
Abstract
Targeting the lateral motion control problem in the intelligent vehicle autopilot structural system, this paper proposes a feedforward + predictive LQR algorithm for lateral motion control based on Genetic Algorithm (GA) parameter optimisation and PID steering angle compensation. Firstly, based on the vehicle dynamics tracking error model, the intelligent vehicle LQR lateral motion controller as well as the feedforward controller are designed, and upon which the predictive controller is added to eliminate the system lag.Subsequently, exploiting the advantage that the PID algorithm is not model-based, a PID steering angle compensation controller that can directly control and correct the lateral error is designed. Second, a LQR controller based on path tracking deviation is designed by using the parameter rectification method of genetic algorithm (GA), which optimizes the control parameters of the lateral motion controller and improves the adaptivity of the control accuracy. Finally, Based on the Carsim-Simulink co-simulation platform, the simulation validation and analysis of double lane change (DLC) test and circular condition test (CCT) are carried out, and the results indicate that compared with the other two LQR controllers, the optimised controllers improved more than 50% in lateral error and heading error control, and the vehicle sideslip angle and vehicle yaw rate are in the range of −0.05° to 0.05° and − 0.15 rad/s to 0.10 rad/s, and it showed improved performance in tracking accuracy and satisfied vehicle stability constrains.
Similar content being viewed by others
Introduction
Intelligent Vehicle is among the popular research directions in the field of automotive industry in recent years, and its emergence sets a trend for a new wave of automotive technology. Intelligent vehicles have the ability of autonomous perception, decision-making and control, and are able to realize a safe, efficient and comfortable driving experience by sensing the environment and making decisions according1. Lateral motion control for autonomous driving is one of the three main cores of this technology. According to the target path information from the upper-level decision planning system, corresponding steering control commands are output to control the vehicle along the target path. As being the core of the overall movement control system, the strengths and weaknesses of the transverse motion control methods will not only affect the tracking accuracy of the intelligent vehicle on the target path, but also have an impact on the stability and comfort of the whole vehicle2.
To date, many scholars have combined the design of intelligent driving vehicle systems with vehicle dynamics models to carry out research on lateral motion control methods, and have achieved fruitful results. Pereira3 and others proposed a new nonlinear curvature response model of vehicles based on the MPC (Model Predictive Control) lgorithm, which was estimated online by Kalman filtering, and the designed controllers and curvature response models have high lateral control accuracy and stability, but the method requires high accuracy of the model and the precision of the environment perception, and it also requires real-time adjustment and optimization of the controller parameters, in addition, the computational complexity of the method is relatively high, and it requires a high-performance computing platform to achieve real-time performance and efficiency. Guo4 designed a novel robust H ∞ fault-tolerant state feedback lateral control law, the controller remains capable of stabilizing the vehicle’s lateral motion and tracking the desired road despite actuator failures and parameter uncertainties. However, no real vehicle experiments were conducted to verify it. Hwang5 proposed a robust nonlinear control method for lateral control of an autonomous vehicle using the barrier Lyapunov function (Barrier Lyapunov Function, Abbreviated as BLF) under the constraints of lateral offset error, which showed high robustness and stability in the face of lateral offset error and external disturbances, and was able to limit the lateral offset error so that the vehicle could accurately track the intended trajectory. Kang6 proposed an improved ADRC(Active Disturbance Rejection Control) path tracking control method, which can estimate and compensate the vehicle dynamic characteristics and environmental changes in real time, and improve the robustness and stability of path tracking. Wang7 designed an improved LQR (Linear Quadratic Regulator) controller based on the real-time updating algorithm and fuzzy control, and the experimental results show that the improved LQRcontroller is more robust and stable when facing the lateral offset error and external disturbances, so that the vehicle can accurately track the intended trajectory, and it is more robust and stable when facing the transverse offset error and external disturbances. The results show that this improved LQR lateral path tracking method has higher path tracking accuracy and stability, but still lacks in robustness. Literature on linear quadratic regulators8,9,10,11,12,13 designed and tested lateral controllers for intelligent vehicles based on linear quadratic regulator (LQR), MPC, NMPC (Nonlinear Model Predictive Control), LPV (Linear Parameter-Varying) control method, LMI (Linear Matrix Inequality) robust control method, sliding film variable structure, PID (Proportional-Integral-Derivative Controller), and other control methods, respectively, and achieved good control effect scenarios in specific tests. In summary, the design of control methods is the core of the whole control system of the lateral control of intelligent vehicles. At present, the research on the control method mainly focuses on a single factor and has achieved certain results.
LQR control is one kind of optimal control, which has been applied in many fields14. In 1960, Rudolph E. Kalman proposed LQR for the first time, which laid the foundation of LQR theory15. Subsequently, the LQR theory was further improved by C Gokcek, PT Kabamba et al. It mainly includes the solution method of optimal state feedback control and the analysis of asymptotic stability16,17. In 1992, Hauser et al. proposed an optimal control method based on LQR applied to the vehicle formation control problem, and analysed its performance in maintaining the formation formation and reducing the following error, and achieved excellent control results18. Pacejka et al. proposed an active front wheel steering control strategy based on LQR in 1997, aiming to improve vehicle handling and stability, and the results showed that the LQR controller was excellent in handling nonlinear dynamics and uncertainty18,19. In 2009, Snider20 of Stanford University proposed to apply the LQR control method to the path tracking control of a vehicle and modeled the dynamics with the curvature perturbation of the road surface included. Although this control method stabilizes the system, it does not take into account the effect of the disturbance term, and the tracker suffers from steady-state error. Kapania21 proposed a feedforward + feedback LQR steering controller. The design first considered the nonlinear vehicle dynamics modeling and the construction of the controller for the feedforward control method. Meanwhile, it exhibits a significant increase in steady-state path deviation at high speeds. Xu et al.22 proposed to add a road curvature feed-forward link on top of the LQR feedback control to eliminate the steady-state error of lateral displacement. In summary, the advantage of LQR in intelligent driving lateral control is that it can ensure that the intelligent vehicle tracking control system is close to the equilibrium state while consuming the minimum energy when the vehicle is yawing during driving. Research based on the LQR control method has been widely applied to intelligent vehicles, but control stability still needs to be improved.
Addressing the accuracy and stabilization problems of intelligent driving lateral motion control, and considering the interference factors of the practical environment, the paper proposes a feedforward + predictive LQR algorithm lateral motion control method based on Genetic Algorithm (GA) parameter optimization and PID steering angle compensation (referred to as FP + PID-GA-LQR in later Figs. 9 and 10). Firstly, a predictive controller is designed to be added to the traditional LQR controller to eliminate the system response lag problem. Secondly, a genetic algorithm is introduced for parameter optimisation, so that the control system is capable of adaptively updating the control parameters according to different driving environments. Then, a PID steering angle compensation controller is designed to compensate for the model mismatch due to the small angle assumption during the vehicle modelling process, which enhances the robustness of the system. Finally, the control algorithm is simulated in double lane change condition and circular condition by Carsim-Sinmulink joint simulation platform, and the simulation results are compared and analysed to verify the effectiveness of the control method proposed in this paper.
Establishment of vehicle dynamics model
Vehicle dynamics tracking error model
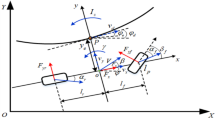
Since the vehicle system is a complex nonlinear and time-varying parameter uncertainty system23, in the lateral control of the vehicle, the research mainly focuses on the lateral dynamics of the vehicle. In this paper, only two degrees of freedom of motion, lateral and transverse, are considered, and the vehicle is simplified as a two-degree-of-freedom “bicycle” model24, and the longitudinal velocity vx is assumed to be a constant as shown in Fig. 1. Some of the structural parameters of the selected model based on Carsim are shown in Table 1.

Vehicle dynamics tracking error model.
The model is based on the assumptions set out below:
-
The vehicle is traveling on a flat road; i.e., the vertical motion of the vehicle is not considered;
-
Without considering the influence of the vehicle suspension system;
-
The steering angle works directly on the front wheels of the vehicle;
-
The tires are in good contact with the ground;
-
Load transfer is neglected;
-
Air resistance is neglected.
By analyzing the two-degree-of-freedom vehicle model of Fig. 1, assuming a constant vehicle speed and making small angle assumptions, the following dynamic equations can be obtained:
where m is the mass of the vehicle; Fyf and Fyr are the lateral forces on the front and rear axles of the vehicle, respectively; Iz is the rotational moment of inertia of the vehicle around the Z-axis; \(\ddot {\varphi }\) is the angular acceleration of the vehicle’s transverse swing; lf and lr are the distances from the center of mass of the vehicle to the front and rear axles, respectively.
High-speed moving vehicles generate a lateral deflection angle in their tires. Experimental results indicate that at small deflection angles, the lateral force of the tire is directly proportional to the deflection angle, i.e. Fy=Cα. Drawing on rigid body kinematics, the expressions for the lateral deflection angles of the front and rear wheels can be obtained as:
where β is the center of mass lateral deviation angle; δf is the front wheel turning angle of the vehicle; the front wheel turning angle is generally small, so this paper makes tan(δf + αf) = δf + αf, vx and vy represent the longitudinal velocity and lateral velocity of the car, respectively; \(\dot {\varphi }\) is the vehicle’s transverse pendulum angular velocity. Due to the existence of the transverse swing angle ϕ, the lateral acceleration of the vehicle \({a_y}={\dot {v}_y}+{v_x}\dot {\varphi },\) which is brought into the above kinetic equations, can be obtained by organizing the kinetic equations to obtain the state space expression:
Vehicle generates lateral and heading errors when tracking the planned path in real time. In practical control, in order to realize accurate lateral control, the designed lateral controller is required to eliminate these two errors in real time. Therefore, it is necessary to convert the vehicle’s dynamics model into a dynamics error model. The lateral error ed is defined as the distance between the center of mass of the vehicle and its projection point on the planning path; the heading error eϕ is the deviation of the heading angle of the current position from the tangent direction of the projection point on the planning path.
According to the definition of lateral error ed, it can be expressed as:
where v is the center of mass velocity of the vehicle; θ is the heading angle of the vehicle; θr is the theoretical heading angle at the current moment.
According to the definition heading angle is the sum of the transverse pendulum angle ϕ and the center of mass lateral deflection angle β. From the dynamics model in Fig. 1, we can get vx=vcos(β),vy=vsin(β). Defining eϕ as the approximate heading error and assuming that the difference between ϕ and θr is particularly small, i.e., the value of β is small, then eϕ = ϕ − θr. After calculations and simplified and brought into Eqs. (2) and (3) can be obtained:
According to the definition of heading error eϕ with the above analysis, it can be obtained:
Derivation of (7) can be launched:
Bringing Eq. (4) into Eqs. (6) and (8) yields \({\ddot {e}_d}\):
Continued decomposition yields \({\ddot {e}_\varphi }\):
Continuing the transformation of the above equations, the state space expressions for the lateral error and heading error of the vehicle while performing path tracking are obtained:
A rewriting of the above Eq. (11) yields a space state expression for the dynamics error model of the vehicle as:
As in real applications, especially in computers, discrete data are handled and the planned path is often tracked based on planned target points rather than a continuous path. So it is necessary to use discrete LQR control. Discretization of the above continuous state space equation (12), ignoring the effect of \({\dot {\theta }_r}\), and integrating both sides of the equation yields:
By the median theorem of integration:
Generally speaking the accuracy of the system employing the midpoint Euler method is higher, but as the inputs are only known at the current moment, a mixture of the forward Euler method and midpoint Euler method is used for the above Eq. (14), so that \(X(\xi )=\left( {X(t)+X(t+dt)} \right)/2,U(\xi )=U(t)\), substituting into Eq. (14), and the state-space equations of the discretized vehicle tracking error model can be obtained by organizing and simplifying as follows:
where \(\bar {A}={\left( {I - \frac{{Adt}}{2}} \right)^{ - 1}}\left( {I+\frac{{Adt}}{2}} \right),\bar {B}=Bdt\) and I denotes the unit matrix.
Lateral control system design
According to the error tracking model of the intelligent driving vehicle, the lateral controller illustrated in Fig. 2 as follows is designed to limit the lateral error and heading error of the vehicle during the target path tracking process, so as to minimise the state error between the vehicle’s current driving position and the reference position as much as possible.

Design of lateral control system.
Initially, the vehicle parameters are output using the vehicle dynamics tracking error model established as above, the LQR controller is designed and discretised, and subsequently, the feedforward controller is devised to eliminate the steady state error of the system. Moreover, based on this, a predictive controller was added to eliminate the system lag. And the efficient and parallel global search capability of genetic algorithm (GA) is utilised to perform parameter optimisation of the weights of Q and R of the LQR controller based on the current target path. Then the target path of the vehicle to be simulated is selected and designed and combined with the feedforward controller to output the current position information of the vehicle and calculate the state error. Considering the ideal neglect assumptions in establishing the vehicle tracking model, and the design of the controller also relies on the simplified model, this paper uses a non-model-based PID controller to directly control and correct the transverse error, which compensates the final output of the front wheel angle by a small angle Δδ. The feedforward controller is then combined with the GA controller, which is a feedforward controller, to calculate the state error of the vehicle, and the final output of the vehicle position information. Thereafter, the feedforward controller combined with the GA-LQR control module calculates and inputs the current desired front wheel steering angle of the vehicle. Ultimately, the output front wheel steering angle from the calculation module is fed back to the vehicle controller for real-time control to enable the vehicle to accurately track the target path.
Design of LQR controller
In modern control theory, a linear system represented by a state space expression is the mainly research object of LQR (Linear Quadratic Regulator), and the objective function is a quadratic function of the object function and control25. The advantage of Linear Quadratic Optimal Control (LQR) in the field of intelligent driving is that when the system has control deviations, it can use a small amount of control energy to make the system quickly approach the target state, which is not only stable, but also the control effect is fast. It is suitable for addressing multivariate, linear and linearisable full-state feedback control problems, and has good robustness against the effects of noise. Therefore, based on the discretised vehicle dynamics state space expression constructed by Eq. (15) in the previous section, the performance index function of the LQR controller is constructed as follows:
where Xk is the state variable of the system; Uk is the control variable of the system; Q and R represent the state error weighting matrix and the weighting matrix of the control quantity of the controller, respectively, where Q is a positive definite or semi-positive definite matrix and R is a positive definite matrix.
The essential core of the LQR controller is to design the control law such that Eq. (16) is minimised. Thus, the Hamiltonian function is constructed:
This is obtained by taking the derivative of Eq. (17) and resolving the extremes:
where λk+1 = 2Pk+1Xk+1 is the solution of the Riccati equation P(t)PA + ATP-PBR−1BPT+Q = 0.
As a corollary, the final control law of the LQR controller for a smart driving car is as follows:
where k = [k1, k2, k3, k4] is the gain of the LQR controller.
Feedforward controller design
By combining Eq. (19) equivalent Eq. (12) can be obtained:
By analysing Eq. (20), it can be observed that the system has a steady state error, i.e., it is not guaranteed that the lateral error and heading error of the vehicle during driving is 0. Therefore, in this paper, the design of a feedforward controller is considered to eliminate the steady state error. Setting the front wheel turning angle of the feedforward control output as δk, the complete control law can be expressed as:
When the controller reaches the optimal control, i.e., when the steady state error of the system is 0, Eq. (21) can be obtained by bringing Eq. (12) into Eq. (12):
Laplace transforming Eq. (22) and solving for the extremes yields the steady state errors for lateral deviation ed_s and heading deviation eϕ_s, respectively:
Through Eq. (23), it can be seen that the steady state error ed_s of the lateral deviation can be compensated and thus eliminated by feedforward control, while considering the assumptions made above eθ = ϕ + β − θr = 0, and combining with Eq. (23) the following equation can be deduced:
According to Eq. (24), eθ = ϕ + β − θr = 0, so the steady state error value of the heading error will not need the feedforward part for cancellation. In summary, the feedforward control law obtained in this question is:
where ρ denotes road curvature.
Predictive controller design
Humans are capable of making predictive driving manoeuvres based on changes in the environment and path conditions in front of them while driving a vehicle, however, the aforementioned LQR controller and feedforward controller that are designed based on the vehicle dynamics tracking error model do not possess the predictive performance. In order to enable vehicles to possess the capability of predicting future target paths and making driving actions in advance, Takemura et al.26 designed long horizon predictive planning-tracking controllers by introducing position-field-of-view prediction similarity judgement method in the multi-intelligence path planning-tracking problem, which improved the planning and tracking performance of the intelligences in variable dynamic environments.
According to the test, it is observed that when the vehicle is in the situation shown in Fig. 3, the lateral control system detects that there is a distance error between the vehicle and the target path, and the system determines that the steady state error is not zero in determining that the vehicle can not track the point Spre, but in the period of time after the point Spre of the target path, the vehicle is still capable of accurately tracking the target path without changing the angle of rotation of the front wheels.

Schematic diagram of scenario I.
As shown in Fig. 4, the vehicle is currently travelling on the target path, at which the lateral control system detects that the lateral error is zero and the heading error is close to zero, i.e., the system determines that the steady-state error is zero and makes the determination that the vehicle is able to track the target path point. Until the vehicle gradually deviates from the target path, the system will not control the vehicle until it detects the steady state error, so that the vehicle can keep travelling on the target path point Spre_t2, which is caused by the control hysteresis of the feedforward-LQR controller.

Schematic diagram of scenario II.
Aiming at the above possible issues, this paper adds a predictive controller on the basis of the feedforward-LQR controller, Fig. 5 illustrates the predictive control model, from which it can be seen that it eliminates the lag of the control system by predicting the target path points in the future period of time, and then the lateral control system makes motion control operations on the vehicle in advance. This improves the operating efficiency of the control system, which in turn improves the path tracking accuracy and driving stability as well as comfort.

Schematic diagram of the predictive control model.
The prediction time is setting as ts and the coordinate location information of the prediction time points are (Xpre, ypre, vxpre, vypre, φpre, \({\dot {\varphi }_{per}}\)) Based on the θ = ϕ + β menioned above, the following equation can be obtained.
Design of PID steering angle compensation controller
Several simplifying assumptions are applied in constructing the vehicle error tracking model. Although feedforward control can reduce the steady state error to some extent, it is considered that in practice there are errors in terms of model mismatch and tyre side bias stiffness estimation. In addition, the controller design also relies on simplified models and feedforward control may face a number of problems such as hysteresis control. Therefore, in this paper, a PID controller that is not model-based is employed to directly control the correction of lateral errors. In this way, small-angle Δδ steering compensation is performed and the corrected result is compensated into the front wheel steering angle to improve the effect of steady state error caused by model mismatch and inaccurate parameter estimation. Figure 6 below shows the technology roadmap for PID steering compensation controllers, with the transfer function between G(s) inputs and outputs.

Technical route of PID steering compensation controller.
where Δδ is the small angle steering angle compensation; a1, a2, a3 are the proportionality coefficient, integration coefficient, differential coefficient, respectively.
The performance of the PID controller depends on its three tuning parameters namely proportional, integral and differential gain. In this paper, parameter tuning has been carried out with reference to a univariate tuning parameter formula for online robustness and performance tuning proposed by Verma et al.27. The obtained parameter results are shown in Table 2 below.
Genetic algorithm for LQR controller parameter optimisation
As the designed LQR transversal controller is applied in path tracking, the weight matrices Q and R in the LQR control algorithm take values that have a significant impact on the control performance of this algorithm. In case Q is larger, the control algorithm performs better but at the expense of stability. In case R is larger, the control process of tracking will be smoother and smoother, and the angle of the front wheel will not change drastically, which ensures the safety of the system, but it is easily caused by the problem of reduced tracking accuracy. The state weight matrix Q and control energy weight matrix R of the traditional LQR controller are often based on experience, relying on manual step-by-step trial and error, which is highly subjective. Therefore, in this paper, we consider introducing a genetic algorithm with better global search capability to solve the optimisation problem.
The general structure of a genetic algorithm is presented in Fig. 7. To begin with, a set of initial populations is randomly generated, and then new populations are continuously generated by selecting, crossing over and mutating28. Afterwards, the parameters are continuously modified by minimising the fitness factor until a fixed maximum generation is obtained.

Generic architecture of GA.
The specific parameters of the genetic algorithm (GA) are shown in Table 3, where both Q and R are diagonal matrices, and the appropriate variables are selected for focused optimisation based on the importance of the relevant variables to the research objectives, as a way to improve the performance and computing speed of the controller. At the same time, in order to make the initial solution uniformly distributed in the search space, this paper sets an appropriate population size.
The evolutionary direction in genetic algorithm is determined by the calculation of the adaptation degree. Considering the control accuracy and vehicle stability, this paper designs the performance index function PGA and the fitness function F, which combines the effects of Q and R. The lateral error ed, the heading error eϕ and the front wheel angle δf in the path tracking are also taken into account, furthermore, these variables are normalised by a fixed mean obtained from a single test in order to reduce the size differences.
where η1, η2, and η3 are weighting factors characterising the importance given to lateral error, heading error, and front wheel angle respectively, and the sum of the three is one.
The selection operation in genetic algorithms essentially embodies a process of natural selection, i.e., individuals that are more adaptable to the environment have a greater probability of being inherited by the following generation, while individuals with weaker adaptive ability have a lower probability of being inherited by the next generation. In order to select excellent individuals as parents to generate new populations, and to better adapt to the problem characteristics and optimisation objectives of path tracking, this paper chooses to employ roulette selection and uniform sampling29, which avoids certain individuals from monopolising the selection process, and thus improves the fairness of the original roulette selection.
According to the above parameters and the established fitness function, the execution is looped until the termination criterion set in this paper is reached, and the current global optimal solution and LQR optimal weight matrix are output. Figure 8 illustrates the relationship between the fitness value and the number of iterations for the following two simulation conditions, with Q and R weights as shown in Table 4 below.

Relationship between fitness value and number of iterations.
Simulation analysis
DLC path tracking test
Simulation validation is carried out based on the Carsim-Simulink co-simulation platform, and the simulation conditions are selected as double lane change conditions (DLC), the road adhesion coefficient µ is divided into two sections: 0.5 and 0.8, with road surface roughness (IRI) of 2 m/km and 5 m/km, respectively. In order to better evaluate the performance of the feedforward + predictive LQR algorithm controller based on PID steering angle compensation and GA parameter optimisation designed in this paper, the simulation results are tested in comparison with those of the feedforward-control-free LQR controller and the feedforward + LQR controller were compared and tested with the two LQR controller weight coefficients Q = [30,1,5,1], R = 6. The test results are shown in Fig. 9 below.

Double lane change condition test results (72 km/h).
Figure 9c demonstrates the comparison of the tracking effect of the three controllers under the double lane change line condition at a speed of 72 km/h. As can be seen from the figure, all three controllers are able to track the target path effectively from the perspective of the whole path, and the feedforward-predictive + PID-GA-LQR control has the most efficient tracking effect on the overall path of the vehicle, particularly in the two c feedforward-predictive + PID-GA-LQR urves of the target path, which is more efficient compared to the other two controllers. Figure 8a and b show the lateral error and heading error of the three controllers under this working condition. It can be observed that in the straight line phase at the beginning and near the end of the target path, the three control methods can track the target path better, and the lateral error and heading error can be controlled within a more reasonable range, but the LQR controller without added feedforward control has an obvious hysteresis phenomenon in the control of the vehicle compared to the feedforward + LQR controller and the feedforward-predictive + PID-GA-LQR controller, Which also caused a remarkable variation in the adjustment of the amount of error by the three controllers. From Table 5, it can be observed that the maximum lateral error and the maximum heading error of the feedforward-predictive + PID-GA-LQR controller are 0.077 m and 0.033 rad, respectively, the control effect of the feedforward + LQR controller is relatively poor, with the maximum lateral error value reaching 0.465 m, and the maximum value of the heading error reaching 0.204 rad, and the control effect of the LQR controller is the worst among all three controllers, and the maximum lateral error has reached 0.204 rad. The maximum lateral error has reached 0.820 m, and the maximum value of heading error has reached 0.314 rad. Figure 9d shows the variation of the front wheel angle during tracking of the three controllers, from the figure, it can be observed that the feedforward-predictive + PID-GA-LQR controller outputs a smoother front wheel angle during the control process, and the overall fluctuation is the smoothest compared to the feedforward + LQR controller and the LQR controller, and Fig. 4b also shows that in the simulation condition from 2 to 3 s, the heading errors of the feedforward + LQR controller and the LQR controller change frequently, and the fluctuation is more obvious and drastic.
Generally speaking, under the 72 km/h double lane change test condition, the feedforward-predictive + PID-GA-LQR controller improves 83.4% and 83.8% in terms of the maximum error control accuracy of the lateral error and heading error compared to the feedforward + LQR controller, and 90.6% and 89.4% compared to the LQR controller. And from Fig. 9e and f, it can be known that the vehicle sideslip angle of the proposed control method in this paper is significantly reduced compared with the feedforward-LQR and LQR controllers, which is only between − 0.05° and 0.05°, and the vehicle yaw rate ranged from − 0.15 rad/s and 0.1 rad/s, which is obviously closer to the original value compared with the other two control strategies. The results indicate that the controller has more excellent tracking performance during the whole tracking process, and the stability of the vehicle is significantly improved.
Circular condition test
Circular conditions are a common scenario in automobile driving, which involves steering, acceleration and deceleration and various other driving skills, and changing the environmental factors (e.g., wind speed, friction coefficient, etc.) in the circular conditions test could be a great way to test the robustness and reliability of the path-tracking controller. Therefore, in this paper, the circular condition is used in addition to the double lane change condition for simulation testing. Considering the actual driving situation, the test speed is set to 40 km/h. The road adhesion coefficient µ is divided into two sections: 0.4 and 0.7, with road surface roughness (IRI) of 2 m/km and 6 m/km, respectively. The test results are shown in Fig. 10 below.

Circular condition test results (40 km/h).
Figure 10c demonstrates a comparative graph of the tracking performance of the three controllers for a circular condition with a speed of 40 km/h. As can be seen from the figure, all three control methods are able to track the target path better in the starting phase, yet after entering the curved path, all three controllers appear to gradually deviate from the target path, with the feedforward-predictive + PID-GA-LQR control having the relatively smallest amount of vehicle deviation. Figure 8a and b demonstrate the lateral error and heading error of the three controllers under this operating condition. It can be observed that in the straight line stage at the beginning of the target path, each of the three control methods can track the target path well, but upon entering the curved path, the feedforward + LQR controller and the LQR controller, which have not been optimised for the GA parameters and compensated for the PID steering angle, show large lateral and heading errors, and the LQR controller, which has not been added with the feedforward, shows hysteresis, but due to the low speed, the hysteresis degree is improved relative to the 72 km/h double lane change condition. From Table 6, it was observed that the maximum lateral error and the maximum heading error of the feedforward-predictive + PID-GA-LQR controller were 0.053 m and 0.043 rad, respectively, and the control effect of the feedforward + LQR controller was relatively poor, with the maximum value of the lateral error exceeding 0.108 m, and the maximum value of the heading error exceeding 0.119 rad, and the LQR controller remained the worst control effect among all three. effect is the worst, with the maximum lateral error value exceeding 0.386 m and the maximum value of heading error exceeding 0.260 rad. Figure 10d demonstrates the variation of the front wheel angle during tracking for the three controllers. It can be seen from the figure that the overall fluctuation of the front wheel steering angle output from the feedforward-predictive + PID-GA-LQR controller is smoother compared to the feedforward + LQR controller and the LQR controller during the tracking process of the curved path.
In addition, it is observed in Table 6 that the feedforward-predictive + PID-GA-LQR controller improves 51.9% and 63.8% in terms of the maximum error control accuracy of lateral error and heading error compared to the feedforward + LQR controller, and 85.4% and 85.0% compared to the LQR controller, respectively. As can be seen in Fig. 10e and f, the vehicle sidelip angle and vehicle yaw rate of the controllers designed in this paper range from − 0.01° to 0.02° and from − 0.10 rad/s to 0.05 rad/s, respectively, which are significantly reduced compared to both the feedforward-LQR and LQR controllers. The results indicate that the feedforward- predictive LQR controller with GA parameter optimisation and PID steering angle compensation achieved the most effective tracking effect and higher stability of the vehicle driving process under the 40 km/h circular path test conditions.
Conclusions
The lateral motion control problem of intelligent vehicles has been investigated for one of the core in the intelligent vehicle autopilot structure system. Above all, based on the establishment of vehicle dynamics tracking error model, according to the linear quadratic regulator (LQR) control principle, the LQR lateral motion controller for intelligent vehicles was designed, and at the meantime, the feedforward controller was designed for the existence of steady state error in the system in an aim to eliminate the steady state error. Then, a predictive controller was added to the feedforward LQR controller to eliminate system lag.Subsequently, PID steering angle compensation controller was designed to take advantage of its non-model-based advantage to directly control and correct the transverse error, compensating for the effects of steady state errors that may occur caused by model mismatch and inaccurate parameter estimation. Secondly, to address the problems of cumbersome parameter adjustment of the LQR controller and easy mismatch of the fixed parameters with the model, A path-tracking error based LQR controller is devised by exploiting the global search capability of Genetic Algorithm (GA), which optimises the control parameters of the transverse motion controller and improves the adaptivity of the control accuracy. In the end, the simulation verification and comparative analysis were conducted under two working conditions using the Carsim- Simulink joint simulation platform. The simulation results indicate that, compared with the primitive LQR controller with fixed weight values, the lateral motion controller for intelligent vehicles designed in this paper has more good path tracking accuracy and vehicle stability, as well as more excellent convergence speed, dynamic performance and response time. Considering that the controller proposed in this paper does not take into account the effect of longitudinal velocity changes, the following step will be planned to design a combination of lateral_ longitudinal coupling control to establish a more improved path-tracking control system for ntelligent vehicle.
Data availability
The data that support the findings of this study are available from the corresponding author, [Zimo Ye], upon reasonable request.
References
Giaimo, F. & Berger, C. Design criteria to architect continuous experimentation for self-driving vehicles. Arxiv preprint. arXiv:1705.05170 (2017).
Xin, M. & Minor, M. A. Variable structure backstepping control via a hierarchical manifold set for graceful ground vehicle path following. In Robotics and Automation (ICRA), 2013 IEEE International Conference on 2013.
Pereira, G. C., Wahlberg, B., Pettersson, H. et al. Adaptive reference aware MPC for lateral control of autonomous vehicles. Control Eng. Pract.https://doi.org/10.1016/j.conengprac.2022.105403 (2023).
Guo, J., Luo, Y. & Li, K. RobustH∞ fault-tolerant lateral control of four-wheel-steering autonomous vehicles. Int. J. Automot. Technol.21, 993–1000. https://doi.org/10.1007/s12239-020-0094-8 (2020).
Hwang, Y., Kang, C. M. & Kim, W. Robust nonlinear control using barrier lyapunov function under lateral offset error constraint for lateral control of autonomous vehicles. IEEE Trans. Intell. Transp. Syst.23, 1565–1571. https://doi.org/10.1109/tits.2020.3023617 (2022).
Kang, N. et al. Improved ADRC-based autonomous vehicle path-tracking control study considering lateral stability. Appl. Sci. Basel.https://doi.org/10.3390/app12094660 (2022).
Wang, Z. et al. Improved linear quadratic regulator lateral path tracking approach based on a real-time updated algorithm with fuzzy control and cosine similarity for autonomous vehicles. Electronics. https://doi.org/10.3390/electronics11223703 (2022).
Cui, Q. et al. Path-tracking and lateral stabilisation for autonomous vehicles by using the steering angle envelope. Veh. Syst. Dyn.59, 1672–1696. https://doi.org/10.1080/00423114.2020.1776344 (2021).
Li, P. et al. Polytopic LPV approaches for intelligent automotive systems: State of the art and future challenges. Mech. Syst. Signal Process.https://doi.org/10.1016/j.ymssp.2021.107931 (2021).
Guo, N. et al. A real-time nonlinear model predictive controller for yaw motion optimization of distributed drive electric vehicles. IEEE Trans. Veh. Technol.69, 4935–4946. https://doi.org/10.1109/tvt.2020.2980169 (2020).
Tang, F. & Li, C. Intelligent vehicle lateral tracking control based on multiple model prediction. AIP Adv.https://doi.org/10.1063/1.5141506 (2020).
Du, G. et al. Hierarchical motion planning and tracking for autonomous vehicles using global heuristic based potential field and reinforcement learning based predictive control. IEEE Trans. Intell. Transp. Syst.24, 8304–8323. https://doi.org/10.1109/tits.2023.3266195 (2023).
Li, Y. et al. Intelligent PID guidance control for AUV path tracking. J. Cent. South. Univ.22, 3440–3449. https://doi.org/10.1007/s11771-015-2884-0 (2015).
Shauqee, M. N., Rajendran, P. & Suhadis, N. M. An effective proportional-double derivative-linear quadratic regulator controller for quadcopter attitude and altitude control. Automatika62, 415–433. https://doi.org/10.1080/00051144.2021.1981527 (2021).
Kalman, R. E. Contributions to the theory of optimal control (1960).
Gokcek, C., Kabamba, P. T. & Meerkov, S. M. SLQR/SLQG: An LQR/LQG theory for systems with saturating actuators. IEEE (2000).
Gokcek, Cevat, Kabamba, et al. An LQR/LQG theory for systems with saturating actuators. IEEE Transactions on Automatic Control 2001.
Amer, N. H. & Zamzuri, H. Modelling and Control strategies in path tracking control for autonomous ground vehicles: A review of state of the art and challenges. J. Intell. Robot. Syst.86, 1–30 (2017).
Falcone, P. et al. Predictive active steering control for autonomous vehicle systems. IEEE Trans. Control Syst. Technol.15, 566–580 (2007).
Snider, J. M. Automatic Steering Methods for Autonomous Automobile Path Tracking. Robotics Institute.
Kapania, N. R. & Gerdes, J. C. Design of a feedback-feedforward steering controller for accurate path tracking and stability at the limits of handling. Veh. Syst. Dyn.53, 1687–1704. https://doi.org/10.1080/00423114.2015.1055279 (2015).
Xu, S., Peng, H. & Design,. Design, analysis, and experiments of preview path tracking control for autonomous vehicles. IEEE Trans. Intell. Transp. Syst.21, 48–58. https://doi.org/10.1109/tits.2019.2892926 (2020).
Li, Y. Dynamic system optimal performances of shared autonomous and human vehicle system for heterogeneous travellers. Math. Comput. Model. Dyn. Syst.26, 481–499. https://doi.org/10.1080/13873954.2020.1792509 (2020).
Cheng, S. et al. Longitudinal collision avoidance and lateral stability adaptive control system based on MPC of autonomous vehicles. IEEE Trans. Intell. Transp. Syst.21, 2376–2385. https://doi.org/10.1109/tits.2019.2918176 (2020).
Katebi, J. et al. Developed comparative analysis of metaheuristic optimization algorithms for optimal active control of structures. Eng. Comput.36, 1539–1558. https://doi.org/10.1007/s00366-019-00780-7 (2020).
Takemura, N. et al. A path-planning method for human-tracking agents based on long-term prediction. IEEE Trans. Syst. Man. Cybern Part. C Appl Rev.42, 1543–1554. https://doi.org/10.1109/tsmcc.2012.2203801 (2012).
Verma, B. & Padhy, P. K. Robust fine tuning of optimal PID controller with guaranteed robustness. IEEE Trans. Ind. Electron.67, 4911–4920. https://doi.org/10.1109/tie.2019.2924603 (2020).
Li, H. et al. Safety research on stabilization of autonomous vehicles based on improved-LQR control. AIP Adv.https://doi.org/10.1063/5.0078950 (2022).
Lipowski, A. & Lipowska, D. Roulette-wheel selection via stochastic acceptance. Phys. A Stat. Mech. Appl.391, 2193–2196. https://doi.org/10.1016/j.physa.2011.12.004 (2012).
Acknowledgements
All the authors would like to express our gratitude to all those who helped us improve this work.
Funding
National Natural Science Foundation of China, 51875494, Zhu’an Zheng; Natural Science Research of Jiangsu Higher Education Institutions of China, 19KJB580019, Zhu’an Zheng; Key University Science Research Project of Jiangsu Province, SJCX20_1353, Zhu’an Zheng; Yancheng institute of Technology Postgraduate Innovation Programme Project, SJCX23_XZ027, Zimo Ye.
Author information
Authors and Affiliations
Contributions
Author contribution: Conceptualization, Z.A.Z.; methodology, Z.A.Z.; software, Z.M.Y.; formal analysis, Z.M.Y.; Investigation, Z.M.Y.; resources, Z.A.Z.; data curation, X.Y.Z.; writing—original draft preparation, Z.M.Y.; writing—review and editing, Z.A.Z.; project administration, Z.M.Y.; funding acquisition, Z.A.Z., Z.M.Y.; Supervision, Z.A.Z.; Visualization, Z.M.Y. and X.Y.Z.; All authors have read and agreed to the published version of the manuscript.
Corresponding author
Ethics declarations
Competing interests
The authors declare no competing interests.
Additional information
Publisher’s note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
Open Access This article is licensed under a Creative Commons Attribution-NonCommercial-NoDerivatives 4.0 International License, which permits any non-commercial use, sharing, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons licence, and indicate if you modified the licensed material. You do not have permission under this licence to share adapted material derived from this article or parts of it. The images or other third party material in this article are included in the article’s Creative Commons licence, unless indicated otherwise in a credit line to the material. If material is not included in the article’s Creative Commons licence and your intended use is not permitted by statutory regulation or exceeds the permitted use, you will need to obtain permission directly from the copyright holder. To view a copy of this licence, visit http://creativecommons.org/licenses/by-nc-nd/4.0/.
About this article

Cite this article
Zheng, Za., Ye, Z. & Zheng, X. Intelligent vehicle lateral control strategy research based on feedforward + predictive LQR algorithm with GA optimisation and PID compensation. Sci Rep 14, 22317 (2024). https://doi.org/10.1038/s41598-024-72960-5
Received:
Accepted:
Published:
Version of record:
DOI: https://doi.org/10.1038/s41598-024-72960-5
Keywords
This article is cited by
-
Intelligent vehicle tracking control with real-time tire cornering stiffness identification
Journal of the Brazilian Society of Mechanical Sciences and Engineering (2026)
