
Abstract
In this work, the dynamic mechanical properties of concrete‒granite composites with various roughness interfaces were investigated via split Hopkinson pressure bar (SHPB) system to evaluate the impact resistance of the lining‒surrounding rock composite structure that is commonly present in rock engineering. The dynamic uniaxial compressive strength of the composite at an impact speed of 11.3 m/s may increase by 20.55% when the joint roughness coefficient (JRC) increases from 0 to 28.64 according to the experimental results. The JRC increased the strain rate effect of the composite but reduced the confining pressure effect. The relationships between the dynamic deformation parameters, such as the elastic modulus and critical strain, and the study variables, as well as the correlation mechanism between the macroscopic and microscopic failure morphologies of the composite and the stress‒strain curves, were investigated. A developed long short-term memory (LSTM) deep learning method was utilized to predict the dynamic stress‒strain relationships of the composites after 144 sets of experimental data were split into training and testing sets. The prediction issue of peak stress for the composites after varying time steps was presented to the recursive neural network LSTM, which was evaluated and compared with the traditional back propagation neural network (BPNN) and random forest (RF). The LSTM model showed the strongest prediction capacity when considering accuracy and predictive evaluation indicators. Compared with the BPNN model, the RF model was worse at capturing the viscoelastic plastic properties of the constitutive model while having superior assessment indicators.
Similar content being viewed by others

Introduction
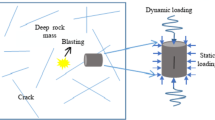
The combination of concrete liners and surrounding rock is frequent in many engineering projects, such as rock tunnels, subterranean engineering, and nuclear waste disposal facilities. These projects must consider the effects of dynamic loads such as mechanical vibration, explosive impact, and earthquakes during construction and operation. The confining pressure may also impact composite structures in deep rock mass engineering. The ability to quantify the influence of the lining on deformation and failure of the surrounding rock under dynamic impact loads, as well as the overall mechanical evolution characteristics of the composite body, serves as the foundation for engineering catastrophe prevention and mitigation1,2,3,4,5. Engineering scholars have conducted the following research on combined bodies. Yi et al.6 made unbonded and bonded bi-material models using concrete and mortar as materials and conducted axial compression tests. The findings showed that the interface bonding force constrains the circumferential strain of the material to a considerable extent. Thus, the bi-body model displays the mechanical properties of continuous media. Under various confining pressures, Zhao et al.7 reported that the contact surface constraint promoted the compressive strength of rock‒concrete composites. Xiang et al.8 monitored the strain of rock samples synchronously via a static strain testing system and fiber Bragg grating (FBG) testing method and analyzed the deformation and causes of sandstone, concrete and stone–concrete cementation faces under freezing‒thawing cycles. Selçuk et al.9 analyzed the failure modes and physical mechanical properties of rock–concrete materials under different stress states. Gao et al.10 validated the physical mechanism of the effect of interface roughness on the static compressive strength of concrete-granite composites on the basis of plane strain theory. Previous research results have shown that the mechanical properties of a composite are influenced by the contact features of the concrete‒rock interface, such as bonding and interface roughness.
Under low-intermediate strain rates, the compressive strength of concrete-like materials (such as concrete, mortar, and rock) increases as the strain rate and confining pressure increase11,12,13,14,15,16,17,18,19,20,21,22. The dynamic mechanical properties of the composite body are substantially different from those of the individual body because of the differences in the microstructures and mechanical characteristics of the concrete and rock, as well as the lateral stress limitations at the contact interface under axial loading. Guo et al.23 conducted a dynamic impact test of a concrete-red sandstone combined body and discovered that the bonded interface of a concrete-rock composite sample has a guiding effect on the propagation of cracks in the concrete to granite. According to the SEM findings, the dynamic failure mechanism of the composite sample is tensile failure. Chen et al.24 performed split Hopkinson pressure bar (SHPB) tests on a composite sample of rock-steel fiber − reinforced concrete and discovered that the combination strength improved as the steel fiber content in the concrete increased. However, the interface between the surrounding rock and the lining is generally uneven, and interfacial roughness affects the bond strength of the interface, especially interfacial cohesion25,26,27,28. Further research is needed on the impact of interface roughness on the dynamic compressive mechanical properties of composite materials.
Studying the constitutive law of materials is the foundation for the safety and stability of rock engineering. Reviewing the existing research on the dynamic elastic‒plastic constitutive relationship of rock materials29,30,31, most of the literature has focused on designing reasonable hardening rules depending on experimental phenomena to reproduce the experimental response curve. Simultaneously, the flow rule and external yield criterion often adhere to established functions, including the Von Mises yield surface and the related plastic flow. Therefore, from the perspective of artificial function fitting, neural networks have strong nonlinear fitting ability and can be used for modeling the stress‒strain relationships of materials. Compared with traditional constitutive models that rely on manually designed evolution equations, deep learning techniques with strong function approximation capabilities have become effective alternatives in recent years32, assisting more researchers in avoiding the complex knowledge system and long-term trial and error of constructing theoretical models, accelerating the transition from experimental research to practical applications, and achieving computational efficiency far beyond traditional constitutive models, such as BPNNs, gated recurrent units (GRUs), and convolutional neural networks (CNNs). A neural network (NN) model pertaining to the strain rate impact of concrete materials was first presented by Sungmoon Jung33. Liu et al.34 elaborated on the application of neural network models (ANNs) in the constitutive modeling of composite materials. However, owing to the physical bias in the output of ordinary ANN models, the inference ability for data outside the training data range is limited. The stress‒strain relationship can be regarded as a set of time series data. RNN data-driven models can take the role of conventional viscoelastic models for nonelastic issues that rely on the history of material deformation, as demonstrated by Chen35. The key feature of an RNN is memory, which can capture the temporal dependencies in sequence data. However, the vanishing and exploding gradient problems make it difficult for ANN models to handle long time step sequences. LSTM models have been proposed to solve this problem. Hard rock lithology36 and rock strength parameters37 have been predicted by several researchers using LSTM. Moreover, few studies have been conducted on the dynamic constitutive models of different rock types relating to rate effects and the stress state of a particular material to forecast the compressive strength value at a certain strain.
In this work, 144 sets of orthogonal dynamic tests were conducted on concrete‒granite composites with various confining pressures, strain rates, and interface roughnesses. On the basis of an examination of the mechanism of the stress state and interface properties on the dynamic mechanical behavior of the composite, the application of an LSTM deep learning model in predicting the dynamic stress‒strain relationship for the combined body is presented.
Experimental procedures
Specimen preparation
A composite sample of half concrete and half granite was used to study the impact mechanical behavior, as shown in Fig. 1(a). For this research, granite was procured from Beishan, Gansu Province, China, and was composed mainly of quartz, plagioclase, potash feldspar, calcite, mica and chlorite. Initially, the granite was processed into Φ48 × 25 mm cylindrical samples, and all of the rock samples were extracted from a single piece of rock. In addition, the groove method was used to cut symmetrical grooves on the granite surface. The number of grooves was 0, 2, 4, or 6. The groove width was 4 mm, and the groove depth was 3.46 mm. The geometric dimensions of the prefabricated groove are shown in Fig. 1(b). The joint roughness coefficient (JRC) was used to characterize the roughness of the interface. The JRCs of the four rough interfaces in Fig. 1(b) were calculated to be 0, 15.69, 25.84, and 28.64.

Morphology of (a) the composite sample and (b) groove shape on granite surface.
The granite sample was subsequently placed at the bottom of a plastic mold with a diameter of 48 mm and a height of 50 mm, and the mold was fixed with a clamp. The C35 concrete mixture was quickly put into the mold according to the concrete compression test procedure. The test mold was placed on a vibrating table and was vibrated for three minutes so that the concrete and the granite surface contacted well and mixed evenly. Table 1 shows the basic material mix proportions of the concrete. To conduct effective experiments, after the composite sample is produced, it is necessary to place the molded sample indoors at 25 ± 5 °C for 24 h and then remove the mold. After dismantling the framework, the concrete-granite composite sample must be immediately placed in a standard curing box for 28 days of curing. The end faces of the samples after standard curing were smoothed in a double-end smoothing machine. The sample processing and machining accuracy of the composite sample were in strict accordance with the methods specified in the National Standard for Rock Test Methods (GBT 50,266–1999).
Impact experiment
The SHPB device with active confinement utilized for dynamic compressive testing of the composite samples with various interface roughnesses is shown in Fig. 2. An active confining pressure generator was used to provide static radial pressure to the sample before the SHPB equipment applied a dynamic load. The bar system and bullet are made of 1.2 GPa high-strength steel with a 50 mm diameter. The bullet, incident, and transmission bars are 300 mm, 2500 mm, and 2000 mm long, respectively. The oil was pumped into the chamber to provide active pressure, which was applied equally to the sample via the sealing ring. The confining pressure settings were 0, 5, 10 and 15 MPa, and the three impact velocities were 5.4, 8.8 and 11.3 m/s. There were three sets of parallel experiments for every set of working circumstances.

Schematic of active confining pressure SHPB system.
The impact bar, incident bar, and transmission bar of the SHPB device are made of high-strength steel (Fig. 3). It is believed that during the testing process, the deformation of the bar is always elastic, satisfying the assumption of one-dimensional stress waves. Therefore, the propagation of stress waves in a sample and bar can be solved via one-dimensional elastic stress wave theory.

Calculation schematic.
According to one-dimensional stress wave theory, the force \(P_{1}\) and particle velocity \(V_{1}\) at the interface \(X_{1}\) between the sample and the incident rod are shown in Eqs. (1) and (2):
Similarly, the force \(P_{2}\) and particle velocity \(V_{2}\) at the interface \(X_{2}\) between the sample and the incident rod are shown in Eqs. (3) - (4).
Furthermore, the expressions for the average stress \(\sigma \left( t \right)\), strain rate \(\dot{\varepsilon }\left( t \right)\), and strain \(\varepsilon \left( t \right)\) of the sample can be obtained, as shown in Eqs. (5) - (7).
where \(C_{0}\) is the wave velocity of the bar; \(E_{0}\) is the elastic modulus of the bar; \(A_{0}\) is the cross-sectional area of the bar; \(L_{s}\) is the thickness of the sample; and \(A_{0}\) is the cross-sectional area of the sample.
If the stress and strain on the sample are in a uniform state, that is, if the force \(P_{1} = P_{2}\) at both ends, then the following formula is satisfied:
Therefore, Eqs. (5) - (7) can be simplified further to obtain new stress, strain rate, and strain values, as shown in Eqs. (10) - (12).
The stress balance of the composites is verified by examining the connection between incident (In), reflected (Re), and transmitted (Tr) waves, as illustrated in Fig. 4. The transmitted wave was almost equal to the total incident and reflected waves throughout the loading process, indicating that the composite sample fit the stress balancing criteria.

Stress equilibrium checks of composite with (a) JRC = 0 (b) JRC = 15.69 (c) JRC = 25.84 (d) JRC = 28.64 under uniaxial compression.
Analysis of the dynamic mechanical characteristics
Correlation mechanism between the mechanical behavior and failure modes
The study of the correlation mechanism between the mechanical performance and associated microscopic and macroscopic failure modes of composites aids in the analysis of material constitutive laws is performed. High strain rates can cause greater fragmentation of rock materials38. The stress‒strain curve and failure morphology of the composite material at an impact velocity of 11.3 m/s with JRC values of 0 and 28.64 are depicted in Fig. 5. Under uniaxial conditions, the failure of the composite sample tended to be axial splitting failure, and most fragments were present in combination. The damage degree of the concrete was much greater than that of the granite. The concrete component was essentially granular or powdery, and the granite component was a split block. The failure of the rock component was caused by the propagation of cracks through the bonding surface in the process of concrete component failure. When the confining pressure increased to 5 MPa, the composite sample retained integrity. Although the confining pressure effectively prevented fractures in the concrete and granite from propagating and penetrating, certain slanted tiny fissures could still be observed on the concrete surface. CT scanning revealed microcracks in the concrete and granite that were evenly distributed and not completely connected, with several holes in the concrete. The crack primarily extended along the interface between the coarse aggregate and cement mortar and then extended to the interface between the concrete and granite, resulting in the extension of the crack in the granite.

The failure mode of the composite sample with JRC is (a) 0 (b) 28.64 under different confining pressure and impact velocity of 11.3 m/s.
When the impact velocity is 11.3 m/s and the JRC is 28.64, the failure mode diagram and related σ-ε curve of the composite sample are shown in Fig. 5 (b). The rock components in the composite sample were divided into several blocks, and the concrete component was completely broken under uniaxial impact. Compared with the failure mode of the composite with a JRC of 0, the cone height was greater after the composite sample was crushed. In the process of longitudinal crack propagation, the interface bonding force and circumferential binding force provided by interface roughness can inhibit crack propagation to a certain extent, resulting in a greater height of the broken cone. When the confining pressure is 5 MPa, compared to those with JRC = 0, no macrocracks are found on the surface of the composite sample with a JRC of 28.64. According to the CT scanning results, the number of damage cracks in the granite was lower, and the integrity was better. The final strain value of the sample decreased, and the deformation of the sample exhibited a certain rebound and still had certain bearing capacity after unloading.
Rate effect mechanism
The strain rate of the sample under the uniaxial state ranged from 107 s-1 to 231 s-1, belonging to the high strain rate Sect. (102 − 103 s-1), when the impact velocity changed from 5.4 m/s to 11.3 m/s. However, the strain rate range of the composite sample is 39 s-1 ~ 118 s-1, which belongs to the medium strain rate Sect. (10 s-1) when the confining pressure range from 5 to 15 MPa. The dynamic compressive strength (DCS) of the composite sample is plotted against the strain rate logarithm in Fig. 6. The dynamic uniaxial compressive strength increased by 20.55% at the maximum impact rate when the JRC was altered from 0 to 28.64. When the impact speed increases from 5.4 to 11.3 m/s at a confining pressure of 15 MPa, the sample with a JRC of 0 experiences an increase in compressive strength of 48.28 MPa, and the DCS with a JRC of 28.64 increases by 65.79 MPa, indicating that the interface roughness improved the strain rate impact of the composite sample.

Variation law of dynamic triaxial compressive strength of the composite sample with (a) JRC = 0 (b) JRC = 15.69 (c) JRC = 25.84 (d) JRC = 28.64 under different confining pressures.
The trend of the DCS growth coefficient with the strain rate as a function of the confining pressure is shown in Fig. 7. The JRC has a positive effect on the strain rate of a sample under both uniaxial and confining pressure conditions. The strain rate was in the medium strain rate range when the confining pressure was 5, 10, or 15 MPa, and there was minimal variation in the strain rate under the same impact velocity. Therefore, a single-factor impact study of the link between the strain rate effect and confining pressure may be performed. The strain rate effect of the composite increased with increasing confining pressure in the medium strain rate range (41 s-1 − 118 s-1). The findings demonstrated that when the strain rate was less than 102 s-1, the transverse inertial restraint effect, not the rate sensitivity of the materials, was responsible for the DCS augmentation of the concrete materials at low and medium strain rates in the SHPB experiment39. Constricting pressure may help in increasing the strength of concrete-granite biomaterials by reducing the propagation and penetration of fractures. However, under confining pressure, lateral deformation is restricted, reducing the inertia effect generated by lateral deformation. As a result, the impact of the confining pressure on the strain rate effect of DCS is positive under the competitive mechanism, resulting in the strain rate effect of DCS increasing with increase in confining pressure.

Variation law of strain rate effect coefficient of specimens with different roughness under confining pressure.
When the elastic wave reaches the interface, it propagates to two media, namely, the reflection and transmission of the wave. The reflection coefficient and transmission coefficient are determined by the damping ratio of the two media. When the stress wave is transferred from the hard medium to the soft medium, a reflected tensile wave is generated, and when the stress wave is transferred from the soft medium to the hard medium, a reflected compressive wave is generated. Therefore, when the compressive stress wave generated in the incident bar successively passes through interface I (between the incident rod and concrete), interface II (between the concrete and granite), and interface III (between the granite and transmission bar), the reflected tensile wave, reflected compression wave and reflected compression wave are generated, respectively. Research in Refs.22 showed that the interface roughness was conducive to improving the bonding strength of the concrete-granite interface. When the impact speed was constant, the greater the interface roughness, the stronger the ability to resist tensile waves. During the actual test process, the composite sample with JRC = 0 was directly disconnected at the bonding interface after high-speed impact. Therefore, the interface roughness improved the tensile capacity of the composite sample, increased the contact area of the interface, and was conducive to the propagation of stress waves in the composite sample. On the other hand, the roughness improved the mechanical bite force of the composite sample at the interface and effectively inhibited the propagation of cracks at the interface. The rapid increase in the interface stress offsets and dissipates the energy applied by the external impact load, which is conducive to improving the overall compressive strength of the sample.
The trend of the DCS with respect to the confining pressure is depicted in Fig. 8, and the link between its coefficient of change and impact velocity is shown in Fig. 9. The impact velocity is positively correlated with the strain rate. The coefficient is shown to increase as the strain rate increases. As a result, when a medium strain rate is applied, the confining pressure has a positive effect on the composite strength. Nonetheless, when the roughness increases, the coefficient of the DCS decreases. The inclusion of interface roughness improved the interlocking ability of the concrete and granite in the composite sample but did not promote the development of the confining pressure effect. Some research has been conducted on the influence of the strain rate on concrete or granite monomer materials. The strain rate effect of plain concrete decreased gradually with increasing confining pressure in the middle and high strain rate stages, according to reference40, but the strain rate effect of rock increased with increasing confining pressure, according to reference41. The study findings in Refs.22 on the confining pressure effect of the DCS of materials in various strain rate ranges were generally discrete. As a result, the response to the confining pressure or strain rate is determined by the material itself.

The variation relationship between DCS and confining pressure of the composite sample with (a) JRC = 0 (b) JRC = 15.69 (c) JRC = 25.84 (d) JRC = 28.64 in different strain rate ranges.

The variation law of confining pressure effect coefficient with impact velocity.
Strength and deformation parameters
The dynamic elastic modulus under different stress states is shown in Fig. 10. The relationship between the elastic modulus and strain rate is not obvious when the confining pressure is constant. The elastic modulus varies between 20 and 45 GPa with different confining pressures. Compared with those of the compressive strength, there is relatively little correlation between either the confining pressure effect or the strain rate effect on the dynamic elastic modulus of the composite . The dynamic elastic modulus, instead, is mainly due to the incomplete pressure balance during the linear elastic stage. There are few investigations on the two effects of the dynamic elastic modulus of composites. On the basis of experimental research, the variation relationships of the elastic moduli of cement-based materials13,15,16 and rock materials18,20,21,22 with the strain rate are given in the literature; however, the results are relatively discrete.

The relationship between elastic modulus of the composite sample with (a) JRC = 0 (b) JRC = 15.69 (c) JRC = 25.84 (d) JRC = 28.64 and strain rate under different confining pressures.
The peak strain is a crucial metric in assessing dynamic deformation and failure in concrete-like materials. The connection between the critical strain and strain rate of samples with various roughnesses under confining pressure is shown in Fig. 11. After impact, the composite sample was undamaged. The peak strain increased as the strain rate increased, and the confining pressure increased the deformation resistance of the sample. The static peak strain of the concrete materials increased with increasing confining pressure in Refs.42, indicating that the dynamic mechanical properties of the materials were significantly different from those of static materials.

The relationship between critical strain and strain rate (under confining pressure).
Application of data-driven methods in constitutive models
LSTM deep learning model
On the basis of elastic‒plastic theory, the formula for the coupled constitutive model of composite materials considering the strain rate is as follows: \({\varvec{\sigma}}{ = }\user2{D\varepsilon }^{e} = (1 - \omega ){\varvec{D}}_{0} ({\varvec{\varepsilon}} - {\varvec{\varepsilon}}^{p} )\), where \(\omega\) is the damage variable; \({\varvec{\sigma}}\) is the stress column vector; \({\varvec{D}}_{0}\) is the undamaged elastic stiffness matrix; and \({\varvec{D}}\) is the damage elastic stiffness matrix. The numerical implementation of the elastic‒plastic damage constitutive model is the process of calculating the stress \({\varvec{\sigma}}_{n + 1}\) at time \(t_{n + 1}\), given the stress \({\varvec{\sigma}}_{n}\), strain increment \(\Delta {\varvec{\varepsilon}}_{n + 1}\), effective plastic strain \(\gamma_{n}^{p}\), and damage variable \(\omega_{n}\) at time \(t_{n}\). The complexity of the composite interface increases the computing difficulties of conventional numerical algorithms, and the laws of hardening and damage variables of the composite under various stress states differ. The paper suggests a constitutive model for composite materials based on the LSTM algorithm to address this problem. The recursive neural network LSTM model, which can model data with short-term or long-term dependencies, was first proposed by Hochreiter et al. Later, Graves et al. improved the LSTM unit by introducing forget gates, enabling the LSTM model to learn continuous tasks and reset internal states. As shown in Fig. 12, the LSTM unit contains three types of gates: input, forget, and output. The LSTM stores and updates data through these gates, which may be thought of as a fully connected layer. The output value of each neuron is as follows:
where, \({\varvec{i}}\), \({\varvec{f}}\), and \({\varvec{o}}\) represent the input gate, forget gate, and output gate, respectively; \(\odot\) represents the product of the corresponding elements; and \({\varvec{W}}\) and \({\varvec{b}}\) represent the weight matrix and bias vector of the network, respectively. The input and output vectors of the LSTM hidden layer are \({\varvec{x}}_{t}\) and \({\varvec{h}}_{t}\), and the memory unit is \({\varvec{c}}_{t}\) at time \(t\).

The unit structure of LSTM.
The Pearson correlation coefficient is introduced to quantify the correlation between different influencing factors43. Figure 13 shows the correlation coefficient heatmap. The correlation coefficient between the confining pressure and strain rate is -0.66, which is a moderate correlation. There is essentially no correlation between the confining pressure and the interface roughness or between the strain rate and the interface roughness.

Feature correlation Heatmap.
Simulation steps
The constitutive model of the composite can be represented as \({\varvec{\sigma}} = {\varvec{f}}({\varvec{JRC}},{\varvec{P}},{\varvec{V}},{\varvec{\varepsilon}})\). In SHPB dynamic impact, the direction of the axial dynamic load is the direction of the maximum principal stress, that is, \(\sigma = \sigma_{1}\), \(\sigma_{2} = \sigma_{3} = P\), and \(\varepsilon = \varepsilon_{1}\). Conventional constitutive models require the establishment of elastic‒plastic frameworks, flow rules, update mapping rules, and hardening rules that consider accelerated failure of composite materials. By extracting possible correlations and patterns from data, machine learning may surpass the complexity limit of conventional artificial elastoplastic constitutive models and approximate any continuous function with arbitrary precision. This procedure maintains the simplicity, directness, and efficiency of data-driven technology without requiring consideration of the precise form of the underlying theoretical constitutive model or conventional sophisticated numerical implementation.
The training simulation samples for the recurrent neural network LSTM are obtained via stress‒strain sequence data of concrete‒granite composites under various construction situations. By learning the constitutive relationship of the material and storing this complex relationship in the weight of the connection layer, the primary processes are determined to be data preparation, model architecture selection, and weight optimization.
Data preparation and training parameters
The stress‒strain relationship of a composite is closely correlated with its own state (interface roughness) and external load circumstances (impact rate and confining pressure), and all training data originate from experimental data. As such, the state parameters and load conditions of the composite need to be known ahead of time (as part of the input data) when building an LSTM model. Considering the actual loading situation of the composite body, which first applies constant confining pressure, followed by axial dynamic impact load, the determination of the constitutive behavior of the composite through the LSTM method can be transformed into determining the principal stress \(\sigma_{1}^{t}\) at this moment on the basis of the axial principal stress \(\sigma_{1}^{t - 1}\) at the previous moment, interface roughness \(JRC^{t}\), confining pressure \(\sigma_{3}^{t}\), impact velocity \(V^{t}\), and strain \(\varepsilon_{1}^{t}\) at the moment. The peak compressive strength of the composite body under the current stress state is shown in Fig. 14, which has important engineering application value for evaluating the defense ability of the tunnel lining. A total of 144 sets of experiments were performed in this research, with 108 samples used for the training dataset and 36 samples used for the testing dataset. The testing set corresponds to 12 sets of operating conditions, as shown in Table 2. The training sets comprise the remaining test conditions. There are 150–300 pairs of stress–strain data for every sample since there are 150–300 loading steps per sample. As a result, the training set has 16,200–32,400 pairs of stress–strain data, whereas the testing set contains 5400–10,800 pairs.

LSTM neural network architecture design.
Notable variances exist between the stress‒strain data, all of which can affect the learning ability of the prediction model. Therefore, all the input data are converted to the [0, 1] interval during the preprocessing step via the max–min normalization approach.
Model parameter
The paper implements deep learning models (LSTMs) via open-source Python tools, such as the Scikit Learn and Keras deep learning libraries. When the dataset is simple but the model is complicated, overfitting may occur. In contrast, when the dataset is complicated but the model is simple, underfitting frequently occurs. The architecture of the LSTM network is represented by the number of hidden layers (LSTM layers and fully connected hidden layers) and the number of neurons in each layer. To select an appropriate network model, the optimal hyperparameters of the proposed LSTM model can be determined by adjusting the number of hidden layers and neurons, as shown in Table 3.
LSTM models with different numbers of neurons performed 40 iterations on processed data, and the MAE loss curve of the training process is shown in Fig. 15. The MAE loss during testing decreases as the number of neurons in the hidden layer of the model increase. The MAE loss value essentially achieved a synchronous and steady drop by the 20th testing cycle, and by the 40th round, the curve had essentially become horizontal. The model has fully converged, its accuracy is at its greatest, and its loss has been lowered to the lowest value.

Changes in loss values of LSTM models with different neurons.
Test indicators
The “closeness” between the observed and projected stress levels was assessed via goodness of fit (R2), the root mean square error (RMSE), and the mean absolute percentage error (MAPE) to confirm the efficacy of the suggested LSTM model on the dynamic constitutive model of composite materials.
where, the larger \(R\) is, the better the prediction performance of the model, and the maximum value of \(R\) is 1; \(f(x)\) represents the predicted value, \(y_{i}\) represents the actual value, and \(n\) is the sample size. The smaller the RMSE and MAPE values are, the better the correlation between the simulated and predicted values.
Machine learning algorithms need to optimize the damage function through optimization algorithms to find the optimal parameters. This paper uses the adaptive optimization algorithm in the Adam optimizer, which can adjust the learning rate on the basis of historical gradient information. It improves the training effect by combining the concepts of two optimization techniques, RMSProp and momentum, and normalizing the parameter changes to give each one a comparable size. In several real-world scenarios, the Adam optimizer has strong performance, particularly in deep neural network training on extensive datasets.
Simulation result analysis
Prediction of constitutive models for composites
The proposed LSTM model is applied for constitutive model prediction of test samples, as shown in Fig. 16. The R2 and MAPE of the training and testing datasets are displayed in Fig. 17, with the training set represented by black bars and the testing set by red bars. The highest MAPE value of the training set is 12.74%, whereas the maximum MAPE value of the testing set is 3.26%. The R2 of the 12 training and testing datasets is greater than 99.91%. The MAPE of the training set is greater than that of the testing set, and the average absolute relative error of the 12 stress‒strain samples tested is less than 4%. This indicates that the predicted values of the LSTM model are very consistent with the mechanical experimental values. Overall, the proposed model achieved excellent simulation results for lower parameters and shallower layers. Notably, the evaluation metrics for each training set corresponding to each test sample are different because the training data in each round are disrupted.

Comparison of stress–strain relationship between LSTM model prediction and original experimental data.

Calculation index charts for different test samples.
To better demonstrate the engineering value of the constructed model, several other machine learning models were designed for comparison with the deep learning models proposed in this chapter, namely, BPNN and RF. All the models were experimentally validated on the same dataset, predicting \(\sigma_{1}\) after 5-ime steps, 10-time steps, 20-time steps, and 40-time steps. The practical significance of this approach is that the compressive strength of the concrete‒granite composite can be obtained by knowing its stress state and strain. The hyperparameters of each algorithm in the stress‒strain constitutive model of the training prediction composite sample are shown in Table 4.
Prediction results after different time steps
The LSTM, BPNN, and RF models were input into 108 training datasets and 36 testing datasets, respectively. The test index values of \(\sigma_{1}\) were computed from the prediction results of each model at various time steps. The MAPE value distributions of these models were compared via a box plot, and the results are shown in Fig. 18. The LSTM model outperforms the other two traditional regression models in terms of the MAPE median (box horizontal line) and distribution (box width). The total average RMSE, MAPE, and R2 values for the models on the training and testing sets are listed in Table 5. After 5-time steps, the overall average RMSE values of the LSTM model in the training and testing sets decreased by 79.47% and 74.71% and 20.64% and 12.22%, respectively, compared with those of the BPNN and RF models. In predicting samples after 40-time steps, the overall average RMSE values of the LSTM model in the training and testing sets decreased by 86.29%, 83.90%, 33.26%, and 13.36%, respectively, compared with those of the BPNN and RF models. The prediction abilities of all three models decrease with increasing expected future time step. In contrast, the LSTM model still performs better because it takes into account the historical mechanical properties of materials.

Box plots of MAPE values for LSTM, BPNN, and RF models in training and testing data (a) after 5 time steps (b) after 10 time steps (c) after 20 time steps (d) after 40 time steps.
The prediction results of the three neural network models on the test samples after different time steps are displayed in Fig. 19. After 5-time steps, the output stress curves of all the three models fit the actual output stress curve of the composite well. Upon reaching 20-time steps, the three models exhibited disparate simulation capacities. The predictive capacity of the three models is rated as follows: the LSTM model is the best, followed by the RF model, and the BPNN model is the poorest, according to the examination of test indicators for various algorithms. However, the ability to capture various characteristic stages of the stress‒strain relationship, such as the linear elastic stage, plastic stage, peak stage, and postpeak stage, is poor, even though RF has better test indicators than BPNN in terms of stress prediction after different time steps, and the overall prediction curve is not smooth, making it impossible to determine the deformation stage characteristics of the composite material. Furthermore, considering the time cost, RF has the highest computational efficiency. This is due to the different algorithm principles of RF and BPNN. The RF algorithm generates multiple different datasets by sampling the dataset, trains a classification tree on each dataset, and finally combines the prediction results of each classification tree as the prediction result of the random forest. The algorithm increases the randomness in the tree generation process, thereby reducing overfitting. The BPNN algorithm continuously iterates weights by optimizing functions and can also predict data beyond the data interval, making it superior to the RF algorithm in curve fitting. A comprehensive comparison reveals that the LSTM model contains unit structures such as forget gates, which are more suitable for processing time series data; while RF does not have this structure and is better at regression prediction.

Comparison between the actual and predicted stress values of test specimens after the same time step.
The probability distributions of the errors between the original and predicted stress values at different time steps for the three models in the training and testing sets are shown in Fig. 20. The probability density functions of the error values in the different time step prediction simulation results all follow a normal distribution. Compared with the other two models, the LSTM model predicts an error value with a narrower normal distribution curve width. The 95% confidence intervals for the error values of the LSTM model, BPNN model, and RF model in the training set are [-0.96, 0.94], [-4.15, 2.63], and [-5.22, 3.24], respectively, and those in the testing set are [-3.94, 5.68], [-4.02, 8.00], and [-4.46, 4.32], respectively, when the prediction time step is 5. Owing to the modest amount of data in the test set, it is evident that there is little variation in the 95% confidence interval between the LSTM and RF models. However, from the simulation of the overall characteristic stage of the stress‒strain curve of the composite sample, the LSTM model performs better.


Error distribution diagram of training and testing sets in experimental data.
The number of trainable weights in different neural network models is calculated via the following formulas:
where, \(Num_{BP}\) and \(Num_{LSTM}\) are the number of trainable weights of the BPNN and LSTM neural networks, respectively; \(L\) represents the number of layers in the neural network (including the input and output layers); \(N_{l}\) represents the number of nodes in the lth layer; \(N_{ahead\_LSTM}\) represents the number of nodes in the layer ahead of the LSTM layer; \(N_{LSTM}\) represents the number of nodes in the LSTM layer; and the others represent other layers except for the LSTM layer in the LSTM model.
According to Eqs. (22) and (23), the number of trainable weights is 1920 and 5461 in the BPNN and LSTM models, respectively, in the laboratory test. Regarding the size of the datasets, there are 16,200 to 32,400 input–output pairs in the training dataset and 5400 to 10,800 input–output pairs in the test dataset, as mentioned in the laboratory test. Each input–output pair in the training dataset contributes to the weight gradient calculation in the training process. The amount of training data exceeds the number of trainable parameters. Therefore, the training data contains sufficient features with respect to the number of trainable weights in the two experiments.
Enlightenments from existing research
Previous studies2,3,4 have focused mainly on the dynamic mechanical properties and constitutive equation establishment of concrete monomers under different strain rates, temperatures, and confining pressures. However, the dynamic compressive strength of concrete‒granite composites is also affected by interface bonding effects and rock components10. The proposed dynamic constitutive model of concrete-granite composites based on the LSTM method can estimate the compressive strength of concrete under predicted strains on the basis of available actual parameters (confining pressure, interface roughness, impact velocity or strain rate, predicted strain, and axial compressive strength of materials under small deformations), which is useful in controlling the blasting parameters of the face and protecting the initial support near the excavation area from damage. Blasting damage has practical and theoretical guiding significance. However, several limitations remain: when the dynamic compressive strength of composite samples is predicted under unknown working conditions for more than 40 time steps, although the LSTM model outperforms the BPNN and RF models, the accuracy of the LSTM model prediction is relatively low. With the advancement of science and technology, improving and optimizing machine learning constitutive models to increase accuracy and simplicity has enormous potential.
Conclusions
Through dynamic impact mechanical testing of the concrete‒granite composites, the coupling connection between the interface roughness and two prevalent phenomena in material dynamics (the strain rate and confining pressure effect) were analyzed. The application of the data-driven LSTM model in the dynamic constitutive model of composites was investigated. The main conclusions are as follows:
-
1.
Interface roughness and confining pressure affect the failure mode and strain rate of concrete‒granite composites. The confining pressure has a negative correlation with increasing JRC and a positive correlation with the strain rate. There is no strong correlation between the dynamic elastic modulus, confining pressure, or strain rate of composites with varying JRCs. The critical strain increases as the strain rate increases under confining pressure, but is insensitive to changes in the interface roughness and strain rate in the uniaxial state.
-
2.
A dynamic constitutive LSTM-based model for composites under different stress constraints was proposed. The developed model exhibits excellent performance in predicting the stress‒strain relationships obtained from experiments, with R2 values of above 99.91% for both the training and testing sets and a MAPE below 0.12 and 0.03 for the training and testing sets, respectively (with a prediction step of 1).
-
3.
The efficacies of recursive neural networks (LSTMs) and traditional algorithms (BPNN and RF) in predicting the stress‒strain relationships of composites at various time steps were compared. Its significance lies in knowing the stress state and interface characteristics and predicting the dynamic compressive strength of the combined body at a fixed strain value.
-
4.
The simulation results of the error evaluation indicators, such as the RMSE, MAPE, R2, and accuracy, on the training and testing sets indicate that the LSTM model has the best predictive ability. However, when the prediction step size exceeds 40, the accuracy of all three models decreases. Therefore, further research is needed to improve the accuracy of model predictions with larger step sizes.
Data availability
The database used in the current study are available in Supplementary Information.
References
Caratelli, A. et al. Optimization of GFRP reinforcement in precast segments for metro tunnel lining[J]. Compos. Struct. 181, 336–346. https://doi.org/10.1016/j.compstruct.2017.08.083 (2017).
Ahmed, L. & Ansell, A. Structural dynamic and stress wave models for the analysis of shotcrete on rock exposed to blasting. Eng. Struct. 35, 11–17. https://doi.org/10.1016/j.engstruct.2011.10.008 (2012).
Zhou, Y. et al. Study on the damage behavior and energy dissipation characteristics of basalt fiber concrete using SHPB device[J]. Construction and Building Materials 368, 130413. https://doi.org/10.1016/j.conbuildmat.2023.130413 (2023).
Niu, C. et al. Effect of loading rate and water on the dynamic fracture behavior of sandstone under impact loadings[J]. International Journal of Geomechanics 21(8), 04021139. https://doi.org/10.1061/(ASCE)GM.1943-5622.0002046 (2021).
Hosen, M. A. et al. Investigation of Structural Characteristics of Palm Oil Clinker Based High-Strength Lightweight Concrete Comprising Steel Fibers[J]. Journal of Materials Research and Technology https://doi.org/10.1016/j.jmrt.2021.11.105 (2021).
Yi, C., Zhang, L., Chen, Z., Xie, H., 2006. Experimental study on bi-material and bi-body models under axial compression. Rock and Soil Mechanics. 04, 571–576. https://doi.org/10.16285/j.rsm.2006.04.012.
Zhao, B. et al. Research on the influence of contact surface constraint on mechanical properties of rock-concrete composite specimens under compressive loads[J]. Frontiers of Structural and Civil Engineering 14(2), 322–330. https://doi.org/10.1007/s11709-019-0594-7 (2020).
Xiang, W., Wang, Y., Jia, H. & Guo, Y. Model test study of rock-shotcrete layer structure under freeezing-thawing cycles. Chinese Journal of Rock Mechanics and Engineering. 09, 1819–1826 (2011).
Selcuk, L. & Asma, D. Experimental investigation of the Rock-Concrete bi materials influence of inclined interface on strength and failure behavior. International Journal of Rock Mechanics and Mining Sciences. 123, 1–11. https://doi.org/10.1016/j.ijrmms.2019.104119 (2019).
Gao, H. et al. Compression failure conditions of concrete-granite combined body with different roughness interface[J]. International Journal of Mining Science and Technology 33(3), 297–307. https://doi.org/10.1016/j.ijmst.2022.12.002 (2023).
Long, X. et al. Machine learning method to predict dynamic compressive response of concrete-like material at high strain rates[J]. Defence Technology 23, 100–111. https://doi.org/10.1016/j.dt.2022.02.003 (2023).
Xu, J. et al. Dynamic mechanical behavior of granite under the effects of strain rate and temperature[J]. International Journal of Geomechanics 20(2), 04019177. https://doi.org/10.1061/(ASCE)GM.1943-5622.0001583 (2020).
Al-Salloum, Y., Almusallam, T., Ibrahim, S., Abbas, H. & Alsayed, S. Rate dependent behavior and modeling of concrete based on SHPB experiments. Cement and Concrete Composites. 55, 34–44. https://doi.org/10.1016/j.cemconcomp.2014.07.011 (2015).
Pan, L. et al. Numerical study on dynamic properties of rubberised concrete with different rubber contents[J]. Defence Technology 24, 228–240. https://doi.org/10.1016/j.dt.2022.04.007 (2023).
Li, W., Luo, Z., Long, C., Wu, C. & Duan, W. Effects of nanoparticle on the dynamic behaviors of recycled aggregate concrete under impact loading. Materials & Design. 112, 58–66. https://doi.org/10.1016/j.matdes.2016.09.045 (2016).
Li, N., Long, G., Fu, Q., Song, H. & Ma, C. Dynamic mechanical characteristics of filling layer self-compacting concrete under impact loading. Archives of Civil and Mechanical Engineering. 19, 851–861. https://doi.org/10.1016/j.acme.2019.03.007 (2019).
Xiao, J., Li, L., Shen, L. & Poon, C. S. Compressive behaviour of recycled aggregate concrete under impact loading. Cement and Concrete Research. 71, 46–55. https://doi.org/10.1016/j.cemconres.2015.01.014 (2015).
Blanton, T. L. Effect of strain rates from 10–2 to 10 sec-1 in triaxial compression tests on three rocks. International Journal of Rock Mechanics & Mining Sciences & Geomechanics Abstracts. 18, 47–62. https://doi.org/10.1016/0148-9062(81)90265-5 (1981).
Olsson, W. A. The compressive strength of tuff as a function of strain rate from 10–6 to 10–3/sec. International Journal of Rock Mechanics and Mining Sciences & Geomechanics Abstracts. 28, 115–118. https://doi.org/10.1016/0148-9062(91)93241-W (1991).
Xu, Y. et al. Experimental and numerical investigation on the dynamic failure envelope and cracking mechanism of precompressed rock under compression-shear loads[J]. International Journal of Geomechanics 21(11), 04021208. https://doi.org/10.1061/(ASCE)GM.1943-5622.0002196 (2021).
Zhang, T. et al. Effect of Grain Size on the Dynamic Flexural Tensile Strength of Granite: Insight from GBM3D-PFC Simulations[J]. International Journal of Geomechanics 23(5), 04023046. https://doi.org/10.1061/IJGNAI.GMENG-7756 (2023).
Li, H., Zhao, J., Li, J., Liu, Y. & Zhou, Q. Experimental studies on the strength of different rock types under dynamic compression. International Journal of Rock Mechanics and Mining Sciences. 41, 68–73. https://doi.org/10.1016/j.ijrmms.2004.03.021 (2004).
Guo, D., Yan, P., Fan, L., Yang, J., Xue, L., 2018., A study on the stress wave characteristics and dynamic mechanical property of the sprayed concrete-surrounding rock composite sample. Journal of Vibration and Shock. 24,85–91+136. https://doi.org/10.13465/j.cnki.jvs.2018.24.014.
Chen, M., Wang., H., Qi., M., Li, Y., Wang, S., 2020. Experimental study on dynamic compressive properties of composite layers of rock and steel fiber reinforced concrete. Chinese Journal of Rock Mechanics and Engineering. 39(06):1222–1230. https://doi.org/10.13722/j.cnki.jrme.2019.1221.
Han, Z., Li, D. & Li, X. Dynamic mechanical properties and wave propagation of composite rock-mortar specimens based on SHPB tests[J]. International Journal of Mining Science and Technology 32(4), 793–806. https://doi.org/10.1016/j.ijmst.2022.05.008 (2022).
Krounis, A., Johansson, F. & Larsson, S. Shear Strength of Partially Bonded Concrete-Rock Interfaces for Application in Dam Stability Analyses. Rock Mechanics and Rock Engineering. 49, 2711–2722. https://doi.org/10.1007/s00603-016-0962-8 (2016).
Shen, Y., Wang, Y., Yang, Y., Sun, Q. & Luo, T. Influence of surface roughness and hydrophilicity on bonding strength of concrete-rock interface. Construction and Building Materials. 213, 156–166. https://doi.org/10.1016/j.conbuildmat.2019.04.078 (2019).
Bost, M., Mouzannar, H., Rojat, F. & Rajot, J. Metric Scale Study of the Bonded Concrete-Rock Interface Shear Behaviour. KSCE journal of civil engineering. 24, 390–403. https://doi.org/10.1007/s12205-019-0824-5 (2020).
Nguyen, G. D. & Bui, H. H. A thermodynamics-and mechanism-based framework for constitutive models with evolving thickness of localisation band[J]. International Journal of Solids and Structures 187, 100–120. https://doi.org/10.1016/j.ijsolstr.2019.05.022 (2020).
Xu, H. & Wen, H. M. A computational constitutive model for concrete subjected to dynamic loadings[J]. International Journal of Impact Engineering 91, 116–125. https://doi.org/10.1016/j.ijimpeng.2016.01.003 (2016).
Zhang, Z., Chen, Y. & Huang, Z. A novel constitutive model for geomaterials in hyperplasticity[J]. Computers and Geotechnics 98, 102–113. https://doi.org/10.1016/j.compgeo.2018.01.017 (2018).
Lefik, M. & Schrefler, B. A. Artificial neural network as an incremental non-linear constitutive model for a finite element code[J]. Computer methods in applied mechanics and engineering 192(28–30), 3265–3283. https://doi.org/10.1016/S0045-7825(03)00350-5 (2003).
Jung, S. & Ghaboussi, J. Neural network constitutive model for rate-dependent materials[J]. Computers & Structures 84(15–16), 955–963. https://doi.org/10.1016/j.compstruc.2006.02.015 (2006).
Liu, X. et al. A review of artificial neural networks in the constitutive modeling of composite materials[J]. Composites Part B: Engineering 224, 109152. https://doi.org/10.1016/j.compositesb.2021.109152 (2021).
Chen, G. Recurrent neural networks (RNNs) learn the constitutive law of viscoelasticity[J]. Computational Mechanics 67(3), 1009–1019. https://doi.org/10.1007/s00466-021-01981-y (2021).
Liu, Z. et al. Hard-rock tunnel lithology prediction with TBM construction big data using a global-attention-mechanism-based LSTM network[J]. Automation in Construction 125, 103647. https://doi.org/10.1016/j.autcon.2021.103647 (2021).
Mahmoodzadeh, A. et al. Machine learning techniques to predict rock strength parameters[J]. Rock Mechanics and Rock Engineering 55(3), 1721–1741. https://doi.org/10.1007/s00603-021-02747-x (2022).
Zhai, Y., Gao, H. & Wang, T. Research on the Dynamic Response and Failure Characteristics of Concrete-Granite Specimens with Varied Interface Roughness[J]. Journal of Materials in Civil Engineering 35(2), 04022407. https://doi.org/10.1061/(ASCE)MT.1943-5533.0004554 (2023).
Flores-Johnson, E. & Li, Q. Structural effects on compressive strength enhancement of concrete-like materials in a split Hopkinson pressure bar test. International Journal of Impact Engineering. 109, 408–418. https://doi.org/10.1016/j.ijimpeng.2017.08.003 (2017).
Caliskan, S., Karihaloo, B. & Barr, B. Study of rock-mortar interfaces. Part I: surface roughness of rock aggregates and microstructural characteristics of interface. Magazine of Concrete Research. 54, 449–461. https://doi.org/10.1680/macr.2002.54.6.449 (2002).
Fan, L., Li, H. & Xi, Y. Investigation of three different cooling treatments on dynamic mechanical properties and fragmentation characteristics of granite subjected to thermal cycling[J]. Underground Space 7(5), 847–861. https://doi.org/10.1016/j.undsp.2021.12.010 (2022).
Donath, F. & Fruth, L. Dependence of strain-rate effects on deformation mechanism and rock type. The Journal of Geology. 79, 347–371. https://doi.org/10.1086/627630 (1971).
Jaiswal, A., Verma, A. K. & Singh, T. N. A novel proposed classification system for rock slope stability assessment[J]. Scientific Reports 14(1), 10992. https://doi.org/10.1038/s41598-024-58772-7 (2024).
Acknowledgements
The authors would like to acknowledge financial supports by the Open Fund of Key Laboratory of Western China’s Mineral Resources and Geological Engineering, Ministry of Education, Chang’an University (No. 300102264501-03), Department of Science and Technology of Shaanxi Province (No. 2021TD-55).
Author information
Authors and Affiliations
Contributions
G. H., Z. Y., and W.T.N. conceptualised the study and designed the protocol. G. H., Z. Y., and W.T.N. did the PROSPERO registration. G. H., Z. Y. did the literature review, collected data and assessed the quality of the studies. G. H., Z. Y. verifed the data. G. H., Z. Y., and W.T.N. analysed the data. G. H., Z. Y., and W.T.N. interpreted the results. G. H., Z. Y. wrote the initial draf of the manuscript. All the authors have reviewed, edited, and provided critical comments. All authors had full access to all the data in the study and had the fnal responsibility for the decision to submit for publication.
Corresponding author
Additional information
Publisher’s note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Supplementary Information
Rights and permissions
Open Access This article is licensed under a Creative Commons Attribution-NonCommercial-NoDerivatives 4.0 International License, which permits any non-commercial use, sharing, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons licence, and indicate if you modified the licensed material. You do not have permission under this licence to share adapted material derived from this article or parts of it. The images or other third party material in this article are included in the article’s Creative Commons licence, unless indicated otherwise in a credit line to the material. If material is not included in the article’s Creative Commons licence and your intended use is not permitted by statutory regulation or exceeds the permitted use, you will need to obtain permission directly from the copyright holder. To view a copy of this licence, visit http://creativecommons.org/licenses/by-nc-nd/4.0/.
About this article

Cite this article
Gao, H., Zhai, Y. & Wang, T. A deep LSTM-based constitutive model for describing the impact characteristics of concrete–granite composites with different roughness interfaces. Sci Rep 14, 29129 (2024). https://doi.org/10.1038/s41598-024-80366-6
Received:
Accepted:
Published:
Version of record:
DOI: https://doi.org/10.1038/s41598-024-80366-6
Keywords
This article is cited by
-
Data-Driven Modeling and Optimization of Heat Treatment Parameters for Aluminum Alloys Using Advanced Machine Learning
Journal of Materials Engineering and Performance (2025)
-
Influence of interface roughness on mechanical and deformation characteristics of rock-concrete composites
Environmental Earth Sciences (2025)
