
Abstract
In this work, numerous rogue wave solution strategy (MRWSS) agreeing to the Hirota bilinear hypothesis is utilized. The said strategy to build different soliton wave solutions for the generalized Hirota-Satsuma-Ito (GHSI) condition is considered. These numerous soliton wave solutions incorporate first-order, second-order, third-order, and fourth-order waves solutions and so on, which are all depending on the starting theory of chosen capacities. For the lump solution with one most extreme or least esteem, the properties of the Hessian lattice are examined. Besides, the arrangements are contained the lump-two kink arrangements, cross-kink wave arrangements, periodic wave arrangements, and periodic-kink wave arrangements. The various classes of arrangements are gotten. We make utilize of the direct superposition procedure to find out N-soliton wave arrangements to the said condition. The appropriateness and viability of the obtained arrangements is detailed through the reenactment comes about within the shape of 3-D, density, and 2-D charts. The gotten comes about in this work are anticipated to open modern viewpoints for the traveling wave theory.
Similar content being viewed by others


Introduction
The (1+1)-dimensional Hirota-Satsuma shallow water wave (HSSWW) equation firstly introduced by Hirota and Satsuma as a demonstrate condition portraying the unidirectional engendering of shallow water waves1 as follows
by employing the below bilinear transformation is arisen as
Then, Eq. (1) converted to the bilinear frame as follows:
Also, the (2+1)-dimensional HSSWW equation is presented2 as
by help of the following bilinear operation
Eq. (5) changed to the bilinear model can be seen as follows
Moreover, the (2+1)-dimensional generalized Hirota-Satsuma-Ito shallow water wave (GHSISWW) equation will be read3 as
by exploiting the following bilinear relation
also, Eq. (7) changed to the bilinear model including
A few later investigates moreover illustrate the strikingly high abundance of lump arrangements to nonlinear partial differential conditions (see, e.g., multi-kink waves4, the elastic interaction solution between a line soliton and a periodic soliton5and inelastic interactions among the multi-front kink waves6). A new class of Hirota-Satsuma-Ito type equations involving general second-order derivative terms was conducted to require having lump solutions by Ma7. The Lie symmetry technique has been applied to obtain certain analytic invariant solutions for the generalized Hirota-Satsuma-Ito equations8.
For the case of spatially nonlinear frameworks, bounty of known explanatory arrangements exist. On the other hand, these basic frameworks are frequently considered to create and test unused numerical strategies by mathematicians. Be that as it may, in numerous viable issues, the properties of the materials such as the diffusivity and the thickness can broadly shift within the framework, hence we accept that modern comes about for these frameworks are important. On the other hand, there are a huge number of numerical strategies to illuminate the nonlinear models of equation, including trigonometric quadrature rules9, the (2+1) dimensional Chaffee-Infante equation10, wave structures to the modified Schrödinger’s equation11, conventional soliton and bound-state soliton12, and generalization of regularized long-wave equation13. Nonlinear models appear in a range of fields, starting from classical hydrodynamics to advanced gravitational waves, including soliton molecules14, bistable origami flexible gripper15, the neural networks method16, and several other systems due to their interesting propagation as well as works in17,18.
The foremost broadly known ones have a place to the family of the numerical or explanatory plans counting the multimodal learning paradigm method19, multimodal hybrid parallel method20, the neural architecture scheme21, the accurate automated extraction method22, and improved BPNN technique23. Apart the solitons arise a unique balance between dispersive and nonlinear effects in a given medium is primarily described by integrable partial differential equations including the homotopy analysis technique24, the homotopy perturbation scheme25, the \(tan(\phi /2)\)-expansion scheme26,27, the Hirota’s bilinear scheme28,29,30,31, the generalized G-expansion method32, the modulation instability analysis33, the cubic-quintic nonlinear Helmholtz equation34, the finite difference method35 and the real-time subsurface scattering technique36. Further, the exploration of dynamics of nonlinear waves has attracted renowned interest in diverse physical contexts, which imparts various phenomena associated with characteristics of solitons37,38,39,40,41. The soliton solutions were investigated in Refs42,43,44. Recent research endeavors have concentrated on uncovering equations and problems for the nonlinear models, which extends to the cases involving network traffic detection, generalized matrix completion, nonlinear descriptor systems, quasi-Z-source inverter, and fuzzy logic45,46,47,48,49.
Also, in continuation we will study the multiple rogue waves for determining the multiple soliton solutions in which refer to valuable work in Ref50. In 2011, Ma and Fan introduced linear superposition principle to get multiple wave solutions of the Hirota bilinear equations51 and it has been applied to solve NLEEs including a combined equation with three types of nonlinear terms52, (2+1)-dimensional Hirota-Satsuma-Ito equations53 in recent.
Also, the Hirota bilinear method is used to obtain multiple soliton interaction for nonlinear Schrödinger equation with dispersion and self phase modulation54. Ma in two valuable researches investigated and analyzed N-soliton solutions and the Hirota conditions in (1+1)-dimensions55, and the B-type Kadomtsev-Petviashvili equation under general dispersion relations56.
The bilinear forms and two families of the N-soliton solutions were constructed to a generalized Whitham-Broer-Kaup-Boussinesq-Kupershmidt system57. The hetero-Backlund transformations has been applied to an extended coupled (2+1)-dimensional Burgers system58. The auto-Bäcklund transformation via a noncharacteristic movable singular manifold, certain families of the solitonic solutions has been used to variable-coefficient generalized forced-perturbed Korteweg-de Vries (KdV)-Burgers equation59. Multi-pole solitons in an inhomogeneous multi-component nonlinear optical medium have been applied60. The (3+1)-dimensional KdV-Calogero-Bogoyavlenskii-Schif equation in a fluid was investigated using the truncated Painlevé expansion61.
Solving nonlinear evolution equations analytically can be challenging due to the presence of nonlinear terms, which makes the equations difficult to solve exactly including the classical a-Weyl theorem62, the iterated function system63, a hydroxyethyl group64, the tangential force effects on the vibration65 and excellent microwave absorption method66. Nevertheless, there are several methods that can be used to obtain analytical solutions for some types of nonlinear evolution equations such as the sacrifice of mechanical strength or thermal stability67, controlling the reaction temperature68, a robust observer method47 an improved transient sub-domain analytical model69 and molecular dynamic computations70.
We expressed clearly that others’ published papers do not cover our work and results available in the paper is really new.
The rest of this paper is structured as follows: the multiple rouge waves technique is summarized in Section 2. In Section 3, the MRWSM is applied to construct the multiple wave solutions to the generalized Hirota-Satsuma-Ito equation. In Section 4, the interaction one soliton with another types are presented to verify and obtaining the analytic solutions. In sections 5 and 6, N-soliton and multiple wave solutions of the GHSISWW equation are concluded using the Hirota bilinear scheme and linear superposition technique, and also, the linear superposition technique is established when \(f=\sum _{i=1}^{N}\phi _if_i\) with each exponential wave \(f_i\) satisfies the corresponding nonlinear dispersion relation. Finally, we give the conclusion in Section 7.
Multiple rouge-wave solution method
To think about the gHSI condition (7) and by applying the numerous arrangements by utilizing the Hirota operator, the taking after steps will be explored as:
Step 1. Let a nonlinear PDE with the following format
With a simple transformation we get to below relation as
in which f is a function of some variables.
Step 2. Extracting the relation (11), one becomes
where \(\xi =x-ct\) and c is the free value. Thereby, the D-operator is mentioned in the below shape
where the vectors \(\varsigma =(\varsigma _1,\varsigma _2)=(\xi ,y)\), \(\varsigma '=(\varsigma '_1,\varsigma '_2)=(\xi ',y')\) and \(\beta _1,\beta _2\) are specified values.
Step 3. Assume
with
\(\chi _0= 1, \chi _1=p_0= s_0= 0\), where \(a_{r,l}, b_{r,l}, c_{r,l} (r, l \in \{0, 2, 4, . . . ,\tau (\tau +1)\})\) and \(\theta , \delta\) are the real parameters. The coefficients \(a_{r,l}, b_{r,l}, c_{r,l}\) can be obtained, and the articular values \(\theta , \delta\) are employed to search the wave center.
Step 4. Substituting (15) into (14) and after simple algebraic computations get to value \(a_{r,l}, b_{r,l}, c_{r,l}\).
Step 5. Joining the parameters of \(a_{r,l}, b_{r,l}, c_{r,l}\) into (13) reach the solutions to the gHSI equation (7), which are retrieved to find rogue wave (RW) solutions.
Rogue wave solutions of a generalized HSI equation
Choice I: First-order RW
The one-wave function according to \(\xi =x-ct\) for Eq. (7) will be converted in the following:
in which c is unarticulated value and through inserting the below bilinear relation as
Eq. (16) mentioned to the bilinear model as follows
with
By selecting \(n=0\) at (14), thereinafter (14) will be presented as
For simplicity select \(a_{2,0}= 1\). Putting (19) into (18), the nonlinear algebraic structure will be reached as
Solving Eq. (20), one get
Eq. (19) will be shown as
by supposing \(\delta _1\delta _5\ne 0,\) and \(\delta _{{1}}\delta _{{2}}-\delta _{{3}}\delta _{{4}}\ne 0\), the first solution of Eq. (7) is determined as
The following limit properties is available here as
By selecting the convenient values, Fig. 1 and Fig. 2 are designed. With a straightforward computation can get it that the lump has two basic focuses, but we quest as it were one point \((\xi _1, y_1) =\left( {\frac{\theta \, \left( \delta _{{1}}\delta _{{2}}-\delta _{{3}}\delta _{{ 4}} \right) + \sqrt{3\,\delta _{{3}} \left( \delta _{{1}}\delta _{{2}}- \delta _{{3}}\delta _{{4}} \right) }}{\delta _{{1}}\delta _{{2}}-\delta _{{ 3}}\delta _{{4}}}} , \delta \right)\). At the point \((\xi _1, y_1)\), the second order derivative can be found71 within the taking after
If \(\delta _{{1}}\delta _{{2}}-\delta _{{3}}\delta _{{4}}>0, \delta _3>0\), and \(\Delta _1>0\), then the point \((\xi _1, y_1)\) is extreme point. According to above treatment, the point \((\xi _1, y_1)\) is a maximum point at which \(\Psi _{max}\). By utilizing diverse \(\delta _1,\delta _2,\delta _3\) and \(\delta _4\) values, the lump solution \(\Psi (\xi ,y)\) has one maximum value including \(\Psi _{\max }=\frac{1}{3}{\frac{2\, \sqrt{3} \sqrt{\delta _{{3}} \left( \delta _{{1}}\delta _{{2}}-\delta _{{3}}\delta _{{4}} \right) }+3\,\delta _{{3}}\Psi _{{0}}}{ \delta _{{3}}}}\).

Outlook of the lump wave solution (23) in \(\delta =\theta =2,\alpha =1.2, \delta _1=2,\delta _2=3, \delta _3=1,\delta _4=2, \delta _5=1, \Psi _0= 1\).

Outlook of the lump wave solution (23) in \(\delta =\theta =-2,\alpha =1.2, \delta _1=2,\delta _2=3, \delta _3=1,\delta _4=2, \delta _5=1, \Psi _0= 1\).
Choice II: The second-order RW
The two-wave form concurring to \(xi=x-ct\) and with catching \(n=1\) at (refe4), at that point Eq. (7) will be changed over as the taking after shape
For simplicity we put \(a_{6,0}= 1\). After plugging (26) into (18) and solve the related system one obtain the following findings:
in which \(b_{{2,0}}\) and \(c_{{2,0}}\) are the undesignated values. Hence, the second-order RW solutions of Eq. (7) can be mentioned as
in which \(\mathfrak {f}_2(\xi ,y; \theta ,\delta )\) is determined in Eq. (26). The following limit properties is available here as
By choice the convenient values, Fig. 3 and Fig. 4 are designed. In Fig. 3 the rogue wave has one center \((\delta ,\theta )=(1, 5)\), while in Fig. 4 the rogue wave has one center \((\delta ,\theta )=(-2, -3)\).

Outlook of the two lump wave solution (28) in \(\delta =1, \theta =5,c_{2,0}= -2, b_{2,0}= 3, \delta _1=2,\delta _2=3, \delta _3=1,\delta _4=2, \delta _5=1, \Psi _0= 1\).

Outlook of the two lump wave solution (28) in \(\delta =-2, \theta =-3, c_{2,0}= -2, b_{2,0}= 3, \delta _1=2,\delta _2=3, \delta _3=1,\delta _4=2, \delta _5=1, \Psi _0= 1\).
Choice III: The third-order RW
The three-wave form according to \(\xi =x-dt\) and with considering \(n=2\) at (14), at the same time Eq. (7) will be reached in the following form
where \(\chi _1(\xi ,y)=(\xi -\theta )^2+{\frac{\delta _{{1}}\delta _{{2}}-\delta _{{3}}\delta _{{4}}}{ \delta _{{1}}\delta _{{5}}}}(y-\delta )^2+{\frac{3\delta _{{3}}}{\delta _{{1}}\delta _{{2}}-\delta _{{3 }}\delta _{{4}}}}\). For simplicity we choice \(a_{12,0}= 1\). Substituting (30) into (18) and solve the related framework one get the underneath comes about:
in which \(b_{{4,2}}\) and \(c_{{4,2}}\) are unfound values. And so, the three-order RW arrangements of Eq. (7) can be spoken to as
where \(\mathfrak {f}_3(\xi ,y; \theta ,\delta )\) is defined in Eq. (26). The following limit properties is available here as
By choice the right amounts of parameters, the realistic representation of three-lump soliton wave arrangements are advertised in Fig. 5, Fig. 6 and Fig. 7 counting 3D graph, form graph, density graph, and 2D graph when three spaces get up at cases (\(y=-2,-1.5,-1.2\)), (\(y=1.3,1.5,2\)), and (\(y=-1,-0.2,0.5\)), respectively. In Fig. 5 the rogue wave has one center \((\delta ,\theta )=(-1, 5)\) and in Fig. 6 the rogue wave has one center \((\delta ,\theta )=(1, 5)\), while in Fig. 7 the rogue wave has one center \((\delta ,\theta )=(0, 0)\).

Outlook of the three lump wave solution (32) in \(\delta =-1, \theta =-15, c_{6,0}= -2, b_{6,0}= 3, \delta _1=2,\delta _2=3, \delta _3=1,\delta _4=2, \delta _5=1, \Psi _0= 1\).

Outlook of the three lump wave solution (32) in \(\delta =1, \theta =5, c_{6,0}= -2, b_{6,0}= 3, \delta _1=2,\delta _2=3, \delta _3=1,\delta _4=2, \delta _5=1, \Psi _0= 1\).

Outlook of the three lump wave solution (32) in \(\delta =0, \theta =0, c_{6,0}= -2, b_{6,0}= 3, \delta _1=2,\delta _2=3, \delta _3=1,\delta _4=2, \delta _5=1, \Psi _0= 1\).
Set IV: The fourth-order RW
The fourth-wave frame according to \(\xi =x-ct\) and with considering \(n=3\) at (14), next Eq. (7) will be converted in the following form
with
For simplicity we put \(a_{20,0}= 1\). Plugging (34) into (18) and solve the mentioned system one become the following results:
in which \(R_1\) solves the relation \(531441\,{R_{{1}}}^{5}c_{{2,0}}-207025\,c_{{2,10}}=0\) and \(a_{{18,0}}, b_{{0,12}}, c_{{2,0}}, c_{{2,10}}\) are arbitrary values. So, the fourth-order rogue wave solutions of Eq. (7) can be reached by employing Eq. (17) as follows
where \(\mathfrak {f}_4(\xi ,y; \theta ,\delta )\) is given in Eq. (34). The following limit properties is available here as
By choice the suitable values, Fig. 8, Fig. 9 and Fig. 10 are designed. In Fig. 8 the RW has one center \((\delta ,\theta )=(1, 7)\), provided in Fig. 9 the RW has as \((\delta ,\theta )=(-3, -3)\) and eventually in Fig. 10 the RW has as \((\delta ,\theta )=(0, 0)\).

Outlook of the four lump wave solution (36) in \(\delta =1, \theta =7, c_{2,0}= 1, c_{2,10}= 1, \delta _4=2, \delta _5=2, \Psi _0= 1\).

Outlook of the four lump wave solution (36) in \(\delta =-3, \theta =-3, c_{2,0}= 1, c_{2,10}= 1, \delta _4=2, \delta _5=2, \Psi _0= 1\).

Outlook of the four lump wave solution (36) in \(\delta =0, \theta =0, c_{2,0}= 1, c_{2,10}= 1, \delta _4=2, \delta _5=2, \Psi _0= 1\).
Interaction one soliton wave with another types
Lump-two kink wave solutions
In the present section, the lump with two kink wave solution involving compound of three functions for the (2+1)-dimensional generalized HSI model via applying the bilinear technique is presented in the following shape:
The amounts \(\alpha _l, \beta _l, \varepsilon _l, \epsilon _l (l=1,...,4)\) are real values to be computed. Via putting (38) into (8) a system involving thirty one nonlinear equations has been concluded. Via solving the nonlinear system the determined coefficients will be got as below issues:
Option I:
The solution is given as follows:
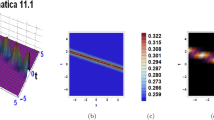
By taking \(\Psi _1\) in solution (40) as an instance, with the hypothesis that x, y are values and \(\theta <0\) in \(e^{\alpha _l x+\beta _l y+\theta t+\epsilon _l}, l=3,4\). And so, if \(\tau _1^2+\tau _2^2+e^{\tau _3}+e^{\tau _4}+\epsilon _5\rightarrow \infty\), the lump and 2-kink kind solutions \(u\rightarrow 0\), when \(t\rightarrow -\infty\), in this case the exponential expression \(e^{\tau _3}+e^{\tau _4}\) is the dominant one and deprive the existence of lump frame. Insomuch the function \(\tau _1^2+\tau _2^2+\epsilon _5\) is the dominant expression and \(\Psi \rightarrow \frac{2\tau _2\beta _2}{\tau _1^2+\tau _2^2+\epsilon _5}\) until \(t\rightarrow +\infty\). To the extent that as time approaches zero \(t\rightarrow 0\), the lump frame trends to emerge and prosper. Figure. 11 presents the 3-D graph and density graph of \(\Psi\) with determined amounts in Eq. (40).

The plot of lump-2 kink (40) at \(\delta _1= 2, \delta _2= 3, \delta _3= 1, \delta _4= 1, \delta _5= 3, \varepsilon _1= 1.5, \varepsilon _2= 2, \varepsilon _3= 1, \varepsilon _4= 2, \epsilon _1= 1, \epsilon _2= 1.5, \epsilon _3= 3, \epsilon _4= 1, \epsilon _5= 1, y = 1\).
Option II:
The solution is given as follows:
Cross-kink wave solutions
Hither, the cross-kink wave solution involving compound of three functions for the (2+1)-dimensional generalized HSI equation by employing the bilinear technique is presented in the following model:
The amounts \(\alpha _i, \beta _i, \varepsilon _i, \epsilon _i (i=1,2)\) are real values to be computed. By substituting (43) into (8) a system involving five nonlinear equations has been concluded. Via solving the nonlinear system the determined coefficients will be got as below issues:
Choice I:
The solution is given as follows:
By taking \(\Psi _1\) in solution (45), if \(\sinh (\tau _1)+\sin (\tau _2)\rightarrow \infty\), the cross-kink type solutions \(\Psi \rightarrow 2\alpha _1\), at the time of \(t\rightarrow \pm \infty\), in this case the exponential term \(\sinh (\tau _1)\) is the dominant one and deprive the existence of periodic property. Figure 12 shows the 3-D graph and density graph of \(\Psi\) with determined amounts in Eq. (45).

The plot of cross-kink (45) at \(\delta _1= 2, \delta _4= 1, \alpha _1=\beta _1=2, \alpha _2=\beta _2=1, \varepsilon _1= 1.5, \varepsilon _2= 2, \epsilon _1= 1, \epsilon _2= 1.5, y = 1\).
Choice II:
The solution is given as follows:
Choice III:
The solution is given as follows:
Choice IV:
The solution is given as follows:
Option V:
The solution is given as follows:
By taking into consideration \(\Psi _5\) in solution (53), if \(\sinh (\tau _1)+\sin (\tau _2)\rightarrow \infty\), the cross-kink type solutions \(\Psi \rightarrow \frac{2\sqrt{3}\alpha _2}{3}\), at the time of \(t\rightarrow \pm \infty\), in this case the exponential term \(\sinh (\tau _1)\) is the dominant one and deprive the existence of periodic property. Figure. 13 shows the 3-D plot and density plot of \(\Psi\) with determined amounts in Eq. (53).

The plot of cross-kink (53) at \(\delta _1= 2, \delta _4= 1, \alpha _2=1, \varepsilon _1= 2, \epsilon _1= 1, \epsilon _2= 2, y = 1\).
Periodic-kink wave solutions
Hither, the periodic-kink wave solution involving compound of three functions for the (2+1)-dimensional generalized HSI equation by handling the bilinear technique is presented as below model:
The amounts \(\alpha _i, \beta _i, \varepsilon _i, \epsilon _i (i=1,2)\) are real values to be computed. By appending (54) into (8) a system containing five nonlinear equations has been reached. Through solving the nonlinear system the determined coefficients will be got as below issues:
Choice I:
The solution is given as follows:
By taking into consideration \(\Psi _1\) in solution (56), if \(\cosh (\tau _1)+\cos (\tau _2)\rightarrow \infty\), the periodic-kink type solutions \(\Psi \rightarrow 2\alpha _1\), at the time of \(t\rightarrow \pm \infty\), in this form the exponential expression \(\cosh (\tau _1)\) is the dominant one and deprive the existence of periodic property. Figure 14 presents the three-D graph and density graph of \(\Psi\) with determined parameter settings in Eq. (56).

The plot of periodic-kink (56) at \(\delta _1= 2, \delta _4= 1, \alpha _1=\beta _1=2, \alpha _2=\beta _2=1, \varepsilon _1= 1.5, \varepsilon _2= 2, \epsilon _1= 1, \epsilon _2= 1.5, y = 1\).
Choice II:
The solution is given as follows:
Choice III:
The solution is given as follows:
Option IV:
The solution is given as follows:
Option V:
The solution is given as follows:
By considering \(\Psi _5\) in solution (64), if \(\cosh (\tau _1)+\cos (\tau _2)\rightarrow \infty\), the cross-kink type solutions \(\Psi \rightarrow -2\alpha _1\), at the time of \(t\rightarrow \pm \infty\), in this form the exponential expression \(\cosh (\tau _1)\) is the dominant one and deprive the existence of periodic property. Figure 15 shows the three-D graph and density graph of \(\Psi\) with determined parameter settings in Eq. (64).

The plot of periodic-kink (64) at \(\alpha _1=\frac{2}{3}, \beta _1=1, \beta _2=-2, \varepsilon _1= 2, \varepsilon _2=1, \epsilon _1= 1, \epsilon _2= 2,\epsilon _3=2, y = 1\).
Kink-dark wave solutions
Here, the kink-dark wave solution involving compound of three functions for the (2+1)-dimensional generalized HSI equation because of applying the bilinear technique is presented as below case:
The amounts \(\alpha _i, \beta _i, \varepsilon _i, \epsilon _i (i=1,2,3)\) are real values to be computed. After plugging (65) into (8) a system involving forty four nonlinear equations the regarding solutions has been represented. Through solving the nonlinear system the determined coefficients will be received as below issues:
Choice I:
The solution is given as follows:
Option II:
The solution is given as follows:
By taking into consideration \(\Psi _2\) in solution (69), if \(\exp (\tau _1)+\exp (-\tau _1)+\tanh (\tau _2)+\tan (\tau _3)+\epsilon _4\rightarrow \infty\), the kink-dark type solutions \(\Psi \rightarrow 0\), at the time of \(t\rightarrow \pm \infty\), in this form the exponential expression \(\tanh (\tau _2)\) is the dominant one and deprive the existence of \(\tan (\tau _3)\) property. Figure 16 reveals the three-D graph and density graph of \(\Psi\) with determined values in Eq. (69).

The plot of kink-dark (69) at \(\delta _1= 2, \delta _4= 1, \alpha _1=\frac{2}{3}, \beta _1=1,\beta _2=2, \beta _3=3, \varepsilon _1= 2, \varepsilon _2= 1, \epsilon _1= 1, \epsilon _2= 2,\epsilon _3=3,\epsilon _4=4, x = 1\).
N-soliton treatment
Through the solution f of bilinear model (9) with respect to \(\phi\) we have,
Next, by appending expression (70) into bilinear equation (9) and decollating at the second power of \(\phi\), one becomes
and
Based on equation (71), the solution with below form is extracted
where \(\eta _i=k_a(x+m_ay+\omega _at)+\eta _{i0}, k_a,m_a,\omega _a, (1\le a\le N)\) are nonzero values and \(\eta _{i0}\) is optional amount. Appending \(f^{(1)}=\exp (\eta _a)\) into equation (71), we acquire \(\omega _a=-{\frac{\delta _{{5}}{m_{{a}}}^{2}+\delta _{{3}}m_{{a}}+\delta _{{2}}}{ \delta _{{1}}m_{{a}}+{k_{{a}}}^{2}+\delta _{{4}}}}\). Afterwards, based on the superposition technique of findings of linear equations, \(f^{(1)}=\exp (\eta _a)+\exp (\eta _b)\) where \(\eta _b=k_b(x+m_by+\omega _bt)+\eta _{b0}, (1\le a\le b\le N)\) is also the solution of equation (71) in order that \(f^{(2)}=\exp (\eta _a+\eta _b+\Omega _{ab})\) is the result of equation (72). Imposing \(f^{(1)}=\exp (\eta _a)+\exp (\eta _b)\) and \(f^{(2)}=\exp (\eta _a+\eta _b+\Omega _{ab})\) into equation (72) where \(\exp (\Omega _{ab})\) is nonzero value and exploiting the characters of the Hirota bilinear scheme to exponential functions, one arises
where \(H=\delta _{{4}} \left( k_{{a}}-k_{{b}} \right) \left( \omega _{{a}}-\omega _{{b}} \right) +\delta _{{5}} \left( m_{{a}} -m_{{b}} \right) ^{2}, G=\delta _{{4}} \left( k_{{a}}+k_{{b}} \right) \left( \omega _{{a}}+\omega _{{b}} \right) +\delta _{{5}} \left( m_{{a}} +m_{{b}} \right) ^{2}\) and g(t) is function of t and \(\lambda , k_a, m_a, \omega _a, (1\le a\le b\le N)\) are nonzero constants. The N-soliton form of bilinear equation (9), can be expressed in the following shape
where \(\eta _a=k_a\left( x+m_ay-{\frac{\delta _{{5}}{m_{{a}}}^{2}+\delta _{{3}}m_{{a}}+\delta _{{2}}}{ \delta _{{1}}m_{{a}}+{k_{{a}}}^{2}+\delta _{{4}}}} t\right) +\eta _{a0}, (1\le a\le b\le N)\).
Handeling the linear superposition technique
According to the51 and by utilizing \(u=2(\ln f)_{x}\), the bilinear form of Eq. (7) will be concluded as:
In order to find N-wave solution, let
After plugging f (76) into bilinear equation (75), which represents the regarding solution of below equation
Consequently the comparing arrangements are extricated, working in much the same line:
Case I:
Case II:
Case III:
where \(\rho\) and \(\tau\)are the free amounts. Accordingly by the linear superposition technique expressed in42,43, the generalized Hirota-Satsuma-Ito equation (7) has the following N-wave solutions, respectively, as:
where \(\phi _i\) is a free value.
Multiple wave solution
According to linear superposition technique (52,53), the corresponding polynomial of (9) expresses,
Introducing N-wave function
where \(\widehat{f_i}=\exp (\vartheta _i)=\exp (k_ix+m_iy+\omega _it), \ 1\le i\le N\), and \(k_i,m_i,\omega _i\) are nonzero constants. Inserting \(f=\sum _{i=1}^{N}\phi _i\widehat{f_i}\) into bilinear equation (9), we obtain
Therefore, f solves the bilinear model (9) if and only if \(P(k_i-k_j,m_i-m_j,\omega _i-\omega _j)=0\) in order that the N-wave solutions condition can be acquired
By comparing the power of \(k_i,k_j,m_i,m_j,\omega _i,\omega _j\) we have (I) \(m_i=\rho k_i,\,\ \omega _i=-{\frac{ \left( {\rho }^{2}\delta _{{5}}+\rho \,\delta _{{3}}+\delta _{{2} } \right) k_{{i}}}{\rho \,\delta _{{1}}+{k_{{i}}}^{2}+\delta _{{4}}}},\)\(m_j=\rho k_j,\,\ \omega _j=-{\frac{ \left( {\rho }^{2}\delta _{{5}}+\rho \,\delta _{{3}}+\delta _{{2} } \right) k_{{j}}}{\rho \,\delta _{{1}}+{k_{{j}}}^{2}+\delta _{{4}}}}\), (II) \(m_i=\rho k_i^2,\,\ \omega _i=-{\frac{ \left( {\rho }^{2}\delta _{{5}}{k_{{i}}}^{2}+\rho \,\delta _{{3} }k_{{i}}+\delta _{{2}} \right) k_{{i}}}{\rho \,\delta _{{1}}k_{{i}}+{k_{{ i}}}^{2}+\delta _{{4}}}}\), \(m_j=\rho k_j^2,\,\ \omega _j=-{\frac{ \left( {\rho }^{2}\delta _{{5}}{k_{{j}}}^{2}+\rho \,\delta _{{3} }k_{{j}}+\delta _{{2}} \right) k_{{j}}}{\rho \,\delta _{{1}}k_{{j}}+{k_{{j}}}^{2}+\delta _{{4}}}}\) and (III) \(m_i=\tau \,{k_{{i}}}^{2}+\rho \,k_{{i}},\,\ \omega _i=-{\frac{k_{{i}} \left( {\tau }^{2}\delta _{{5}}{k_{{i}}}^{2}+\tau \,k_{{ i}} \left( 2\,\rho \,\delta _{{5}}+\delta _{{3}} \right) +{\rho }^{2} \delta _{{5}}+\rho \,\delta _{{3}}+\delta _{{2}} \right) }{\tau \,\delta _{{ 1}}k_{{i}}+\rho \,\delta _{{1}}+{k_{{i}}}^{2}+\delta _{{4}}}}\), \(m_j=\tau \,{k_{{j}}}^{2}+\rho \,k_{{j}},\,\,\,\ \omega _j=-{\frac{k_{{j}} \left( {\tau }^{2}\delta _{{5}}{k_{{j}}}^{2}+\tau \,k_{{j}} \left( 2\,\rho \,\delta _{{5}}+\delta _{{3}} \right) +{\rho }^{2} \delta _{{5}}+\rho \,\delta _{{3}}+\delta _{{2}} \right) }{\tau \,\delta _{{ 1}}k_{{j}}+\rho \,\delta _{{1}}+{k_{{j}}}^{2}+\delta _{{4}}}}\). Accordingly, after plugging it into equation (87) the N-wave solutions condition, one becomes
Also, the N-wave solutions can be expressed in the below issues:
Remark 1
We used the multiple rogue wave solution method based on the Hirota bilinear theory and also constructed the abundant multiple soliton wave solutions for the generalised Hirota-Satsuma-Ito equation. The solutions obtained are applicable to ocean waves, so that they can be used in more widely applicable nonlinear models. In addition, the multiple soliton waves can be applied to particular ocean waves in this study, and some nonlinear models that will be which will be studied in the near future. The applicability and effectiveness of the solutions obtained are demonstrated by the numerical numerical results in the form of 3-D, density and 2-D plots. Finally, the obtained results show that the proposed multiple rogue wave solution method is simple, straightforward, and effective, which is expected to bring a light to the investigate the ocean wave theory. This work in comparison with already published papers have applicable to constructive findings in nonlinear sciences as particular in the ocean area. A soliton is a nonlinear solitary wave with the additional property that the wave retains its permanent structure, even after interacting with another soliton. Solitons are solitary waves that maintain their shape and speed while propagating with constant velocity.
Conclusion
In this paper, we investigate the (2+1)-dimensional generalized Hirota-Satsuma-Ito equation, and obtain its abundant multiple wave solutions in the form of lump, two and three lump soliton wave, kinky dark, periodic-dark, bright-dark, solitary wave solutions, periodic wave solution, etc by applying the Hirota operator. The applicability and effectiveness of the found solutions are shown by the numerical results in the form of 3-D, density, and 2-D graphs. And so, the N-soliton and multiple wave solutions of model (7) by linear superposition technique to the bilinear model were earned. Various types of new analytic solutions in the form of first-, second-, third-, fourth-order rogue wave functions are obtained. We can conclude that the Hirota bilinear and linear superposition techniques are more powerful and efficient approaches in finding rational lump wave solutions for large classes of nonlinear problems and can be applied to many other nonlinear partial differential equations arising in mathematical physics. In addition, the obtained results show that the proposed MRWSM is simple, straightforward and productive, which is expected to bring a light to the study of the traveling wave theory. Moreover, with the help of Maple computer program, we put out the direction of the gotten arrangements for visualizing the accomplished dynamical properties. The strength of the described equation that it is predictable, trustworthy, and computationally appealing. We are certain that the indicated methodologies will play a vital role in future research.
Data availibility
The datasets generated during and/or analyzed during the current study are available from the corresponding author on reasonable request.
References
Hirota, R. & Satsuma, J. N-Soliton Solutions of Model Equations for Shallow Water Waves. Journal of the Physical Society of Japan 40(2), 611–612 (1976).
Hietarinta, J. Introduction to the Hirota bilinear method. In Integrability of Nonlinear Systems (eds Kosmann-Schwarzbach, Y. et al.) 95–103 (Springer, Berlin, Heidelberg, 1997).
Ma, W. X., Li, J. & Khalique, C. M. A Study on Lump Solutions to a Generalized Hirota-Satsuma-Ito Equation in (2+1)-Dimensions, Complexity 2018. Article ID 9059858, 1–7 (2018).
Chen, S. J., Lü, X. & Ma, W. X. Bäcklund transformation, exact solutions and interaction behaviour of the (3+1)-dimensional Hirota-Satsuma-Ito-like equation. Communications in Nonlinear Science and Numerical Simulation 83, 105135 (2020).
Liu, Y., Wen, X. Y. & Wang, D. S. The N-soliton solution and localized wave interaction solutions of the (2+1)-dimensional generalized Hirota-Satsuma-Ito equation. Computers and Mathematics with Applications 77, 947–966 (2019).
Kuo, C. K. & Ma, W. X. A study on resonant multi-soliton solutions to the (2+1)-dimensional Hirota-Satsuma-Ito equations via the linear superposition principle. Nonlinear Analysis 190, 111592 (2020).
Ma, W. X., Li, J., & Khalique, C. M. A Study on Lump Solutions to a Generalized Hirota-Satsuma-Ito Equation in (2+1)-Dimensions, Complexity, 2018 (2018) Article ID 9059858.
Kumar, S., Nisar, K. S. & Kumar, A. A (2+1)-dimensional generalized Hirota-Satsuma-Ito equations: Lie symmetry analysis, invariant solutions and dynamics of soliton solutions. Results in Physics 28, 104621 (2021).
Ali, T. A. A., Xiao, Z., Jiang, H. & Li, B. A Class of Digital Integrators Based on Trigonometric Quadrature Rules. IEEE Transactions on Industrial Electronics 71(6), 6128–6138 (2024).
Zhu, C., Al-Dossari, M., Rezapour, S. & Gunay, B. On the exact soliton solutions and different wave structures to the (2+1) dimensional Chaffee-Infante equation. Results in Physics 57, 107431 (2024).
Zhu, C., Al-Dossari, M., Rezapour, S. & Shateyi, S. On the exact soliton solutions and different wave structures to the modified Schrödinger’s equation. Results in Physics 54, 107037 (2023).
Hui, Z. et al. Switchable Single- to Multiwavelength Conventional Soliton and Bound-State Soliton Generated from a NbTe2 Saturable Absorber-Based Passive Mode-Locked Erbium-Doped Fiber Laser. ACS Applied Materials Interfaces 16(17), 22344–22360 (2024).
Kai, Y., Ji, J. & Yin, Z. Study of the generalization of regularized long-wave equation. Nonlinear Dynamics 107(3), 2745–2752 (2022).
Kai, Y. & Yin, Z. Linear structure and soliton molecules of Sharma-Tasso-Olver-Burgers equation. Physics Letters A 452, 128430 (2022).
Liu, W., Bai, X., Yang, H., Bao, R. & Liu, J. Tendon Driven Bistable Origami Flexible Gripper for High-Speed Adaptive Grasping. IEEE Robotics and Automation Letters 9(6), 5417–5424 (2024).
Xie, G. et al. A gradient-enhanced physics-informed neural networks method for the wave equation. Eng. Anal. Boundary Elements 166, 105802 (2024).
Jiang, H., Li, S.M., & Wang, W.G. Moderate deviations for parameter estimation in the fractional ornstein-uhlenbeck processes with periodic mean. Acta Math. Sinica, English Ser. 40, 2024, 1308-1324.
Chen, D., Zhao, T., Han, L. & Feng, Z. Single-stage multi-input buck type high-frequency link’s inverters with series and simultaneous power supply. IEEE Trans. Power Elec. 37, 7411–7421 (2022).
Chen, C., Han, D. & Chang, C. C. MPCCT: multimodal vision-language learning paradigm with context-based compact transformer. Pattern Recogn. 147, 110084 (2024).
Shi, S., Han, D. & Cui, M. A multimodal hybrid parallel network intrusion detection model. Connect. Sci. 35, 2227780 (2023).
Wanh, H., Han, D., Cui, M. & Chen, C. NAS-YOLOX: a SAR ship detection using neural architecture search and multi-scale attention. Connect. Sci. 35, 1–32 (2023).
Zhou, C., Wang, C., Zhang, B. & Li, B. Deep Learning-Based Coseismic Deformation Estimation From InSAR Interferograms. IEEE Trans. Geosci. Remote Sens. 62, 5203610 (2024).
Fei, R., Guo, Y., Li, J., Hu, B. & Yang, L. An improved BPNN method based on probability density for indoor location. IEICE Trans. Inf. Syst. 106, 773–785 (2023).
Dehghan, M., Manafian, J., & Saadatmandi, A. Solving nonlinear fractional partial differential equations using the homotopy analysis method. Numerical Methods for Partial Differential Eq. J. 26, (2010) 448-79.
Dehghan, M. & Manafian, J. The solution of the variable coefficients fourth–order parabolic partial differential equations by homotopy perturbation method, Zeitschrift für Naturforschung A. 64a (2009) 420-30.
Manafian, J. & Lakestani, M. Application of tanϕ/2-expansion method for solving the Biswas-Milovic equation for Kerr law nonlinearity. Optik 127, 2040–2054 (2016).
Aly, R. & Seadawy, J. Manafian, New soliton solution to the longitudinal wave equation in a magneto-electro-elastic circular rod. Results in Physics 8, 1158–1167 (2018).
Manafian, J. Novel solitary wave solutions for the (3+1)-dimensional extended Jimbo-Miwa equations. Comput. Math. Appl. 76(5), 1246–1260 (2018).
Manafian, J., Mohammadi-Ivatlo, B. & Abapour, M. Lump-type solutions and interaction phenomenon to the (2+1)-dimensional Breaking Soliton equation. Appl. Math. Comput. 13, 13–41 (2019).
Ilhan, O. A. & Manafian, J. Periodic type and periodic cross-kink wave solutions to the (2+1)-dimensional breaking soliton equation arising in fluid dynamics. Modern Physics Letters B 33, 1950277. https://doi.org/10.1142/S0217984919502774 (2019).
Ma, W.X., Zhou, Y., & Dougherty, R. Lump-type solutions to nonlinear differential equations derived from generalized bilinear equations, Int. J. Mod. Phys. B 30 (28n29) (2016) 1640018.
Zhang, S., Manafian, J., Ilhan, O.A., Jalil, A.T., Yasin, Y., & Gatea, M.A. Nonparaxial pulse propagation to the cubic-quintic nonlinear Helmholtz equation, International Journal of Modern Physics B. https://doi.org/10.1142/S0217979224501170.
Gu, Y., Manafian, J., Mahmoud, M.Z., Ghafel, S.T., & Ilhan, O.A. New soliton waves and modulation instability analysis for a metamaterials model via the integration schemes, International Journal of Nonlinear Sciences and Numerical Simulation, https://doi.org/10.1515/ijnsns-2021-0443.
Chen, H., Shahi, A., Singh, G., Manafian, J., Baharak Eslami, B., & Alkader, N.A. Behavior of analytical schemes with non-paraxial pulse propagation to the cubic-quintic nonlinear Helmholtz equation. Math. Comput. Simul. 220 (2024) 341-356.
Bao, X., Yuan, H., Shen, J., Liu, C., Chen, X., & Cui, H. Numerical analysis of seismic response of a circular tunnel-rectangular underpass system in liquefiable soil. Comput. Geotech. 74, 106642 (2024).
Liang, S., Gao, Y., Hu, C., Hao, A., & Qin, H. Efficient Photon Beam Diffusion for Directional Subsurface Scattering. IEEE Trans. Visualiz. Comput. Graph. https://doi.org/10.1109/TVCG.2024.3447668
Li, X., Hu, S., He, J., Li, D., Xi, Y., Lan, H., Xu, L., Mingliang, L., Tan, M., & Xiao, M. Electric-feld-driven printed 3D highly ordered microstructure with cell feature size promotes the maturation of engineered cardiac tissues. Adv. Sci. 10, 2206264 (2023).
Zhang, K. et al. Eatn: an efficient adaptive transfer network for aspect-level sentiment analysis. IEEE Trans. Knowledge Data Eng. 35, 377–389 (2021).
Chen, D., Zhao, T. & Xu, S. Single-stage multi-input buck type high-frequency link’s inverters with multiwinding and time-sharing power supply. IEEE Trans. Power Elec. 37, 12763–12773 (2022).
Chen, C., Han, D. & Shen, X. CLVIN: complete language-vision interaction network for visual question answering. Knowl. Based Syst. 275, 110706 (2023).
Chen, X., Yang, P., Wang, M., Hu, F. & Xu, J. Output voltage drop and input current ripple suppression for the pulse load power supply using virtual multiple quasi-notch-flters impedance. IEEE Trans. Power Elec. 38, 9552–9565 (2023).
Manafian, J. & Lakestani, M. New exact solutions for a discrete electrical lattice using the analytical methods. Eur. Phys. J. Plus 133, 119 (2018).
Zhao, N., Manafian, J., Ilhan, O. A., Singh, G. & Zulfugarova, R. Abundant interaction between lump and k-kink, periodic and other analytical solutions for the (3+1)-D Burger system by bilinear analysis. Int. J. Modern Phys. B 35(13), 2150173 (2021).
Feng, B., Manafian, J., Ilhan, O. A., Rao, A. M. & Agadi, A. H. Cross-kink wave, solitary, dark, and periodic wave solutions by bilinear and He’s variational direct methods for the KP-BBM equation. Int. J. Modern Phys. B 35(27), 2150275 (2021).
Han, D. et al. LMCA: a lightweight anomaly network traffic detection model integrating adjusted mobilenet and coordinate attention mechanism for IoT. Telecommun. Syst. 84, 549–564 (2023).
Liao, L. et al. Color image recovery using generalized matrix completion over higher-order finite dimensional algebra. Axioms 12, 954 (2023).
Meng, S., Meng, F., Chi, H., Chen, H. & Pang, A. A robust observer based on the nonlinear descriptor systems application to estimate the state of charge of lithium-ion batteries. J. Frankl. Inst. 360, 11397–11413 (2023).
Chen, D. L., Zhao, J. W. & Qin, S. R. SVM strategy and analysis of a three-phase quasi-Z-source inverter with high voltage transmission ratio. Sci. China Technol. Sci. 66, 29963010 (2023).
Liu, Z., Xu, Z., Zheng, X., Zhao, Y. & Wang, J. 3D path planning in threat environment based on fuzzy logic. J. Intell. Fuzzy Sys. 46, 7021–7034 (2024).
Zhaqilao, A symbolic computation approach to constructing rogue waves with a controllable center in the nonlinear systems, Comput. Math. Appl. 75 (9) (2018) 3331-3342.
Ma, W. X. & Fan, E. Linear superposition principle applying to Hirota bilinear equations. Comput. Math. Appl. 61, 950–959 (2011).
Ma, W. X., Zhang, Y. & Tang, Y. N. Symbolic computation of lump solutions to a combined equation involving three types of nonlinear terms, East Asian. J. Appl. Math. 10, 732–745 (2020).
Kuo, C. K. & Ma, W. X. A study on resonant multi-soliton solutions to the (2+1)-dimensional Hirota-Satsuma-Ito equations via the linear superposition principle. Nonlinear Anal. 190, 111592 (2020).
Rizvi, S.T.R., Ud-Din Khan, S., Hassan, M., Fatima, I., & Ud-Din Khan, S. Stable propagation of optical solitons for nonlinear Schrödinger equation with dispersion and self phase modulation, Math. Comput. Simul., 179 (2021) 126-136.
Ma, W.X. N-soliton solutions and the Hirota conditions in (1+1)-dimensions, Int. J. Nonlinear Sci. Numer. Simul., 22 (2021) https://doi.org/10.1515/ijnsns-2020-0214.
Ma, W. X., Yong, X. & Lü, X. Soliton solutions to the B-type Kadomtsev-Petviashvili equation under general dispersion relations. Wave Motion 103, 102719 (2021).
Gao, W. Y. Oceanic shallow-water investigations on a generalized Whitham-Broer-Kaup-Boussinesq-Kupershmidt system. Phys. Fluids 35, 127106 (2023).
Gao, W. Y. Considering the wave processes in oceanography, acoustics and hydrodynamics by means of an extended coupled (2+1)-dimensional Burgers system. Chinese J. Phys. 86, 572–577 (2023).
Gao, W. Y., Guo, Y. J. & Shan, W. R. Theoretical investigations on a variable-coefficient generalized forced-perturbed Korteweg-de Vries-Burgers model for a dilated artery, blood vessel or circulatory system with experimental support. Commun. Theor. Phys. 75, 115006 (2023).
Shen, Y., Tian, B., Zhou, T. Y. & Cheng, C. D. Multi-pole solitons in an inhomogeneous multi-component nonlinear optical medium. Chaos Solitons Frac. 171, 113497 (2023).
Zhou, T. Y., Tian, B., Shen, Y. & Gao, X. T. Multi-pole solitons in an inhomogeneous multi-component nonlinear optical medium. Nonlinear Dyn. 111, 8647–8658 (2023).
Xu, W., Aponte, E., & Vasanthakumar, P. The property (ωπ) as a generalization of the a-Weyl theorem. AIMS Math. 9(9), 25646–25658 (2024).
Shi, X., Ishtiaq, U., Din, M., & Akram, M. Fractals of Interpolative Kannan Mappings. Fractal Fract. 8(8), 493 (2024).
Dou, J. et al. Surface activity, wetting, and aggregation of a per-fuoropolyether quaternary ammonium salt surfactant with a hydroxyethyl group. Molecules 28(20), 7151 (2023).
Hong, J., Gui, L. & Cao, J. Analysis and experimental verification of the tangential force effect on electromagnetic vibration of pm motor. IEEE Trans. Energy Convers. 38(3), 1893–1902 (2023).
He, X. et al. Excellent microwave absorption performance of LaFeO3/Fe3O4/C perovskite composites with optimized structure and impedance matching. Carbon 213, 118200 (2023).
Tang, H. et al. Rational design of high-performance epoxy/expandable microsphere foam with outstanding mechanical, thermal, and dielectric properties. J. Appl. Polymer Sci. 141, e55502 (2024).
Zhao, Y. et al. Release Pattern of Light Aromatic Hydrocarbons during the Biomass Roasting Process. Molecules 29(6), 1188 (2024).
Zhu, L., Ma, C., Li, W., Huang, M., Wu, W., Koh, C.S., & Blaabjerg, F. A Novel Hybrid Excitation Magnetic Lead Screw and Its Transient Sub-Domain Analytical Model for Wave Energy Conversion. IEEE Trans. Energy Convers. (2024)
Liang, A. et al. Dynamic simulation and experimental studies of molecularly imprinted label-free sensor for determination of milk quality marker. Food Chem. 449, 139238 (2024).
Wang, C. J. Spatiotemporal deformation of lump solution to (2+1)-dimensional KdV equation. Nonlinear Dynam. 84, 697–702 (2016).
Acknowledgements
The authors extend their appreciation to Taif University, Saudi Arabia, for supporting this work through project number (TU-DSPP-2024-51).
Funding
This research was funded by Taif University, Saudi Arabia, Project No. (TU-DSPP-2024-51).
Author information
Authors and Affiliations
Contributions
The authors contributed equally and significantly in writing this paper. All authors read and approved the final manuscript.
Corresponding author
Ethics declarations
Competing interests
The authors declare they have no competing interests regarding the publication of the article.
Ethics and consent to participate
Not applicable.
Consent for publication
Not applicable.
Additional information
Publisher’s Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
Open Access This article is licensed under a Creative Commons Attribution-NonCommercial-NoDerivatives 4.0 International License, which permits any non-commercial use, sharing, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons licence, and indicate if you modified the licensed material. You do not have permission under this licence to share adapted material derived from this article or parts of it. The images or other third party material in this article are included in the article’s Creative Commons licence, unless indicated otherwise in a credit line to the material. If material is not included in the article’s Creative Commons licence and your intended use is not permitted by statutory regulation or exceeds the permitted use, you will need to obtain permission directly from the copyright holder. To view a copy of this licence, visit http://creativecommons.org/licenses/by-nc-nd/4.0/.
About this article

Cite this article
Guo, Y., Chen, Y., Manafian, J. et al. Exploring N-soliton solutions, multiple rogue wave and the linear superposition principle to the generalized hirota satsuma-ito equation. Sci Rep 14, 26171 (2024). https://doi.org/10.1038/s41598-024-74333-4
Received:
Accepted:
Published:
DOI: https://doi.org/10.1038/s41598-024-74333-4
Keywords
This article is cited by
-
Bifurcation, chaos, and soliton analysis of the Manakov equation
Nonlinear Dynamics (2025)
-
Analytical Study of the (3+1)-Dimensional Hirota-Jimbo-Miwa Equation: Exact Solutions and Localized Excitations in Optical Field
International Journal of Theoretical Physics (2025)
-
Investigating nonlinear wave structures via auto-Bäcklund transformation and Hirota bilinear method in the coupled Boussinesq system
Pramana (2025)
-
A novel investigation of the extended (3+1)-dimensional B-type Kadomtsev–Petviashvili equation: analysis and simulations
International Journal of Theoretical Physics (2025)
-
Novel Solitary Wave Solutions and Conservation Laws of the Stochastic Biswas–Milovic Equation
International Journal of Theoretical Physics (2025)
