
Abstract
To assess the performance of the PPP-B2b service, most existing studies typically store real-time PPP-B2b messages and leverage them to acquire precise satellite orbits and clock offsets. However, they often overlook potential interferences, such as occlusions and receiving delays, that may occur in real-time scenarios. Consequently, these studies fail to fully capture the real-time positioning capabilities of PPP-B2b. This study assesses real-time static and kinematic precise point positioning (PPP) solutions based on BDS-3 and BDS-3/GPS. The findings reveal that both BDS-3 and GPS systems demonstrate high signal matching with PPP-B2b, resulting in quicker convergence in real-time static PPP solutions and maintaining stable positioning accuracy without divergence. Particularly noteworthy is the higher precision observed in the north–south direction. Under BDS-3, the convergence time is approximately 26 min, with horizontal accuracy below 0.2 m, vertical accuracy below 0.4 m. Utilizing BDS-3/GPS reduces the convergence time by roughly 30% while maintaining comparable accuracy (horizontal accuracy below 0.2 m, vertical accuracy below 0.4 m). In real-time kinematic PPP solutions, based on the PPP-B2b algorithm, decimeter-level accuracy is attained, particularly in the north and south directions. The convergence time is approximately 1 h and 28 min, longer than real-time static PPP solutions, due to clock system biases. However, within the time periods after convergence and with no divergence, real-time kinematic PPP solutions achieve horizontal accuracy of 4 cm and vertical accuracy of 8 cm.
Similar content being viewed by others

Introduction
Global navigation satellite systems (GNSS) represent groundbreaking technology that has rapidly evolved since the initial deployment of the GPS system1,2. The landscape of satellite navigation has undergone profound transformation over the past three decades, transitioning from a singular GPS-dominated environment to a multi-constellation ecosystem comprising Russia’s GLONASS, China’s BeiDou, Europe’s Galileo, Japan’s QZSS, and India’s NavIC3. This proliferation of satellite constellations has drastically enhanced positioning capabilities worldwide, with approximately 120 operational navigation satellites currently orbiting Earth4. Through a complex interplay of satellites, ground control stations, and user devices, these systems provide high-precision global positioning, navigation, and timing services, fundamentally reshaping daily lives and professional endeavors5,6. The strategic importance of multi-constellation GNSS extends beyond mere positioning improvements, offering enhanced resilience against signal interference, jamming, and spoofing—critical considerations for applications demanding continuous availability and reliability7.
Precise point positioning (PPP) represents a revolutionary paradigm shift within the GNSS domain, enabling high-precision positioning without dependence on differential corrections from nearby reference stations8. Unlike traditional real-time kinematic (RTK) techniques that require dense networks of reference stations, PPP leverages precise satellite orbit and clock corrections to achieve comparable accuracy with a single receiver9. The fundamental principle underlying PPP involves the meticulous modeling of error sources—including ionospheric delays (with advanced high-order correction methods being particularly important for applications like LEO satellite orbit determination10), tropospheric effects, satellite antenna phase center variations, and relativistic effects—combined with precise satellite orbit and clock products to eliminate or substantially mitigate positioning errors11. In recent years, Real-Time PPP (RT-PPP) has emerged as a prominent area of research and development, particularly in commercial sectors12,13,14,15. RT-PPP enhances traditional PPP by offering real-time high-precision positioning applications, unlocking possibilities in industries such as autonomous driving, precision agriculture, construction, and maritime navigation16. The introduction of PPP-B2b has further expanded opportunities for real-time high-precision positioning applications, representing a significant advancement in satellite-based augmentation systems. However, comprehensively assessing the performance and reliability of PPP-B2b in practical scenarios requires in-depth research and evaluation17.
PPP-B2b positioning represents a cutting-edge advancement in high-precision GNSS technology, uniquely provided by the BeiDou navigation satellite system (BDS-3). Unlike traditional satellite-based augmentation systems that operate primarily through geostationary satellites, the PPP-B2b service transmits correction data via the B2b signal frequency across the entire BDS-3 constellation, including medium earth orbit (MEO), inclined geosynchronous orbit (IGSO), and geostationary earth orbit (GEO) satellites18. This innovative distribution mechanism substantially enhances signal accessibility and reliability, particularly in challenging environments where signal obstruction is common19. The PPP-B2b service provides comprehensive correction parameters, including satellite orbit and clock corrections, differential code biases, and quality indicators, enabling centimeter-level positioning accuracy with suitably equipped receivers20. Supported by an advanced ground infra-structure network, PPP-B2b demonstrates an average convergence time remarkably close to that of final product-based precise PPP solutions, making it a reliable and efficient method for real-time high-precision applications21,22,23,24,25,26,27,28. Previous studies evaluating the PPP-B2b service have primarily focused on the storage of real-time PPP-B2b messages and their utilization to obtain precise satellite orbits and clock corrections. However, these studies often overlook potential real-time scenario interferences, such as obstructions and reception delays, thereby failing to provide a comprehensive depiction of the real-time positioning capabilities of PPP-B2b. Therefore, conducting ex-tensive research on the performance of PPP-B2b in practical applications is imperative to fully understand its potential value across various domains and provide further support and guidance for future developments.
The primary objective of this study is to conduct a comprehensive evaluation and analysis of real-time static and real-time kinematic PPP performance, utilizing the Unistrong MG10s high-precision positioning terminal as the foundation. Specifically, we emphasize the PPP-B2b service, aiming to provide valuable insights into the positioning capabilities and accuracy of PPP solutions in both static and dynamic scenarios. This research addresses critical knowledge gaps regarding PPP-B2b performance in real-world environments by: (1) assessing actual positioning performance under genuine real-time conditions rather than simulated environments; (2) quantifying the convergence characteristics and post-convergence stability in various operational scenarios; (3) comparing single-system (BDS-3) and multi-system (BDS-3/GPS) performance to identify optimal configuration strategies; and (4) evaluating the resilience of PPP-B2b solutions against environmental challenges in maritime environments29. By delving deeply into the performance and characteristics of PPP-B2b, we aim to offer practical information and guidance for advancing and optimizing real-time high-precision positioning applications, ultimately contributing to the broader field of satellite navigation and positioning technologies.
The remainder of this paper is organized as follows: Section “Methodology” presents the methodology employed in this study, including a detailed description of the PPP-B2b correction parameters and the algorithms utilized for real-time corrections. Section “Experiments and results” details the experimental setup, data collection procedures, and presents a comprehensive analysis of the results obtained from real-time static and kinematic PPP solutions. In Section “Discussion”, we discuss the implications of our findings, comparing the performance metrics across different system configurations and operational scenarios. Finally, Section “Conclusions” concludes the paper by summarizing the key findings, highlighting the significance of our research, and suggesting potential directions for future work in this domain.
Methodology
B2b correction parameters: principles and implementation
The PPP-B2b service delivers several critical correction parameters to enhance positioning accuracy. These parameters include satellite mask (defining visible satellites), orbit corrections, clock corrections, differential code bias (DCB, which accounts for hardware delays in satellite signal generation), and user range accuracy index (an indicator of correction quality). For BDS-3 satellites, users receive a comprehensive suite of corrections—orbit, clock, and DCB—through the B2b signal. In contrast, for GPS satellites, the service provides only orbit and clock corrections30.
These correction parameters serve to refine the standard CNAV1 and LNAV broadcast ephemerides for both BDS and GPS constellations. The orbit correction component consists of three key identifiers: IODN (Issue of Data Navigation), which enables broadcast ephemeris table matching; IOD Corr (Issue of Data Correction), which ensures proper orbit-clock correction pairing; and vectorial corrections in three orthogonal directions—radial (R), along-track (A), and cross-track (C)—capturing the satellite’s position offsets.
Similarly, the clock correction parameters include IOD Corr, which verifies alignment with the corresponding orbit corrections, and clock bias correction, which compensates for satellite clock timing errors. The mathematical formulation for transforming these corrections into precise satellite positions and clock offsets is expressed as follows:
In Eq. 1, \(\delta {\mathbf{X}}\) represents the orbit correction vector projected into the Earth-Centered Earth-Fixed (ECEF) coordinate system’s X, Y, and Z directions. This correction is derived from \(\delta {\mathbf{O}}\), the orbit correction vector obtained from PPP-B2b information in the R, A, and C directions. The terms \(e_{{{\text{radial}}}}\), \(e_{{{\text{along}}}}\), and \(e_{{{\text{cross}}}}\) denote unit vectors in their respective directions, facilitating the coordinate transformation from the orbital reference frame to the ECEF system.
Equations 2 and 3 demonstrate the application of these corrections. In Eq. 2, \({\mathbf{X}}_{{{\text{orbit}}}}\) represents the computed real-time precise satellite position, obtained by applying the correction vector \(\delta {\mathbf{X}}\) to the broadcast ephemeris position \({\mathbf{X}}_{{{\text{broadcast}}}}\). Similarly, Eq. 3 expresses \(t_{{{\text{satellite}}}}\), the precise clock offset, as the broadcast ephemeris clock offset \(t_{{{\text{broadcast}}}}\) adjusted by the term \(\frac{{C_{0} }}{c}\), where \(C_{0}\) is the clock correction parameter received through the PPP-B2b service, and \(c\) represents the speed of light in vacuum.
Utilizing PPP-B2b parameters for real-time corrections
The hardware algorithm incorporates PPP-B2b correction parameters to refine broadcast ephemerides for satellite positioning. This refinement process involves two primary correction types: adjustments to satellite orbit coordinates in the ECEF reference frame and modifications to clock offset values. These corrections, derived from real-time PPP-B2b data streams, significantly enhance the precision of both satellite positional and temporal parameters.
The mathematical framework for implementing these corrections is expressed through the following equations:
In Eq. 4, \({\mathbf{R}}_{{{\text{cor}}}}\) denotes the corrected satellite orbit vector, derived from combining the broadcast ephemeris position (\({\mathbf{R}}_{{{\text{broadcast}}}}\)) with the PPP-B2b derived correction vector (\({\mathbf{R}}_{{\text{PPP - B2b}}}\)). Equation 5 defines \(\delta {\mathbf{r}}_{{{\text{sat}}}}\) as the offset between the computed precise satellite position and the broadcast ephemeris position. Equation 6 characterizes \(\delta t_{{{\text{sat}}}}\) as the temporal difference between the precise satellite clock and the broadcast ephemeris clock, adjusted by the PPP-B2b correction term \(\delta t_{{\text{PPP - B2b}}}\). This mathematical framework elucidates how PPP-B2b parameters systematically improve real-time satellite positioning and timing accuracy.
Experiments and results
To evaluate the real-time positioning capabilities of PPP-B2b, we employed the Unistrong MG10s receiver—a high-precision GNSS terminal capable of processing PPP-B2b correction signals. This commercial-grade receiver was selected for its ability to generate real-time PPP solutions through onboard hardware algorithms, making it particularly suitable for our study.
The experimental setup incorporated a Trimble GA830 antenna, chosen for its exceptional signal reception characteristics. This antenna features robust multipath rejection capabilities, high signal-to-noise ratio performance, and effective tracking of low-elevation satellites. Its advanced RF filtering technology effectively mitigates iridium transmission interference, while its durable housing provides resilience in maritime environments. For optimal signal reception, we positioned the antenna with unobstructed sky visibility on the ship’s bridge, connecting it to the Unistrong MG10s via a 30-m cable.
Data processing was performed using RTKLIB software31, which enabled comprehensive analysis of positioning quality. We evaluated multiple performance parameters, including convergence time and positioning accuracy. For this study, we defined convergence as the point at which horizontal errors remained consistently below 0.24 m and vertical errors below 0.41 m for a continuous 20-min period 32.
Data collection and comparative analysis of RT-PPP solutions
The PPP-B2b service currently provides correction messages for 59 satellites across multiple constellations. This includes correction data for 27 BeiDou navigation satellite system (BDS) satellites (specifically C19 through C46, excluding C31) and 32 Global Positioning System (GPS) satellites (G01 through G32). To evaluate the positioning performance, we collected continuous 24-h real-time static PPP solutions and observation data for both BDS-3 and BDS-3/GPS constellation combinations on Day of Year (DOY) 113 and 114 in 2023. All data were sampled at 30-s intervals. For accuracy assessment, we established a reference benchmark by comparing the real-time static PPP solutions against known GNSS control point coordinates located in Guangzhou, as illustrated in (Fig. 1).

Static PPP experiment environment.
For the kinematic evaluation, we conducted real-time PPP solution measurements in the Pearl River Estuary on DOY 124 of 2023, maintaining the same 30 s sampling interval. Figure 2 depicts the experimental setup, showing the antenna placement (highlighted by a red circle) mounted atop the ship’s bridge. This positioning ensured unobstructed sky visibility while minimizing multipath effects that could compromise signal quality. Throughout the experiment, the vessel’s velocity varied—occasionally reaching 10 knots during specific maneuvers but predominantly maintaining approximately 2 knots.

Kinematic PPP experiment environment with antenna location highlighted in red circle.
To establish a reference standard for evaluating the real-time kinematic PPP solutions, we employed post-processed PPP solutions. The accuracy of these solutions depends significantly on the precise satellite ephemerides and clock products used in the processing workflow. Different products may introduce varying levels of systematic errors, and the accuracy of precise ephemerides and clock corrections can differ across satellite systems. Based on previous comparative research examining the impact of various International GNSS Service (IGS) precise products on post-processing accuracy in kinematic environments, we determined that products from the German Research Centre for Geosciences (GFZ) delivered superior positioning accuracy32. Therefore, we utilized the GFZ final product series from the multi-GNSS experiment (MGEX), which includes precise ephemerides (SP3) and clock corrections (CLK). Using the post-processing module RTKPOST in RTKLIB software, we integrated the GFZ final products with our observation data to generate the reference post-processing PPP solution.
Real-time static PPP accuracy analysis based on PPP-B2b
Real-time static PPP accuracy analysis of BDS-3
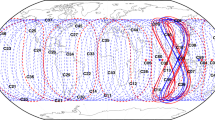
Figure 3 illustrates the operational trajectories of BDS-3 satellites observed on DOY 113. Notably, satellites C38, C39, and C40—which belong to the inclined geosynchronous orbit (IGSO) constellation—display a characteristic figure-eight pattern. IGSO satellites offer an advantage over medium earth orbit (MEO) satellites through their extended tracking periods, which significantly enhances the availability of B2b correction products30.

Skyplot of BDS-3 on DOY 113.
The sky plot configuration of the BDS-3 system exhibits a well-structured arrangement with progressively improving satellite distribution. As shown in Fig. 4, the BDS-3 constellation demonstrates remarkable density and uniformity. The consistent availability of more than 8 visible satellites ensures a favorable geometric configuration, reflected in the position dilution of precision (PDOP) value of 1.8. While Fig. 4 confirms that the BDS-3 system provides sufficient visible satellites for PPP-B2b positioning, accurate position determination requires proper alignment between broadcast ephemeris data and observational measurements to determine the actual number of participating satellites.

Number of visible satellites and DOP on DOY 113.
Figure 5 presents the number of satellites actively contributing to BDS-3 positioning calculations. The data reveals only a minimal reduction compared to the total visible satellites, with at least 8 satellites consistently participating in the positioning process. This finding underscores the robust correlation between the BDS-3 system and PPP-B2b signals, which directly contributes to shorter convergence times.

Valid satellites of BDS-3 positioning.
The performance of real-time static PPP using BDS-3 is presented in (Fig. 6). The results demonstrate that PPP based on PPP-B2b corrections achieves convergence within approximately 26 min. Post-convergence performance exhibits horizontal accuracy better than 0.2 m and vertical accuracy better than 0.4 m. The root mean square (RMS) errors in the east-north-up (ENU) coordinate system are 0.10, 0.03, and 0.26 m, respectively. Importantly, the positioning solution maintains remarkable stability after convergence, with no instances of divergence observed—a benefit attributable to the substantial number of satellites participating in the computation.

Real-time static PPP solution using BDS-3.
Real-time static PPP accuracy analysis of BDS-3/GPS
Figure 7 presents the operational trajectory of BDS-3/GPS on DOY 114. The integration of GPS results in a more comprehensive sky plot configuration with a denser and more uniform satellite constellation. The number of available satellites increases to more than 17 (Fig. 8), and this well-distributed constellation significantly reduces positioning errors33. The improved geometric configuration enhances satellite spatial distribution, resulting in a decreased position dilution of precision (PDOP) value of 1.2. PDOP, a unitless measure that indicates the effect of satellite geometry on positioning accuracy, serves as a valuable indicator of solution quality, with lower values generally associated with better precision.

Skyplot of BDS-3/GPS on DOY 114.

Number of visible satellites and DOP on DOY 114.
Figure 9 illustrates the number of satellites participating in BDS-3/GPS dual-system positioning. The data confirms a strong correlation between the BDS-3/GPS dual-system and PPP-B2b signals, which directly contributes to shorter convergence times.

Valid satellites of BDS-3/GPS dual-system positioning.
Figure 10 displays the real-time static PPP solution using BDS-3/GPS. The dual-system configuration achieves faster convergence, reaching the convergence threshold in approximately 18 min—about 30% faster than with BDS-3 alone. Post-convergence, the solution maintains excellent precision with horizontal accuracy below 0.2 m and vertical accuracy better than 0.4 m. The Root Mean Square (RMS) errors in the East-North-Up (ENU) coordinate system are 0.07 m, 0.03 m, and 0.18 m, respectively.

Real-time static PPP solution using BDS-3/GPS.
A particularly noteworthy finding is that the BDS-3/GPS static PPP solution yields horizontal positioning errors at the centimeter level, with superior performance in the north–south direction. Both BDS-3 and BDS-3/GPS solutions demonstrate remarkable stability, with RMS errors averaging approximately 3 cm. This precision primarily stems from the optimal distribution of satellites affecting the positioning accuracy in the ENU directions. As shown in Figs. 3, 7, the symmetric satellite distribution in the north–south direction facilitates the reduction of systematic errors, resulting in enhanced positioning accuracy along this axis. This directional advantage may be partially attributed to the experimental location in Guangzhou, situated at a lower latitude where the satellite geometry is particularly favorable for north–south measurements.
Real-time kinematic PPP accuracy analysis based on PPP-B2b
Figure 11 illustrates the positioning accuracy of real-time kinematic precise point positioning (PPP) using the BDS-3/GPS dual-constellation system. For this analysis, post-processed PPP solutions served as the reference benchmark. The real-time kinematic PPP solution—where the receiver is in motion during measurement—achieves centimeter-level accuracy using the PPP-B2b algorithm. Notably, positioning precision exhibits directional asymmetry, with superior accuracy in the North–South direction compared to the East–West direction. This directional performance pattern aligns with our previous findings from static PPP analysis.

Positioning accuracy of real-time kinematic PPP using BDS-3/GPS dual systems with post-processing PPP reference.
The solution requires approximately 1 h and 28 min to achieve convergence, significantly longer than static positioning scenarios. This extended convergence period stems primarily from East–West accuracy discrepancies. The underlying cause is the systematic difference between clock references: GPS broadcast clocks are derived from a global monitoring network, while PPP-B2b broadcast clocks originate from regional networks, resulting in systematic clock offsets25. The root mean square (RMS) errors in the east-north-up (ENU) coordinate system are 0.31, 0.12, and 0.51 m, respectively.
During the observation interval from 5:48 to 6:47, we identified seven epochs where the solution temporarily reverted to single-point positioning mode, indicating a convergence-divergence pattern. This phenomenon can be attributed to the geometric configuration of geostationary earth orbit (GEO) satellites. GEO satellites maintain fixed positions above the equator, causing users in the Northern Hemisphere to consistently remain south of these satellites. This geometric relationship can lead to signal occlusions from the southern direction14, particularly affecting PPP-B2b correction messages. The marine environment of our experiment introduced additional instability factors, as vessel movement could temporarily block correction signals from southerly directions, triggering solution divergence after initial convergence.
Figure 12 presents the vessel’s motion characteristics throughout the experiment. While the vessel’s speed fluctuated—occasionally reaching 10 knots during specific maneuvers—it maintained approximately 2 knots for most of the observation period. Our comparative analysis of positioning accuracy time series revealed no significant correlation between vessel speed and positioning precision. This finding suggests that movement velocity has negligible impact on PPP-B2b-based kinematic positioning quality. The observed divergence patterns likely relate more closely to the vessel’s attitude (pitch, roll, and yaw) than to its translational speed.

Impact of vessel motion speed in real-time kinematic PPP.
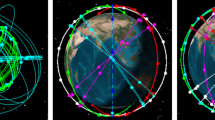
Figure 13 depicts the number of satellites and position dilution of precision (PDOP) values observed during dynamic experiments. Compared to static experiments with BDS-3/GPS integration, dynamic trials exhibited an average satellite visibility of approximately 15 satellites and a mean PDOP of 1.5. Despite elevated PDOP values during the initial convergence phase, our analysis revealed no significant correlation between positioning accuracy and variations in satellite count or PDOP throughout the experimental duration. This observation may be attributed to the testing site’s lower latitude (approximately 22 degrees north), which presents less favorable geometry for the unevenly distributed BDS-3 satellite constellation. As illustrated in Fig. 14, the sky plot from dynamic experiments shows a distinct distribution pattern, where GPS satellites (depicted in black) and BDS-3 satellites (shown in green) demonstrate different coverage characteristics. Notably, the BDS-3 constellation exhibits a predominantly southeast-oriented distribution—a unique geometric pattern absent in static experiments—potentially explaining the relatively higher PDOP values observed during dynamic testing.

Number of visible satellites and DOP during kinematic experiment.

Skyplot of BDS-3/GPS during kinematic experiment.
Figures 15, 16 present two distinct time intervals of stable real-time kinematic PPP solutions post-convergence (without divergence): from 03:00 to 05:00 and from 08:00 to 10:00, respectively. During the 03:00–05:00 interval, Root Mean Square (RMS) errors in the East, North, and Up components were 0.04 m, 0.04 m, and 0.42 m, respectively. The 08:00–10:00 period demonstrated RMS errors of 0.09, 0.06, and 0.08 m in the corresponding components. These results demonstrate that the real-time kinematic PPP solution based on PPP-B2b service achieves horizontal accuracy of 4 cm and vertical accuracy of 8 cm. Collectively, data from both time intervals confirm that the PPP-B2b-based real-time kinematic positioning solution delivers exceptional performance in both horizontal and vertical dimensions after convergence. These findings align with previous research5,6, which similarly documented the outstanding positioning capabilities of the PPP-B2b algorithm in dynamic environments. Our results suggest that the PPP-B2b approach consistently provides superior positioning performance under dynamic conditions, making it particularly valuable for applications requiring centimeter-level positioning accuracy in mobile platforms. These insights have significant implications for real-time applications involving dynamic movement, such as precise maritime navigation and autonomous vehicle guidance.

Real-time kinematic PPP solution after convergence (3 a.m.–5 a.m.).

Real-time kinematic PPP solution after convergence (8 a.m.–10 a.m.).
Discussion
Table 1 presents a comparative analysis of positioning accuracy and convergence time across different precise point positioning (PPP) solutions. Our investigation into BeiDou navigation satellite system (BDS-3) and combined BDS-3/GPS performance in real-time static PPP contexts reveals several key insights relevant to global navigation satellite system (GNSS) applications.
The PPP-B2b signal demonstrated excellent compatibility with both BDS-3 and GPS systems, evidenced by accelerated convergence times in real-time static PPP solutions. This rapid convergence capability—essential for applications requiring immediate high-precision positioning—stems from the robust signal alignment between the BDS-3 and GPS constellations. Furthermore, these solutions exhibited remarkable stability after convergence, maintaining consistent accuracy without divergence. Such stability is particularly valuable for applications demanding sustained reliability, as it ensures continuous high-precision performance without accuracy degradation.
Our analysis revealed notable directional variations in positioning accuracy, with north–south measurements consistently outperforming east–west measurements. This directional asymmetry likely results from variations in satellite constellation geometry and signal propagation characteristics, factors that significantly influence application-specific performance. The BDS-3 system demonstrated impressive capabilities, achieving convergence in approximately 26 min with horizontal accuracy below 0.2 m, vertical accuracy below 0.4 m, and minimal Root Mean Square (RMS) errors in the East-North-Up (ENU) coordinate system. These metrics confirm the exceptional performance of BDS-3 PPP solutions for applications requiring both precision and efficiency.
Integration of GPS with BDS-3 substantially enhanced real-time static PPP performance, reducing convergence time while maintaining comparable accuracy levels. The dual-system approach delivered consistently high precision after convergence, with RMS errors ranging from 0.07 to 0.18 m. This configuration allows users to obtain high-precision positioning data more rapidly—a significant advantage for time-sensitive applications requiring immediate and reliable positioning information.
Beyond static positioning, we examined real-time kinematic PPP solutions using the combined BDS-3/GPS approach. While these solutions achieved decimeter-level accuracy (particularly in north–south measurements), they required longer convergence times compared to static applications. This extended convergence period primarily stems from differences in broadcast clock sources—a critical consideration for applications requiring both speed and precision.
Our research identified a notable phenomenon in kinematic applications: occasional convergence to single-point solutions followed by divergence. This behavior primarily results from the fixed southern positioning of geostationary earth orbit (GEO) satellites relative to northern hemisphere users, potentially creating signal obstructions. Environmental factors, such as vessel motion in maritime applications, can further impede PPP-B2b correction signals from southern directions. Nevertheless, once kinematic solutions achieve stable convergence, they deliver exceptional accuracy—approximately 4 cm horizontally and 8 cm vertically—making them ideally suited for high-precision applications.
Several limitations must be acknowledged in our experimental approach. First, our study was conducted in a specific geographic region (Guangzhou, approximately 23°N), which limits the generalizability of our findings to other latitudes, especially high-latitude regions where BDS-3 satellite geometry differs significantly. Second, our kinematic tests were performed in relatively controlled maritime conditions with moderate vessel motion dynamics. More challenging environments—such as urban canyons, dense foliage, or severe weather conditions—would likely yield different performance characteristics. Third, our evaluation focused exclusively on the hardware-based implementation of PPP-B2b through a commercial receiver; alternative software implementations might demonstrate different convergence behaviors and accuracy profiles.
The practical implications of these findings extend beyond technical performance metrics. The demonstrated centimeter-level accuracy of PPP-B2b in both static and post-convergence kinematic applications suggests its viability for precision-critical domains previously dominated by RTK techniques. However, the extended convergence time for kinematic applications (approximately 88 min) currently limits its utility for scenarios requiring immediate high-precision positioning upon system initialization. This constraint could be addressed through several potential improvements:
-
1.
Multi-constellation integration beyond BDS-3/GPS: Incorporating additional constellations such as Galileo and GLONASS could potentially further reduce convergence time and enhance positioning robustness, particularly in challenging environments.
-
2.
Advanced ambiguity resolution techniques: Implementing integer ambiguity resolution specifically optimized for PPP-B2b could significantly accelerate convergence time in both static and kinematic applications.
-
3.
Clock bias modeling improvements: Developing enhanced models to address the systematic differences between global and regional clock reference systems could mitigate the convergence delays observed in kinematic applications.
-
4.
Attitude-dependent signal occlusion mitigation: For maritime applications, developing compensation algorithms that account for vessel attitude effects on signal reception could reduce the occurrence of divergence events observed in our kinematic tests.
-
5.
Environmental resilience enhancements: For practical deployments, improving the system’s performance under challenging conditions through advanced multipath mitigation and signal processing techniques would expand its applicability across diverse operational scenarios.
In conclusion, BDS-3 and integrated BDS-3/GPS solutions demonstrate superior accuracy and reliability across diverse operational scenarios. The dual-system approach represents a significant technological advancement, substantially reducing convergence time without compromising accuracy. These findings have important implications for positioning system selection and PPP computation optimization across various operational contexts. As GNSS technology continues to evolve, the insights from this research will contribute significantly to advancing high-precision positioning applications in both static and dynamic environments.
Conclusions
Our comprehensive evaluation of real-time static PPP solutions using BDS-3 and BDS-3/GPS reveals that both navigation systems exhibit excellent compatibility with PPP-B2b signals. This compatibility results in faster convergence times and stable positioning accuracy after convergence, with no observed divergence. Notably, positioning accuracy in the north–south direction consistently exceeds that in the east–west direction across all configurations.
When using only the BDS-3 system, convergence time averages approximately 26 min, achieving horizontal accuracy better than 0.2 m and vertical accuracy better than 0.4 m. The root mean square (RMS) errors in the east-north-up (ENU) directions measure 0.10, 0.03, and 0.26 m, respectively. The introduction of a dual-system approach incorporating BDS-3/GPS reduces convergence time by approximately 30% while maintaining comparable accuracy levels. After convergence, the horizontal accuracy remains below 0.2 m and vertical accuracy below 0.4 m, similar to BDS-3 alone. However, the RMS errors in the ENU directions decrease to 0.07, 0.03, and 0.18 m, indicating slightly enhanced precision in the dual-constellation configuration.
Our investigation of real-time kinematic PPP solutions using BDS-3/GPS demonstrates that the PPP-B2b algorithm achieves decimeter-level accuracy, with superior precision in the north–south direction compared to east–west. The convergence time for kinematic applications extends to approximately 1 h and 28 min, significantly longer than for static solutions. This extended convergence period stems from clock system biases, specifically the difference between GPS broadcast clocks (sourced from global networks) and PPP-B2b broadcast clocks (derived from regional networks).
During certain time intervals, real-time kinematic PPP solutions may initially converge but subsequently revert to single-point solutions. This behavior primarily results from two factors: the obstruction of PPP-B2b products by geostationary earth orbit (GEO) satellites consistently positioned to the south of Northern Hemisphere users, and environmental instabilities in maritime settings where vessel movement can temporarily block correction signals from southern directions. Despite these challenges, during periods of stable convergence without divergence, real-time kinematic PPP solutions achieve impressive accuracy—horizontal precision of 4 cm and vertical precision of 8 cm. These results highlight the considerable potential of PPP-B2b technology for high-precision positioning applications across various domains.
Based on the performance characteristics identified in this study, the PPP-B2b technology shows significant potential across diverse application domains. For static applications with centimeter-level accuracy requirements, PPP-B2b offers compelling advantages in geodetic control surveys, cadastral mapping, structural monitoring, and tectonic deformation studies. The excellent north–south directional precision makes it particularly valuable for monitoring infrastructure along riverways, coastlines, and transportation corridors oriented in this direction. Land deformation monitoring applications, such as landslide detection and dam deformation surveillance, can leverage the sub-decimeter accuracy and stable convergence of the BDS-3/GPS dual-system solution.
For kinematic applications, where positioning performance reaches 4 cm horizontal and 8 cm vertical accuracy post-convergence, PPP-B2b presents significant opportunities in precision agriculture (automated guidance of farm machinery and variable rate application), hydrographic surveying (bathymetric mapping and harbor dredging operations), and marine construction (pipeline laying and underwater structure placement). The technology’s performance in maritime environments, as demonstrated in our study, indicates its suitability for offshore positioning applications, coastal zone management, and marine resource exploration where extended operation periods can accommodate the longer convergence time. Urban applications such as autonomous vehicle navigation and machine control in construction would benefit from the centimeter-level precision, though the extended convergence time would necessitate system initialization prior to critical operations. Additionally, the BDS-3/GPS integration’s superior performance suggests significant advantages for regions with favorable visibility of both constellations, particularly in the Asia–Pacific region where BDS-3 coverage is optimized.
Both BDS-3 and GPS systems demonstrate exceptional accuracy and reliability in real-time static PPP applications. The dual-system approach offers substantial benefits, particularly in reducing convergence time without sacrificing positional precision. These findings provide valuable guidance for selecting appropriate positioning systems and optimizing PPP computational processes across different operational contexts. While real-time kinematic PPP solutions based on PPP-B2b technology deliver remarkable positioning accuracy, users should exercise caution in environments prone to southern signal obstructions or maritime instability. Our research significantly advances understanding of real-time PPP performance characteristics and establishes a foundation for further refinement of high-precision positioning technologies.
Data availability
The datasets generated during and/or analysed during the current study are available from the corresponding author on reasonable request.
References
Hofmann-Wellenhof, B., Lichtenegger, H. & Wasle, E. GNSS–Global Navigation Satellite Systems: GPS, GLONASS, Galileo, and More (Springer Science & Business Media, 2007).
Kong, S. H. et al. Ieee access special section editorial: Gnss, localization, and navigation technologies. IEEE Access 7, 131649–131652 (2019).
Teunissen, P. J. & Montenbruck, O. Montenbruck, Springer Handbook of Global Navigation Satellite Systems (Springer, 2017).
Steigenberger, P. & Montenbruck, O. Montenbruck, Galileo status: orbits, clocks, and positioning. GPS Solut. 21 (2), 319–331 (2017).
Murray, J. R. et al. Regional global navigation satellite system networks for crustal deformation monitoring. Seismol. Res. Lett. 91 (2A), 552–572 (2020).
Chen, B. et al. Real-time precise point positioning with a Xiaomi MI 8 android smartphone. Sensors 19 (12), 2835 (2019).
Zaminpardaz, S., Teunissen, P. & Nadarajah, N. IRNSS/NavIC and GPS: a single-and dual-system L5 analysis. J. Geod. 91 (8), 915–931 (2017).
Kouba, J. & Héroux, P. Precise point positioning using IGS orbit and clock products. GPS Solut. 5, 12–28 (2001).
Bisnath, S. & Gao, Y. Current state of precise point positioning and future prospects and limitations. In Observing Our Changing Earth (eds Bisnath, S. & Gao, Y.) (Springer, 2009).
Guo, J. et al. High-order ionospheric delay correction of GNSS data for precise reduced-dynamic determination of LEO satellite orbits: cases of GOCE GRACE SWARM. GPS Solut. 27 (1), 13 (2023).
Li, X. et al. Precise positioning with current multi-constellation global navigation satellite systems: GPS, GLONASS Galileo and BeiDou. Sci. Rep. 5 (1), 8328 (2015).
Ramachandran, D., et al. Real-time precise point positioning (RT-PPP) for positioning and mapping. In: GCEC 2017: Proceedings of the 1st Global Civil Engineering Conference 1. (Springer, 2019).
An, X., Ziebold, R. & Lass, C. J. G. S. From RTK to PPP-RTK: towards real-time kinematic precise point positioning to support autonomous driving of inland waterway vessels. GPS Solut. 27 (2), 86 (2023).
Matsakis, D. & Camparo, J. Topical collection on timekeeping in space: technology, practice, promise, and benefits. GPS Solut. 25 (2), 75 (2021).
Di, M. et al. Evaluation of real-time PPP-based tide measurement using IGS real-time service. Sensors 20 (10), 2968 (2020).
Laurichesse, D. The CNES Real-time PPP with undifferenced integer ambiguity resolution demonstrator. In Proceedings of the 24th international technical meeting of the satellite division of the institute of navigation (ION GNSS 2011). (2011).
Cao, Y. et al. Initial analysis of the BDS satellite autonomous integrity monitoring capability. GPS Solut. 23, 1–12 (2019).
Yang, Y. et al. Introduction to BeiDou-3 navigation satellite system. Navigation 66 (1), 7–18 (2019).
Li, R. et al. Analysis of the wide area differential correction for BeiDou global satellite navigation system. Res. Astron. Astrophys. 18 (11), 133 (2018).
Li, M. et al. Precise point positioning with the BeiDou navigation satellite system. Sensors 14 (1), 927–943 (2014).
Xu, Y., Yang, Y. & Li, J. J. G. S. Performance evaluation of BDS-3 PPP-B2b precise point positioning service. GPS Solut. 25 (4), 142 (2021).
Bahadur, B. & Nohutcu, M. J. M. Comparative analysis of MGEX products for post-processing multi-GNSS PPP. Measurement 145, 361–369 (2019).
Yu, Z., et al. Performance Analysis of Real-Time Precise Point Positioning Based on PPP-B2b Signal. in China Satellite Navigation Conference. (Springer, 2022)
Xu, X. et al. Positioning performance assessment of PPP-B2b service: Static and kinematic PPP mode. In China Satellite Navigation Conference (CSNC 2022) Proceedings (eds Xu, X. et al.) (Springer, 2022).
Zhou, H. et al. Real-time single-frequency precise point positioning using BDS-3 PPP-B2b corrections. Measurement 205, 112178 (2022).
Chen, Y. et al. Real-time precise point positioning during outages of the PPP-B2b service. Remote Sens. 15 (3), 784 (2023).
Liu, Y., Yang, C. & Zhang, M. J. R. S. Comprehensive analyses of PPP-B2b performance in China and surrounding areas. Remote Sens. 14 (3), 643 (2022).
Guo, H. et al. Performance of precise point positioning for BDS-3 PPP-B2b service. In China Satellite Navigation Conference (CSNC 2022) Proceedings (eds Yang, C. & Xie, J.) (Springer, 2022).
Jin, S., Wang, Q. & Dardanelli, G. J. R. S. A review on multi-GNSS for earth observation and emerging applications. Remote Sens. 14 (16), 3930 (2022).
Zhang, W. et al. Initial assessment of BDS-3 precise point positioning service on GEO B2b signal. Adv. Space Res. 69 (1), 690–700 (2022).
Takasu, T. and A. Yasuda. Development of the low-cost RTK-GPS receiver with an open source program package RTKLIB. In International symposium on GPS/GNSS. (2009).
Erol, S. A comparative study for performance analysis of kinematic multi-constellation GNSS PPP in dynamic environment. J. Marine Sci. Eng. 8 (7), 514 (2020).
Weiming, T., C. Jian, and Meng, H. Analysis of the impact of BeiDou regional constellation on relative positioning accuracy. Geomat. Inf. Sci. Wuhan Univ. 41(8), 1107–1112 (2015).
Acknowledgements
The authors would like to thank the GFZ for providing high-accuracy orbit and clock products.
Author information
Authors and Affiliations
Contributions
Y.L. conceived and designed the study, conducted the primary research, collected the data, and wrote the original manuscript. J.S. contributed to the expanded analysis of results, enhanced technical discussions, and helped revise the manuscript. Z.M. assisted with data analysis, refined the illustrations, and contributed to the methodology section. L.S. supervised the project, provided guidance on the research direction, and reviewed the final manuscript. All authors reviewed and approved the final version of the manuscript.
Corresponding author
Ethics declarations
Competing interests
The authors declare no competing interests.
Additional information
Publisher’s note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
Open Access This article is licensed under a Creative Commons Attribution-NonCommercial-NoDerivatives 4.0 International License, which permits any non-commercial use, sharing, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons licence, and indicate if you modified the licensed material. You do not have permission under this licence to share adapted material derived from this article or parts of it. The images or other third party material in this article are included in the article’s Creative Commons licence, unless indicated otherwise in a credit line to the material. If material is not included in the article’s Creative Commons licence and your intended use is not permitted by statutory regulation or exceeds the permitted use, you will need to obtain permission directly from the copyright holder. To view a copy of this licence, visit http://creativecommons.org/licenses/by-nc-nd/4.0/.
About this article

Cite this article
Lin, Y., Song, L., Shen, J. et al. Performance assessment of BeiDou-3 PPP-B2b real time pre-cise point positioning. Sci Rep 15, 17325 (2025). https://doi.org/10.1038/s41598-025-02477-y
Received:
Accepted:
Published:
Version of record:
DOI: https://doi.org/10.1038/s41598-025-02477-y
