
Abstract
Soil Temperature Wireless Sensor Networks (STWSNs) are essential for optimizing agricultural practices by providing real-time soil temperature data in cotton fields. However, current heuristic algorithms face limitations in achieving high coverage with minimal sensor nodes. This paper introduces an Adaptive Chaotic Gaussian Lens Snake Optimization Algorithm (ACGLSOA) to address this issue. The proposed ACGLSOA integrates two novel adaptive factors to enhance local search capabilities and incorporates advanced chaos operators to refine initial solutions. Additionally, the algorithm employs an improved Gaussian operator and a lens reflection mechanism to expand the search space, thereby enhancing global search performance. Experimental results indicate that ACGLSOA achieves a network coverage of 98.91% for STWSNs, with a node utilization efficiency of 73.8%. Compared to the Snake Optimizer (SO), Artificial Bee Colony Algorithm (ABC), RIME Optimization Algorithm (RIME), and Particle Swarm Optimization Algorithm (PSO), ACGLSOA improves STWSN coverage by 9.74%, 8.24%, 14.45%, and 29.68%, respectively, and enhances node utilization efficiency by 7.27%, 6.15%, 10.78%, and 22.13%, respectively.
Similar content being viewed by others

Introduction
Soil temperature has a significant impact on cotton growth. An appropriate soil temperature can promote seed germination, increase growth rates, accelerate root development, and enhance plant metabolic activity. However, due to the long growth cycle of cotton and the significant changes in soil temperature requirements at different growth stages, real-time monitoring and accurate control are necessary to ensure that cotton receives the optimal soil temperature conditions at each stage. Traditional soil temperature monitoring methods rely on manual observation, which suffers from low monitoring frequency, poor accuracy, and other issues that fail to meet the real-time and accuracy requirements. In contrast, Soil Temperature Wireless Sensor Networks (STWSNs) offer significant advantages1. STWSNs provide continuous and real-time soil temperature monitoring, allowing farmers to accurately manage and control farming activities based on the collected data2. Particularly in large-scale cotton farming, STWSNs effectively monitor spatial variations in soil temperature, offering personalized management solutions for different plots, improving cotton yields, reducing agricultural production costs, and promoting the sustainable development of cotton production.
Selecting the deployment locations for sensor nodes in a sensor network is crucial. Since soil temperature can vary across different locations, choosing appropriate deployment sites avoids issues of inaccurate monitoring data and monitoring blind spots3. Common node deployment methods in farmland environments include uniform arrangement and random deployment. These methods involve distributing sensor nodes uniformly across the monitoring area or randomly seeding nodes into the target area. However, these approaches often lead to overlaps and gaps in the sensor nodes’ sensing range, resulting in wasted sensing resources and incomplete coverage of some boundary areas in the monitoring region4. To improve sensor network coverage in the target area, it is essential to accurately determine the relative positions of sensor nodes to maximize the use of sensing resources. Analysis shows that identifying the optimal locations for sensor nodes constitutes an NP-hard problem. To address this complexity, researchers frequently use heuristic algorithms, which offer robust adaptability and effective global optimization capabilities in solving NP-hard problems5,6,7. For instance, the Simulated Annealing Algorithm (SA)8 and the RIME Optimization Algorithm (RIME)9 rely on physical phenomena. Additionally, algorithms based on biological behavior patterns, such as the Particle Swarm Optimization (PSO)10, Honey Badger Algorithm (HBA)11, Beetle Antennae Search Algorithm (BASA)12, and Artificial Bee Colony (ABC)13, are widely used.
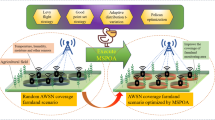
Current cotton cultivation requires accurate soil temperature monitoring to meet the needs of different growth stages, thereby increasing yields and reducing production costs. However, traditional manual temperature monitoring is infrequent, has poor accuracy, and does not allow real-time control. Although wireless soil temperature sensor networks (STWSNs) can provide continuous real-time data, their node deployment faces problems such as insufficient coverage and resource wastage. Conventional uniform or random deployment methods often result in monitoring blind zones or coverage overlap, limiting monitoring effectiveness. Existing optimization algorithms, such as simulated annealing and particle swarm optimization, solve the node placement problem to a certain extent, but they are still insufficient in terms of adaptability, local performance, and coverage completeness. To this end, this paper proposes a novel adaptive chaotic Gaussian mirror snake optimization algorithm (ACGLSOA), combined with a coverage optimization model, to be applied to optimize the deployment of nodes in STWSNs. ACGLSOA enhances the algorithm’s local search capability and initial solution quality through the improvement mechanisms of adaptive, chaotic, and Gaussian operators, and it can complete the full coverage of the target area more efficiently and, at the same time, improve node The utilization rate of ACGLSOA significantly reduces the monitoring cost and realizes the accurate and efficient management of agricultural resources.
The main contributions of this paper are as follows:
-
(1)
This paper proposes an Adaptive Chaotic Gaussian Lens Snake Optimization Algorithm (ACGLSOA) for the coverage optimization of STWSNs in cotton fields. The algorithm achieves 98.91% coverage and 73.8% node utilization efficiency. Compared to other heuristic algorithms, ACGLSOA provides larger coverage with fewer sensor nodes, demonstrating superior efficiency in node deployment optimization.
-
(2)
The algorithm integrates adaptive, chaotic, and Gaussian operators with a lens reflection mechanism to optimize node deployment. Adaptive operators enhance local search, chaotic operators improve the initial solution by adjusting individual positions, and Gaussian operators boost spatial search capability. The lens reflection mechanism expands the search range, increasing solution accuracy. These improvements significantly enhance the algorithm’s solving ability and the feasibility of node deployment, achieving complete coverage of the cotton field with fewer soil temperature wireless sensor nodes.
-
(3)
Key challenges in STWSN node deployment optimization include node sensing range, number of sensor nodes, and network coverage area. A novel mathematical model is developed, considering these three factors for optimal coverage. Optimizing the sensing range improves soil temperature monitoring in cotton fields while minimizing the number of nodes, reducing agricultural production costs, and enhancing STWSN efficiency. Optimizing node locations minimizes coverage gaps and redundancy, ensuring accurate soil temperature monitoring. A new objective function integrates these attributes-sensing range, node count, and coverage area-to comprehensively evaluate target area coverage. This approach improves agricultural management accuracy, reduces resource and labor waste, and boosts economic efficiency.
-
(4)
Simulation experiments compare the network coverage and node utilization efficiency of the proposed ACGLSOA with SO, ABC, RIME, and PSO across different area sizes and sensor node counts. The model’s optimization effect and robustness are tested by varying the target area dimensions, number of nodes, and sensing radius. Results show that ACGLSOA achieves 98.91% coverage with 41 nodes and a 5m sensing radius in a 60m by 40m area and 97.93% coverage with the same number of nodes and a 4m sensing radius in a 50m by 30m area. These results outperform the other algorithms in terms of coverage optimization.
This paper is structured as follows: Section Introduction introduces the potential of the Adaptive Chaotic Gaussian Lens Snake Optimization Algorithm (ACGLSOA) for enhancing Soil Temperature Wireless Sensor Network (STWSN) deployment. Section Related work reviews related research on swarm intelligence algorithms applied to STWSN coverage optimization. Section System model outlines the proposed STWSN coverage optimization model, while Section ACGLSOA for improved coverage rate of STWSNs details the design and mechanisms of ACGLSOA for addressing the coverage optimization problem. Section Results and discussion presents the simulation experiments and analyzes the results, and Section Conclusions offers concluding remarks and discusses potential future research directions.
Related work
The accuracy of data collection in wireless sensor networks (WSNs) is highly dependent on sensor placement. Optimizing node deployment locations can significantly increase the nodes’ perceived coverage of the target area14. Numerous researchers have extensively optimized WSNs coverage to improve node usage efficiency and the perceived coverage area.
Initial studies focused on a uniform and random placement of sensor nodes. A uniform arrangement using a regular grid or equal spacing ensures a consistent coverage area and reduces redundant coverage15. However, the complexity and irregularity of real-world environments make it challenging to achieve optimal coverage with uniform arrangements. Random placement performs better in specific irregular environments by distributing sensor nodes randomly. However, random arrangements often result in uneven node distribution, increasing coverage blind spots and network energy consumption16.
Researchers have proposed computational geometry and virtual force algorithms to overcome the shortcomings of uniform and random arrangements. Computational geometry algorithms use geometric theory to solve the problem of optimal sensor node placement by constructing geometrical shapes and optimizing node positions to maximize coverage area17. However, these algorithms usually have high computational complexity, making them difficult to apply in large-scale networks. Virtual force algorithms optimize node layout by simulating mechanical relationships in the physical world18. Nodes interact through modelled attractive and repulsive forces, enabling automatic adjustment for optimal coverage. However, the performance of this algorithm in complex environments still needs improvement and is susceptible to local optima.
Heuristic algorithms demonstrate high efficiency and adaptability, making them well-suited for addressing complex, large-scale, or resource-constrained problems, especially in contrast to traditional exact algorithms19,20. In wireless sensor network (WSN) coverage optimization, heuristic approaches are particularly effective and are commonly categorized into three primary types: nature-inspired21, human behavior-inspired22, and animal behavior-inspired algorithms23. By simulating natural biological behaviours or physical phenomena, these algorithms offer robust global search capabilities and resilience, significantly improving optimization outcomes and agricultural economic efficiency.
Nature-inspired heuristic algorithms utilize various natural phenomena to guide the optimization process. For example, genetic algorithms designed based on the theory of natural evolution are systematically reviewed by M. Gen et al., highlighting their advantages24 when applied to coverage optimization problems. In addition to the PSO algorithm designed and inspired by the foraging behaviour of bird flocks, H.D. Jia et al. introduced multiple optimization strategies into PSO. They solved the WSN coverage problem, which finally achieved good coverage results25. However, the algorithm tends to fall into local optimization and cannot obtain a globally optimal solution that gives a more adequate and perfect coverage scheme.
Heuristic algorithms inspired by animal behaviour have also been widely used in sensor network coverage optimization problems. For example, the ant colony optimization algorithm designed to mimic the ants’ method of finding the shortest path to the food source improves the coverage of WSNs but suffers from the high complexity of the algorithm’s parameters, which prevents it from converging quickly to obtain the optimal solution26. The bat optimization algorithm designed by imitating the echolocation behaviour of bats improves the node localization accuracy and coverage optimization efficiency of WSNs, which is very advantageous in solving complex optimization problems, but it is prone to fall into the trap of local optimality during the solution process and fails to generate the globally optimal solution27. There are also honey badger optimization algorithms28 and artificial bee colony algorithms29 designed to mimic the foraging behaviour of honey badgers and the nectar harvesting behaviour of honey bees, which also have high solution accuracy in WSN coverage problems. However, they can give a coverage scheme for the target area. However, they generally suffer from problems of high parameter complexity, easy fall into local optimality, and slow convergence speed. In addition to the above optimization algorithms inspired by animal behaviour, various heuristic algorithms have been applied to the sensor network coverage optimization problem in order to solve the problems of a large number of algorithm parameters, poor robustness, and low solution accuracy, and thus to improve the sensing performance of WSN.
Researchers have implemented a variety of optimization operators and mechanisms in heuristic algorithms to improve their performance. These enhancements target stochasticity, robustness, global search capability, and local optima avoidance. An example is the Snake Optimizer, where chaos operators are integrated to increase the stochasticity of the initial solution30. This modification allows for better search space exploration and helps prevent premature convergence-cite. The incorporation of chaos theory adds an unpredictable element that enables the algorithm to identify a diverse set of potential solutions. Similarly, in the Butterfly Optimization Algorithm, adaptive Cauchy variational operators have been applied to enhance robustness and maintain performance across various problems and conditions31. These operators adjust the search process dynamically, providing improved navigation capabilities through complex optimization landscapes while avoiding local optima. In the Whale Optimization Algorithm, researchers have also leveraged Lévy’s flight strategy to enhance global search capabilitycite32. By introducing long-range steps and utilizing mathematical properties of Lévy distributions, this approach promotes more effective search space exploration while balancing exploitation and exploration during optimization. A further improvement is seen in the Gray Wolf Optimization Algorithm, where a variational mechanism has been incorporated, enhancing the algorithm’s ability to escape local optima by introducing controlled variations into the search process33. This mechanism helps the algorithm explore new regions of the search space and avoid getting stuck in suboptimal solutions, significantly improving overall search efficiency and effectiveness. These operators improve the local search ability of the algorithm, enhance the randomness of the initial solution of the algorithm so that it can better jump out of the local optimum to obtain the global optimum solution, and also enhance the robustness of the algorithm so that it can give full play to the optimization role in a variety of environments. However, the complexity and running time of the algorithm are slightly increased, and how to balance the solution accuracy and complexity is an urgent problem to be solved.
Motivation
In this section, the characteristics and limitations of the research discussed earlier are summarized and analyzed. The overall conclusions are as follows.
-
1.
Most swarm intelligence algorithms encounter difficulties in substantially enhancing the uniformity of sensing node deployment, resulting in certain areas with overlapping monitoring and consequently leading to resource waste. For STWSNs deployed over large cotton fields, such redundant monitoring is undesirable as it incurs additional costs and negatively impacts economic returns.
-
2.
Many network coverage algorithms not based on heuristic methods tend to rely on predetermined rules, limiting their flexibility to adapt to the complex environments typical of cotton fields. Furthermore, these algorithms often lack an emphasis on network coverage optimization, leading to a subpar performance in sensor network coverage optimization tasks.
-
3.
Heuristic-based network coverage algorithms generally suffer from high computational complexity and are prone to becoming trapped in local optima. There is still significant potential for improving the number of sensor nodes in the network and enhancing node utilization efficiency.
In response to these challenges, this paper proposes a sensor network node deployment optimization algorithm that improves node deployment uniformity and provides a more efficient coverage strategy to achieve full area coverage with fewer sensor nodes. The algorithm enhances local search capability by employing adaptive operators that adjust algorithm parameters based on the number of iterations. Additionally, the chaos operator improves initial solution quality, the Gaussian operator enhances population diversity and local search capacity, and the lens reflection mechanism expands the search range, bolstering global search capability. Our research offers an efficient and viable solution to the sensor network coverage optimization problem, further advancing the application and development of sensor networks and contributing to the realization of precision agriculture.
System model
Coverage strategies
Sensory coverage models assess sensing capacity and quality by examining the spatial relationships between sensors and target points within the monitored area. However, the coverage performance of STWSNs is also affected by the placement and characteristics of sensor nodes34. These nodes can be classified into different models based on specific criteria. From a sensing outcome perspective, they can be categorized into Boolean or probabilistic sensing models. Based on their directionality, they may be further divided into unidirectional or omnidirectional sensing models. Regarding coverage methods, nodes are classified as target coverage, fence coverage, or area coverage models.
Perception models in sensor technology determine object information through binary (Boolean) results or probability-based data. Sensing models include unidirectional models, which detect information within a specified direction or range, and omnidirectional models, which detect information uniformly in all directions within a set range. Target coverage refers to the ability of a sensor to effectively monitor specific events or points within the designated area. Fence coverage involves placing sensors in a perimeter-like configuration around the target region to ensure thorough monitoring along the boundary and within the enclosed area. Area coverage requires the strategic placement of sensors to monitor all locations within the target region, achieving full area coverage for continuous information collection.
This study adopts a node model that combines Boolean logic, omnidirectional sensing, and an area coverage approach to monitor soil temperature in farmland, aligning with the characteristics of STWSNs and the monitoring requirements. This approach aims to enhance network coverage and node utilization efficiency, providing a comprehensive sensing range across the target area with fewer sensor nodes. Figure 1 illustrates the area coverage model applied in this paper.

STWSN area coverage model.
Based on the above model, further simplifications are made to improve the application of the sensor coverage model in node optimization. Firstly, the target area is assumed to be a two-dimensional plane so that nodes can be placed anywhere within the monitoring area. In addition, nodes placed within the target area are considered prime points. The sensing distance of each node is also defined as \(\rho\).
These simplifications simplify the optimization process, enabling more efficient deployment of sensor nodes to maximize coverage and utilization in the specified area. By treating nodes as prime points, calculations and modelling are simplified. Defining a fixed sensing distance \(\rho\) ensures consistent coverage metrics for each node, facilitating a precise evaluation of network performance and optimization results.
Sensor models
In wireless sensor networks, the choice of sensor model directly affects the performance and reliability of the whole system. In order to maximize the efficiency of agricultural production, this paper takes the network coverage of wireless sensor networks and the utilization efficiency of sensor nodes as the key indicators of optimization to ensure that the sensor coverage scheme optimized by the algorithm meets the needs of soil temperature monitoring in cotton fields.
Assume that the target area of the STWSN is a two-dimensional plane consisting of a rectangular field of \(W \times L\) pixel blocks. M isomorphic nodes are arranged in the field. All nodes have the same sensing attributes, including the same sensing mode and sensing radius \(\rho\). For stability, the sensor nodes are denoted as \(S=\{S_1, S_2, S_3, \ldots , S_n\}\), where the position of each monitored node is \(P_i=(x_i,y_i)\). Assuming the location of the monitored point a is (x, y), Eq. (1) represents the distance from the monitoring point to the monitored node:
This equation calculates the distance between any monitored node and a monitoring point within the target area, which is crucial for evaluating coverage and optimizing node placement.
To streamline the presentation of our experimental findings, we have chosen the Boolean-type disc perception model for our wireless sensor node setup. In this selected model, a node is deemed to be detected with a probability of 1 if it falls within the sensing radius \(\rho\) of the sensing node. Conversely, if the distance exceeds \(\rho\), the target is considered undetected with a probability of 035. The wireless sensor node definitions used in this paper are set according to Eq. (2) and Fig. 2.

Boolean disk perception model.
Where \(P_{\text {cov}}(S_i, a)\) is the probability of sensing the target point a, \(d(S\_i, a)\) is the distance between the monitored node and the target point a, and \(\rho\) is the sensing radius. This model simplifies the coverage evaluation in the experimental setup, providing clear criteria for determining whether the sensor network senses a point within the target area. This approach allows for straightforward sensor coverage analysis and visualization, aiding in optimizing node deployment strategies for soil temperature monitoring in agricultural fields.
Assessment indicators
Evaluation metrics in swarm intelligence algorithms include convergence speed, solution quality, stability, algorithm complexity, search capability, adaptability, and robustness. These metrics provide a comprehensive measure of the efficiency and effectiveness of the algorithm. However, when applying the algorithm to the coverage optimization problem, the coverage rate and node use efficiency obtained from the solution more directly evaluate the node coverage ability and resource use efficiency after optimization. These indicators are closely related to actual application requirements. Therefore, this paper chooses these two indicators as the model evaluation method.
(1) Coverage: the primary function of STWSNs is to realize the comprehensive coverage of the target area, so the coverage ability is an essential index for evaluating the coverage algorithm of STWSNs. All nodes are defined as mutually independent events, and the probability of all nodes perceiving a specific target is shown in Eq. (3).
Where S denotes all sensor nodes in the target area, the uncovered probability of each sensor to the target point a is \(1 - P_{\text {cov}}(S_i, a)\), and the product of these uncovered probabilities represents the probability that all sensors have not covered the target point a. Subtracting this product from 1 gives the probability of at least one sensor covering the target point, which is the probability of the entire sensor set covering the target point.
The coverage ratio in the area coverage problem can be defined as the ratio of the area of all areas covered by the STWSN to the area of the target area, as shown in Eq. (4).
Where \(P_{\textrm{cov}}(S_{i})\) represents the area of the sensed area of the sensor node in the target area, W represents the width of the target area, and L represents the length of the target area.
(2) Node usage efficiency: In wireless sensor networks, the sensing area is maximized by reasonably arranging the sensing nodes to achieve effective monitoring and coverage of the target area. Node usage efficiency ensures the most effective use of sensing nodes to maintain coverage quality, reduce energy consumption, and improve the system’s performance. In this paper, node usage efficiency refers to the ratio of the actual coverage area of nodes to the theoretical coverage area of nodes. The specific mathematical expression is shown in Eq. (5).
The physical relationship between node usage efficiency and coverage is shown in Eq. (6).
Coverage objective function
The coverage problem of STWSNs can be studied from two points: firstly, how to ensure the full coverage of the target area by sensor nodes to realize comprehensive and accurate soil temperature data transmission; secondly, how to improve the efficiency of node usage to adequately perceive the target area while reducing the number of nodes used, thereby making full use of the sensing resources.
In this paper, the coverage area denotes the degree of coverage of the monitoring area by the sensor nodes, and the ultimate goal is to achieve sufficient coverage using fewer nodes in the monitoring area. To ensure effective coverage of the target area, it is necessary to ensure that the sensor nodes are deployed in the target area and that each monitoring point in the area is within the sensing range of at least one sensor node to prevent coverage gaps. The mathematical model solution function for the STWSN coverage optimization problem is shown in Eq. (7).
ACGLSOA for improved coverage rate of STWSNs
The Snake Optimizer (SO)36 draws inspiration from key behavioural phases observed in snakes, including foraging, combat, and reproduction. Initially, the algorithm employs a random population distribution to enhance diversity, facilitating subsequent optimization processes. Following this initial distribution, the population adapts its behaviour to environmental factors, such as ambient temperature and food availability. When food resources fall below a predetermined threshold, the population enters an exploration phase involving random location selection and positional updates relative to available food sources. When food resources are at or above this threshold, the population transitions to an exploitation phase characterized by adaptive foraging, competitive interactions, and mating behaviours modulated by temperature and population density. While the SO algorithm shows potential in addressing sensor node coverage challenges, certain limitations persist, including slow convergence, vulnerability to local optima, and constrained global search capabilities.
This paper describes various enhancements to ACGLSOA to adjust sensor node deployment locations to achieve adequate coverage of the target area and increase the efficiency of soil temperature sensor node usage. The method integrates adaptive inertia weighting factors to improve the local search capability. In addition, a more efficient chaos operator is used to optimize the initial node positions. Population diversity is also improved by adding an improved Gaussian operator. In addition, raster imaging and inverse learning methods were combined into the breeding behaviour to enhance the spatial search capability. Therefore, this study effectively optimizes the node deployment of STWSN using the ACGLSOA method to achieve the goal of complete coverage of the target area with fewer sensors.
Adaptive inertia weighting factors
As part of the sensor network coverage optimization problem, the location update strategy has a significant impact on coverage and determines the final solution’s effectiveness. Depending on the stage of the search process, an inertia weighting factor (/omega) dictates the search strategy for each phase.
By increasing the inertia weight factor early in the search, the population is encouraged to explore widely, preventing premature convergence to local optima and laying a solid foundation for subsequent optimization processes. By conducting extensive exploration, the optimization process is enhanced by a diverse set of potential solutions.
In the later stages of the search, a reduced inertia weight factor focuses the population’s efforts on the local region, enabling a more refined and precise search. By adjusting the final solution, the accuracy and quality of the solution are enhanced, making it possible to identify an optimal solution with greater accuracy. Adaptive inertia weighting allows the algorithm to optimize sensor network coverage by balancing exploration with exploitation.
In this paper, two adaptive inertia weighting factors are designed to be added to the food quality design and to the individual location update process when the food is smaller than a set threshold. The properties of the adaptive factors are used to improve the algorithm’s global and local search ability and optimize the accuracy of the final coverage scheme.
Food quality design includes the first adaptive inertia weight factor. The inertia weight factor is gradually reduced from an initially more significant value to a smaller final value by using a linear decreasing strategy. The adaptive operator update formula is as follows, and it enhances the global search capability of the population in the early stages of the search and improves local search accuracy in the later stages.
In the above equation, \(w_{\text {max}}\) and \(w_{\text {min}}\) denote the maximum and minimum values of the weights. I indicate the maximum number of iterations, and i represent the current number. By implementing this strategy, the ACGLSOA can balance exploration and exploitation throughout the optimization process, leading to a more effective and efficient search for the optimal node deployment configuration in STWSNs.
The second adaptive inertia weight factor is added to the position update process when the food quality is smaller than a set threshold. This inertia weight factor is designed according to the sinusoidal function characteristics, allowing individuals in the population to adjust their search strategies dynamically throughout the search process. Different search behaviors are implemented at different stages based on the current iteration number. At the beginning and end of the iteration, the adaptive inertia weight factor is significant, encouraging the population to explore a wide range, thus avoiding local optimality and enhancing global search ability. In the middle of the iteration, the adaptive inertia weight factor is minor, enabling the snake individuals to perform a refined search within the neighborhood of the current solution, enhancing local search ability, and improving the quality and accuracy of the solution. The specific adaptive operator update formula is as follows.
Through the incorporation of the sinusoidal-based adaptive inertia weight factor, the ACGLSOA can dynamically adjust its search strategies throughout the optimization process by incorporating this constant \(\pi\) with a value of 3.1416. By balancing exploration and exploitation effectively, the algorithm improves global and local search capabilities and, ultimately, increases the efficiency of node deployment in STWSNs.
Chaos operator
Network coverage is directly affected by the initial position of sensor network nodes. Inadequate initial positions can result in coverage dead spots or redundant coverage, which reduces the network’s efficiency. By distributing initial positions reasonably, these issues can be mitigated, and coverage uniformity can be improved.
As a result of their nonlinear, unpredictable, and traversing abilities, chaotic operators effectively produce sequences with strong randomness and a broad range of traversal. By applying these chaotic sequences to the initial positions of nodes in a sensor network, the calibre and variety of the initial nodes and solutions can be greatly heightened. This improvement ultimately results in more consistent and extensive sensor coverage, optimizing the overall performance of the network.
The population is set to have M individuals in a D-dimensional space, and a D-dimensional vector \(A=\{a_1, a_2, a_3, \ldots , a_D\}\) is first randomly generated as the first individual of the sequence, where \(a_{i}\in \left[ -0.6,0.6\right] ,1\le i\le D\). The chaotic sequence expression designed is as follows.
Node initialization is accomplished by incorporating chaotic operators into the ACGLSOA through the following steps.
-
(1)
Generate a chaotic sequence. A chaotic sequence of total length M is generated by substituting A as c(1) into the chaotic sequence expression and performing \(M-1\) iterations, where M represents the number of nodes.
-
(2)
Map Chaotic Sequences into the Search Space. The generated chaotic sequence is mapped into the search space using the logical mapping interpolation method with the following transformation expression.
$$\begin{aligned} x_{\text {iD}}=x_{i}+\frac{(1+a_{\text {iD}})\times (x_{u}-x_{l})}{2} \end{aligned}$$(11)In this equation, \(x_{\text {iD}}\) denotes the individual’s position in the solution space, and \(c_{\text {iD}}\) represents the value obtained by the individual through the chaotic sequence expression. \(x_{u}\) and \(x_{l}\) denote the maximum and minimum values of the target region boundary, respectively.
-
(3)
Initialize Nodes. The mapped node positions are used as the initial nodes of the algorithm, providing initial solutions for the subsequent optimization process.
After the node chaos initialization, the node mapping distribution map and histogram are obtained. These results are compared with those generated by node random distribution, as shown in Fig. 3.
Upon examination of Fig. 3, it is clear that the application of chaotic mapping results in a more evenly distributed scatter plot with minimal clustering. Conversely, the use of random mapping displays noticeable clusters and sparse regions. Furthermore, a comparison between Fig. 3(b) and 3(d) reveals that the chaotic mapping histogram has a smoother, more continuous shape, while the random mapping histogram shows greater variability and irregularity.

Chaotic distributions vs. Random distributions.
The above mapping distributions and histograms clearly show that the points generated through chaotic mapping have higher randomness than random mapping. The higher the randomness of the node distribution, the higher the diversity of the initial population generated and the better the initial solution, thus increasing the possibility of obtaining a better deployment scheme for sensor network nodes.
Gaussian operator
In order to achieve high-quality optimization results when optimizing soil temperature sensor networks, it is crucial to enhance the algorithm’s ability to explore the search space. The Gaussian operator, known for its average distribution properties, offers a variety of benefits. This operator allows the population to expand across the entire search space in a Gaussian distribution pattern, effectively covering more potential optimal solution regions. Such a distribution characteristic greatly improves the efficiency of searching for the optimal solution and enhances the algorithm’s global search capability. Additionally, the Gaussian operator can also fine-tune individual positions by introducing random perturbations while retaining their favourable characteristics. This feature enables more precise exploration of near-optimal solutions in the surrounding neighbourhood, thus enhancing the algorithm’s local search capability. By incorporating the Gaussian operator into the individual position update phase, we can significantly improve the search space capabilities of each individual within the population. As a result, overall performance is enhanced, and superior optimization results are achieved.
After ACGLSOA completes population division, each sub-population position is adjusted to fully utilize the Gaussian operator’s properties. The Gaussian operator is introduced through the following steps.
-
(1)
Population division. Divide individuals in the population into males and females as follows:
$$\begin{aligned} & M_m=\left\lfloor {\frac{M}{2}}\right\rfloor \end{aligned}$$(12)$$\begin{aligned} & M_f = M-M_m \end{aligned}$$(13)Here, \(M_m\) and \(M_f\) denote the number of males and females, respectively.
-
(2)
Generate Gaussian noise. Introducing reasonable noise can significantly enhance the algorithm’s performance. Individuals in the search space need to ensure they do not deviate significantly from the position’s center, maintaining a moderate change magnitude. This approach avoids excessive perturbation, leading to chaos in the search space, and prevents too tiny perturbations, which cannot break local aggregation. Therefore, Gaussian distribution noise with a mean of 0 and variance of 0.8 is used for all individuals in the population. The probability density function (PDF) of the Gaussian distribution is:
$$\begin{aligned} f = \frac{1}{\sqrt{2\pi \sigma ^2}} e^{-\frac{(x-\mu )^2}{2\sigma ^2}} \end{aligned}$$(14)In this equation, f denotes the individual generated Gaussian noise, \(\sigma ^2\) is the set variance value, and \(\mu\) is the mean value.
-
(3)
Add Gaussian noise to the individuals in each subpopulation. This is done as follows:
$$\begin{aligned} & G_{mi} = X_{mi} + f \times (X_{Bm} - X_{mi}) \end{aligned}$$(15)$$\begin{aligned} & G_{fi} = X_{fi} + f \times (X_{Bf} - X_{fi}) \end{aligned}$$(16)In the above equations, \(G_{mi}\) and \(G_{fi}\) represent the positions of male and female individuals after Gaussian variation, \(X_{mi}\) and \(X_{fi}\) represent the positions of male and female individuals. \(X_{Bm}\) and \(X_{Bf}\) represent the positions of the most adapted male and female individuals, respectively.
-
(4)
Updating subpopulations. Replace the original and changed individuals to form a new population distribution.
Lens reflection mechanism
The lens reflection mechanism effectively combines the positional information of the best and worst individuals in the current population to enhance the positional attributes of newly generated individuals. This improvement subsequently extends the STWSN’s coverage range. By enabling the deployment of fewer sensor nodes within the same monitoring area, it reduces hardware costs and maintenance efforts, thereby increasing economic efficiency. The specific steps are as follows.
-
(1)
Reproductive behaviour. All population members update their positions according to temperature and reproductive ability. This step involves the preliminary exploration of the solution space and assessing the spawning state.
-
(2)
Identify the worst male and female individuals. After the breeding process, adaptability is calculated, Egg values are generated, and the worst-adapted individuals in the female and male populations are identified.
-
(3)
Replace the worst individual. When the Egg value is -1, the mirror reflection point of the worst individual is determined and replaced according to the lens reflection mechanism. The replacement process is completed using the following formulas:
$$\begin{aligned} & X_{Wm} = \frac{X_{Wm} + X_{Bm}}{2} + \frac{X_{Wm} + X_{Bm}}{2 \times i} - \frac{X_{Wm}}{i} \end{aligned}$$(17)$$\begin{aligned} & X_{Wf} = \frac{X_{Wf} + X_{Bf}}{2} + \frac{X_{Wf} + X_{Bf}}{2 \times i} - \frac{X_{Wf}}{i} \end{aligned}$$(18)
In these equations, \(X_{Wm}\) and \(X_{Wf}\) denote the positions of the least adapted male and female individuals, respectively.
Applying this mechanism ensures that individuals are more dispersed in the search space, improving population diversity and global search capability.
Proof of convergence for ACGLSOA
This section rigorously derives and proves the convergence of the proposed Adaptive Chaotic Gaussian Lens Snake Optimization Algorithm (ACGLSOA). We first establish the mathematical model of the algorithm, clarify each iterative step, and then, under certain reasonable assumptions, prove that the algorithm converges to the global optimal solution.
Problem description and algorithm model
We consider the following unconstrained optimization problem:
where \(f: \textbf{R}^n \rightarrow \textbf{R}\) is a continuous differentiable objective function, defined on the n-dimensional Euclidean space \(\textbf{R}^n\). Let \(x^* \in \textbf{R}^n\) denote the global optimal solution, and \(f^* = f(x^*)\) be the corresponding global minimum value.
At the k-th iteration, the ACGLSOA algorithm generates a new solution \(x_{k+1} \in \textbf{R}^n\) based on the current best solution \(x_k \in \textbf{R}^n\) and other individuals’ positions, using adaptive weights, chaotic perturbation, Gaussian perturbation, and mirror reflection strategies:
where \(\alpha _k, \beta _k \in \textbf{R}^n\) are the adaptive inertia weight vectors, satisfying the following constraints:
\(\delta _k^1, \delta _k^2 \in \textbf{R}^n\) are the perturbation vectors introduced by the chaotic operator and Gaussian operator, respectively; \(g_k \in \textbf{R}^n\) is the new solution generated through the mirror reflection mechanism; \(r_k \in \textbf{R}^n\) is a random perturbation vector following a zero-mean distribution with finite second moment, i.e., \(\textbf{E}[r_k] = \textbf{0}\) and \(\textbf{E}[|r_k|_2^2] < \infty\). \(\odot\) denotes the element-wise product.
Proof of algorithm convergence
To prove the convergence of the ACGLSOA algorithm, we first make the following basic assumptions:
-
(A1)
The objective function \(f(x)\) is continuously differentiable and bounded within the domain \(X\); that is, there exists a constant \(M > 0\) such that \(|f(x)| \le M, \forall x \in X\);
-
(A2)
Each individual in the initial population \(\{x_0\}\) is within the domain \(X\);
-
(A3)
The perturbations \(\delta _k^1, \delta _k^2\) introduced by the chaotic and Gaussian operators are bounded; specifically, there exists a constant \(C_{\delta } > 0\) such that \(|\delta _k^1| \le C_{\delta }, |\delta _k^2| \le C_{\delta }\);
-
(A4)
The expected perturbation term \(r_k\) follows a probability distribution with a mean of 0 and has a finite second moment, i.e., \(E(r_k) = 0, E(|r_k|^2) < \infty\);
-
(A5)
The mirror reflection solution \(g_k\) is located within a compact region \(\Omega\) of the solution space \(X\), i.e., \(g_k \in \Omega \subset X\).
Under these assumptions, we can prove the following two theorems:
1. The sequence of objective function values \(\{f(x_k)\}\) generated by the ACGLSOA algorithm converges.
Proof: From (A1), it is known that \(f(x)\) satisfies the Lipschitz continuity condition; that is, there exists a constant \(L > 0\) such that \(\forall x, y \in X\),
Using this condition, we can derive:
where \(D=\sup \limits _{x \in \Omega , y \in X} |x-y|<\infty\) is the finite diameter between \(\Omega\) and \(X\).
Thus, we have:
Let \(d_k = f(x_k)-f^*\), then \(d_{k+1} \le d_k+LC\). Given the structure of the algorithm, \(d_k\) is a monotonically non-increasing sequence. Combined with the boundedness of \(d_k\) (i.e., \(|d_k| \le M\)), by the monotone convergence theorem, the sequence \(\{d_k\}\) converges, implying that \(\{f(x_k)\}\) also converges.
2. If \(x^*\) is an accumulation point of \(\{x_k\}\), then \(x^*\) is the global optimal solution of \(f(x)\).
Proof: From (A5), \(\{x_k\}\) is bounded, and by the Bolzano-Weierstrass theorem, it must have a convergent subsequence \(\{x_{k_n}\}\). Let the limit of this subsequence be \(x^*\); then:
Since \(\{f(x_k)\}\) converges, there exists a limit:
Since \(\{f(x_{k_n})\}\) is a subsequence of \(\{f(x_k)\}\), it follows that:
Thus, \(a=f^*\), indicating that the limit point \(x^*\) satisfies \(f(x^*) = f^*\), and hence, \(x^*\) is the global optimal solution of \(f(x)\).
Summary of algorithm convergence
Through the above rigorous mathematical proof, we conclude that under the reasonable assumptions (A1)-(A5), the proposed ACGLSOA algorithm will converge to the global optimal solution \(x^*\) of the unconstrained optimization problem. This provides theoretical assurance for the effectiveness and reliability of the algorithm, laying the foundation for its application in practical scenarios.
Some assumptions in the above proofs, such as continuous differentiability and boundedness, are based on general optimization theory and algorithmic descriptions. In practical applications with noise, nonlinear constraints, or other conditions, some assumptions may need to be adjusted or relaxed to make the theoretical analysis more applicable to practical scenarios and to make reasonable applications in real-world environments.
ACGLSOA steps
The operation process of ACGLSOA can be divided into the following steps:
-
Step 1:
Initialization of the Algorithm. Initialize the algorithm with the relevant parameters: the number of population individuals M, the maximum number of iterations I, the number of problems q, the sensor perception radius \(\rho\), the length of the target area l, and the width of the target area w.
-
Step 2:
Chaos initialization. Initialize the initial positions of sensor nodes using chaos operators according to Eqs. (10) and (11) to increase the randomness of node distribution and improve the initial solution.
-
Step 3:
Population Division and Gaussian Operators. Divide the population into male and female groups and add Gaussian operators to all individuals according to Eqs. (15) and (16). This balances the exploration and exploitation phases and enhances the search space capability.
-
Step 4:
Fitness Calculation. Calculate the population’s fitness, identify the optimal individual, and record the fitness value and the location of the optimal individual.
-
Step 5:
Calculate Food and Temperature. Calculate the amount of food Q and temperature T.
-
Step 6:
Judging Food Amount Q. If Q is less than the food threshold of 0.25, update the position using the second adaptive inertia weight factor according to Eq. (9) and recalculate fitness. If Q exceeds the food threshold, execute a different position update strategy based on the temperature T.
-
Step 7:
Judging Temperature T. If T is greater than the given temperature threshold of 0.6, the population enters foraging mode, updating individual positions based on food status and performing fitness calculations. If T is less than the threshold, continue the position update mode judgment based on population density \(\rho _l\).
-
Step 8:
Judging Population Density \(\rho _l\). If \(\rho _l>0.6\), the population enters fighting mode, combining individual positions, fighting ability, and the position of the optimal individual for position updates and adaptation calculations. If \(\rho _l \le 0.6\), the population enters reproduction mode, updating positions based on T and reproduction ability. Complete the fitness calculation and determine whether to perform individual replacement operations based on Egg.
-
Step 9:
Individual Replacement Operation. If individual replacement is not performed, proceed to Step 10. If individual replacement is performed, replace the worst individuals in the female and male populations according to Eqs. (17) and (18), recalculate the fitness of the new population and then proceed to Step 10.
-
Step 10:
Final Fitness Evaluation and Coverage Strategy Output. Compare the various behavioral patterns to calculate the population fitness value and update the global optimal fitness. Check the current iteration number i; if it is less than the total iteration number I, return to Step 4. Otherwise, the final coverage policy will be output based on global optimal fitness.
The flowchart of ACGLSOA is shown in Fig. 4.

Flowchart of ACGLSOA in STWSN.
Results and discussion
A series of simulation experiments were conducted to verify the effectiveness of ACGLSOA in improving the coverage of STWSN. The optimization results of ACGLSOA were compared with those of four other algorithms: SO, PSO, RIME, and ABC. The simulation results included node deployment location, coverage rate, and node usage efficiency. Additionally, the algorithm’s robustness was demonstrated by performing multiple simulations with different sensor nodes. All simulations were conducted on a computer equipped with an i5-9300H CPU @ 2.40GHz, and the fitness function applied in the algorithms was determined according to Eq. (7).
To better compare the performance of different algorithms in the STWSN coverage optimization process, the same population size q and iteration number I were used for all algorithms. Furthermore, each algorithm used reasonable constant threshold settings, and the values of c1, c2, c3, limit, runtime, W, d1, and d2 were adjusted to achieve the best optimization effect. This approach ensured the objectivity and fairness of the simulation experiments. The specific parameter settings of each algorithm are shown in Table 1.
In this paper, the deployment area of sensor nodes for STWSN is set as a rectangular monitoring area with length L and width W. Table 2 and Table 3 show the simulation results of the algorithm under different constraints, with all results being the average values obtained after 100 simulations. When the simulated area is 60m long and 40m wide, the sensing radius \(\rho\) of the sensor node is set to 5m. When the simulated area is 50m long and 30m wide, the sensing radius of the sensor node \(\rho\) is set to 4m. M denotes the number of sensor nodes arranged in the area. The four sets of simulation experiments apply M as 41, 36, 31, and 30, respectively.
Fig. 5 and Fig. 6 show the target area coverage curves achieved by several swarm intelligence algorithms -ACGLSOA, PSO, ABC, RIME, and SO- with different coverage areas and sensing radii. Compared to other algorithms, the results clearly show that ACGLSOA has high stability in solving the node coverage optimization problem and achieves the best coverage results when applied to STWSN.
Analyzing Fig. 5(a), when the number of nodes M is 41, distributed in an area 60m long and 40m wide, the optimized final coverage rates of ACGLSOA, PSO, ABC, RIME, and SO are 98.91%, 69.23%, 90.67%, 84.46%, and 89.17%, respectively. ACGLSOA outperforms PSO, ABC, RIME, and SO in terms of optimization results. Further analysis of the curve reveals that the initial coverage rate of PSO is 62.21%. However, the algorithm converges quickly, and the final coverage rate is only 69.23%, representing an improvement of just 7.02% from the initial state. PSO’s poor optimization result stems from its inability to fully utilize the population’s information and its lack of mechanisms to handle extreme values of individuals within the population, preventing it from escaping local optima and resulting in low convergence accuracy. The RIME algorithm starts with an initial coverage of 80.58%, but due to its weak global search capability caused by its data processing mechanism, the final coverage rate reaches only 84.46%. ABC and SO achieve better coverage results than PSO but still have issues. ABC converges faster due to its unique nectar harvesting mechanism but has some defects in global optimum search. SO, on the other hand, converges more slowly than ABC and often falls into local optima. This behaviour is due to SO’s search mechanism, which imitates snake movements and does not adequately explore the search space, relying heavily on gradual step length adjustments and positional updates. ACGLSOA enhances the global search capability and the ability to escape local optima by incorporating adaptive factors, chaos operators, Gaussian operators, and lens reflection mechanisms, ultimately achieving a network coverage of 98.91%.
When the number of nodes M is 41, distributed in an area 60m long and 40m wide, the experimental results show that the coverage achieved by ACGLSOA is improved by 9.74%, 8.24%, 14.45%, and 29.68% compared to SO, ABC, RIME, and PSO, respectively. Table 2 indicates that ACGLSOA also achieves higher node utilization efficiency, reaching 93.08%. When the number of nodes M is 41, distributed in an area 50m long and 30m wide, the experimental results show that the coverage achieved by ACGLSOA is improved by 7.33%, 7.47%, 12.20%, and 34.65% compared to SO, ABC, RIME, and PSO, respectively. Table 3 indicates that ACGLSOA also achieves higher node utilization efficiency, reaching 92.03%. These results demonstrate that the improvement methods proposed in this paper effectively enhance the performance of ACGLSOA, providing higher adaptability, a more vital ability to escape local optima, a more comprehensive global search strategy, and ultimately forming a more reasonable and adequate coverage scheme.

Iteration curves with different number of nodes under the condition of 60m length and 40m width.

Iteration curves with different number of nodes under the condition of 50m length and 30m width.
Figure 7 represents the coverage of the sensor network in the target area after applying five optimization algorithms under the constraints of nodes M is 41, distributed in an area 60m long and 40m wide. Fig. 7(a) and (b) show the initial coverage effects of ACGLSOA and PSO, respectively. The initial nodes designed by ACGLSOA are more evenly distributed, with many nodes positioned along the boundary of the target area and a uniform sensor deployment in the center. However, there are still overlapping sensing areas. Conversely, the initial nodes designed by the PSO algorithm exhibit poor uniformity, with many nodes overlapping in neighboring spatial locations, resulting in significant coverage redundancies and unmonitored areas. These redundancies waste sensor node resources and increase network deployment costs.
Figures 7(c)-(g) depict the final coverage of STWSN after optimization. Figure 7(d) shows that, even after PSO optimization, there are still uncovered spaces and coverage redundancies. In contrast, Fig. 7(c), (e), (f), and (g) demonstrate that ACGLSOA, ABC, RIME, and SO achieve better results in optimizing STWSN node locations. Specifically, the network optimized by ACGLSOA achieves the highest coverage, approaching 99%, compared to PSO, ABC, RIME, and SO results. The final node distribution with ACGLSOA is more uniform, with fewer coverage redundancies and unmonitored areas, indicating a more efficient and effective optimization.

Optimization results of the algorithm under the conditions of 60m length, 40m width and 41 nodes.
Figure 8(a)-(e) presents the coverage results of STWSN in the target area after the optimization of five algorithms under the constraints of nodes M is 41, distributed in an area 60m long and 40m wide. Figure 8(a) demonstrates that the coverage achieved by ACGLSOA remains high even with a reduced number of sensor nodes. Comparing Fig. 8(a) with Fig. 8(b)-(e) reveals that the nodes optimized by ACGLSOA are more uniformly distributed, with fewer coverage redundancies and unmonitored areas. Additionally, comparing Fig. 7(c) with Fig. 8(a) shows no significant change in the optimization effect of ACGLSOA, regardless of the same target area size and node sensing distance conditions. Consequently, the economic cost of node optimization for STWSN using ACGLSOA is lower.

Optimization results of the algorithm under the conditions of 50m length, 30m width and 31 nodes.

Trends in coverage of STWSN.
Figure 9 illustrates the relationship between the coverage of sensor nodes and the number of nodes in the target area after optimization by the five algorithms: ACGLSOA, PSO, ABC, RIME, and SO, under nodes distributed in an area 60m long and 40m wide. Analyzing Fig. 9, it is evident that the coverage range of STWSN exhibits a linear relationship with the number of sensor nodes. As the number of sensor nodes increases in the monitoring area, the coverage effect improves, resulting in a higher coverage rate. When the number of sensor nodes is the same, ACGLSOA achieves a more extensive coverage range than PSO, ABC, RIME, and SO. Additionally, ACGLSOA demonstrates excellent coverage optimization performance under the same sensor parameters with varying numbers of nodes. In the monitoring area, increased sensor node coverage signifies more comprehensive monitoring, a more reliable system, and higher resource utilization. Therefore, the increased coverage indicates that ACGLSOA effectively optimizes STWSN coverage.
Figure 10 shows the sensor node usage efficiency versus the number of sensor nodes optimized by the five algorithms ACGLSOA, PSO, ABC, RIME, and SO-under nodes distributed in an area 60m long and 40m wide. Analysis of Fig. 10 reveals that sensor node usage efficiency is linearly correlated with the number of application nodes. The more nodes present in the region, the smaller the node usage efficiency. For instance, when the number of nodes used is 21, the node usage efficiency after ACGLSOA optimization is 98.29%. However, when the number of nodes increases to 41, the node usage efficiency drops to 66.95%. A similar trend is observed with other optimization algorithms. The greater the number of nodes, the smaller the usage efficiency. This reduction in efficiency is due to the Boolean disk-type sensor model deployed in a rectangular area. When aiming for a larger coverage area, there might be some redundancy in the sensing areas of sensor nodes, leading to the waste of sensor resources and thus decreasing node usage efficiency.
For example, when 21 nodes are used, the node usage efficiency after PSO optimization is 61.39%, RIME optimization reaches 75.41%, and SO is similar to the ABC optimization results, which are 89.12% and 88.66%, respectively. Comparing the optimization results, it is evident that the sensor node usage efficiency after ACGLSOA optimization is significantly higher than the results of the other four algorithms. Additionally, across different numbers of nodes, the node usage efficiency with ACGLSOA optimization remains consistently higher. Higher node usage efficiency in the monitoring area indicates greater resource utilization, demonstrating that ACGLSOA can effectively enhance node usage efficiency in STWSN.

Trends in node utilization efficiency.
Statistical significance analysis
To further validate the superiority of the proposed ACGLSOA algorithm over other algorithms, statistical significance tests were conducted on the coverage rate and node utilization efficiency results. The Student’s t-test was employed to evaluate whether the mean performance of ACGLSOA differs significantly from that of the other algorithms.
Let \(\mu _A\) and \(\mu _B\) denote the true means of the performance metric (coverage rate or node utilization) for ACGLSOA and another algorithm B, respectively. The null and alternative hypotheses are formulated as:
The t-statistic is calculated using the following equation:
where \(\bar{x}_A\), \(s_A^2\), and \(n_A\) are the sample mean, variance, and size for ACGLSOA, and \(\bar{x}_B\), \(s_B^2\), and \(n_B\) are the corresponding values for algorithm B.
The calculated t-statistic is compared against the critical t-value at a significance level of 0.05 to determine if the null hypothesis can be rejected. If the calculated t-statistic exceeds the critical value, it indicates a statistically significant difference between the means of ACGLSOA and the other algorithm, which can be expressed as:
The data used in Table 4 are the algorithm data obtained after 100 rounds of simulation tests. The t-test results shown in Table 4 confirm that the detection point considered in the experiment is 60 meters long and 40 meters wide. The sensor sensing radius is 5m , compared with the detection point, which is 50 meters long and 30 meters wide, and the sensor sensing radius is 4 m. When the number of sensing nodes is set to 41, the proposed ACGLSOA algorithm’s performance in terms of node coverage and utilization efficiency was compared with several benchmark algorithms (SO, ABC, RIME, and PSO). A t-test was conducted to obtain t-values and the corresponding p-values for each comparison. Results indicate that the p-values for comparisons between ACGLSOA and each benchmark algorithm were significantly below 0.05, demonstrating that the ACGLSOA algorithm outperforms the comparative algorithms with a statistically significant difference. ACGLSOA effectively accomplishes the goal of maximizing the coverage of the target area while increasing node utilization efficiency.
Conclusions
This paper presents an innovative Adaptive Chaotic Gaussian Lens Snake Optimization Algorithm (ACGLSOA) to enhance network coverage and node utilization within Soil Temperature Wireless Sensor Networks (STWSNs) for cotton fields. ACGLSOA integrates a chaotic operator in the population initialization phase, boosting solution diversity and enabling refined initialization. During the population division phase, a newly developed Gaussian operator enriches individual diversity and enhances spatial search capabilities. Adaptive factors are introduced in the iterative phase to accelerate convergence and improve local search efficiency, while a lens reflection mechanism is implemented in the reproduction phase, significantly broadening the population’s search range and strengthening global search capabilities to maximize the likelihood of achieving optimal solutions. The algorithm’s effectiveness was verified through comparisons with SO, PSO, RIME, and ABC algorithms, where simulation results show that ACGLSOA achieves superior performance with a maximum coverage range of 98.91% and a maximum node utilization efficiency of 93.1%, highlighting its remarkable advantage in STWSN coverage optimization.
Although ACGLSOA showed strong performance in the simulated environment, there are still areas for further improvement. Future research will design the soil temperature wireless sensor node to meet the software burn-in requirements and actual farmland deployment requirements. After completing the hardware design, the algorithm proposed in this paper will be combined with the hardware and deployed to the cotton field for data collection and field testing. The algorithm will be evaluated according to the amount of collected data and the coverage area to evaluate the algorithm’s effectiveness in the actual environment. The algorithm will be further improved and adjusted. In addition, to meet the needs of different applications and the usage requirements of multiple application scenarios, combining multiple types of temperature sensors with different sensing radii will be explored to support collaborative monitoring. Mobility will also be introduced for sensor nodes to enable dynamic monitoring and data transmission. The research will further focus on adapting the sensor sensing methodology to achieve three-dimensional spatial coverage, increase sensor density in the monitoring area, and facilitate the coordinated operation of multiple sensors. These future improvements will expand the adaptability and application potential of the algorithm in various agricultural and environmental scenarios.
Data availability
The datasets generated during this current study are not publicly available due to privacy, but are available from the corresponding author on reasonable request.
References
Gulati, K. et al. A review paper on wireless sensor network techniques in internet of things (iot). Mater. Today Proc. 51, 161–165 (2022).
Rejeb, A., Rejeb, K., Abdollahi, A., Al-Turjman, F. & Treiblmaier, H. The interplay between the internet of things and agriculture: A bibliometric analysis and research agenda. Internet Things 19, 100580 (2022).
Ojha, T., Misra, S. & Raghuwanshi, N. S. Internet of things for agricultural applications: The state of the art. IEEE Internet Things J. 8, 10973–10997 (2021).
Wu, Y., Jin, P., Zhang, Y., Cai, T. & Ji, Y. Coverage quality optimization strategy for static heterogeneous wireless sensor networks. In 2023 International Conference on Ambient Intelligence, Knowledge Informatics and Industrial Electronics (AIKIIE), 1–6 (IEEE, 2023).
Agrawal, A., Bakshi, B. R., Kodamana, H. & Ramteke, M. Multi-objective optimization of food-energy-water nexus via crops land allocation. Comput. Chem. Eng. 183, 108610 (2024).
Jha, S. K. et al. Quality-of-service-centric design and analysis of unmanned aerial vehicles. Sensors 22, 5477 (2022).
Kumar, V. & Rathore, R. S. Security issues with virtualization in cloud computing. In 2018 International Conference on Advances in Computing, Communication Control and Networking (ICACCCN), 487–491 (IEEE, 2018).
Guilmeau, T., Chouzenoux, E. & Elvira, V. Simulated annealing: A review and a new scheme. In 2021 IEEE Statistical Signal Processing Workshop (SSP), 101–105 (IEEE, 2021).
Su, H. et al. Rime: A physics-based optimization. Neurocomputing 532, 183–214. https://doi.org/10.1016/j.neucom.2023.02.010 (2023).
Shami, T. M. et al. Particle swarm optimization: A comprehensive survey. IEEE Access 10, 10031–10061 (2022).
Hashim, F. A., Houssein, E. H., Hussain, K., Mabrouk, M. S. & Al-Atabany, W. Honey badger algorithm: New metaheuristic algorithm for solving optimization problems. Math. Comput. Simul. 192, 84–110. https://doi.org/10.1016/j.matcom.2021.08.013 (2022).
Liu, H. et al. Coverage optimization of mobile sensor networks based improved beetle antennae search algorithm. In 2021 4th IEEE International Conference on Industrial Cyber-Physical Systems (ICPS), 786–790 (IEEE, 2021).
Revathi, A. & Santhi, S. Coverage optimization using fuzzy and artificial bee colony algorithm in wireless sensor networks. In 2023 First International Conference on Advances in Electrical, Electronics and Computational Intelligence (ICAEECI), 1–7 (IEEE, 2023).
Cao, L., Yue, Y., Cai, Y. & Zhang, Y. A novel coverage optimization strategy for heterogeneous wireless sensor networks based on connectivity and reliability. IEEE Access 9, 18424–18442 (2021).
Lloret, J., Sendra, S., Garcia, L. & Jimenez, J. M. A wireless sensor network deployment for soil moisture monitoring in precision agriculture. Sensors 21, 7243 (2021).
Priyadarshi, R., Gupta, B. & Anurag, A. Wireless sensor networks deployment: A result oriented analysis. Wirel. Pers. Commun. 113, 843–866. https://doi.org/10.1007/s11277-020-07255-9 (2020).
Ammari, H. M. A computational geometry-based approach for planar k-coverage in wireless sensor networks. ACM Trans. Sens. Netw. 19, 1–42. https://doi.org/10.1145/3564272 (2023).
Amutha, J., Sharma, S. & Nagar, J. Wsn strategies based on sensors, deployment, sensing models, coverage and energy efficiency: Review, approaches and open issues. Wirel. Pers. Commun. 111, 1089–1115 (2020).
Rathore, R. S. et al. Hybrid wgwo: whale grey wolf optimization-based novel energy-efficient clustering for eh-wsns. EURASIP J. Wirel. Commun. Netw. 2020, 1–28 (2020).
Singh, A., Prakash, S. & Singh, S. Optimization of reinforcement routing for wireless mesh network using machine learning and high-performance computing. Concurr. Comput. 34, e6960 (2022).
Singh, A., Sharma, S. & Singh, J. Nature-inspired algorithms for wireless sensor networks: A comprehensive survey. Comput. Sci. Rev. 39, 100342 (2021).
Molina, D. et al. Comprehensive taxonomies of nature-and bio-inspired optimization: Inspiration versus algorithmic behavior, critical analysis recommendations. Cogn. Comput. 12, 897–939 (2020).
Abualigah, L. et al. Aquila optimizer: a novel meta-heuristic optimization algorithm. Comput. Ind. Eng. 157, 107250 (2021).
Gen, M. & Lin, L. Genetic algorithms and their applications. In Springer handbook of engineering statistics, 635–674 (Springer, 2023).
Jia, H.-D. et al. Hybrid algorithm optimization for coverage problem in wireless sensor networks. Telecommun. Syst. 80, 105–121 (2022).
Chen, J. et al. Coverage path planning of heterogeneous unmanned aerial vehicles based on ant colony system. Swarm Evol. Comput. 69, 101005 (2022).
Mohar, S. S., Goyal, S. & Kaur, R. Localization of sensor nodes in wireless sensor networks using bat optimization algorithm with enhanced exploration and exploitation characteristics. J. Supercomput. 78, 11975–12023 (2022).
Luo, Y. & Hu, Y. The coverage improvement of the wireless sensor network based on the parameters optimized honey badger algorithm. IEEE Access 11, 108617–108639. https://doi.org/10.1109/access.2023.3320931 (2023).
Wang, J., Liu, Y., Rao, S., Zhou, X. & Hu, J. A novel self-adaptive multi-strategy artificial bee colony algorithm for coverage optimization in wireless sensor networks. Ad Hoc Networks 150, 103284 (2023).
Liu, X., Tian, M., Zhou, J. & Liang, J. An efficient coverage method for semwsns based on adaptive chaotic gaussian variant snake optimization algorithm. Math. Biosci. Eng. 20, 3191–3215. https://doi.org/10.3934/mbe.2023150 (2023).
Liang, J., Tian, M., Liu, Y. & Zhou, J. Coverage optimization of soil moisture wireless sensor networks based on adaptive cauchy variant butterfly optimization algorithm. Sci. Rep. 12, 11687 (2022).
Deepa, R. & Venkataraman, R. Enhancing whale optimization algorithm with levy flight for coverage optimization in wireless sensor networks. Comput. Electr. Eng. 94, 107359 (2021).
Nematzadeh, S., Torkamanian-Afshar, M., Seyyedabbasi, A. & Kiani, F. Maximizing coverage and maintaining connectivity in wsn and decentralized iot: an efficient metaheuristic-based method for environment-aware node deployment. Neural Comput. Appl. 35, 611–641 (2023).
Singh, A., Sharma, S. & Singh, J. Nature-inspired algorithms for wireless sensor networks: A comprehensive survey. Comput. Sci. Rev. 39, 100342 (2021).
Osamy, W., Khedr, A. M., Salim, A., Al Ali, A. I. & El-Sawy, A. A. Coverage, deployment and localization challenges in wireless sensor networks based on artificial intelligence techniques: a review. IEEE Access 10, 30232–30257 (2022).
Hashim, F. A. & Hussien, A. G. Snake optimizer: A novel meta-heuristic optimization algorithm. Knowledge-Based Syst. 242, https://doi.org/10.1016/j.knosys.2022.108320 (2022).
Acknowledgements
This paper was supported by the National Key R&D Program of China (Grant No.: 2022ZD0115800), the Shihezi City Financial Science and Technology Program Projects(Grant No.: 2023NY01-03), the National Natural Science Foundation of China (Grant No.: 61962053), the Scientific Research Start-up Fund for High-level Talents of Shihezi University (Grant No.: RCZK202312), and the Key Laboratory of Modern Agricultural Machinery of Xinjiang Production and Construction Corps.
Author information
Authors and Affiliations
Contributions
C.B. and M.T. conceived and designed the study. C.B. and X.L. performed the experiments. C.B. and R.X. wrote the paper. C.B., Z.L. and J.Z. reviewed and edited the manuscript. All authors read and approved the manuscript.
Corresponding author
Ethics declarations
Competing interests
The authors declare no competing interests.
Additional information
Publisher’s note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
Open Access This article is licensed under a Creative Commons Attribution-NonCommercial-NoDerivatives 4.0 International License, which permits any non-commercial use, sharing, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons licence, and indicate if you modified the licensed material. You do not have permission under this licence to share adapted material derived from this article or parts of it. The images or other third party material in this article are included in the article’s Creative Commons licence, unless indicated otherwise in a credit line to the material. If material is not included in the article’s Creative Commons licence and your intended use is not permitted by statutory regulation or exceeds the permitted use, you will need to obtain permission directly from the copyright holder. To view a copy of this licence, visit http://creativecommons.org/licenses/by-nc-nd/4.0/.
About this article

Cite this article
Ban, C., Liu, X., Tian, M. et al. Adaptive chaotic gaussian lens snake optimization algorithm for improved cotton field sensor coverage and utilization. Sci Rep 15, 22766 (2025). https://doi.org/10.1038/s41598-025-04213-y
Received:
Accepted:
Published:
Version of record:
DOI: https://doi.org/10.1038/s41598-025-04213-y
