
Abstract
The traditional methods for over-current relay coordination (OCR) may not be adequate to ensure consistent and dependable operation of microgrid (MG), in its various operating modes. In this work, optimal TMS settings for OCRs in a microgrid model have been obtained using SCA & mod WOA. OCRs with non-standard characteristics have been used as it is less investigated in literature. The results obtained are compared with those in standard literature using GA. It is found that the total time of operation (top) of relays reduces to 5.1676 s for operating mode 1(OM1), for operating mode 2 (OM2) top value reduces to 14.8376 s and the top reduces to 13.9448 s for operating mode 3 (OM3) by using SCA as compared to the values in standard literature considered here. The top of all individual relays in all the OMs is reduced in case of SCA as compared to the standard literature. At the same time the CTI for all relay pairs is maintained greater than 0.3 s, which is essential for relay coordination. The results using mod WOA are not satisfactory as far as the reduction in top is concerned for various operating modes, though the OCR coordination is achieved. SCA & mod WOA coding in MATLAB is used to optimize time multiplying setting (TMS) for OCR coordination. The International Electrotechnical Commission (IEC) microgrid benchmark system is implemented in DIgSILENT Powerfactory 2018 software to investigate the various operating modes of microgrid.
Similar content being viewed by others

Introduction
Motivation and purpose
As the globe struggles with climate change and environmental sustainability, green energy is becoming more and more significant. Reducing carbon emissions and the negative environmental effects of traditional fossil fuels requires a switch to renewable energy sources1. Microgrids are important because they offer sustainable, dependable, and efficient local energy solutions. By combining cutting-edge control and storage technologies with renewable energy sources, microgrids allow communities to optimize energy use and lessen their dependency on centralized power grids. Microgrids are an essential part of the green energy revolution because they improve energy security and resilience in addition to helping to conserve the environment. However, because of variations in fault currents, bidirectional power flows, and changing short-circuit levels, incorporating distributed energy resources (DERs) poses challenges to current protection approaches2. Deploying distributed energy sources near the customer end has drawn a lot of interest lately3. Microgrids have been widely deployed in several nations to meet the increasing demand for dependable and secure power supplies for consumers. Critical loads like hospitals, bank servers, and sensitive defence locations are finding that microgrids are a blessing. Microgrids are increasingly demonstrating their value in today’s distribution infrastructure. Over-current relays are frequently used to secure these distribution networks since they are more cost-effective and do not require expensive communication channels4. In theory, OCR protection detects faults by using the high fault current level characteristic. The safety of microgrids in islanded mode, where fault current levels are significantly lower, is one of the most important concerns regarding their operation. Because of their current control methods, inverter-based distributed generation (IBDG) sources limit the fault current to a maximum of 2 p.u5. This problem, along with variations in the direction and amount of fault currents brought on by changes in grid configuration, renders traditional protection techniques ineffective. In order to address this issue, OCR standard characteristics must be modified to be used with different microgrid operating modes.
Overcurrent relay’s coordinated operation is essential for maintaining a dependable power system. OCR needs to be running at optimal settings in order to detect and fix a fault instance in the shortest amount of time. OCR coordination optimization is a non-linear problem. OCR’s operating time is influenced by two key settings: the Plug Setting Multiplier (PSM) and the Time Multiplier Setting (TMS). The primary relay must isolate the fault effect inside its operational zone in order to keep it localised. The backup relay must only function after a predetermined amount of time, known as the CTI, if the primary relay fails. Therefore, maintaining the CTI for a primary-backup relay pair and minimising operational time are the major goals of optimising OCR coordination.
Literature review
A review of the literature demonstrates that researchers employ a variety of optimization strategies to attain the best OCR coordination6. Initial directional OCR (DOCR) coordination strategies utilized trial and error, which resulted in high computing requirements and a low convergence rate7. Following that, relay coordination was attempted using linear optimization, with the value of the DOCR plug setting determined using previous research8. Researchers have efficiently employed non-linear approaches to optimize OCR settings9. In10, the sequential quadratic programming method was used to optimize DOCR parameters simultaneously. Since the previous decade, artificial intelligence (AI) has emerged as a cornerstone in the field of relay coordination. It outperforms standard optimization methods. AI-based methods such as particle swarm optimization11, GA12, grey wolf optimization13, TLBO14, and the Moth-Flame methodology15 have proven to be very effective for OCR coordination16. describes machine-learning-based DOCR settings in microgrids that use double inverse characteristics. The Firefly algorithm17 and modified Firefly algorithm have also been used to achieve optimal settings of OCR18. uses optimal relay coordination in ring distribution network based on hybrid optimization techniques. The water cycle algorithm has been used to solve OCR coordination problems in microgrids19.The vast majority of AI based algorithms have been applied in traditional distribution networks. However, there is still room to adopt a more effective heuristic method to microgrid protection coordination. The various optimization techniques which have been used for relay coordination as mentioned in literature survey above have been summarized in Table 1.
One solution considers the non-standard properties of OCR and incorporates an additional restriction that accounts for PSM and sets the maximum value of PSM to 2020. A similar strategy21 takes advantage of this increased value of PSM at 100. Further improvements have been proposed in22, in which non-standard characteristics are supplemented by assigning a variable to the PSM maximum value rather than leaving it as a parameter. This study uses non-standard OCR features with a PSM constraint, a topic that has been less investigated in previous research.
The fundamental goal of this research is to optimize TMS settings for better OCR coordination for microgrid protection. The study employs the SCA and mod WOA approach for coordination of over-current relays with non-standard characteristics, used in a microgrid. Efficacy of proposed algorithms is analysed by using the IEC microgird benchmark network. This study also compares the proposed approach to previously reported methods from standard literature using GA20,21 with reference to TMS values, overall operating time and CTI. The optimization is done in MATLAB 2019b and to simulate various fault scenarios DIgSILENT Powerfactory 2018 is used. Some AI based techniques which have been recently used in literature for optimization problems have also been reported in23,24,25. These techniques may further be explored for OCR coordination problem.
Contribution of the paper is as follows.
-
(a)
Study and implementation of SCA and mod WOA to IEC benchmark microgrid model for solving the OCRs coordination problem.
-
(b)
Though AI based algorithms have been applied earlier for OCR coordination but using these algorithms for coordination of OCRs with non-standard characteristics in a microgrid is less investigated in literature.
-
(c)
The population-based technique, SCA is employed to address extremely nonlinear relay-coordination problem and is found more effective than GA20,21 and applied mod WOA.
-
(d)
It is found that the total time of operation (top) of relays reduces to 5.17 s for operating mode 1(OM1), to 14.84 s for operating mode 2 (OM2) and to 13.95 s for operating mode 3 (OM3) by using SCA as compared to20,21. Reduction in total operating time implies that the fault will be isolated in minimum time, which is important feature of any sensitive and reliable protection system.
-
(e)
The top as well as the TMS values of all individual relays in all the OMs is reduced in case of SCA as compared to the standard literature20,21. At the same time the CTI for all relay pairs is maintained greater than 0.3 s, which is essential for relay coordination.
-
(f)
If we compare the results of applied mod WOA in terms of top with20,21, it is found that for OM1 overall top reduces to 5.11 s but no such reduction is seen in OM2 and OM3. In terms of TMS values and top of individual relays there is reduction only in OM1 but not in OM2 and OM3.
Hence it can be concluded that the propose SCA is efficient in solving the relay coordination problem in a microgrid for its various operating modes, as compared to mentioned standard literature20,21 and mod WOA.
The structure of this Paper is as follows. Section 2 describes the mathematical formulation of relay coordination problem and identifies the constraints used. Section 3 describes the working principles of SCA (3.1) and mod WOA (3.2) along with their respective flowcharts. Section 4 elucidates the simulation set up, results obtained and its comparison with other techniques. Section 5 sums up with conclusion and scope of future work.
Relay coordination problem: (mathematical formulation and coordination constraints)
Objective function
Plug setting multiplier (PSM) and TMS values are parameters related to OCR coordination that must be computed. The minimum fault current value and the maximum load current value determine the relay’s settings26,27. As previously stated, many heuristic optimization strategies have been employed to determine the best TMS settings for every relay.The objective function (OF) for the OCR coordination problem is the total operating time of all OCRs, which we have to minimize.
Where, m is total relays, tq, r is of qth relay operating time, rth zone fault. λq is assigned weight of qth relay operating time. Pick-up current is denoted by Ip, and fault current is denoted by Iq, for a qth relay. For instances of varying feeder lengths being same, λq = 1.
Relay characteristics
The total operating time of the relays is OF whose value depends upon the relay characteristics, as stated below:
where β determines the slope of the relay characteristic curve and P stands for PSM. For this investigation, OCR using a standard inverse curve has been taken into consideration. Values of β = 0.02, ϕ = 0.14 and N = 011.
Constraints on relay operating time
Operating time should be restricted to values between top_min and top_max for all OCRs.
Constraints on time multiplier setting
As TMS plays a significant role in OCR operating time, the following restrictions are placed on it for OCR coordination.
Where TMSqmin = 0.025 sec and TMSqmax = 1.2 s.
Bounds on PSM (nonstandard characteristics)
When calculating TMS for individual relays, the maximum PSM value should be taken into account. PSMqmax is the IEC inverse curve’s peak current level in an industrial relay prior to it entering the definite time region of its characteristics curve. The relay’s PSMqmax should therefore be limited when employing any optimization method. The PSM constraint can be described as
For standard OCR characteristic this range of PSMqmax is usually set between 1.1 and 20. For this work the value of PSMqmax is taken as 100.
Constraints on relay pickup current
The lower and upper limits of the pickup current \(\:{I}_{p}\), are shown in Eq. (8) below and are represented by the symbols \(\:{I}_{pickupmin}\) and \(\:{I}_{pickupmax}\), respectively.
Coordination criteria
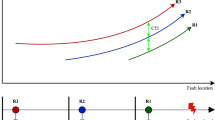
Both the primary relay and the backup relay detect faults. Prior reaching the backup relay, the primary relay detects the problem, ensuring that the system is disconnected as minimum as possible. The backup relay should be able to identify the fault after a finite amount of time (CTI) if the primary relay fails. 0.2 to 0.5 s is the range of CTI for OCR coordination. In this investigation, it has been assumed to be 0.3 s.
Optimisation techniques used
Sine cosine algorithm
SCA was initially presented in28 and is based on sinusoidal functions and co-sinusoidal functions. A random population set is generated that oscillates inwards and outwards and optimal solution is obtained utilizing a fundamental mathematical method based on sine and cosine functions. SCA incorporates a number of adaptive random variables that make optimal use of search space exploration & exploitation. A favourable region of the search space can be identified during the initial phase, since the rate of randomness of the arbitrary variables is high. After the potential zone has been explored, rate of randomness decreases and the arbitrary variable begins to fluctuate gradually, allowing for the exploitation of the promising region. After the potential zone has been explored, rate of randomness decreases and the arbitrary variable begins to fluctuate gradually, allowing for the exploitation of the promising region.
where \(\:{D}_{q}^{r}\) is the location of the target point in qth dimension for rth iteration, n1, n2, and n3 are random values, and \(\:{P}_{q}^{r}\) is the location of the current solution in qth dimension at the rth iteration. Adding a fourth variablen4, which fluctuates between 0 and 1, hence moving the search from one stage to the next.When n4 is smaller than 0.5, the present solution will lay on the sine curve whereas when n4 is more than or equal to 0.5, the current solution will stand on the cosine curve. The combined equation can be expressed as:
When the limiting values of the sine or cosine function are violated, SCA has the tremendous advantage of exploring a different search area whereas when the values fall inside the limit then the exploitation of that promising region takes place. SCA likes to use adaptive variables for quick transition from exploration to exploitation and vice versa. Here variable n1 is used to adaptively alter the range of the sine and cosine functions and is controlled by Eq. (13) as given below.
where, maximum number of iterations is N, Cis a constant and the value of present iteration is r.
In order to prevent the optimal solution from disappearing during optimization, SCA saves it in a variable as the destination point. It then updates the subsequent position in relation to the destination point as shown in Fig. 1.

Flowchart for SCA.
Modified Whale algorithm
Mirjalili created the whale optimization algorithm (WOA) in 201629 as a novel heuristic approach inspired by nature to address various mathematical optimization problems as well as engineering-related ones. This optimization method was inspired by humpback whales’ bubble net hunting strategy, which involves following a circular path to hunt small fish close to the surface. This optimization stands out from other nature-inspired optimization techniques because the process of feeding is a characteristic activity of humpback whales. WOA involves the following three steps:
Encircling prey
The humpback whales recognize and encircle the target and prey’s position. The entity closest to the ideal plan is expected to reveal the best candidate guidance currently in place, as not all whales initially exhibit the perfect technique for finding the prey in the search region. The best search agent’s characteristics are used to guide other search agents in that direction. This strategy can be represented as follows:
where q is the iteration that is currently running;\(\:{\overrightarrow{\:P}}_{\left(q\right)}^{*}\)represents the best available solution in the position vector \(\:{\overrightarrow{P}}_{\left(q\right)}^{*}\) and the coefficient vectors are \(\:\overrightarrow{E}\) and \(\:\overrightarrow{F}\). Note that each iteration will change\(\:{\overrightarrow{P}}_{\left(q\right)}^{*}\), where \(\:\overrightarrow{G}\) is the distance between the rth whale and the prey. Furthermore, the vectors \(\:\overrightarrow{E}\) and\(\:\overrightarrow{F}\) are computed as follows, using Eqs. (16) and (17), respectively:
where the value of \(\:\overrightarrow{m\:}\)is decreased from two to zero during the exploitation and exploration steps, and \(\:\overrightarrow{n}\) is an arbitrarily selected vector with a range between zero and one.
Bubble net attacking method
The hump back whales employ two techniques to model this attacking method-.
Shrinking encircling mechanism
This behaviour is caused by a decrease from two to zero in the estimation of \(\:\overrightarrow{m\:}\) through the repetitions of Eq. (15). Similarly, by reducing the value of \(\:\overrightarrow{m\:}\), a value selected at random in [− m, m], the scope of modification for \(\:\overrightarrow{E}\) is reduced. By selecting irregular attributes for \(\:\overrightarrow{E}\) in the interval [− 1, 1], the initial location of search agents is selected from among each agent’s primary location and the position of the best agent.
Spiral updating of position
This procedure establishes the distance between the prey, which is positioned at (P*, W*), and the whale, which is positioned at (P, W). From then on, a helix condition is generated between the whale and the prey locations, in order to replicate the movement of humpback whales which is spiral in shape:
Where \(\:\overrightarrow{\text{G}{\prime\:}}\)determines the location or distance of whale r to the prey and is determined as
In addition, t is an arbitrary value between [-1, 1] and s is a constant that represents the logarithmic helix’s state. Given that the humpback whales are swimming in a contracting loop around the prey and forming a helix, the equal chance of selecting the helix approach or the shrinking surrounding technique can be summed up as follows:
and u is a random number ranging between zero & one.

Flowchart for mod WOA.
Search for prey
A similar method that relies on the vector \(\:\overrightarrow{E}\)’s heterogeneity can be used, when looking for the prey (exploration). A random survey of humpback whales reveals that they may be identified and are in view of one another. Similarly, it is anticipated that a moving search agent located far from a reference whale will be proficient in the behaviour where |\(\:\overrightarrow{E}\)| > 1. Furthermore, a search agent’s status during the exploration phase is modified based on an arbitrary search agent rather than the most effective pursuit agent discovered thus far as shown in Fig. 2. In terms of mathematical equations, it can be expressed as:
Simulation setup and results
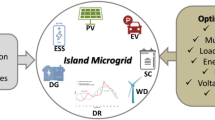
DIgSILENT Powerfactory simulation software is used to simulate a benchmark IEC microgrid model that includes several distributed generating systems. Microgrid model is depicted in Fig. 3 and its parameter details are given in30. Three operating modes are considered, as shown in Table 1. Based on the network’s maximum loading capacity, load flow calculations are used to determine each relay’s current transformer ratio and plug setting.The short circuit calculation then generates five three-phase faults on different lines to accommodate for different operating conditions. Figure 4 displays the short circuit currents on different lines in various operating modes. The three-phase faults considered are F1, F2, F3, F4 & F5, on the lines DL-5, DL-4, DL-2, and DL-1and DL-3 respectively. During all the operating modes, CB – LOOP1 is kept open.

IEC benchmark microgrid.

Three phase fault current values for various operating modes.
Coding for SCA & mod WOA algorithm is done in MATLAB software and used to obtain the optimal TMS values for all the relays. The results obtained using the proposed algorithms are compared with those reported in20,21. The current transformer ratios and the values of pick-up current, for various relays are shown in the Tables 2 and 3.
The coordination time interval (CTI) is the time difference between primary and back-up relay operating time. CTI must be greater than or equal to 0.2 s, according to IEEE standard 242 recommendations31. For this paper, CTI value considered is 0.3 s. For calculating the time of operation of various relays, IEC standard inverse characteristic is considered, with β and ϕ values of 0.02 and 0.14 respectively. The location of the 15 relays considered, numbered from 1 to 15, is shown in Fig. 3. The primary relay is depicted as (P) and the back relay is depicted as (B), during various operating modes and under different fault conditions. SCA & mod WOA algorithm is then implemented using various constraints mentioned in Sect. 3.
Operating mode 1
In operating mode 1 (OM1), all DG sources are disconnected and the microgrid is powered by the main grid as depicted in Table 2. Five different faults, F1, F2, F3, F4 and F5 are created at various locations as shown in IEC benchmark microgrid model (Fig. 3). The simulation is run in Digsilent powerfactory software and fault currents are obtained for OM1, for various relays operational in this mode (Fig. 4). SCA & WOA algorithm codes developed in Matlab software are used to find the Optimal TMS values for all the relays. Table 4 compares the results obtained with SCA and mod WOA with the ones using GA reported in20,21. It is seen that the total time of operation of all the relays in OM1, which is the objective function value shown as O.F. (s), is minimum and equal to 5.167 s in case of SCA as compared to the others. As is evident from Table 4 that the TMS values for all the relays in case of SCA has been reduced as compared to20,21 and are lesser as compared to mod WOA. Table 5 shows the operating time of each relay for each of the faults that were taken into consideration. It is seen that the operating time of each relay in case of SCA is lesser as compared to other algorithms. As seen in Fig. 5, the CTI of every primary and backup relay pair is maintained at or above 0.3s which is a necessary condition for relay coordination.
For OM1, an initial population of 30 is taken and the algorithm converges within 2000 iterations for SCA and mod WOA. Figure 6 displays the convergence characteristics for OM1 for both the algorithms implemented.

CTI of various primary backup relay pairs in OM 1.

Convergence graph for OM1.
Operating mode 2
In operating mode 2 (OM2), the microgrid is powered by all DG sources and the main grid. Once again five different faults, F1, F2, F3, F4 and F5 are created at various locations as shown in IEC benchmark microgrid model (Fig. 3) for finding the fault current values for various relays in OM2 by running the simulation in Digsilent powerfactory software (Fig. 4). SCA & WOA algorithm codes developed in Matlab software are again used to find the overall operating time (O. F. value), Optimal TMS values and operating time for all the relays for this operating mode. Table 6 compares the results for TMS values obtained with SCA and mod WOA with the ones reported in20,21. It is seen that the total time of operation of all the relays in OM2 is minimum and equal to 14.8376 s in case of SCA as compared to the others. As is evident from Table 6 that the TMS values for all the relays in case of SCA has been reduced as compared to GA20,21 and are lesser as compared to mod WOA. Table 7 shows the operating time of each relay for each of the faults that were taken into consideration. It is seen that the operating time of each relay in case of SCA is lesser as compared to other algorithms. A CTI greater than or equal to 0.3 s is maintained for all primary and back-up relay pairs as is evident from Fig. 7., thereby satisfying the necessary condition for OCR coordination.
For OM2 an initial population of 30 is taken and the algorithm converges within 3000 iterations for SCA as well as for mod WOA. Figure 8 displays the convergence characteristics for OM1 for both the algorithms implemented. The results obtained by SCA are more optimized in terms of reduction of total operating time of all relays (O.F. value), TMS values of OCRs and also as per the reduction in operating time of individual relays, as is evident from Tables 6 and 7 respectively.

CTI of various primary-backup relay pairs, in OM2.

Convergence graph for OM 2.
Operating mode 3
In operating mode 3 (OM3), the microgrid is powered by all the DG sources while the main utility grid is cut off. F1, F2, F3, F4 and F5 are the five faults considered and are created at various locations as shown in IEC benchmark microgrid model (Fig. 3). The short circuit analysis is then done to obtain the fault current values for various relays in OM3 by running the simulation in Digsilent powerfactory software (Fig. 4). The values of overall operating time (O. F. value), optimal TMS values and operating time for all the relays are obtained for this operating mode utilizing the Matlab codes developed for SCA and mod WOA. Table 8 compares the results for TMS values obtained with SCA and mod WOA with the ones using GA reported in20,21. It is seen that the total time of operation of all the relays in OM3 is minimum and equal to 13.9448 s in case of SCA as compared to the others. As is evident from Table 8 that the TMS values for all the relays in case of SCA has been reduced as compared to20,21 and are lesser as compared to mod WOA. Table 9 shows the operating time of each relay for each of the faults that were taken into consideration. It is seen that the operating time of each relay in case of SCA is lesser as compared to other algorithms. A CTI greater than or equal to 0.3 s is maintained for all primary and back-up relay pairs as is evident from Fig. 9., thereby satisfying the necessary condition for OCR coordination. The results obtained by SCA are more optimized in terms of reduction of total operating time of all relays (O.F. value), TMS values of OCRs and also as per the reduction in operating time of individual relays, as is evident from Tables 8 and 9.
For OM3, initial population for SCA is taken as 30 and the algorithm converges within 3000 iterations. For mod WOA initial population of 30 is taken and the algorithm converges within 50,000 iterations. Figure 10 displays the convergence characteristics for OM3 for both the algorithms implemented.

CTI of various primary-backup relay pairs in OM3.

Convergence graph for OM 3.

Comparison of objective function value (s).
Figure 11 compares the total operating time (objective function value) for each of the three operating modes utilizing the suggested algorithm with20,21. It is found that the total time of operation (top) of relays reduces to 5.1676 s for operating mode 1(OM1), to 14.8376 s for operating mode 2 (OM2) and to 13.9448 s for operating mode 3 (OM3) by using SCA as compared to20,21. Reduction in total operating time implies that the fault will be isolated in minimum time, which is important feature of any sensitive and reliable protection system. The top as well as the TMS values of all individual relays in all the OMs is reduced in case of SCA as compared to the standard literature20,21. At the same time the CTI for all relay pairs is maintained greater than 0.3 s, which is essential for relay coordination for all operating modes. If we compare the results of applied mod WOA in terms of top with20,21, it is found that for OM1 overall top reduces to 5.11 s but no such reduction is seen in OM2 and OM3. In terms of TMS values and top of individual relays there is reduction only in OM1 but not in OM2 and OM3.
Hence it can be concluded that the proposed SCA is efficient in solving the relay coordination problem in a microgrid for its various operating modes. But the applied mod WOA is not that effective to solve this problem of relay coordination when applied to different operating modes. SCA has also got the limitation that the total time taken by the algorithm is more as compared to mod WOA for all OMs. Till the time the total convergence time is very not high, a small change in its value doesn’t makes a big difference, as these optimized TMS settings obtained using SCA algorithm can be stored and can be chosen as per the operating mode of microgrid, for ensuring the OCR coordination.
Furthermore the statistical analysis and comparison of the applied algorithms with the standard literature considered here20,21 is summarized as follows-.
-
(i)
For SCA the reduction in the value of objective function i.e. the overall operating time of all relays when compared with20, for OM1 is 31.37%, for OM2 is 22.64% and for OM3 is 10.39%.
-
(ii)
For SCA the reduction in the value of objective function i.e. the overall operating time of all relays when compared with21, for OM1 is 22.18%, for OM2 is 15.11% and for OM3 is 10.39%.
-
(iii)
For mod WOA the reduction in the value of objective function i.e. the overall operating time of all relays when compared with20, for OM1 is 32.10%, for OM2 is 3.44% and for OM3 is − 44.87% (means increase in overall top).
-
(iv)
For mod WOA the reduction in the value of objective function i.e. the overall operating time of all relays when compared with21, for OM1 is 23%, for OM2 is -5.96% and for OM3 is -44.87% (means increase in overall top for OM2 and OM3).
Conclusion and future prospects
Newer and more intelligent protection methods are required as DG penetration increases and microgrids are introduced. OCR miscoordination may result from variations in fault current levels and direction, brought on by modifications in the microgrid’s operating mode. As the fault current values are lower in islanded mode, the OCR malfunctions. As a result, AI-based methods have become more and more common for solving relay coordination issues. Finding a proper balance between exploration and exploitation is the most challenging task in the development of any meta-heuristic algorithm due to the stochastic nature of the optimization process. The cyclic pattern of sine and cosine function allows a solution to be re-positioned around another solution. This ensures that the space between solutions is exploited. The effectiveness of SCA in solving the optimal coordination problems of OCRs is tested on IEC benchmark microgrid model. This study develops the Matlab codes using SCA & mod WOA to solve the relay coordination problem in an IEC benchmark microgrid model and attain optimal relay settings (TMS). It is found that the minimum value of overall operating time as well as the TMS settings are obtained using SCA while comparing it with GA20,21 application or mod WOA, considering non-standard characteristics of OCR. The results show the effectiveness of SCA in attaining relay coordination. Relay coordination is acheived in all operating modes of the microgrid model under consideration by maintaining a CTI of 0.3 s or more between the pairs of primary-backup relays. Hence it is recommended to use SCA for solving OCR coordination problem, in a microgrid.
The power grid will become increasingly complex in the future due to the growth of DC and AC-DC hybrid microgrids, the expansion of generator capacity, and the rising penetration of DGs. In future AI and machine learning based algorithms and some hybrid algorithms can be explored further to enhance the precision and adaptability of OCR settings. Further different non-conventional relay characteristic curves may be exploited for various operating modes of microgrid and relay setting groups can be developed. So, the scope of future work lies in developing more intelligent protection techniques for better OCR coordination, which befits and adapts to all kinds of changes in network configuration.
Data availability
The datasets used and/or analyzed during the current study available from the corresponding author on reasonable request.
References
George, T. & Selvakumar, A. I. Smart home energy management systems in India: a socio-economic commitment towards a green future. Discov Sustain. 5, 101. https://doi.org/10.1007/s43621-024-00295-2 (2024).
Hamanah, W. M., Hossain, M. I., Shafiullah, M. & Abido, M. A. AC microgrid protection schemes: A comprehensive review. IEEE Access. 11, 76842–76868 (2023).
Alhasnawi, B. N. et al. A new methodology for reducing carbon emissions using multi-renewable energy systems and artificial intelligence. Sustainable Cities Soc. 114, 105721 (2024).
Biswal, S. & Samantaray, S. Relay coordination scheme in microgrids based on non-standard tripping curve of DOCRs with multiple setting groups. IEEE Trans. Ind. Inf. 20 (4), 5737–5749. https://doi.org/10.1109/TII.2023.3334284 (2024).
Patnaik, B., Mishra, M., Bansal, R. C. & Jena, R. K. MODWT-XGBoost based smart energy solution for fault detection and classification in a smart microgrid. Appl. Energy. 285, 1169457 (2021).
Meira, R. N., de Araújo Pereira, R. L. & Brito, N. S. D. A new method for optimal coordination of overcurrent and distance relays. J. Control Autom. Electr. Syst. 34, 858–871 (2023).
Albasri, F. A., Alroomi, A. R. & Talaq, J. H. Optimal coordination of directional over current relays using biogeography-based optimization algorithms. IEEE Trans. Power Del. 30 (4), 1810–1820 (2015).
Urdaneta, A. J., Nadira, R. & Perez Jimenez, L. G. Optimal coordination of directional overcurrent relays in interconnected power systems. IEEE Trans. Power Delivery. 3 (3), 903–911 (1988).
Korde, P. N. & Bedekar, P. Optimal overcurrent relay coordination in distribution system using nonlinear programming method. International Conference on Electrical Power and Energy Systems (ICEPES) 372–376 (2016).
Birla, D., Maheshwari, R. P. & Gupta, H. O. A new nonlinear directional overcurrent relay coordination technique, and Banes and boons of near end faults based approach. IEEE Tran Power Del. 21 (3), 1176–1182 (2006).
Choudhary, P. K. & Das, D. K. Optimal coordination of over-current relay using particle swarm optimization (PSO) algorithm. IEEE Applied Signal Processing Conference (ASPCON) 308–312 (2020).
Singh, M., Panigrahi, B. K. & Abhyankar, A. R. Optimal overcurrent relay coordination in distribution system. International Conference on Energy, Automation and Signal 1–6 (2011).
Tiwari, R., Singh, R. K. & Choudhary, N. K. Coordination of dual setting overcurrent relays in microgrid with optimally determined relay characteristics for dual operating modes. Prot. Control Mod. Power Syst. 7 (6), 1–18 (2022).
Singh, M., Panigrahi, B. K. & Abhyankar, A. R. Optimal coordination of directional over-current relays using teaching Learning-Based optimization (TLBO) algorithm. Int. J. Electr. Power Energy Syst. 50, 33–41 (2013).
Korashy, A., Kamel, S., Alquthami, T. & Jurado, F. Optimal coordination of standard and non-standard direction overcurrent relays using an improved moth-flame optimization. IEEE Access. 8, 87378–87392 (2020).
Sheta, A. N., Sedhom, B. E., Pal, A., Moursi, M. S. E. & Eladl, A. Machine learning based adaptive settings of directional overcurrent relays with double-inverse characteristics for stable operation of microgrids. IEEE Trans. Industrial Inf. https://doi.org/10.1109/TII.2024.3455349 (2024).
Sulaiman, M., Muhammad, S. & Khan, A. Improved solutions for the optimal coordination of DOCRS using firefly algorithm, Complexity 2018, 7039790 (2018).
Alamshah, A. et al. Recent developments of directional overcurrent relay coordination in ring distribution network based on hybrid optimization techniques. IEEE Access. 13, 14961–14982. https://doi.org/10.1109/ACCESS.2024.3524589 (2025).
Kudkelwar, S. & Sarkar, D. An application of evaporation-rate-based water cycle algorithm for coordination of over-current relays in microgrid. Sādhanā 45, 237. https://doi.org/10.1007/s12046-020-01476-1 (2020).
Saad, S. M. & El-Naily Nand Mohamed, F. A. A new constraint considering maximum PSM of industrial overcurrent relays to enhance the performance of the optimization techniques for microgrid protection schemes. Sustain. Cities Soc. 44, 445–457 (2019).
El-Naily, N., Saad, S. M. & Hussein Tand Mohamed, F. A. A novel constraint and non-standard characteristics for optimal overcurrent relays coordination to enhance microgrid protection scheme. IET Gener Transm Distrib. 13, 780–793 (2019).
Saldarriaga-Zuluaga, S. D., López-Lezama, J. M. & Muñoz-Galeano, N. Optimal coordination of overcurrent relays in microgrids considering a non-standard characteristic. Energies 13 (4), 922 (2020).
Alhasnawi, B. N., Zanker, M. & Bureš, V. A smart electricity markets for a decarbonized microgrid system. Electr. Eng. https://doi.org/10.1007/s00202-024-02699-9 (2024).
Alhasnawi, B. N. et al. A multi-objective improved cockroach swarm algorithm approach for apartment energy management systems. Information 14 (10), 521. https://doi.org/10.3390/info14100521 (2023).
Alhasnawi, B. N. et al. A novel approach to achieve MPPT for photovoltaic system based SCADA. Energies 15 (22), 8480. https://doi.org/10.3390/en15228480 (2022).
Urdaneta, A. J., Ramon, N. & Jimenez, L. G. P. Optimal coordination of directional relays in interconnected power system. IEEE Trans. Power Deliv. 3(3), 903–911 (2013).
Birla, D., Maheshwari, R. P. & Gupta, H. O. Time overcurrent relay coordination: A review. Int. J. Emerg. Elect. Power Syst 2(2), 1039 (2005).
Mirjalili, S. SCA: a sine cosine algorithm for solving optimization problems. Knowl. -Based Syst. 96, 120–133 (2016).
Mirjalili, S. & Lewis, A. The Whale optimization algorithm. Adv. Eng. Softw. Neurocomputing. 95, 51–67 (2016).
Kar, S., Samantaray, S. R. & Zadeh, M. D. Data mining model based intelligent differential microgrid protection scheme. IEEE Syst. J. 11, 1161–1169 (2017).
IEEE. IEEE recommended practice for protection and coordination of industrial and commercial power systems. IEEE Buff Book. (2001).
Author information
Authors and Affiliations
Contributions
Ekta Gairola: Data curation, Conceptualization, Investigation, validation and Writing of the original draft.Mahiraj Singh Rawat: Visualization, Data curation, Supervision, Formal analysis, Validation.Dr. Padmanabh Thakur: Conceptualization, Visualization, Data curation.Dr. Sandeep Gupta: Data curation, Formal analysis, Validation.Dr. Mukesh Kumar: Data curation, Formal analysis.
Corresponding authors
Ethics declarations
Competing interests
The authors declare no competing interests.
Additional information
Publisher’s note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
Open Access This article is licensed under a Creative Commons Attribution-NonCommercial-NoDerivatives 4.0 International License, which permits any non-commercial use, sharing, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons licence, and indicate if you modified the licensed material. You do not have permission under this licence to share adapted material derived from this article or parts of it. The images or other third party material in this article are included in the article’s Creative Commons licence, unless indicated otherwise in a credit line to the material. If material is not included in the article’s Creative Commons licence and your intended use is not permitted by statutory regulation or exceeds the permitted use, you will need to obtain permission directly from the copyright holder. To view a copy of this licence, visit http://creativecommons.org/licenses/by-nc-nd/4.0/.
About this article

Cite this article
Gairola, E., Rawat, M.S., Thakur, P. et al. Comparative study of heuristic algorithms for coordination of industrial over current relays with nonstandard characteristics in microgrid protection. Sci Rep 15, 16020 (2025). https://doi.org/10.1038/s41598-025-01077-0
Received:
Accepted:
Published:
Version of record:
DOI: https://doi.org/10.1038/s41598-025-01077-0
Keywords
This article is cited by
-
A creative approach for the protection coordination of microgrids considering parallel events via the pyramidal grouping technique
Scientific Reports (2025)
-
Performance evaluation of advanced metaheuristic algorithms for directional overcurrent relay coordination in distribution networks
Scientific Reports (2025)
