related supplementary information. Vector polygon features, herein referred to as vector data, represent areas on the landscape impacted by disturbance as groups of connected points in two-dimensional geographic space. A single record within a vector dataset is referred to as a polygon. A polygon can have any number of tabular records (attributes) associated with it (e.g., data stamp, fire ignition source, classifications of silviculture activity). A multipart vector polygon feature (singular multipart polygon or plural multipart vector data) contains multiple polygon features that share a single attribute record (e.g., burned areas some distance apart that were ignited by embers after a single ignition event). Finally, a raster is data stored in a two-dimensional grid composed of individual cells. Cells may contain binary (i.e., disturbed versus undisturbed), integer (e.g., the year disturbance occurred), integer code (e.g., codes between 0 and 2 denoting different fire or harvest event types), or continuous (e.g., stand age) data.
Aspatial time series data (aspatial data; see “Aspatial data”) encompasses tabular data detailing areas disturbed across some defined region of space (e.g., Canada-wide annual burned area). Disturbance data that stem from spatial data are herein classified as known. Disturbance data that stem from aspatial data are classified as unknown, reflecting that their distribution across space and the detection effort associated with them is not known. For example, tabular data from the early 20th century may not capture fires in inaccessible and uninhabited regions of Canada. When aspatial data is used alongside supplementary information to create a unified spatiotemporal disturbance, the resulting disturbed area is referred to as placed.
Overview
We develop an algorithm for placing forest disturbance based on aspatial data, incomplete spatial data, and supplementary information including stand age. First, we catalog available spatial, aspatial, and supplemental data (see “Spatial data” and “Aspatial data”). Second, we harmonize and process the data to ensure consistency and suitability in an LSM context and develop prototypical scenarios for the years before 1918 (see “Harmonization of vector data” and “Extension of disturbance before 1918 and resultant scenarios”). Finally, we input this information into the FDBA algorithm to create 0.22-degree raster products (see “Algorithm overview” and “Sample runs”). We run the FDBA algorithm using four different permutations of the input data (see “Sample runs”).
The philosophy of our approach is to treat the available datasets as authoritative for the periods they cover. When multiple, conflicting datasets existed for a particular period or assumptions about disturbance had to be made far in the past, we include alternative forcings. These forcings are intended to facilitate model-on-model comparisons to test the sensitivity of a given LSM to historical disturbance. The result is four disturbance forcings suitable for LSMs.
Spatial data
Multiple government-curated datasets detail disturbances across Canada. The datasets, however, vary in their temporal coverage (Figs. 1, 2, Tables 1, 2). Vector forest fire data is available from five provinces, the Yukon, and the Northwest Territories. The Canadian National Fire Database (CNFD)55 aggregates the majority of this publicly available provincial data into a single database. The CNFD also includes information from additional provinces that do not make their data publicly available. The CNFD utilizes a range of mapping techniques, which likely lead to subtle differences in how the edges of individual fires are delineated and the quality of masking around water features. The data quality and completeness vary between years and across space. That is, data from other agencies may not be included in its entirety, or fires in the early 20th century in inaccessible and uninhabited regions of Canada may never have been recorded55.

Map displaying the earliest fire record available in the provincial or national aspatial vector datasets (e.g., not including the NTEMS raster fire data; Table 1). The data are converted from vectors into a 5 km raster. To improve the interpretability of the visualization, cells with no data are infilled using an 8 × 8 moving window minimum, and a low-pass filter is applied to smooth the visualization.

Map displaying the earliest harvest record available in the provincial aspatial vector datasets (e.g., not including the NTEMS raster harvest data; Table 1). Data are converted from vectors into a 5 km raster. To improve the interpretability of the visualization, cells with no data are infilled using an 8 × 8 moving window minimum, and a low-pass filter is applied to smooth the visualization.
Raster fire data are available from the Canadian Forest Service (CFS) via the National Forest Information System (NFIS). This dataset was derived from 30-m spatial resolution Landsat imagery from 1985 onwards using breakpoint detection paired with machine learning classification56. This dataset encompasses fires in both forested and non-forested land. One of the main advantages of such satellite-derived products is that the detection effort and mapping methods are uniform across this period56.
We use all available and accessible vector harvest datasets, as overviewed in Table 2. Only British Columbia (https://catalogue.data.gov.bc.ca/dataset/harvested-areas-of-bc-consolidated-cutblocks-), Quebec (https://www.donneesquebec.ca/recherche/dataset/feux-de-foret), and Alberta (https://geodiscover.alberta.ca/geoportal/rest/metadata/item/100b275712b442acbda4a0358d8a4951/html) have publicly available data, and there is no national database. Vector harvest data is available from Saskatchewan under license and from the Northwest Territories. Harvest data before 1960 is not available except for British Columbia and Quebec (Fig. 2). These datasets included a wide range of attribute information except for the provincial dataset for Manitoba (https://mli.gov.mb.ca/forestry/index.html), which included no attribute information. The vector harvest data includes attributes classifying the harvest and silviculture activity.
A Canada-wide raster harvest inventory at 30-m spatial resolution is available from 1985 onwards from the CFS (as open data in NFIS). The detection effort, mapping quality, and completeness of this satellite-era harvest dataset are similar to what is available for fire56,57.
Aspatial data
Aspatial data were used to quantify the trends in harvest and fire Canada-wide over time and to fill in the incomplete spatial data when fed into the FDBA algorithm (see “Algorithm overview”). We collected aspatial fire data from Van Wagner44, aiming to capture trends representing the period from 1918–1986. The Van Wagner44 forest fire data references back to Canadian Forestry Service forest fire data opportunistically available from the early 20th century (e.g., paper records). The precise distribution of historic forest fire disturbance in space and the associated detection effort is not known4. That is, fires in remote locations will typically not have been documented. Especially in early years44. Stocks et al.4 reports that large regions of Canada were not monitored before the early 1970s when satellite data became available. Further, several jurisdictions did not monitor remote regions for forest fire in any fashion before the 1950s.
We also collected fire data from Skakun et al.58 for 1950–2018. Skakun et al.58 is a spatially explicit dataset corrected using area burned prediction models. However, we collected aspatial summary information alone to bridge the trends in the Van Wagner44 aspatial time series into the satellite era.
Finally, we collected aspatial harvest data based on the average of clear-cut and total harvest from Global Forest Watch Canada45. This data references back to Environment Canada and Canadian Council of Forest Ministers records. As with the Van Wagner44 the precise distribution of disturbance and associated detection effort is unknown.
Supplementary data
Supplementary datasets, including stand age and harvestable tenures, were used to inform the placement of aspatial disturbance data on the Canadian landscape. We utilized the upscaled forest-age product from Maltman et al.46 to inform fire and harvest placement. This 30-m spatial resolution forest-age product was derived from Landsat and MODIS data using disturbance detection for stands between 0 and 34 years of age, spectral signals of forest recovery for stands between 34 and 54 years of age, and an allometric approach for stands between 54 and 150 years of age. The stand age reference year (i.e., the year the stand ages in the product were measured) for this product is 2019. For harvest, we also used the 2017 map of harvestable forest areas (i.e., private, long-term, and short-term forestry tenures) from Stinson et al.59 as a mask to inform disturbance placement.
Harmonization of vector data
We created harmonized fire and harvest datasets from the available spatial data. Harmonization was carried out on the vector datasets to address differing spatial and temporal extents. The harmonization process combined these many datasets into a single vector product that was then fed into the FDBA algorithm (see “Algorithm overview”) alongside the raster data sources. Harmonization began by identifying a set of attributes (Supplementary Table 1) to be maintained across all national (CNFD) and provincial files. Because the provincial dataset from Manitoba did not include any attribute information, the attributes were transferred over from the CNFD dataset. The attributes were transferred between polygons that were assumed to be the same disturbance event (i.e., had the same date stamp and >80% of their area overlapped). 14,614 out of 27,642 total polygons had attribute information assigned to them in this manner. The remainder did not have attribute information assigned.
The provincial and national datasets contained ~55,400 polygons that overlapped in space and time. If the provincial and national datasets contained identical polygons (i.e., the same date attribute and 100% of their area overlapped; ~33,200 polygons), the provincial polygon was prioritized due to the coarser delineation around water features of CNFD polygons. If the polygons were not identical (~22200 polygons), they were flagged and harmonized based on their degree of overlap. For polygons where <2% of the area overlapped, the polygons were assumed to represent two fire events, and both polygons were retained. For polygons where >80% of the area overlapped, the polygons were assumed to be a result of minor differences in the mapping of the same fire event. Therefore, the provincial polygon alone was retained. Polygons that overlapped by 2% to 80% were resolved conservatively by averaging the centroids of the two original polygons to find a new center. Then, the smaller polygon was shifted to the new center and scaled proportionally so its area equaled the average of the two original polygons.
Areas where fire occurred multiple times in the same dataset, location, and year were flagged and harmonized using different criteria. LSMs often assume that disturbance is stand-replacing8,14, and repeated stand-replacing fire disturbances in the same year are not ecologically reasonable in this context51. We resolved these situations based on the degree of overlap between the polygons. Polygons with <10% overlap were both retained. This procedure uses a higher threshold compared to the earlier harmonization step where overlapping polygons in multiple different datasets were resolved (i.e., overlapping polygons in national and provincial data). That earlier step resolves slight differences in digitization and mapping between different datasets, whereas this step focuses on resolving overlaps within the same dataset that are not ecologically reasonable from the perspective of an LSM. Polygons with 10–80% overlap were assumed to represent the same fire event and were joined together into a single larger polygon. For polygons that overlapped by over 80%, the polygons were treated as duplicate data, and the smaller fire was temporarily retained. These were cases where multiple smaller polygons overlapped a single large polygon, so we sought to preserve these more detailed smaller polygons, which likely represented a higher accuracy mapping of the same fire event. Therefore, if the smaller polygons covered >90% of the larger polygons’ area, the smaller polygons were retained. However, if the smaller polygons covered <90%, they were joined to the larger polygon. We then created a “Fire ID” polygon attribute, which identified polygons from the same fire event (Supplementary Table 1). After harmonization, multipart polygons and nearby polygons, which could be reasonably assumed to be part of the same fire event (within 5 km), were assigned the same Fire ID. If the final polygon was derived from multiple data sources, then a new field, “MultiPoly”, was added to each “Fire ID”, indicating the number of different polygons with the same “Fire ID” (Supplementary Table 1). Our analysis of the raw vector fire data strongly suggests it primarily captures stand-replacing fire events in areas with forested land cover. The vector harvest data was processed to ensure it was suitable in the context of an LSM. The vector harvest data was relatively sparse with no overlapping polygons, and as a result, no harmonization steps were applied to the vector harvest data. However, LSMs that simulate vegetation using an average individual and represent timber harvest are often only conceptually capable of representing clear-cut harvest8,42. Given the sparse nature of the vector harvest data (Fig. 2), we chose to pre-process the thinning polygons into a form suitable for such an LSM. We decided this approach was preferable to removing the records and potentially biasing the disturbance forcing toward underrepresenting harvest’s carbon cycling impacts on forests. We scaled polygons flagged as trimming or non-clear-cut harvest to an equivalent clear-cut area. Silvicultural thinning selects trees to be removed based on a variety of criteria (e.g., height, yield class) or based on a fixed pattern (e.g., every other row)60. Heavy thinning treatments can remove >30% of basal area, with some studies indicating removals as high as 64%61. Light and moderate thinning generally removes <30%62. We assume, based upon this literature, that non-clear-cut harvest removes a third of the trees in a stand, making it equivalent to a clear-cut area a third the size of the original polygon. Polygons indicating salvage cuts were not included in the harmonized dataset (<1% of all disturbed land). This was done because the majority of these data lacked information about the original disturbance agent. Post-fire salvage represents harvests of already disturbed land. Therefore, the majority of LSM modeling frameworks with stand-replacing disturbance will not be able to explicitly represent this process as any fluxes from this disturbance would already be implicitly included in the stand-replacing event8,14,42. Incorporating salvage following insect disturbance would require cataloging and harmonizing historical insect disturbance data. Finally, we excluded any polygons documenting other types of silviculture activity (i.e., site prep or planting). Our analysis of the raw vector datasets strongly suggests that they are limited to commercial harvest alone.
Preprocessing, bias correction, and partitioning of aspatial data
The Van Wagner44 aspatial data was extended into the satellite era using aspatial summary information from Skakun et al.58 In the period of overlap between 1950 and 1986, we averaged the two datasets using a simple mean.
Moreover, there is a clear difference in the total area disturbed as reported by aspatial data compared to the spatial vector and raster datasets. To address this, we applied a multiplicative bias correction63 based on the overlap in the aspatial and spatial data (Fig. 3). This procedure preserved the inter-annual variation and trends in the aspatial data while adjusting the mean based on the Canada-wide mean area disturbed from the spatial data. This procedure was done separately for vector fire, raster fire, and raster harvest. For vector fire, we determined that only the years after 1970 are complete enough for bias correction. For the harvest, we found that only the raster data is complete enough to provide a reasonable Canada-wide total.

Total annual Canada-wide disturbed area before bias correction and the bias-correction coefficients for (a) raster fire, (b) vector fire, and (c) raster harvest. Bias correction coefficients are calculated for the overlapping years except vector fire, where only data from 1970 or later are used to develop the coefficient. Note that in panels a and b, the aspatial data is the same; however, pairing it with different spatial datasets results in different bias-correction coefficients.
Finally, we partitioned the Canada-wide aspatial data into provincial totals based on the fraction of total harvest and burned area each province accounts for in the raster (NFIS) data during the period 1985–2020 (Table 3). Therefore, our resulting products assume no change in the distribution of disturbance over time (i.e., due to changes in the distribution of the population). Bias correction and partitioning by province ensured that these aspatial datasets were suitable for use as inputs to the FDBA algorithm to quantify the trends in harvest and fire Canada-wide over time.
Extension of disturbance before 1918 and resultant scenarios
Before 1918, no spatial or aspatial Canada-wide disturbance data are publicly available. However, to facilitate model-on-model comparisons of LSMs’ response to disturbance before 1918, the FDBA algorithm required inputs that quantified trends in harvest and fire Canada-wide in that period.
Therefore, for harvest, we assumed a linear decrease based upon the slope of the 1918–1990 aspatial trend. As a result, harvest reached zero in 1882 (Fig. 4e). This roughly coincides with the rise of industrialized harvest in Canada but omits earlier harvest by settlers and Indigenous communities27. We assess that this assumption is reasonable, given the information available and the challenge of partitioning disturbance between harvest and fire far into the past. Any harvest on the landscape would be implicitly represented in the fire disturbance as has been done in other modeling frameworks41,43.

The four aspatial scenarios for (a) raster_Inferred fire, (b) raster_mean fire, (c) vector_Inferred fire, (d) vector_mean fire, and (e) raster harvest. The “raster” scenarios use NFIS data during the satellite era (1985 - present), whereas the “vector” scenarios use the harmonized vector data. Bias-corrected aspatial data is used between 1918 and 1985 and differs depending upon whether raster or vector data was used during the satellite era. Before 1918, the “Inferred” scenarios are derived from 1920s stand age, whereas the “mean” repeats the 1920–1930 mean from 1918 to 1740. Again, the mean differs depending on whether raster or vector data is used during the satellite era. Raster harvest uses NFIS data during the satellite era, bias-corrected aspatial harvest between 1918 and 1985, and a linear decrease based upon the slope of the 1918–1990 aspatial trend after 1918.
For fire, we incorporated two different historical scenarios. The “Mean” scenarios repeat 1920 to 1930 mean Canada-wide area burned from 1918 back to l740 (Fig. 4b,d). The mean differs depending upon whether the raster of vector data is used to bias correct aspatial disturbance (see “Preprocessing, bias correction, and partitioning of aspatial data”, Figs. 3a,b, 4b,d). The second “Inferred” scenario comes from Chen et al.43 and Kurz et al.64,65 who inferred it based on 1920s stand age (Fig. 4a,c).
The final result of this analysis is four scenarios for fire and one for harvest. These scenarios yield forcings that extend far back in time, using the best sources of information available and imbuing multiple competing assumptions. They provide high (i.e., Inferred), average (i.e., Mean), and low (i.e., no disturbance before 1918) disturbance scenarios. These scenarios are intended to facilitate model-on-model comparisons to test the sensitivity of a given LSM to disturbance before 1918.
FDBA algorithm overview
We developed the FDBA algorithm to integrate the data (see the data methods sections from “Spatial data” to “Extension of disturbance before 1918 and resultant scenarios”) into a seamless Canada-wide time series. The FDBA algorithm works backward through time from the present day to place disturbance. First, known disturbance events from the spatially explicit data are ingested by the algorithm (see “Spatial data”). Then, the known total disturbed area is compared to the unknown aspatial data (see “Aspatial data”), and the missing disturbed area is placed across the region. Placement is constrained by stand age, user-determined parameters, and the harvestable forest areas mask (see “Supplementary datasets”). As the algorithm runs, it calculates the earliest year a cell can be disturbed and still reach a suitable age for the most recent disturbance. These calculations are updated after each time step, stored as a raster, and used to constrain the next time step.
No aspatial disturbance is placed when the spatial data is assumed to be complete (from 1985 to the present). During this period, the FDBA algorithm inserts harvest from the raster data and fires from the vector or raster data, depending on the scenario being run. Before the satellite era, no raster data are available. Therefore, the FDBA infills known vector disturbance data with unknown aspatial disturbance based upon a series of constraints working backward in time from the most recent year (Fig. 5). The FDBA determines where to place aspatial disturbance using stand age after taking into account any known disturbance events. The algorithm buffers a 2 km zone around a known fire event in which a fire cannot be placed based on the unknown aspatial data. The algorithm includes this step based on the assumption that fires near a known fire event in a given year would have been detected and thus included in the dataset.

Flow chart overview of the forest disturbance back assignment (FDBA) algorithm for a single year. The configuration file is read in, and the rasters are initialized only in the first year of a given run. Placement mode refers to either the naïve or contiguous placement modes (see Figs. 6 and 7 and “Naïve placement” and “Contiguous placement” for an overview of each). This flow chart depicts the FDBA algorithm alone (see “FDBA algorithm overview”) and does not include data pre-processing or harmonization steps.
The algorithm includes two placement modes, naïve and contiguous (see “Naïve placement” and “Contiguous placement”). The placement mode is selected by the user before running the algorithm. The selected algorithm is then used for the harvest and fire placement steps (Fig. 5). The first implements naïve placement of the aspatial disturbance (Fig. 6), while the second grows contiguous disturbance polygons to place aspatial disturbance (Fig. 7). In both modes, the earliest year a cell can be disturbed (Yd) is initialized to the stand age raster reference year minus the stand age of that cell. For example, in our stand age raster, the reference year is 2019 (constant for all cells), so a 20-year-old cell will have a Yd of 1999. Once a disturbance is placed, Yd is updated using Eq. 1.

Flowchart of the naïve disturbance placement mode (see “Naïve placement”).

Flowchart overview of the contiguous disturbance placement mode (see “Contiguous placement”).
Yd is the earliest year the cell can be disturbed, year is the present year the algorithm is running over, and burnable age (60 years) and harvestable age (80 years) are spatially uniform user-determined parameters. This process and the initial stand age product it requires implicitly limits aspatial disturbance placement to forested lands, following our understanding of the limitations of the aspatial disturbance data used herein.
We selected burnable and harvestable age values that are ecologically reasonable and consistent with the CLASSIC and other LSMs. We selected a uniform burnable age based on our survey of the literature and tests with the Canadian Land Surface Scheme Including Biogeochemical Cycles (CLASSIC)66,67. Starting from bare ground, it takes 60 years for 25% of the grid cells with over 45% tree cover in the Canada-specific version of CLASSIC to reach a probability of fire conditional on biomass of 50%8,9. Harvestable age varies greatly between species and is a function of climate. Harvestable age is generally based on the plateauing of the growth/yield curves or minimum harvestability criteria such as age or stand volume68,69,70. For example, two of Manitoba’s forest management agencies set a harvestable age of 100 years69, while in BC, the minimum harvestable age can be as early as 40 years68. Therefore, we used a uniform harvestable age of 80 years.
Naïve placement
Naïve placement is one of the two placement modes selectable by the user and distributes aspatial disturbance uniformly across the domain without accounting for event size (Fig. 6). It assumes that all cells deemed disturbable based on the criteria defined below have an equal probability of being disturbed and, therefore, disturbance should be allocated uniformly in space.
Placement begins by setting the stand age window size (Sw, years). The stand age window size sets the allowable deviation from Yd for each cell. This value is initialized to zero each year and then determined adaptively. That is, the algorithm increments the stand age window size by one until enough cells are flagged as disturbable to place the amount of disturbance in the aspatial data. The algorithm terminates if the stand age window size exceeds a user-determined maximum (100 years) to ensure the stand age window size can’t grow unreasonably.
We define disturbable cells (dflag) as those that do not contain a known disturbance in that year and are flagged based on Eq. 2 as burnable or harvestable,
where the harvest mask (Mharv) is a Boo”ean mask indicating if the cell is within a harvestable area based on Stinson et al.59 (see “Supplementary datasets”), and Sw is the stand age window size for that iteration of the algorithm. Using Mharv based on Stinson et al.59 likely further ensures our analysis is limited to commercial harvest alone.
To allow the algorithm to efficiently and uniformly place disturbance across the provinces, cells within a series of square windows are grouped into sectors. This is carried out based on a user-determined coarsening factor. The coarsening factor is used to form the square sectors with sides of length coarsening factor (750 cells). Each sector is then allocated a fraction of the total aspatial disturbance proportional to its total area within the region of interest.
The algorithm iterates through a queue of the sectors (northwest to southeast by row), and disturbance is placed in individual cells. If the predetermined allocation for the sector has been reached or if no disturbable cells remain in the sector, then the algorithm will move to the next sector. After the first pass, the algorithm may retain a small number of excess disturbance cells that have not yet been assigned. This happens because some sectors may not contain enough disturbable cells to satisfy their initial allocation. These excess cells are placed by randomly selecting sectors with replacement.
Contiguous placement
Contiguous placement is the second alternative placement mode, selectable by the user. It grows individual polygons to represent disturbance (Fig. 7). This assumes that all cells deemed disturbable (see “Supplementary datasets”) have an equal probability of being disturbed. However, rather than allocating the disturbance uniformly across space, it is allocated randomly in the form of cohesive polygons with a plausible size distribution. This process is computationally intensive and stochastic, meaning its outputs represent just one possible realization of historical disturbance on the landscape.
The algorithm first randomly samples an event size from the spatially explicit disturbance observations. The stand age window size is then set adaptively as in the naïve placement algorithm (see “Naïve placement”). If the window size exceeds the user-determined maximum (100 years), then a new event size is sampled, and the process restarts with a stand age window size of zero. This threshold prevents disturbance events from being placed that are too large and highly improbable, given the age of the landscape. Disturbable areas are defined as in the naïve placement algorithm (See Eqs. 2,3, and “Naïve placement”). The raster is then broken into sectors. Unlike in naïve placement, the coarsening factor (cells) is determined by the size of the disturbance event (Ep; area in number of cells). Initially, it is calculated as the nearest power of ten capable of containing a disturbance event of that size (Eq. 3).
This forms a square area (a sector) with sides of length coarseness factor, which is compared to the disturbance event area. To ensure the disturbance can be placed, the exponent is increased by one if the event represents over 60% of the resulting sectors.
The algorithm checks if any of the sectors contain a sufficient number of disturbable cells, given the size of the disturbance event (Fig. 7). If there are no suitable sectors, the algorithm increments the stand age window size and repeats the process. Otherwise, one suitable sector is randomly selected. The algorithm searches the sectors for an interconnected region of disturbance cells large enough to contain the event. If no such region exists, a new sector is randomly selected. This process repeats up to ten times, after which the stand age window size is incremented, and another attempt is made to place the disturbance event. When a suitable interconnected set of disturbable cells is found, a seed cell is randomly selected, and the disturbance is grown to size around the seed into the surrounding disturbable cells.
Finally, a new event size is randomly sampled, and the process repeats until all the aspatial disturbed area is placed. Because the algorithm is stochastic, it is unlikely to draw a combination of event sizes that exactly equal the total aspatial disturbed area. Therefore, it terminates when the total disturbed area falls within 1% of the aspatial data.
Sample runs
We used the FDBA algorithm to run four scenarios, yielding 0.22° output for fire and harvest (Table 4, Fig. 4). Each scenario requires a separate run using different combinations of the input files resulting from the harmonization and different historical trajectories (Table 4). These runs result in eight files in total. Four fire-forcing files that correspond to four scenarios (Table 4) and four harvest-forcing files, one for each respective fire-forcing. The low scenario uses any of the four files with disturbance disabled before 1918 (i.e., Vector_Inferred for Vector_Low or Raster_Low). To improve the algorithm’s computational efficiency, each province and territory is run individually, except Nunavut and the Northwest Territories. These two regions were merged due to their limited forested area and Nunavut’s relatively recent establishment in 1999. We tested the contiguous placement algorithm to verify functionality, but did not carry out Canada-wide runs with the contiguous placement algorithm because of the computational expense and the number of runs (on the order of tens to hundreds) needed to obtain a meaningful ensemble of forcings. We nonetheless included the contiguous placement tool in the final repository of available materials because it may be useful for work at regional to provincial scales.
Data Records
The data, code, and all other materials for this publication are available via Zenodo at https://doi.org/10.5281/zenodo.1485399571. A catalog of extant Canada domain disturbance datasets we found during this analysis is available as an Excel spreadsheet (.xlsx). The harmonized raw vector product is available as a shape file (.shp). The eight 0.22-degree LSM forcings are available in netCDF (.nc). Finally, the FDBA tool and driving files used to create the eight LSM forcings are likewise available.
Technical Validation
We examined the relative contributions of the spatial and aspatial data to the outputs using the percentage of total disturbance that is known (i.e., from spatial data). This metric indicates the certainty of the disturbances in the dataset in a given year. A high percentage of known disturbance indicates the algorithm is primarily drawing from vector spatial data, and therefore, the location and size of the individual disturbances are more reliable. A lower percentage of known disturbance (based on spatial data) indicates that a larger proportion of the disturbance events are naïvely placed based upon aspatial data. The percentage varies greatly from year to year within Canada (Fig. 8). Thus, the certainty is generally lower when using the raster bias-corrected aspatial data as opposed to the vector bias-corrected aspatial data. This is because the choice between these two datasets during the satellite era influences the bias-corrected aspatial total disturbance, and only vector data is available for comparison before the satellite era (Fig. 4). Before 1900, almost no spatial data is available (except for a handful of polygons in Quebec), and as a result, the percentage of known disturbance is low (Fig. 8b). After 1900, spatial data becomes increasingly available, and the percentage of known disturbance trends upward until 1985, when the algorithm relies solely on spatial data. Before 1950, almost all years used aspatial data to supplement the spatial disturbance data and match total disturbance to the aspatial data (Fig. 4). 60% and 97% of years have known disturbance that exceeds the vector bias-corrected and raster bias-corrected aspatial data, respectively (i.e., the percentage of known disturbance exceeds 100%) between 1950 and 1985, meaning no aspatial data are required to supplement the spatial data. This trend implies that the spatial data are more complete and in agreement with the aspatial data during this period than before 1950.

(a) Total bias-corrected aspatial raster and aspatial vector fire, and (b) the percentage of known disturbance derived by comparing bias-corrected aspatial data to spatial vector data. (c) Total bias-corrected aspatial harvest, and (d) the percentage of known disturbance derived by comparing bias-corrected aspatial data to spatial vector data. When the percentage of known disturbance exceeds 100%, the spatial data accounts for or exceeds the disturbed area in the aspatial data.
Harvest accounts for a relatively small fraction of disturbance Canada-wide as compared to fire (Fig. 8a,c). Nonetheless, the percentage of known disturbance for harvest never exceeds ~40%. This further reinforces that this data is less complete than that available for fire (Fig. 8d). Before 1955, only 2% or less of the total aspatial data is accounted for by known harvest data. We encourage end users in LSM applications to consider the relative contribution of aspatial and spatial data and, by extension, the certainty of the spatial distribution of disturbance when interpreting model output and carrying out sensitivity analyses.
We also examine the level of correspondence between disturbance and stand age by looking at the stand age window size, which is adaptively determined by the FDBA (see “FDBA Algorithm overview”). If not enough disturbable cells are available to satisfy the aspatial disturbance data, the stand age window size for that year increases. If stand age, the spatial data, aspatial data, and our user-determined parameters were perfectly consistent, the stand age window would be zero. When the aspatial harvest data are placed, the level of agreement between these datasets and their uncertainty is reflected by the stand age window size. It also reflects the influence of processes other than stand-replacing disturbance on stand age (e.g., extreme weather, drought, windthrow, disease, insects).
A distinct pattern in the stand age window size arises in the raster_Inferred scenario with naïve splits (Fig. 9a). Before 1918, the Canada-wide stand age window size slowly trends upwards. In 1985, stand age as tracked by the algorithm is heavily influenced by known fire data, both due to the methodology by which the stand age dataset was created46 and the data ingested by the algorithm before 1985 (Fig. 9a). Therefore, the stand age window increases gradually as more aspatial harvest is placed, and the naïve placement of aspatial disturbance influences stand age. Comparing the stand age window sizes for British Columbia, which has some of the most extensive data (Fig. 1, Tables 1,2), with Newfoundland and Labrador further reinforces this. For British Columbia, stand age window size remains low into the early 1900s as there were no years where the known spatial data did not match or exceed the partitioned aspatial values for the province. In 1917, the “Inferred” scenario based on 1920s stand age is applied, and the total disturbed area increases from ~1.79 to 5.2 Mha (Fig. 4). This leads to a corresponding jump in stand-age window size (Fig. 9a). This reinforces that this disturbance may include unreasonably high preindustrial disturbance, which exceeds all but the most extreme years in the satellite era. It also reflects that the algorithm avoids burning younger stands regardless of their proximity to other placed events unless the stand age window is sufficiently large.

Stand age window size from the forest disturbance back assignment algorithm for (a) the raster_Inferred scenario and (b) the corresponding raster_harvest scenario.
Despite the linear decrease in harvest after 1918, harvest also exhibits a substantial increase in stand age window size following the shift to the “Inferred” scenario (Fig. 9b). In the FDBA algorithm, any cell that is considered harvestable can also burn; fire is given priority over harvest, and no cell can be disturbed twice in a single year. Many cells eligible for harvest likely burned at the 1917 transition from ~1.79 to 5.2 Mha burned in the “Inferred” scenario, necessitating a large increase in the stand age window size for harvest.
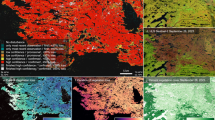
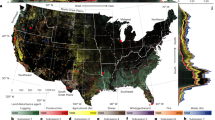
Across Canada, the allocation of fire and harvest yields realistic patterns across the landscape when comparing the 1740–2018 raster_Inferred scenario totals to the 1985–2018 raster data (Figs. 10, 11). Some regions appear more heavily disturbed in a relative sense due to the process of placing disturbance than in observed data. Southern Quebec is likely more heavily disturbed because of the high fraction of aspatial Canada-wide fire allocated to the province (Table 3), naive disturbance placement, and the abundance of spatial data in the region (Fig. 2). Northern Saskatchewan and the southern Northwest Territories have a high allocation of aspatial Canada-wide fire (Table 3), and a relatively small portion of the provinces is classified as forested, meaning disturbance is heavily concentrated. For harvest, the spatial patterns are markedly different because placement is further constrained by the forest tenures, meaning a much smaller area is harvestable (Fig. 11). This is most apparent in the far north, where only a few harvest tenures are located. Some smaller provinces like New Brunswick and Nova Scotia have highly concentrated placed harvest. This is likely a product of the small proportion of New Brunswick and Nova Scotia that is classified as forested, as well as the fact that these provinces encompass a large fraction of Canada’s harvest in the satellite era (Table 3). Other larger provinces with more forested tenures have more evenly placed harvests (e.g., British Columbia or Quebec). The FDBA algorithm yields a reasonable distribution for fire and harvest Canada-wide. These forcings are suitable for bridging the gap between an LSM spin-up and the historical period, but these characteristics should be thoroughly evaluated before use in regional modeling applications or non-LSM applications.

The normalized distribution of fire disturbance between 1740 and 2018 for the raster_Inferred fire scenario and the fire data from the raster data between 1985–2020. The points visualize each 0.22° × 0.22° grid cell normalized by their range. The normalization allows for more direct visualization of the spatial patterns, given the length of the two different periods shown.

The normalized distribution of harvest disturbance between 1740 and 2018 for the raster_Inferred fire scenario and the raster harvest between 1985–2020. The points visualize each 0.22° × 0.22° grid cell normalized by their range. The normalization allows for more direct visualization of the spatial patterns, given the length of the two different periods shown.
Usage Notes
Our goal was to integrate the sparser spatial data of forest disturbance with aspatial data covering the same periods to create prototypical spatially explicit disturbance forcings for Canada-wide LSM applications71. These forcings need to extend far back in time to bridge the gap between model spin-up and the historical period. Users must remember that the spatial and temporal patterns in the 0.22-degree outputs are a product of the input data and parameters. As such, the 0.22-degree dataset should not be used for trend analysis. Any trends therein are inherited from the aspatial data that supplements the incomplete spatial data. Users interested in trend analysis should consult the raw data inventoried herein and carefully evaluate its suitability. The raw harmonized polygon data may also contribute to a wide range of research efforts focused on forest fire and harvest within Canada, but again, its suitability should be assessed carefully. The algorithm partitions the Canada-wide aspatial data into provincial totals based on the fraction of total harvest and burned area each province accounts for in the raster (NFIS) data during the period 1985–2020. Therefore, the algorithm and resulting products assume no change in the distribution of disturbance over time (i.e., due to changes in the distribution of the population). This assumption is required due to the types of input data available and the need for the algorithm to carry out calculations in multi-machine parallel, split by province. In an LSM context, this assumption likely has negligible impacts, given that analogous aspatial43 and spatial72 models of Canada’s carbon cycle yield similar results at broad scales. The algorithm could be adapted to develop LSM drivers for regions other than Canada, assuming similar datasets are available or expanded to incorporate additional criteria to inform the partitioning of historical disturbance.
Based on our analysis of the input datasets and our algorithm, our fire product captures stand-replacing uncontrolled burns of combustible vegetation primarily on forested land (see “Spatial Data”, “Aspatial Data”, and “Supplementary datasets”). Our harvest product captures clear-cut commercial timber harvest and thinning of trees, but not salvage harvest carried out after a prior non-stand-replacing disturbance event. Both fire and harvest disturbance events in remote and non-forest areas are better represented in the satellite era than in earlier years. Due to the data needs of the algorithm, disturbance inferred from aspatial data exclusively captures disturbance events in forests. We chose not to filter any of the observational datasets to forested land alone to preserve as much of the original information as possible, in line with our focus on LSMs and disturbances’ role in the carbon cycle. Before 1918, no aspatial data were available to inform the disturbance forcings. Therefore, we provide a set of prototypical scenarios that represent a high-end (i.e., Inferred), average (i.e., Mean), and low-end (i.e., no disturbance before 1918) for analyzing the sensitivity of LSMs to disturbance (see “Extension of disturbance before 1918 and resultant scenarios”). Any uncertainties present in the underlying raster or vector datasets are transferred into the subsequent final products during analysis. In the case of the satellite-derived disturbance history and stand age data used, this could include the impacts of the temporal resolution of the underlying data (i.e., the quantity of high-quality scenes available, atmospheric effects, and errors of omission or commission in the data classification algorithms. The two sets of outputs created using the raster and vector input data likely capture but exceed (i.e., due to the difference in methods) the magnitude of the errors introduced by these effects. Finally, users must keep in mind that these datasets draw upon land cover information referenced to the satellite era (see “Supplementary datasets”). They are best suited to LSM applications aimed at understanding the historical and present-day influence of disturbance on the landscape using land cover that does not vary in time.
Due to data licensing, harvest for Saskatchewan is not included in the harmonized raw vector product or FDBA algorithm input files. However, it is considered in the eight 0.22-degree LSM forcings. Those interested in the raw data must contact the province to arrange licensing and access.
Code availability
The code that supports this publication is archived on Zenodo at https://doi.org/10.5281/zenodo.14853995.
References
Keenan, T. F. & Williams, C. A. The Terrestrial Carbon Sink. Annu. Rev. Environ. Resour. 43, 219–243 (2018).
Lenton, T. M. et al. Tipping elements in the Earth’s climate system. Proc. Natl. Acad. Sci. USA. 105, 1786–1793 (2008).
Boulanger, Y. et al. Changes in mean forest age in Canada’s forests could limit future increases in area burned but compromise potential harvestable conifer volumes. Can. J. For. Res. 47, 755–764 (2017).
Stocks, B. J. et al. Large forest fires in Canada, 1959–1997. J. Geophys. Res. 108 (2002).
Jain, P. et al. Canada Under Fire–Drivers and Impacts of the Record-Breaking 2023 Wildfire Season. (2024).
Hope, E. S., McKenney, D. W., Pedlar, J. H., Stocks, B. J. & Gauthier, S. Wildfire Suppression Costs for Canada under a Changing Climate. PLoS One 11, e0157425 (2016).
White, J. C., Wulder, M. A., Hermosilla, T., Coops, N. C. & Hobart, G. W. A nationwide annual characterization of 25 years of forest disturbance and recovery for Canada using Landsat time series. Remote Sens. Environ. 194, 303–321 (2017).
Curasi, S. R., Melton, J. R. & Humphreys, E. R. Implementing a dynamic representation of fire and harvest including subgrid-scale heterogeneity in the tile-based land surface model CLASSIC v1. 45. Geoscientific Model Development 17, 2683–2704 (2024).
Curasi, S. R. et al. Evaluating the performance of the Canadian Land Surface Scheme Including Biogeochemical Cycles (CLASSIC) tailored to the pan-Canadian domain. Journal of Advances in Modeling Earth Systems 15, e2022MS003480 (2023).
Friedlingstein, P. et al. Global carbon budget 2021. Earth System Science Data 14, 1917–2005 (2022).
Peng, Y. et al. Climate and atmospheric drivers of historical terrestrial carbon uptake in the province of British Columbia, Canada. Biogeosciences 11, 635–649 (2014).
Chaste, E. et al. The pyrogeography of eastern boreal Canada from 1901 to 2012 simulated with the LPJ-LMfire model. Biogeosci. Discuss. 1, 33 (2017).
Hayes, D. J. et al. Reconciling estimates of the contemporary North American carbon balance among terrestrial biosphere models, atmospheric inversions, and a new approach for estimating net ecosystem exchange from inventory-based data. Glob. Chang. Biol. 18, 1282–1299 (2012).
Nabel, J. E. M. S., Naudts, K. & Pongratz, J. Accounting for forest age in the tile-based dynamic global vegetation model JSBACH4 (4.20p7; git feature/forests) – a land surface model for the ICON-ESM. Geosci. Model Dev. 13, 185–200 (2020).
Hanes, C. C. et al. Fire-regime changes in Canada over the last half century. Can. J. For. Res. 49, 256–269 (2019).
Girardin, M. P. & Mudelsee, M. Past and future changes in Canadian boreal wildfire activity. Ecol. Appl. 18, 391–406 (2008).
Walker, X. J. et al. Fuel availability not fire weather controls boreal wildfire severity and carbon emissions. Nat. Clim. Chang. 10, 1130–1136 (2020).
Kirchmeier-Young, M. C. et al. Human driven climate change increased the likelihood of the 2023 record area burned in Canada. Npj Clim. Atmos. Sci. 7, 316 (2024).
Pelletier, F., Cardille, J. A., Wulder, M. A., White, J. C. & Hermosilla, T. Revisiting the 2023 wildfire season in Canada. Science of Remote Sensing 10, 100145 (2024).
Byrne, B. et al. Carbon emissions from the 2023 Canadian wildfires. Nature 633, 835–839 (2024).
Curasi, S. R., Melton, J. R., Arora, V. K., Humphreys, E. R. & Whaley, C. H. Global climate change below 2 °C avoids large end century increases in burned area in Canada. Npj Clim. Atmos. Sci. 7, 1–11 (2024).
Natural Resources Canada. Cost of wildland fire protection. https://natural-resources.canada.ca/climate-change/climate-change-impacts-forests/forest-change-indicators/cost-fire-protection/17783 (2015).
Tymstra, C., Stocks, B. J., Cai, X. & Flannigan, M. D. Wildfire management in Canada: Review, challenges and opportunities. Progress in Disaster Science 5, 100045 (2020).
Black, C., Tesfaigzi, Y., Bassein, J. A. & Miller, L. A. Wildfire smoke exposure and human health: Significant gaps in research for a growing public health issue. Environ. Toxicol. Pharmacol. 55, 186–195 (2017).
Matz, C. J. et al. Health impact analysis of PM2.5 from wildfire smoke in Canada (2013–2015, 2017–2018). Sci. Total Environ. 725, 138506 (2020).
Weber, M. G. & Flannigan, M. D. Canadian boreal forest ecosystem structure and function in a changing climate: impact on fire regimes. Environ. Rev. 5, 145–166 (1997).
Drushka, K. Canada’s Forests: A History. (McGill-Queen’s University Press, Montreal, 2003).
Hoffman, K. M. et al. Conservation of Earth’s biodiversity is embedded in Indigenous fire stewardship. Proc. Natl. Acad. Sci. USA. 118, e2105073118 (2021).
Stephens, S. L. et al. Fire, water, and biodiversity in the Sierra Nevada: a possible triple win. Environ. Res. Commun. 3, 081004 (2021).
Parks, S. A. et al. A fire deficit persists across diverse North American forests despite recent increases in area burned. Nat. Commun. 16, 1493 (2025).
Odum, E. P. The strategy of ecosystem development: An understanding of ecological succession provides a basis for resolving man’s conflict with nature. Science 164, 262–270 (1969).
Berch, S., Morris, D. & Malcolm, J. Intensive forest biomass harvesting and biodiversity in Canada: A summary of relevant issues. For. Chron. 87, 478–487 (2011).
Seiler, C. et al. Are terrestrial biosphere models fit for simulating the global land carbon sink? J. Adv. Model. Earth Syst. 14 (2022).
Curasi, S. R., Melton, J. R., Arora, V. K., Humphreys, E. R. & Cynthia, W. Canada’s wildfire future: climate change below a 2 °C global target avoids large increases in burned area by the end of the century. Research Square (2024).
Rabin, S. S. et al. The Fire Modeling Intercomparison Project (FireMIP), phase 1: experimental and analytical protocols with detailed model descriptions. Geosci. Model Dev. 10, 1175–1197 (2017).
Hantson, S. et al. Quantitative assessment of fire and vegetation properties in simulations with fire-enabled vegetation models from the Fire Model Intercomparison Project. Geosci. Model Dev. 13, 3299–3318 (2020).
Riley, K., Webley, P. & Thompson, M. Natural Hazard Uncertainty Assessment: Modeling and Decision Support. (John Wiley & Sons, 2016).
Stocks, B. J. et al. The Canadian Forest Fire Danger Rating System: An overview. For. Chron. 65, 450–457 (1989).
Boulanger, Y., Parisien, M.-A. & Wang, X. Model-specification uncertainty in future area burned by wildfires in Canada. Int. J. Wildland Fire 27, 164–175 (2018).
Smyth, C. et al. Development of a prototype modeling system to estimate the GHG mitigation potential of forest and wildfire management. MethodsX 10, 101985 (2023).
Ju, W. & Chen, J. M. Simulating the effects of past changes in climate, atmospheric composition, and fire disturbance on soil carbon in Canada’s forests and wetlands. Global Biogeochem. Cycles 22 (2008).
Pongratz, J. et al. Models meet data: Challenges and opportunities in implementing land management in Earth system models. Glob. Chang. Biol. 24, 1470–1487 (2018).
Chen, J., Chen, W., Liu, J., Cihlar, J. & Gray, S. Annual carbon balance of Canada’s forests during 1895–1996. Global Biogeochem. Cycles 14, 839–849 (2000).
Van Wagner, C. E. The historical pattern of annual burned area in Canada. For. Chron. 64, 182–185 (1988).
Global Forest Watch Canada. Canada’s Forests at a Crossroads: An Assessment in the Year 2000 (2000).
Maltman, J. C., Hermosilla, T., Wulder, M. A., Coops, N. C. & White, J. C. Estimating and mapping forest age across Canada’s forested ecosystems. Remote Sens. Environ. 290, 113529 (2023).
Skakun, R. et al. Extending the National Burned Area Composite Time Series of Wildfires in Canada. Remote Sensing 14, 3050 (2022).
Stinson, G. et al. An inventory-based analysis of Canada’s managed forest carbon dynamics, 1990 to 2008. Glob. Chang. Biol. 17, 2227–2244 (2011).
Kurz, W. A., Stinson, G., Rampley, G. J., Dymond, C. C. & Neilson, E. T. Risk of natural disturbances makes future contribution of Canada’s forests to the global carbon cycle highly uncertain. Proc. Natl. Acad. Sci. USA. 105, 1551–1555 (2008).
Kurz, W. A. et al. Mountain pine beetle and forest carbon feedback to climate change. Nature 452, 987–990 (2008).
Hermosilla, T., Wulder, M. A., White, J. C. & Coops, N. C. Prevalence of multiple forest disturbances and impact on vegetation regrowth from interannual Landsat time series (1985–2015). Remote Sens. Environ. 233, 111403 (2019).
Senf, C., Seidl, R. & Hostert, P. Remote sensing of forest insect disturbances: Current state and future directions. Int. J. Appl. Earth Obs. Geoinf. 60, 49–60 (2017).
Acil, N., Sadler, J. P., Senf, C., Suvanto, S. & Pugh, T. A. M. Landscape patterns in stand-replacing disturbances across the world’s forests. Nat. Sustain. 1, 13 (2024).
Jarron, L. et al. Differentiation of alternate harvesting practices using annual time series of Landsat data. Forests 8, 15 (2016).
Natural Resources Canada. Canadian National Fire Database. http://cwfis.cfs.nrcan.gc.ca/datamart (2021).
Hermosilla, T. et al. Mass data processing of time series Landsat imagery: pixels to data products for forest monitoring. International Journal of Digital Earth 9, 1035–1054 (2016).
Hermosilla, T., Wulder, M. A., White, J. C., Coops, N. C. & Hobart, G. W. Regional detection, characterization, and attribution of annual forest change from 1984 to 2012 using Landsat-derived time-series metrics. Remote Sens. Environ. 170, 121–132 (2015).
Skakun, R., Whitman, E., Little, J. M. & Parisien, M.-A. Area burned adjustments to historical wildland fires in Canada. Environ. Res. Lett. 16, 064014–064014 (2021).
Stinson, G. et al. A new approach for mapping forest management areas in Canada. For. Chron. 95, 101–112 (2019).
Gonçalves, A. C. Thinning: An Overview. Silviculture https://doi.org/10.5772/intechopen.93436 (2020).
Moulinier, J., Brais, S., Harvey, B. D. & Koubaa, A. Response of Boreal Jack Pine (Pinus banksiana Lamb.) Stands to a Gradient of Commercial Thinning Intensities, with and without N Fertilization. For. Trees Livelihoods 6, 2678–2702 (2015).
Mäkinen, H. & Isomäki, A. Thinning intensity and growth of Norway spruce stands in Finland. Forestry 77, 349–364 (2004).
Beyer, R., Krapp, M. & Manica, A. An empirical evaluation of bias correction methods for palaeoclimate simulations. Clim. Past 16, 1493–1508 (2020).
Kurz, W. A., Apps, M. J., Beukema, S. J. & Lekstrum, T. 20th century carbon budget of Canadian forests. Tellus B Chem. Phys. Meteorol. 47, 170–177 (1995).
Kurz, W. A. & Apps, M. J. A 70-year retrospective analysis of carbon fluxes in the Canadian forest sector. Ecol. Appl. 9, 526–547 (1999).
Melton, J. R. et al. CLASSIC v1. 0: the open-source community successor to the Canadian Land Surface Scheme (CLASS) and the Canadian Terrestrial Ecosystem Model (CTEM)–Part 1: Model framework and site-level performance. Geoscientific Model Development 13, 2825–2850 (2020).
Seiler, C., Melton, J. R., Arora, V. K. & Wang, L. CLASSIC v1. 0: the open-source community successor to the Canadian Land Surface Scheme (CLASS) and the Canadian Terrestrial Ecosystem Model (CTEM)–Part 2: Global benchmarking. Geoscientific Model Development 14, 2371–2417 (2021).
Forest Practices Board. Harvesting of Young Stands in BC. (2018).
Forestry Branch of Manitoba Conservation. Wood Supply Analysis Report for Forest Management Unit 13 and 14. (2004).
Manitoba Natural Resources and Northern Development. Appendix V. Yield Curves. http://www.gov.mb.ca/nrnd/forest/pubs/wood-supply/appendix5.pdf.
Beaver, J. & Curasi, S. High-resolution Canada domain Forest disturbance forcings suitable for land surface modeling applications. Zenodo https://doi.org/10.5281/ZENODO.14853995 (2025).
Chen, J. M. et al. Spatial distribution of carbon sources and sinks in Canada’s forests. Tellus B Chem. Phys. Meteorol. 55, 622–641 (2003).
Acknowledgements
The authors would like to thank Carolyn Smyth and Juha Metsaranta for their thoughts and comments on this work. We acknowledge the support of the Natural Sciences and Engineering Research Council of Canada (NSERC) grant ALLRP 556430-2020 (The Canadian Optimized High-Resolution Representation of the National Terrestrial Carbon Cycle; COHERENT-C). The works published in this journal are distributed under the Creative Commons Attribution 4.0 License. This license does not affect the Crown copyright work, which is reusable under the Open Government License (OGL). The Creative Commons Attribution 4.0 License and the OGL are interoperable and do not conflict with, reduce, or limit each other.
Author information
Authors and Affiliations
Contributions
S.R.C. and J.B. conceived of the analysis and methodology. J.B. conducted the formal analysis, visualization, algorithm development, and wrote the original draft. S.R.C. oversaw the work. J.R.M. and E.R.H. obtained funding for, initiated, and oversaw the project. All authors contributed to writing and editing the manuscript.
Corresponding author
Ethics declarations
Competing interests
The authors declare no competing interests.
Additional information
Publisher’s note Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Supplementary information
Rights and permissions
Open Access This article is licensed under a Creative Commons Attribution-NonCommercial-NoDerivatives 4.0 International License, which permits any non-commercial use, sharing, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons licence, and indicate if you modified the licensed material. You do not have permission under this licence to share adapted material derived from this article or parts of it. The images or other third party material in this article are included in the article’s Creative Commons licence, unless indicated otherwise in a credit line to the material. If material is not included in the article’s Creative Commons licence and your intended use is not permitted by statutory regulation or exceeds the permitted use, you will need to obtain permission directly from the copyright holder. To view a copy of this licence, visit http://creativecommons.org/licenses/by-nc-nd/4.0/.
About this article

Cite this article
Beaver, J., Curasi, S.R., Melton, J.R. et al. High-resolution Canada domain disturbance forcings suitable for land surface modeling applications. Sci Data 12, 1469 (2025). https://doi.org/10.1038/s41597-025-05123-4
Received:
Accepted:
Published:
DOI: https://doi.org/10.1038/s41597-025-05123-4
