
Abstract
On 17 October 2015, a mountainside collapse at the terminus of Tyndall Glacier in southeast Alaska generated a landslide-triggered mega-tsunami. The landslide sent approximately 7.6 × 107 m3 of rock and glacial sediment into Taan Fjord, abruptly displacing the water. The ensuing tsunami reached a peak runup of ~193 m on a steep slope directly across from the landslide, ranking among the highest tsunami runups ever documented. The wave inundated over 20 km² of terrain around Taan Fjord and Icy Bay, stripping forests and depositing sediment up to hundreds of meters inland. In 2016, a comprehensive field campaign surveyed the event, recording precise tsunami runup elevations, flow depths, and inundation distances at dozens of sites throughout the fjord and adjacent coastlines. Here we present the resulting datasets: a georeferenced catalogue of tsunami runup measurements, high-resolution topography and bathymetry data, and an extensive collection of field photographs. These data provide a quantitative record of a mega-tsunami’s onshore effects, intended as a benchmark dataset for landslide-tsunami modeling and hazard assessment.
Similar content being viewed by others
Background & Summary
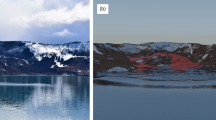
On October 17, 2015, a massive landslide and tsunami occurred in Taan Fjord, Alaska, an arm of Icy Bay in the remote Wrangell–St. Elias region, as shown in Fig. 1. The sequence began at 8:19 PM (Alaska Daylight Time) with the sudden collapse of a steep, glacier-carved slope at the terminus of Tyndall Glacier1. An estimated 180 million metric tons of rock broke free and plunged into the fjord waters2. This ranks the event among the largest non-volcanic landslides in North American history by volume. The impact of the landslide into the fjord displaced an enormous volume of water, generating a tsunami. Field and remote-sensing analyses later revealed that the tsunami reached runup elevations up to ~193 m above sea level on the opposite fjord wall1. This is one of the highest tsunami runups ever recorded globally – surpassed only by a few rare events such as the 1958 Lituya Bay mega-tsunami. Notably, all of the ten highest runups on record have been caused by landslides rather than earthquakes, underscoring the extreme, localized hazard these landslide-generated waves can pose1.

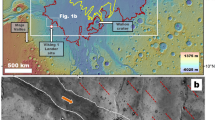
Overview of site location: (a) Wide view of Alaska and the northeast Pacific Ocean, with Yakutat region shown in the red box, (b) regional view of the Yakutat area, showing Icy Bay in the green box, and (c) Icy Bay and Taan Fjord with locations annotated and inset images of the slide location and Tyndall Glacier (upper left) and the survey team basecamp in the lower right. Map data: Google, Landsat, Maxar Technologies.
The 2015 Taan Fjord tsunami inundated an area of over 20 km² around the fjord’s periphery3, tearing out coastal forests, stripping vegetation and soils, and depositing debris high on hillslopes. The tsunami’s impact was most violent within the inner fjord near the landslide source, but significant effects were observed throughout the fjord and even at the outer bay. Directly across from the landslide, runup reached ~193 m, razing alder thickets and trees at that elevation1. Along approximately 1.5 km of shoreline adjacent to this point, runups exceeded 100 m, with the wave overrunning more than 1 km2 of terrain above 100 m elevation1. Further down-fjord, the tsunami’s influence was highly variable – shaped by fjord geometry and shoreline orientation – but generally diminished with distance from the source, dropping to runup heights on the order of 15–30 m near the mouth of Taan Fjord (~17 km from the landslide, Mageet and Kageet Points in Fig. 1)1. At the entrance of Icy Bay, outside the fjord, only subtle evidence of the wave remained; minimum detectable runups of ~4–5 m were recorded on the outer bay shorelines and across the fjord at Fageet Point1. The tsunami’s energy, however, did propagate beyond the bay: a small tsunami signal (~0.08 m amplitude) was recorded about 140 km away at the Yakutat tide gauge, with a characteristic ~40-minute wave period2.
Within hours of the landslide, far from any eyewitnesses, scientists detected its occurrence through global seismic networks. The landslide’s force was recorded as a long-period seismic signal, which researchers at Columbia University’s Lamont-Doherty Earth Observatory analyzed in near-real-time. The seismic inversion technique4 accurately estimated the landslide’s bulk parameters – on the order of 108 tons mass and duration ~100 seconds – and even pointed to its likely location and direction of motion5. However, seismic data alone could not confirm whether a tsunami had been generated. In the days following the event, satellite imagery provided the first visible evidence: new shoreline scars and vegetation loss at elevations exceeding 100 m were apparent, strongly suggesting a large tsunami had swept the fjord1. These early clues prompted a coordinated field response the next spring to investigate and document the tsunami’s effects on the ground.
In 2016, a multi-institutional team conducted three dedicated field surveys (in April, June, and August) to measure the Taan Fjord tsunami’s impacts systematically. The field response was challenging due to the remoteness and scale of the area affected. Access to Icy Bay was achieved by boat (from Yakutat), with additional support from a small airplane and helicopter for personnel and equipment transport. Travel within Taan Fjord itself required small vessels – inflatable boats, skiffs, and packrafts – to reach steep shorelines and narrow inlets. Despite logistical difficulties (including ice-packed Bay waters, dense vegetation, steep unstable terrain, and wildlife, e.g. see Fig. 2), the team successfully surveyed essentially all tsunami-affected shorelines throughout Taan Fjord and outer Icy Bay. These surveys focused on identifying tsunami high-water marks and runup indicators, such as trim lines on hillslopes, mud or silt splatter on rocks and tree trunks, snapped or bent trees, debris wedged in branches, and deposits of driftwood or sediment. At each significant marker, the team measured the elevation and geographic coordinates of the point, documented the observation with notes and photographs, and recorded the type of evidence. Particular effort was made in the initial April 2016 survey to capture ephemeral low-elevation indicators before spring growth and rain could obscure them. This early “reconnaissance” survey, with a small 4-person crew, focused on easily accessible low runup sites and served to assess field conditions. The main survey in June 2016 involved a larger interdisciplinary team and aimed to perform a comprehensive tsunami runup survey across Taan Fjord and adjacent coastlines. Finally, a follow-up survey in August 2016 targeted a few remaining unsurveyed areas and gaps from the earlier efforts (due to time or weather constraints). By the end of the summer, the field team had collected a near-complete set of runup measurements and observations, spanning from the inner fjord near the landslide scar all the way to the outer limits of discernible tsunami effects in Icy Bay.

Various photographs from the runup surveys. (a) Photo taken near basecamp looking across the fjord to the west; note the overwashed and re-worked land in the foreground, and the very clear trimline in the distance on the opposite shoreline. In the area where this photograph was taken, the flow depths were ~20 m, and the runup elevation on the opposite shoreline is 28 m. (b) Same location as photograph in (a), but looking to the east, away from the fjord, showing the wide swash of downed trees which the team traversed to determine the runup extent. (c) A typical example of a runup measurement, where the wrack line of small branches and leaves is evident on the ground; the green pole is the survey pole connected to the RTK rover. (d) Example of the challenges in traveling throughout the fjord. This photo is in the Fageet Point area, with a shoreline packed with ice, necessitating travel by small helicopter. (e) An example of the RTK base station setup in a remote area of the fjord, near Kageet Point. (f) An example of a “runup_min” measurement on a very steep slope northeast of basecamp, where the only flow markers on the barren slope were foreign branches tangled into the existing vegetation.
Several scientific studies have already resulted from the Taan Fjord event, leveraging portions of the field data. For example, Higman et al.1 integrated the preliminary runup measurements, bathymetry, and satellite imagery to present a high-level analysis the event, concluding that this landslide tsunami was a clear consequence of deglaciation and providing first-order validation for numerical landslide-tsunami models. Dufresne et al.6 examined the landslide’s sedimentology and geomorphology, describing how the slide debris was distributed across glacier, land, and fjord environments. Haeussler et al.2 focused on the submarine deposit, using the new bathymetric and seismic data to detail the volume and internal structure of the slide material on the fjord bottom. Haeussler et al.2 also presented a post-event LiDAR dataset, from which they inferred the tsunami inundation extent from trim lines. Bloom et al.3 analyzed the landscape changes from the tsunami, noting how ~8 square miles of forest were destroyed and how the tsunami-induced erosion and deposition patterns could be quantified from post-event models.
Despite these analyses, a wealth of data from the Taan Fjord event remains available for further research. The purpose of this paper is to compile and describe the full set of tsunami runup data collected in 2016, and to facilitate their reuse. Notably, this paper includes the runup survey data that has not been previously published or available elsewhere. By publishing these data in a curated form, we enable other researchers to examine details not fully explored in initial studies – for example, fine-scale variations in runup around complex topography, comparisons with other historical landslide tsunamis, or new modeling approaches for landslide evolution and wave propagation. Given the rarity of events of this magnitude, the Taan Fjord dataset fills a gap and provides a benchmark for extreme landslide-generated tsunamis. The combination of precise field measurements, high-resolution topography/bathymetry, and thorough photographic documentation makes this one of the most comprehensive records of a large tsunami’s effects in a geologic setting. In an era of rapid deglaciation, similar landslide-tsunami events may become more frequent1. The data presented here will help scientists and hazard practitioners to recognize, model, and prepare for such events in Alaska and worldwide.
Methods
Tsunami runup and inundation measurements were obtained through ground surveys conducted in April, June, and August 2016. These surveys followed standard post-tsunami field measurement protocols, with adaptations to the challenging wilderness environment of Taan Fjord. The team navigated the fjord’s coastlines primarily by boat and on foot, searching for high-water marks and tsunami damage indicators at a range of elevations. Upon encountering evidence of tsunami inundation, surveyors would record the position and height of the marker relative to sea level using precision instruments.
Key instruments used during the field surveys included Real-Time Kinematic GPS (RTK-GPS) receivers, a total station, and a laser rangefinder. The RTK-GPS system provided centimeter-accurate geolocation by linking a rover unit to a base station receiver that the team established on a stable benchmark near camp each day. The base station’s coordinates were initialized by long occupation for precise differential corrections. Using the RTK rover, surveyors could directly measure the 3D position (latitude, longitude, elevation) of accessible tsunami markers with ~1–3 cm accuracy in real time. In more difficult terrain (thick brush or steep slopes), or when line-of-sight was needed, a reflector total station was deployed. The total station was set up over a known point (often one of the temporary RTK monuments established across the fjord) and then used to optically survey tsunami high-water marks via a prism pole. Typical precision for the total station measurements was on the order of ±1–2 mm for horizontal distance and ±0.001° in angle over ranges of a few hundred meters, with an additional ~5 cm potential error budgeted for the human operator positioning the prism pole on uneven ground.
For inundation limits that were unsafe or impossible to physically approach, a handheld laser rangefinder was utilized. The rangefinder was often used in tandem with the RTK-GPS or total station: the surveyor would stand at a known position (recorded by GPS) and then shoot the laser to measure the distance, vertical angle, and bearing to the tsunami marker. The rangefinder’s accuracy is lower than direct GPS/total station measurements – on the order of ±0.3 m in distance and ±0.25° in inclination for typical ~50 m shots. The combined angular and range uncertainties translate to roughly ±0.3 m vertical uncertainty in elevation for a 50 m distant target. The operator’s steadiness also introduced a small error (estimated ~ ± 0.1 m vertically when aiming handheld). Despite these larger uncertainties, the laser method was invaluable for reaching inaccessible or distant markers, such as high trim lines on cliffs.
All measurement approaches were cross-referenced and calibrated whenever possible. For instance, the team established a network of survey benchmarks (monuments) throughout the fjord to serve as reference points. The RTK base station and total station set-ups were repeatedly tied into these common benchmarks, ensuring that all data shared a consistent reference frame. Many tsunami marker elevations were measured redundantly by different methods (e.g., an easy-to-access point might be measured directly with RTK and also shot with the rangefinder) to verify consistency. In general, for markers surveyed with RTK-GPS or total station, the vertical accuracy is estimated to be better than 0.1 m, whereas for those measured solely by rangefinder it is on the order of 0.2–0.3 m. These error estimates account for both instrument precision and field conditions (uneven terrain, dense vegetation, etc.). All elevations are adjusted to the tidal level at the time of the tsunami (see “Technical Validation” for details on tidal corrections).
Each tsunami marker or evidence point was classified into one of several categories to describe its physical nature and infer its significance. The primary category is “runup”, defined as the maximum vertical elevation reached by the tsunami water at that site. A runup point typically corresponds to the inland or upslope limit of inundation – for example, the upper boundary of sediment or debris left by the wave, or the elevation of the trim line. In many cases, multiple indicators at a site (such as a debris line and an abrupt change in vegetation) confirmed the runup elevation. In some locations, however, the true runup limit was not perfectly clear; vegetation or geomorphic evidence might have been obliterated or not obvious above a certain height. In such cases the team recorded a “runup_min” value – indicating a conservative minimum runup height. A “runup_min” entry signifies that tsunami inundation was observed at least up to that elevation, but it could possibly have reached higher (no definite evidence was found above that point). This designation was used only when necessarily, mainly along very steep or barren slopes where the wave’s upper limit might have been hard to discern. In the dataset, runup_min points are identified so that modelers or analysts can treat them as lower-bound constraints rather than maximum runup values.
Another measured parameter is the “flow depth”, which represents the depth of the tsunami flow above the ground at a given location. Flow depth is typically inferred from markers on vertical or standing objects – for example, the height of mud lines on building walls in populated areas, or in this wilderness context, the height to which bark was stripped or branches were broken on standing trees. In Taan Fjord’s forests, one common flow depth indicator was the abrupt trim height on tree trunks where limbs were snapped off and bark was abraded by the rushing debris-laden water. When such evidence was present, the surveyors measured the elevation of the ground and the elevation of the highest damage on the tree, and the difference gives the flow depth. These flow-depth measurements are included in the dataset as they provide insight into wave dynamics (e.g., how deep and potentially how fast the flow was at various points).
Finally, the survey dataset includes a set of “LiDAR-derived runup” points. These are high-water mark elevations obtained not by direct field measurement, but by analysis of post-tsunami LiDAR data. The inclusion of LiDAR-derived runups improves spatial coverage, especially in areas where it was unsafe or impractical for field teams to reach but where the tsunami left a distinct signature observable from the remote data. This LiDAR runup dataset has been previously published in Haeussler et al.2 and will not be discussed in detail in this paper. In conjunction with the LiDAR runup, Haeussler et al.2 generated a post-event combined bathymetric and topographic digital elevation model (DEM). We include both the DEM and the LiDAR-derived runup in this dataset for completeness, as in particular, the DEM is needed for any future numerical model study.
The tsunami runup data are shown in Figs. 3–5. Figure 3 presents an overview of all survey measurements conducted inside and adjacent to Taan Fjord. Survey coverage is extensive, and, together, the directly measured and LiDAR-inferred runup points provide a detailed depiction of tsunami inundation throughout the area. Figure 4 is a close-up of the source region, in the northern part of the fjord. Here, the maximum runup of 193 m occurs on the eastern shore directly opposite the slide, and runup elevations along this segment of the fjord range between 50 m and 100 m. Finally, Fig. 5 highlights runup and inundation in the mid-fjord. In some areas of this section, runup elevations fluctuate by approximately 30 m over horizontal distances of less than 50 m, reflecting a complex wave pattern. Although not included as figures in this paper, additional zoomed-in plots for other locations within and beyond the fjord (Fageet, Kageet, and Mageet Points) are available in the data repository.

Map of Taan Fjord all tsunami runup measurements obtained from field surveys and LiDAR analysis. Directly measured runup points are indicated by solid symbols, and LiDAR-inferred runup points by black dots. Panel (a) shows the runup elevations along the western shorelines, (b) gives the spatial location of all the measurements, and (c) shows the runup elevations along the eastern shorelines.

Close-up of the upper fjord near the landslide source, showing runup obtained from field surveys and LiDAR analysis. Directly measured runup points are indicated by solid symbols, and LiDAR-inferred runup points by black dots. Panel (a) shows the runup elevations along the western shorelines, (b) gives the spatial location of the measurements, and (c) shows the runup elevations along the eastern shorelines.

Mid-fjord runup and inundation pattern, showing runup obtained from field surveys and LiDAR analysis. Directly measured runup points are indicated by solid symbols, and LiDAR-inferred runup points by black dots. Panel (a) shows the runup elevations along the western shorelines, (b) gives the spatial location of the measurements, and (c) shows the runup elevations along the eastern shorelines.
Throughout the field surveys, notes and photographs were taken to document each measurement site. Surveyors described the nature of each mark (e.g., “debris caught in alder branches ~6 m above ground” or “trim line on grassy slope”), the surrounding context (vegetation type, slope angle, distance from shoreline), and any uncertainty or special conditions. Representative photographs were captured, often with survey rods or persons for scale, to illustrate the evidence. These notes and images not only serve as a qualitative record but were also used to verify and cross-check the quantitative data during post-processing. Individuals appearing in these photographs are co-authors of this paper and have consented to inclusion of all photographs in the dataset.
Data Records
The datasets described herein are publicly archived in DesignSafe (https://www.designsafe-ci.org/) repository Project PRJ-5941 under https://doi.org/10.17603/ds2-0sek-4434, with open access for all users7. The data are organized into several components, corresponding to different aspects of the survey:
-
Tsunami Runup Measurement Dataset: This is a comprehensive spreadsheet of all tsunami runup and inundation measurements collected by the field team. Each entry in the table corresponds to a surveyed point or observation. Key attributes include:
-
Location coordinates (latitude/longitude and UTM coordinates, WGS84, Zone 7 N in meters) of the measurement point.
-
Elevation of the tsunami mark (in meters above sea level, adjusted to the tsunami occurrence time’s tidal level).
-
Measurement type/category (e.g., “runup”, “runup_min”, “flow_depth”)
-
Value (for flow depth entries, the depth in meters; for runups, this may be the same as elevation, whereas a runup_min indicates a minimum elevation reached).
-
Description – a brief text describing the evidence (e.g., “debris line in forest”, “watermark on cliff”, “broken tree tops”).
-
Survey method – which survey (April, June, or August 2016) and which instrument (RTK, total station, rangefinder, or LiDAR) was used for that point.
-
Uncertainty estimate – an estimated vertical error for that point (typically 0.1 m for RTK/total station points, ~0.3 m for rangefinder points, etc.).
-
-
Digital Elevation Models (Topography and Bathymetry): High-resolution, gridded elevation data are provided for both the terrestrial and submarine environments of Taan Fjord. Specifically, a merged topo-bathy DEM with horizontal resolution of 1 meter, which combines the LiDAR DEM on land and the bathymetric model in the fjord into a single continuous elevation model is given. This merged DEM is useful for modeling wave propagation or visualizing the full landslide and tsunami terrain in 3D. The merge was done by Haeussler et al.2, and thorough details of the processing done to create this DEM, as well as expected accuracy and precision of the various merged datasets, can be found therein.
-
Survey Photographs: A selection ~400 photographs taken during the 2016 field surveys is included as a supplementary data record. These high-resolution images (JPEG format) document various tsunami impact features: high water marks, damaged vegetation, sediment deposits, landslide scar and deposit, etc. Many photos show team members next to evidence for scale (for instance, a person standing where the tsunami trim line is visible on a slope or holding a surveying rod up to the height of broken tree branches). The photos are organized by trip, and a kml file is included to provide geolocated viewing in Google Earth and other GIS tools.
-
Loading and Plotting scripts: Various MATLAB scripts are provided to load and plot the runup survey data and the DEM, for example to create the images shown in Figs. 3–5. These scripts are well commented and accompanied by metadata which describes each one.
Each of these data records is filed with appropriate metadata in the repository. All data are released under an open license (Open Data Commons Attribution, ODC-By), permitting free use with attribution.
Technical Validation
The tsunami runup and flow depth measurements were collected with survey-grade instruments and techniques, and their accuracy was quantified both in the field and through post-processing checks. The RTK-GPS system used has an intrinsic horizontal and vertical accuracy on the order of 1–3 cm under typical conditions. Indeed, many of the high-water marks measured via RTK have estimated vertical errors of only a few centimeters, aside from any natural ambiguity in identifying the exact high-water point. The total station measurements similarly yielded centimeter-level precision in relative elevation. The internal consistency of the runup dataset is high: elevations measured directly are consistent in elevation with those derived from LiDAR.
A critical aspect of the runup elevations is the reference to the correct vertical datum (sea level at the time of tsunami). Since the tsunami occurred near low tide (~0.94 m below Mean Sea Level)2, all field-measured elevations (which were referenced to tidal level at time of survey, often at a different tide stage) had to be adjusted to reflect tsunami time sea level. During the field campaigns, the team used a water level logger, in place from June 6 to August 8 2016, and spot tide measurements in Icy Bay, and found that the tide regime inside the bay closely matched the NOAA predictions for Yakutat, with discrepancies of at most 0.14 m at high/low water and an RMS difference of ~0.03 m1. This indicates that the correction applied to each point’s elevation – to put it in terms of height above the instantaneous sea level at tsunami arrival – is known to within a few centimeters. The error introduced by this tidal referencing is on the order of 0.01–0.1 m, which is smaller than or comparable to the instrumental measurement errors for runup points. We can thus state that the overall uncertainty in the absolute runup elevation values is dominated by survey measurement error rather than tidal datum error.
The dataset has been checked for internal consistency. Each runup point’s metadata (description, photo, etc.) was cross-checked to ensure it does not contradict neighboring measurements or known patterns. For example, if one point recorded a runup of 30 m and another nearby recorded 50 m, we revisited the records to make sure they were both correct. The final dataset provides a consistent picture of tsunami runup that varies along the fjord, modulated by headlands, inlets, and the presence of moraines and other obstacles. This matches qualitative observations made in the field, such as noticing that one side of a point had much higher runup than the other due to wave shadowing – which is reflected in the data.
In summary, the technical quality of the Taan Fjord tsunami data is very high. Through careful survey practice, cross-validation with LiDAR and bathymetry, and consistency checks against geological evidence and models, we have ensured that the runup elevations and other measurements are accurate and trustworthy. We thus provide this dataset with confidence that it reliably represents the true impacts of the 2015 Taan Fjord landslide and tsunami.
Usage Notes
The published dataset from the 2015 Taan Fjord landslide tsunami is intended to be immediately usable by researchers, educators, and hazard analysts. Data are provided in common, non-proprietary formats with metadata and documentation included. Here we offer some guidance and considerations for effectively using these data:
Applications in modeling
One of the primary anticipated uses of this dataset is to serve as a benchmark for landslide-tsunami models. Researchers developing numerical models of landslide generation, wave propagation, and runup can use the Taan Fjord data to test their simulations against survey observations. For example, the detailed runup distribution provides a stringent target for model validation. We recommend users who simulate the event to incorporate the high-resolution (1-m horizontal), combined bathymetry-topography DEM provided, as the complex fjord topography (including mid-fjord moraine ridges and irregular shorelines) had a significant effect on wave behavior1,3. The dataset can be used to validate both the near-field wave impact (e.g., extreme 193 m runup opposite the slide) and the far-field attenuation, including the small tsunami recorded at Yakutat. In addition, the documented flow depths and inland inundation distances can help calibrate models for onshore flow and energy dissipation. Users should note the distinction between runup height (vertical elevation) and flow depth (water depth) in the data, and use each accordingly when comparing with model outputs.
Hazard assessment and comparative studies
The Taan tsunami data can inform assessments of similar hazards in other glacial fjords or alpine lake settings. Practitioners may compare these data with historical events (like the 1958 Lituya Bay tsunami) to glean common factors or differences. The dataset could be used to derive empirical attenuation relationships – for example, how tsunami runup height decays with distance from source in a confined fjord. We caution that local topographic focusing caused runup variability (e.g., certain embayments or headlands experienced higher or lower runup than average)1,3, so any generalized attenuation law should account for these variations. Those interested in landslide dynamics might also use the topographic data to run stability analyses or runout models for the slide itself, using the provided landslide scar and deposit volumes as constraints2.
Monitoring and warning systems
A multi‐sensor network is needed for landslide-tsunami monitoring and early warning. For example, the interagency Barry Arm program in Alaska (i.e.8) combines seismic and infrasound arrays, ground-based interferometric radar, continuous GNSS stations, and fjord pressure sensors to detect slope movement and any resulting wave in real time. Integrating these data streams through automated anomaly-detection software and linking them to alert protocols (e.g., SMS, sirens, agency dashboards) provides the fastest possible warning of potential collapse or tsunami. Repeat airborne LiDAR or UAV photogrammetry surveys and frequent satellite InSAR passes establish time-series benchmarks of slope geometry and deformation. These pre- and post-event datasets allow precise DEM differencing to quantify volume changes and validate sensor-based detections. In addition to monitoring efforts at Barry Arm, Alaska, similar activities are ongoing at the Åknes rockslide in Norway, where terrestrial laser scanning and ground‐based InSAR track slow slope deformation in near real time9. The tsunami runup dataset published here can be used in conjunction with such systems to calibrate warning thresholds and validate modelled inundation footprints, particularly through the usage of calibrated numerical models.
Educational use and visualization
The dramatic nature of the Taan Fjord tsunami makes this dataset useful for education and outreach about tsunamis and landslides. Instructors can use the photos and data to have students plot runup heights, calculate wave energy, or model wave travel time in the fjord. When using photos, note that they are in the public domain or licensed for reuse.
Limitations
Users should be aware of a few limitations. First, while the coverage of measurements is extensive, there are inevitably some unsurveyed areas – e.g., very steep cliffs where no safe observation could be made. However, given the thorough sweep and the corroboration by LiDAR, it is unlikely any higher runup went unnoticed. Second, the data represent essentially a snapshot in time (9 months after the event for field data, 1 year for LiDAR). Subsequent natural changes have occurred: the landslide deposit on the glacier surface has since mostly moved or melted out, vegetation has regrown, etc. Thus, the data should be interpreted in the context of 2015–2016 conditions. Third, for users interested in the seismic or timing aspect of the tsunami, our dataset does not directly include the time series of wave motion, as no in-situ wave gauges in the fjord existed.
In conclusion, this dataset opens many avenues for investigation into a rare and extreme landslide tsunami event. We encourage users to combine it with other data (e.g., seismic records, landslide volume and motion studies) to develop a complete understanding of the event. Any updates or errata to the data will be maintained in the repository. Users are also encouraged to cite this paper and the original sources when publishing results derived from these data.
Code availability
All survey data and scripts used to parse and plot the data can be found at the data repository on DesignSafe: https://doi.org/10.17603/ds2-0sek-4434. Data are provided with an Open Data Commons Attribution.
References
Higman, B. et al. The 2015 landslide and tsunami in Taan Fiord, Alaska. Sci. Rep. 8, 12993, https://doi.org/10.1038/s41598-018-30475-w (2018).
Haeussler, P. J. et al. Submarine deposition of a subaerial landslide in Taan Fiord, Alaska. J. Geophys. Res. Earth Surf. 123, 2443–2463, https://doi.org/10.1029/2018JF004608 (2018).
Bloom, C. K. et al. Catastrophic landscape modification from a massive landslide tsunami in Taan Fiord, Alaska. Geomorphology 353, 107029, https://doi.org/10.1016/j.geomorph.2019.107029 (2020).
Ekström, G. & Stark, C. P. Simple scaling of catastrophic landslide dynamics. Science 339, 1416–1419, https://doi.org/10.1126/science.1232887 (2013).
Gualtieri, L. & Ekström, G. Broad-band seismic analysis and modelling of the 2015 Taan Fjord, Alaska landslide using Instaseis. Geophys. J. Int. 213, 1912–1923, https://doi.org/10.1093/gji/ggy086 (2018).
Dufresne, A. et al. Sedimentology and geomorphology of a large tsunamigenic landslide, Taan Fiord, Alaska. Sediment. Geol. 364, 302–318, https://doi.org/10.1016/j.sedgeo.2017.10.004 (2018).
Lynett, P. J. et al Tsunami Runup Survey Data from the 2015 Taan Fjord Landslide Event. DesignSafe–CI https://doi.org/10.17603/ds2-0sek-4434 (2025).
Schaefer, L. N. et al. Kinematic evolution of a large paraglacial landslide in the Barry Arm fjord of Alaska. J. Geophys. Res. Earth Surf. 128, e2023JF007119, https://doi.org/10.1029/2023JF007119 (2023).
Oppikofer, T., Jaboyedoff, M., Blikra, L. H., Derron, M. H. & Metzger, R. Characterization and monitoring of the Åknes rockslide using terrestrial laser scanning. Nat. Hazards Earth Syst. Sci. 9, 1003–1019, https://doi.org/10.5194/nhess-9-1003-2009 (2009).
Acknowledgements
This survey was supported by US National Science Foundation grants CMMI-1650357 and EAR-1638979, which provided travel support for the tsunami runup surveys. The LiDAR-inferred runup data and the post-event bathymetry and topography DEM were provided by Peter Haeussler. Scott Chadwick of Yakutat Charters, Captain of the Sea Wolf, is acknowledged for navigating through challenging sea-ice conditions while transporting the survey team from Yakutat to Taan Fjord. Field work was performed with permission and cooperation from Wrangell-St. Elias National Park Service. Survey activities adhered all applicable National Park guidelines. No protected cultural or archaeological sites were disturbed.
Author information
Authors and Affiliations
Contributions
Patrick Lynett: Conceptualization, Methodology, Software, Formal analysis, Investigation, Data Curation, Writing - Original Draft, Supervision, Writing - Review & Editing. Robert Weiss: Conceptualization, Methodology, Software, Formal analysis, Investigation, Data Curation, Supervision, Writing - Review & Editing. Bretwood Higman: Conceptualization, Methodology, Formal analysis, Investigation, Writing - Review & Editing. Andrew Maddox: Conceptualization, Investigation. Adam Keen: Formal analysis, Investigation, Writing - Review & Editing. Vassilios Skanavis: Formal analysis, Investigation, Writing - Review & Editing. Hui Tang: Investigation, Writing - Review & Editing. Aykut Ayca: Formal analysis, Writing - Review & Editing. Nikos Kalligeris: Formal analysis, Writing - Review & Editing.
Corresponding author
Ethics declarations
Competing interests
The authors declare no competing interests.
Additional information
Publisher’s note Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
Open Access This article is licensed under a Creative Commons Attribution-NonCommercial-NoDerivatives 4.0 International License, which permits any non-commercial use, sharing, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons licence, and indicate if you modified the licensed material. You do not have permission under this licence to share adapted material derived from this article or parts of it. The images or other third party material in this article are included in the article’s Creative Commons licence, unless indicated otherwise in a credit line to the material. If material is not included in the article’s Creative Commons licence and your intended use is not permitted by statutory regulation or exceeds the permitted use, you will need to obtain permission directly from the copyright holder. To view a copy of this licence, visit http://creativecommons.org/licenses/by-nc-nd/4.0/.
About this article

Cite this article
Lynett, P.J., Weiss, R., Higman, B.M. et al. Tsunami Runup Survey Data From The Taan Fjord Landslide Event. Sci Data 12, 1341 (2025). https://doi.org/10.1038/s41597-025-05617-1
Received:
Accepted:
Published:
DOI: https://doi.org/10.1038/s41597-025-05617-1
