
Abstract
The main purpose of this article is to investigate the qualitative behavior and traveling wave solutions of the fractional stochastic Kraenkel–Manna–Merle equations, which is commonly used to simulate the zero conductivity nonlinear propagation behavior of short waves in saturated ferromagnetic materials. Firstly, fractional stochastic Kraenkel–Manna–Merle equations are transformed into ordinary differential equations by using the traveling wave transformation. Secondly, the phase portraits, sensitivity analysis, and Poincaré sections of the two-dimensional dynamic system and its perturbation system of ordinary differential equations are drawn. Finally, the traveling wave solutions of fractional stochastic Kraenkel–Manna–Merle equations are obtained based on the analysis theory of planar dynamical system. Moreover, the obtained three-dimensional graphs of random solutions, two-dimensional graphs of random solutions, and three-dimensional graphs of deterministic solutions are drawn.
Similar content being viewed by others

Introduction
In recent years, fractional stochastic partial differential equations1,2,3 have been commonly used to simulate nonlinear problems affected by random factors in fields of physics, chemistry, biology, and engineering technology. Especially in the modeling process of complex system4,5,6, the influence of random factor is inevitable. Because considering random factor is more in line with the actual situation in these natural science fields. In recent years, many stochastic fractional order partial differential equations have been studied. For example, fractional stochastic Schrödinger equations7, stochastic fractional fokas system8, stochastic fractional Hirota–Maccari system9, fractional stochastic Broer–Kaup equations10, stochastic fractional RKL equation11, fractional stochastic potential Yu–Toda–Sasa–Fukuyama equation12, fractional-stochastic quantum Zakharov–Kuznetsov equation13, stochastic-fractional Drinfel’d–Sokolov–Wilson equations14, etc. In the study of the above equations, the most important task is to construct accurate traveling wave solutions15,16,17,18,19,20,21,22,23,24,25,26,27,28,29, and many effective methods have been proposed to construct traveling wave solutions for fractional stochastic partial differential equations.
In this study, the fractional stochastic Kraenkel–Manna–Merle equations are presented as follows30
where the magnetization and the external magnetic field related to the ferrite are represented by \(\varphi =\varphi (t,x)\) and \(\psi =\psi (t,x)\), respectively. \(\mathfrak {D}_{x}^{\alpha }\) stands for the conformable fractional derivative. \(\kappa \) is the coefficient of the damping. \(\sigma \) represents the noise intensity. \(\mathfrak {B}\) stands for the Brownian motion, and \(\mathfrak {B}_{t}=\frac{\partial \mathfrak {B}}{\partial t}\). In30, Wael W. Mohammed et al. constructed the traveling wave solution of Eq. (1.1) by the Mapping method. The main purpose of this article is to study the phase diagram and traveling wave solutions of Eq. (1.1) by the theory of dynamical systems. At the same time, by adding small perturbations to the two-dimensional dynamical system, its chaotic behavior, sensitivity, and Poincaré sections are considered.
The remaining sections in this article are arranged as follows: In Sect. 2, the phase portraits of the dynamical system and its perturbed system are discussed. In Sect. 3, the solutions of Eq. (1.1) are constructed by the method of analyzing planar dynamical systems. Finally, a brief conclusion is given.
Bifurcation and chaotic behaviors
Preliminary
Definition 2.1
31 For \(\alpha \in (0,1]\), the conformable fractional derivative of \(f:\mathbb {R}^{+}\rightarrow \mathbb {R}\) is defined as
Definition 2.2
32 The Brownian motion \(\{\mathfrak {B}(t)\}_{t\ge 0}\) is a stochastic process and satisfies:
-
(i)
\(\mathfrak {B}(0)=0\);
-
(ii)
\(\mathfrak {B}(t)\) is continuous for \(t\ge 0\);
-
(iii)
\(\mathfrak {B}(t_{2})-\mathfrak {B}(t_{1})\) is independent for \(t_{2}>t_{1}\);
-
(iv)
\(\mathfrak {B}(t_{2})-\mathfrak {B}(t_{1})\) has a normal distribution \(N(0,t_{2}-t_{1})\).
Lemma 2.3
33 \(\mathbb {E}(e^{\rho \mathfrak {B}(t)})=e^{\frac{1}{2}\rho ^{2}t}\) for \(\rho \ge 0\), where \(\mathbb {E}\) represents mathematical expectation.
Mathematical derivation
When \(\kappa =0\), the wave transformation is considered
here \(\Phi (\xi )\) and \(\Psi (\xi )\) are real functions. \(k_{1}\) and \(k_{2}\) stand for nonzero constants.
Inserting Eq. (2.1) into Eq. (1.1), we have
By taking the expected values on both sides of Eq. (2.2) and using Lemma 2.3, it can be concluded that
Integrating both sides of the second equation of Eq. (2.3) simultaneously yields
where \(c_{0}\) is the integration constant.
Inserting Eq. (2.4) into the first equation of Eq. (2.3) yields
where \(\varpi _{1}=\frac{1}{2k_{2}^{2}}\) and \(\varpi _{2}=\frac{c_{0}}{k_{2}^{2}}\).
Phase portraits
The two-dimensional dynamics of system (2.5) are described as follows
with Hamiltonian function
where h is the Hamiltonian constant.
Assume that the root of \(F(\Phi _{j})=0\) (\(j=0,1,2\)) is the abscissa of the equilibrium point, where \(F(\Phi _{j})=\varpi _{1}\Phi _{j}^{3}+\varpi _{2}\Phi _{j}\). Suppose that \(\textbf{M}(\Phi _{j},0)=\left( \begin{matrix} 0 &{} 1\\ 3\varpi _{1}\Phi _{j}^{2}+\varpi _{2}&{} 0 \end{matrix}\right) \) is the coefficient matrix of (2.6) at the equilibrium point. Then, we obtain
Remark 2.4
When \(\varpi _{1}>0\) and \(\varpi _{2}>0\), the system (2.6) has one equilibrium point (0, 0), which is a saddle point as shown in Fig. 1a. When \(\varpi _{1}>0\) and \(\varpi _{2}<0\), the system (2.6) has three equilibrium point (0, 0), \((\sqrt{-\frac{\varpi _{2}}{\varpi _{1}}},0)\), \((-\sqrt{-\frac{\varpi _{2}}{\varpi _{1}}},0)\), (0, 0) is the center point as shown in Fig. 1b. \((\sqrt{-\frac{\varpi _{2}}{\varpi _{1}}},0)\) and \((-\sqrt{-\frac{\varpi _{2}}{\varpi _{1}}},0)\) are the saddle points by using Maple 2022 mathematical software as shown in Fig. 1b.

2D phase portrait of system (2.6).
Chaotic behaviors
Therefore, system (2.6) can be transformed into the following two-dimensional disturbance system with perturbation term
where \(f(\xi )=A\cos (k\xi )\) and \(f(\xi )=Ae^{-0.05\xi }\) are the perturbed term. A represent the amplitude of system (2.9). k stands for the frequency of system (2.9).
Remark 2.5
Here, we have used the Maple 2022 mathematical software to draw two-dimensional diagrams, three-dimensional diagrams, sensitivity analysis, and Paincaré section of the disturbance system (2.9) (see Figs. 2 and 3). The disturbance systems we are considering are periodic disturbances and small disturbance systems. At the same time, we also considered the 2D phase diagram, 3D phase diagram, and sensitivity analysis of the disturbance system (2.9) under different initial values.

The chaotic behaviors of system (2.9) with \(\varpi _{1}=2,\varpi _{2}=-6,A=2.9,k=1\).

The chaotic behaviors of system (2.9) with \(\varpi _{1}=2,\varpi _{2}=-6,A=2.9\).
Traveling wave solution of Eq. (1.1)
Firstly, we make some assumptions \(h_{0}=H(0,0)=0\), \(h_{1}=H(\pm \sqrt{-\frac{\varpi _{1}}{\varpi _{2}}},0)=\frac{\varpi _{2}^{2}}{4\varpi _{1}}\).
\(\varpi _{1}>0\), \(\varpi _{2}<0\), \(0<h<\frac{\varpi _{2}^{2}}{4\varpi _{1}}\)
Then system (2.6) becomes
where \(\kappa _{1h}^{2}=\frac{-\varpi _{2}+\sqrt{\varpi _{2}^{2}-4\varpi _{1}h}}{\varpi _{1}}\) and \(\kappa _{2h}^{2}=\frac{-\varpi _{2}-\sqrt{\varpi _{2}^{2}-4\varpi _{1}h}}{\varpi _{1}}\).
Substituting (3.1) into \(\frac{d\Phi }{d\xi }=z\) and integrating it, we can present the following integral equation
From Eq. (3.2), the Jacobian function solutions can be presented
\(\varpi _{1}>0\), \(\varpi _{2}<0\), \(h=\frac{\varpi _{2}^{2}}{4\varpi _{1}}\)
Then, we obtain \(\kappa _{1h}^{2}=\kappa _{2h}^{2}=-\frac{\varpi _{2}}{\varpi _{1}}\). Similar to situation 3.1, we can obtain through integration
Remark 3.1
Through the transformation (2.1) and relationship (2.4), we can easily obtain another solution \(\psi _{1}(t,x)\) and \(\psi _{2}(t,x)\) to Eq. (1.1) by using Eqs. (3.3) and (3.4).
Numerical simulations
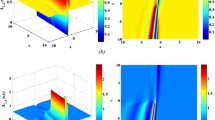
In this section, we plotted the solutions \(\psi _{1}(t,x)\) and \(\psi _{2}(t,x)\) including three-dimensional random graphs, two-dimensional random graphs, and three-dimensional deterministic graphs by setting different parameters and Maple 2022 mathematical software as shown in Figs. 4 and 5. \(\psi _{1}(t,x)\) is a Jacobian function solution. \(\psi _{2}(t,x)\) is a bell shaped solitary wave solution.

The solution \(\varphi _{1}(t,x)\) with \(k_{1}=\frac{\sqrt{2}}{2},k_{2}=\frac{\sqrt{2}}{2},c_{0}=-1,\varpi _{1}=1,\varpi _{2}=-2,\sigma =\frac{1}{2},\alpha =\frac{1}{2},h=\frac{1}{2}\).

The solution \(\varphi _{2}(t,x)\) with \(k_{1}=\frac{\sqrt{2}}{2},k_{2}=\frac{\sqrt{2}}{2},c_{0}=-1,\varpi _{1}=1,\varpi _{2}=-2,\sigma =\frac{1}{2},\alpha =\frac{1}{2},h=1\).
Conclusion
This article uses the theory of dynamical systems to study the traveling wave solutions and qualitative behavior of Eq. (1.1). Compared with reference30, this article not only obtained the traveling wave solution of Eq. (1.1), but also analysed the chaotic behavior, sensitivity analysis, and Poincaré sections by adding small perturbations. In this article, we consider two different forms of disturbance systems. On the one hand, we consider periodic perturbation system. On the other hand, we also considered the dynamic behavior of small periodic disturbances. In order to facilitate readers’ understanding of the solution of Eq. (1.1), we have drawn three-dimensional and two-dimensional graphs of the solutions \(\psi _{1}(t,x)\) and \(\psi _{2}(t,x)\), as well as three-dimensional graphs without considering the influence of random factors. In future research, our focus will be on the study of traveling wave solutions and dynamic behavior of more complex fractional order stochastic partial differential equations.
Data availability
The datasets used and/or analyzed during the current study available from the corresponding author on reasonable request.
References
Mohammed, W. W. et al. The optical solutions of the stochastic fractional Kundu–Mukherjee–Naskar model by two different methods. Mathematics 10, 1465 (2022).
Liu, C. & Li, Z. The dynamical behavior analysis and the traveling wave solutions of the stochastic Sasa–Satsuma equation. Qual. Theory Dyn. Syst. 23, 157 (2024).
Mohammed, W. W. et al. Brownian motion effects on the stabilization of stochastic solutions to fractional diffusion equations with polynomials. Mathematics 10, 1458 (2022).
Jie, W. & Yang, Z. Global existence and boundedness of chemotaxis-fluid equations to the coupled Solow–Swan model. AIMS Math. 8, 17914–17942 (2023).
Tang, C., Li, X. & Wang, Q. Mean-field stochastic linear quadratic optimal control for jump-diffusion systems with hybrid disturbances. Symmetry 16, 642 (2024).
Jie, W. & Huang, Y. Boundedness of solutions for an attraction-repulsion model with indirect signal production. Mathematics 12, 1143 (2024).
Shi, D., Li, Z. & Han, T. New traveling solutions, phase portrait and chaotic pattern for the generalized (2+1)-dimensional nonlinear conformable fractional stochastic Schrödinger equations forced by multiplicative Brownian motion. Results Phys. 52, 106837 (2023).
Mohammed, W. W. et al. Abundant optical soliton solutions for the stochastic fractional Fokas system using bifurcation analysis. Phys. Scr. 99, 045233 (2024).
Han, T. & Zhao, L. Bifurcation, sensitivity analysis and exact traveling wave solutions for the stochastic fractional Hirota–Maccari system. Results Phys. 47, 106349 (2023).
Alshammari, S. et al. The analytical solutions for the stochastic-fractional Broer–Kaup equations. Math. Probl. Eng. 2022, 6895875 (2022).
Al-Askar, F. M. & Mohammed, W. W. The analytical solutions of the stochastic fractional RKL equation via Jacobi elliptic function method. Adv. Math. Phys. 2022, 1534067 (2022).
Albosaily, S. et al. The analytical stochastic solutions for the stochastic potential Yu–Toda–Sasa–Fukuyama equation with conformable derivative using different methods. Fract. Fract. 7, 787 (2023).
Mohammed, W. W. et al. Solitary wave solutions of the fractional-stochastic quantum Zakharov–Kuznetsov equation arises in quantum magneto plasma. Mathematics 11, 488 (2023).
Han, T. et al. Chaotic behavior and solitary wave solutions of stochastic-fractional Drinfel’d–Sokolov–Wilson equations with Brownian motion. Results Phys. 51, 106657 (2023).
Li, Z. & Peng, C. Bifurcation, phase portrait and traveling wave solution of time-fractional thin-film ferroelectric material equation with beta fractional derivative. Phys. Lett. A 484, 129080 (2023).
Musong, G., Peng, C. & Li, Z. Traveling wave solution of (3+1)-dimensional negative-order KdV–Calogero–Bogoyavlenskii–Schiff equation. AIMS Math. 9, 6699–6708 (2024).
Cevikel, A. C. Traveling wave solutions of conformable Duffing model in shallow water waves. Int. J. Mod. Phys. B 36, 2250164 (2022).
Li, Z. & Liu, C. Chaotic pattern and traveling wave solution of the perturbed stochastic nonlinear Schrödinger equation with generalized anti-cubic law nonlinearity and spatio-temporal dispersion. Results Phys. 56, 107305 (2024).
Cevikel, A. C. & Bekir, A. Assorted hyperbolic and trigonometric function solutions of fractional equations with conformable derivative in shallow water. Int. J. Mod. Phys. B 37, 2350084 (2023).
Cevikel, A. C. Optical solutions for the (3+1)-dimensional YTSF equation. Opt. Quantum Electron. 55, 510 (2023).
Li, Z. & Hussain, E. Qualitative analysis and optical solitons for the (1+1)-dimensional Biswas–Milovic equation with parabolic law and nonlocal nonlinearity. Results Phys. 56, 107304 (2024).
Cevikel, A. C., Bekir, A. & Guner, O. Exploration of new solitons solutions for the Fitzhugh–Nagumo-type equations with conformable derivatives. Int. J. Mod. Phys. B 37, 2350224 (2023).
Bekir, A. & Cevikel, A. C. New solitons and periodic solutions for nonlinear physical models in mathematical physics. Nonlinear Anal. Real World Appl. 11, 3275–3285 (2010).
Li, Y., Sun, W. & Kai, Y. Chaotic behaviors, exotic solitons and exact solutions of a nonlinear Schrödinger-type equation. Optik 285, 170963 (2023).
Li, Y. et al. Exact solutions and dynamic properties of a nonlinear fourth-order time-fractional partial differential equation. Waves Random Complex Media 204, 4541. https://doi.org/10.1080/17455030.2022.2044541 (2021).
Liu, C. Classification of all single travelling wave solutions to Calogero–Degasperis–Focas equation. Commun. Theor. Phys. 48, 601 (2007).
Kai, Y., Ji, J. & Yin, Z. Study of the generalization of regularized long-wave equation. Nonlinear Dyn. 107, 2745–2752 (2022).
Kai, Y. & Li, Y. A study of Kudryashov equation and its chaotic behaviors. Waves Rand. Complex Media 217, 2231. https://doi.org/10.1080/17455030.2023.2172231 (2022).
He, Y. & Kai, Y. Wave structures, modulation instability analysis and chaotic behaviors to Kudryashov’s equation with third-order dispersion. Nonlinear Dyn.https://doi.org/10.1007/s11071-024-09635-3 (2024).
Mohammed, W. W. et al. Soliton solutions of fractional stochastic Kraenkel–Manna–Merle equations in ferromagnetic materials. Fractal Fract. 7, 328 (2023).
Khalil, R. et al. A new definition of fractional derivative. J. Comput. Appl. Math. 264, 65–70 (2014).
Hamza, A. E. et al. Fractional-stochastic shallow water equations and its analytical solutions. Results Phys. 53, 106953 (2023).
Calin, O. An Informal Introduction to Stochastic Calculus with Applications (World Scientific, 2015).
Author information
Authors and Affiliations
Contributions
All authors reviewed the manuscript.
Corresponding author
Ethics declarations
Competing Interests
The author declares no competing interests.
Additional information
Publisher's note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
Open Access This article is licensed under a Creative Commons Attribution 4.0 International License, which permits use, sharing, adaptation, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons licence, and indicate if changes were made. The images or other third party material in this article are included in the article’s Creative Commons licence, unless indicated otherwise in a credit line to the material. If material is not included in the article’s Creative Commons licence and your intended use is not permitted by statutory regulation or exceeds the permitted use, you will need to obtain permission directly from the copyright holder. To view a copy of this licence, visit http://creativecommons.org/licenses/by/4.0/.
About this article

Cite this article
Luo, J. Traveling wave solution and qualitative behavior of fractional stochastic Kraenkel–Manna–Merle equation in ferromagnetic materials. Sci Rep 14, 12990 (2024). https://doi.org/10.1038/s41598-024-63714-4
Received:
Accepted:
Published:
DOI: https://doi.org/10.1038/s41598-024-63714-4
Keywords
This article is cited by
-
Fractional-order computational modeling of pediculosis disease dynamics with predictor–corrector approach
Scientific Reports (2025)
-
Exploration of Different Soliton Solutions for the Stochastic Davey–Stewartson Model Under the Influence of Noise
Archives of Computational Methods in Engineering (2025)
-
High performance computational approach to study model describing reversible two-step enzymatic reaction with time fractional derivative
Scientific Reports (2024)
