
Abstract
Every node in a network is said to be resolved if it can be uniquely identified by a vector of distances to a specific set of nodes. The metric dimension is equivalent to the least possible cardinal number of a resolving set. Conditional resolving sets are obtained by imposing various constraints on resolving set. It is a fundamental parameter that provides insights into the structural properties and navigability of graphs, with diverse applications across different fields. This article focuses on identifying the metric dimension for a new network, star fan graph.
Similar content being viewed by others


Introduction and mathematical preliminaries
Computer networking plays a crucial role in enabling communication, information sharing, and access to resources across diverse devices and platforms. It forms the backbone of the internet, telecommunications, and numerous other applications in network sciences. Computer networking is the process of establishing connections between several computers and other devices so that they may interact, share resources, and exchange data. Various network topologies utilised in computer networking are referred to by the words path, star, and ring topologies. In path topology (\(P_n\)), the data transmission travels from one device to another in a single direction which is suitable for small networks where devices are arranged in a linear fashion, such as connecting a series of sensors or devices in a straight line. Although it is simple to use and appropriate for small networks, it is susceptible to interruptions in the event that one of the devices in the path fails. Every device in a ring topology (\(C_n\)) forms a circular pathway with exactly two additional devices attached to it which can be resilient to node failure. If one device fails, data can still flow in the opposite direction around the ring to reach its destination. Because data must flow through every device in the ring, even with uniform data transmission and no central point of failure, this structure could be less efficient than others. A hub or switch in the middle is directly connected to every device in a star architecture (\(K_{1,n-1}\)). Every component of data that is transmitted is filtered through the central hub and sent to the relevant device. Hybrid topologies combining elements of these basic topologies are often used to achieve specific network requirements, balancing performance, fault tolerance, and cost-effectiveness. One such network is discussed in Sect. Star fan graph and its basis.

(a) Star graph \(K_{1,10}\); (b) Wheel graph \(W_{10}\); (c) Fan graph \(F_{5}\).
Let \(G = (V, E)\) be an undirected, simple, finite, and connected graph in which the set of vertices is given by V and the set of edges by E. The distance d(u, v) between two vertices \(u, v \in V(G)\) is the number of edges in a \(u- v\) geodesic (shortest path). The diameter of a graph is the maximum distance among all pairs of vertices in the graph. It is the longest of all the shortest path lengths between any two vertices in the graph. A star is a graph with one vertex of degree \(n-1\) and \(n-1\) vertices of degree one, denoted by \(K_{1,n-1}\). A wheel graph is the one obtained by joining the leafs of a star to form cycle (ring \(C_n\)) and it is denoted by \(W_{n}\) (or \(W_{1,n-1}\)). In a similar way, a fan graph is obtained from star by joining the pendant vertices to form a path \(P_n\) which is denoted by \(F_n\). Few particular case of these graphs are depicted in Fig. 1a–c.

A graph and its different subgraphs: (a) Graph; (b) Subgraph; (c) Induced subgraph; (d) Isometric subgraph.
A graph H with a vertex set V(H) and edge set E(H), where \(V(H) \subseteq V(G)\) and \(E(H) \subseteq E(G)\), is called a subgraph of G. A subgraph H of a graph G is called an induced subgraph if E(H) consists of all edges in G whose endpoints are both in V(H). H is an isometric subgraph if the distance between any two vertices in H is the same as the distance between those vertices in G. The graph, subgraph, induced subgraph, and isometric subgraph are respectively depicted in Fig. 2a–d. The symbol \([\![ r, s]\!]\) will be utilised to signify the set, \(\{r, r+1, \ldots , s\}\).
The code of \(v \in G\) with respect to \({\mathscr {R}}= \{r_{1},r_{2},\ldots ,r_{l}\}\) is given as l-vector
If distinct vertices in G possess unique codes relative to \({\mathscr {R}}\), then set \({\mathscr {R}}\) is considered as a resolving set for G. The smallest cardinality among all sets that can resolve every vertex in G is represented by the resolving number or dimension which is symbolised as \(\dim (G)\). This notion is essential for understanding the connectivity and structure of graphs.

(a) Resolving set \({\mathscr {R}}_1=\{v_3,v_4,v_5\}\); (b) Basis \({\mathscr {R}}_2=\{v_1,v_2\}\); (c) Basis \({\mathscr {R}}_3=\{v_1,v_3\}\).
In Fig. 3(a), consider the set \({\mathscr {R}}_1=\{v_3,v_4,v_5 \}\), which is a resolving set. The representations of vertices with respect to \({\mathscr {R}}_1\) are as follows: \({\mathscr {C}}_{{\mathscr {R}}_1}(v_1)=(1,1,3), {\mathscr {C}}_{{\mathscr {R}}_1}(v_2)=(2,1,3), {\mathscr {C}}_{{\mathscr {R}}_1}(v_6)=(1,1,1)\). These representations are distinct, confirming that \({\mathscr {R}}_1\) is indeed a resolving set. In Fig. 3b, another resolving set, \({\mathscr {R}}_2=\{v_1,v_2 \}\), has a smaller cardinality. The vertex representations with respect to \({\mathscr {R}}_2\) are: \({\mathscr {C}}_{{\mathscr {R}}_2}(v_3)=(1,2), {\mathscr {C}}_{{\mathscr {R}}_2}(v_4)=(1,1), {\mathscr {C}}_{{\mathscr {R}}_2}(v_5)=(3,3), {\mathscr {C}}_{{\mathscr {R}}_2}(v_6)=(2,2)\). These representations are also distinct, showing that \({\mathscr {R}}_2\) is a resolving set with fewer vertices. By the result stated in1, \(\dim (G)=1\) if and only if G is a path. Since the graph in consideration is not a path, the resolving set with cardinality 2, \({\mathscr {R}}_2\), is optimal. This optimal resolving set is referred to as a basis of the graph. It is important to note that the basis of a graph is not necessarily unique. This is evident from Fig. 3c, where \({\mathscr {R}}_3=\{v_1,v_3 \}\) forms another basis.
The problem arises in number of domains, including robotic navigation1, image processing and pattern recognition2, coin weighing issues3, mastermind strategic games4, connected joins in graphs5, and chemistry6. Determining the metric dimension of a graph is NP-hard1. Various algorithms and heuristics have been developed to approximate the metric dimension efficiently.
The concept of metric dimension in graphs, initially introduced by Slater7 and also referred to as locating sets, was subsequently expanded upon by Melter and Harary8. Later, Chartrand et al.9 and Johnson6 rediscovered and extended these ideas, primarily to address the challenge of managing large chemical graph datasets, providing an overview of results in the field of metric dimensions. Despite significant progress, determining the metric dimension for certain graph classes remains computationally complex. For instance, Manuel et al.10 demonstrated that the problem is NP-complete for bipartite graphs. Similarly, Rajan et al.11 established that the metric dimension problem is NP-complete for directed graphs.
A variety of graph structures have been explored within the context of metric dimension. These include trees1, circulant graphs12,13, Petersen graph14, honeycomb networks15, Beneš networks10, generalized fat trees16, Illiac networks17, multi-dimensional grids1, hypercubes18, and enhanced hypercubes19. This study has also been extended to several additional graph classes, such as Kneser and Johnson graphs20, Cartesian product graphs21, Grassmann graphs22, incidence graphs23, Cayley graphs24, permutation graphs25, bilinear graphs26, wheel-related graphs27, probabilistic neural networks28, fractal cubic networks29, and irregular convex triangular networks30.
Prabhu et al.31 reinvestigated a variant of metric dimension for specific network types, including butterfly networks, silicate networks, and Beneš networks. Furthermore, numerous authors have introduced and studied variants of metric generators. These include independent resolving set32, fault-tolerant edge metric dimension33, local metric set34, connected resolving set35, edge metric dimension36, resolving partition37, and resolving dominating set38.
This collection of research underscores the growing interest in both fundamental and applied aspects of metric dimension theory, as well as its implications across diverse mathematical and practical domains.
Star fan graph and its basis
Star graphs are commonly used as interconnection networks in parallel and distributed computing systems. The simplicity and regular structure of star graphs make them suitable for connecting processors or nodes in a network, facilitating efficient communication and data transfer. The central node in the star graph can act as a central hub for communication, simplifying routing and reducing communication delays. In wireless sensor networks, star topologies can be employed for data aggregation. Each sensor node communicates directly with a central processing node, simplifying data collection and reducing the need for complex routing algorithms. The central node can coordinate and manage the activities of other nodes in the network, leading to a simplified and centralized control structure. Fan graphs can be applied in social network analysis to represent influence or information flow from a central individual or group to multiple connected nodes in a social network. Fan graphs can be considered in the design of data center topologies, where a central server or data storage unit is connected to multiple processing nodes. In collaborative systems, this could facilitate efficient information flow and collaboration. They are well-suited for broadcast scenarios where the hub node needs to link simultaneously with multiple peripheral nodes.

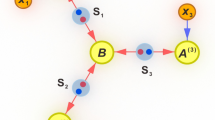
Graphical illustration of application of star fan graph.
The star fan graph was first introduced by Bustan39 in 2018. This article’s primary goal is to identify and examine a star fan graph’s metric dimension. By exploring and determining the dimension, the article aims to contribute valuable insights into the network properties and efficiency of star fan graphs, shedding light on their practical implications and potential optimizations in real-world scenarios. Also, it plays a role in designing secure communication and surveillance systems, ensuring precise location identification for enhanced security. A star fan graph could be interpreted as a graph that has both a central hub connected to all other nodes and additional nodes connected in a fan-like manner. Application of star fan graph is shown in Fig. 4.

Star fan graph of Type I and Type II (a) \(S_{v_i}(F_6, 6)\); (b) \(S_{v_{i,1}}(F_6, 6)\).
Let \(F_n\) be a fan having \(n+1\) vertices and \(S_m\) is isomorphic to \(K_{1,m}\), where m, \(n\ge 3\). A star fan graph Type I is formed by attaching a fan graph \(F_n\) to each pendant vertex of a star graph \(S_m\), symbolised as \(S_{v_i}(F_n, m)\), with \(V(S_{v_{i}}(F_n, m)) = \{v_{i}: i \in [\![1,m]\!] \} \cup \{v_0\} \cup \{v_{i,j}: i \in [\![1,m]\!], j \in [\![1, n]\!] \}\) and \(E(S_{v_{i,1}}(F_n, m))= \{v_0v_{i,1}: i \in [\![1, m]\!] \} \cup \{v_{i,j}v_i: i \in [\![1, m]\!],j \in [\![1, n]\!] \} \cup \{v_{i,j}v_{i,j+1}: j \in [\![1, n-1]\!],\)\(i \in [\![1, m]\!] \}.\) See Fig. 5a. A star fan graph Type II as in Fig. 5(b) is also defined in another form which is denoted as \(S_{v_{i,1}}(F_n, m)\) with \(V(S_{v_{i,1}}(F_n, m)) = \{v_{i,j}: i \in [\![1,m]\!], j \in [\![1, n]\!] \} \cup \{v_0\} \cup \{v_i: i \in [\![1, m]\!] \}\) and \(E(S_{v_{i,1}}(F_n, m))= \{v_0v_{i,1}: i \in [\![1, m]\!] \} \cup \{v_{i,j}v_i: i \in [\![1, m]\!],j \in [\![1, n]\!] \} \cup \{v_{i,j}v_{i,j+1}: j \in [\![1, n-1]\!],\)\(i \in [\![1, m]\!] \}.\). The size and order are 2mn and \(m(n+1)+1\) respectively. In this context, we have delved into the intriguing realm of metric dimension, focusing our attention on star fan graphs. Our exploration into this crucial parameter of star fan graphs has revealed several compelling insights.
Theorem 140
-
(i)
\(\dim (W_{1,3})=\dim (W_{1,6})=3.\)
-
(ii)
\(\dim (W_{1,4})=\dim (W_{1,5})=2.\)
-
(iii)
\(\dim (W_{1,x+5k})= \left\{ \begin{array}{ll} 3+2k & {:} \qquad {\text {when}} \qquad x=7 \qquad {\text {or}} \qquad 8 \\ \ 4+2k & {:} \qquad {\text {when}} \qquad x=9 \qquad {\text {or}} \qquad 10 \qquad {\text {or}} \qquad 11 \end{array}\right.\)
where \(W_{1,n}\) is a wheel graph with \(n+1\) vertices.
Theorem 241
-
(i)
\(\dim (W_n)=\lfloor \frac{2n+2}{5} \rfloor\), where \(n\ge 7.\)
-
(ii)
\(\dim (F_n)=\lfloor \frac{2n+2}{5} \rfloor\), where \(n\ge 7.\)
Here \(W_n\) is a wheel graph and \(F_n\) is a fan graph repectively.
Main results
This subsection deals with metric dimension computation for a star fan graph which is a hybrid network structure.
Theorem 3
\(S_{v_i}(F_n, m)\), be a star fan graph Type I, then \(\dim (S_{v_i}(F_n, m))=m\lfloor \frac{2n+2}{5} \rfloor\).
Proof
In \(S_{v_i}(F_n, m)\), let \(H_1,H_2, \dots ,H_m\) be fan graphs induced by \(\{ v_i,v_{i,1}, \dots , v_{i,n} \}\) for \(i\in [\![1, m]\!]\), respectively. Each \(H_i\) is an isometric subgraph of \(S_{v_i}(F_n, m)\). We use \(B_i\) to represent the basis of the subgraph \(H_i\). It can be inferred from Theorem 2 that the cardinality of each \(B_i\) is \(\lfloor \frac{2n+2}{5} \rfloor\). To be more precise, \(B_i= \{v_{i,5t-3}, v_{i,5t-1} : t\in [\![1, \lfloor \frac{n}{5}\rfloor ]\!] \} \cup R\) where
The collection of all \(B_i\) forms a resolving set for \(S_{v_i}(F_n, m)\), that is, \(B=\bigcup \limits _{i=1}^{m}B_i\) is a resolving set. We prove this in the following cases. Let \(u,v \in V(S_{v_i}(F_n, m)) \setminus B\).
- Case 1::
-
\(u,v \in H_i\)
As \(B_i\) is a basis of \(H_i\), \(\exists\) \(x\in B_i\) s.t \(d(u,x) \ne d(v,x)\).
- Case 2::
-
\(u\in H_i\) & \(v \in H_j\)
Since diameter of \(H_i\) is 2, \(\exists\) \(x\in B_i\) s.t \(d(u,x)\le 2\). On the other hand, \(d(v,x)=d(v_j,v)+d(v_j,v_0)+d(v_0,v_i)+d(v_i,x)=2+d(v,v_j)+d(v_i,x)>2\). This implies \(d(u,x) \ne d(v,x)\).
- Case 3::
-
\(u\in H_i\) & \(v=v_0\).
For this case, \(\exists\) \(x\in B_j\) s.t \(d(u,x)=d(u,v_0)+d(v_0,x) >d(v_0,x)\). Since \(|B|=m\lfloor \frac{2n+2}{5} \rfloor\), \(\dim (S_{v_i}(F_n, m))\le m\lfloor \frac{2n+2}{5} \rfloor\).
The topology of \(S_{v_i}(F_n, m)\) indicates that the vertices \(\{v_{i,1}, v_{i,2}, \dots , v_{i,n}\}\) are equidistant from every vertex in \(V(S_{v_i}(F_n, m)) \setminus \{v_{i,1}, v_{i,2}, \dots , v_{i,n}\}\). Consequently, for each \(i \in [\![1, m]\!]\), some vertices from \(\{v_{i,1}, v_{i,2}, \dots , v_{i,n}\}\) must be included in every resolving set. Moreover, since each \(H_i\) is isometric, every element of the basis of \(H_i\) must also be included in the resolving set. Therefore, \(\lfloor \frac{2n+2}{5} \rfloor\) vertices from each \(H_1, H_2, \dots , H_m\) are essential to form a resolving set. It follows that \(\dim (S_{v_i}(F_n, m)) \ge m \lfloor \frac{2n+2}{5} \rfloor\). \(\square\)

Various subgraphs \(H_1,H_2,...H_6\) in \(S_{v_i}(F_6,6)\) and its basis marked in blue.
The basis, as described in Theorem 3, is illustrated in Fig. 6. In this example \(n=m=6\) and the basis is \({\mathscr {B}}= \{v_{1,2},v_{1,4},v_{2,2},v_{2,4},v_{3,2},v_{3,4},v_{4,2},v_{4,4},v_{5,2},v_{5,4},v_{6,2},v_{6,4}\}\). The representations of all vertices with respect to \({\mathscr {B}}\) are detailed in Table 1, showing that they are distinct. Therefore, \(\dim (S_{v_i}(F_6, 6))=12\).
Theorem 4
\(S_{v_{i,1}}(F_n, m)\), \(n>3\) be a star fan graph Type II, then \(\dim (S_{v_{i,1}}(F_n, m))=m\lfloor \frac{2n-2}{5} \rfloor\).
Proof
Let \(H_i\) be a subgraph induced by \(\{v_i,v_{i,3},v_{i,4},\dots , v_{i,n}\}\). Clearly \(H_i\) is isomorphic to fan graph \(F_{n-2}\). Refer Fig. 7. Let \(B_1,B_2, \dots , B_m\) be the basis of \(H_1,H_2,\dots ,H_m\), respectively. Specifically, \(B_i= \{v_{i,5t-1}, v_{i,5t+1}: t \in [\![1, \lfloor \frac{n-2}{5}\rfloor ]\!] \} \cup R\) where
Now to prove \(B= \bigcup \limits _{i=1}^{m}B_i\) is a resolving set of \(S_{v_{i,1}}(F_n, m)\), we specify the existence of a resolver \(x \in B\) for every \(u,v \in V(S_{v_{i,1}}(F_n, m)) \setminus B\) in the subsequent cases.

Various subgraphs \(H_1,H_2,...H_6\) in \(S_{v_{i,1}}(F_6, 6)\) and its basis marked in blue.
- Case 1::
-
\(u,v \in H_i\)
Since \(H_i\) has \(B_i\) as a basis, \(\exists\) \(x\in B_i\) s.t \(d(u,x) \ne d(v,x)\).
- Case 2::
-
\(u\in H_i\) & \(v \in H_j\)
Since diameter of \(H_i\) is 2, \(\exists\) \(x\in B_i\) s.t \(2 \ge d(u,x)\). But \(d(v,x)=d(v,v_{j,1})+d(v_{j,1},v_0)+d(v_{i,1},v_0)+d(v_{i,1},x)=2+d(v,v_{j,1})+d(x,v_{i,1})>2\).
- Case 3::
-
\(u\in H_i\) & \(v \in \{ v_{j,1}, v_{j,2}, v_0 \}\) , \(j\in [\![1, m]\!]\)
- Case 3.1::
-
\(v=v_{j,1}\)
When \(i=j\), \(\exists\) \(x\in B_k\) s.t \(d(x,u)=d(v_{i,1},x)+ d(v_{i,1},u)\). For \(i\ne j\), \(\exists\) \(x\in B_i\) s.t \(d(x,u)\le 2\) and \(d(x,v_{j,1})=d(v_0,v_{j,1})+d(v_0,v_{i,1})+d(x,v_{i,1}) \ge 2+d(x,v_{i,1}) >2\).
- Case 3.2:
-
\(v=v_{j,2}\)
If \(i\ne j\), then for every \(x\in B_i\), \(d(x,u)\le 2\). But \(d(x,v_{j,2})=d(x,v_{i,1})+d(v_0,v_{i,1})+d(v_0,v_{j,1})\)\(+d(v_{j,2},v_{j,1})= d(x,v_{i,1})+2+d(v_{j,2},v_{j,1}) >2\). When \(i=j\), \(\exists\) \(x\in B_i\) s.t \(d(u,x)=1\) and \(d(v,x)>1\).
- Case 3.3::
-
\(v=v_0\)
Here, we have \(x\in B_j\) s.t \(d(u,x)=d(u,v_{i,1})+d(v_{i,1},v_0)+d(v_0,x) \ge 2+d(v_0,x)\).
- Case 4::
-
\(u=v_{i,1}\) & \(v=v_{j,2}\)
When \(i=j\), \(\exists\) \(x\in B_k\) where \(k\ne i\), s.t \(d( v_{i,2},x)=1+d(v_{i,1},x)\). If \(i\ne j\), for every \(x\in B_i\), \(d(v_{j,2},x)=3+d( v_{i,1},x)\).
- Case 5::
-
\(u=v_{i,1}\) and \(v= v_0\)
For each \(x\in B_i\), \(d(v_0,x)=1+d(v_{i,1},x)\).
- Case 6::
-
\(u=v_{i,2}\) and \(v= v_0\)
\(d(v_0,x)=3\) and \(d(v_{i,2},x) \le 2\) where \(x\in B_i\). Hence, \(\dim (S_{v_{i,1}}(F_n, m))\le m\lfloor \frac{2n-2}{5} \rfloor\).
The vertices in the set \(S_i= \{v_{i,3},v_{i,4}, \dots ,v_{i,n}\}\) are equidistant from every vertex in \(V(S_{v_{i,1}}(F_n, m))\setminus \{S_i \cup \{v_{i,2}\}\}\). This observation necessitates the inclusion of vertices from \(S_i \cup \{v_{i,2}\}\) in any resolving set. Additionally, the isometric subgraphs \(H_i\) can only be resolved by elements of \(B_i\). According to Theorem 2, the size of \(|B_i|\) is \(\lfloor \frac{2n-2}{5} \rfloor\), as \(B_i\) serves as a basis for \(H_i\) which is isomorphic to \(F_{n-2}\). This argument holds true for each \(i \in [\![1, m]\!]\). Consequently, \(\dim (S_{v_{i,1}}(F_n, m))\ge m\lfloor \frac{2n-2}{5} \rfloor\).
\(\square\)
Conclusion
In this study, we have examined the metric dimension of the star fan graph, a hybrid structure combining a star graph and a fan graph. Through rigorous analysis, we have characterized the resolving set for the star fan graph and derived its exact metric dimension, emphasizing the influence of the graph’s unique structural properties. Our findings reveal that the metric dimension of the star fan graph depends on both the central star’s size and the attached fan’s structure, leading to a distinctive resolution behaviour. This work extends previous studies on standard graph families and provides a foundational understanding for analyzing composite graph structures.
While this paper focuses specifically on star fan graphs, it opens several avenues for future research. Possible directions include extending the analysis to variations of the star fan graph, such as weighted or directed versions, investigating the dynamic metric dimension in evolving networks derived from the star fan graph, exploring the computational complexity and algorithmic approaches for resolving sets in more extensive and more complex hybrid graph families and applying the results to practical domains, such as telecommunications or bioinformatics, where graph-based metrics are essential.
Data availability
All data generated or analysed during this study are included in this published article.
References
Khuller, S., Ragavachari, B. & Rosenfield, A. Landmarks in graphs. Discret. Appl. Math. 70(3), 217–229 (1996).
Melter, R. A. & Tomescu, I. Metric bases in digital geometry. Comput. Vis. Gr. Image Process. 25, 113–121 (1984).
Söderberg, S. & Shapiro, H. S. A combinatory detection problem. Amer. Math. Monthly 70, 1066–1070 (1963).
Goddard, W. Statistic mastermind revisited. J. Comb. Math. Comb. Comput. 51, 215–220 (2004).
Sebö, A. & Tannier, E. On metric generators of graphs. Math. Oper. Res. 29(2), 383–393 (2004).
Johnson, M. A. Structure-activity maps for visualizing the graph variables arising in drug design. J. Biopharm. Stat. 3, 203–236 (1993).
Slater, P. J. Leaves of trees. Congr. Numer. 14, 549–559 (1975).
Harary, F. & Melter, R. A. On the metric dimension of a graph. Ars Combin. 2, 191–195 (1976).
Chartrand, G., Eroh, L., Johnson, M. A. & Oellermann, O. Resolvability in graphs and the metric dimension of a graph. Discret. Appl. Math. 105(1), 99–113 (2000).
Manuel, P., Abd-El-Barr, M. I., Rajasingh, I. & Rajan, B. An efficient representation of Beneš networks and its applications. J. Discrete Algorithms 6(1), 11–19 (2008).
Rajan, B., Rajasingh, I., Cynthia, J. A. & Manuel, P. Metric dimension of directed graphs. Int. J. Comput. Math. 91(7), 1397–1406 (2014).
Imran, M., Baig, A. Q., Bokhary, S. A. U. H. & Javaid, I. On the metric dimension of circulant graphs. Appl. Math. Lett. 25(3), 320–325 (2012).
Grigorious, C., Manuel, P., Miller, M., Rajan, B. & Stephen, S. On the metric dimension of circulant and Harary graphs. Appl. Math. Comput. 248, 47–54 (2014).
Shao, Z., Sheikholeslami, S. M., Wu, P. & Liu, J. The metric dimension of some generalized Petersen graphs. Discret. Dyn. Nat. Soc. 10, 4531958 (2018).
Manuel, P., Rajan, B., Rajasingh, I. & Monica, M. C. On minimum metric dimension of honeycomb networks. J. Discrete Algorithms 6(1), 20–27 (2008).
Prabhu, S., Manimozhi, V., Davoodi, A. & Guirao, J. L. G. Fault-tolerant basis of generalized fat trees and perfect binary tree derived architectures. J. Supercomputing 80, 15783–15798 (2024).
Rajan, B., Rajasingh, I., Venugopal, P. & Monica, M. C. Minimum metric dimension of Illiac networks. Ars Combin. 117, 95–103 (2014).
Beardon, A. F. Resolving the hypercube. Discret. Appl. Math. 161(13), 1882–1887 (2013).
Rajan, B., Rajasingh, I., Monica, M. C. & Manuel, P. Metric dimension of enhanced hypercube networks. J. Comb. Math. Comb. Comput. 67, 5–15 (2008).
Bailey, R. F. et al. Resolving sets for Johnson and Kneser graphs. Eur. J. Comb. 34(4), 736–751 (2013).
Caceres, J. et al. On the metric dimension of Cartesian products of graphs. SIAM J. Discret. Math. 21(2), 423–441 (2007).
Bailey, R. F. & Meagher, K. On the metric dimension of Grassmann graphs. Discrete Math. Theoret. Comput. Sci. 13(4), 97–104 (2011).
Bailey, R. F. On the metric dimension of incidence graphs. Discret. Math. 341(6), 1613–1619 (2018).
Fehr, M., Gosselin, S. & Oellermann, O. R. The metric dimension of Cayley digraphs. Discret. Math. 306(1), 31–41 (2006).
Hallaway, M., Kang, C. X. & Yi, E. On metric dimension of permutation graphs. J. Comb. Optim. 28(4), 814–826 (2014).
Feng, M. & Wang, K. On the metric dimension of bilinear forms graphs. Discret. Math. 312(6), 1266–1268 (2012).
Siddiqui, H. M. A. & Imran, M. Computing the metric dimension of wheel related graphs. Appl. Math. Comput. 242, 624–632 (2014).
Prabhu, S., Deepa, S., Arulperumjothi, M., Susilowati, L. & Liu, J. B. Resolving-power domination number of probabilistic neural networks. J. Intell. Fuzzy Syst. 43(5), 6253–6263 (2022).
Arulperumjothi, M., Klavžar, S. & Prabhu, S. Redefining fractal cubic networks and determining their metric dimension and fault-tolerent metric dimension. Appl. Math. Comput. 452, 128037 (2023).
Prabhu, S., Jeba, D. S. R., Arulperumjothi, M. & Klavžar, S. Metric dimension of irregular convex triangular networks. AKCE Int. J. Gr. Combinatorics 21(3), 225–231 (2024).
Prabhu, S., Manimozhi, V., Arulperumjothi, M. & Klavžar, S. Twin vertices in fault-tolerant metric sets and fault-tolerant metric dimension of multistage interconnection networks. Appl. Math. Comput. 420, 126897 (2022).
Prabhu, S., Flora, T. & Arulperumjothi, M. On independent resolving number of TiO\(_2[m, n]\) nanotubes. J. Intell. Fuzzy Syst. 35, 6421–6425 (2018).
Liu, X., Ahsan, M., Zahid, Z. & Ren, S. Fault-tolerant edge metric dimension of certain families of graphs. AIMS Math. 6, 1140–1152 (2021).
Okamoto, F., Phinezyn, B. & Zhang, P. The local metric dimension of a graph. Math. Bohem. 135(3), 239–255 (2010).
V. Saenpholphat, P. Zhang, Connected resolving sets in graphs, Ars Combinatoria 68(1) (2003)
Kelenc, A., Tratnik, N. & Yero, I. G. Uniquely identifying the edges of a graph: The edge metric dimension. Discret. Appl. Math. 251(12), 204–220 (2018).
Chartrand, G., Salehi, E. & Zhang, P. The partition dimension of a graph. Aequationes Math. 59, 45–54 (2000).
Brigham, R. C., Chartrand, G., Dutton, R. D. & Zhang, P. Resolving domination in graphs. Math. Bohem. 128(1), 25–36 (2003).
Bustan, A. W. & Salman, A. N. M. The rainbow vertex-connection number of star fan grahs. CAUCHY-Jurnal Matematika Murni dan Aplikasi 5(3), 112–116 (2018).
Shanmukha, B. & Sooryanarayana, B. Metric dimension of wheels. Far East J. Appl. Math. 8(3), 217–229 (2002).
Imran, M., Bokhary, S. A., Ahmad, A. & Fenovcikova, A. S. On classes of regular graphs with constant metric dimension. Acta Math. Scientia 33(1), 187–206 (2013).
Funding
The authors declare that there is no funding agency that supports this research.
Author information
Authors and Affiliations
Corresponding author
Ethics declarations
Competing interests
The authors declare that there is no conflict of interest regarding the publication of this paper.
Additional information
Publisher’s note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
Open Access This article is licensed under a Creative Commons Attribution-NonCommercial-NoDerivatives 4.0 International License, which permits any non-commercial use, sharing, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons licence, and indicate if you modified the licensed material. You do not have permission under this licence to share adapted material derived from this article or parts of it. The images or other third party material in this article are included in the article’s Creative Commons licence, unless indicated otherwise in a credit line to the material. If material is not included in the article’s Creative Commons licence and your intended use is not permitted by statutory regulation or exceeds the permitted use, you will need to obtain permission directly from the copyright holder. To view a copy of this licence, visit http://creativecommons.org/licenses/by-nc-nd/4.0/.
About this article

Cite this article
Prabhu, S., Jeba, D.S.R. & Stephen, S. Metric dimension of star fan graph. Sci Rep 15, 102 (2025). https://doi.org/10.1038/s41598-024-83562-6
Received:
Accepted:
Published:
Version of record:
DOI: https://doi.org/10.1038/s41598-024-83562-6
