
Abstract
This study introduces a novel framework for dynamic reconnaissance operations using Unmanned Aerial Vehicle (UAV) swarms, designed to adapt in real time to changes in mission parameters and UAV availability. Unlike traditional models that assume static operational conditions, our approach distinguishes between two key categories of change: Type I, related to modifications in the UAV swarm (e.g., vehicle loss or deployment), and Type II, concerning adjustments in mission configuration or the area of responsibility. These are jointly addressed within a unified optimization framework based on Ant Colony Optimization (ACO), allowing efficient trajectory planning and rapid replanning during mission execution. As part of the framework, we propose a Pheromone Matrix Initialization (PMI) technique to accelerate convergence in Type I scenarios by reusing heuristic information from prior optimizations. The effectiveness of the overall framework is validated through six realistic scenarios, demonstrating its ability to maintain mission continuity with minimal delay and to respond efficiently to complex and sequential changes. Comparative analysis shows consistent superior performance over classical and state-of-the-art methods, with reductions in optimization time and mission completion time. This work delivers a practical, scalable solution for mission planning in uncertain and time-sensitive UAV operations.
Similar content being viewed by others


Introduction
Unmanned Aerial Vehicles (UAVs) have revolutionized various domains of human activity by providing unparalleled effectiveness in tasks such as exploration and reconnaissance. The increasing adoption of UAVs across diverse fields highlights their transformative impact on operational efficiency and mission effectiveness. Despite their potential, optimizing UAV operations in dynamic environments presents significant challenges, particularly in the context of real-time adjustments and mission replanning.
This study builds upon a previously developed static framework for cooperative aerial reconnaissance, which uses Ant Colony Optimization (ACO) principles to plan UAV trajectories over predefined waypoints. The framework includes two models: one for general area exploration1 and one tailored for urban environments2. These models effectively determine waypoint locations and UAV routes to maximize coverage and minimize operation time, assuming constant mission parameters and UAV availability throughout the mission lifecycle.
Expanding upon this foundational framework, the present work introduces a dynamic optimization model designed to maintain operational continuity in the face of unpredictable mission changes. Our contributions are threefold:
-
1.
Unified Framework for Dynamic Reconnaissance: We propose an integrated model that accounts for dynamic environmental changes categorized into two types. Type I changes affect the UAV swarm (e.g., UAV failures or additions). Type II changes impact the mission configuration (e.g., expansion or relocation of the Area of Responsibility—AOR).
-
2.
Scenario-Responsive Replanning Strategies: Our model handles each change type through tailored replanning strategies while enabling seamless operation continuation. For Type I scenarios, we reuse the original waypoints and introduce an adaptive replanning mechanism that accounts for the current state of UAVs. For Type II scenarios, a new set of waypoints is deployed based on updated AOR specifications, with optimization accounting for previously completed tasks. The framework also supports hybrid scenarios involving simultaneous changes in both UAV resources and mission requirements.
-
3.
Pheromone Matrix Initialization (PMI) for Accelerated Optimization: To enhance computational efficiency in replanning scenarios—particularly Type I—we propose a novel PMI principle that initializes pheromone trails using historical optimization data. This approach improves convergence speed and optimization quality during replanning, as supported by experimental validation across multiple scenarios.
By extending the capabilities of the original static models to accommodate real-time changes, our work offers a robust and adaptable solution for UAV mission planning in operationally dynamic environments. This research is particularly relevant to military and emergency response contexts, where agility, resilience, and speed are paramount. Moreover, the model is implemented within the Tactical Decision Support System (TDSS)3, enhancing its practical applicability for field commanders engaged in UAV-assisted reconnaissance. Planning reconnaissance operations with a swarm of UAVs is a key component of this system1,2. Further details on this topic can be found in4,5,6.
The remainder of this article is structured as follows. The next section surveys the state of the art, situating our work within the broader landscape of UAV operations and dynamic mission planning. Following that, we introduce the foundational methodology, including the original static reconnaissance models and the optimization algorithm. We then extend this framework to dynamic environments, detailing the models developed for handling both Type I and Type II scenario changes, as well as the proposed Pheromone Matrix Initialization (PMI) technique. Subsequently, we present the experimental validation of the proposed models, offering quantitative results that demonstrate the framework’s adaptability and efficiency. Finally, we conclude the paper with key findings and limitations, and outline directions for future research.
Literature review
The use of UAVs across various human activities has become increasingly common, significantly enhancing operational effectiveness. Exploration and reconnaissance are among the key domains where UAVs can dramatically improve efficiency. Numerous studies have focused on this topic. In this section, we discuss the dynamic aspects of these studies to contextualize our research.
Xiao et al.7 discuss a distributed dynamic area coverage algorithm designed for multi-UAV systems, aimed at enhancing coverage efficiency in tasks such as search and monitoring operations. The proposed algorithm leverages reinforcement learning to address challenges such as the non-stationarity under communication constraints. It improves UAV cooperation by sharing strategies and experiences, which accelerates learning and optimizes coverage point planning. Additionally, it adapts to environments with obstacles by incorporating a coverage point adjustment method specifically designed to handle such challenges.
Similarly, Li et al.8 present a solution for UAV path planning in dynamic environments, focusing on target coverage tasks. Their approach combines a greedy allocation strategy for assigning target points to UAVs with an improved ant colony optimization algorithm, featuring variable pheromone factors to enhance path planning efficiency. The method also includes dynamic replanning to accommodate changes in the coverage task.
Lu et al.9 propose an algorithm for path planning of fixed-wing UAVs in a dynamic three-dimensional environment. This algorithm expands the tree structure by incorporating constraint equations that reflect the actual dynamic constraints of fixed-wing UAVs. It considers the locations of dynamic obstacles at each time step to avoid collisions, taking into account both the UAVs’ and obstacles’ current positions over time to generate a collision-free path.
Another approach to avoiding dynamic obstacles is proposed by Luo et al.10. They study the use of Deep-Sarsa, an on-policy reinforcement learning technique, for UAV path planning and obstacle avoidance. The results show that the trained Deep-Sarsa model can successfully guide UAVs to their targets without collisions, marking the first time Deep-Sarsa has been applied to achieve autonomous path planning and obstacle avoidance in dynamic environments.
The dynamic aspect in the studies mentioned above lies in the collision avoidance of obstacles that may appear during area exploration. Another perspective on this topic is the factor of uncertainty. Zammit and van Kampen11 present a study on real-time three-dimensional path planning for UAVs in dynamic and uncertain environments. They evaluate the performance of two algorithms (A* and RRT) and investigate the impact of environmental uncertainty. The authors assume that uncertainty can affect both the UAV itself and the environment, modeling various uncertainty sources using bounding shapes. The study finds that both UAV positional uncertainties and obstacle uncertainties deteriorate path planning performance.
Boiteau et al.12 focus on enabling UAVs to autonomously navigate and perform tasks in environments where GPS signals are weak or nonexistent and visibility is impaired by factors such as smoke, fog, or other visual obscurants. The proposed algorithms provide an approach to decision-making under uncertainty in such environments. However, the limitations observed in the presence of visual obscurants indicate the need for further development, particularly in enhancing the robustness of target detection under these conditions. This research is particularly relevant to the expansion of the operational scope of UAVs in critical and hazardous scenarios.
Yang et al.13 address the dynamic reassignment of tasks among multiple UAVs in unpredictable environments. They propose a distributed framework for task reassignment that adjusts to dynamic events, such as the addition, deletion, or modification of tasks during the execution of the original schedule. To support this framework, the authors introduce a Partial Reassignment Algorithm (PRA) that enables only a subset of UAVs to respond to changes, thereby reducing computational and communication burdens. The proposed mechanisms form smaller teams of UAVs to handle specific tasks, improving efficiency and minimizing the impact on the original task schedules. The goal is to maximize the number of tasks assigned by carefully selecting which tasks to reassign and which UAVs to involve. Simulations demonstrate the method’s effectiveness in various scenarios, showing a balance between solution quality and computational efficiency.
Seok et al.14 present an autonomous mission planner for UAV patrolling missions in unpredictably dynamic environments. The planner uses recomposable restricted finite state machines to model these environments, where waypoints, priorities, and paths can change unpredictably. Dynamic programming generates policies, while limited breadth-first search quickly creates solutions for single UAV tours. The paper also introduces patrolling strategies for multiple UAVs by combining multiple mission state machines and adjusting their inputs, demonstrated through a proof-of-concept with two UAVs.
Zhang et al.15 discuss the deployment of UAVs as aerial base stations to enhance communication services in large, dynamic, and unreliable environments. They introduce the Partition, Assign, Deploy, and Redeploy (PADR) framework, which dynamically adjusts the positions of UAV base stations to maintain high Quality of Service (QoS) despite challenges like user movement and UAV reliability issues. The framework efficiently manages the deployment of multiple UAVs by dividing the environment into sub-blocks and continuously adapting to changes in real time, as demonstrated through simulation experiments.
The optimization of UAV trajectories represents a significant and extensively studied area within computational research. Given the NP-hard nature of many trajectory planning problems, metaheuristic algorithms have emerged as effective solution techniques. Among these, bio-inspired approaches—particularly Ant Colony Optimization (ACO) algorithms, modeled on the foraging behavior of ants—have demonstrated considerable success in addressing complex optimization tasks, including those encountered in UAV operations. Foundational methods such as the Ant Colony System (ACS)16 and the Max-Min Ant System (MMAS)17 have laid the groundwork for subsequent ACO-based strategies. To enhance performance and address inherent limitations, these algorithms are frequently hybridized with complementary techniques. Notable examples include the integration of ACO with Variable Neighborhood Search (ACO-VNS)18 and with Simulated Annealing (ACOSA)19, both of which have shown effectiveness in solving classical combinatorial optimization problems by improving convergence behavior and solution quality.
A notable advancement in hybrid path planning for dynamic environments was proposed by Lu and Da20, who integrated ACO with the Dynamic Window Approach (DWA) to create a two-level planning framework. Their method employs an improved ACO algorithm with adaptive heuristic adjustments and a novel cone pheromone strategy to enhance global path planning, while the DWA component ensures real-time obstacle avoidance through refined velocity sampling and path-direction evaluation. This dual-layer approach significantly improves path optimality and smoothness, particularly in complex, obstacle-rich settings. The study demonstrates that combining metaheuristic global planners with local reactive modules can produce robust trajectories and fast convergence even under changing conditions. This work extends the applicability of ACO-based methods to more volatile operational scenarios and complements our focus on dynamic mission environments by showcasing how hybrid architectures can maintain mission continuity and safety in real time.
Further expanding the use of Ant Colony Optimization in dynamic settings, Niu et al.21 introduced ACOSRAR, an improved continuous-space ACO variant tailored for UAV path planning in complex and uncertain environments. Their approach enhances traditional ACO through a novel state transition rule that combines Brownian motion and Lévy flights, enabling the algorithm to escape local optima more effectively. Additionally, ACOSRAR incorporates an adaptive waypoint repair mechanism to ensure path feasibility in constrained 3D spaces. Importantly, the authors integrate this with the DWA to support real-time local adjustments, allowing UAVs to avoid moving obstacles during mission execution. This work is particularly relevant to dynamic reconnaissance operations, as it demonstrates how ACObased frameworks can be enhanced for real-time adaptability and improved robustness in highly variable environments.
Chen et al.22 proposed a hybrid approach to collaborative UAV swarm trajectory planning by enhancing the Grey Wolf Optimizer (GWO) with pheromone-inspired components drawn from Ant Colony Optimization and adaptive learning mechanisms. Their model introduces a pheromone factor into GWO to strengthen cooperative search behavior and incorporates deep reinforcement learning to dynamically tune optimization parameters based on environmental feedback. This hybrid algorithm enables UAV swarms to efficiently navigate dynamic threat environments by improving both the stability and optimality of generated trajectories. The integration of biologically inspired optimization and learning-based adaptation broadens the scope of swarm intelligence methods, offering promising capabilities for real-time, cooperative path planning in contested or unpredictable scenarios.
There are numerous studies addressing various aspects of using UAVs for different applications in dynamic and unpredictable environments. The publications mentioned above represent just a small portion, as a complete list would be extensive. To the best of our knowledge, no existing study approaches the topic from the same angle and with the same level of detail as this article.
UAV reconnaissance framework
This section provides an overview of the existing framework for conducting reconnaissance missions using a swarm of UAVs in static environments, along with the optimization method employed to generate solutions.
UAV reconnaissance models in static environments
In our previous studies, we proposed two models for UAV-based reconnaissance operations, both of which assume a static environment throughout the duration of the mission. These models are outlined as follows:
-
Model of cooperative aerial reconnaissance of the area of responsibility1. This model plans trajectories for multiple UAVs to explore a polygon-bounded area as thoroughly and quickly as possible.
-
Model of cooperative aerial reconnaissance in an urban environment2. This model plans trajectories for multiple UAVs to explore objects of interest (such as buildings and roads) within a specified area as thoroughly and quickly as possible.
The proposed models rely on a defined set of parameters and variables that characterize both the UAVs and the reconnaissance scenarios, including flight dynamics, sensor characteristics, and mission-specific constraints. Table 1 summarizes these parameters, such as UAV speed, endurance, monitoring and turning times, refueling duration, and sensor field of view. These variables form the foundation for trajectory planning, waypoint deployment, and the overall optimization framework implemented in the models.
Both models operate in two key phases: (a) planning the number and placement of waypoints to ensure complete coverage of the area or objects of interest, and (b) planning the trajectories for the UAV swarm to fly over the waypoints and carry out the reconnaissance operation. In the former phase, the goal is to determine and deploy waypoints to ensure the area or objects of interest are covered as thoroughly as possible. In the latter phase, the objective is to plan the trajectories to minimize the operation time.
The principle is illustrated in Fig. 1. The top two figures show the two phases of the cooperative aerial model for exploring the area of responsibility bounded by a polygon. Three UAVs are available at specified locations to conduct the reconnaissance operation. Figure 1a presents the first phase, where waypoints (yellow dots) are deployed to cover the entire area using the UAVs’ sensor systems. Figure 1b depicts the trajectories for individual UAVs, with the exploration share evenly distributed to complete the operation as quickly as possible. The two bottom figures present the model of reconnaissance in an urban environment. Objects of interest include buildings (grey polygons) and roads (thick gray lines) within the selected area. The deployment of waypoints to cover all objects is depicted in Fig. 1c, showing the direction of the sensors for buildings (dashed lines) and the coverage range for roads (yellow circles). Figure 1d presents the trajectories for the UAVs to perform the operation.

Principles of cooperative aerial reconnaissance in static environments.
At the beginning of the operation, there are \(\:m\ge\:1\) vehicles available: \(\:U=\left\{{U}_{1},{U}_{2},\dots\:,{U}_{m}\right\}\). The waypoints deployed by the models are denoted as \(\:W=\left\{{W}_{1},{W}_{2},\dots\:,{W}_{n}\right\}\), where \(\:n\) is their number. Information about each waypoint \(\:{W}_{i}\in\:W\) includes the position, the height of the UAV above the ground surface when monitoring from this waypoint, the azimuth and elevation of the sensor system, and the distance between the waypoint and the monitored object. The flight route \(\:{R}_{i}\) for each vehicle \(\:{U}_{i}\in\:U\) is defined as a sequence of waypoints to be visited in the given order, including the starting location and the final location at the base, where each vehicle must return at the end of the operation.
Neither model accounts for potential changes in the environment or mission parameters. The trajectories are fully planned for the entire operation before execution. If any changes occur during the operation, such as the failure of a UAV or the need to modify mission parameters, the models are unable to respond except by replanning the entire operation from scratch.
Optimization algorithm to plan the reconnaissance operation
For planning the vehicles’ trajectories, we employ a metaheuristic algorithm developed in our previous research23. The problem can be viewed as a modification of the well-known Multi-Depot Vehicle Routing Problem (MDVRP). The result of the optimization is a set of routes \(\:{R}_{i}\in\:R\), each representing the sequence of waypoints to be served by an individual UAV \(\:{U}_{i}\in\:U\).
The proposed algorithm, referred to as Adaptive Ant Colony Optimization with Node Clustering (AACO), addresses well-known limitations of traditional ACO approaches such as premature convergence and sensitivity to control parameters.
Its core innovation is the integration of a structured node clustering mechanism, where candidate nodes for transitions are grouped into multiple clusters based on both proximity and graph topology. This enables a more focused yet comprehensive exploration of the solution space through a two-step selection process: choosing a cluster and then a node within it.
To address the challenge of premature convergence and parameter sensitivity typical of ACO algorithms, the pheromone evaporation rate is adaptively controlled using Shannon entropy. This entropy reflects the diversity of solutions within the ant population—encouraging faster convergence when diversity is high and slowing it when the population becomes homogeneous. Additionally, the algorithm applies a hybrid local search (modified k-Opt) and simulated annealing-inspired pheromone updates to further enhance solution quality.
As a foundational principle, this work establishes a dynamic optimization framework where ACO is guided by structured clustering and entropy-based adaptation, enabling robust, scalable solutions for complex routing problems.
Modelling reconnaissance operations in dynamic environments
In this section, we introduce a framework for conducting reconnaissance missions using UAV swarms in dynamically changing environments. We begin with an overview of the overall architecture of the framework. Next, we extend existing static reconnaissance models to incorporate adaptability to environmental and operational changes. Subsequently, we present an enhanced optimization algorithm that facilitates efficient replanning of operations following a change event, leveraging heuristic information derived from the initial solution. Finally, we offer a detailed discussion of the proposed models and their applicability to dynamic operational scenarios.
Architecture of the UAV reconnaissance framework in dynamic environments
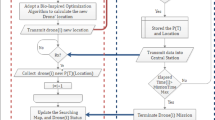
Figure 2 illustrates the overall architecture of the proposed UAV reconnaissance framework. The process begins with the input of initial mission parameters and the composition of the initial UAV swarm. Based on these inputs, waypoints are deployed to cover the designated area of responsibility. Subsequently, routes are planned for each UAV in the swarm using the optimization algorithm. Once the route planning is completed, the UAVs proceed to execute the mission.
During the execution phase, the system continuously monitors for changes in mission conditions or UAV availability. If a change is detected—such as a modification to the area of responsibility or the UAV configuration—appropriate updates to mission parameters and/or the UAV swarm are generated.
Depending on the nature of the change, the system either redeploys waypoints or reuses the existing ones. The replanning process then recalculates new routes using the updated inputs, possibly leveraging heuristic information from the original solution. The revised plan is then executed, allowing the reconnaissance operation to continue with minimal disruption.
The diagram highlights the feedback loop from the change detection back to waypoint deployment and route planning, emphasizing the adaptability of the framework to dynamic operational environments. Although the diagram illustrates a single change event for simplicity, the proposed framework is capable of handling multiple sequential changes during the reconnaissance operation, each triggering a corresponding update and replanning process.

Architecture of the UAV reconnaissance framework in dynamic environments.
Scenarios for UAV reconnaissance operations in dynamic environments
The models proposed in this section utilize the same notation for parameters and variables as defined in Table 1. An apostrophe is used to denote updated values or entities after a change event, distinguishing them from their original counterparts (e.g., \(\:{U}^{{\prime\:}}\) represents the updated UAV swarm after a change).
The changes in the environment can be categorized into two general scenario types:
-
I.
Changes affecting reconnaissance assets, i.e., UAVs, including changes in their number or parameters (mobility and sensor capabilities).
-
II.
Changes affecting the mission configuration, including modifications to the definition of the area of responsibility (AOR) or the tactical parameters of the mission.
Type I scenarios include changes occurring during the reconnaissance operation that affect any vehicle in the swarm. Each vehicle \(\:{U}_{i}\in\:U\) is defined by a set of parameters, such as average flight speed, air endurance, refueling options, time required to monitor the area from a waypoint, and the ability to change direction suddenly, including its impact on flight characteristics. When any change occurs to any vehicle \(\:{U}_{i}\in\:U\) during the operation (after it starts and before it ends), a Type I scenario occurs. Typical cases include the failure of any UAV in the swarm (possibly due to enemy action) or changes in mobility capabilities due to weather conditions. A less likely case is the addition of new UAVs to accelerate the operation.
Type II scenarios include changes occurring during the reconnaissance operation that affect tactical and mission configurations. These changes typically relate to modifications in the defined AOR boundaries in response to battlefield dynamics. The most likely cases include the extension of the AOR or its relocation to a new area close to the original one. Other cases involve tactical requirements, such as minimum or maximum flight height conditions for UAVs, which may impact the size of the area covered by sensors when monitoring from waypoints, or other specific requirements to monitor objects (for example, in the urban reconnaissance model, this includes minimum distance from buildings). When conditions for both Type I and Type II scenarios are met, the situation is generally considered a Type II scenario.
Both scenarios have different impacts on resolving the situation. While Type I scenarios do not require redeployment of waypoints, this is mandatory for Type II scenarios. Both types then need to determine new flight routes for the UAVs that remain available. More information is provided in the subsequent sections.
Modelling reconnaissance operations for type I scenarios
Type I scenarios use the original set of waypoints \(\:W=\left\{{W}_{1},{W}_{2},\dots\:,{W}_{n}\right\}\), as waypoints do not need to be relocated. However, a new set of UAVs and their parameters must be specified: \(\:{U}^{{\prime\:}}=\left\{{U}_{1}^{{\prime\:}},{U}_{2}^{{\prime\:}},\dots\:,{U}_{{m}^{{\prime\:}}}^{{\prime\:}}\right\}\), where \(\:{m}^{{\prime\:}}\ge\:1\) may differ from the original number. Most of the UAVs in sets \(\:U\) and \(\:{U}^{{\prime\:}}\) are typically the same vehicles, i.e., some vehicles \(\:{U}_{i}\in\:U\) correspond to \(\:{U}_{j}^{{\prime\:}}\in\:{U}^{{\prime\:}}\), though their mobility parameters, positions, and other state parameters—such as remaining airborne time—may differ. Some vehicles \(\:{U}_{i}\in\:U\) may not be included in \(\:{U}^{{\prime\:}}\), and there may be new vehicles \(\:{U}_{j}^{{\prime\:}}\in\:{U}^{{\prime\:}}\) that were not originally in \(\:U\).
The change occurs at time \(\:{t}^{{\prime\:}}\) within the interval \(\:\left(0,T\right)\), where \(\:T\) is the total time of the originally planned operation, i.e., the time when the last UAV returns to its base after completing its route. A flight route for each vehicle \(\:{U}_{i}\in\:U\) is denoted as the sequence \(\:{R}_{i}=\left({r}_{1}^{i},{r}_{2}^{i},\dots\:,{r}_{{n}_{i}}^{i}\right)\), where \(\:{n}_{i}\) is the length of the route, \(\:{r}_{1}^{i}={U}_{i}^{s}\) is the initial position of the vehicle at the start of the operation, \(\:{r}_{{n}_{i}}^{i}={U}_{i}^{d}\) is the base station of the vehicle as its final destination, and \(\:{r}_{j}^{i}\in\:W\) for all \(\:j\) such that \(\:1<j<{n}_{i}\) are the waypoints visited during the operation (these can also include the base station if the vehicle needs to refuel or recharge batteries, in which case \(\:{r}_{j}^{i}={U}_{i}^{d}\)). The symbol \(\:{t}_{j}^{i}\) denotes the time when vehicle \(\:{U}_{i}\) arrives at location \(\:{r}_{j}^{i}\in\:{R}_{i}\), with \(\:{t}_{1}^{i}=0\) and \(\:{t}_{j}^{i}<{t}_{k}^{i}\le\:T\) for all \(\:j<k\).
Let \(\:{W}^{*}\subseteq\:W\) be the set of waypoints from which monitoring has already been performed before the change occurs at time \(\:{t}^{{\prime\:}}\), and let \(\:{W}^{{\prime\:}}\subseteq\:W\) be the set of waypoints that have not yet been visited, with \(\:W={W}^{*}\cup\:{W}^{{\prime\:}}\). The operation is to be completed using the new swarm \(\:{U}^{{\prime\:}}\) on the set \(\:{W}^{{\prime\:}}\), i.e., the trajectories for all vehicles in \(\:{U}^{{\prime\:}}\) are planned so that each waypoint \(\:{W}_{i}\in\:{W}^{{\prime\:}}\) is visited once, with the objective of minimizing the time of the operation. Each vehicle \(\:{U}_{j}^{{\prime\:}}\in\:{U}^{{\prime\:}}\) has its initial position \(\:{U}_{j}^{{\prime\:}s}\). If this vehicle is one of the original vehicles in \(\:U\), then this initial position corresponds to the actual position of the vehicle at time \(\:{t}^{{\prime\:}}\) within the reconnaissance operation, and other state parameters must also be considered.
Figure 3 presents the algorithm in pseudocode to replan the operation after the change. In the first part (lines 1 to 5), waypoints not yet visited are stored in the set \(\:{W}^{{\prime\:}}\) by inserting yet unvisited waypoints from \(\:R\). Unvisited waypoints are those that were scheduled to be served after the change at time \(\:{t}^{{\prime\:}}\), taking into account the time required to complete monitoring (monitoring must be completed to mark the waypoint as visited; note the parameter \(\:{U}_{i}^{monitor}\) on line 4). Then, the new trajectories \(\:{R}^{{\prime\:}}\) for all the vehicles in \(\:{U}^{{\prime\:}}\) are planned (line 6) using the same planner that was used for planning the original routes \(\:R\). However, some modifications in this planner are employed to accelerate the optimization process. The total time of the operation after the change is updated to \(\:T=\:{t}^{{\prime\:}}+{T}^{{\prime\:}}\).

Algorithm to replan the reconnaissance operation for type I scenarios.
The proposed principle is illustrated in the remaining part of this section. Figure 4 presents an example scenario with 3 vehicles \(\:U=\left\{{U}_{1},{U}_{2},{U}_{3}\right\}\) and 16 waypoints. The planned routes for each vehicle are listed on the right. The time progression of the operation is depicted in Fig. 5. The time of change \(\:{t}^{{\prime\:}}\) is represented by a dashed vertical line. Yellow nodes indicate already visited waypoints (set \(\:{W}^{*}\)), grey nodes indicate unvisited waypoints (set \(\:{W}^{{\prime\:}}\)).

Example operation for type I scenario.

Time progression of the example operation.
The change is caused by the failure of vehicle \(\:{U}_{2}\in\:U\) at time \(\:{t}^{{\prime\:}}\), so the operation must be completed with only two vehicles \(\:{U}^{{\prime\:}}=\left\{{U}_{1}^{{\prime\:}},{U}_{2}^{{\prime\:}}\right\}\), where \(\:{U}_{1}^{{\prime\:}}\) corresponds to \(\:{U}_{1}\) and \(\:{U}_{2}^{{\prime\:}}\) corresponds to \(\:{U}_{3}\). Figure 6 shows the situation after the change. The actual positions of the vehicles at time \(\:{t}^{{\prime\:}}\) are presented using UAV icons. The dashed lines represent the routes before the change, while the solid lines represent the routes replanned after the change. The new routes \(\:{R}^{{\prime\:}}\) are listed on the right. As can be seen, the remaining waypoints (\(\:{W}_{11},{W}_{14}\)) originally assigned to vehicle \(\:{U}_{2}\) are now part of route \(\:{R}_{2}^{{\prime\:}}\) of vehicle \(\:{U}_{2}^{{\prime\:}}\).

Replanning the operation after a type I change.
Figure 7 illustrates the progress of the entire operation completed after the failure of \(\:{U}_{2}\). As shown, the total time of the operation is longer after the failure because only two vehicles are available to complete it. The original end of the operation \(\:T\) is shown for reference.

Time progression of the example operation following the failure of \(\:{U}_{2}\)
Modelling reconnaissance operations for type II scenarios
Type II scenarios require a new set of waypoints, as the original set \(\:W\) might not adequately cover the newly specified area of responsibility (denoted as \(\:{AOR}^{{\prime\:}}\)). However, if the changes to the AOR are minor, some of the original waypoints could still be used. Let \(\:{W}^{*}\subseteq\:W\) denote the set of waypoints where monitoring was completed before the change occurred at time \(\:{t}^{{\prime\:}}\). These waypoints are significant because parts of the \(\:{AOR}^{{\prime\:}}\) might already be covered.
Figure 8 shows the algorithm in pseudocode for replanning the operation after a Type II change. First, a new set \(\:{W}^{{\prime\:}}\) of waypoints is deployed (line 1), taking the new \(\:{AOR}^{{\prime\:}}\) as input (including other parameters influencing the deployment) and using the algorithm from the original models (either area or urban reconnaissance). Then, the set \(\:{W}^{*}\), containing waypoints already visited before the change, is created (lines 2 to 6). Subsequently, all waypoints in \(\:{W}^{{\prime\:}}\) that correspond to waypoints in \(\:{W}^{*}\) are removed from \(\:{W}^{{\prime\:}}\) as monitoring from these waypoints has already been performed (lines 7 to 10). This correspondence is expressed by the equation on line 9; however, depending on the model, this can mean that the waypoints are in close vicinity. Finally, the new trajectories are planned (line 11).

Algorithm to replan the reconnaissance operation for type II scenarios.
Figure 9 illustrates the principle. On the left, an urban reconnaissance operation is planned with three UAVs available. On the right, the operation is replanned following a change in the AOR. The original waypoints from \(\:W\) that are outside the new \(\:{AOR}^{{\prime\:}}\) are removed, except for those already visited, which remain to depict the routes before the change (grey nodes). The waypoints that lie in both the original and new AORs remain; yellow nodes represent waypoints to be visited, while grey nodes are those already visited. Additionally, new waypoints are inserted to cover objects that were not in the original AOR but are in the new one. There is no change in the swarm of UAVs (\(\:{U}^{{\prime\:}}=U\)); only the actual positions and state parameters differ depending on the time of the change.

Replanning the operation after a type II change.
Improvement of the optimization algorithm for type I scenarios
In Type II scenarios, finding a solution, i.e., determining routes for individual UAVs in the swarm after a change (see line 6 in Fig. 3 and line 11 in Fig. 8), constitutes an entirely new optimization task. However, in Type I scenarios, where waypoints remain unchanged, modifications to the optimization algorithm (AACO) can be made to accelerate optimization by utilizing heuristic information acquired from the initial optimization in which the original routes were planned.
The ACO principle is based on finding solutions by ants in a colony. Ants that find a promising solution leave pheromone trails along their route. A pheromone trail connects two vertices in a graph. These pheromone trails influence other ants in subsequent iterations, gradually evolving to form an optimal or high-quality solution. After the optimization, the matrices of pheromone trails, one for each vehicle, can be stored for future use. In these matrices, every combination of pairs of vertices is evaluated by the strength of a pheromone trail, which expresses the likelihood of this combination being part of the final route for each vehicle.
In Type I scenarios, since the waypoints are not relocated, original pheromone matrices can be used in subsequent optimization problems when a change occurs and new trajectories need to be found (line 6 in Fig. 3). Let \(\:{\tau\:}^{k}\) be the pheromone matrix obtained from the initial optimization for vehicle \(\:{U}_{k}\in\:U\), where \(\:{\tau\:}_{ij}^{k}\) represents the pheromone trail between waypoints \(\:{W}_{i}\in\:W\) and \(\:{W}_{j}\in\:W\).
In the initial optimization, all pheromone trails are uniformly initialized using Eq. (1) because there is no prior information about the likelihood of route sections being part of the solution.
When the change occurs, a new optimization is performed with the swarm \(\:{U}^{{\prime\:}}\) and the waypoints \(\:{W}^{{\prime\:}}\). Although the sets \(\:W\) and \(\:{W}^{{\prime\:}}\) may differ in the number of waypoints, each waypoint in \(\:{W}^{{\prime\:}}\:\)is also contained in \(\:W\); that is, each \(\:{W}_{i}\in\:{W}^{{\prime\:}}\) is also an element of \(\:W\). This second optimization initializes the pheromone matrices \(\:{\tau\:}^{{\prime\:}}\) based on the matrices \(\:\tau\:\) obtained from the first optimization, using the algorithm outlined in Fig. 10.
This technique, called Pheromone Matrix Initialization (PMI), updates the strength of each pheromone trail in the matrices \(\:{\tau\:}^{{\prime\:}}\) in two phases. The first phase (lines 1 to 5) applies to all vehicles that are in \(\:U\) and remain in \(\:{U}^{{\prime\:}}\); the condition \(\:{U}_{k}^{{\prime\:}}={U}_{l}\in\:U\) on line 4 indicates that vehicle \(\:{U}_{k}^{{\prime\:}}\in\:{U}^{{\prime\:}}\) is one of the vehicles \(\:{U}_{l}\in\:U\). In this case, values from the original matrix \(\:{\tau\:}^{l}\) are added to matrix \(\:{\tau\:}^{{\prime\:}k}\), for all pairs of waypoints in \(\:{W}^{{\prime\:}}\). The second phase (lines 6 to 10) addresses situations where a vehicle originally in \(\:U\) is no longer available in \(\:{U}^{{\prime\:}}\). In this scenario, values from the original matrix \(\:{\tau\:}^{l}\) are added to all matrices \(\:{\tau\:}^{{\prime\:}k}\) for all \(\:{U}_{k}^{{\prime\:}}\in\:{U}^{{\prime\:}}\).
This approach allows for the distribution of heuristic information about promising route sections from the initial optimization to the subsequent optimization, even for vehicles that are no longer available to continue the operation, thereby enhancing the performance of the optimization process in terms of both optimization time and mission completion time.

Algorithm to initialize pheromone matrices using information from previous optimization.
Discussion
The preceding sections outlined the methodologies for handling type I and type II scenarios of change. Nonetheless, these approaches can be applied simultaneously when changes satisfy the criteria for both types. Specifically, this involves changes in the AOR and/or parameters affecting its coverage, alongside changes within the UAV swarm. In such cases, the situation can be treated as a type II scenario. The algorithm presented in Fig. 8 is designed to accommodate changes in the UAV swarm (as indicated in line 11, where trajectories are recalculated for the new swarm \(\:{U}^{{\prime\:}}\)).
At the time of change \(\:{t}^{{\prime\:}}\), the UAVs from the original swarm \(\:U\), which will continue the reconnaissance in the revised swarm \(\:{U}^{{\prime\:}}\), are in a state that must be considered during planning. In addition to their current positions, which become the starting positions in \(\:{U}^{{\prime\:}}\), it is crucial to consider the time spent in the air and the time required to finish refueling or recharging batteries. In the first scenario, the change occurs while the UAV is airborne. Given each UAV’s endurance limitations, the time spent in the air reduces this endurance before refueling or recharging is necessary. The second scenario occurs when the change happens while the UAV is refueling or recharging its batteries at the base station. The UAV must be fully refueled or recharged before resuming the operation. Both state parameters—air time already spent and remaining refueling time—are integrated into these models to ensure the continuity and feasibility of the reconnaissance mission.
The proposed model also accommodates multiple changes within a single operation. The first change occurs at time \(\:{t}^{{\prime\:}}\), after which the reconnaissance continues with swarm \(\:{U}^{{\prime\:}}\) in the new \(\:{AOR}^{{\prime\:}}\). A second change occurs at time \(\:{t}^{{\prime\:}{\prime\:}}\) within the interval \(\:\left({t}^{{\prime\:}},{T}^{{\prime\:}}\right)\), and the reconnaissance proceeds with swarm \(\:{U}^{{\prime\:}{\prime\:}}\) in the updated \(\:{AOR}^{{\prime\:}{\prime\:}}\). The proposed algorithms function according to the same principles regardless of the number of changes, and addresses each change individually.
When a change occurs, the requirement is to replan the operation as quickly as possible to minimize delays. The time needed for this replanning is not considered in this model. However, this time is examined and discussed in the next section, which deals with experiments.
Experiments and discussion
The proposed model has been validated through a series of experiments based on typical reconnaissance scenarios.
Scenarios and parameters for experiments
In all the experiments, UAVs with identical technical and sensor parameters were used. The complete parameter settings are listed in Table 2. The only difference between scenarios is the requested flight height above ground level, which determines the altitude from which monitoring is performed.
Table 3 presents the parameters of the six scenarios proposed for model validation. For each scenario, the table lists the size of the AOR, the number of UAVs available for the operation, and the number of waypoints deployed according to the reconnaissance model. The last two columns indicate the type of change and the time at which it occurs. In scenario d05, both Type I and Type II changes are combined, while scenario d06 involves two separate change events.
Description of change events:
-
d01: One UAV fails; the operation continues with the two remaining UAVs.
-
d02: Two UAVs fail simultaneously; the operation continues with the three remaining UAVs.
-
d03: The AOR expands to 98,753 m2. A new set of waypoints is deployed for the expanded AOR, and the operation continues with all original UAVs.
-
d04: The AOR expands to 54,759 m2. A new set of waypoints is deployed for the expanded AOR, and the operation continues with all original UAVs.
-
d05: Two UAVs fail simultaneously, and the flight/monitoring height is lowered from 50 to 40 m. The operation continues with the four remaining UAVs. Although the AOR remains unchanged, the reduced monitoring height decreases sensor coverage, necessitating the deployment of a new set of waypoints.
-
d06: Two sequential changes occur, with one UAV failing in each instance. After the first failure, the operation continues with the two remaining UAVs; after the second failure, it continues with the last remaining UAV.
All experiments were conducted on a computer with an Intel Core i9-10940X @ 3.30 GHz processor and 32 GB of RAM. For each scenario, 100 optimizations were performed both for the initial operation planning and for replanning after the change event occurred. The datasets containing the scenarios and experimental results are available for download at https://zenodo.org/records/14808308.
Results
Table 4 presents the results of the optimization task for planning the operation before it starts. The best and average solutions, measured as the total time to complete the operation (denoted \(\:T\)), are recorded along with the standard deviation. The second-to-last column shows the average number of waypoints (denoted as \(\:{W}^{*}\)) served before the change occurs at time \(\:{t}^{{\prime\:}}\). The last column reports the average time taken by the optimization algorithm to find a solution. The algorithm consistently produces stable results; the difference between the best and average solutions is within a few seconds, and the standard deviation does not exceed 2 s in any case. The optimization time reflects the impact of problem size (i.e., the number of waypoints deployed) on computation time. While it is less than 10 s for fewer than 100 waypoints, it is over 70 s for scenario d02, which includes 195 waypoints.
Table 5 presents the results of the second optimization for each scenario when the change event occurs. First, the average number of waypoints \(\:{W}^{{\prime\:}}\) that need to be served after the change is shown. In Type I scenarios (d01, d02, d06), these are the waypoints that remain unserved in the original set \(\:W\). In contrast, for Type II scenarios (d03, d04, d05), the waypoints are redeployed according to the new conditions. The total operation time \(\:{T}^{{\prime\:}}\) is presented independently—that is, it is calculated as if the time of change \(\:{t}^{{\prime\:}}\) marks the start of the operation; to determine the full duration of the operation, \(\:{t}^{{\prime\:}}\) must be added to \(\:{T}^{{\prime\:}}\).
The results exhibit greater variability (with standard deviations ranging from 2 to 11 s), which arises from differing initial states in the second optimization. While each execution of the first optimization always starts under the same conditions, the second optimization is influenced by the specific solution found in the first optimization. The optimization time is under 6 s in all cases, which is an acceptable duration for practical mission execution. However, it should be noted that the size of the second optimization problem in Type I scenarios will never exceed that of the first optimization.
Comparison with state-of-the-art methods
The performance of the optimization algorithm (AACO) for planning reconnaissance operations was compared against several classical and state-of-the-art methods. These methods were selected based on their adaptability to the specific constraints and requirements of the proposed framework. Key modifications associated with this framework include the use of multiple vehicles, a modified optimization criterion, vehicle-specific movement constraints, and the capability to recharge and resume an operation.
For a fair comparison, algorithms based on ACO principles were selected:
-
Ant Colony System (ACS)16. An improved version of the original Ant System that utilizes a greedy pseudo-random state transition rule to balance exploration and exploitation. It implements global pheromone updates exclusively from the best ant to focus the search, alongside local pheromone updates during solution construction to maintain solution diversity.
-
Max-Min Ant System (MMAX)17. An ACO variant emphasizing the exploitation of the best solutions found during the search. It alternates pheromone updates between the iteration-best and global-best ants and imposes bounds on pheromone values to preserve search diversity.
-
Ant Colony Optimization with Variable Neighborhood Search (ACO-VNS)18. A hybrid algorithm combining ACO with Variable Neighborhood Search (VNS). In each iteration, the best solution generated by ACO is enhanced through VNS, which performs a steepest descent local search to further refine the solution.
-
Ant Colony Optimization with Simulated Annealing (ACO-SA)19. An integration of ACO with Simulated Annealing (SA), incorporating a mutation operator and local search procedure. While ACO forms the algorithm’s core, SA and mutation operators are selectively applied based on population diversity, with local search employed to further improve solutions.
Table 6 compares algorithm performance based on the best solutions obtained across all optimization trials. Performance is measured by the shortest operation time \(\:T\) (in seconds), or \(\:{T}^{{\prime\:}}\) for scenarios involving optimization after changes. The best solution for each scenario is highlighted in bold. The AACO algorithm outperforms all others in nearly every case, with a single exception for scenario d03 (initial optimization), where ACS and ACO-SA achieve slightly better results. However, for this scenario, AACO, ACO-SA, and ACO-VNS all converged to essentially the same solution. The last column indicates the difference (gap) between the AACO solution and the best solution from competing methods. Although AACO generally yields better results, the differences are typically small, on the order of a few seconds, implying that all algorithms considered could effectively be used for planning operations.
Table 7 presents a similar comparison, this time from the perspective of the average solutions obtained across all optimizations. AACO achieves better results in 10 out of 13 cases, ACS performs best in two cases (d03 and d06 change 1), and ACO-SA achieves the best result in one case (d06 change 2). The last column (gap) indicates the difference between the AACO results and the best-performing rival method for each scenario. The differences are typically within a few seconds, varying according to problem complexity. A particularly notable result occurs in scenario d01, where the difference exceeds 60 s. This gap corresponds to the refueling time, indicating that rival methods frequently fail to find solutions without requiring at least one refueling, whereas AACO consistently finds solutions without the need for refueling.
Wilcoxon signed-rank tests were performed to evaluate whether significant differences exist between AACO and benchmark methods at a significance level of \(\:\alpha\:=0.05\). These tests were chosen because results significantly deviated from a normal distribution, as confirmed by ShapiroWilk tests. The hypotheses were formulated as follows:
-
Null hypothesis \(\:{H}_{0}:\:{\mu\:}_{\text{AACO}}={\mu\:}_{method}\); no significant difference exists between AACO and the benchmark method.
-
Alternative hypothesis \(\:{H}_{AACO}:\:{\mu\:}_{AACO}<{\mu\:}_{method}\); AACO provides significantly better results compared to the benchmark method.
-
Alternative hypothesis \(\:{H}_{method}:\:{\mu\:}_{\text{AACO}}>{\mu\:}_{method}\); AACO provides significantly worse results compared to the benchmark method.
Table 8 summarizes the results, presenting the p-values and corresponding accepted hypotheses for each method and scenario. AACO was significantly outperformed only in two instances: by ACS in scenario d03, and by ACO-SA in scenario d06 change 2. In nine cases, there was no statistically significant difference (null hypothesis was not rejected), while AACO performed significantly better in the remaining 41 cases. Overall, these results validate the effectiveness of AACO for planning reconnaissance operations.
Figure 11 presents the optimization times (in seconds) for all scenarios and methods, which closely correspond to problem complexity as represented by the number of waypoints (black line). Some slight deviations exist (e.g., between scenarios d03 and d04), mainly caused by differences in convergence speed (see discussion below). Generally, classical algorithms (ACS and MMAS) are faster than hybrid methods incorporating local search (ACO-SA and ACO-VNS). This difference becomes particularly noticeable in more complex scenarios, such as d02. However, AACO usually achieves the shortest optimization times due to its rapid convergence, with the exception of scenario d02, where ACS and MMAS are faster. This exception occurs because AACO’s local search procedure is computationally more demanding for larger and more complex problems.

Optimization time of methods for individual scenarios.
Figure 12 compares the convergence behavior of the different methods, presenting the iteration at which the best solution was identified (averaged across all optimization trials). From this perspective, AACO clearly outperforms the other algorithms. Additionally, the figure illustrates the known problem-dependent nature of ACO-based methods. For instance, scenarios d03 and d04, despite being similar in complexity (50 vs. 56 waypoints), show notable differences due to the spatial distribution of waypoints. Scenario d03 is an area reconnaissance operation, while scenario d04 involves urban reconnaissance. These structural differences directly affect optimization times (as shown previously in Fig. 11).

Convergence of methods for individual scenarios.
To further evaluate algorithm behavior, Fig. 13 shows the average iteration times (in milliseconds), which reflects both convergence speed and overall optimization duration. Generally, AACO is comparable to the other methods. ACS and MMAS typically have shorter iteration times, mainly because they lack local search procedures within each iteration—a difference particularly evident in the most complex scenario (d02). However, in some cases (d03, d04, and d05), AACO achieves even shorter iteration times than these classical methods. This occurs due to AACO’s node clustering principle, which reduces the candidate vertex set during the transition phase. For relatively small-scale scenarios, the inclusion of local search in AACO thus has only a minor impact on iteration times.

Iteration time of methods for individual scenarios.
Validation of the pheromone matrices initialization principle
The principle of pheromone matrices initialization (PMI) integrated into AACO is validated using Type I scenarios d01, d02, and d06. In the second optimization, PMI initializes pheromone matrices using data from the previous optimization, as described in the algorithm in Fig. 10. The results obtained without PMI (denoted as − PMI) are compared to those achieved using it (denoted as + PMI).
Table 9 presents this comparison, reporting the best and average solutions \(\:{T}^{{\prime\:}}\) obtained from all optimization trials. In every case, the PMI principle yields higher-quality results. The last two columns show the area under the curve (AUC) values obtained within the first 100 iterations of the optimization. In all instances, the PMI principle produces lower AUC values, demonstrating significantly faster convergence during the initial phases of the optimization.
Wilcoxon signed-rank tests were conducted at the significance level \(\:\alpha\:=0.05\) to evaluate the statistical significance of the PMI principle. Table 10 summarizes these results, including the test statistics \(\:{W}^{+}\) and \(\:Z\). Statistical significance was confirmed only for the replanning of scenario d02. For the remaining scenarios, the null hypothesis could not be rejected; this includes cases with a relatively small number of remaining waypoints (as shown in the second column of Table 10). In these smaller instances, AACO performed consistently well, regardless of whether the PMI principle was applied. The significant difference observed in scenario d02 is attributable to its higher complexity, involving approximately 86 remaining waypoints. However, as indicated in Table 9, both the best and average solution values improved when applying the PMI principle in every scenario tested.
The faster convergence achieved with the PMI principle is illustrated in Fig. 14 using scenario d01 as an example. The blue curve represents the optimization progress without the PMI, while the green curve shows the progress when the PMI is applied. The solutions obtained in the initial iterations are significantly better with PMI. Furthermore, convergence to a value close to the final optimization result occurs notably faster—around iteration 20 with PMI, compared to approximately twice that duration without PMI.

Optimization progress with and without the PMI principle for scenario d01.
Discussion of the experiments
The results demonstrate the effectiveness of the reconnaissance model in dynamic environments across a set of scenarios reflecting typical requirements for reconnaissance units equipped with UAVs. The scenarios utilized both models to explore general areas and complex urban environments. All scenarios were situated in real geographic locations, with the model operating on actual geodata, incorporating both a digital elevation model and a database of topographic objects.
While the proposed scenarios cannot encompass all situations that may arise in real operations, such an exhaustive approach would be infeasible due to the vast number of potential variants. Instead, the scenarios were designed to cover a wide range of conditions, with the intent that similar real-world situations could be addressed by generalizing from these scenarios. Additionally, the complexity of the optimization problems, involving between 50 and 195 waypoints, was deliberately chosen to verify the algorithm’s capabilities under challenging conditions.
The results of the initial optimization across all trials are very consistent among scenarios, as the starting conditions remain the same. However, the results of the subsequent optimization after a change show more variation due to their dependence on the previous optimization’s outcome.
This situation is illustrated in Fig. 15. Figure 15a shows the best solution found in the initial optimization (\(\:T=291.47\:s\)). When the green UAV fails at time \(\:{t}^{{\prime\:}}=120\:s\), the second optimization is performed, resulting in a time to complete the operation of \(\:{T}^{{\prime\:}}=388.65\:s\), as depicted in Fig. 15b, bringing the total operation time to approximately 509 s. In contrast, Fig. 15c shows some average initial solution (\(\:T=293.94\:s\)). However, this solution leads to a significantly improved result, with \(\:{T}^{{\prime\:}}=358.44\:s\) in the second optimization, as shown in Fig. 15d. Consequently, the total operation time is reduced to less than 479 s, which is exactly 30 s faster than in the previous case. This difference is due to the varying starting conditions in the second optimizations.

Influence of initial conditions on optimization results for scenario d01.
Conclusions
This research has demonstrated a novel approach for managing dynamic changes in UAV reconnaissance operations through a unified optimization framework. We introduced and validated models tailored to handle both Type I scenarios, involving changes in the UAV swarm (e.g., UAV failures or additions), and Type II scenarios, related to modifications in the area of responsibility or associated tactical parameters. The framework was tested across six distinct, realistic scenarios, including single and combined change events, with up to two sequential disruptions within a mission.
Experimental results confirmed the robustness and adaptability of the proposed system. The AACO algorithm consistently outperforms classical and state-of-the-art methods. In 10 out of 13 scenarios, AACO achieved the best mission completion times, while maintaining optimization times under 3 s in most dynamic replanning cases. Statistical analysis using Wilcoxon signed-rank tests confirmed significant improvements in over 78% of comparisons, highlighting the superior adaptability and efficiency of our approach in timecritical dynamic environments.
While the proposed framework demonstrates strong adaptability and performance across various dynamic reconnaissance scenarios, several limitations must be acknowledged. First, the current implementation assumes reliable and continuous communication between UAVs and the ground control system, which may not always be feasible in contested or signaldegraded environments. Second, although the model supports sequential change events, it treats each replanning episode independently and does not incorporate predictive mechanisms or probabilistic forecasting of future changes, which could further enhance responsiveness. Third, in Type II scenarios, where the area of responsibility is modified, the reinitialization of waypoints may lead to partial redundancy or inefficiencies, especially when prior sensor coverage is not fully reused. Lastly, while the framework supports varied UAV parameters and mission conditions, the experimental scenarios were constrained to relatively homogeneous UAV capabilities and predefined tactical contexts.
Future work will focus on extending the current framework in two key directions. First, we aim to explore the use of heterogeneous UAV swarms, more complex terrain interactions, and the integration of online learning techniques to better anticipate and adapt to evolving mission dynamics. Second, we plan to further modify the metaheuristic ACO-based algorithm to enable the application of the Pheromone Matrix Initialization (PMI) principle in Type II scenarios, which introduces the challenge of reinitializing pheromone trails for entirely new waypoint configurations. This could be achieved by identifying structural or spatial similarities between newly deployed waypoints and those from the original mission plan. For example, geometric proximity or sensor coverage overlap could be used to map original pheromone values to similar waypoint pairs in the new configuration. This enhancement could improve convergence speed and optimization quality even when mission parameters require full redeployment of the waypoint set.
Data availability
The datasets generated and analysed during the current study are available in the Zenodo repository, https://zenodo.org/records/14808308.
References
Stodola, P. Improvement in the model of cooperative aerial reconnaissance used in the tactical decision support system. J. Defense Model. Simul. 14, 483–492. https://doi.org/10.1177/1548512917712930 (2017).
Stodola, P., Nohel, J. & Rybanský, M. Modeling a reconnaissance operation in an urban environment using a swarm of UAVs. J. Defense Model. Simul. 15485129231203706. https://doi.org/10.1177/15485129231203706 (2023).
Stodola, P. & Mazal, J. Tactical decision support system to aid commanders in their decision-making. In Modelling and Simulation for Autonomous Systems (ed Hodicky, J.) 396–406. https://doi.org/10.1007/978-3-319-47605-6_32 (Springer, 2016).
Nohel, J. & Flasar, Z. Maneuver control system CZ. In Modelling and Simulation for Autonomous Systems (eds Mazal, J. et al.) 379–388. https://doi.org/10.1007/978-3-030-43890-6_31 (Springer, 2020).
Foltin, P. et al. Discrete event simulation in future military logistics applications and aspects. In Modelling and Simulation for Autonomous Systems (ed Mazal, J.) 410–421. https://doi.org/10.1007/978-3-319-76072-8_30 (Springer, 2018).
Rada, J., Rybansky, M. & Dohnal, F. The impact of the accuracy of terrain surface data on the navigation of off-road vehicles. ISPRS Int. J. Geo-Information. 10, 106. https://doi.org/10.3390/ijgi10030106 (2021).
Xiao, J. et al. A deep reinforcement learning based distributed multi-UAV dynamic area coverage algorithm for complex environment. Neurocomputing 595, 127904. https://doi.org/10.1016/j.neucom.2024.127904 (2024).
Li, J., Xiong, Y. & She, J. UAV path planning for target coverage task in dynamic environment. IEEE Internet Things J. 10, 17734–17745. https://doi.org/10.1109/JIOT.2023.3277850 (2023).
Lu, L. et al. Fixed-wing UAV path planning in a dynamic environment via dynamic RRT algorithm. In Mechanism and Machine Science (ed Zhang, X.) 271–282. https://doi.org/10.1007/978-981-10-2875-5_23 (Springer, 2017).
Luo, Q., Tang, Q., Fu, C. & Eberhard, P. Deep-sarsa based multi-UAV path planning and obstacle avoidance in a dynamic environment. In Advances in Swarm Intelligence (eds Tan, Y. et al.) 102–111. https://doi.org/10.1007/978-3-319-93818-9_10 (Springer, 2018).
Zammit, C. & Van Kampen, E. J. Real-time 3D UAV path planning in dynamic environments with uncertainty. Unmanned Syst. 11, 203–219. https://doi.org/10.1142/S2301385023500073 (2023).
Boiteau, S. et al. Autonomous UAV navigation for target detection in visually degraded and GPS denied environments. In 2023 IEEE Aerospace Conference 1–10. https://doi.org/10.1109/AERO55745.2023.10115544 (2023).
Yang, M., Bi, W., Zhang, A. & Gao, F. A distributed task reassignment method in dynamic environment for multi-UAV system. Appl. Intell. 52, 1582–1601. https://doi.org/10.1007/s10489-021-02502-3 (2022).
Seok, J., Faied, M. & Girard, A. Unpredictably dynamic environment patrolling. Unmanned Syst. 5, 223–236. https://doi.org/10.1142/S2301385017500108 (2017).
Zhang, S. et al. Dynamic redeployment of UAV base stations in large-scale and unreliable environments. Internet Things. 24, 100985. https://doi.org/10.1016/j.iot.2023.100985 (2023).
Dorigo, M. & Gambardella, L. M. Ant colony system: a cooperative learning approach to the traveling salesman problem. IEEE Trans. Evol. Comput. 1, 53–66. https://doi.org/10.1109/4235.585892 (1997).
Stützle, T. & Hoos, H. H. MAX–MIN ant system. Future Generation Comput. Syst. 16, 889–914. https://doi.org/10.1016/S0167-739X(00)00043-1 (2000).
Jabir, E., Panicker, V. V. & Sridharan, R. Design and development of a hybrid ant colony-variable neighbourhood search algorithm for a multi-depot green vehicle routing problem. Transp. Res. Part. D: Transp. Environ. 57, 422–457. https://doi.org/10.1016/j.trd.2017.09.003 (2017).
Mohsen, A. M. Annealing ant colony optimization with mutation operator for solving TSP. Comput. Intell. Neurosci. 2016, 8932896. https://doi.org/10.1155/2016/8932896 (2016).
Lu, Y. & Da, C. Global and local path planning of robots combining ACO and dynamic window algorithm. Sci. Rep. 15, 9452. https://doi.org/10.1038/s41598-025-93571-8 (2025).
Niu, B., Wang, Y., Liu, J. & Yue, X. G. G. Path Planning for Unmanned Aerial Vehicles in Complex Environment Based on an Improved Continuous Ant Colony Optimisation. https://doi.org/10.2139/ssrn.4871459 (2024).
Chen, J. et al. Application of improved grey Wolf model in collaborative trajectory optimization of unmanned aerial vehicle swarm. Sci. Rep. 14, 17321. https://doi.org/10.1038/s41598-024-65383-9 (2024).
Stodola, P. & Nohel, J. Adaptive ant colony optimization with node clustering for the multidepot vehicle routing problem. IEEE Trans. Evol. Comput. 27, 1866–1880. https://doi.org/10.1109/TEVC.2022.3230042 (2023).
Acknowledgements
This work was supported by the Ministry of Defence of the Czech Republic as part of the project LANDOPS of University of Defence, Czech Republic (Project No: DZRO FVL22 LANDOPS).
Author information
Authors and Affiliations
Contributions
P.S. designed the methodology, prepared the experiments and wrote the main manuscript text. J.N. and L.H. conducted and evaluated the experiments. All authors reviewed the manuscript.
Corresponding author
Ethics declarations
Competing interests
The authors declare no competing interests.
Additional information
Publisher’s note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
Open Access This article is licensed under a Creative Commons Attribution-NonCommercial-NoDerivatives 4.0 International License, which permits any non-commercial use, sharing, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons licence, and indicate if you modified the licensed material. You do not have permission under this licence to share adapted material derived from this article or parts of it. The images or other third party material in this article are included in the article’s Creative Commons licence, unless indicated otherwise in a credit line to the material. If material is not included in the article’s Creative Commons licence and your intended use is not permitted by statutory regulation or exceeds the permitted use, you will need to obtain permission directly from the copyright holder. To view a copy of this licence, visit http://creativecommons.org/licenses/by-nc-nd/4.0/.
About this article

Cite this article
Stodola, P., Nohel, J. & Horák, L. Dynamic reconnaissance operations with UAV swarms: adapting to environmental changes. Sci Rep 15, 15092 (2025). https://doi.org/10.1038/s41598-025-00201-4
Received:
Accepted:
Published:
Version of record:
DOI: https://doi.org/10.1038/s41598-025-00201-4
