
Abstract
Objects entering water, characterized by brief and high-peak impact forces, have been extensively investigated in scientific research. However, the specific water entry process during docking downstream of the launching ship lift chamber involves T-shaped beams entering the water at a constant velocity with a deadrise angle of zero degrees. The hydrodynamic load mechanisms during this process remain not well understood. This research investigated the hydrodynamic loads generated as T-shaped beams from ship lift chambers enter water. Physical model experiments delineated the water entry process into three distinct phases: the entry impact phase, the cavity phase, and the braking phase. Furthermore, numerical simulations, validated by physical models, were employed to explore the factors influencing impact and cavity forces during the water entry process. These findings led to the derivation of empirical formulas to calculate the impact and cavity forces. These results support the assessment of structural forces on ship lift chambers, thereby enhancing the technical support and operational efficiency of ship lifts.
Similar content being viewed by others

Introduction
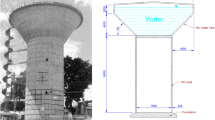
A launching-type ship lift is a type of ship lift in which the ship lift chamber is docked downstream in the water to cope with the large variation in the downstream water level. Figure 1 shows the Jinghong ship lift located in the Dai Autonomous Prefecture of Xishuangbanna, China. Its docking process involves the chamber entering the water, (a) shows that the chamber has entered the water and connected with the downstream navigation channel, while (b) provides a detailed view of the structure at the bottom of the chamber. To reduce the additional hydrodynamic load induced in the process of entering and exiting the water, the bottom plate of the chamber is usually designed as a wedge-shaped body reinforced by a large number of longitudinal and transverse beams. Therefore, the load-bearing capacity of these beams is directly related to the overall safety of the ship lift. Chittaranjan B. Nayak1,2,3 studied the load-bearing capacity and reinforcement methods of beams through impact bearing capacity physical model tests and finite element numerical simulation methods. However, the current research on the hydrodynamic load of the bottom beam of a launch ship lift cabin during the water entry process is still insufficient.
In view of this research gap, this study will focus on the hydrodynamic load of a T-shaped support beam in a launching-type ship lift during the process of entering water at a constant velocity. Water entry is a transient process characterized by a short duration, high pressure magnitude, and rapid load variation. The shape of the object significantly influences the impact during water entry. Typically, as the bottom angle increases, the impact load gradually decreases. This phenomenon occurs because as the bottom angle increases, the cross-sectional shape of the object becomes more streamlined, resembling the bow of a ship. This streamlined shape allows for a more gradual displacement of water upon impact, reducing the pressure and force exerted on the object. In ship and high-speed boat design, this principle is applied to minimize the impact loads during water entry, enhancing performance and safety. Korobkin and Pukhnachov4 categorized object shapes into three types: flat plates, blunt bodies, and pointed bodies. When flat plates enter water, the effect of air entrapment by the plate should be considered. One of the early pioneers in the theoretical study of structures entering water was Karman5. In 1929, he introduced the concept of using added mass to analyze water entry impact, calculating the impact load through the use of added mass, and derived a formula for calculating the impact load based on momentum conservation principles and geometric relationships. But it overlooks the spray root formation, which is the main contributor to hydrodynamic load. This spray root appears in non-flat structures. Subsequently, several scholars proposed different solutions to address these challenges. First, addressing significant nonlinear features has always been a major challenge in water entry impact problems. Nonlinearity in water entry problems can be broadly categorized into three aspects: nonlinearity of the wetted surface, nonlinear boundary conditions at the free surface, and nonlinearity of the Bernoulli Eq. 6. In 1932, Wagner7 formalized Karman’s method, linearizing the boundary conditions at the free surface and the Bernoulli equation while accounting for the effect of water surface elevation during impact. This led to the development of the small bottom angle approximation for flat plates, which is the basis of contemporary theoretical research. The equation introduced a water wave impact factor and, by applying the Bernoulli equation, derived the distribution of impact pressure on the wetted surface, making the theoretical analysis more consistent with practical problems and suitable for estimating actual impact pressure. However, the model do not account for water separation, and any second impact on the walls of the structure. Building upon this theoretical foundation, researchers have utilized analytical or semianalytical methods to study water entry problems. Examples include the studies conducted by Armand and Cointe8, Howison et al.9, Scolan and Korobkin10, Korobkin and Scolan11, and Moore et al.12. In addition to analytical or semianalytical methods, water entry problems have also been investigated using numerical simulation methods, with one of the most commonly employed techniques being the boundary element method (BEM). Given that the water entry process involves short durations and small affected regions, the BEM is highly suitable for solving such problems. Researchers such as Zhao and Faltinsen13, Lu et al.14, Battistin and Iafrati15, Wu et al.16,17, Xu et al.18,19, Sun and Wu20, Wu and Sun21, and Bisplinghoff22 have employed BEMs with fully nonlinear boundary conditions to study the water entry of objects with various shapes, including two-dimensional wedge shapes, cylindrical shapes, axisymmetric bodies, and three-dimensional objects.In previous research, the focus was primarily on objects with deadrise angles greater than zero degrees entering water, and the predominant entry mode was typically associated with free-fall water entry. However, in the water-entry process of launching ship lifts, T-shaped beams enter the water at a constant velocity. Consequently, the mechanisms governing this specific water entry problem are not yet fully understood, and there is a crucial need to identify and quantify these aspects.
Therefore, in this study, the water entry mechanism of the support beam of a ship lift chamber under constant velocity was studied by establishing a physical water entry model. The hydrodynamic load and flow patterns of the water were measured. Building upon the experimental findings, extensive numerical simulations were performed to quantitatively assess the impact of pertinent parameters on the characteristic load experienced by the beam during the constant-velocity water entry process. The outcomes of this investigation have the potential to offer valuable insights into enhancing the design and operational practices of ship lifts.

Launching ship lift at the Jinghong dam: (a) The ship lift docks downstream. (b) Bottom beam structure of the Jinghong ship lift.
Physical model
Experimental setup and experiments
The research in this paper focuses on the water entry process of the inverted T-shaped beam at the bottom of the ship lift chamber. Due to its remarkable length-to-width ratio exceeding 10, the water entry behavior of the beam can be reasonably simplified as a two-dimensional problem for analysis, a simplification method that has been validated in previous studies23. Through this simplification, we are able to gain a deeper insight into the dynamic performance of the inverted T-shaped beam in an aquatic environment and its interaction with water. The beam was modeled with reference to the lift of the Jinghong ship. The model was constructed with polyvinyl chloride (PVC), which has a density of 1400 kg/m³ and an elastic modulus of 3 GPa. It consisted of a 0.01 m thick web and flange.The model had dimensions of 0.9 m long, 0.4 m wide, and 0.5 m high. A water tank was used to provide an initially still water region with a depth of 0.5 m. The tank had measurements of 1 m in length and width, with a total depth of 0.7 m. It was made of plexiglass to allow for visual observation of the water-entry process. A hydraulic hoist fixed to a steel structure was employed to raise and lower the beam model. During the water-entry process, a guide rail was used to keep the flange parallel to the still water surface. Figure 2a and b show a schematic diagram and a photograph of the experimental setup, respectively. Five pressure sensors were used to measure the hydrodynamic pressure below the flange with an accuracy of 10 Pa. The sensors had round heads with a diameter of 5 mm. They were arranged in the configuration shown in Fig. 2c with a spacing of 40 mm. The first sensor, P1, was located 22 mm from the center of the web, and an ultrasonic displacement sensor fixed to the steel structure was used to record the vertical displacement of the flange. Ultrasonic displacement sensors can measure movements in the range of 0 to 1 m with an accuracy of ± 0.1%. The Donghua acquisition system collected data from pressure and ultrasonic displacement sensors at a sampling frequency of 500 Hz. Water intrusion was recorded using a 1 MP high-speed camera operating at 100 fps. Initially, the flange was positioned 0.16 m above the calm water surface.

Model setup: (a) Model device diagram; (b) Model photo; (c) Pressure sensor arrangement.
Basic features
Pressure evolution during water entry
The velocity (v) and displacement (S) of the beam during the water-entry process are shown in Fig. 3. The displacement was obtained through direct measurement of the model, and the velocity was subsequently determined as the derivative of S with respect to time, especially, entry velocity v0 = 0.061, the width of flange b = 0.4. The beam began to move at tv0/b = 0.168 and accelerated at a constant rate of a/g = 0.012, reaching v/v0 = 1, after which it maintained a relatively constant velocity. At tv0/b = 0.582, the flange just contacted the water surface. Upon entering the water, the impact force and water surface fluctuations occur, resulting in fluctuations in the entry speed. At tv0/b = 0.991, the flange decelerated at a rate of a/g = 0.012, eventually reaching a complete stop.

Displacement and velocity of the beam.
Figure 4 illustrates the chronological development of the dynamic pressure beneath the beam during the water-entry sequence. At precisely tv0/b = 0.582, the lower flange gently contacted the water surface. The interaction between the flange and the water resulted in a sudden increase in pressure at the flange’s bottom, with a maximum pressure increase of p/(0.5ρv02) = 429.992. The duration of this pressure event spanned tv0/b = 0.004. Subsequently, at tv0/b = 0.991, the flange initiated its deceleration, experiencing a deceleration of a/g = 0.012. Due to the influence of both the inertia of the water flow and the stiffness of the model, the flange pressure fluctuated during the deceleration phase, with the amplitude of these fluctuations peaking at 537.490 Pa.

Evolution of the dynamic pressure beneath the beam.
Flow pattern evolution during water entry
Various patterns were observed during the water-entry process of the beam. In this section, we have organized the water-entry process into three primary stages, leveraging pressure measurements and visual observations.
The initial phase, depicted in Fig. 5, corresponds to the impact stage. In this stage, visual inspection of the image reveals that as the water-entry process progresses, the side edge of the flange makes initial contact with the water surface. This contact effectively seals off the gas exhaust route within the central section of the flange, resulting in the entrapment of gas beneath the flange. The trapped gas assumes a flat-tened shape in response to these conditions.

Flow pattern of the impact stage: (a1) Front view; (a2) 45° bottom view.
The subsequent phase, referred to as the cavity stage, introduces an additional hydrodynamic load on the beam due to the cavity. During this stage, the flange descends, expelling the water body underneath it to both sides. Simultaneously, the discharged water carried away the water above the flange, resulting in a reduction in the water surface level surrounding the flange, as depicted in Fig. 6a1 and a2. As the water on both sides could not return promptly, the upper surface of the flange became lower than the surrounding water levels, leading to the formation of a void or cavity as the flange entered the water, as illustrated in Fig. 6b1 and b2. The presence of this cavity exerted water pressure on the underside of the flange, which was approximately calculated based on the average liquid level, while the top surface of the flange remained unpressurized. This condition gave rise to a peak value in the total load, constituting a secondary impact during the water entry process.
As the flange continued to descend, the cavity formed by the flange gradually disappeared as it was replenished with water. This replenishment water also affected the web, as indicated in Fig. 6c1 and c2. With further submersion of the flange, the water surface approached equilibrium, and the cavity stage concluded, as illustrated in Fig. 6d1 and d2.

Flow pattern of the cavity stage.
The third phase was identified as the braking stage, marking the period when the flange decelerated and eventually halted. In this stage, the hydrodynamic load acting on the flange primarily consisted of the inertia generated by the flowing water. While the flange underwent deceleration and cessation, the water flow retained its initial velocity, resulting in a distinct impact load on the flange’s stopping motion. This impact load is denoted as the braking force and is a significant factor during this phase, as illustrated in Fig. 7.

Flow pattern of the braking stage.
Numerical simulation
Computational domain and boundary conditions
A numerical simulation of the water-entry process was conducted, replicating the conditions of the physical experiment. A two-dimensional numerical model was constructed in the vertical plane, mirroring the layout and dimensions of the physical model. The computational region was defined by the beam, tank sidewalls, tank bottom, and upper boundary. Wall boundary conditions were applied to the beam, tank sidewalls, and tank bottom, while a pressure outlet condition was imposed on the upper boundary.
The computational domain has a length of x/b = 5 and a height of y/b = 3.75. The water depth is y/b = 1.75, and the air domain above it occupies a height of y/b = 2. A structured grid is employed for discretization to ensure both computational accuracy and efficiency. The total number of grid cells in this setup is approximately 300,000, providing a balance between computational precision and practicality. In the x-direction, the grid is refined near critical regions with a grid size of Δx_fine/b = 7.5e-3, while in the majority of the domain, a coarser grid size of Δx_coarse/b = 1.25e-2 is used to maintain computational efficiency. In the y-direction, the grid refinement strategy varies depending on the fluid domain. For the air domain in the y-direction, Δy_fine/b = 1.25e-3 near high-gradient areas, transitioning to Δy_coarse/b = 1.25e-2. In the water domain, Δy_fine/b = 1.25e-3 is maintained near critical features, gradually changing to Δy_coarse/b = 5e-3. Additionally, to verify grid independence, multiple simulations with varying grid densities were conducted. It was found that when the grid size was less than a certain threshold of Δy_fine/b = 1.25e-3 in the most critical regions, the variations in simulation results were within a preset tolerance of 1%. The configuration of the computational domain and simulation grid is illustrated in Fig. 8a1 and a2.
In the simulation, the dynamic mesh method was employed to replicate the relative motion between the beam and the tank, while the layering method was utilized for mesh updating. To mimic the flange’s movement, the lower section of the tank was designated as the moving zone, descending at a velocity equivalent to the physical beam’s speed. The tank sidewalls were designated deformation zones, where mesh splitting and deformation processes occurred.
The fluid comprises both water and air, with water being treated as incompressible and air being considered compressible. The fluid dynamics were described using the compressible two-phase form of the Reynolds-averaged Navier–Stokes equations, with turbulence effects accounted for via the renormalization group k–ε turbulence model. The RANS equations, in their differential form, consist of the mass conservation equation Eq. (1), the momentum conservation equations Eq. (2 ~ 3), and the energy conservation equation Eq. (4).
where\(\nabla =\frac{\partial }{{\partial x}}\overset{\lower0.5em\hbox{$\smash{\scriptscriptstyle\rightharpoonup}$}} {i} +\frac{\partial }{{\partial y}}\overset{\lower0.5em\hbox{$\smash{\scriptscriptstyle\rightharpoonup}$}} {j} \),\( \overset{\lower0.5em\hbox{$\smash{\scriptscriptstyle\rightharpoonup}$}}{V} = u\overset{\lower0.5em\hbox{$\smash{\scriptscriptstyle\rightharpoonup}$}} {i} +v\overset{\lower0.5em\hbox{$\smash{\scriptscriptstyle\rightharpoonup}$}} {j}\),\( \overset{\lower0.5em\hbox{$\smash{\scriptscriptstyle\rightharpoonup}$}}{f} = f_{x} \overset{\lower0.5em\hbox{$\smash{\scriptscriptstyle\rightharpoonup}$}} {i} +f_{y}\overset{\lower0.5em\hbox{$\smash{\scriptscriptstyle\rightharpoonup}$}} {j}\).
The volume of the fluid model was employed to accurately track the interface between water and air, taking into account a density of 998.2 kg/m3 for water and using the ideal gas state equation Eq. (5) to determine the density of air.
For the numerical solution, an explicit time discretization scheme was applied, while spatial discretization employed the second-order upwind scheme. Additionally, the velocity and pressure fields were coupled using the SIMPLE algorithm24.
The time step utilized for our simulations has been carefully chosen with a minimum value of 1e-6 to ensure accuracy and stability of the numerical solutions. Furthermore, to maintain the computational integrity and avoid potential issues associated with unphysical phenomena, we have controlled the courant number strictly within a limit of 2. This approach ensures that the propagation of information through the domain remains physically meaningful and aligned with the characteristics of the fluid flow being simulated.

Computational domain and simulation mesh. (a1) Computational domain; (a2) Simulation mesh.
Validation and verification
Air velocity verification before entry
Throughout the water entry process, we monitored the x-direction flow velocity at positions x1/b = 0.25 and x2/b = 0.5 along the underside of the flange’s leading edge. Prior to the flange’s lower surface making contact with the water, a phenomenon occurs where as the gap between the flange and the water surface diminishes, the air beneath the flange’s underside is expelled horizontally. Assuming a uniform distribution of the air discharge velocity beneath the flange along the y-axis direction and maintaining a stable water surface, we can derive the formula for calculating the air discharge velocity at x1/b and x2/b through a straightforward analysis (Eq. 6).
In the equation, v(i, t) represents the flow velocity at point i at time t, and xi denotes the horizontal distance from the point to the center of the flange. v0 represents the water entry velocity, and h(t) represents the distance between the liquid surface and the bottom of the flange at time t.
Figure 9 presents a comparison between the numerical simulation results for flow velocities at x1/b and x2/b and the theoretical solution. It is evident from the figures that for tv0/b < 0.575, the numerical solution aligns with the results of the numerical simulation, affirming the accuracy of the numerical model for the wind field. However, for tv0/b > 0.575, the theoretical solution shows a gradual increase, while the numerical solution gradually diminishes and converges toward 0. The discrepancy between the theoretical solution and the numerical model can be attributed to the theoretical assumption that the water surface remains at that level. However, as the gap between the flange and the water surface diminishes, the wind speed at the water surface gradually increases, causing the water surface to become progressively unstable, resulting in the formation of ripples that impede the flow of gases, as depicted in Fig. 10. At tv0/b = 0.564, the wind speed at x1/b is 0.429, and at x2/b, it reaches 0.969, with the liquid surface remaining relatively calm. At tv0/b = 0.576 the wind speed at x1/b surges to 1.53, and at x2/b, it increases to 3.1. This leads to the gradual elevation of the water surface along the flange’s central axis to both sides. This phenomenon occurs due to the gradual increase in wind speed from the center toward the periphery, causing a corresponding reduction in pressure at the flange’s lower surface from the center to the edges, resulting in a deformation of the liquid surface. At tv0/b = 0.583, the wind speed at x1/b is 0.661, while at x2/b, it is 0.954. At this point, the flange descends below the average water surface level, and the lower surface gas directly interacts with the water surface from the sides, inducing ripples on the liquid surface. At tv0/b = 0.598, the air beneath the flange’s lower surface becomes trapped, forming an air pocket.

Air discharge velocity at x1/b and x2/b.

Impact stage gas trapping process at the bottom of the flange. (a) tv0/b = 0.564; (b) tv0/b = 0.576 ; (c) tv0/b = 0.583; (d) tv0/b = 0.598.
Water entry process pressure verification
The measured bottom pressure during the water entry process and the corresponding pressure at the numerical simulation points are shown in Fig. 11. The graph shows that the numerical simulation pressure trend closely matches that of the physical model. However, there are certain differences in the peak impact force and pressure during the deceleration process. The primary reason for this disparity is that the physical model exhibits a shorter duration but a greater peak during the impact process. Additionally, due to limitations in the stiffness of the supporting structure and hydraulic cylinders in the physical model, energy absorption occurs during impact, resulting from structural deformation and other factors. Therefore, the impact load in the mathematical model is greater than the impact load in the physical model.

Comparison of physical (wp) and numerical (sp) pressures during water entry.
To validate the accuracy of the peak impact force calculations in our model, the same simulation method was applied to numerically simulate the physical measurement of impact pressure during the free-fall water entry process of a flat plate, as reported in reference25. In the referenced literature, a physical model consisting of a flat plate with a length of b = 0.2 m and a weight ranging from 15.3 to 15.8 kg was released in free fall from a height of h/b = 2 above the water surface into a rectangular water tank with a depth of h/b = 3.
A two-dimensional numerical model was constructed in the vertical plane to reflect the layout and dimensions of the physical model. The calculation area is defined by the flat plate, tank sidewalls, tank bottom and tank upper boundary. Wall boundary conditions are applied to the plate, tank sidewalls and tank bottom, while pressure outlet conditions are applied to the upper boundary. To discretize the computational domain, a structured grid is used in the flat plate area with a grid size of △x/b = 2.5e-3. During the simulation process, the overset grid was used for dynamic grid calculations. The fluids involved in the calculations include water and air, where water is considered incompressible and air is considered compressible. The fluid dynamics are described by the compressible two-phase form of the Reynolds-averaged Navier–Stokes equations, and the turbulence effects are explained by the renormalization group k–ε turbulence model. Considering that the density of water is 998.2 kg/m3, a fluid volume model was used to accurately track the water‒air interface, and the ideal gas equation of state was used to determine the density of air.
Pressure measurement points were arranged at the bottom of the model’s longitudinal cross section. The calculated impact pressure comparison is illustrated in Fig. 12, where sp represents the numerical simulation results and wp represents the physical measurement results from the referenced literature. The peak impact pressure error is within 10%. Therefore, it can be concluded that utilizing the CFD method for simulating the load during an object’s water entry process is feasible.

Comparison of physical (wp) and numerical (sp) pressures during water entry.
Simulation conditions
The hydrodynamic force experienced by the beam during its water-entry process depended on two key parameters: the flange width (b) and the entry velocity (v). Initially, the water tank had a still water depth of h/b = 1.75, corresponding to a water level of y/b = -0.75, while the bottom of the flange was situated at y/b = 0. The flange traveled d/b = 1.25 at a constant velocity, with a deceleration rate of a/g = 0.01. In total, 25 simulations were conducted, encompassing five different flange widths (0.2, 0.4, 0.6, 0.8, and 1.0 m) and five distinct exit velocities ranging from 0.017 to 0.2 m/s.
Data analysis
Total hydrodynamic load
The variation in the total hydrodynamic load throughout the water-entry process is illustrated in Fig. 13 for gb/v2 = 3394.464. In accordance with the flow patterns observed during the flange water-entry process, the hydrodynamic loads were categorized into three primary stages. During the first stage, the hydrodynamic load experienced a sudden increase followed by a rapid decrease within an extremely short time, forming a pulse peak. This load was denoted as the impact force, which was generated when the flange collided head-on with the water surface during the impact phase. The peak impact was Ft/(0.5ρv2bL) = 1124.5 in the second stage, and the hydrodynamic load gradually increased, resulting in the formation of a second peak, with a peak load Ft/(0.5ρv2bL) = 605.5. The third stage corresponded to the deceleration phase. As the flange decelerated to a halt, the water flow retained its original velocity. The upper water flow exerted a downward thrust on the flange, while the lower water flow adhered to the flange, leading to a sudden reduction in the overall hydrodynamic load, with an amplitude decrease of approximately Ft/(0.5ρv2bL) = 129.7.

Total hydrodynamic load evolution during the water-entry process.
Virtual buoyancy
In this study, virtual buoyancy was defined as the buoyancy exerted on the beam, assuming that the water in the tank was quiet at a given time during the entire water-entry process. Figure 14 shows the virtual buoyancy variation corresponding to a test with gb/v2 = 3394.464. The virtual buoyancy force consisted of three straight lines with different slopes, which corresponded to the flange entering the water, the web entering the water, and remaining stationary in the water after entering the water.

Virtual buoyancy evolution during the water entry process.
Additional hydrodynamic loads
The additional hydrodynamic load is defined as the disparity between the total hydrodynamic load and the virtual buoyancy. Figure 15 provides an illustration of the additional hydrodynamic load throughout the water-entry process. During the impact stage, the additional hydrodynamic load achieved its initial maximum value of 1124.5, designated the impact load. In the subsequent cavity stage, the additional hydrodynamic load peaked again at 423.9, termed the cavity load. Finally, in the braking stage, the additional hydrodynamic load decreased to a minimum of -86.5, which is designated the braking load. Both the impact load and cavity load held significant importance in the context of facility protection.

Additional hydrodynamic load evolution during the water-entry process.
Prediction of impact loads
In the study of impact forces, Vanden26 noted that the viscosity and gravity of the fluid may have important effects near the contact point. Korobkin & Pukhnachov27 used the perturbation method to also illustrate that the influence of viscosity should be properly considered at the contact point. This study combines previous research and suggests that the impact force Fi/L per unit length of the flange entering the water mainly depends on the following variables:
where ρ is the water density, g is the acceleration due to gravity, and µ is the dynamic viscosity of the water. Dimensional analysis leads to the following mathematical expression:
Multiple regression for the normalized impact load, Fi/(1/2ρv2bL), yields:
With a correlation coefficient of r2 = 0.94. A comparison of the Fi/(1/2ρv2bL) values predicted using Eq. (4) and the calculated values is illustrated in Fig. 16. The results were in close agreement with the line of perfect agreement, and the maximum relative deviation from the calculated values was approximately 10%.

Calculated versus predicted normalized impact loads.
Prediction of the cavity loads
Hydraulic considerations have demonstrated that the cavity load per unit length, Fc/L, depends mainly on the following variables26:
Dimensional analysis leads to the following mathematical expression:
Multiple regression for the normalized cavity load, Fc/(1/2ρv2bL), yields:
with a correlation coefficient of r2 = 0.99. A comparison of the Fc/(1/2ρv2bL) values predicted using Eq. (7) and the calculated values is illustrated in Fig. 17. The results were in close agreement with the line of perfect agreement, and the maximum relative deviation from the calculated values was approximately 10%.

Calculated versus predicted normalized cavity loads.
Conclusions
In the case of ship lifts, the hydrodynamic forces induced during water entry through the chamber beam may result in unsafe and unstable operating conditions. This research endeavours to address this issue by constructing a physical model of a simplified beam to investigate the fundamental flow patterns occurring during the water-entry process. Following the experimentation phase, numerical modeling was conducted to analyze the governing factors of the water-entry process. The key findings of this study can be summarized as follows:
-
(1)
The water-entry process can be divided into three primary phases: the impact phase, cavity phase, and braking phase. The maximum additional hydrodynamic load occurred during the impact phase and cavity phase, necessitating consideration during the design and operation of ship lifts.
-
(2)
Based on dimensional analysis and the results of numerical simulation, an empirical equation was derived to express the normalized maximum impact load and cavity load in terms of two dimensionless parameters. This enables a direct evaluation of the expected maximum load during the water-entry process.
These findings have the potential to aid in evaluating the adverse effects of forces on ship lift chambers and enhancing the technical support for ship lift operations. Considering the beam as a rigid body in this paper, the obtained results do not fully capture the fluid–structure coupling characteristics during the process of beam entry into water. The next step in the research plan is to consider the beam as an elastic body for a bidirectional fluid–structure coupling study.
Data availability
The data used to support the findings of this study are available from the corresponding author upon request.
References
Nayak, C. B. Experimental and numerical study on reinforced concrete deep beam in shear with crimped steel fiber[J]. Innovative Infrastructure Solutions. 7 (1), 41. https://doi.org/10.1007/s41062-021-00638-2 (2022).
Nayak, C. B. Experimental and numerical investigation on compressive and flexural behavior of structural steel tubular beams strengthened with AFRP composites[J]. J. King Saud University-Engineering Sci. 33 (2), 88–94. https://doi.org/10.1016/j.jksues.2020.02.001 (2021).
Nayak, C. B., Narule, G. N. & Surwase, H. R. Structural and cracking behavior of RC T-beams strengthened with BFRP sheets by experimental and analytical investigation[J]. J. King Saud University-Engineering Sci. 34 (6), 398–405. https://doi.org/10.1016/j.jksues.2021.01.001 (2022).
Korobkin, A. A. & Pukhnachov, V. V. .Initial stage of water impact [J]. Annual Rev. Fluid Mech. 20, 159–185 (1988).
Von Karman, T. The Impact on Seaplane Floats During Landing[R]. Technical Report Archive & Image Library, (1929).
Korobkin, A. Analytical models of water impact[J]. Eur. J. Appl. Math. 15 (6), 821–838 (2004).
Wagner, V. H. Phenomena associated with impacts and sliding on liquid surfaces[J]. Z. Angew Math. Mech. 12 (4), 193–215 (1932).
Cointe, R. & Armand, J. L. Hydrodynamic impact analysis of a Cylinder[J]. J. Offshore Mech. Arct. Eng. 109 (3), 237 (1987).
Howison, S. D., Ockendon, J. R. & Wilson, S. K. Incompressible water-entry problems at small deadrise angles[J]. J. Fluid Mech. 222 (-1), 215 (1991).
Scolan, Y. M. & Korobkin, A. A. Three-dimensional theory of water impact. Part 1. Inverse Wagner problem[J]. J. Fluid Mech. 440 (440), 293–326 (2001).
Korobkin, A. A. & Scolan, Y. M. Three-dimensional theory of water impact. Part 2. Linearized Wagner problem[J]. J. Fluid Mech. 549 (-1), 343–373 (2006).
Moore, M. R. et al. Three-dimensional oblique water-entry problems at small deadrise angles[J]. J. Fluid Mech. 711, 259–280 (2012).
Zhao, R. & Faltinsen, O. Water entry of two-dimensional bodies[J]. J. Fluid Mech. 246 (-1), 593 (1993).
Lu, C. H., He, Y. S. & Wu, G. X. Coupled analysis of nonlinear interaction between fluid and structure during impact [J]. Fluids Struct. 14 (1), 127–146 (2000).
Battistin, D. & Iafrati, A. Hydrodynamic loads during water entry of two-dimensional and axisymmetric bodies[J]. J. Fluids Struct. 17 (5), 643–664 (2003).
Wu, G. X., Sun, H. & He, Y. S. Numerical simulation and experimental study of water entry of a wedge in free fall motion[J]. J. Fluids Struct. 19 (3), 277–289 (2004).
Wu, G. X. Two-dimensional liquid column and liquid droplet impact on a solid wedge[J]. Q. J. Mech. Appl. Math. 60 (4), 497–511 (2007).
Xu, G. D., Duan, W. Y. & Wu, G. X. Numerical simulation of oblique water entry of an asymmetrical wedge[J]. Ocean Eng. 35 (16), 1597–1603 (2008).
Xu, G. D., Duan, W. Y. & Wu, G. X. Numerical Simulation of Water Entry of a cone in free-fall Motion[J]. Q. J. Mech. Appl. Math. 64 (3), 265–285 (2011).
Sun, S. L. & Wu, G. X. Oblique water entry of a cone by a fully three-dimensional nonlinear method[J]. J. Fluids Struct. 42, 313–332 (2013).
Wu, G. X. & Sun, S. L. Similarity solution for oblique water entry of an expanding paraboloid[J]. J. Fluid Mech. 745, 398–408 (2014).
Bisplinghoff, R. L. & Doherty, C. S. Some studies of the impact of vee wedges on a water surface[J]. J. Franklin Inst. 253 (6), 547–561 (1952).
Li, X. & Zheng, F. Experimental and Numerical Investigation of the Water-Exit Behavior of an Inverted T-Shaped Beam [J]. Advances in Civil Engineering 2022, 1–9, (2022). https://doi.org/10.1155/2022/7174154
Okada, S. & Sumi, Y. On the water impact and elastic response of a flat plate at small impact angles[J]. J. Mar. Sci. Technol. 5, 31–39. https://doi.org/10.1007/s007730070019 (2000).
Vanden-Broeck, J. M. & Keller, J. B. Surfing on solitary waves[J]. J. Fluid Mech. 198 (198), 115–125 (1989).
Korobkin, A. A. & Pukhnachov, V. V. Initial asymptotics in contact hydrodynamics problems[C]. In: International Conference on Numerical Ship Hydrodynamics. (1985).
Chanson, H. The Hydraulics of Open Channel Flows (An Introduction; Butterworth-Heinemann, 2004).
Acknowledgements
This study was supported by the National Key R&D Program of China(No:2023YFC3206102), China Postdoctoral Fund (Grant No. 2021M700620), Yunnan Fundamental Research Projects (grant NO. 202401CF070042), Power China Science and Technology Project (grant NO. DJ-ZDXM-2022-28). The administrative support of Yaan Hu should be acknowledged.
Author information
Authors and Affiliations
Contributions
Xueyi Li, Experiment, Investigation, Writing-Original draft preparation; Feidong Zheng, Investigation, Data curation.
Corresponding author
Ethics declarations
Competing interests
The authors declare no competing interests.
Additional information
Publisher’s note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
Open Access This article is licensed under a Creative Commons Attribution-NonCommercial-NoDerivatives 4.0 International License, which permits any non-commercial use, sharing, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons licence, and indicate if you modified the licensed material. You do not have permission under this licence to share adapted material derived from this article or parts of it. The images or other third party material in this article are included in the article’s Creative Commons licence, unless indicated otherwise in a credit line to the material. If material is not included in the article’s Creative Commons licence and your intended use is not permitted by statutory regulation or exceeds the permitted use, you will need to obtain permission directly from the copyright holder. To view a copy of this licence, visit http://creativecommons.org/licenses/by-nc-nd/4.0/.
About this article

Cite this article
Li, X., Zheng, F. Experimental and numerical investigation of the water-entry behavior of an inverted T-shaped beam. Sci Rep 14, 29367 (2024). https://doi.org/10.1038/s41598-024-80762-y
Received:
Accepted:
Published:
Version of record:
DOI: https://doi.org/10.1038/s41598-024-80762-y
