
Abstract
In the field of bearing fault diagnosis, the phenomenon of stochastic resonance (SR) has been proven to effectively utilize noise to enhance weak features of early faults. The classical bistable stochastic resonance (CBSR) model, as one of the most widely applied SR methods, faces limitations in feature enhancement due to the complexity of parameter tuning and the issue of output saturation. To address these issues, this paper proposes an improved piecewise unsaturated bistable stochastic resonance (PUBSR) method, which employs an asymmetric potential function to effectively mitigate the output saturation problem of CBSR. Additionally, the cuckoo search (CS) algorithm is used to optimize the potential function parameters, enhancing fault diagnosis performance. Finally, the proposed method is applied to both simulated signals and early bearing fault engineering data. The results demonstrate that compared to the CBSR method, the proposed approach more than doubles the spectral peak value when extracting characteristic frequencies, significantly improving the identifiability of fault features and diagnostic accuracy.
Similar content being viewed by others


Introduction
Bearings are critical components in rotating machinery, and their health status is vital for the stability of the entire production system1,2. However, in the early stages of bearing faults, the fault characteristics are often very subtle3,4,5. If effective diagnosis is not conducted promptly, it can lead to severe equipment failures or even accidents. Traditional signal processing methods, such as wavelet decomposition, empirical mode decomposition, and spectral kurtosis, primarily focus on eliminating noise to extract fault features6,7,8,9,10,11. While these methods effectively suppress noise, they can inadvertently diminish the fault signal characteristics. In contrast, stochastic resonance (SR) methods leverage noise within the signal to enhance weak fault features, thereby improving the timeliness of fault diagnosis12,13.
The concept of SR was initially introduced by Benzi et al. while studying periodic recurrence phenomena in paleoclimates14. Traditional SR methods are constrained by the adiabatic approximation theory, which requires input signal frequencies to be much less than 1 Hz. However, actual engineering applications often do not meet this criterion15,16. To address this limitation, researchers have developed various novel SR methods, such as variable-scale stochastic resonance, multi-scale noise modulation, frequency-shifted variable-scale stochastic resonance, and modulated stochastic resonance, significantly broadening their application range17,18,19,20,21,22. The classical bistable stochastic resonance (CBSR), one of the most widely used SR methods, has been employed by many scholars for early bearing fault diagnosis23,24. For instance, Li et al.22. proposed a noise-controlled second-order enhanced CBSR method based on Morlet wavelet transform to extract weak fault features from wind turbine vibration signals. Lei et al.25. combined ant colony optimization with CBSR to adaptively match the optimal SR model to input signals for rolling bearing vibration analysis. Additionally, Shi et al.26. introduced a piecewise adaptive multi-parameter bistable stochastic resonance method for extracting early fault features. This approach optimizes key parameters using a Cuckoo Search algorithm, allowing independent adjustment of barrier height, potential well distance, and aperture size, thereby enriching the potential function structure. This method has been successfully applied in early bearing fault diagnosis.
With the deepening of research on the CBSR method, many scholars have found that this method experiences saturation when processing certain complex signals27,28. To overcome this issue, several solutions have been proposed in existing studies. For example, Shi et al.29. proposed a piecewise nonlinear stochastic resonance method with single-parameter adjustment, which not only improves the theoretical output signal-to-noise ratio but also effectively detects weak signals in strong background noise. Lei et al.30. proposed an adaptive non-saturated bistable stochastic resonance model, which avoids output saturation by establishing a piecewise bistable potential model. However, the potential function of this model is fully symmetric, which may not be suitable for handling asymmetric or skewed signals that occur in practical applications. To address this, Li et al.31. proposed a piecewise nonlinear asymmetric bistable stochastic resonance model, which partially resolves the saturation phenomenon in CBSR. However, this method does not optimize the system parameters, and thus its adaptability and stability in engineering practice need further improvement.
To overcome the limitations of the CBSR method, this study proposes an improved piecewise unsaturated bistable stochastic resonance (PUBSR) approach. This method constructs a piecewise bistable potential function to prevent output saturation and employs the Cuckoo Search algorithm to optimize system parameters. The PUBSR method was applied to data analysis from both full-life bearing tests and mild fault bearing tests. The results demonstrate that this approach effectively extracts weak fault features, enabling accurate diagnosis.
The structure of this paper is as follows: Sect. 2 introduces the basic theory of bistable stochastic resonance systems and their saturation phenomena; Sect. 3 develops the PUBSR model and theoretically derives the SNR; Sect. 4 verifies the signal feature extraction capability of PUBSR using simulation signals; Sect. 5 validates the effectiveness of the method through public datasets and bearing experiments; finally, the conclusions are presented in Sect. 6.
Classical bistable stochastic resonance algorithm
CBSR algorithm principle
The CBSR algorithm is a key method for studying the impact of stochastic noise on the dynamic behavior of nonlinear systems, commonly used to enhance weak signals in noisy environments. In the CBSR algorithm, particles within the system are driven by both periodic forces and random forces. When the periodic force interacts with the stochastic noise, the system’s state can switch between the two potential wells, amplifying the periodic signal. This dynamic behavior can be described using the Langevin Eqs32,33:
In this context, \(x\) represents the particle’s mass, \(x\) denotes the particle’s position, and \(F(t)\) is the random force generated by the particle’s irregular motion, which can be considered as stochastic noise. The term \(\lambda \dot {x}\) represents the viscous damping force acting on the particle during its motion, where \(\lambda\) is the damping coefficient.
By dividing both sides of Eq. (1) by the particle’s mass m, the Langevin equation can be expressed as:
In this context,\(f(x)= - \dot {U}(x)\),\(U(x)= - {{a{x^2}} \mathord{\left/ {\vphantom {{a{x^2}} 2}} \right. \kern-0pt} 2}+{{b{x^4}} \mathord{\left/ {\vphantom {{b{x^4}} 4}} \right. \kern-0pt} 4}\) is the potential function of the CBSR system.
When a weak periodic signal s(t) is introduced, Eq. (3) can be modified to:
By replacing the Langevin force with Gaussian noise\(N(t)\)and incorporating the weak periodic signal s(t) into the equation, the classical overdamped bistable stochastic resonance system can be expressed as:
In this context, A represents the amplitude of the weak periodic signal, \(f\) is the frequency, and \(\phi\) is the initial phase. The parameters a and b are the structural parameters of the system. The Gaussian white noise N(t) satisfies the following conditions:
As shown in Fig. 1, when a>0 and b>0, the CBSR system has two stable points, which correspond to the two minimum points of the potential curve. Between these two stable points, there exists an unstable point at \(x\)=0, located at the local maximum of the curve, commonly referred to as the potential barrier. The height of this barrier represents the energy threshold that a particle must overcome to transition from one stable point to the other.

CBSR potential curve (a = 1, b =1).
Figure 2 illustrates the motion of a particle within the potential well during the stochastic resonance phenomenon. Initially, in the absence of an external driving force and when the noise intensity is insufficient to induce particle transitions, the particle remains in its initial stable state, oscillating locally around the stable point of the potential well. As the system reaches an appropriate noise level and is influenced by an external periodic driving force, the structure of the CBSR’s nonlinear potential function changes, causing the height of the potential barrier to vary periodically with the phase of the periodic signal. This can be interpreted as the particle absorbing a portion of the energy from the noise, allowing it to gain enough energy to cross the barrier, thus enabling orderly transitions between the two stable points. This phenomenon is known as stochastic resonance34.

Schematic diagram of particle transitions between bistable state traps.
The output saturation phenomenon of CBSR
Research has shown that the CBSR algorithm has an inherent drawback of output saturation, which limits its ability to enhance the amplitude of weak target signals. The signal-to-noise ratio (SNR) is the most commonly used metric to evaluate the performance of stochastic resonance algorithms. Under the conditions that satisfy the adiabatic approximation theory, the expression for the output SNR of the CBSR algorithm is given as follows26,35:
In this expression,R represents the Kramers escape rate, A is the amplitude of the signal, and D denotes the noise intensity.
Figure 3 illustrates the relationship between the output SNR of the CBSR algorithm and the variations in its four parameters. As shown in Fig. 3a, b, the SNR initially increases to a peak and then decreases as the parameters a and b increase, indicating the existence of optimal values for a and b that maximize the system’s SNR. Figure 3c demonstrates that, when a, b, and D are fixed, the SNR generally increases with the amplitude A of the input signal. This trend suggests that stronger signals are more easily detectable against the background noise, enhancing the system’s performance. Figure 3d shows the specific impact of noise intensity D on the output SNR. At low noise levels, the SNR significantly improves as D increases, exhibiting the phenomenon of stochastic resonance. However, when D becomes too high, the SNR begins to decline, indicating that the CBSR system has entered an over-resonance state and experienced saturation.

The relationship between the output SNR of CBSR system and the change of parameters: (a) the influence of system parametera on SNR; (b) The effect of system parameter b on SNR; (c) The influence of input signal amplitude A on SNR; (d) The influence of noise intensity D on SNR.
Furthermore, the output saturation characteristic of CBSR can be further explained by analyzing its potential function curve. As illustrated in Fig. 4, when\(\left| x \right|>1\), the absolute value of the slope of the potential function (\(dU(x)/dx= - ax+b{x^3}\)) increases rapidly, creating steep potential well walls. This results in a relatively weak influence on the output signal \(x\) when the potential energy increases, as seen in the small changes between \({x_1}\), \({x_2}\)and \({x_3}\) in (Fig. 4). The presence of the higher-order term \({{b{x^4}} \mathord{\left/ {\vphantom {{b{x^4}} 4}} \right. \kern-0pt} 4}\) in the potential function limits the amplitude of the output signal in the CBSR algorithm, thereby constraining its ability to enhance the signal effectively.

CBSR potential curve (A = 1, b =1).
Improved bistable stochastic resonance system
Based on the above analysis, it is evident that the higher-order terms in the nonlinear potential function are critical to determining the saturation threshold. To address this issue, adjusting the slope of the CBSR potential function can help avoid this limitation. Therefore, this paper introduces a piecewise unsaturated bistable stochastic resonance algorithm. The expression for this algorithm is given as:
Where,\(a>0\),\(b>0\),\(c>\sqrt {{a \mathord{\left/ {\vphantom {a b}} \right. \kern-0pt} b}}\),parameters a, b, c are constants.
The potential function of the PUBSR algorithm consists of three distinct segments. The first segment involves a linear modification to the left barrier wall of the CBSR potential, intersecting with the function \(U(x)\) at\(x= - \sqrt {a/b}\). The second segment remains consistent with the CBSR potential function, retaining the same potential well location and depth. The third segment adjusts the right barrier wall of the CBSR by decreasing its slope, making the barrier wall more gradual. As illustrated in Fig. 5, when the system parameters are fixed at (a = 1, b = 1, c=\(\:\sqrt{2a/b}\)), the PUBSR potential function is consistently wider than that of the CBSR. This broader potential well indicates that, at the same output signal amplitude, the particle requires less energy to move, which helps to overcome the saturation phenomenon.

Potential curves of CBSR and PUBSR algorithms.
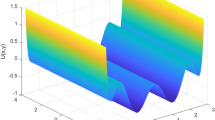
Figure 6a illustrates the impact of parameter a on the PUBSR potential function, with fixed values of (b = 1, c = \(\:\sqrt{2a/b}\)). As the value of a increases, both the depth and width of the potential well increase, leading to a higher potential barrier. In contrast, Fig. 6b shows the effect of parameter b on the potential function, with (a = 1, c = \(\:\sqrt{2a/b}\)) The influence of parameter b on the potential function is the opposite of that of parameter a, resulting in changes that decrease the depth and width of the potential well as b increases.

Influence of parameters (a) and (b) on the shape of PUBSR potential function.
As is well known, the Kramers escape rate of a classical bistable system can be expressed as36:
By substituting Eq. (7) into Eq. (8), the Kramers escape rate of the PUBSR can be obtained as:
By substituting Eqs. (9) and (10) into Eq. (6), the theoretical calculation formula obtained is as follows:
Figure 7 presents a comparison of the output signal-to-noise ratio (SNR) between the CBSR and PUBSR systems under the conditions\(A=0.3\),\(D=0.5\), and a specific value of\(c=\sqrt {2a/b}\). The results indicate that, with the same parameter configuration, the PUBSR achieves a significantly higher SNR compared to the CBSR, effectively mitigating the saturation issue observed in the CBSR. Additionally, it is evident that these parameters have a considerable impact on the output SNR, highlighting that the performance of the PUBSR algorithm in practical applications depends heavily on the appropriate tuning of these parameters.

The influence of PUBSR and CBSR system parameters on SNR: (a) The relationship between left segment SNR and parameter a; (b) Relationship between left SNR and parameter b; (c) Relationship between SNR in the right paragraph and parameter a; (d) Relationship between SNR in the right segment and parameter b.
When using SR methods to detect weak signals, it is crucial to satisfy the adiabatic approximation conditions, which require the input signal amplitude \(A \ll 1\) and noise intensity \(D \ll 1\). However, in practical engineering applications, these conditions are often difficult to achieve, limiting the direct application of SR algorithms in bearing fault diagnosis. To address this issue, researchers have developed various strategies to adjust and optimize SR algorithms, such as resampling and variable-scale stochastic resonance. These methods adapt the signal’s time scale or introduce nonlinear dynamic characteristics to meet the adiabatic approximation conditions, thereby making them more suitable for real-world engineering scenarios. Compared to other techniques, variable-scale stochastic resonance is relatively simple to implement, requiring no complex numerical computations, and can optimize the stochastic resonance conditions without altering the system’s physical properties. Therefore, this study adopts the variable-scale stochastic resonance method to optimize the system, enhancing the accuracy and efficiency of fault diagnosis.
Taking the CBSR algorithm as an example, we perform a linear transformation on the time scale, defining \(y(\tau )=x(t)\) and \(\tau =pt\). Substituting these into Eq. (4) results in the following expression:
Divide the left and right sides of the formula by p to get:
Variable-scale stochastic resonance achieves stochastic resonance over a wider range of signal amplitudes and noise intensities by selecting an appropriate scale transformation value, P, to satisfy the adiabatic approximation conditions. This adjustment extends the applicability of stochastic resonance theory in real-world scenarios, significantly enhancing the accuracy of fault diagnosis.
Simulation signal analysis
To verify the effectiveness of the proposed method in detecting weak signals, a simulated signal was constructed. This signal consists of a low-amplitude sinusoidal periodic component combined with a noise signal. The periodic signal has a frequency of \(f=0.01\)Hz, with a total of \(N=10,000\) sampling points and a sampling frequency of \({f_s}=10\)Hz. The time-domain waveform and spectrum analysis of the simulated signal are shown in (Fig. 8).

Simulation signal: (a) time domain waveform and spectrum of small parameter sinusoidal periodic signal; (b) Time domain waveform and spectrum of simulated signal.
Figure 9 shows the results of processing the simulated signal using both the CBSR and PUBSR systems. In the time-domain waveforms of the output signals from both methods, a clear stochastic resonance phenomenon is observed, with the signal amplitude range expanding to more than five times that of the original signal. Comparatively, the PUBSR output signal more accurately reproduces the periodic waveform characteristics of the sinusoidal low-amplitude signal, with a smoother signal curve.
From the frequency spectrum of the output signals, both CBSR and PUBSR successfully detect the weak target signal, as indicated by the primary spectral peak aligning with the target frequency. Notably, the frequency peak of the PUBSR output signal increased by 5.5 times compared to the original signal, and by 1.4 times compared to the CBSR algorithm. These results demonstrate the significant advantage of the PUBSR algorithm in extracting weak signal features.

The simulation signal processing results of CBSR and PUBSR systems are as follows: (a) CBSR output signal time domain waveform and spectrum (\(a=1\), \(b=1\)); (b) PUBSR output signal time-domain waveform and its spectrum (\(a=1\), \(b=1\), \(c=\sqrt {2a/b}\)).
Early fault diagnosis method of rolling bearing based on PUBSR
PUBSR model parameter optimization
Section 2 demonstrates that the performance of the PUBSR algorithm depends on its key parameters, a and b. To optimize these system parameters, this study integrates the cuckoo search (CS) algorithm with the proposed PUBSR system. The CS algorithm is a bio-inspired swarm intelligence optimization technique that mimics the brood parasitism behavior of cuckoos, primarily using their reproduction strategy and the Lévy flight mechanism to search for optimal solutions. The algorithm operates based on the following rules:
-
1.
Each cuckoo lays only one egg at a time and places it in a randomly chosen nest.
-
2.
The best nest with the highest quality of eggs (solutions) is carried over to the next generation.
-
3.
The number of host bird nests is fixed, and the probability of detecting foreign bird eggs is \({p_a} \in \left[ {0,1} \right]\). Once detected, the host bird can either remove the foreign egg or rebuild the nest.
In the CS algorithm, each nest represents a solution, and the main idea is to replace poorer solutions with new or potentially better ones. The method comprises two parts: global random search and local random search. The global random search, based on Lévy flights, is described by the following formula:
In this context, \({\varvec{x}}_{i}^{j}\)represents the \(j\)-th solution in the i-th generation, and n is the step-size control vector used to adjust the size of the Lévy flight jumps. The operator \(\otimes\) denotes the multiplication operation, and \(\operatorname{Levy} {\text{(}}\beta {\text{)}}\)refers to the random search path that follows a Lévy probability distribution:
In the local search phase, if a solution is identified as suboptimal (determined by the discovery probability \({p_a}\)), its position will be updated by a perturbation toward a neighboring nest position. The update rule is given by:
Where, \({\varvec{x}}_{m}^{j}\) and \({\varvec{x}}_{n}^{j}\) randomly select the two nest locations, and \(r \in \left[ {0,1} \right]\) is a uniformly distributed random number.
The entire optimization process involves initializing a population of random solutions, evaluating their fitness, and retaining the best solutions. At each iteration, the algorithm alternates between global and local search using Eqs. (18) and (20) to update solutions. This iterative process continues until a predefined stopping criterion is met, at which point the algorithm outputs the optimal solution and its associated parameters.
In this study, the fitness function of the CS algorithm is defined as the Signal-to-Noise Ratio (SNR) of the output signal from the stochastic resonance system. The optimization goal is to maximize the output signal’s SNR, thereby identifying the optimal system parameters37. The definition of SNR is as follows:
Where, \({A_d}\)represents the amplitude of fault characteristic frequency \({f_d}\) in the output power spectrum, \({A_i}\) represents the amplitude of the i-th frequency component in the output power spectrum, \(\sum\nolimits_{{i=1}}^{{N/2}} {{A_i} - {A_d}}\)represents the sum of noise power amplitudes in the output power spectrum, and N is the length of the signal.
In the process of parameter optimization, the CS algorithm requires a series of computational operations. The main sources of computational load include population initialization, fitness evaluation, Lévy flight operation, and the solution update process. Population initialization involves generating and evaluating initial solutions, while fitness evaluation requires calculating the objective function for each solution. The Lévy flight operation entails complex mathematical computations, especially in high-dimensional spaces, where the calculation of step size and direction further increases the computational burden. Moreover, the number of iterations in the algorithm determines the scale of computation, with more iterations significantly increasing the computational demands.
CS-PUBSR fault diagnosis process
-
1.
Signal preprocessing: To apply the SR method, it is necessary to meet the adiabatic approximation conditions. Therefore, this study employs variable-scale stochastic resonance to fulfill these conditions by selecting an appropriate scale transformation value to ensure the signal meets the required standards38.
-
2.
Parameter optimization: The CS algorithm is used to adaptively select and optimize the parameters of the PUBSR model. Based on multiple experimental results from the algorithm developers, it was found that when the parameter value is approximately 0.25 and the population size is 15, the convergence speed is less sensitive to parameter selection. Therefore, this study sets this parameter to the default value39.
-
3.
Fault feature extraction and diagnosis: Based on the optimized parameters mentioned above, the PUBSR model is configured. Subsequently, the scale-transformed fault signals are input into the optimized PUBSR model. Finally, fault features are extracted from the processed output signals to achieve early fault diagnosis of bearings.
Case 1: bearing life data set
This study utilizes the XJTU-SY bearing full-life dataset, published by Xi’an Jiaotong University, to validate the feasibility of the proposed fault diagnosis method. To assess the effectiveness of PUBSR in early bearing fault diagnosis, the first 10% of the data from this dataset was selected and processed in chronological order. This dataset is widely used in the fields of bearing health monitoring, fault diagnosis, and life prediction.
The experimental platform consists of an AC motor, a speed controller, a rotating shaft, and a hydraulic loading system (as shown in Fig. 10). The bearings used in the experiment are LDK UER204 rolling bearings, with specific parameters detailed in (Table 1). The experiment employs an intermittent sampling method with a sampling frequency of 25.6 kHz, sampling every 1 min, and each sampling session lasting for 1.28 s.

Bearing accelerated life test bench.
XJTU-SY inner ring fault
The detailed information on the inner ring fault data can be found in (Table 2). When the bearing reached the 22nd minute of operation (5.9% of its full life). In the original signal (Fig. 11a), the characteristic frequency components associated with the fault are almost entirely buried in the background noise, with no discernible fault-related peaks in the envelope spectrum. After setting the transformation scale to a=12,800 and optimizing the parameters using the CS algorithm, the CBSR system parameters were found to be b=0.3394, =0.2953, while the PUBSR system parameters were optimized to a=0.0021, b=0.4429, and c=0.9850.
After processing with the CBSR system (Fig. 11b), the periodic impact component at the fault characteristic frequency and its harmonics become partially observable, yet remain of relatively low amplitude and are still subject to spectral interference. In contrast, the output of the proposed PUBSR system (Fig. 11c) exhibits a significant enhancement of the fault-related features. Both the fundamental fault frequency and its harmonics are clearly distinguishable, accompanied by a marked increase in the signal-to-noise ratio. These results validate the superior capability of the PUBSR model in enhancing weak fault information under strong noise conditions.

The processing results of the inner ring fault signal are as follows: (a) the time domain waveform and envelope spectrum of the original signal; (b) time domain waveform and envelope spectrum of output signal of CBSR system; (c) Time domain waveform and envelope spectrum of PUBSR system output signal.
XJTU-SY outer ring fault
The detailed information on the outer ring fault data can be found in (Table 3).When the bearing reached the 8th minute of operation (6.5% of its full life), the time-domain waveform of the outer ring fault signal and its envelope spectrum are shown in (Fig. 12a). Due to significant background noise, the fault characteristic frequency is not clearly visible in the spectrum.
After setting the transformation scale to p=12,800 and optimizing the parameters using the CS algorithm, the CBSR system parameters were determined to be a=0.0035, b=0.4983, while the PUBSR system parameters were optimized to a=0.0917, b=0.4903, and c=0.0124.
Figure 12b shows the time-domain waveform and envelope spectrum of the output signal from the CBSR model. A prominent peak is observed at the fault characteristic frequency, but there are also large peaks at other interference frequencies. In contrast, Fig. 12c displays the results after processing with the PUBSR model. Compared to CBSR, the envelope spectrum of PUBSR shows two main frequency components: 34.38 and 108.14 Hz. The 34.38 Hz component corresponds to the bearing’s rotational frequency with an error rate of 1.7%, while the 108.14 Hz component accurately reflects the outer ring fault characteristic frequency, with a reduced error rate of 0.2%.

The processing results of the fault signal of the bearing outer ring are as follows: (a) the time domain waveform and envelope spectrum of the original signal; (b) time domain waveform and envelope spectrum of output signal of CBSR system; (c) Time domain waveform and envelope spectrum of PUBSR system output signal.
Case 2: bearing life data set
To further validate the effectiveness of the proposed method, this study conducted bearing fault detection using a rotating machinery fault simulation test bench. The test bench consists of a three-phase asynchronous motor, a variable frequency drive, and a fault-bearing kit, as shown in (Fig. 13). In response to the need for diagnosing early faults, a mild bearing fault kit was selected, with relevant parameters detailed in (Table 4).
During the experiment, the motor output speed was set to 1200 rpm, and the magnetic brake was in a no-load state. Signal acquisition was carried out by attaching a piezoelectric accelerometer to the bearing housing. The data acquisition sampling frequency was set to 12 kHz, with each sampling session lasting for 1 min.

SQI rotating machinery fault simulation test bench: (a) test bench structure; (b) Bearing failure kit.
Inner ring fault
Figure 14a presents the time-domain waveform and envelope spectrum of the inner ring fault signal. In the time-domain waveform, periodic transient impact signals are not clearly visible, and the characteristic frequency of the inner ring fault has a very low amplitude in the envelope spectrum, almost masked by noise. After setting the transformation scale to p=6000 and optimizing the parameters using the CS algorithm, the CBSR system parameters were determined to be a=0.0054, b=0.4936, while the PUBSR system parameters were optimized to a=0.0023, b=0.4235, and c=0.8458.
Figures 14b, c show the processing results of the inner ring fault signal using the CBSR and PUBSR algorithms, respectively. After processing, the envelope spectrum reveals that the rotational frequency, fault characteristic frequency, and their harmonics dominate. Notably, after applying the PUBSR method, the amplitude at the fault characteristic frequency significantly increases, while the amplitude of the interference frequencies decreases, indicating enhanced signal detection and fault diagnosis capability.

Processing results of the inner ring fault signal: (a) Time-domain waveform and envelope spectrum of the original signal; (b) Time-domain waveform and envelope spectrum of the CBSR system output signal; (c) Time-domain waveform and envelope spectrum of the PUBSR system output signal.
To evaluate the computational complexity of the PUBSR method, a comparative analysis was conducted on its performance against the CBSR method in diagnosing inner ring faults of bearings. Table 5 summarizes key indicators such as execution time, memory consumption, floating-point operations (MFLOPs), and model parameters. As shown in the table, although PUBSR exhibits increased computational complexity, its potential improvements in fault diagnosis performance justify this trade-off.
Outer ring fault
Figure 15a presents the time-domain waveform and envelope spectrum of the outer ring fault signal. Figure 15b shows the results of the CBSR method, where noise in the time-domain signal is somewhat reduced, and the characteristic fault frequency and its harmonics appear in the frequency spectrum. Figure 15c presents the diagnostic results using the PUBSR method. Compared to the CBSR method, the PUBSR method further reduces noise interference and significantly improves the clarity of the signal in the frequency domain. The peak at the fault characteristic frequency is 1.58 times higher in the PUBSR output than in the CBSR output. Table 6 presents a comparison of computational complexity between the CBSR and PUBSR methods.
Thus, the PUBSR method demonstrates a more effective ability to identify weak fault characteristics in real bearing fault signals, enhancing the accuracy and reliability of early bearing fault diagnosis. (Transformation scale p=6000, CBSR system parameters: a=0.026, b=0.4361; PUBSR system parameters: a=0.0602, b=0.4561, c=0.2697).

The processing results of the outer ring fault signal are as follows: (a) the time domain waveform and envelope spectrum of the original signal; (b) time domain waveform and envelope spectrum of output signal of CBSR system; (c) Time domain waveform and envelope spectrum of PUBSR system output signal.
Conclusion
In this paper, a novel stochastic resonance algorithm is proposed to address the output saturation issue of traditional bistable stochastic resonance (CBSR) methods and the difficulty of detecting weak signals, with a focus on early bearing fault diagnosis. The main conclusions are summarized as follows:
-
1.
Addressing the output saturation of the CBSR model: A piecewise unsaturated stochastic resonance method was proposed to tackle the output saturation issue. The left barrier wall was linearized, and the slope of the right barrier wall was reduced to prevent saturation. Simulation experiments demonstrated that this method has superior capabilities in enhancing weak signal features.
-
2.
Optimization using variable-scale stochastic resonance: The proposed model was optimized using variable-scale stochastic resonance, which adjusts the time scale of the signal to meet adiabatic approximation conditions. This approach offers a simple computational solution for practical engineering applications without altering the system’s physical properties. Additionally, the signal-to-noise ratio (SNR) was used as the objective function, and the Cuckoo Search (CS) algorithm was employed to optimize the key parameters of the PUBSR model for optimal output signals.
-
3.
Validation with engineering data: The proposed CS-PUBSR method was validated using engineering data, and the results showed that it effectively removes high-frequency components, resulting in a clearer frequency domain. Furthermore, the extracted fault characteristic frequency peaks were higher, confirming the method’s effectiveness in early bearing fault diagnosis.
Although the proposed method has demonstrated strong enhancement capability and diagnostic performance in early bearing fault diagnosis, several aspects remain to be further explored. First, the current approach is primarily designed for single-fault scenarios and does not consider the signal superposition and feature interference that may arise under compound fault conditions. In future work, we plan to conduct compound fault signal modeling and simulation experiments, and validate the method’s identification accuracy using real industrial datasets. In terms of computational efficiency, we will assess the feasibility of deploying the method on embedded systems and attempt to enhance its real-time performance and engineering applicability by simplifying the model structure or parameter search mechanism.
Data availability
The datasets used and/or analysed during the current study available from the corresponding author on reasonable request.
References
Su, H., Xiang, L., Hu, A., Xu, Y. & Yang, X. A novel method based on meta-learning for bearing fault diagnosis with small sample learning under different working conditions. Mech. Syst. Signal. Proc. 169, 108765 (2022).
Liu, Z. & Zhang, L. A review of failure modes, condition monitoring and fault diagnosis methods for large-scale wind turbine bearings. Measurement 149, 107002 (2020).
Cai, B. et al. Data-driven early fault diagnostic methodology of permanent magnet synchronous motor. Expert Syst. Appl. 177, 115000 (2021).
Luo, P., Yin, Z., Yuan, D., Gao, F. & Liu, J. An intelligent method for early motor bearing fault diagnosis based on Wasserstein distance generative adversarial networks meta learning. IEEE Trans. Instrum. Meas. 72, 3517611 (2023).
Liao, H. et al. Research on early fault intelligent diagnosis for oil-impregnated cage in space ball bearing. Expert Syst. Appl. 238, 121952 (2024).
Jiang, W. L., Zhao, Y. H., Zang, Y., Qi, Z. Q. & Zhang, S. Q. Feature extraction and diagnosis of periodic transient impact faults based on a fast average Kurtogram–GhostNet method. Processes 12, 287 (2024).
Huang, N. E. Review of empirical mode decomposition. in Wavelet Applications VIII (eds Szu, H. H., Donoho, D. L., Lohmann, A. W., Campbell, W. J. & Buss, J. R.) vol. 4391, 71–80 (Spie-Int Soc Optical Engineering, 2001).
Dragomiretskiy, K. & Zosso, D. Variational mode decomposition. IEEE Trans. Signal. Process. 62, 531–544 (2014).
Mercorelli, P. Denoising and harmonic detection using nonorthogonal wavelet packets in industrial applications. Jrl Syst. Sci. Complex. 20, 325–343 (2007).
Mercorelli, P. A fault detection and data reconciliation algorithm in technical processes with the help of Haar wavelets packets. Algorithms 10, 13 (2017).
Mercorelli, P. Recent advances in intelligent algorithms for fault detection and diagnosis. Sensors 24, 2656 (2024).
Qiao, Z., Lei, Y. & Li, N. Applications of stochastic resonance to machinery fault detection: A review and tutorial. Mech. Syst. Signal Process. 122, 502–536 (2019).
Zhai, Y., Fu, Y. & Kang, Y. Incipient bearing fault diagnosis based on the two-state theory for stochastic resonance systems. IEEE Trans. Instrum. Meas. 72, 3508011 (2023).
Benzi, R. Stochastic resonance: from climate to biology. Nonlinear Process. Geophys. 17, 431–441 (2010).
Li, Z., Shi, B., Ren, X. & Zhu, W. Research and application of weak fault diagnosis method based on asymmetric potential stochastic resonance. Meas. Control. 52, 625–633 (2019).
Gammaitoni, L., Hänggi, P., Jung, P. & Marchesoni, F. Stochastic resonance: A remarkable Idea that changed our perception of noise. Eur. Phys. J. B. 69, 1–3 (2009).
Leng, Y. G., Leng, Y. S., Wang, T. Y. & Guo, Y. Numerical analysis and engineering application of large parameter stochastic resonance. J. Sound Vib. 292, 788–801 (2006).
He, Q., Wang, J., Liu, Y., Dai, D. & Kong, F. Multiscale noise tuning of stochastic resonance for enhanced fault diagnosis in rotating machines. Mech. Syst. Signal. Proc. 28, 443–457 (2012).
Li, H., Bao, R., Xu, B. & Zheng, J. Intrawell stochastic resonance of bistable system. J. Sound Vib. 272, 155–167 (2004).
Leng, Y., Wang, T., Guo, Y., Xu, Y. & Fan, S. Engineering signal processing based on bistable stochastic resonance. Mech. Syst. Signal Process. 21, 138–150 (2007).
Tan, J. et al. Study of frequency-shifted and re-scaling stochastic resonance and its application to fault diagnosis. Mech. Syst. Signal Process. 23, 811–822 (2009).
Li, J., Chen, X., Du, Z., Fang, Z. & He, Z. A new noise-controlled second-order enhanced stochastic resonance method with its application in wind turbine drivetrain fault diagnosis. Renew. Energy. 60, 7–19 (2013).
Lei, Y., Lin, J., He, Z. & Zuo, M. J. A review on empirical mode decomposition in fault diagnosis of rotating machinery. Mech. Syst. Signal Process. 35, 108–126 (2013).
Zheng, R., Nakano, K., Hu, H., Su, D. & Cartmell, M. P. An application of stochastic resonance for energy harvesting in a bistable vibrating system. J. Sound Vib. 333, 2568–2587 (2014).
Lei, Y., Han, D., Lin, J. & He, Z. Planetary gearbox fault diagnosis using an adaptive stochastic resonance method. Mech. Syst. Signal Process. 38, 113–124 (2013).
Shi, P., Li, M., Zhang, W. & Han, D. Weak signal enhancement for machinery fault diagnosis based on a novel adaptive multi-parameter unsaturated stochastic resonance. Appl. Acoust. 189, 108609 (2022).
Zhao, W., Wang, J. & Wang, L. The unsaturated bistable stochastic resonance system. Chaos: Interdisciplinary J. Nonlinear Sci. 23, 033117 (2013).
Rousseau, D., Rojas Varela, J. & Chapeau-Blondeau, F. Stochastic resonance for nonlinear sensors with saturation. Phys. Rev. E. 67, 021102 (2003).
Li, Z. & Shi, B. A piecewise nonlinear stochastic resonance method and its application to incipient fault diagnosis of machinery. Chin. J. Phys. 59, 126–137 (2019).
Qiao, Z., Lei, Y., Lin, J. & Jia, F. An adaptive unsaturated bistable stochastic resonance method and its application in mechanical fault diagnosis. Mech. Syst. Signal Process. 84, 731–746 (2017).
Cui, L. & Xu, W. A new piecewise nonlinear asymmetry bistable stochastic resonance model for weak fault extraction. Machines 10, 373 (2022).
Hu, B. et al. An adaptive periodical stochastic resonance method based on the grey Wolf optimizer algorithm and its application in rolling bearing fault diagnosis. J. Vib. Acoust. -Trans ASME. 141, 041016 (2019).
Wu, D., Liao, Y., Hu, C., Yu, S. & Tian, Q. An enhanced fuzzy control strategy for low-level thrusters in marine dynamic positioning systems based on chaotic random distribution harmony search. Int. J. Fuzzy Syst. 23, 1823–1839 (2021).
雷亚国 韩冬, 林京, 何正嘉, & 谭继勇. 自适应随机共振新方法及其在故障诊断中的应用 机械工程学报. 48, 62–67 (2012).
Zhang, Z. & Ma, J. Adaptive parameter-tuning stochastic resonance based on SVD and its application in weak IF digital signal enhancement. EURASIP J. Adv. Signal. Process. 24 https://doi.org/10.1186/s13634-019-0617-5 (2019).
Huang, X. Stochastic resonance in a piecewise bistable energy harvesting model driven by harmonic excitation and additive Gaussian white noise. Appl. Math. Model. 90, 505–526 (2021).
Wang, J., He, Q. & Kong, F. An improved multiscale noise tuning of stochastic resonance for identifying multiple transient faults in rolling element bearings. J. Sound Vib. 333, 7401–7421 (2014).
A novel mechanical. Fault signal feature extraction method based on unsaturated piecewise tri-stable stochastic resonance. Measurement 168, 108374 (2021).
Yang, X. S. & Deb, S. Cuckoo search via lévy flights. In 2009 world Congress on nature. Biologically Inspired Comput. (NaBIC) 210–214 https://doi.org/10.1109/NABIC.2009.5393690 (2009).
Acknowledgements
This research was supported by the National Natural Science Foundation of China (Grant No. 52275067) and the Province Natural Science Foundation of Hebei, China (Grant No. E2023203030).
Author information
Authors and Affiliations
Contributions
Conceptualization, Y.Z.; methodology, Y.Z.; software, Y.Z. and T.E.; validation, X.G.; formal analysis, A.J.; resources, W.J.; data curation, Y.Z. and E.T.; writ-ing—original draft preparation, Y.Z.; writing—review and editing, W.J.; visualization, X.J.; super-vision, W.J.; project administration, W.J. All authors have read and agreed to the published version of the manuscript.
Corresponding authors
Ethics declarations
Competing interests
The authors declare no competing interests.
Additional information
Publisher’s note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
Open Access This article is licensed under a Creative Commons Attribution-NonCommercial-NoDerivatives 4.0 International License, which permits any non-commercial use, sharing, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons licence, and indicate if you modified the licensed material. You do not have permission under this licence to share adapted material derived from this article or parts of it. The images or other third party material in this article are included in the article’s Creative Commons licence, unless indicated otherwise in a credit line to the material. If material is not included in the article’s Creative Commons licence and your intended use is not permitted by statutory regulation or exceeds the permitted use, you will need to obtain permission directly from the copyright holder. To view a copy of this licence, visit http://creativecommons.org/licenses/by-nc-nd/4.0/.
About this article

Cite this article
Zhao, Y., Jiang, A., Jiang, W. et al. An improved bistable stochastic resonance method and its application in early bearing fault diagnosis. Sci Rep 15, 23156 (2025). https://doi.org/10.1038/s41598-025-01889-0
Received:
Accepted:
Published:
DOI: https://doi.org/10.1038/s41598-025-01889-0
