
Abstract
Viscous flow between two sinusoidally deforming curved concentric tubes is mathematically investigated for the first time. Exact solutions are computed to analyse the flow between these two tubes and graphical outcomes are included for a thorough analysis of the solutions. The present article has prime applications in endoscopy as a novel peristaltic endoscope is introduced first time for a curved sinusoidal tube. This curved nature of outer sinusoidal tube with a flexible peristaltic endoscope placed inside it covers the topic of practical applications like endoscopy of human organs having curved shapes and the maintenance of complex machineries that involve complex curve structures. The usage of a flexible peristaltic endoscope inside a curved sinusoidal tube makes the process of catheterization more comfortable.
Similar content being viewed by others

Introduction
Endoscopy is the mechanism that is utilized to examine the internal cavities of human body and it is also useful for repairing and maintenance of complex machineries. In order to meet the complex scenarios like catheterization in the human body and the restoration of machines having complex internal structures, it is very important to have a flexible endoscope rather than a rigid one. Such a flexible endoscope can easily move through curve tubes and corners while the rigid one can damage the internal cavities of body and also causes discomfort to the patient in some cases. Thus a flexible endoscope has wide range of applications both in the medicine and industry. Further, it is more useful to have a flexible endoscope that has the same shape as the shape of the cavity in which it is being inserted, since it makes the process of catheterization even more comfortable. For such practical purposes, a novel endoscope that is called a peristaltic endoscope (an endoscope having deformable sinusoidal walls) is developed and its locomotion is experimentally tested1. Such a peristaltic endoscope consists of McKibben-like actuators around the main hollow tube and each of the actuator has its own source of compressed air for expansion and a spring for contraction as well. This novel peristaltic endoscope is useful for the endoscopy of tubes that also have deformable sinusoidal walls. Rachid et al.2,3,4 had first time used this concept of peristaltic flow in a tube also having a peristaltic endoscope in it.
Peristaltic flow activity occurs within a tube having deformable sinusoidal walls which propagate the flow due to their rhythmic sinusoidal contraction and relaxation. This peristalsis mechanism is an inherited feature of the smooth tubular shape muscles present in human body. Thus it has a key role in some physiological activities that include vasomotion, functioning of ureter, gastrointestinal tract and bile duct etc5. The mathematical analysis of fluid transportation inside a tube due to deforming sinusoidal walls was first time presented by Barton and Raynor6. Pozrikidis7 had utilized the creeping flow approximations for peristaltic flow in two dimensional geometries. Since our present study deals with the peristaltic flow inside a curved tube, therefore some useful and recent researches that interpret the mathematical analysis of peristaltic flow inside curved tubes are referred as8,9,10,11,12,13,14,15. Further, the analysis of endoscopy for peristaltic flow inside a tube is also carried out by many researchers16,17,18,19 and some of the recent mathematical interpretations are also given as20,21,22,23.
We here disclose a mathematical investigation that first time interprets the peristaltic flow inside a curved tube having a flexible peristaltic endoscope in it. This curved tube has deforming sinusoidal walls and also the peristaltic endoscope placed in it has deformable sinusoidal walls. The selection of a curved sinusoidal tube for this mathematical analysis covers the practical applications like endoscopy of flexible curved tubes present in human body and maintenance of complex machineries that involve curved structures etc. Moreover, a flexible peristaltic endoscope having sinusoidally deforming walls is placed in this sinusoidal curved tube to achieve the recent advance targets in the field of endoscopy.
Mathematical model
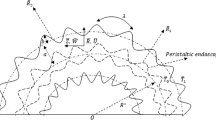
An incompressible, viscous flow between two sinusoidally deforming curved concentric tubes is mathematically interpreted. Both of these tubes have sinusoidally deforming walls, as shown in Fig. 1.

Geometrical model of the problem.
The mathematical representation of both these (i.e. outer and inner) sinusoidally deforming walls is narrated as
where \(0 < n < 1\). Since \(n = 0\) means that there is no catheter present in the tube and for \(n = 1\) means that the catheter has a radius equal to that of outer tube’s radius. Both of these cases are not of our interest that is why we have selected \(0 < n < 1\).
A dimensional mathematical representation of the governing differential equations are achieved by utilizing a curvilinear coordinate system and narrated as15
The two distinct reference frames (fixed and moving) are linked with the help of following transformation equations narrated as
The useful dimensionless terms that appeared during the mathematical computations are narrated as
The dimensionless representation of the present mathematical problem is achieved by utilizing the transformation Eqs. (5) and then the non-dimensional terms narrated in Eq. (6), into Eqs. (2–4) and we get after using \(\lambda \to \infty\) or \(R_{e} \to 0\).
The corresponding boundary conditions for this problem are
Exact solution
We have computed exact mathematical results for this present problem by utilizing Mathematica software. The velocity solution provided below is attained by solving Eq. (8) along with conditions given in Eq. (9).
Further, the rate of volumetric flow is narrated by Eq. (11) as follows
The mathematical result for pressure gradient is attained by using the above Eq. (11) and narrated as
where \(Q = F + 2\) and the pressure rise is computed numerically over single wavelength by utilizing the following equation given as
Results and discussion
The above mathematical computations are now illustrated through graphical solutions. These graphical results are computed for the velocity, pressure gradient, pressure rise and streamlines of this flow problem. Figure 2a,b present the graphical results of velocity for the non-dimensional parameters \(Q\) and \(s\) respectively. A reduction in the velocity is observed with increasing \(Q\), revealed in Fig. 2a. Thus velocity is varying inversely with increasing \(Q\) in this curved sinusoidal tube having a peristaltic endoscope in it. Figure 2b provides the graphical result of velocity for varying values of \(s\). It is noted that velocity is declining with the peristaltic endoscope wall (i.e. inner sinusoidal wall) but it is increasing with the outer sinusoidal wall of this curved tube for increasing curvature parameter \(s\). Figure 3a–d provide the graphical results of \(\frac{dp}{{dz}}\) against \(z - axis\) for various parameters involved in this study. Figure 3a provides the graphical outcome of \(\frac{dp}{{dz}}\) for increasing \(n\) (i.e. increasing radius of peristaltic endoscope). Here \(\frac{dp}{{dz}}\) is declining with an increase in the radius of peristaltic endoscope. Figure 3b shows that \(\frac{dp}{{dz}}\) increments with the evolution of peristaltic wave but it declines with shrinkage of the peristaltic wave for increasing \(\phi\). Figure 3c conveys an increase in the value of \(\frac{dp}{{dz}}\) for increasing \(Q\). An increment is noted in the value of \(\frac{dp}{{dz}}\) for increasing curvature parameter \(s\), as presented in Fig. 3d. Figure 4a,b provide the graphical solutions of \(\Delta P\) against \(Q\). A reduction in the value of \(\Delta P\) is observed with increasing \(\phi\), revealed in Fig. 4a. The numerical value of \(\Delta P\) is increasing for higher values of \(s\), depicted in Fig. 4b. Figure 5a–d presents the graphical solutions of streamlines plot for increasing \(Q\). The outer sinusoidal wall of this curved tube is evident at the upper end of graphical plot and the lower end also shows the sinusoidal pattern due to the presence of peristaltic endoscope. A reduction in the trapping phenomenon is noted for increasing \(Q\). Figure 6a–d reveal the graphical results of streamline plot for increasing curvature parameter \(s\). These outcomes show that the trapping is declining with the outer sinusoidal wall of curved tube but it is increasing with the wall of the peristaltic endoscope.

(a) Velocity plot for four values of \(Q.\) (b) Velocity plot for four values of \(s\).

(a) \(\frac{dp}{{dz}}\) plot for four values of \(n\). (b) \(\frac{dp}{{dz}}\) plot for four values of \(\phi\). (c) \(\frac{dp}{{dz}}\) plot for four values of \(Q\). (d) \(\frac{dp}{{dz}}\) plot for four values of \(s\).

(a) \(\Delta P\) plot against \(Q\) for four values of \(\phi\). (b) \(\Delta P\) plot against \(Q\) for four values of \(s\).

(a) Streamline plot for \(Q = 0.01\). (b) Streamline plot for \(Q = 0.03\). (c) Streamline plot for \(Q = 0.05\). (d) Streamline plot for \(Q = 0.07\).

(a) Streamline plot for \(s = 0.01\). (b) Streamline plot for \(s = 0.02\). (c) Streamline plot for \(s = 0.03\). (d) Streamline plot for \(s = 0.04\).
Conclusions
The Newtonian flow between two sinusoidally deforming curved concentric tubes is mathematically investigated. The present analysis has recent endoscopic applications. Some major outcomes of this analysis are as follows.
-
The application of a flexible peristaltic endoscope is helpful in the process of catheterization in curved tubes as most of the patients face discomfort due to the usage of rigid or semi-rigid endoscopes.
-
The same shape and structure of both the channel and endoscope helps to meet a wide range of medical and industrial applications.
-
This peristaltic endoscope model for a curved sinusoidal channel is also useful for complex machineries as it helps in their maintenance.
-
This mathematical analysis is a benchmark research for further advances in the field of endoscopy using a flexible peristaltic endoscope that has the same shape and structure as that of the channel in which it is placed.
-
A symmetric trapping phenomenon is observed through streamlines plot.
Abbreviations
- \(a\) :
-
Mean radius of curved tube
- \(R^{*}\) :
-
Radius of curved geometrical model
- \(\mu\) :
-
Dynamic viscosity
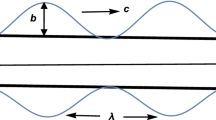
- \(b\) :
-
Amplitude of peristaltic wave
- \(\beta\) :
-
Wave number in dimensionless form
- \(\overline{R}_{1}\) :
-
Dimensional radius of inner tube
- \(r_{1}\) :
-
Dimensionless radius of inner tube
- \(\left( {\overline{U},\overline{W}} \right)\) :
-
Dimensional form of velocity field
- \(\left( {\overline{R},\overline{Z}} \right)\) :
-
Curvilinear coordinate system
- \(c\) :
-
Wave speed
- \(\lambda\) :
-
Wavelength
- \(s\) :
-
Curvature parameter
- \(\phi\) :
-
Amplitude ratio
- \(\overline{R}_{2}\) :
-
Dimensional radius of outer tube
- \(r_{2}\) :
-
Dimensionless radius of outer tube
- \(\left( {u,w} \right)\) :
-
Dimensionless form of velocity field
References
Mangan, E. V., Kingsley, D. A., Quinn, R. D., & Chiel, H. J. Development of a peristaltic endoscope. in Proceedings 2002 IEEE ICRA (Cat. No. 02CH37292) (Vol. 1, pp. 347–352). (2002).
Rachid, H. & Ouazzani, M. T. Mechanical efficiency of peristaltic pumping of a Newtonian fluid between two deformable coaxial tubes with different phases and amplitudes. Eur. Phys. J. Plus 130(6), 1–9 (2015).
Rachid, H. & Ouazzani, M. T. MHD peristaltic pumping of a Jeffrey fluid between two deformable coaxial tubes with different wavelengths. Int. J. Appl. Mech. 8(04), 1650056 (2016).
Rachid, H. & Ouazzani, M. T. Electro-magnetohydrodynamic peristaltic pumping of a biviscosity fluid between two coaxial deformable tubes through a porous medium. Acta Phys. Pol. B 48(9), 1515–1527 (2017).
Jaffrin, M. Y. & Shapiro, A. H. Peristaltic pumping. Annu. Rev. Fluid Mech. 3(1), 13–37 (1971).
Barton, C. & Raynor, S. Peristaltic flow in tubes. Bull. Math. Biophys. 30(4), 663–680 (1968).
Pozrikidis, C. A study of peristaltic flow. J. Fluid Mech. 180, 515–527 (1987).
Ali, N., Sajid, M., Javed, T. & Abbas, Z. Heat transfer analysis of peristaltic flow in a curved channel. Int. J. Heat Mass Transf 53(15–16), 3319–3325 (2010).
Ali, N., Sajid, M., Abbas, Z. & Javed, T. Non-Newtonian fluid flow induced by peristaltic waves in a curved channel. Eur. J. Mech. B Fluids 29(5), 387–394 (2010).
Ali, N., Sajid, M. & Hayat, T. Long wavelength flow analysis in a curved channel. Z. Naturforsch. A 65(3), 191–196 (2010).
Nadeem, S. & Maraj, E. N. The mathematical analysis for peristaltic flow of hyperbolic tangent fluid in a curved channel. Commun. Theor. Phys. 59(6), 729 (2013).
Nadeem, S. & Shahzadi, I. Mathematical analysis for peristaltic flow of two phase nanofluid in a curved channel. Commun. Theor. Phys. 64(5), 547 (2015).
Akbar, N. S. & Butt, A. W. Carbon nanotubes analysis for the peristaltic flow in curved channel with heat transfer. Appl. Math. Comput. 259, 231–241 (2015).
Sadaf, H. & Nadeem, S. Fluid flow analysis of cilia beating in a curved channel in the presence of magnetic field and heat transfer. Can. J. Phys. 98(2), 191–197 (2020).
Saleem, A. et al. Physical aspects of peristaltic flow of hybrid nano fluid inside a curved tube having ciliated wall. Results Phys. 19, 103431 (2020).
Akbar, N. S. & Nadeem, S. Endoscopic effects on peristaltic flow of a nanofluid. Commun. Theor. Phys. 56(4), 761 (2011).
Akbar, N. S. & Nadeem, S. Exact solution of peristaltic flow of biviscosity fluid in an endoscope: A note. Alex. Eng. J. 53(2), 449–454 (2014).
Saleem, S., Akhtar, S., Nadeem, S., Saleem, A., Ghalambaz, M. & Issakhov, A. Mathematical study of electroosmotically driven peristaltic flow of Casson fluid inside a tube having systematically contracting and relaxing sinusoidal heated walls. Chi. J. Phys. 71, 300–311 (2021).
Akram, J. & Akbar, N. S. Biological analysis of Carreau nanofluid in an endoscope with variable viscosity. Phys. Scr. 95(5), 055201 (2020).
Ahmed, N., Khan, U. & Mohyud-Din, S. T. Hidden phenomena of MHD on 3D squeezed flow of radiative-H 2 O suspended by aluminum alloys nanoparticles. Eur. Phys. J. Plus. 135(11), 1–17 (2020).
Khan, U., Ahmed, N., & Mohyud-Din, S. T. Surface thermal investigation in water functionalized Al 2 O 3 and γAl 2 O 3 nanomaterials-based nanofluid over a sensor surface. Appl. Nanosci. 1–11. (2020).
Ahmed, N., Khan, U. & Mohyud-Din, S. T. Modified heat transfer flow model for SWCNTs-H2O and MWCNTs-H2O over a curved stretchable semi infinite region with thermal jump and velocity slip: A numerical simulation. Phys. A Stat. Mech. Appl. 545, 123431 (2020).
Saba, F., Ahmed, N., Khan, U. & Mohyud-Din, S. T. Impact of an effective Prandtl number model and across mass transport phenomenon on the γAI2O3 nanofluid flow inside a channel. Phys. A Stat. Mech. Appl. 526, 121083 (2019).
Acknowledgements
The authors extend their appreciation to the Deanship of Scientific Research at King Khalid University for funding this work through research groups program under Grant No. RGP.1/46/42.
Author information
Authors and Affiliations
Contributions
L.B.M. has his part in conceptualization, writing draft and funding. S.A.: Calculations and results, Software, writing the draft. S.N.: Supervision, conceptualization, funding. S.S. has his role in writing the revision part, review original draft. A.I. has played his role in writing draft, review of manuscript.
Corresponding author
Ethics declarations
Competing interests
The authors declare no competing interests.
Additional information
Publisher's note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
Open Access This article is licensed under a Creative Commons Attribution 4.0 International License, which permits use, sharing, adaptation, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons licence, and indicate if changes were made. The images or other third party material in this article are included in the article's Creative Commons licence, unless indicated otherwise in a credit line to the material. If material is not included in the article's Creative Commons licence and your intended use is not permitted by statutory regulation or exceeds the permitted use, you will need to obtain permission directly from the copyright holder. To view a copy of this licence, visit http://creativecommons.org/licenses/by/4.0/.
About this article

Cite this article
McCash, L.B., Akhtar, S., Nadeem, S. et al. Viscous flow between two sinusoidally deforming curved concentric tubes: advances in endoscopy. Sci Rep 11, 15124 (2021). https://doi.org/10.1038/s41598-021-94682-8
Received:
Accepted:
Published:
Version of record:
DOI: https://doi.org/10.1038/s41598-021-94682-8
This article is cited by
-
Entropy analysis for a novel peristaltic flow in a curved heated endoscope: an application of applied sciences
Scientific Reports (2023)
-
Study of Non-Newtonian biomagnetic blood flow in a stenosed bifurcated artery having elastic walls
Scientific Reports (2021)
-
Finite element simulations of hybrid nano-Carreau Yasuda fluid with hall and ion slip forces over rotating heated porous cone
Scientific Reports (2021)
