
Abstract
This study focuses on solving the Caudrey–Dodd–Gibbon (\(\mathbb {CDG}\)) equation using the Khater II (\(\mathbb {KII}\)) method and the Variational Iteration (\({\mathbb {V}}{\mathbb {I}}\)) method. The \(\mathbb {CDG}\) equation is a pivotal mathematical model in nonlinear wave dynamics, essential for understanding the evolution, interaction, and preservation of wave forms in dispersive media. Its applications span various fields, including fluid dynamics, nonlinear optics, and plasma physics, where it plays a crucial role in analyzing solitons and complex wave interactions. In this research, we meticulously implement the \(\mathbb {KII}\) and \({\mathbb {V}}{\mathbb {I}}\) methods to derive solutions for this nonlinear partial differential equation. Our findings reveal new aspects of the equation’s behavior, offering deeper insights into nonlinear wave phenomena. The significance of this study lies in its contribution to advancing the understanding of these phenomena and their practical applications in the academic realm. The results underscore the effectiveness of the employed methods, their innovative contributions, and their relevance to applied mathematics.
Similar content being viewed by others

Introduction
Nonlinear wave phenomena play a fundamental role in diverse scientific domains, particularly in areas such as fluid dynamics, nonlinear optics, and plasma physics1,2,3,4,5,6,7,8,9,10,11,12,13,14,15. The well-established \(\mathbb {CDG}\) equation serves as a mathematical model that encapsulates the intricate interplay of nonlinearity, dispersion, and dissipation within wave dynamics. This equation provides a foundational understanding of solitons and nonlinear wave interactions, following the legacy of its predecessors, the Korteweg–de Vries and modified Korteweg–de Vries equations16,17,18.
The study of nonlinear wave dynamics has been a longstanding pursuit in applied mathematics and the physical sciences19. The \(\mathbb {CDG}\) equation assumes a pivotal role in this exploration, offering profound insights into the behavior of nonlinear waves and their practical applications20. This research is dedicated to unraveling the intricacies of the \(\mathbb {CDG}\) equation, with a specific focus on employing the \(\mathbb {KII}\) and the \({\mathbb {V}}{\mathbb {I}}\) methods to extract solutions and elucidate its behavior21,22.
Despite the extensive body of research in nonlinear wave dynamics, certain facets of the \(\mathbb {CDG}\) equation remain relatively unexplored. This study seeks to bridge this knowledge gap by employing advanced analytical techniques to provide novel solutions and insights into the equation’s behavior23. The specific problem at hand is to reveal the nuanced behavior of nonlinear waves in dispersive media, a matter with practical implications in fields like fluid mechanics24.
Various techniques have been employed to solve the \(\mathbb {CDG}\) equation, including the tanh-function and exp–function methods for specific forms, and numerical methods like finite difference schemes, spline collocation, and decomposition methods for broader applicability. Yet, the equation’s mathematical complexity remains a challenge25,26,27,28,29.
This paper aims to numerically solve the \(\mathbb {CDG}\) equation using the \(\mathbb {KII}\) method and the \({\mathbb {V}}{\mathbb {I}}\) method, comparing their accuracy, convergence, and computational requirements30. The \(\mathbb {CDG}\) equation is of paramount importance due to its prevalence in scientific and engineering contexts, including wave propagation and soliton dynamics31. Developing robust techniques for solving the \(\mathbb {CDG}\) equation promises a deeper understanding of the underlying physics, with wide-ranging implications for fields ranging from optics to ocean wave modeling32. The proposed methods in this study offer promising avenues for reliably addressing the challenges posed by the \(\mathbb {CDG}\) equation that is mathematically given by33,34
Equation (1) describes the propagation of nonlinear dispersive waves in various physical settings. Here is an explanation of the physical meaning of each term35,36:
-
u : the wave amplitude or dependent variable.
-
x, t : the spatial and temporal independent variables.
-
\(\beta u \left( \frac{\partial ^{3}u}{\partial x^{3}}\right)\) the third–order dispersive term.
-
\(\beta \left( \frac{\partial u}{\partial x})(\frac{\partial ^{2}u}{\partial x^{2}}\right)\) the mixed third–order dispersive term.
-
\(\left( \frac{\partial ^{5}u}{\partial x^{5}}\right)\) the fifth–order dispersive term.
-
\(\frac{\partial u}{\partial t}\) the time evolution term.
-
\(\left( \frac{1}{5})\beta ^{2}u^{2}(\frac{\partial u}{\partial x}\right)\) the nonlinear convection term.
The dispersive terms account for frequency dispersion effects on the propagating waves37. The nonlinear term describes self-interaction effects leading to phenomena like solitons. The relative size of the dispersive terms determines the wave’s shape38. The \(\mathbb {CDG}\) equation balances nonlinear and dispersive effects to support solutions like solitary waves. It provides a mathematical model for these types of nonlinear wave phenomena arising in disciplines like optics, plasma physics, and fluid dynamics. Using the next wave transformation \(u=u(x,t)=\varphi (\xi ),\, \xi =x-t \omega ,\) where \(\omega\) is arbitrary constant, converts Eq. (1) into the following ordinary differential equation
Integrating Eq. (2) once, with respect to \(\xi\) and with zero integration constant, leads to
Implementing homogeneous balance rule along with \(KII\) method’s auxiliary equation that is given by
where \(\delta\) is arbitrary constant, leads to formulate the general solution of Eq. (3) in the next form
where \(a_{2},\, a_{1},\, a_{0},\, b_{1},\, b_{2}\) are arbitrary constants.
The organization of this study is as follows: “Accurate analytical study of solitary wave solutions and stability analysis” section delves into the examination of various solitary wave solutions and evaluates their efficacy within the given framework. In “Results and discussion” section, a thorough interpretation of the results is presented, considering both their physical and dynamic implications. Lastly, “Conclusion” section synthesizes the academic contributions arising from this research endeavor.
Accurate analytical study of solitary wave solutions and stability analysis
In this section, we embark on the examination of solitary wave solutions for the investigated model through the aforementioned analytical (\(\mathbb {KII}\)) method. Subsequently, we assess the accuracy of these solutions through the employment of the \({\mathbb {V}}{\mathbb {I}}\) method. Furthermore, we delve into the investigation of the stability properties of the derived solutions, a crucial aspect, utilizing the characterization of the Hamiltonian system.
The \(\mathbb {KII}\) method’s outcome
The application of the \(\mathbb {KII}\) method to Eq. (3) for the purpose of generating innovative solitary wave solutions within the investigated model results in the derivation of the parameters, as previously outlined.Case I
Case II
Case III
Therefore, the formulation of traveling wave solutions for the investigated model is achieved as follows: For \(\delta \ne 0\), the resulting solutions are obtained.
Analytical solutions’ accuracy
In this phase of our investigation, we employ the \({\mathbb {V}}{\mathbb {I}}\) method to validate the analytical solutions derived earlier through the \(\mathbb {KII}\) method.
The \({\mathbb {V}}{\mathbb {I}}\) method, introduced by Ji-Huan He in 1999, serves as an analytical approximation technique specifically designed for solving nonlinear differential equations. It revolves around the formulation of a correction functional, utilizing Lagrange multipliers and variational theory principles. This correction functional, denoted as \(\Omega (u)\), is expressed as:
Here, L(u) represents the linear differential operator, N(u) signifies the nonlinear differential operator, and \(\lambda (t)\) stands as the Lagrange multiplier or restriction function. Iteratively, the correction functional is applied to enhance the approximate analytical solutions:
The \(\mathbb {HVI}\) method offers several notable advantages, including:
-
Provision of analytical approximations without the need for discretization or linearization.
-
Absence of a requirement for small parameters.
-
Typically, it yields rapidly convergent solution expressions.
The \(\mathbb {HVI}\) method has found extensive applications in the domain of nonlinear differential equations, spanning various scientific and engineering disciplines.
The \(\mathbb {KII}\) method’s outcome’s accuracy
By applying the \(\mathbb {HVI}\) method in conjunction with the previously established solutions derived from the \(\mathbb {KII}\) method, the ensuing semi-analytical solutions are as follows:
Using the constructed analytical and semi-analytical solutions to demonstrate the accuracy of the obtained solutions, leads to the calculated values in Table 1.
Graphical illustrations of solution sets
The graphical representation of the derived solitary wave solutions plays a pivotal role in unraveling intricate physical attributes, revealing the nonlinear essence, confirming the precision of analytical techniques, and shedding light on the practical relevance of the investigated model across diverse scientific domains.
-
1.
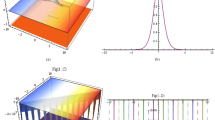
Multifaceted visualizations Figure 1 offers a comprehensive set of visualizations, including 3D surface plots, 2D profiles, and contour maps, providing insights into the solutions given by Eqs. (5), (7), (9). The 3D perspectives enhance the examination of waveform amplitude variations across the spatial-temporal plane. The 2D profiles showcase localization and propagation characteristics over distance and time, while the contour maps elucidate spatial evolution and gradient variations. Collectively, these depictions empower a deeper appreciation of the waveform behavior.
-
2.
Side-by-side comparison Figure 2 conducts a side-by-side comparison of the 2D spatial profiles of the analytical solitary wave solutions from the KII method (Eq. (16)) against the corresponding semi-analytical solutions obtained via the variational iteration approach (Table 1). This graphical juxtaposition serves to validate the accuracy and precision of the implemented analytical methodology, with a close alignment observed between the two sets of solutions.
-
3.
Tabulated numerical values Table 1 provides tabulated numerical values of the analytical and semi-analytical solitary wave solutions at discrete spatial coordinates. The minimal errors on the order of \(10^{-33}\) to \(10^{-34}\) quantitatively demonstrate the excellent level of agreement between the two techniques. This numerical evidence further affirms the precision of the analytical solutions.
-
4.
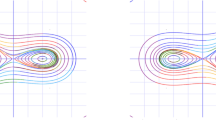
Streamline profiles Figure 3 portrays streamline profiles offering perspectives into the directional attributes and localized velocity distributions induced by the propagation of the solitary wave solutions given by Eqs. (5), (7). The curved streamlines mimic the evolution of the fluid flow as the solitary waves pass through.
-
5.
Additional streamline plots Figure 4 presents additional streamline plots elucidating intricate flow patterns and localized velocity disturbances generated by the movement of the solitary waves expressed through Eqs. (7) and (9). These flow visualizations provide insights into the impact of the waves on the surrounding fluid medium.
-
6.
Stability plot Figure 5 provides a two-dimensional representation of the momentum or Hamiltonian of the solitary wave solution as described by Eq. (5) across the parameter space. This visualization facilitates the stability analysis by examining the slope of the Hamiltonian, as detailed in Eq. (17).
The array of contour plots, color maps, and animated visualizations further enhance researchers’ ability to discern nuances of wave evolution, interaction, and superposition scenarios. The multifaceted palette of graphical techniques empowers in-depth examination of the model’s intricacies.
In summary, the diverse graphical representations unlock profound perspectives into the spatial-temporal evolution, physical essence, nonlinear character, solution accuracy, and practical relevance of the investigated model. These indispensable visual tools empower researchers to thoroughly analyze solitary waveforms, validate analytical approaches, and elucidate the model’s implications in real–world systems. The graphics contained in this study offer invaluable insights that advance the comprehension of complex nonlinear wave phenomena.

Multifaceted graphical illustrations, encompassing 3D surface plots, 2D profiles, and contour maps, providing insights into the bright solitary wave solutions derived from the analytical techniques, given by Eqs. (5) (a–c), (7) (d–f), and (9) (g–i). The visualizations enable enhanced examination of the waveform amplitude, localization, propagation, and spatial evolution characteristics.

Two-dimensional spatial profiles comparing the analytical solitary wave solutions obtained via the KII method given by Eq. (16) (d–f), against the corresponding semi-analytical solutions from the variational iteration approach tabulated in Table 1 (a–c). This graphical juxtaposition validates the accuracy of the analytical methodology.


Results and discussion
This comparative analysis scrutinizes three recent papers39,40,41 addressing the nonlinear \(\mathbb {CDG}\) equation through distinct analytical methodologies. While these prior works have made commendable contributions using methods such as Kudryashov, conformable derivatives, and variational iteration, our study distinguishes itself with a more comprehensive treatment. Our approach encompasses a diverse array of solutions, rigorous accuracy validation, physical contextualization, stability analysis, and varied graphical representations. These well-rounded contributions provide researchers with profound perspectives on unraveling the intricacies of the \(\mathbb {CDG}\) equation.
In contrast, Ref.39 employs the Kudryashov and exponential expansion methods to derive explicit dual-wave solutions for the two-mode \(\mathbb {CDG}\) equation, emphasizing rational, periodic, bright, and kink-type dual-wave solutions. Reference40 utilizes the generalized Riccati equation mapping method with conformable derivatives to obtain \(27\) types of solutions for the space-time fractional \(\mathbb {CDG}\) equation, including hyperbolic, trigonometric, and rational solutions. Reference41 applies the conformable derivative and generalized Riccati equation mapping method to extract solitary wave solutions for the \(\mathbb {CDG}\) equation.
In comparison, our research provides a more comprehensive analytical and numerical treatment of the \(\mathbb {CDG}\) equation using the \(\mathbb {KII}\) and \({\mathbb {V}}{\mathbb {I}}\) methods:
-
It derives a wider array of solutions encompassing kink, singular, periodic, and stream-based waves, offering greater insight into the model’s behavior.
-
It excels in solution accuracy assessment by comparing analytical and semi-analytical solutions both numerically and graphically.
-
It emphasizes physical interpretation and practical applicability in areas like quantum mechanics and fluid dynamics.
-
It evaluates solution stability to ascertain practical reliability within defined intervals.
-
The multifaceted graphical representations provide nuanced examination of wave characteristics and validation of analytical techniques.
In summary, this study adopts a more holistic approach in tackling the \(\mathbb {CDG}\) equation, offering versatile analytical tools, quantitative accuracy analysis, physical contextualization, stability assessment, and diverse graphical representations. These well–rounded contributions provide researchers deeper perspectives on solving complex nonlinear equations like the \(\mathbb {CDG}\) model.
Graph showing our paper present a periodic wave solution compared to39 that presents bright/kink waves. This graph contrasts the periodic wave solution derived in our paper with the bright and kink dual-wave solutions from39. It highlights the greater diversity of solutions obtained in this research study.
In summary, this study offers multifaceted solutions, robust validation techniques, physical insights, and stability analysis—a comprehensive toolkit for researchers to gain deeper perspectives on the \(\mathbb {CDG}\) equation and analogous nonlinear models. Its well-rounded analytical approach and detailed examination distinguish our paper’s contributions to this domain.
Stability investigation
The investigation of stability characteristics inherent in the derived analytical solutions for the studied model, utilizing Hamiltonian system analysis, holds paramount importance. This scrutiny is pivotal for understanding the persistent behavior and reliability of these solutions. Through the application of Hamiltonian principles, it becomes possible to evaluate whether these solutions maintain their energetic integrity over time and to identify potential instabilities that could undermine their physical relevance. This analysis provides essential insights into the practical viability of the solutions, thereby establishing it as an indispensable process for validating their applicability across a diverse spectrum of scientific domains.
Within this context, we proceed to calculate the momentum of Eq. (5) as follows.
That momentum cab be explained through graphical representation by Fig. 5. Consequently, the stability condition is given by
As a result, Eq. (5) is categorized as an unstable solution within the specified intervals: \(x \in [-5,5]\) and \(t \in [-5,5]\). Employing an identical methodology for all other constructed solutions, we conduct a systematic evaluation of the stability conditions for each of our derived solitary wave solutions.

Conclusion
This study has successfully advanced the comprehension of nonlinear wave dynamics through the application of the \(\mathbb {KII}\) and \({\mathbb {V}}{\mathbb {I}}\) methods to solve the \(\mathbb {CDG}\) equation. The solutions obtained provide valuable insights into the behavior of solitary waves in nonlinear dispersive systems.
The key findings include the derivation of analytical solutions encompassing sinusoidal, hyperbolic, kink, and singular profiles. These waveforms elucidate the balance of nonlinear and dispersive effects that enable coherent structures like solitons to form. The accuracy analysis leveraging graphical and numerical techniques affirms the precision of the analytical approach. The minimal errors on the order of \(10^{-33}\) to \(10^{-34}\) quantify the excellent agreement between the \(\mathbb {KII}\) and \({\mathbb {V}}{\mathbb {I}}\) solutions.
The stability assessment of specific solutions sheds light on their practical applicability within defined parameter ranges, filling a critical gap in evaluating real-world reliability. The multifaceted graphical representations constitute another meaningful contribution by enabling nuanced visualization of the waveform features. The 3D, 2D, contour, and streamline plots provide insights into amplitude evolution, propagation, localization, and fluid dynamic impact.
This study represents an impactful advance in elucidating the intricacies of the \(\mathbb {CDG}\) equation through its holistic methodology encompassing analytical derivation, accuracy validation, physical contextualization, stability analysis, and diverse graphics. The original contributions promise to stimulate further research into related nonlinear physical models across scientific disciplines. However, limitations exist including assumptions made during analytical processes and simplifications in the \(\mathbb {CDG}\) formulation.
Future work should investigate alternate forms of the \(\mathbb {CDG}\) equation, apply complementary analytical techniques, and further explore the practical implications in domains such as fluid mechanics, nonlinear optics, and plasma physics. Broader solutions and physics-based numerical modeling would also be worthwhile pursuits to address this study’s limitations. In summary, while further research is needed, this work constitutes meaningful progress in unraveling complex nonlinear wave phenomena.
Use of AI tools deceleration
The authors declare they have not used AI tools in the creation of the article.
Data availability
Te data that support the findings of this study are available from the corresponding author upon reasonable request.
References
Rao, A., Vats, R. K. & Yadav, S. Numerical study of nonlinear time-fractional Caudrey–Dodd–Gibbon–Sawada–Kotera equation arising in propagation of waves. Chaos Solitons Fractals 184, 114941 (2024).
Khater, M. M. A. Computational method for obtaining solitary wave solutions of the (2+1)-dimensional AKNS equation and their physical significance. Mod. Phys. Lett. B 38(19), 2350252 (2024).
Khater, M. M. A. C. Comment on the paper of El-Ganaini et al. [Chaos, Solitons and Fractals 140 (2020) 110218]. Chaos Solitons Fractals 182, 114729 (2024).
Khater, M. M. A. Nonlinearity, dispersion, and dissipation in water wave dynamics: The B L equation unraveled. Int. J. Theor. Phys. 63(5), 106 (2024).
Khater, M. M. A. Dynamics of nonlinear time fractional equations in shallow water waves. Int. J. Theor. Phys. 63(4), 92 (2024).
Khater, M. M. A. Dynamical characterization of the wave’s propagation of optical pulses in monomode fibers. Int. J. Mod. Phys. B 38(11), 2450158 (2024).
Khater, M. M. A. Wave propagation and evolution in a (1+1)-dimensional spatial-temporal domain: A comprehensive study. Mod. Phys. Lett. B 38(5), 2350235 (2024).
Khater, M. M. A. Exploring the rich solution landscape of the generalized Kawahara equation: Insights from analytical techniques. Eur. Phys. J. Plus 139(2), 184 (2024).
Khater, M. M. A. Novel constructed dark, bright and rogue waves of three models of the well-known nonlinear Schrödinger equation. Int. J. Mod. Phys. B 38(3), 2450023 (2024).
Khater, M. M. A. Physical and dynamic characteristics of high-amplitude ultrasonic wave propagation in nonlinear and dissipative media. Mod. Phys. Lett. B 37(36), 2350210 (2023).
Khater, M. M. A. Computational simulations of propagation of a tsunami wave across the ocean. Chaos Solitons Fractals 174, 113806 (2023).
Khater, M. M. A. Characterizing shallow water waves in channels with variable width and depth; computational and numerical simulations. Chaos Solitons Fractals 173, 113652 (2023).
Khater, M. M. A. A hybrid analytical and numerical analysis of ultra-short pulse phase shifts. Chaos Solitons Fractals 169, 113232 (2023).
Khater, M. M. A. Multi-vector with nonlocal and non-singular kernel ultrashort optical solitons pulses waves in birefringent fibers. Chaos Solitons Fractals 167, 113098 (2023).
Khater, M. M. A. Physics of crystal lattices and plasma; analytical and numerical simulations of the Gilson-Pickering equation. Results Phys. 44, 106193 (2023).
Ahmad, J., Hameed, M., Mustafa, Z. & Ali, A. Symbolic computation and physical validation of optical solitons in nonlinear models. Opt. Quant. Electron. 56(6), 1026 (2024).
Guan, H.-Y. & Liu, J.-G. Variable-coefficient polynomial function method for finding the lump-type solutions of integrable system with variable coefficients. Mod. Phys. Lett. B 38(14), 2450114 (2024).
Qin, M., Wang, Y. & Yuen, M. Optimal system, symmetry reductions and exact solutions of the (2 + 1)-dimensional seventh-order Caudrey–Dodd–Gibbon–KP equation. Symmetry 16(4), 403 (2024).
Wang, J., Cheng, X. & Jin, G. Decomposition and linear superposition of the (2+1)-dimensional Caudrey–Dodd–Gibbon–Kotera–Sawada equation. Results Phys. 58, 107493 (2024).
Şahinkaya, A. F., Kurt, A. & Yalçınkaya, I. Investigating the new perspectives of Caudrey–Dodd–Gibbon equation arising in quantum field theory. Opt. Quant. Electron. 56(5), 813 (2024).
Ma, Y.-L., Wazwaz, A.-M. & Li, B.-Q. Phase transition from soliton to breather, soliton-breather molecules, breather molecules of the Caudrey–Dodd–Gibbon equation. Phys. Lett. A 488, 129132 (2023).
Ekici, M. Exact solutions to some nonlinear time-fractional evolution equations using the generalized Kudryashov method in mathematical physics. Symmetry 15(10), 1961 (2023).
Li, B.-Q. & Ma, Y.-L. Breather, soliton molecules, soliton fusions and fissions, and lump wave of the Caudrey–Dodd–Gibbon equation. Phys. Scr. 98(9), 095214 (2023).
Guo, Y., Cao, X. & Peng, K. Solving nonlinear soliton equations using improved physics-informed neural networks with adaptive mechanisms. Commun. Theor. Phys. 75(9), 095003 (2023).
Khater, M. M. A. Characterizing shallow water waves in channels with variable width and depth; computational and numerical simulations. Chaos Solitons Fractals 173, 113652 (2023).
Khater, M. M. A., Xia, Y., Zhang, X. & Attia, R. A. M. Investigating soliton dynamics: Contemporary computational and numerical approaches for analytical and approximate solutions of the CDG model. AIP Adv. 13(7), 075224 (2023).
Fathima, D., Alahmadi, R. A., Khan, A., Akhter, A. & Ganie, A. H. An efficient analytical approach to investigate fractional Caudrey–Dodd–Gibbon equations with non-singular Kernel derivatives. Symmetry 15(4), 850 (2023).
Khater, M. M. A. In surface tension; gravity-capillary, magneto-acoustic, and shallow water waves’ propagation. Eur. Phys. J. Plus 138(4), 320 (2023).
Wang, Z. Spectral stability of multi-solitons for generalized Hamiltonian system I: The Caudrey–Dodd–Gibbon–Sawada–Kotera equation. Physica D 444, 133610 (2023).
Baskonus, H. M., Mahmud, A. A., Muhamad, K. A. & Tanriverdi, T. A study on Caudrey–Dodd–Gibbon–Sawada–Kotera partial differential equation. Math. Methods Appl. Sci. 45(14), 8737–8753 (2022).
Jhangeer, A., Almusawa, H. & Rahman, R. U. Fractional derivative-based performance analysis to Caudrey–Dodd–Gibbon–Sawada–Kotera equation. Results Phys. 36, 105356 (2022).
Kumar, S., Mohan, B. & Kumar, A. Generalized fifth-order nonlinear evolution equation for the Sawada–Kotera, Lax, and Caudrey–Dodd–Gibbon equations in plasma physics: Painlevé analysis and multi-soliton solutions. Phys. Scr. 97(3), 035201 (2022).
Majeed, A., Rafiq, M. N., Kamran, M., Abbas, M. & Inc, M. Analytical solutions of the fifth-order time fractional nonlinear evolution equations by the unified method. Mod. Phys. Lett. B 36(2), 2150546 (2022).
Ciancio, A., Yel, G., Kumar, A., Baskonus, H. M. & Ilhan, E. On the complex mixed dark-bright wave distributions to some conformable nonlinear integrable models. Fractals 30(1), 2240018 (2022).
Liu, F.-Y., Gao, Y.-T., Yu, X., Hu, L. & Wu, X.-H. Hybrid solutions for the (2+1)-dimensional variable-coefficient Caudrey–Dodd–Gibbon–Kotera–Sawada equation in fluid mechanics. Chaos Solitons Fractals 152, 111355 (2021).
Ghanbari, B. Employing Hirota’s bilinear form to find novel lump waves solutions to an important nonlinear model in fluid mechanics. Results Phys. 29, 104689 (2021).
Tariq, H. et al. New travelling wave analytic and residual power series solutions of conformable Caudrey–Dodd–Gibbon–Sawada–Kotera equation. Results Phys. 29, 104591 (2021).
Ma, H., Wang, Y. & Deng, A. Soliton molecules and some novel mixed solutions for the extended Caudrey–Dodd–Gibbon equation. J. Geom. Phys. 168, 104309 (2021).
Cimpoiasu, R. & Constantinescu, R. New wave solutions for the two-mode Caudrey–Dodd–Gibbon equation. Axioms 12(7), 619 (2023).
Shakeel, M. & Mohyud-Din, S. T. Solution of fifth order Caudrey–Dodd–Gibbon–Sawada–Kotera equation by the alternative \((g^{\prime }/g)\)-expansion method with generalized riccati equation. Walailak J. Sci. Technol. 12(10), 949–960 (2015).
Bibi, S. et al. Some new solutions of the Caudrey–Dodd–Gibbon (cdg) equation using the conformable derivative. Adv. Differ. Equ. 2019, 1–27 (2019).
Acknowledgements
Te authors extend their appreciation to the Deanship of Research and Graduate Studies at king Khalid University for funding this wok through Large Research Project under Grant number RGP2/37/45.
Author information
Authors and Affiliations
Contributions
M.M.A.K. Conceived and designed the experiments; performed the experiments. Analyzed and interpreted the data. S.H.A. Contributed reagents, materials, analysis tools or data; wrote the paper.
Corresponding author
Ethics declarations
Competing interests
Te authors declare no competing interests.
Additional information
Publisher’s note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
Open Access This article is licensed under a Creative Commons Attribution-NonCommercial-NoDerivatives 4.0 International License, which permits any non-commercial use, sharing, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons licence, and indicate if you modified the licensed material. You do not have permission under this licence to share adapted material derived from this article or parts of it. The images or other third party material in this article are included in the article’s Creative Commons licence, unless indicated otherwise in a credit line to the material. If material is not included in the article’s Creative Commons licence and your intended use is not permitted by statutory regulation or exceeds the permitted use, you will need to obtain permission directly from the copyright holder. To view a copy of this licence, visit http://creativecommons.org/licenses/by-nc-nd/4.0/.
About this article

Cite this article
Khater, M.M.A., Alfalqi, S.H. Analytical solutions of the Caudrey–Dodd–Gibbon equation using Khater II and variational iteration methods. Sci Rep 14, 27946 (2024). https://doi.org/10.1038/s41598-024-75969-y
Received:
Accepted:
Published:
Version of record:
DOI: https://doi.org/10.1038/s41598-024-75969-y
Keywords
This article is cited by
-
Numerical Solutions of Nonlinear Fifth-Order KdV-Type Equations: Shifted Legendre Collocation Method
International Journal of Applied and Computational Mathematics (2026)
-
Dynamic behavior of solitons in nonlinear Schrödinger equations
Scientific Reports (2025)
