
Abstract
In the preprocessing of high-precision navigation and positioning data, the most widely used MW combination cycle slip detection method is greatly affected by pseudorange noise. It has issues such as missing small cycle slips and failing to promptly reset the recursive averaging process after cycle slip detection failure, which leads to subsequent threshold divergence. This paper proposes an improved MW combination cycle slip detection method based on Complete Ensemble Empirical Mode Decomposition (CEEMDAN), permutation entropy, and wavelet denoising, which uses CEEMDAN to decompose the cycle slip signal into a series of intrinsic modal functions (IMFs) and then selects the IMFs that require denoising through the permutation entropy algorithm, and the wavelet denoising technique is combined to eliminate the residual noise further, so that the noise can be removed more accurately. Experimental results show that compared with the original MW algorithm, the proposed improved method can effectively reduce the influence of pseudo-range noise, and reduce the false detection rate of cycle slip from 1.6% and 6–0%. All small period slips can be successfully detected in complex noise environments, avoiding the missed detection of the original MW algorithm and the related threshold divergence problems.
Similar content being viewed by others
Introduction
The Global Navigation Satellite System (GNSS) primarily relies on two basic observational values: pseudorange and carrier phase, of which the carrier phase signal has much higher observational accuracy than pseudorange, and is therefore used for high-precision positioning. Thus, the quality of the carrier phase signal directly affects the accuracy and reliability of positioning. However, factors such as reflections from nearby objects or ionospheric disturbances may cause the receiver’s carrier phase lock loop to briefly lose lock, leading to incorrect integer cycle counts in the carrier phase, a phenomenon known as cycle slip. If these sudden phase slips are not detected and corrected in time, they will severely impact the quality of data processing and the accuracy of positioning. Even a single slip cycle can lead to positioning errors on the order of decimeters1. Therefore, as an essential part of data preprocessing, cycle slip detection is a crucial step to ensure high-precision positioning with GNSS2,3.
Currently, there has been some research progress in cycle slip detection methods. Commonly used cycle slip detection methods include high-order differencing4, polynomial fitting5, MW combination6, ionospheric residual method7, TurboEdit method8, and others. As part of the TurboEdit algorithm, the MW combination method subtracts the narrow-lane combination of pseudorange observations from the wide-lane combination of carrier phase observations. Then, through recursive algorithms to compute the mean and variance, it determines the cycle slip threshold for cycle slip detection. The advantage of the MW combination method lies in its ability to eliminate the influence of geometric distance and ionospheric error terms. Moreover, due to its simplicity and effectiveness, it is widely used in multi-frequency cycle slip detection. However, since the MW combination method uses pseudo-range observations, it is affected by the noise in pseudo-range observations. Under poor observational conditions resulting in significant pseudorange noise, small cycle slips of 1 ~ 2 cycles may be submerged by noise, leading to missed detections9.
Scholars both domestically and internationally have proposed numerous improvements to the MW algorithm. Cai9 improved the MW combination detection value through forward and backward sliding average windows to detect cycle slips, effectively reducing the noise of wide-lane ambiguity and maintaining performance even in rapidly changing ionospheric environments. However, it requires that subsequent epoch data used for smoothing must not contain cycle slips, greatly limiting its applicability. Cai10used wavelet transforms to detect cycle slips, extracting detail signals through band-pass filters at certain scales and amplifying sudden changes at a certain ratio to detect cycle slips. Li11 first applied wavelet analysis methods to decompose GPS double-difference observations and used reconstructed high-frequency signals to identify areas of significant disturbance, then applied the principles and methods of Kalman filtering for cycle slip detection in these areas. Qi12 used wavelet threshold denoising methods to process MW combination observations, with threshold estimation using the Visushrink method to weaken pseudorange noise and increase the identifiability of cycle slips. Gan13 used EMD threshold denoising on MW combination values and proposed a detection scheme based on denoised MW combinations, but this requires adding virtual noise to the MW recursive averages to form virtual observations for data extension. Li14 studies the basic principle of FAEMD decomposition signal and the specific process applied to cycle slip detection and implements the method in a program, but FAEMD needs to determine the decomposition order, and different decomposition orders produce different effects.
Addressing the issue of MW combination detection values being significantly affected by pseudorange observation noise, this paper proposes an improved MW cycle slip detection algorithm based on Complete Ensemble Empirical Mode Decomposition with Adaptive Noise (CEEMDAN) and wavelet denoising combination. Initially, CEEMDAN is utilized to effectively separate the intrinsic mode functions (IMFs) from the signal; then, the permutation entropy algorithm is used to select the IMFs that require denoising; finally, wavelet denoising technology is combined to eliminate residual noise further. Experimental results demonstrate that the method proposed in this paper can detect cycle slips more accurately in complex noise environments, enhancing the precision and reliability of cycle slip detection.
MW combination cycle slip detection method and analysis
MW combination cycle slip detection method
The MW combination detection values are obtained by subtracting the pseudorange observations combined in the narrow lane from the carrier phase observations combined in the wide lane at two frequency points, and it can be represented as:
Where represents the MW combination detection value; \({\phi _i}={\lambda _i}{\varphi _i}\left( {i=1,2} \right)\) represents the carrier phase observation distance at different frequencies (in meters), \({\lambda _i}\) and are the wavelengths and carrier phase observations at different frequencies respectively (wavelength in meters, carrier phase in cycles); \({f_1}\) and re the carrier frequencies at different frequencies; \({P_1}\) and are the pseudorange observations at different frequencies; \({\lambda _{{\text{MW}}}}\) is the wide-lane wavelength; \({N_{{\text{MW}}}}\) is the wide-lane ambiguity.
Based on formula (1), the wide-lane ambiguity can be obtained:
MW combination eliminates geometric distance and ionospheric interference but is still affected by multipath and observational noise. Therefore, in the absence of cycle slips, \({N_{{\text{MW}}}}\) appears as an oscillating constant and is randomly distributed. In the MW combination, the measurement accuracy of the carrier phase is high, and even considering the effects of multipath and other residual errors, its accuracy can reach the level of a few millimeters15; whereas the code width of the pseudorange is larger, and its measurement accuracy is relatively lower, with P-code accuracy roughly at the sub-meter level and C/A-code accuracy at the meter level16. Therefore, when assessing the impact of observational noise on the MW combination, it is mainly necessary to consider the influence of pseudorange measurement errors on formula (2).
Assuming the standard error of pseudorange measurement is \({\sigma _{\text{P}}}\), according to the law of error propagation:
Typically, the standard deviation of receiver pseudorange noise is taken as 0.5 m17. Substituting this standard deviation and specific frequencies and wavelengths into formula (3), the standard deviation of the wide-lane ambiguity can be calculated as 0.4134 cycles12. Therefore, when using the MW combination to detect a one-cycle cycle slip, the occurrence of missed detections and false alarms due to high noise levels may occur. In practical applications, due to the influence of satellite elevation angles and multipath effects, the standard error of pseudorange noise may exceed 0.5 m, further affecting the performance of the MW combination in detecting cycle slips.
MW combination missed detection Phenomenon
When using MW combination to detect cycle slips, the algorithm calculates the mean and variance of the wide-lane ambiguity for each epoch through recursive averaging18:
Where, \({\bar {N}_{{\text{MW}}}}(i)\) represents the mean wide-lane ambiguity of the ith epoch; \(\sigma _{{{\text{MW}}}}^{2}\left( i \right)\) represents the variance of the wide-lane ambiguity for the ith epoch. Based on formulas (2), (4), and (5), each epoch is evaluated sequentially. Cycle slip detection occurs when the following two conditions are simultaneously satisfied:
it is considered that a cycle slip has occurred at the ith epoch. When the cycle slip occurs, the recursive averaging process is reset starting from the epoch immediately following the slip. The purpose of recursive smoothing in this process is to obtain more accurate means and variances for cycle slip detection. However, throughout this process, the wide-lane ambiguity \({N_{{\text{MW}}}}\) remains affected by pseudorange noise and is not eliminated or reduced. Using formulas (6) and (7) for cycle slip detection may result in missed detections for small cycle slips of up to two cycles13.
In order to further analyze the performance of MW combination cycle slip detection, 1000 cycle-slip-free epochs received by Huace P5 receiver installed at ** station of Henan Polytechnic University, receiving BeiDou C03 satellites, were selected for analysis, with a sampling interval of 1 s and frequency combination of C1I and C1Q. Additionally, 1000 cycle-slip-free epochs received by Qianxun SR3 receiver installed on the rooftop of the Surveying and Mapping College of Henan Polytechnic University, receiving BeiDou C01 satellites, were selected for analysis, with a sampling interval of 10 s and frequency combination of C1I and C7I.

The MW combination and threshold without cycle slip.
In Fig. 1, the MW detection values correspond to \({N_{{\text{MW}}}}(i) - {\bar {N}_{{\text{MW}}}}(i - 1)\) in formula (6); the upper and lower threshold curves are the cycle slip detection thresholds calculated from the standard deviation, denoted as \(\pm 4{\sigma _{{\text{MW}}}}\left( i \right)\). The upper and lower valid range curves are obtained by adding or subtracting 1 from the thresholds, and only MW detection values that reside within the upper and lower valid range curves and experience a one-cycle slip can be detected. From Fig. 1, it is evident that due to noise influence, the MW combination values fluctuate significantly. Furthermore, some detection values are outside the upper and lower valid range curves. For one-cycle small cycle slips, if the sign of the MW combination error is opposite to the sign of the cycle slip value (i.e., a reverse cycle slip occurs), the error will weaken the cycle slip, causing it to be submerged and leading to missed detections. For example, in the case of the C03 satellite, among 1000 epochs, there were 16 epochs with errors, resulting in a false detection rate of 1.6%; for the C01 satellite, among 1000 epochs, there were 60 epochs with errors, resulting in a false detection rate of 6%.
MW combination cycle slip detection based on CEEMDAN decomposition combined with wavelet denoising
Using the MW combination for cycle slip detection may fail to detect small cycle slips. The fundamental reason lies in the MW combination’s use of pseudorange observations, which have high noise levels and interfere with the cycle slip signal. If the noise level of the MW combination detection value can be reduced and the mean and variance after noise reduction can be accurately estimated, it might be possible to detect small cycle slips more accurately and reduce missed detections. Wavelet transform, commonly used to process observational noise through multi-scale analysis of signal’s local characteristics, can effectively separate high and low-frequency components. However, wavelet transforms may not be sensitive enough to minor changes and complex local structures of the signal, especially when an inappropriate wavelet base or decomposition level is chosen, potentially leading to information loss. Therefore, CEEMDAN can initially be used to decompose the signal into several intrinsic mode functions (IMFs), each corresponding to different types of signal features and noise levels. By using the permutation entropy algorithm to select IMFs that require denoising, targeted noise reduction can be applied to these IMFs, thus more accurately removing noise while retaining more useful signals. Finally, the denoised IMF components are combined with the IMFs that do not require denoising to complete signal reconstruction.
CEEMDAN decomposition method
The Empirical Mode Decomposition (EMD) algorithm is a time-domain decomposition method for handling nonlinear and non-stationary signals flexibly, introduced by Huang in 199819. The EMD can adaptively “sift” the non-stationary signals according to the analyzed signals and decompose them into a series of IMFs arranged from high to low frequency. Each IMF is a narrow-band signal that represents characteristics with specific vibration frequency ranges and modulation amplitudes, reflecting the features of the original sequence at different time scales.
When decomposing a signal using the EMD algorithm, the process begins by identifying the signal’s local maxima and minima. Then, using cubic spline interpolation based on these extrema, upper and lower envelopes of the signal to be decomposed are obtained. Finally, the mean of these envelopes is subtracted from the original signal. If the resultant signal does not satisfy the conditions of an IMF, the signal minus the mean is treated as the new original signal and the sifting iteration continues. Each IMF extracted in the EMD decomposition must satisfy the following two conditions:
-
i.
Throughout the entire signal data sequence, the number of local extrema and the number of zero-crossings should differ by no more than one;
-
ii.
The mean of the upper and lower envelopes obtained from the difference at any point in time must be zero, indicating that the signal must exhibit local symmetry about the time axis.
When the decomposition is complete, the original signal is decomposed into a linear summation of m IMF components and one residual sequence, as shown in the following equation:
In the equation, \({c_m}\left( t \right)\) represents the IMF components, and \(r\left( t \right)\) represents the residual sequence.
Although the EMD algorithm is quite effective at decomposing complex signals, it suffers from the issue of mode mixing in practical applications20. To address this problem, several variants of the EMD algorithm have been proposed by different scholars. Wu21 introduced the Ensemble Empirical Mode Decomposition (EEMD). EEMD cleverly takes advantage of the uniform distribution of Gaussian noise in frequency, adds random white noise of equal amplitude to the original signal, performs multiple EMD decomposition, and finally performs an overall average of multiple IMF of the same order to offset the effect of adding white noise to the data. Although the EEMD method can improve the modal aliasing phenomenon in the EMD method, there are problems such as long calculation time and the need to set parameters based on experience. To improve the shortcomings of the EMD method, Zhou22 proposed the FAEMD method, and applied this method to deal with the loose fault signal of rotating machinery. The results show that the method can improve the modal aliasing phenomenon, endpoint effect, and termination criterion existing in the traditional EMD method to varying degrees while obtaining high-quality decomposition results. Compared with EEMD, FAEMD can save a lot of calculation time. Yeh J.R23. proposed the Complementary Ensemble Empirical Mode Decomposition (CEEMD), by adding white noise to each first-order component, the calculated residuals are used to obtain each modulus, which effectively suppresses the occurrence of modal aliasing effects. Torres24 introduced the Complete Ensemble Empirical Mode Decomposition with Adaptive Noise (CEEMDAN). The original data source will inevitably introduce noise during the sampling process, which will affect the performance of the prediction model. CCEMDAN adaptively adds white noise with opposite symbols to the original data source signal according to the data characteristics and each decomposition. By canceling each other between the opposite white noise and data noise, CEEMDAN can effectively suppress the noise interference in the original data source and improve the accuracy of the decomposition results. Among these improved algorithms, the CEEMDAN decomposition algorithm offers better completeness in signal reconstruction compared to other EMD methods; it effectively overcomes the issues of mode mixing and noise interference; and it requires fewer ensemble averaging iterations to obtain a complete representation of the original signal, thus enhancing the overall computation speed. Therefore, this paper utilizes CEEMDAN to decompose the MW detection values.
The basic steps of CEEMDAN are: add adaptive white noise with zero mean \({n_i}\left( t \right)\) to the original signal \(y\left( t \right)\), resulting in the ith preprocessed sequence represented as:
Decompose the preprocessed sequence \({y_i}\left( t \right)\) using the EMD algorithm to obtain IMF components. Average the IMF components from all preprocessed sequences to form the first IMF component \({c_1}\left( t \right)\) obtained by CEEMDAN decomposition, while also obtaining the first residual sequence \({r_1}\left( t \right)\):
Continue adding adaptive white noise with zero mean \({n_i}\left( t \right)\) to the residual sequence \({r_1}\left( t \right)\), forming a new signal \({r_1}\left( t \right)+{n_i}\left( t \right)\) to be decomposed. Then perform EMD decomposition on it to obtain the second mode component and residual sequence. Repeat the above process until the decomposition stops. Finally, decompose the original signal into a linear summation of m IMF components and one residual sequence.
When applying CEEMDAN, it’s necessary to configure the added white noise. In this paper, the Gaussian white noise added is set with a number of ensembles NR = 50 and standard deviation Nstd = 0.2.
Permutation Entropy Reconstruction Method
As discussed, CEEMDAN decomposition can thoroughly decompose MW detection values, yielding a series of subsequences with varying frequencies and a residual sequence. However, not all subsequences contain noise. As the frequency of the signal gradually decreases, the complexity of the fluctuations in the IMF components also diminishes, and the probability of these components containing noise decreases as well17. Therefore, after completing the CEEMDAN decomposition, the permutation entropy algorithm is used to evaluate the complexity or randomness of each IMF component to determine which IMF components need noise reduction. Permutation entropy is a method for measuring the complexity of time series by calculating the probability distribution of permutations within the series. In signal processing, IMF components with higher permutation entropy generally indicate that these components contain more noise or more complex signal components.
The specific steps for permutation entropy are as follows: First, reconstruct the phase space for a signal X of length N (i.e., the IMF components obtained from CEEMDAN decomposition), resulting in the matrix Y as:
Where, m represents the embedding dimension; t represents the delay time, and \(K=N - (m - 1)t\). Each row in the matrix Y is a reconstructed component, with a total of K reconstructed components. The elements within each reconstructed component are arranged in ascending order as follows:
Where, \({j_1},{j_2}, \cdots ,{j_m}\) represents the columns of the elements within the reconstructed component. The symbolic sequence can represent each reconstructed component as:
Where, \(l=1,2,\; \cdots ,k\) and \(k \leqslant m!\). In the m-dimensional phase space, \(m!\) types of symbolic sequence combinations can be mapped, such as shown in formula (14), which is just one possible permutation among them.
Assuming there are k different symbolic sequences occurring with probabilities represented by \({p_1},{p_2}, \cdots ,{p_k}\), the permutation entropy of the original signal X is calculated using the following formula:
Typically, formula (15) is normalized to obtain the final permutation entropy value:
The range of values for \({H_{{\text{PE}}}}\) is from 0 to 1, with higher values indicating greater complexity in the signal, which in turn suggests a higher probability of containing noise.
Based on the analysis above, when using permutation entropy to calculate the complexity of IMF components, it’s necessary to choose appropriate embedding dimensions m and delay times t. If the embedding dimension m is set too high, it will increase computation time while reducing sensitivity to minor changes in the signal; setting it too low, may lead to decreased accuracy. Bandt25 suggests choosing the embedding dimension between 3 and 7; this study selects 3 as the embedding dimension. As for the delay time, research by Zheng26 indicates that permutation entropy fluctuations are minimal when the delay time is between 1 and 6, thus this study selects 1 as the delay time.
Wavelet threshold denoising
Wavelet transform is a time-frequency analysis method that converts one-dimensional time-domain signals into two-dimensional time-scale signals. This process makes noise signals, which are typically difficult to observe in the time domain, become evident in the transform domain, facilitating signal processing. In practical measurements, useful signals and noise exhibit distinct characteristics in the wavelet domain: useful signals are more stable, and their energy is concentrated in a limited number of coefficients, often appearing as low-frequency components; meanwhile, noise signals are distributed throughout the wavelet domain, primarily appearing as high-frequency components. After performing a wavelet transform on a noisy signal, the wavelet coefficients of the useful signals increase with scale, whereas those of noise decrease. This distinction between the wavelet coefficients of useful signals and noise becomes apparent. Based on this characteristic, wavelet threshold denoising method applies threshold processing to the wavelet coefficients to achieve signal denoising.
Assuming a denoising threshold T, if the wavelet coefficients are less than T, they are considered to be primarily caused by noise and are therefore eliminated; if the wavelet coefficients are greater than T, they are considered to be primarily caused by the signal and are thus retained. Following this operation, the denoised signal sequence is obtained. Clearly, in the entire process, the choice of the wavelet, the selection of the threshold, and the denoising strategy are critical elements of wavelet threshold denoising.
Wavelet denoising methods include various wavelet functions, each differing in their capacity for signal decomposition and reconstruction. Among the many wavelet functions, the Daubechies series db4 wavelet transform is effective in removing noise while preserving the mutagenic point and step changes in the signal, ensuring that the main information and characteristics of the signal are retained27. Therefore, this paper utilizes the db4 wavelet transform to denoise the necessary IMF components, further enhancing the performance of MW combination detection values in cycle slip detection.
For threshold selection, commonly used methods include the Visushrink threshold, Sqtwolog threshold, Rigrsure threshold, Minmax threshold, and Heursure threshold28. Among these methods, the VisuShrink threshold employs a unified global threshold by removing all wavelet coefficients smaller than this threshold to achieve denoising. This method is suitable for handling various signal and noise levels and can effectively reduce the risk of overfitting. Therefore, this paper adopts the VisuShrink threshold \(T=\sigma \sqrt {2\ln \left( N \right)}\), where \(\sigma\) is the standard deviation of the noise, and N is the signal length.
Common strategies for threshold denoising include hard thresholding and soft thresholding. Soft thresholding offers good continuity and smoothness. However, when wavelet coefficients are large, the estimated wavelet coefficients have a fixed bias. Moreover, soft thresholding compresses all coefficients, and if the threshold estimation is inaccurate, errors will affect all coefficients. Since the soft thresholding loses some cycle slip information in terms of the smoothness, which is not conducive to the extraction of cycle slip features, this paper chooses to use hard thresholding as the denoising strategy. The hard thresholding function is:
Where, \({\omega _{j,k}}\) represents the wavelet coefficient; \({\bar {\omega }_{j,k}}\) is the estimate of the wavelet coefficient, and T is the VisuShrink threshold. When \(\left| {{\omega _{j,k}}} \right|\) is less than T, the coefficient is set to zero, effectively removing it as noise; when \(\left| {{\omega _{j,k}}} \right|\) is greater than T, the coefficient \({\omega _{j,k}}\) is retained, and considered to be part of the signal.
CEEMDAN decomposition combined with Wavelet Denoising improved MW combination cycle slip detection method
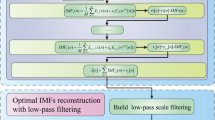
To summarize, the specific implementation steps of the improved MW combination detection method using CEEMDAN, permutation entropy, and wavelet threshold denoising are as follows:
-
1.
Based on formula (2), calculate the wide-lane ambiguity \({N_{{\text{MW}}}}\) of the MW combination;
-
2.
Use CEEMDAN decomposition to decompose \({N_{{\text{MW}}}}\) into several IMFs and a residual combination (CEEMDAN settings: number of Gaussian white noise ensembles (NR = 50); standard deviation (Nstd = 0.2));
-
3.
Use the permutation entropy algorithm to calculate the entropy values of all IMF components. If the calculated entropy is greater than a certain threshold, denoising is required. (Permutation entropy settings: embedding dimension = 3; delay time = 1; denoising threshold = 0.7);
-
4.
Perform wavelet threshold denoising on the IMF components that require noise reduction (Wavelet denoising settings: wavelet basis selected as db4; threshold selected as VisuShrink; denoising strategy chosen as hard thresholding);
-
5.
Obtain the denoised wide-lane ambiguity \({N_{{\text{TVD}}}}\) by combining the denoised IMF components with those that did not require denoising. Determine if a cycle slip has occurred by analyzing the difference between the current epoch and adjacent epochs, with the following criteria:
In the formula, \(\sigma\) is the cycle slip detection threshold. Based on the research by Jing29, the difference between adjacent epochs without weekly jumps is basically around 0.3. Thus, this study sets the detection threshold at 0.3. Obtain the denoised wide-lane ambiguity \({N_{{\text{TVD}}}}\) is as follows:

Noise reduction process.
After calculating the ambiguity of the denoising wide lane, Eqs. (18) and (19) can be used to determine whether cycle slip occurs.
Results and discussion
Based on Matlab2017b, the algorithm is programmed. The computer platform processor used is Intel (R) Core (TM) i7-8750 H CPU@2.20 Hz with 16GB memory. First, select the C03 satellite described in the previous text and introduce cycle slip values of (1,0) at the 100th, 200th, and 300th epochs; add cycle slip values of (0,1) at the 400th, 500th, and 600th epochs; introduce a cycle slip value of (2,0) at the 700th epoch; and insert a cycle slip value of (0,2) at the 800th epoch. Use both the MW combination detection method and the improved MW combination cycle slip detection method combining CEEMDAN decomposition with wavelet denoising to perform cycle slip detection, validating the advantages and effectiveness of the methods proposed in this paper. Figure 2 first presents the detection results of the MW combination values.

The cycle slip detection effect of C03 MW combination.
From Fig. 3, it can be seen that among the eight cycle slips introduced, the MW combination successfully detected only the one-cycle cycle slip introduced at the 100th epoch. Additionally, false detections occurred at the 203rd, 204th, 205th, 207th, and 209th epochs. The reason for this is that the MW combination failed to detect the one-cycle cycle slip introduced at the 200th epoch, leading to the recursive averaging process not being reset at the 200th epoch, resulting in false detections and causing the subsequent cycle slips introduced to be undetected.

The Results of CEEMDAN Decomposition of C03MW Combination Values.
Figure 4 presents the results of decomposing the MW combination detection values of the C03 satellite using CEEMDAN. From this figure, it is evident that after the CEEMDAN decomposition, the singular components in the detection quantity are distributed into several IMF components. The lower-order IMF components represent the high-frequency parts of the entire signal and are able to better highlight the cycle slip information. The IMF components that effectively highlight cycle slip information are mainly concentrated in the first four. Figure 4 shows the entropy values of each IMF component calculated using permutation entropy.

The permutation entropy values of various IMF components in C03.
From Fig. 5, it can be seen that, according to the threshold set, it is necessary to perform denoising on the first four IMF components. The other six IMF components do not require noise reduction. The IMF components after wavelet hard threshold denoising are shown in Fig. 6. Then, the first four processed IMF components are combined with the last six unprocessed IMF components, and the resulting reconstructed MW detection value is shown in Fig. 7.

Wavelet denoising effect of various IMF components in C03.

Wavelet denoising effect of the MW detection value in C03.
Combining Figs. 6 and 7, it can be observed that wavelet threshold denoising significantly reduces the noise level of the MW detection values while preserving the signal jump that occurs at the time of the cycle slip. Due to the use of CEEMDAN decomposition and wavelet threshold denoising, the useful signal in the reconstructed detection quantity is smoothed to a certain extent, accompanied by detail distortion. This also leads to cycle slip detection values exceeding the threshold range at several epochs before and after the epoch of cycle slip occurrence, causing cycle slip diffusion29. Therefore, subsequent methods involve comparing changes in the reconstructed cycle slip detection values between adjacent epochs to more accurately identify the epoch at which cycle slip occurs. Figure 8 presents the epoch-by-epoch differential results of the reconstructed MW detection values.

Epoch difference of C03 denoising MW detection value.
In Fig. 8, the red line represents the upper and lower thresholds set, and the blue line represents the differential values of the denoised MW detection values between epochs. According to Fig. 7, the cycle slip detection method that combines CEEMDAN decomposition with wavelet denoising, which improves the MW combination, compensates for the deficiencies of the MW combination. The denoised data is relatively clean. When a cycle slip occurs, the data jump is quite distinct, resulting in a high success rate for cycle slip detection without being affected by the previous epoch’s cycle slip detection result. All the simulated cycle slips added in the experiment were successfully detected.
To further validate the effectiveness of the cycle slip detection method proposed in this paper, we used the data from the C01 satellite mentioned earlier for comparative analysis, with the introduced cycle slips being consistent with those of the C03 satellite. Due to space limitations, Fig. 9 only shows the comparison of the cycle slip detection results of the original MW combination and the improved MW combination.

Epoch difference of C03 denoising MW detection value.
The results also confirm that the original MW combination is not sensitive to the detection of small cycle slips. If there are consecutive cycle slips in the observed data and the previous cycle slip is not successfully detected, the MW combination shows limitations in detecting subsequent cycle slips. In contrast, the improved MW combination cycle slip detection method, which combines CEEMDAN decomposition and wavelet denoising, is not affected by such issues and has a higher detection success rate. Compared to the detection results of the original MW combination, there are notable improvements.
Conclusions
When the MW combined value detects the cycle slip, it is affected by pseudo-range noise, resulting in missed judgments for small cycle jumps of 1 to 2 weeks. When the missed judgments occur, the threshold cannot be timely updated, resulting in misjudgments and missed judgments in subsequent detections, and continuous cycle jumps cannot be detected. Aiming at the above problems, an improved MW combined cycle slip detection method based on CEEMDAN, permutation entropy and wavelet threshold denoising is proposed. In this paper, the measured data are used to compare the MW combined value detection cycle slip with the improved MW combined method. The experimental results show that compared with the MW combination method, the improved MW combination method has a higher detection success rate, which can make up for the shortcomings of the MW combination method in detecting small cycle hops and the threshold diffusion caused by the failure of cycle hops detection. Specifically, the missed detection rate of the improved algorithm in the experiment is 0%, which is significantly better than the original MW combination method. In addition, in the experiment of this paper, the improved algorithm does not have false detection and missed detection.
This paper only studies the detection of MW combined cycle slip and its improvement methods, but it has not considered the combination with other cycle slip detection methods, nor has it discussed how to repair the detected cycle slip efficiently and accurately. The next step will be further improved from these two aspects.
Data availability
The authors confirm that the data supporting the findings of this study are available within the article and its supplementary materials. The Compass satellite data analyzed in this study are managed by the School of Surveying and Land Information Engineering, Henan Polytechnic University and can also be available on request from the corresponding author.
References
Long, F., Hanzhu, W. & Yukuan, W. The Improved Dynamic Cycle Slip Processing Method. Hydrographic Surveying Charting. 31, 13–16 (2011).
Wang, J. & Huang, D. Dual-frequency GPS cycle slip detection and repair based on dynamic test. KSCE J. Civ. Eng. 27, 5329–5337. https://doi.org/10.1007/s12205-023-0388-2 (2023).
Xiao, G. et al. Improved time-differenced cycle slip detect and repair for GNSS undifferenced observations. GPS Solutions. 22, 6. https://doi.org/10.1007/s10291-017-0677-7 (2017).
Klobuchar, J. A. Ionospheric Time-Delay Algorithm for single-frequency GPS users. IEEE Trans. Aerosp. Electron. Syst. AES-23, 325–331. https://doi.org/10.1109/TAES.1987.310829 (1987).
Hofmann-Wellenhof, B., Lichtenegger, H. & Collins, J. Global Positioning System: Theory and Practice (Springer Science & Business Media, 2012).
Zhao, J. et al. Dual-frequency GNSS observations cycle slip detection and repair method using the Ensemble Hatch–Melbourne–Wübbena (HMW) Combination—Prophet Model. J. Indian Soc. Remote Sens. 51, 1937–1953. https://doi.org/10.1007/s12524-023-01722-z (2023).
Lilu, C., Xiaoju, W., Han, Y., lei, Y. & Dong, S. Research on detection and restoration of Beidou Cycle Silp based on Ionosphere residual method. J. Chengdu University(Natural Science). 36, 62–65 (2017).
Li, K. et al. A modified cycle slip detection method with GNSS Doppler assistance and optimizing by adaptive threshold and sliding polynomial fitting. Int. J. Aerosp. Eng. 2023 (9421399). https://doi.org/10.1155/2023/9421399 (2023).
Cai, C., Liu, Z., Xia, P. & Dai, W. Cycle slip detection and repair for undifferenced GPS observations under high ionospheric activity. GPS Solutions. 17, 247–260. https://doi.org/10.1007/s10291-012-0275-7 (2013).
Changsheng, C. & Jingxiang, G. Cycle-slip detection and correction of GPS Data by Wavelet Transform. Geomatics Inform. Sci. Wuhan Univ. 32, 39–42 (2007).
Mingran, L., Tian, L. & biya, R. Application of Wavelet and Kalman Filtering Combination in GPS Cycle Slip Detection and Restoration. J. Geodesy Geodyn. 32, 76–78. https://doi.org/10.14075/j.jgg.2012.04.014 (2012).
Guobin, Q., yu, G., Lifen, S., Guorui, X. & Gankun, L. Improving the performance of M-W Combined Observation on Cycle Slip Detection using wavelet threshold de-noising. J. Geomatics Sci. Technol. 32, 22–26 (2015).
Yu, G., Lifen, S., Guobin, Q. & Jinjie, W. Improving the performance of Mw Combined Observation on Cycle Slip Detection using EMD threshold De-noising. J. Geodesy Geodyn. 35, 666–670. https://doi.org/10.14075/j.jgg.2015.04.027 (2015).
Hongda, L. Research on GNSS Cycle Slip Detection Technology, (2022).
Pengyu, R., Letao, Z., Xiaobo, G., Xue, L. & Wuxu, C. Global precision analysis of GNSS carrier phasr fast relative positioning. J. Navig. Position. 11, 120–127. https://doi.org/10.16547/j.cnki.10-1096.20230515 (2023).
Tao, G., Zhongxing, L., Xin, X., Zhuang, M. & Qile, Z. G. N. S. S. Receiver-related Pseudorange Bias determination method and its Effect on Positioning. Geomatics Inform. Sci. Wuhan Univ. 48, 1134–1145. https://doi.org/10.13203/j.whugis20210276 (2023).
Sükeová, L., Santos, M., Langley, R., Leandro, R. & Geremia-Nievinski, F. GPS L2C Signal Quality Analysis. (2007).
Blewitt, G. An automatic editing algorithm for GPS data. Geophys. Res. Lett. 17, 199–202. https://doi.org/10.1029/GL017i003p00199 (1990).
Huang, N. E. et al. The empirical mode decomposition and the Hilbert spectrum for nonlinear and non-stationary time series analysis. Proceedings of the Royal Society of London. Series A: Mathematical, Physical and Engineering Sciences 454, 903–995 (1998).
Qian, G. Photovoltaic Pwoer Prediction Based on CEEMDAN Decomposition with Multi-Objective Optimization LSTM (Xi’an University of Technology, 2023).
Wu, Z. & Huang, N. E. Ensemble empirical mode decomposition: a noise assisted dataanalysis method Center for Ocean land atmosphere studies. Adv. Adapt. Data Anal. 01, 1–41. https://doi.org/10.1142/S1793536909000047 (2009).
Yi, Z. & Hongguang, L. Basic principle of a fast and adaptive empirical mode decomposition and its performance evaluation. J. Vib. Shock. 35, 14–19. https://doi.org/10.13465/j.cnki.jvs.2016.03.003 (2016).
Yeh, J. R., Shieh, J. S. & Huang, N. E. Complementary ensemble empirical Mode Decomposition: a novel noise enhanced Data Analysis Method. Adv. Adapt. Data Anal. 2, 135-156 (2010).
Torres, M. E., Colominas, M. A., Schlotthauer, G. & Flandrin, P. A complete ensemble empirical mode decomposition with adaptive noise. IEEE International Conference on Acoustics, Speech and Signal Processing (ICASSP), 4144–4147 (2011).
Bandt, C. & Pompe, B. Permutation entropy: a natural complexity measure for time series - art. 174102. Phys. Rev. Lett. 88, 17 (2002).
Xiaoxia, Z., Guowang, Z., Haohan, R. & Yang, F. A rolling bearing fault diagnosis method based on variational mode decomposition and permutation entropy. J. Vib. Shock. 36, 22–28. https://doi.org/10.13465/j.cnki.jvs.2017.22.004 (2017).
Li, K.Z., Ban, H.F., Jiao, Y.X. & Lv, S.K. A Cycle Slip Detection and Repair Method Using BDS Triple-Frequency Optimization Combination with Wavelet Denoising. Int. J Aerospace Eng. 2022, 5110875. https://doi.org/10.1155/2022/5110875 (2022).
Nianxin, R. & Kunming University of Science and Technology. Radiated Noise Analysis of High-speed Train Based on Wavelet Threshold and EMD, (2018).
Xin, J., Jianwen, L., Linyang, L. & Shuhan, Z. Detection algorithm of BDS cycle slips based on total variational Mw combination denoising. Journal of Navigation and Positioninghttps://doi.org/10.16547/j.cnki.10-1096.20230221 (2023).
Acknowledgements
This work is funded by the National Natural Science Foundation of China (No. 41774039, 42204040), the Ministry of Education New Generation Information Technology Innovation Project (No. 2022IT183); the Postdoctoral Research Project First-Class Research Projects Funding of Henan Province (No. 202101037) and the Key Project of Science and Technology of Henan (No. 212102210085).
Author information
Authors and Affiliations
Contributions
Y.J. designed the experiments and wrote the main manuscript. K.L. and Z.Y. reviewed the manuscript. Y.J. and L.L. collected all experimental raw measurements. The experimental work is being established and maintained by H.B., C.T. and Y.S. All components of this research were carried out under Y.J. All authors have read and agreed to the published version of the manuscript.
Corresponding author
Ethics declarations
Competing interests
The authors declare no competing interests.
Additional information
Publisher’s note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
Open Access This article is licensed under a Creative Commons Attribution-NonCommercial-NoDerivatives 4.0 International License, which permits any non-commercial use, sharing, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons licence, and indicate if you modified the licensed material. You do not have permission under this licence to share adapted material derived from this article or parts of it. The images or other third party material in this article are included in the article’s Creative Commons licence, unless indicated otherwise in a credit line to the material. If material is not included in the article’s Creative Commons licence and your intended use is not permitted by statutory regulation or exceeds the permitted use, you will need to obtain permission directly from the copyright holder. To view a copy of this licence, visit http://creativecommons.org/licenses/by-nc-nd/4.0/.
About this article

Cite this article
Jiao, Y., Li, K., Yue, Z. et al. CEEMDAN combined wavelet denoising improved the MW cycle slip detection algorithm. Sci Rep 14, 23487 (2024). https://doi.org/10.1038/s41598-024-75433-x
Received:
Accepted:
Published:
Version of record:
DOI: https://doi.org/10.1038/s41598-024-75433-x
