
Abstract
A time domain rock mass parameter identification method considering the Rayleigh damping is proposed in this paper. Starting with a set of initial parameter values, the algorithm solves the finite-element (FE) equations updating the parameters in each iterative step until the result converges to a local optimum. Numerical FE analysis, displacement sensitivity analysis, and the truncated singular value decomposition method are integrated into the solution algorithm for parameter identification. The technique introduced is verified in numerical studies with in-situ experiments of rock mass structures. Our results show that the approach, compared with conventional methods, can reduce ambiguities caused by inadequate data and provide more accurate insights into the subsurface for rock mass quality evaluation.
Similar content being viewed by others


Introduction
The determination of rock mechanics parameters is an important step in the evaluation of rock mass quality and is of significant importance to geotechnical engineering practice. Parameter identification techniques have been the most commonly employed methods for solving these problems. Not only is improving the efficiency and accuracy of parameter identification in rock masses crucial for enhancing the safety assessment of rock masses, but it also faces challenges such as limitations in material modeling and variability in data sources1.Traditionally, rock mechanical properties have been determined using borehole methods, which have been time-consuming, labor-intensive, and costly. These methods provide limited data coverage due to their reliance on point measurements and require heavy equipment, making them difficult to implement in steep topographic sites. The latest research indicates that rock mass strength parameters, such as Poisson’s ratio, elastic moduli and uniaxial compressive strength, can be predicted from the measurement-while-drilling (MWD) data acquired by a computer-controlled drilling rig. However, the damping was not considered in these studies2.
In reviewing the research history, Kavanagh et al. were pioneers in employing parameter identification technology with strain and displacement measurements. They proposed an inversion algorithm based on FE analysis, capable of determining anisotropy. This represents the initial application of FE analysis in parameter identification3,4,5. Iding et al.6 introduced a parameter identification method using FE analysis to identify the parameters of nonlinear elastic solids. It was not until 1980 that Gioda7 first applied this algorithm to parameter identification in geotechnical engineering. Subsequently, Sakurai et al.8 used the FE formulation for parameter identification, assuming the ground medium of tunnel excavation to be linear, isotropic, and elastic, with known Poisson’s ratio and vertical initial stress, to identify the elastic modulus. Further investigations by Sakurai and Gioda focused on parameter identification for the elastic and elasto-plastic material constants of soil and rock9,10,11. For large and complex geotechnical engineering problems, Swoboda et al.12 developed a general parameter identification code based on the dual boundary control method, improving the convergence rate of the Newton iterative process to identify geomechanical parameters of rock mass.
It is widely acknowledged that the deformability of rock mass is related to its structural characteristics, stress conditions, and anisotropy13. Identifying the deformation modulus of rock mass suitable for specific engineering projects is often challenging, time-consuming, and sometimes even impossible. Bieniawski14 provided an empirical method for assessing the deformability of rock mass. However, deterministic traditional approaches may not be sufficient to accurately reflect the natural variability of rock mass properties. Gao H. et al.15introduced a probabilistic method to characterize the uncertainty and variability of the strength and deformation modulus of rock. This method may also have uncertainties because it relies on limited data and the variability of rock types. If the deformation modulus of the rock mass is determined through field testing, it is time-consuming and costly, and the reliability of such results can be questionable. Therefore, E. Hoek and M.S. Diederichs16 proposed two new equations for estimating the deformation modulus of rock mass, providing valuable upper bound values for tunnel design.
With advancements in geotechnical engineering technology, various Machine Learning (ML) algorithms have been applied to the reliability analysis of geological structures such as slopes, tunnels, and deep foundations17. Zhao et al.18 have addressed the complexity of solving geotechnical engineering physical model analytical solutions by using reduced-order models, and proposed an Excel solver method based on high-dimensional model representation to determine rock mechanical parameters, despite the huge amount of computation involved. Chen et al.19 proposed a new inverse analysis framework, using the matrix-variate deep Gaussian process (MVDGP) and Nesterov-accelerated Adam algorithm as an alternative to finite element models, to identify and determine rock mass parameters through Bayesian probabilistic inverse analysis. Jianhe Li et al.20 introduced a method combining Gaussian process regression and three-dimensional fast Lagrangian numerical calculations to address the parameter identification in complex underground engineering projects. In the design of tunnels and underground caverns, geological design input parameters, such as in-situ stress fields, rock mass strength, and deformation moduli, still exhibit uncertainty. These uncertainties may be inherent or stem from insufficient understanding of these parameters. M. Cai13 proposed a probabilistic design method that integrates the Geological Strength Index (GSI), Monte Carlo simulation, and point estimation methods to quantify uncertainties in design and perform risk assessment. Stochastic methods can provide a more comprehensive analysis of tunnel response by simulating different geological conditions and parameters, including the probability assessment of different failure modes. Masoud Mazraehli et al.21 designed rock tunnel linings using the Strength Classification Method (SCM) and the Random Field Method (RFM), which provides a more reliable design process compared to traditional methods. The Monte Carlo simulation method can be used to calculate the probability density distribution of the strength and deformation parameters of rock masses, and the results obtained can serve as input parameters for numerical modeling calibration studies22. However, stochastic numerical methods usually require a significant amount of computational resources and time, especially when performing Monte Carlo simulations, which necessitates running a large number of simulations to obtain reliable results and depend on the assumptions regarding the probability distributions and correlations of rock mass properties.
In recent years, an increasing number of researchers have attempted to focus on identifying rock mass parameters under actual geological conditions using various inverse analysis methods. For instance, Hui Li et al.23 proposed an Optimized Particle Swarm Optimization (OPSO) - Support Vector Machine (SVM) algorithm, which, when integrated with the Finite Element Method (FEM), forms the OPSO-SVM-ABAQUS computational method, capable of accurately calculating the geomechanical parameters of layered soft and hard rocks. Chang et al.24 proposed an inverse analysis method based on Multi-output Support Vector Regression (MSVR) and Differential Evolution (DE) algorithms, capable of performing inverse analysis of rock mass parameters for underground structures using monitoring data combined with numerical simulation in the early stages of tunnel excavation. There are even more innovative approaches that integrate cloud computing, network technology, cloud databases, and numerical simulation to construct an intelligent cloud-based feedback analysis program based on the Particle Swarm Optimization (PSO) and Back Propagation (BP) algorithms, providing real-time parameter feedback25.
In general, current inverse analysis studies incorporate advanced computational methods, models, and theories26,27,28, such as complex function theory, Backpropagation Neural Networks (BNN), Particle Swarm Optimization (PSO), and composite Bayesian optimization strategies specifically for FE analysis. However, most parameter identifications concentrate on the elastic modulus of the rock mass, and there are still many uncertainties and challenges, particularly in the context of material damping. The formulation of the viscous damping matrix cannot be directly determined through mechanistic analysis as stiffness and mass matrices. Therefore, researchers have proposed several simplified models to represent damping effects, with the viscous damping model being the most commonly used29. Damping ratios can be estimated through identification procedure in structural vibration responses, employing methods such as time-domain, frequency-domain, and time-frequency domain techniques30,31,32. The Rayleigh damping model significantly influences the simulated dynamical response, and monitoring the variation in the damping ratio provides a means to detect rock mass damage33. Francisco Galvez et al.34 assessed the accuracy of the Discrete Element Method (DEM) simulation using the Rayleigh damping model and identified potential errors and issues that may arise when applying viscous damping. The continuous wavelet transform technique, widely used in time-frequency domain methods, is applicable for damping identification in various scenarios35,36.
In summary, over the past two decades, a variety of parameter identification algorithms have been developed. For instance, the inverse analysis framework developed by Zhao et al.18 integrates reduced-order models with simplicial homology global optimization, offering a powerful method for determining in-situ stresses and the mechanical properties of rock masses in geology and geotechnical engineering using monitoring data. This approach significantly enhances the efficiency of inverse analysis. However, most studies have focused on identifying the elastic modulus, with few considering Rayleigh damping. Addressing the limitations of material models in developing a universally applicable and effective numerical framework for rock mechanics inverse analysis is a significant challenge. It involves designing robust and adaptable error metrics to accommodate various data sources and constraints. The innovative aspect of this study lies in the simultaneous identification of the elastic modulus while accounting for damping effects.
This study, while still utilizing traditional observational data as inputs for parameter identification, has significantly overcome the limitation of only being able to identify the elastic moduli, thus achieving simultaneous identification of both the elastic moduli and Rayleigh damping coefficients of the rock mass. In previous research, seed values were assumed based on experience or best engineering practices. However, the sensitivity analysis of seed values is expanded in this study, enabling iterative convergence and influencing the convergence rate of the parameters identified. Defining the seed values for Rayleigh damping coefficients, with mass damping coefficient \(\alpha\) = \(\xi\)\({\omega _{f} }\) and stiffness damping coefficient \(\beta\) = \(\xi\) / \({\omega _{f} }\), allows for obtaining the damping ratio \(\xi\) and fundamental frequency \({\omega _{f} }\) through eigenvalue analysis. Rayleigh damping is expressed as mass and stiffness proportional terms, calculated using the equations of motion to determine the dynamic response of the rock mass, employing the Newmark-\(\beta\) incremental time integration method to solve for elastic modulus and Rayleigh damping coefficients. Finally, the feasibility of this method is confirmed by its application to the in-site data from the Oya tuff underground quarry in Japan.
Identification method in the time domain
The output error criterion used in identification of elastic moduli and Rayleigh damping, where the material parameters are implicitly included in the FE governing equation, is defined as the difference between observed and calculated displacements at specified observation points. In general, an algorithm employs the trial values of the unknown parameters as input data in the FE analysis and improves their values in an iterative manner until the structure system model response is sufficiently close to that of the observations.
The difference between measured and numerically calculated displacement-time histories in the rock mass at observation points can be assessed using the sum of squares in the time domain as follows:
In Equation (1), \(\textbf{n}\) is the number of measurement points on the bedrock surface, and \(u_i(\textbf{P},t)\) and\(\ u_i^*(t)\) and represent the calculated and the measured displacement-time histories at the observation points, respectively. The vector \(\textbf{P}={(E_1,E_2,...,E_m,\alpha ,\beta )}^T\) contains the unknown material parameters, where \(\textbf{m}\) is the number of divided material domains of rock mass. \(\textbf{t}\) is the integration time at which the calculated response matches the measured responses at the structure surface.
To optimize the unknown parameters, iteration methods are usually adopted in the model updating process with Newton method, Quasi-Newton method, Gauss-Newton method37,38,39,40. Beginning with a set of initial parameter values, the algorithm solves the FE equations and updates the parameters in each iterative step until the solution converges to a local optimum. The Gauss-Newton algorithm generates the following sequence of parameters for the unconstrained minimization problem39,40.
In which, it is called a normal equation. where \(\textbf{A}\) is a (m + 2) \(\times\) (m + 2) matrix of sensitivity coefficients, \(\textbf{b}\) is a (m + 2) \(\times\) 1 vector of error values, \(d\textbf{P}\) is the increment form of unknown parameter vector.
The sensitivity coefficient is calculated for a parameter that needs to be identified. Decomposing \(\textbf{A}\) into truncated singular values41, we obtain
where \(\textbf{V}\) is matrices which columns is eigenvector of \(\textbf{A}\), and \(\textbf{D}\) is a diagonal matrix composed of the singular values of \(\textbf{A}\). \(\textbf{A}\) is unit matrix.
The solution of equation (2) leads to a new parameter increment vector \(d\textbf{P}\).
Matrix \(\textbf{A}\) is then calculated again with respect to new parameter \(\textbf{p}\), and the iteration is continued until \(\vert {dP}_j^{(k)}/P_j^{(k)}\vert <\varepsilon\) where \(\varepsilon\) is a prescribed tolerance, and then the solution reaches to the optimization parameters.
Methodology of elastic moduli and Rayleigh damping identification
Dynamic response analysis
In dynamic FE analysis, the governing equation of motion is expressed as42,
where \(\textbf{M}\), \(\textbf{C}\), and \(\textbf{K}\) are the mass, damping, and stiffness matrices, respectively, f(t) can be understood as a time-dependent load vector function, and \(\ddot{\textbf{u}}\)(t), \(\dot{\textbf{u}}\)(t),\(\textbf{u}\)(t), are acceleration, velocity, displacement vectors, respectively.
A very common and efficient type of damping used in the FE modeling for rock mass is Rayleigh damping. It is generally expressed in matrix form as a linear combination of both mass \(\textbf{M}\) and stiffness \(\textbf{K}\) matrices42.
where \(\alpha\) and \(\beta\) are mass and stiffness proportional parameters, respectively. The relationship between \(\alpha\) and \(\beta\) and the critical damping ratio \(\xi\) at a angular frequency \(\omega\) (rad/s) for each vibrational mode of a continuous system42.
If the damping ratio is attained at the two modes m and n with angular frequencies \(\omega _m\) and \(\omega _n\), the expressions for \(\alpha\) and \(\beta\) are
The \(\alpha\) and \(\beta\) determined according to the damping ratio and the angular frequency \(\omega\) of the structure. The process of calculating angular frequencies for different modes corresponds to solution of the eigenproblem, i.e. solving the eigen equation, \(\textbf{K}\)\(\textbf{x}\) = \(\omega ^{2}\)\(\textbf{M}\)\(\textbf{x}\), where \(\omega\) is angular frequency, \(\textbf{x}\) is eigenvector. The angular frequencies are obtained with the subspace iteration method in our developed program.
Sensitivity analysis in the time domain
The sensitivity analysis automatically optimizes the structure to find the search direction toward the best solution. An efficient sensitivity analysis is essential for determining the effects of such perturbations.
In the motion equation (7), neither the system mass nor the dynamic load depend on the material properties. Only the stiffness matrix is related to the material parameters. Performing differentiation to both sides of equation (7) with respect to the parameters \(E_j\), \(\alpha\) and \(\beta\), we have
where \(E_j\), \(\alpha\) and \(\beta\) are unknown parameters, and right-hand sides are the pseudo-force vector.
The responses of the rock mass are calculated from equation (7). The sensitivity\(\partial \ddot{\textbf{u}}/\partial p_j\), \(\partial \dot{\textbf{u}}/\partial p_j\) and \(\partial \textbf{u}/\partial p_j\) with respect to the elastic moduli and Rayleigh damping coefficients can then be solved by step-by-step time integration Newmark-\(\beta\) method from Equation (11) to (13). Once displacement sensitivity \(\partial \textbf{u}/\partial p_j\) is calculated, and then sensitivity matrix \(\textbf{A}\) and right-hand side vector \(\textbf{b}\) described in Equation (3) are generated.
The FE dynamic response analysis, displacement sensitivity analysis and the truncated singular value decomposition method are integrated together in the solution algorithm for the parameters identification in the flowchart shown in Fig. 1.

Integrated solution algorithm for parameter identification.
Verification of the proposed method
Without loss of generality, before applying the proposed method to a real problems, the numerical accuracy and convergence characteristics of the identification procedure were validated in an elastic multilayered homogeneous model constructed using axisymmetric FE.
In this study, a self-developed finite element program was utilized to construct and analyze the finite element model of the rock mass. Initially, the geometric shape of the model, including its dimensions and boundary conditions, was defined. Subsequently, physical properties such as density, elastic modulus, and Poisson’s ratio were assigned to the model.
The mechanical parameters of the rock mass were numerically calculated using FE from a previously developed model with the following general characteristics (shown in Fig. 2): the model size is 20 m\(\times\) 20 m, number of FE \(N_{ELEMENT}\) = 441, number of nodes \(N_{NODE}\) = 1408, a minimum mesh size of 0.0095 m. Fixed and sliding boundaries were imposed to simulate the interaction of the rock mass with its surroundings.

The information of simulated rock mass: (a) Layer parameters, (b) FE mesh, and (c) The positional relationship between the measurement points, the vibration excitation point and grid nodes.
The geometrical and material properties of the model are shown in Table 1. The model was set as a two-layer material with elastic moduli of \(E_1\) = 6 GPa, \(h_1\) = 2.4 m in the first layer and \(E_2\) = 8 GPa, \(h_2\) = 17.6 m in the second layer. The Poisson’s ratio and density were set as 0.25 and 1770 \(kg/m^3\), and remained constant throughout the parameter identification procedure.
The accelerometers were placed perpendicularly to each other on the surface of the rock mass. The distances of wave refraction, the dimensions of the underground quarry, and the cable lengths connecting to the accelerometers were neglected. Surface accelerations were measured at Points A, B, C, D, and E, set at equal intervals along a straight line in the same direction, with distances from the center point for loading being 0.3, 0.6, 1.2, 2.4, and 4.8 m, respectively (as shown in Fig. 2c). Figure 2c is a partial enlargement of the finite element mesh diagram from Fig. 2b, with Point O being the vibration excitation point. The observed acceleration values in three directions can be recorded at each point; however, only the observation values in the up and down direction were selected for study, as the changes in this direction are the most pronounced.
Influence of damping coefficient on the calculation results of the forward analysis
The natural angular frequency \(\omega\) and fundamental frequency f of the structure were obtained through eigenvalue analysis. Assuming a damping ratio \(\xi\) of 3\(\%\), the known assumed parameters of the layered media were then found. The measured load function for generating surface waves is plotted in Fig.3.

Acceleration-time history at the observed points and the measured load.
The time interval between the load and acceleration-time histories (2.4 \(\times\)\(10^{-5} s\)) was adopted as the step length for the integration time. The displacement, velocity, and acceleration were directly obtained in the time domain using a step-by-step integration procedure. Eigenvalue analysis was utilized to determine the angular frequencies up to the 30th order. Subsequently, a free selection was made from these frequencies, specifically the 1st and 2nd order angular frequencies for one combination, and the 1st and 30th order angular frequencies for another. Employing Equation (10), two distinct sets of damping coefficients \(\alpha\) and \(\beta\) were calculated and are hereby defined as Case 1 and Case 2, respectively. The generated displacement values at Points A to E are analyzed and compared in Fig. 4.

Displacements obtained in the forward analysis with the true values of \(\alpha\) and \(\beta\) at Points A to E.
As clarified in Fig. 4, the time of peak displacement depends on \(\beta\). More specifically, reducing \(\beta\) shortens the appearance time of the peak. The factor of the tendency is explained as follows. When Rayleigh damping is considered, the mass-proportional damping in Rayleigh damping is inversely proportional to frequency, thus providing more pronounced damping effects on the structure within the low-frequency range. Conversely, the stiffness-proportional damping is directly proportional to frequency, offering better attenuation for high-frequency vibration components. Consequently, as the system’s stiffness increases, the natural frequency of the system also rises, leading to a reduction in displacement duration. This is attributed to the more significant damping effect of the stiffness-proportional damping at higher frequencies. Although in practical rock engineering analysis, the peak strength of structural planes depends not only on the stiffness coefficient but also on a variety of factors, such as the roughness of the structural plane, material properties, stress levels, and loading history. However, a lower stiffness coefficient implies that a lower stress level can induce larger displacements or deformations, potentially triggering the peak response of the structural plane earlier. Therefore, theoretically, a lower Rayleigh damping coefficient \(\beta\) corresponds to a reduction in the viscous resistance of the structural plane, leading to a diminished capacity to withstand external forces. This reduction in resistance results in increased displacements, which in turn can precipitate an earlier occurrence of peak displacement values. The phenomenon depicted in Fig. 4 is consistent with this theory and also substantiates the conclusion that \(\beta\) is sensitive to the identification results.
In order to delve deeper into the relationship between various damping types and frequency, it is elucidated how undamped, mass damping, stiffness damping, and Rayleigh damping each uniquely influence the vibrational characteristics of a system at various frequencies. The relationship among several kinds of damping forms and damping ratio \(\xi\) with employing the true values of \(\alpha\) and \(\beta\) for rock mass, which can be plotted as shown in Fig. 5. Blue line represents mass damping, red line is stiffness damping, and green line represents the Rayleigh damping. In the low frequency band, \(\alpha\) has a greater impact, and in high frequency band, \(\beta\) has a greater impact. The acceleration value measured on site is transformed by fast Fourier transform (FFT) to obtain the orange solid line. It was found that a large amount of data is distributed in the high frequency range, which is roughly above 50Hz, and only a small amount of data is located in the low frequency range. Observations indicate that within the high-frequency range, the damping ratio decreases as the frequency increases, whereas within the low-frequency range, the damping ratio increases as the frequency increases. There exists a threshold frequency such that below this threshold, the damping ratio increases as frequency increases; above the threshold, the damping ratio decreases as frequency increases. The primary reason for this phenomenon lies in the viscoelastic characteristics and energy dissipation mechanisms within the rock. At high frequencies, the stress wave frequency is too high for the rock’s internal viscous mechanisms to respond to the rapid changes, resulting in a decreased damping ratio. Conversely, at low frequencies, the stress wave frequency is lower, allowing the rock’s internal viscous mechanisms ample time to respond to the vibrations, leading to greater energy dissipation and an increased damping ratio. This also verifies the reason that \(\alpha\) is independent during the identification procedure, which is unaffected by seed value. And it is consistent with the conclusion that \(\beta\) is sensitive to the result of identification.

The relationship between damping ratio and acceleration spectrum.
To further illustrate the reliability and credibility of the forward analysis, the displacement time plots at the five observation points were obtained for different damping forms (no damping, mass damping, stiffness damping, and Rayleigh damping). The results are compared in Figure 6. Near overlaps are observed between the displacement-time curves of mass damping and no damping and between those of stiffness damping and Rayleigh damping. That is, the red and black lines in Fig. 6 overlap, and the blue and green lines overlap. Therefore, the displacement is almost independent of the mass damping coefficient and the calculation considerate the Rayleigh damping is mainly affected by the stiffness damping coefficient. This finding explains why the inverse value in the identification procedure is almost independent of the seed value of \(\alpha\) changes, almost equal seed value.

Displacements at Points A to E under different damping forms.
Parameter inversion
The seed values of the damping coefficients are input to the parameter identification (Table 2). The iterative procedure continuously adjusts the seed values until the convergence condition at the kth iteration step is met, that is \(\vert {dP}_j^{(k)}/P_j^{(k)}\vert <\varepsilon =10^{-3}\), j = 1,...,m + 2. Table 3 lists the inversed values of the material parameters obtained through the identification procedure. The inversed elastic moduli almost converged to the true values and the back-calculated values of the Rayleigh damping coefficients were also highly acceptable.
Next, back-calculation was performed for different seed values of the four unknown parameters. we compared the convergence behaviors of the elastic moduli and the Rayleigh damping coefficients in the layered media across different seed values. Figure 7 illustrates the convergence results of the unknown parameters, drawn when the seed values are assumed to be different percentages of their true values. Figure 8 shows the ratio of the back-calculated values of the four unknown parameters when the seed values are all taken to be the same percentage of their true values.

Convergence behaviors of the different seed values for material parameters (a) E1; (b) E2; (c) \(\alpha\); (d) \(\beta\).

Convergence procedure of the material parameters with different seed values in terms of percentage of exact value (a) 30\(\%\); (b) 50\(\%\); (c) 80\(\%\); (d) 120\(\%\); and (e) true value.
In Fig. 7, it is observed that the stiffness coefficient is highly sensitive to the iteration number. This sensitivity is attributed to the fact that rock mass, as a natural material, has mechanical properties influenced by various geological conditions such as fractures, bedding, and joints. The uncertainty in the distribution, density, and orientation of these geological structures may contribute to the increased sensitivity of the stiffness coefficient. During the identification process, if the stress-strain relationship of the rock mass does not conform to a linear assumption, then the stiffness coefficient, being the ratio of stress to strain, may be highly sensitive to the iteration process43. Moreover, our study involves the coupling of multiple parameters. The interrelationships and coupling effects among these parameters may further enhance the sensitivity of the stiffness coefficient to the iteration process. However, upon examination of Figs. 7 and 8, it is also observed that although the iteration process is highly sensitive, convergence is rapid, with convergence achievable within a maximum of 13 iterations. This is due to the application of a regularization method in our back calculation process40. By adding an extra term to the objective function, while meeting the data fitting requirements, we control the magnitude of the parameters, thereby enhancing the generalization capability of the solution. This method reduces the dependency on seed values during the back calculation process, and thus improves the stability and convergence of parameter identification, ultimately affecting the accuracy of the identification results.

Back-calculated accuracy versus seed value of the material parameters.
As shown in Fig. 9, the elastic moduli and mass damping coefficient remained close to their true values as the seed value ranged from 30\(\%\) to 120\(\%\). However, the ratio (inversed / true value) of the stiffness damping coefficient, when the seed value was changed in this interval can only reach about 83\(\%\). This is because the first layer of the model is assumed to be softer than the second layer during the calculation, which is consistent with the properties of natural rock mass, particularly in loose zones. The identification of the stiffness damping coefficient depends on the elastic moduli, that is, the convergence value of \(\beta\) is influenced by the assumed seed value of the elastic moduli.
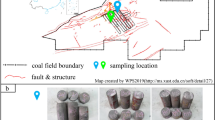
Application to The Oya tuff underground quarry
To explore whether the parameter identification procedure can effectively solve practical problems, a numerical simulation was conducted using the experimental data depicted in Fig. 3. It should be noted that this data, used in the study, has had high-frequency components above 500 Hz filtered out. This is because previous dynamic analysis results of the frequency response function indicate that the waveform, based on the experimental data processed with a 500Hz low-pass filter, can more accurately represent the actual vibration propagation characteristics.
Axisymmetric FE model
The Oya tuff underground quarry consists of geological sedimentary rock, and the research region is assumed to be a layered media. Previously, in the parameter identification procedure, the author assumed a homogenous rock mass and a linear elastic half-infinite space. The calculated values slightly exceeded the measured values and the peak displacement was delayed. To address this problem, this study proposed a more reasonable hypothesis using a two-layer model that better reflects the heterogeneity of the rock mass. The parameters were identified on a 20 m - 20 m grid , as previous described (see Fig. 2), but the mechanical properties of the model (Table 4) differ from those of the previous case. The Rayleigh damping coefficients were obtained from the damping ratio and fundamental frequency of the structure through an eigenvalue analysis. The elastic moduli were calculated from the measured P-wave velocity \(V_p\) and the mechanical properties of Oya tuff. The first and second layers of the Oya tuff are described as loose and flesh-colored, respectively. The \(V_p\) values have been determined as 2195 m/s in the first layer and 2300 m/s in the second layer. The elastic moduli of the first and second layers are calculated to be \(E_1\) = 7.36 GPa and \(E_2\) = 8.08 GPa, respectively.
In-site experiment
The experimental site is located at the bottom of the Oya tuff underground quarry. Given that the surface of the excavated Oya tuff rock mass is flat and uniform, it minimally interferes with the test data under impact loading. An excitation point was struck with a 5.5kg hammer, and five accelerometers (each with a diameter of 24 mm) were fixed along a straight line in the same direction at 0.3, 0.6, 1.2, 2.4, and 4.8 m from the point of load impact (Figs. 10 and 11). The radius of the impact hammer excitation was 0.038 m, the loading covered two mesh units, and the duration was taken as 0.02s. The vibration generated can produce Rayleigh waves, which propagate along the surface of the structure. The acceleration was recorded at each measurement point.

Accelerometers device placed on the rock mass surface, (a) The overall status of the loading vibration, (b) Accelerometer fixed status.

Conceptual diagram of the shock vibration experiment.
Dynamic analysis and parameter identification
The damping ratio for the rock mass was assumed to be 3\(\%\), as reported in previous studies20. The initial seed values for Oya tuff are detailed in Table5.
The parameter identification procedure for the material parameters of Oya tuff entails the determination of four unknown parameters in the time domain: the elastic moduli \(E_1\) and \(E_2\) of the two layers, and the damping coefficients \(\alpha\) and \(\beta\). Utilizing the observation data of from the in-site experiment, the start and end points for the back-calculation were established at 0.0025 seconds and 0.008 seconds, respectively. These points were considered as reliable and credible based on the analysis. Drawing from prior experience, the seed values of for \(E_1\) and \(E_2\) were initialized set to 1 GPa and 2 GPa, respectively, while the damping coefficients were initialized set to their presumed true values. The time increment for the back-calculation was set to 2.4\(\times 10^{-5}s\), The computational process involved 300 calculation steps and 500 time steps for the loading phase. The algorithm was deemed to have converged after 31 iterations. The computational outcomes demonstrate that the convergence rate remains swift and stable, it is once again verified that this algorithm is also suitable for natural rocks with gradually increasing elastic modulus. The back-calculation outcomes are presented in Table 6 and Fig. 12.

Convergence trends of the unknown parameter identification.
The acceleration-time histories from Points A to E are compared between the experimental measurements and forward-calculation using the identified parameters of the rock mass, as depicted in Fig. 13. It is observed that there is close agreement between the experimentally measured and forward-calculated acceleration-time histories. However, the peak of the calculated acceleration is noted to occur noticeably earlier, starting from Point C, which is consistent with findings from previous studies on forward analysis.

Comparison between observed and calculated Z-acceleration-time histories at Points A to E.
It can also be observed that the calculated acceleration flattens more rapidly than the observed ones in Fig. 13. This disparity may be associated with the complexity of geological structures in actual underground engineering, such as faults, fractures, and joints, which can significantly influence wave propagation. Numerical calculations, on the other hand, consider the rock mass as a layered medium. Nevertheless, from an alternative perspective, this phenomenon also indicates that the identified \(\beta\) value exceeds the actual stiffness coefficient of the rock mass. As previously discussed, the lower the \(\beta\) value, the more likely it is that structural planes will reach their peak strength earlier.
Conclusions
In our work, a parameter identification methodology is introduced, which facilitates the simultaneous identification of both the elastic moduli and Rayleigh damping coefficients in geological media, specifically for rock mass. This approach dynamically identifies the parameters in the time domain via singular value decomposition combined with the least squares method. The implications and applications of this study are multifaceted and are elaborated upon as follows:
The numerical analysis of the proposed method has demonstrated a strong correlation with experimental data, signifying a major leap in accurately capturing the complex interplay of geological parameters. This high degree of correlation is not just a testament to the accuracy of the identified parameters but also signifies the reliability of the method in replicating real-world geological behaviors.
The method’s iterative solutions showcase rapid convergence to true values, high-lighting its efficiency and precision. This aspect of the method is particularly significant, as it ensures that both the elastic constants and Rayleigh damping coefficients of isotropic materials can be determined conveniently and accurately from experimental measurements. The study provides insight into the differing magnitudes of the stiffness and mass damping coefficients, and also suggests the need for separate inversions. This could lead to enhanced convergence efficiency and more precise parameter identification.
Applying this identification procedure to in-situ measurements within practical geotechnical structures has yielded valuable insights. The influence of seed values on the convergence rate, but not on the converged values, provides a crucial understanding of the iterative process’s behavior. This finding is particularly beneficial for optimizing the identification process in diverse geological settings, ensuring that the method is not only theoretically sound but also practically viable. Overall, this study’s conclusions are summarized below.
(1) The data of a numerical analysis of the proposed method were well correlated with the experimental data, demonstrating the accuracy and reliability of the identified parameters.
(2) In a numerical verification, the iterative solutions quickly converged to the true values. Therefore, the proposed method can conveniently determine both the elastic constants and Rayleigh damping coefficients of an isotropic material from experimental measurements. However, as the stiffness damping coefficient \(\beta\) has a much lower order of magnitude than the mass damping coefficient \(\alpha\), separate identification of \(\alpha\) and \(\beta\) are sometimes necessary to improve the convergence efficiency.
(3) The identification procedure was applied to in situ measurements within a practical geotechnical structure. From the identified parameters values, it was judged that the seed values of the parameters affect the convergence rate but not the converged value.
Data availability
The datasets used and/or analysed during the current study available from the corresponding author on reasonable request.
References
Walton, G. & Sinha, S. Challenges associated with numerical back analysis in rock mechanics. J. Rock Mech. Geotech. Eng. 14, 2058–2071 (2022).
Zhao, R. et al. Deep learning for intelligent prediction of rock strength by adopting measurement while drilling data. Int. J. Geomech. 23, 04023028 (2023).
Kavanagh, K. T. & Clough, R. W. Finite element applications in the characterization of elastic solids. Int. J. Solids Struct. 7, 11–23 (1971).
Kavanagh, K. T. Extension of classical experimental techniques for characterizing composite-material behavior: The experimental-analytical method described in this paper is shown to yield material descriptions from specimen shapes previously considered intractable. Exp. Mech. 12, 50–56 (1972).
Kavanagh, K. T. Experiment versus analysis: Computational techniques for the description of static material response. Int. J. Numer. Meth. Eng.Bold">5, 503–515 (1973).
Iding, R. H., Pister, K. S. & Taylor, R. L. Identification of nonlinear elastic solids by a finite element method. Comput. Methods Appl. Mech. Eng. 4, 121–142 (1974).
Gioda, G. Indirect identification of the average elastic characteristics of rock masses. In International Conference on Structural Foundations on Rock, 1980, Sydney, Australia, vol. 1 (1980).
Sakurai, S. & Takeuchi, K. Back analysis of measured displacements of tunnels. Rock Mech. Rock Eng. 16, 173–180 (1983).
Gioda, G. et al. Some remarks on back analysis and characterization problems in geomechanics. In numerical methods in geomechanics-nagoya 1985, 47–61 (AA Balkema Publishers, 1985).
Gioda, G. Some applications of mathematical programming in geomechanics. In Numerical Methods and Constitutive Modelling in Geomechanics 319–350 (Springer, Berlin, 1990).
Gioda, G. & Sakurai, S. Back analysis procedures for the interpretation of field measurements in geomechanics. Int. J. Numer. Anal. Meth. Geomech. 11, 555–583 (1987).
Swoboda, G., Ichikawa, Y., Dong, Q. & Zaki, M. Back analysis of large geotechnical models. Int. J. Numer. Anal. Meth. Geomech. 23, 1455–1472 (1999).
Cai, M. Rock mass characterization and rock property variability considerations for tunnel and cavern design. Rock Mech. Rock Eng. 44, 379–399 (2011).
Bieniawski, Z. Determining rock mass deformability: experience from case histories. In International journal of rock mechanics and mining sciences & geomechanics abstracts Vol. 15 237–247 (Elsevier, Amsterdam, 1978).
Gao, H. & Kim, K. Probabilistic site characterization strategy for natural variability assessment of rock mass properties. In Engineering Mechanics, 175–178 (ASCE, 1995).
Rafiei Renani, H. & Cai, M. Forty-year review of the Hoek-brown failure criterion for jointed rock masses. Rock Mech. Rock Eng.Bold">55, 439–461 (2022).
Zhang, W., Gu, X., Hong, L., Han, L. & Wang, L. Comprehensive review of machine learning in geotechnical reliability analysis: Algorithms, applications and further challenges. Appl. Soft Comput. 136, 110066 (2023).
Zhao, H., Chen, B. & Li, S. Determination of geomaterial mechanical parameters based on back analysis and reduced-order model. Comput. Geotech. 132, 104013 (2021).
Chen, K., Olarte, A.A.P. Probabilistic Back Analysis Based on Nadam, Bayesian, and Matrix-Variate Deep Gaussian Process for Rock Tunnels. Rock Mech Rock Eng https://doi.org/10.1007/s00603-024-04032-z (2024).
Li, J., Sun, W., Su, G. & Zhang, Y. An intelligent optimization back-analysis method for Geomechanical parameters in underground engineering. Appl. Sci. 12, 5761 (2022).
Mazraehli, M. & Zare, S. Application of different stochastic numerical procedures in rock tunnel lining design. Arab. J. Geosci. 15, 1490 (2022).
Idris, M. A., Basarir, H., Nordlund, E. & Wettainen, T. The probabilistic estimation of rock masses properties in malmberget mine, sweden. Electron J. Geotech. Eng. 18, 269–287 (2013).
Li, H., Chen, W., Tan, X. & Tan, X. Back analysis of geomechanical parameters for rock mass under complex geological conditions using a novel algorithm. Tunn. Undergr. Space Technol. 136, 105099 (2023).
Chang, X., Wang, H. & Zhang, Y. Back analysis of rock mass parameters in tunnel engineering using machine learning techniques. Comput. Geotech. 163, 105738 (2023).
Qu, L. et al. Cloud inversion analysis of surrounding rock parameters for underground powerhouse based on pso-bp optimized neural network and web technology. Sci. Rep. 14, 14399 (2024).
Yan, H.-C. et al. Parameter identification of surrounding rock in underground engineering based on complex function theory. KSCE J. Civ. Eng. 28, 2440–2453 (2024).
Coelho, R. C., Alves, A. F. C. & Pires, F. A. Efficient constitutive parameter identification through optimisation-based techniques: A comparative analysis and novel composite bayesian optimisation strategy. Comput. Methods Appl. Mech. Eng. 427, 117039 (2024).
Sun, J. et al. Inversion of surrounding rock mechanical parameters in a soft rock tunnel based on a hybrid model eo-lightgbm. Rock Mech. Rock Eng. 56, 6691–6707 (2023).
Be, J.-G. et al. Identification of viscous damping in structures from modal information. J. Appl. Mech. 43, 335–339 (1976).
Qu, C.-X., Liu, Y.-F., Yi, T.-H. & Li, H.-N. Structural damping ratio identification through iterative frequency domain decomposition. J. Struct. Eng. 149, 04023042 (2023).
Kaveh, A. & Ardebili, S. R. Equivalent damping ratio for mixed structures including the soil-structure interaction. In Structures Vol. 41 29–35 (Elsevier, Amsterdam, 2022).
Cao, M., Sha, G., Gao, Y. & Ostachowicz, W. Structural damage identification using damping: a compendium of uses and features. Smart Mater. Struct. 26, 043001 (2017).
Hou, R. & Xia, Y. Review on the new development of vibration-based damage identification for civil engineering structures: 2010–2019. J. Sound Vib. 491, 115741 (2021).
Galvez, F., Sorrentino, L., Dizhur, D. & Ingham, J. M. Damping considerations for rocking block dynamics using the discrete element method. Earthq. Eng. Struct. Dyn. 51, 935–957 (2022).
Daubechies, I. The wavelet transform, time-frequency localization and signal analysis. IEEE Trans. Inf. Theory 36, 961–1005 (1990).
Silik, A., Noori, M., Altabey, W. A., Ghiasi, R. & Wu, Z. Comparative analysis of wavelet transform for time-frequency analysis and transient localization in structural health monitoring. Struct. Durab. Health Monitor. 15, 1 (2021).
Levenberg, K. A method for the solution of certain non-linear problems in least squares. Q. Appl. Math. 2, 164–168 (1944).
Marquardt, D. W. An algorithm for least-squares estimation of nonlinear parameters. J. Soc. Ind. Appl. Math. 11, 431–441 (1963).
Fischer, A., Izmailov, A. F. & Solodov, M. V. The levenberg-marquardt method: An overview of modern convergence theories and more. Comput. Optim. Appl. 89, 1–35 (2024).
Mishchenko, K. Regularized newton method with global convergence. SIAM J. Optim. 33, 1440–1462 (2023).
Coleman, M. P. & Bukshtynov, V. An introduction to partial differential equations with MATLAB (CRC Press, Boca Raton, 2024).
Reddy, J. N. An introduction to the finite element method. N. Y. 27, 14 (1993).
Liyuan, L. I. U. & Yifan, L. U. O. Numerical inversion and sensitivity analysis of deformation modulus for deep rock mass. J. China Coal Soc. 49, 1–13. https://doi.org/10.13225/j.cnki.jccs.2023.0441 (2024).
Acknowledgements
The authors gratefully acknowledge the financial support received from the State Key Laboratory of High Performance Civil Engineering Materials (in China), grant number 2022CEM006. We also sincerely acknowledge the funding provided by a grant from the Utsunomiya City Hall and a donation from Chuden Engineering Consultants, Japan.
Author information
Authors and Affiliations
Contributions
Conceptualization, R.H. and Q.D.; methodology, R.H.; software, Q.D and R.H.; validation, R.H., T.S. and Q.D.; formal analysis, Q.D and R.H.; investigation, \(\ddot{O}\).A.; resources, Q.D.; data curation, Q.D.; writing-original draft preparation, R.H.; writing-review and editing, T.S. and Q.D.; visualization, S.Y.; supervision, T.S.; project administration, Q.D.; funding acquisition, T.S. and R.H.. All authors have read and agreed to the published version of the manuscript.
Corresponding authors
Ethics declarations
Conflict of interest
The authors declare that they have no competing interests.
Additional information
Publisher’s note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
Open Access This article is licensed under a Creative Commons Attribution-NonCommercial-NoDerivatives 4.0 International License, which permits any non-commercial use, sharing, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons licence, and indicate if you modified the licensed material. You do not have permission under this licence to share adapted material derived from this article or parts of it. The images or other third party material in this article are included in the article’s Creative Commons licence, unless indicated otherwise in a credit line to the material. If material is not included in the article’s Creative Commons licence and your intended use is not permitted by statutory regulation or exceeds the permitted use, you will need to obtain permission directly from the copyright holder. To view a copy of this licence, visit http://creativecommons.org/licenses/by-nc-nd/4.0/.
About this article

Cite this article
Huang, R., Seiki, T., Dong, Q. et al. Parameter identification of rock mass in the time domain. Sci Rep 14, 24214 (2024). https://doi.org/10.1038/s41598-024-74850-2
Received:
Accepted:
Published:
Version of record:
DOI: https://doi.org/10.1038/s41598-024-74850-2
