
Abstract
In this work, a new kind of charge scheduling algorithm is proposed by utilizing the War Strategy Optimization (WSO) algorithm. The strategies used in the war such as attack, defense, assigning soldiers to take positions are the inspiration to this algorithm. The proposed WSO algorithm is validated in a constructed geographic area which consists of Six starting/destination points, sixteen nodes, and twelve charging stations. In terms of waiting time and charging cost, the experimental results show that the WSO method much improves over current methods. The average waiting time and average charging cost of EVs are validated in MATLAB, with different considerations such as different number of EVs varied from 25 to 100, and different number of charging piles varied from 1 to 4. The WSO algorithm specifically lowered charging costs by up to 13.67% compared to the same and waiting time by up to 83.25% relative to the First Come First Serve algorithm. Comparatively to the Chaotic Harris Hawk Optimization and Harris Hawk Optimization algorithms, the WSO method demonstrated declines in waiting time by 11.17% and 39.09%, respectively, and declines in charging costs by 3.61% and 12.45%, respectively. Especially in situations with limited charging infrastructure, these findings show that the WSO algorithm may improve the efficiency and cost-effectiveness of EV charging management systems. For real-world EV charging management systems, the method's capacity to efficiently allocate EVs among charging stations, lower waiting times, and lower charging costs makes it a potential solution.
Similar content being viewed by others


Introduction
Greenhouse gas emissions are being reduced by electric vehicles (EVs). Recent laws in developed nations promote electric vehicles and reduce emissions for sustainable mobility1. Urban areas have high combustion vehicle CO2 emissions. EVs are best, but they emit CO2 without renewable power. Smart grids encourage distributed renewable energy. Renewable charging stations are best now. In 2018, the world had 5.1 million electric cars (EVs), and the International Energy Agency predicts 250 million by 20302. By 2016, when 750,000 electric cars were sold worldwide, the Electric Vehicles Initiative aims to reach 30% market share for EVs in commercial vehicles, trucks, and passenger cars. The number of EV purchases should rise. As EVs gain popularity, range and battery capacity limit their efficiency and feasibility. Lack of charging infrastructure hurts EV sales. Time, geographical uncertainty, and insufficient electricity for efficient charging are power system "problems". Government and industry install charging stations (CS) for the public like gas stations to reduce these impacts. These are used in cities, highways, and densely populated areas like shopping malls, theaters, beaches, and more to charge vehicles while parking, saving time and money3. When charging stations are plentiful, the vehicle must choose a CS. The CS can separate into fast and slow charging stations. Along with this, the CS may be crowded, increasing vehicle charging time4. Even at fast charging, the vehicle must be plugged in for 30 min, which increases peak-hour queues. This will increase waiting and charging times and cause electric grid instability like voltage fluctuation, higher harmonics, grid unbalance, etc. VANET architecture communicates with all EVs in an environment to address these issues. This VANET system provides vehicle data like live location, SoC, average speed, and nearby charging stations. When the vehicle needs charging, this network suggests nearby charging stations with details like slow or fast charging, number of charging piles, distance to CS, nearby CS, etc.5,6.
This system provides the optimum solution for the EVs to select an optimum path and suitable charging station7. Researchers developed several optimization algorithms to improve VANET charge scheduling. VANET uses a Novel Hybrid Multi Population Algorithm to address these issues. Along with this, the artificial ecosystem-based optimization algorithm is feud for improving/finetuning system performance. Harris Hawk Optimization is integrated to improve performance even more than other algorithms8. Later, a hybrid optimization algorithm was developed by combining tree seed and atom search algorithms. The tree seed algorithm finds the optimizing path, while the atom search algorithm efficiently fine-tunes the path and CS allocation9Chaos theory is integrated into this hybrid approach, reducing operation costs. In all 83 benchmarked functions, this method outperforms the results. These algorithms minimize electric grid operating costs, battery health, charge scheduling, optimal path selection, etc. Besides these methods, many algorithms have been developed to schedule charges in nearby CS with less waiting time10,11. The charging station model and dynamic CS pricing were modeled to optimize the problems. Charging station prices are fixed and vary based on comfort, power demand, grid peak operating time, etc.12,13. Traffic and vehicle location also affect charge scheduling and cost14. Scheduling takes power grid stability and operating points into account to direct users to the right charging station15,where the smart vehicle model and CS model are modeled to validate charge management. A model with the CS model, vehicle model, charging piles model, traffic conditions, grid conditions, and fast-charging consideration has been built to reduce charging time16. Developed charging management systems (EMS) for electric vehicles enable pre-empted charging3. The EMS must be charged to charge and band electric vehicles. EMS improvements improved billing and communication. Lack of opportunistic vehicle communication causes system inefficiency and slowness. Low-energy electric vehicles were used for travel planning and charge warning17, so electric vehicle passengers may benefit from this strategy. The strategy ignores additional energy issues, which is a drawback. Another charge management and CS selection system for energy-intensive electric vehicles has been developed18. The CS selection method used traffic lights, route mileage, and road speed to estimate electric car travel time. No consolidation occurred in electric vehicle charging station management. An algorithm-based distributed platform for charging electric cars19.
Plugged-in EVs for V2G services increased power and reduced power loss. Success was measured by incremental cost. A shared and electric bike selection system was created20. This method initially improved electric vehicle charging21. Drivers found charging and transferring battery life easier this way. It is also planned to operate many electric vehicles2, by solving hierarchical mixed-variable optimization problems with CS selection. Compared to analytical methods, the procedure solved problems faster. This method considered the electric car charging point (ECP) site's size and location to find the best one22. With a realistic model and optimal site model for electric car charging models, significant concerns and scheduling requirements were investigated23. This model was based on charge queuing and constant queue length. The method improved battery charging and position sensing. This decision banned car-sharing. One hundred forty people built a forward–backward computational graph MCDODE model24. Tree-based cumulative curves help them build multi-class DAR matrices. The form works for small, medium, and large networks. Conventional vehicle charging schedules have some drawbacks25,26: For charging, Spark-based route planning and electric car charging systems were developed4. This technique, which favored later-scheduled vehicles, caused serious issues. We must wait in line because of this issue. Safety is another issue. Electric vehicle messaging is safe with EMMS. This scenario protects sensitive data from unauthorized access with integrity, confidentiality, and privacy services. The teaching learning-based optimization (TLBO) JAYA system was created to select and optimize intrusion detection system parameters. SVM, C, and gamma were changed due to the enhanced JAYA statistical technique27. Safety is prioritized in electric vehicle charging systems. Recently, some JAYA metaheuristics have been optimized. JAYA does not require parameter changes, unlike other optimization strategies. A large plug-in electric car was controlled by a group using consensus. Sharing massive amounts of data could cause data security issues, so cybersecurity must be strengthened. Additionally, the data may be redundant. Since all EVs communicate, cloud databases can store the final data. Mining depends on predicted large amounts of data. As data quantity increases, Naïve Bayes Grid parameters become more precise. Fuzzy Generalized Hebbian Algorithm is a revolutionary data reduction method that can solve this problem. This technology eliminates redundant IDS data28. Computation error reduction can improve a decision support model's electric vehicle charging location prediction. The computation and refinement of the solution, which offers massive optimal ECPs to meet customer needs, takes longer than expected. The mixed variable differential evolution approach makes performance improvement difficult to measure. The MVDE makes the fewest concessions possible to improve other measures through scheduled EV coordination.A large-scale statistical analysis of EVs’ access to dispersed has been done29. Few works present connected mobility (CM), a communication concept for vehicles, roadside base stations, passengers, traffic signals, and the power grid30,31. The car communicates via V2I, V2V, V2C, V2P, and V2X. V2X links car networks and infrastructure. VANET monitors traffic and road congestion with a multiagent system that links cars, communication channels, and roadside base stations32. To simplify charge scheduling, a Chaotic Harris Hawk Optimization algorithm was developed33. Table 1 provides the summary of different algorithms for the charge scheduling problem.
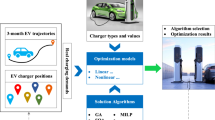
The War Strategy Optimization (WSO) method has been utilized in the development of a novel charge scheduling algorithm, which has been proposed in this work. owing to the fact that the war is entirely predicated on tactical decisions in a complicated environment, which necessitates immediate actions in response to changes in the environment. The kings and commanders are currently deliberating over whether they should employ an offensive or defensive strategy. Additionally, they attempted to check the health of each army and its soldiers at each stage, and when it was necessary, they provided replacements for the soldiers in each army. The behavior in concern can be utilized to solve a wide variety of real-time problems, such as charge scheduling. The objective function of the charge scheduling algorithm and its constraints have been framed with the help of the WSO algorithm so that it can be used. Each of the electric vehicles (EVs) is a soldier, and in order to get charge of the objective function, each EV is attempting to follow either an attack or defense strategy. Figure 1 depicts the functional hierarchy of the work that is being proposed.

Pictorial representation of the charge scheduling procedure using WSO algorithm.
The structure of the manuscript is as follows: the WSO algorithm is discussed in Section "War strategy optimization (WSO) algorithm", and the charge scheduling method derived from the WSO algorithm is presented with a step-by-step formulation in Section "War strategy optimization (WSO) algorithm", respectively. Using the WSO method, the necessary expression for the charge scheduling process has been defined with a fitness function, and the relevant constraints have been constructed and addressed in Section "WSO based charge scheduling algorithm". In Section "Experimental analysis", both the construction of the geographic region and the validation of the WSO method for the charge scheduling have been completed and the work has been concluded in Section “Conclusion”.
War strategy optimization (WSO) algorithm
The War Strategy Optimization (WSO) algorithm, as proposed in34 is a metaheuristic optimization algorithm inspired by ancient war strategies. This algorithm is used in the mathematical model for electric vehicle (EV) charge scheduling to solve the problems of effective EV charging in metropolitan environments. Focusing on four fundamental parameters like total travel time, total waiting time, total charging cost, and grid stability, the model is developed as a multi-objective optimization problem. Three main limitations like charging station capacity constraint, EV battery constraint, and time window constraint are included into the model. Inspired by military strategy, the WSO algorithm allows effective exploration of the solution space considering both individual EV needs and system-wide optimization. The model's strength is in its all-encompassing approach that addresses power grid stability, user convenience, and economic concerns. Its adaptability makes it a strong instrument for long-term planning and optimization of EV charging networks in smart cities since it lets simple integration of extra constraints or goals possible. This model marks a breakthrough in EV charge scheduling, so facilitating the acceptance of EVs and helping to support the change to sustainable urban transportation systems. The objective function and constraints for a problem optimized using the WSO algorithm would depend on the specific application or problem being addressed. The general formulation of WSO is as follows:
Objective Function:
Subject to Constraints as in Eqs. (2) and (3)
where:
-
\(f\left( x \right)\) is the objective function specific to the problem being optimized (e.g., cost, distance, energy consumption).
-
\(x = (x_{1} ,x_{2} , \ldots ,x_{n} )\) is the vector of decision variables.
-
\(g_{i} \left( x \right)\) are inequality constraints that must be satisfied by the solution.
-
\(h_{j} \left( x \right)\) are equality constraints that must be satisfied by the solution.
-
m is the number of inequality constraints.
-
p is the number of equality constraints.
The WSO algorithm would then be used to find the values of the decision variables (x) that optimize the objective function while satisfying all the constraints. The algorithm uses concepts from ancient war strategies, such as attack and defence strategies, to explore the solution space and converge to an optimal solution and the algorithm has been represented in Fig. 2. The position of King, Commander and their decides the moment of soldier. After the successful moment of soldiers, the commander relies on his strategy or reframe the strategy to achieve the target. The.

War strategy optimization model.
Various parameters of WSA algorithm
Soldier size (S)
The number of search agents are considered as the number of soldiers in this algorithm as per the expression (4)
Dimension of the war space (dimension of the problem)
The number of decision variables used in the search space has been considered as the dimension of war space as in expression (5)
Lower and upper bounds of the search space
The decision variable are bounded between the upper bound to lower bound which may vary with respect to the moment in war space as expressed in Eqs. (6) and (7)
Positions of the king (K) and army commander (C)
In the war space (search space) the King and commander are selected based on the best and second best solutions among the position and movement of each soldiers and it can be expressed as Eqs. (8) and (9).
Attack forces of the king and the army commander
The attacking force of the King and the commander can be expressed with the fitness values of them in the search space as express in Eqs. (10) and (11).
These values are varied with respect to the movement and iteration count. In each iteration the forces of kind and commander may varied with respect to the movement of soldiers.
Max-iterations
The maximum number of iterations is a crucial parameter for tuning the accuracy and effectiveness of the algorithm and it can be expressed as Eq. (12)
ρr (rho)
Rho is a control parameter which is lies between 0 to 1 for opting the soldier movement to follow either the attack strategy or the defence strategy.
Rank (R) and weight (W) of each soldier
These two parameters are updated with respect to each iteration, fitness values and the movement of each soldier. Based on the soldier’s success on their attack/defence strategy and the improvements of their positions in the search space. Based on these the rank and weight of each soldier has been defined at the end of iteration. The rank and weight of each soldier can be defined using the Eqs. (13) and (14) These parameters are dynamically updated based on the soldier's success in improving its position. The rank reflects how close a soldier is to the target, and the weight influences the step size of the soldier's movement.
where \((\alpha )\) is a constant that controls the nonlinearity of the weight update.
Weak soldier replacement/relocation strategy
This parameter replaces or relocates each soldier based on the fitness value and its rank, weight. This update on the end of each iteration improves the efficiency of current fitness and the next iteration. The replacement lies between the upper bound and lower bound and it can be expressed as Eqs. (15) and (16).
where \(X_{w} (t)\) is the position of the weak soldier at iteration (t), rand and randn are random numbers, and median is the median position of all soldiers. These are the parameters considered in WSO algorithm for properly tuning and improving the performance of its efficiency for any kind of described problems.
Implementation of charge scheduling algorithm from WSO algorithm
The WSO algorithm can be integrated to the charge scheduling problem by defining the objectives. There are few considerations for incorporating charge scheduling using WSO is by defining objectives, and its constraints as follows:
Objective function
Minimization of total trave time
The "attack strategy" of WSO dynamically moves soldiers (electric vehicles) to the destination while taking into consideration the amount of time required for charging. This helps to reduce the total amount of time that is spent traveling.
Minimization of waiting time
Soldiers, which are electric vehicles, are strategically positioned in order to avoid congestion and reduce the amount of time spent waiting at charging stations. This is accomplished through the "defense strategy" of WSO.
Minimization of cost for charging
It is possible to reduce charging costs by incorporating it into the fitness value of each WSO soldier (EV). This would enable charging costs to be reduced.
Maximization of grid stability
In order to prevent the power grid from becoming unstable as a result of charging schedules for electric vehicles, the WSO algorithm ought to be modified to include a grid constraint.
Constraints
-
When it comes to updating their positions in WSO, it is essential for soldiers (EVs) to take into account the capacity and availability of charging stations as battlefield constraints.
-
The ability to perform fitness evaluations and position updates is made possible by WSO's utilization of electric vehicle State of Charge (SoC) and charging rate limits.
Implementation of charge scheduling
-
The WSO soldiers are representing electric vehicles that have charging schedules in a war field.
-
There is a correlation between the positions of the soldiers and the beginning and duration of the charging process at stations.
-
When determining each charging schedule, fitness takes into account the amount of time spent traveling and waiting, as well as the cost of charging and the reliability of the grid.
-
With the assistance of WSO attack and defense strategies, electric vehicles are able to determine the charging schedule that is most suitable by taking into account all of their constraints and objectives.
By mapping the WSO algorithm to the charge scheduling problem, it is possible to optimize charging schedules for electric vehicles while taking into account multiple objectives and constraints. The algorithm's dynamic and strategic nature makes it possible to optimize the processes involved. It takes environmental data, user preferences, real-time data on availability of charging stations into account, and driver-specific information. The system changes with traffic flow and possible congestion at charging stations. Inspired by war strategies, it manages resources and responds to dynamic conditions using advanced calculations and strategic decision-making procedures. The system modulates current positions to improve efficiency and shows charging stations, charging requests, and vehicle locations. This advanced method shows the possibilities of intelligent, responsive systems in handling EV infrastructure needs.The functional flow diagram of the proposed WSO algorithm is shown in Fig. 3.

Functional flow diagram of the proposed WSO charge scheduling algorithm.
WSO based charge scheduling algorithm
The charges scheduling algorithm for EVs are derived from the WSO algorithm, where the objective is the minimization of total travel time, waiting time and charging cost. The flowchart of the proposed WSO algorithm has shown in Fig. 4. The objective function and the constraints of the charge scheduling using WSO algorithm is given as follows;

Flowchart of the proposed WSO algorithm for charge scheduling.
Objective function
The ultimate objective of the charge scheduling algorithm is to minimize the weighted sum of the total travel time, waiting time of EVs, charging cost, and to maximize the grid stability. The objective function (F) can be expressed as Eq. (17)
where \(T_{{{\text{total}}}} = \sum\limits_{i = 1}^{N} {T_{i} }\) is the total travel time for all (N) EVs, including charging time, \(W_{{{\text{total}}}} = \sum\limits_{i = 1}^{N} {W_{i} }\) is the total waiting time for all EVs at charging stations, \(C_{{{\text{total}}}} = \sum\limits_{i = 1}^{N} {C_{i} }\) is the total charging cost for all EVs, \(G_{stability} = \frac{1}{T}\sum\limits_{i = 1}^{N} {\left( {1 - \frac{{\sum\limits_{i = 1}^{N} {P_{charging,i} (t)} }}{{P_{grid,max} (t)}}} \right)}\) is the grid stability metric, \(w_{1} ,w_{2} ,w_{3} ,{\text{ and }}w_{4}\) are the weights for each component.
Constraints
Charging station capacity
where \(x_{ijt}\) is a binary variable indicating whether EV (i) is charging at station (j) at time (t).
EV battery constraints
where \({\text{SoC}}_{i} (t)\) is the state of charge of EV (i) at time (t), normalized between 0 and 1.
Time windows
where \(t_{i}^{{{\text{start}}}}\) and \(i \le t_{i}^{{{\text{end}}}}\) are the earliest and latest charging start times for EV(i).
The WSO algorithm is responsible for assigning a charging schedule spot to each soldier (EV), which includes the charging behaviors like time charging, charging duration and selected charging station. Fitness of the soldier is determined by the objective function. After that, the WSO algorithm determines the most effective charging schedules in order to minimize (F) and satisfy the constraints.
Pseudocode of the proposed algorithm
The pseudocode of the proposed WSO algorithm based charge scheduling is gives as follows;


Experimental analysis
The proposed WSO algorithm has been validated in a constructed geographic area in order to evaluate its effectiveness under a variety of different scenarios. This section has examined WSO algorithm and also compares with three different algorithms, each of which has been analyzed in the assumed geographic network. The geographical area has been constructed on the basis of the actual geographical characteristics of the location in Chennai. The traffic conditions and the populations of the roads are taken into consideration during the creation process; however, a small intersecting road and narrow paths have been neglected in this work. There are six distinct points, namely A, B, C, D, E, and F, that have been taken into consideration as the starting and destination points. In addition to the sixteen nodes that connect all of these points to one another, there are twelve charging stations that are available. There are sixteen different ways to travel from any one of the starting points to the destination point, and the nodes are the means by which the six starting and destination points are connected to one another. Using Dijkstra's algorithm, it is able to determine the path that was the shortest between the two points. Table 2 contains information regarding the number of charging stations, the number of nodes, and the details of the shortest path and the geographical region has been depicted in Fig. 5.

Pictorial representation of the designed geographic area.
Depending on the type of vehicle, the construction of the vehicle as well as the specifications of the motors, batteries, and other components are different. For the purposes of this work and analysis, the capacity of the battery has been assumed to be 100 kWh, and the Table 3 provides a detailed description of its specifications. When it comes to the procedures for scheduling electric vehicles, all electric vehicles are taken into consideration depending on how long it takes to travel from the starting point to the destination via the charging stations in the shortest path. It has been taken into consideration that the traffic situation at the location varies depending on the time of day. Every single vehicle possesses an adequate amount of power to reach the charging station. The charging stations operate properly and are free of any defects, which allows them to supply electric vehicles whenever it is required. The charging procedure is carried out in accordance with the principle of first come, first served in the conventional method. It is possible to charge the vehicle as soon as it arrives at the charging station when the charging piles are not occupied by other vehicles. However, when other vehicles are already charging and there are a few more vehicles waiting in queue, then this vehicle needs to wait in queue until the vehicles that have already been reached finish charging. When the number of people who use, vehicles is kept to a minimum, this method is effective in the environment. Nevertheless, this method is not effective in a densely populated area that has a greater number of people who use electric vehicles. As a result of the wait time, the overall charging time spent at the charging station will increase.
The distance between each starting point and destination is listed in Table 4, which contains the charging station distances. In order to train the proposed algorithm, the details of the shortest path as well as the distance between each charging station and each point are utilized. The algorithm is able to assign the vehicle to the charging station that requires the least amount of waiting time possible based on these data. One of the most important considerations in the process of allocating vehicles is the State of Charge (SoC). Using the SoC, the algorithm is able to make an estimate of the maximum distance that each vehicle is capable of traveling, and it is also able to locate charging stations that are accessible based on the starting point and the destination. This means that the algorithm does not have the ability to execute scheduling procedures if the vehicle can only access a single charging station with the available SoC. In spite of this, it assigns the vehicle to the charging station that it is able to access using the SoC that is available. The amount of time spent waiting might lengthen as a result of this. However, the algorithm may be able to assist the user in reducing the amount of time spent waiting by charging the user's device from a charging station that is easily accessible at an additional cost, while the user is traveling to their destination. This may shorten the amount of time that the user has to wait, but it will result in an increase in the cost function.
The available charging stations in the shortest path has been obtained and fed to the algorithm for training. This always prefers the charging stations within this limit, whenever the vehicles raising the charging request. Simultaneously, there are numerous vehicles may rise the charging request. During this request, the algorithm collects the data like, starting point, destination point, available SoC, shortest path between two points, available charging stations in the shortest path. Based on these, the algorithm initializes the charge scheduling process. There are some charging stations which is mutually placed in the shortest path between two or more starting and destination points. This will increase the demand in that charging stations that directly increases the waiting time. It is one of the issues that can resolved using the proposed algorithm. As the property of opposition-based reinforcement learning, the proposed algorithm takes this scenario to as opposition and it learns to act effectively and efficiently to allocate the charging station with minimum waiting time. Also, it can shift the charging station recommendation in the shortest path to the next shortest path. For that it provides this option to the user when the user selects the second shortest path to get charged earlier and with less travel time. The mutually connected charging stations are given in Table 4 and the number of mutual connections with each other is shown in Fig. 5.
For the purpose of training, the algorithm has been provided with the information regarding the charging stations that are located along the shortest path. Whenever the vehicles make a request for charging, this always gives preference to the charging stations that are within this limit. Concurrently, there are a great number of vehicles that could potentially increase the charging request. While this request is being processed, the algorithm gathers information such as the starting point, the destination point, the available SoC, the shortest path between two points, and the charging stations that are available along the shortest path. When these are taken into consideration, the algorithm begins the process of charge scheduling. Some charging stations are strategically located in the shortest path between two or more starting and destination points. These stations are mutually placed in the shortest path. Because of this, there will be a greater demand for charging stations, which will significantly lengthen the amount total waiting time. This is one of the possible problems that can be solved by utilizing the algorithm that WSO algorithm. EVs are considered as the soldier in the war space (environment). With the available SoC, the algorithm make a schedule, when the schedule is not optimum, then it follows the attack strategy to improve the schedule, when the scheduling in the consequent iterations are worser than the previous one, then it follows the defense strategy for to improvise the schedule. Moreover, it has the capability to move the recommendation for the charging station that is located on the shortest path to the next shortest path. Because of this, it gives the user the opportunity to select this option whenever they choose the second shortest path, which allows them to be charged earlier and with less time spent traveling. An list of the charging stations that are connected to one another is presented in Table 5, and Fig. 6 illustrates the total number of charging stations that are connected to one another.

Number of mutual connections in each charging stations.
By scheduling the vehicle at the mutually connected charging stations, the FCFS algorithm ensures that the vehicle that arrived to the station first receives the charge. When a vehicle arrives at the very end of the line, it must wait for a considerable amount of time. This adds more time to the overall travel time. In contrast, the proposed algorithms disperse the charging station in a manner that is uniform for scheduling purposes. An algorithm will attempt to relocate to charging stations that are either not scheduled or scheduled with a minimum number of vehicles when a greater number of vehicles are accumulated on a single charging station, also known as the charging stations that are mutually connected to one another. Taking the tenth charging station as an example, there are no vehicles that are mutually connected with it. Additionally, charging stations 1, 5, and 8 are connected in a single path that is mutually connected. Charging stations 6, 7, and 12 are connected to each other through a total of six mutual paths, while charging stations 3, 4, and 12 are connected through a total of four mutual paths. The charging station that was assigned to a greater number of vehicles is rescheduled to be used by the unscheduled charging stations when the proposed algorithm is put into action. An example of this would be the fact that the six vehicles that arrived at the charging station in accordance with the FCFS algorithm have been divided up and rescheduled to stations in the surrounding area. Three of the vehicles will be moved to the tenth charging station, which will bring the total count to an even number. Both the charging time and the total travel time are significantly cut down as a result of this. For the purpose of arriving at the random destination points, it is assumed that 200 EVs are randomly started from random points and traveled through random nodes. WSO, CHHO, HHO, and FCFS are the four algorithms that are taken into consideration in this analysis. In this process, there are two things that need to be taken into consideration: among the vehicles, there are some that are not following the path that is the shortest, and all of the charging stations have only one charging pile. Waiting time for the vehicle to be charged is lengthened as a result of this.
The duration of the travel is also affected by the path that is chosen. Figure 7 shows the outcome of the simulation. When compared to other optimization algorithms, the WSO algorithm has better performance over others. The WSO algorithm has been replaced by the CHHO and HHO algorithms, which are exhibiting improved performance. In terms of the charge scheduling performance, the FCFS algorithm represents a more significant difference. The performance of all algorithms starts with similar performance from 1st EV to 23rd EV and it is start to increase with respect to the number of EVs. The peak waiting time of the proposed WSO algorithm is about 197 min, whereas the CHHO algorithm provides the peak waiting time of 219 min. The waiting time of vehicle which is scheduled using the HHO algorithm is 274 min which is almost 72% more than the proposed WSO algorithm. But the FCFS algorithm provides 361 min of waiting time for the 200th EV which is very high. This validation shows the better performance of the proposed WSO charge scheduling algorithm.

200 EVs scheduled using different algorithms.
Apart from this, the efficiency of the proposed algorithms is validated in different cases with real-time data. For that, environmental data has been created with different numbers of vehicles with 12 charging stations with different number of charging piles. In the first case, 25 vehicles are considered, and it has been scheduled in the created geographic area where 12 charging stations are fixed. However, the number of charging piles varied for carrying a effectiveness of the proposed algorithms. In each case, there are four different scenarios considered such as 12 charging stations with 1 charging pile, with 2 charging piles, with 3 charging piles and 4 charging piles. The algorithm has been simulated in a closed loop with 100 iterations and the average waiting time on every single iteration has been captured. There are two considerations has been assumed as, all the vehicles can access the charging station with the available SoC, the algorithms not strict to the shortest path, similarly it wont lied in the longest path, i.e. the distance more than 30% of shortest path. The average time is not constant in all the iterations which shows the scheduling behavior or the algorithm behavior for scheduling the vehicles. The average waiting time in each iteration is given in Table 5. Comparative analysis of CHHO, HHO, and FCFS with the proposed WSO algorithms shows that the normal waiting time for EVs at charging stations, WSO consistently performs better. In comparison, the wait time for WSO's 25 vehicles with one charging lots is 35.26 min, while the wait times for CHHO, HHO, and FCFS are 39.9, 53.97, and 51.73 min: Whenever there are more than four charging piles, the waiting time for WSO decreases to 0.03 min, indicating that resource allocation efficiency increases as demand increases. Under high density of EVs, the algorithm performs reasonably well. When 50 EVs are considered in the geographic area, WSO has the average waiting time of 51.51 min, 15.80 min, 8.37 min and 1.80 min at charging piles count varies from 1 to 4, whereas the CHHO algorithm has the second better performance among all four algorithms, which has 6.01 min more than the WSO algorithm with the charging pile 1. The HHO algorithm has the 76.37 min of waiting time for the 50 EVs when it served by 12 charging stations with one charging pule, similarly the FCFS algorithm has the 81.16 min in this scenario. Similarly, the analysis has been carried out for the four considerations of 25 EVs, 50 EVs, 75 EVs and 100 EVs and in all cases the charging piles varied from 1 to 4. Among the performance inferred from this validation the proposed WSO gives the better performance as compared to all other methods. The performance can be ranked as proposed WSO, CHHO, HHO and FCFS from high to low. The detailed results are given in Table 6.
The iteration has been simulated using the python and MATLAB platform. The results in the table shows the average values of each 100 iterations in different cases. Whereas the average waiting time at each iteration of each algorithm has been plotted using python. Figure 8 shows the average waiting time of at each algorithm when 25 EVs are scheduled on 12 charging stations with one to four charging piles. Similarly for the 50 EVs, 75 EVs and 100 EVs are shown in Figs. 9, 10 and 11.

Average waiting time of 25 EVs vs 12 CS (1 to 4 CP).

Average waiting time of 50 EVs vs 12 CS (1 to 4 CP).

Average waiting time of 75 EVs vs 12 CS (1 to 4 CP).

Average waiting time of 100 EVs vs 12 CS (1 to 4 CP).
The proposed WSO algorithm also reduces the charging cost by limiting the cost function of charge scheduling. Generally, the cost function is based on the charging demand, whenever more number of EVs are scheduled at a single charging station, the cost function in the charging schedule will be increased. This rise in cost function will directly increase the charging cost of that particular schedule. By avoiding the accumulation of EVs in a single charging station during the peak time, the cost function can be optimized. The proposed WSO algorithm effectively reduces the waiting time, that directly optimizes the charging cost. The average charging cost of each scheduling has given in Table 7. The proposed WSO algorithm has the minimum average charging cost as compared to other algorithms. The average charging cost of each iteration has been plotted Figs. 12, 13, 14 and 15.

Average charging cost of 25 EVs vs. 12 CS (1 to 4 CP).

Average charging cost of 50 EVs vs. 12 CS (1 to 4 CP).

Average charging cost of 225 EVs vs. 12 CS (with varies charging piles 2 to 5).

Average charging cost of 300 EVs vs. 12 CS (with varies charging piles 2 to 5).
When 25 number of EVs are scheduled to 12 charging stations with 1 to 4 charging piles, the WSO shows its superior performance of providing the less charging cost. When 25 EVs are scheduled by considering each charging station had one charging pile, the proposed WSO provides the charging cost of 363.95 INR, and CHHO gives the second-best cost and HHO and FCFS methods are trailing behind these two methods. When the number of charging piles are increased from 1 to 2,3,4 the average charging cost gets reduced, and all four algorithms are operating with more similar charging cost. On the second case of 50EVs with same scenario, the WSO algorithm dominates other algorithms in charging stations with one and two charging piles. When the number of charging piles are 3 and 4, all the four methods are operating with the same cost function. But in 75 EVs and 100 EVs in same scenario, the proposed WSO algorithm outperforms the other three methods in all cases. It is inferred that the usage of EVs is gaining popularity in recent years, where still there is some lag regarding the development of EV infrastructure. In real time, the number of charging infrastructure is limited to very few as compared to petrol banks and gas stations. The fueling infrastructure in fuel-based vehicles is always following the FCFS progress without any scheduling process. As the development of EV infrastructure is at mid-range, the charging stations are very few and, in this scenario, the FCFS is not suitable. The charge scheduling algorithm and process can be able to identify the data and coordinate the EVs and charging stations. When the charging infrastructure is attained completely, the FCFS algorithm will be applicable as like in fuel stations. Until this, the charging infrastructure required an intelligent algorithm for the efficient access and coordination between EVs and charging stations. The proposed WSO algorithm effectively schedules the EVs when the number of charging stations are limited and also it reduces the waiting time at charging stations and its corresponding charging cost.
Conclusion
This work proposed and validated a new kind of charge scheduling algorithm based on WSO, which is inspired from the strategies used in ancient wars. For validating the performance of proposed algorithm, there are different scenarios by varying the number of EVs by 25 to 100 and by varying the charging piles from 1 to 4 in all 12 charging stations. Also, the performance of the proposed WSO has been compared with the other algorithms such as CHHO, HHO, FCFS and when the number of charging piles are increased from 1 to 2,3,4 the average waiting time and average charging cost gets reduced, and all four algorithms are operating with more similar performance. The WSO algorithm achieved significant improvements in both waiting time and charging cost. Specifically, the WSO algorithm reduced waiting time by 11.17% compared to the CHHO algorithm, 39.09% compared to the HHO algorithm, and 83.25% compared to the FCFS algorithm. In terms of charging cost, the WSO algorithm achieved reductions of 3.61% compared to the CHHO algorithm, 12.45% compared to the HHO algorithm, and 13.67% compared to the FCFS algorithm. This shows that, the existing algorithms are capable and efficient in conditions such as, less number of EVs and more number of charging options and when the number of EVs are increased these algorithms are inefficient on scheduling. But the proposed WSO algorithm gives the better performance as compared to the other algorithms in all cases of validation.
Data availability
The data used to support the findings of this study are included in the article.
References
CanalsCasals, L., Martinez-Laserna, E., AmanteGarcía, B. & Nieto, N. Sustainability analysis of the electric vehicle use in Europe for CO2 emissions reduction. J. Clean. Prod. 127, 425–437. https://doi.org/10.1016/j.jclepro.2016.03.120 (2016).
Liu, W.-L. et al. Coordinated charging scheduling of electric vehicles: A mixed-variable differential evolution approach. IEEE Trans. Intell. Transp. Syst. 21(12), 5094–5109. https://doi.org/10.1109/TITS.2019.2948596 (2020).
Cao, Y. et al. Toward pre-empted EV charging recommendation through V2V-based reservation system. IEEE Trans. Syst. Man Cybern. Syst. 51(5), 3026–3039. https://doi.org/10.1109/TSMC.2019.2917149 (2021).
Xie, F., Liu, C., Li, S., Lin, Z. & Huang, Y. Long-term strategic planning of inter-city fast charging infrastructure for battery electric vehicles. Transp. Res. E Logist. Transp. Rev. 109, 261–276. https://doi.org/10.1016/j.tre.2017.11.014 (2018).
Barco, J., Guerra, A., Muñoz, L. & Quijano, N. Optimal routing and scheduling of charge for electric vehicles: A case study. Math. Probl. Eng. 2017, 1–16. https://doi.org/10.1155/2017/8509783 (2017).
Alonso, M., Amaris, H., Germain, J. & Galan, J. Optimal charging scheduling of electric vehicles in smart grids by heuristic algorithms. Energies 7(4), 2449–2475. https://doi.org/10.3390/en7042449 (2014).
El-Bayeh, C. Z., Alzaareer, K., Aldaoudeyeh, A.-M.I., Brahmi, B. & Zellagui, M. Charging and discharging strategies of electric vehicles: A survey. World Electric Veh. J. 12(1), 11. https://doi.org/10.3390/wevj12010011 (2021).
Barshandeh, S., Piri, F. & Sangani, S. R. HMPA: An innovative hybrid multi-population algorithm based on artificial ecosystem-based and Harris Hawks optimization algorithms for engineering problems. Eng. Comput. 38(2), 1581–1625. https://doi.org/10.1007/s00366-020-01120-w (2022).
Barshandeh, S. & Haghzadeh, M. A new hybrid chaotic atom search optimization based on tree-seed algorithm and Levy flight for solving optimization problems. Eng. Comput. 37(4), 3079–3122. https://doi.org/10.1007/s00366-020-00994-0 (Oct.2021).
Yang, S.-N., Cheng, W.-S., Hsu, Y.-C., Gan, C.-H. & Lin, Y.-B. Charge scheduling of electric vehicles in highways. Math. Comput. Model 57(11–12), 2873–2882. https://doi.org/10.1016/j.mcm.2011.11.054 (2013).
de Weerdt, M. M., Stein, S., Gerding, E. H., Robu, V. & Jennings, N. R. Intention-aware routing of electric vehicles. IEEE Transact. Intell. Transp. Syst. 17(5), 1472–1482. https://doi.org/10.1109/TITS.2015.2506900 (2016).
Cao, Y. et al. An EV charging management system concerning drivers trip duration and mobility uncertainty. IEEE Trans. Syst. Man Cybern. Syst. 48(4), 596–607. https://doi.org/10.1109/TSMC.2016.2613600 (2018).
Cao, Y., Ahmad, N., Kaiwartya, O., Puturs, G. and Khalid, M. ‘Intelligent transportation systems enabled ict framework for electric vehicle charging in smart city’, in Handbook of Smart Cities, Cham: Springer International Publishing, pp. 311–330. https://doi.org/10.1007/978-3-319-97271-8_12. (2018).
Kobayashi, Y., Kiyama, N., Aoshima, H. and Kashiyama, M. ‘A route search method for electric vehicles in consideration of range and locations of charging stations’, in 2011 IEEE Intelligent Vehicles Symposium (IV), IEEE, pp. 920–925 https://doi.org/10.1109/IVS.2011.5940556 (2011).
Campbell, A. A., Cherry, C. R., Ryerson, M. S. & Yang, X. Factors influencing the choice of shared bicycles and shared electric bikes in Beijing. Transp. Res. Part C Emerg. Technol. 67, 399–414. https://doi.org/10.1016/j.trc.2016.03.004 (2016).
Guo, Q., Xin, S., Sun, H., Li, Z. & Zhang, B. Rapid-charging navigation of electric vehicles based on real-time power systems and traffic data. IEEE Trans. Smart Grid 5(4), 1969–1979. https://doi.org/10.1109/TSG.2014.2309961 (2014).
Ding, D. et al. Electric vehicle charging warning and path planning method based on spark. IEEE Access 8, 8543–8553. https://doi.org/10.1109/ACCESS.2020.2964307 (2020).
Barbecho Bautista, P., Lemus Cárdenas, L., Urquiza Aguiar, L. & Aguilar Igartua, M. A traffic-aware electric vehicle charging management system for smart cities. Veh. Commun. 20, 100188. https://doi.org/10.1016/j.vehcom.2019.100188 (2019).
Wang, L. & Chen, B. Distributed control for large-scale plug-in electric vehicle charging with a consensus algorithm. Int. J. Electr. Power Energy Syst. 109, 369–383. https://doi.org/10.1016/j.ijepes.2019.02.020 (2019).
Wang, X., Zheng, X. & Liang, X. Charging station recommendation for electric vehicle based on federated learning. J. Phys. Conf. Ser. 1792(1), 012055. https://doi.org/10.1088/1742-6596/1792/1/012055 (2021).
Luo, Y. et al. Charging scheduling strategy for different electric vehicles with optimization for convenience of drivers, performance of transport system and distribution network. Energy 194, 116807. https://doi.org/10.1016/j.energy.2019.116807 (2020).
Bersani, C., Zero, E., and Sacile, R. ‘A decision support system for the optimal location of electric vehicle charging points’, in 2019 IEEE International Conference on Systems, Man and Cybernetics (SMC), IEEE, pp. 2707–2712. https://doi.org/10.1109/SMC.2019.8914033 (2019).
Xiao, D., An, S., Cai, H., Wang, J. & Cai, H. An optimization model for electric vehicle charging infrastructure planning considering queuing behavior with finite queue length. J. Energy Storage 29, 101317. https://doi.org/10.1016/j.est.2020.101317 (2020).
Ma, W., Pi, X. & Qian, S. Estimating multi-class dynamic origin-destination demand through a forward-backward algorithm on computational graphs. Transp. Res. Part C Emerg. Technol. 119, 102747. https://doi.org/10.1016/j.trc.2020.102747 (2020).
Pavić, I., Pandžić, H. & Capuder, T. Electric vehicle based smart e-mobility system—definition and comparison to the existing concept. Appl. Energy 272, 115153. https://doi.org/10.1016/j.apenergy.2020.115153 (2020).
Wang, L., Wang, X. & Yang, W. Optimal design of electric vehicle battery recycling network—from the perspective of electric vehicle manufacturers. Appl. Energy 275, 115328. https://doi.org/10.1016/j.apenergy.2020.115328 (2020).
Aljanabi, M., Ismail, M. A. & Mezhuyev, V. Improved TLBO-JAYA algorithm for subset feature selection and parameter optimisation in intrusion detection system. Complexity 2020, 1–18. https://doi.org/10.1155/2020/5287684 (2020).
Ali, A. H., Aljanabi, M. & Ahmed, M. A. Fuzzy generalized hebbian algorithm for large-scale intrusion detection system. Int. J. Integr. Eng. 12, 1. https://doi.org/10.30880/ijie.2020.12.01.008 (2020).
Ibraheem, H. R. et al. A new model for large dataset dimensionality reduction based on teaching learning-based optimization and logistic regression. TELKOMNIKA (Telecommun. Comput. Electron. Control) 18(3), 1688. https://doi.org/10.12928/telkomnika.v18i3.13764 (2020).
Das, H. S., Rahman, M. M., Li, S. & Tan, C. W. Electric vehicles standards, charging infrastructure, and impact on grid integration: A technological review. Renew. Sustain. Energy Rev. 120, 109618. https://doi.org/10.1016/j.rser.2019.109618 (2020).
Zhan, K. et al. A probability transition matrix based decentralized electric vehicle charging method for load valley filling. Electric Power Syst. Res. 125, 1–7. https://doi.org/10.1016/j.epsr.2015.03.013 (2015).
Mouhcine, E., Mansouri, K. and Mohamed, Y. ‘Intelligent vehicle routing system using VANET strategy combined with a distributed ant colony optimization, 2019, pp. 230–237. https://doi.org/10.1007/978-3-030-11914-0_25.
Kumar, V. M., Chokkalingam, B. & Mihet-Popa, L. Mitigation of complexity in charging station allocation for EVs using chaotic harris hawks optimization charge scheduling algorithm. IEEE Access 11, 130466–130482. https://doi.org/10.1109/ACCESS.2023.3334672 (2023).
Tummala, S. L. V. et al. War strategy optimization algorithm: A new effective metaheuristic algorithm for global optimization. IEEE Access 10, 25073–25105. https://doi.org/10.1109/ACCESS.2022.3153493 (2022).
Author information
Authors and Affiliations
Contributions
Data curation, V.M.; Formal analysis, V.M and PKB; Methodology, V.M. and C.S.; Project administration, S.B.T, Resources, S.S., and S.B.T; Supervision, C.S. AND P.K.B.; Writing–original draft, V.M. and S.B.T. All authors have read and agreed to the published version of the manuscript.
Corresponding author
Ethics declarations
Competing interests
The authors declare no competing interests.
Additional information
Publisher's note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
Open Access This article is licensed under a Creative Commons Attribution-NonCommercial-NoDerivatives 4.0 International License, which permits any non-commercial use, sharing, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons licence, and indicate if you modified the licensed material. You do not have permission under this licence to share adapted material derived from this article or parts of it. The images or other third party material in this article are included in the article’s Creative Commons licence, unless indicated otherwise in a credit line to the material. If material is not included in the article’s Creative Commons licence and your intended use is not permitted by statutory regulation or exceeds the permitted use, you will need to obtain permission directly from the copyright holder. To view a copy of this licence, visit http://creativecommons.org/licenses/by-nc-nd/4.0/.
About this article

Cite this article
Madaram, V., Biswas, P.K., Sain, C. et al. Optimal electric vehicle charge scheduling algorithm using war strategy optimization approach. Sci Rep 14, 21795 (2024). https://doi.org/10.1038/s41598-024-72428-6
Received:
Accepted:
Published:
DOI: https://doi.org/10.1038/s41598-024-72428-6
Keywords
This article is cited by
-
Enhanced CNN based approach for IoT edge enabled smart car driving system for improving real time control and navigation
Scientific Reports (2025)
-
Improved deep learning model for accurate energy demand prediction and conservation in electric vehicles integrated with cognitive radio networks
Scientific Reports (2025)
-
Explainable artificial intelligence with temporal convolutional networks for adverse weather condition detection in driverless vehicles
Scientific Reports (2025)
