
Abstract
The current manuscript deals with the analytical study of the generalized Benjamin-Ono (BO) equation. The underlying model has numerous applications in scientific fields like wave propagation effect and study of the plasma dynamics and complicated modeling of physical systems. The Jacobi elliptic function (JEF) expansion method is employed for employed for the solitary wave and soliton solutions for the underlying model. This technique provides dark, bright and dark periodic solitary wave solutions. Different solutions are chosen to draw their physical behavior. 2D, 3D and their corresponding contours are drawn and their physical behavior is explained in the context of real-life application. The stability analysis, chaotic behavior, sensitivity and bifurcation analysis is derived to analyze its various dynamics and simulations are plotted for various choices of the parameters. These results will create an impact in the existing literature.
Similar content being viewed by others


Introduction
Nonlinear partial differential equations (NLPDEs) are essential for investigating intricate nonlinear events in various scientific fields, including solid-state physics, plasma physics, and condensed matter physics. Significant improvements have been made in the study of these equations over time. Numerous computational techniques have been developed in the literature to investigate the properties of solutions1. In a deep ocean, the rotation-modified BO equation is used to study the interaction between a single wave and a long background periodic wave. Grimshaw et al. determined stationary and non-stationary solutions for BO solitons caught in a long sinusoidal wave using a multiple scales approach. However, in a quasi-random wave field, the coherent structure and energy dispersion are eventually destroyed due to the soliton’s feedback on the background wave. The soliton dynamic’s distinctive parameters are estimated for actual oceanic circumstances2.
In order to explore certain physical interpretations for the Cahn–Hilliard system solutions, the unified method is introduced. These solutions are of the polynomial type and have various geometrical structures, including conoidal soliton, bright-dark, and M-type solutions3. Tarla et al. investigated the perturbed Chen-Lee-Liu equation with the help of JEF expansion method. Tarla et al. obtained solitary wave solutions such as dark-bright, trigonometric, exponential, hyperbolic, periodic, and singular soliton solutions4. Osman et al. worked on the coupled Schrödinger–Boussinesq equation with variable-coefficients to explored the nonautonomous complex wave solutions5, also the multiwave solutions of time-fractional (2+ 1)-dimensional Nizhnik–Novikov–Veselov equations6. Akbar et al. constructed the solitons for the shallow water waves and superconductivity models7, Nisar et al. considered the biological population model to explored the solitary wave solutions8. Umar et al. worked on the 2D generalized kadomtsev–petviashvili equation to gained the Hirota D-operator forms, multiple soliton waves, and other nonlinear patterns9.
Arafat et al. used the modified Kudryashov technique and the (2 + 1)-dimensional Konopelchenko-Dubrovsky model to derive traveling wave solutions (TWSs), which are represented as several wave profiles such as W-shape, bell shape, anti-bell shape, and kink shape10,11,12. The Kadomtsev-Petviashvili and Calogero-Degasperis equation models are investigated by Islam and Basak, using the improved F-expansion approach. It reveals visually appealing TWSs in hyperbolic and rational functions as well as kink, dark, periodic, and v-shape13. Dey et al. obtained the solitons for the generalized (3+ 1)-dimensional shallow water-like equation using the \((\phi '/\phi , 1/\phi )\)-expansion method14. Khan et al. considered the two distinct equations: the (1+ 1)-dimensional cKdV–mKdV equation and the sinh-Gordon equation to explored the traveling wave solutions15.
The extended Fan-sub equation technique and the Biswas-Arshed equation are applied by Bilal and Ahmad (2022) to study optical pulses in birefringent fibers. It generates hyperbolic, singular periodic waves and JEF solutions and recovers several shapes of optical pulses, such as bright, dark, singular, bright-dark, and dark-singular solitons16. Bilal et al. (2021) introduced novel integration norms such as the \((\frac{G'}{G^{2}})\)-expansion method and the expansion function technique to achieve solutions such as shock, singular, shock-singular, and singular periodic waves for the Gilson-Pickering equation in plasma physics17. Khan et al. employed an improved JEF method for the improved modified kortwedge-de vries equation18.
Benjamin19 and Ono20 presented the well-known BO equation that models the propagation of long internal waves in stratified fluids. The equation is integrable. Originally developed to simulate waves in shallow water, the BO equation has applications in fluid dynamics, nonlinear optics, and plasma physics. Because the generalized equation has many non-linear components, multiple non-linear phenomena become accessible. Because of its numerous and relevant physical applications, the generalized BO equation has been extensively studied. The BO equation, which was created by Benjamin19, Ono20, Davis and Acrivos21 serves as a model for how waves change in deep sea. It is a dispersive equation that has been researched extensively, and its solutions are well understood22,23,24. The BO equation was chosen as the first application for a numerical method due to its lower cost of evolution compared to vortex sheets or water waves. It shares features with these types, such as non-locality through the Hilbert transform and Birkhoff-Rott integral. Numerical simulation demonstrates a rich variety of nontrivial time-periodic solutions that connect traveling waves of various wavelengths and speeds like rungs in a ladder. These solutions produce or eliminate oscillatory humps, which gradually increase or decrease in size until they are incorporated into the stationary wave. The dynamics of these solutions are frequently interesting, which resemble low-amplitude traveling waves or interacting solitons passing through or bouncing off each other25. The (2+1)-dimensional generalized BO equation26, which is expressed as follows
where \(c_{1},\) \(c_{2},\) \(c_{3},\) and \(c_{4}\) stand for arbitrary constants. The generalized BO equation serves numerous scientific fields through its ability to model wave propagation analysis in optical fiber communications while advancing communication system designs. Plasma physics depends on the generalized BO equation to study wave behavior in plasma systems because such knowledge finds application in condensed matter physics for describing particular types of material waves that enhance understanding complex physical behaviors. Through the generalized BO equation, the system delivers essential operational functionality as its core instrument to solve various challenges in multiple domains.
The extended direct algebraic method27, \(\left( \frac{G'}{G},\frac{1}{G}\right)\)-expansion technique28, sub-ordinary differential equations method29, Bilinear method30, generalized Kudryashov method31, extended sinh-Gordon equation expansion method32, the unified method33, Bilinear neural network technique34,35, the Darboux transformations method36, the new extended hyperbolic function method and the Sine-Gordon equation expansion method37, \(\phi ^6\)-model expansion method38, new extended direct algebraic method39, the generalized exponential rational function technique40,41, the generalized Riccati equation mapping approach42, and the Weierstrass elliptic function method43 are a few of the well-known techniques. These methods are used to investigate a variety of solutions, like peaks, bright and dark solitons, and more. Nonlinear optics is a place where these solutions are sought, where the unique wave has the same shape as they travel, as a result of a fine balance between nonlinear and dispersion44. But in this study we considered the JEF approach. The advantages of this is approach is easy to compute and the results are better then others in the form of both solitary waves and soliton solutions. The JEF method proves itself as an efficient analytical method to discover exact solutions of NLPDEs. The JEF method has successfully obtained solutions to several nonlinear equations, among which are Sine-Gordon, nonlinear Schrodinger, and Korteweg-de Vries (KdV). This approach provides the periodic and solitary wave solutions that improve the comprehension of non-linear wave behavior. But the limitations and the disadvantages of this method is only that, which is not applicable for all types of the NLPDEs. This is only applied to the even order ordinary differential equations. Moreover, the JEF method facilitates the derivation of periodic wave solutions that are of significant interest in physical models exhibiting nonlinear oscillatory behavior. Its algebraic formulation is particularly amenable to symbolic computation, enhancing both the efficiency and tractability of obtaining exact solutions. These attributes make the JEF method an effective and elegant tool for exploring nonlinear wave phenomena in various branches of applied mathematics and physics.
The main novelty of this study is to explore the exact solitary wave solutions for the generalized BO model along with the dynamical analysis and modulation instability analysis. For the analytical results, the JEF expansion method is used to explore various types of solitons and solitary wave solutions like dark, bright, dark-bright, singular, and other mixed solitons with solitary wave solutions. The Galilean transformation is used to convert the system into a planar dynamical system to explore the bifurcation and sensitivity analysis of the model. Lastly, the modulation instability is also derived along with the physical representation as well.
Methodology
The description of the JEF expansion method is described in this section. To pursue these studies, the following procedures will be executed45,46,47:
Step 1: The mathematical form of the NPDEs is usually as follows
Step 2: Using the chain rule and converting \(eq.(2)\)
where \(\eta =ax+by-\gamma t\). \(eq.(2)\) was transformed into an ordinary differential equation (ODE) by the given following form with modification in \(eq.(3)\)
the general form of ODE is considered as
The principal aim of this approach is to improve the capacity to solve an auxiliary ODE, which is the first kind of three-parameter Jacobian equation,
where \(\chi '\) = \(\frac{d\chi }{d\eta }\), \(\eta\) = \(\eta (x, t)\) and L, M, & N are constants. \(eq.(6)\)’s solution is found in JEF18. \(sn \eta\) = \(sn(\eta ,\rho )\), \(cn \eta\) = \(cn(\eta ,\rho )\) and \(dn \eta\) = \(dn(\eta ,\rho )\) are the Jacobi elliptic functions (JEFs), and \(\rho\)(0 < \(\rho\) < 1) is the modulus. The following are some characteristics of the double periodic elliptic functions
Since JEFs, which are presented in JEF18, were reduced to hyperbolic and trigonometric functions in the restrictive sense for \(\rho \rightarrow 0\) and \(\rho \rightarrow 1\), we used the JEF expansion technique to find trigonometric function and soliton solutions to the problem, denoting \(u(\eta )\) as a finite series of JEFs.
\(\chi (\eta )\) is the solution to nonlinear ordinary \(eq.(6)\), using the constants m and \(a_{j}(j = 0,1,2,...,m)\) that we obtained later. The highest order linear term in \(eq.(7)\) can be used to determine the integer m.
Thus, the nonlinear terms of the highest order are
Equation 7 is used to solve the nonlinear algebraic equations system for \(a_{j}(j = 0, 1, 2,..., m)\), by adjusting all of the coefficients of powers \(\chi\) to zero. Wolfram Mathematica 11.1 is used to solve the system and display the values for A, B, and C of \(eq.(6)\) in JEF18, allowing for exact solutions for \(eq.(2)\).
Solutions of the generalized Benjamin-Ono equation
Considered the wave transformation as
\(u(x,y,t)=\phi (\eta )\), where \(\eta =ax+by-\gamma t\).
Taking the derivatives and submit into the \(eq.(1)\) and get the ODE as
By taking integration of eq.(2), we have
After resolving the nonlinear term \(\phi ''\) and the highest-order derivative term \(\phi ^{2}\) in \(eq.(10)\), we apply homogeneous balancing principle. By this procedure, we obtain \(n = 2\). The solution of \(eq.(10)\) is then written of the form:
Taking the derivatives of the \(eq.(12)\) along with \(eq.(6)\) into \(eq.(11)\) and get
by collecting various powers of \(\chi (\eta )\), we obtained:
The above mentioned system (14) is solved using Wolfram Mathematica 11.1, now the coefficient values are as follows:
The exact solution of \(eq.(1)\) was obtained by applying the previously defined solution approach.
Case 1: When we select L= \(\rho ^{2}\), M= \(-(1+\rho ^{2})\), N= 1, \(\chi (\eta )\)= \(sn(\eta )\) from JEF18, the solution is:
from JEF18, suppose \(\rho \rightarrow 1\), the solution obtained as:
Case 2: Setting A= \(-\rho ^{2}\), B= \(2\rho ^{2}-1\), C= \(1-\rho ^{2}\), it conclude from JEF18, \(\chi (\eta )\)= \(cn(\eta )\), the periodic solution expressed as:
if \(\rho \rightarrow 1\), from JEF18, we get:
Case 3: Choosing L= −1, M= \(2-\rho ^{2}\), N= \(\rho ^{2}-1\), from JEF18, gives \(\chi (\eta )\)= \(dn(\eta )\), we obtained the periodic solution as
from v, for \(\rho \rightarrow 1\), the solution is similar to \(eq.(21)\).
Case 4: Supposing L= 1, M= \(-(1+\rho ^{2})\), N= \(\rho ^{2}\), from JEF18, gives \(\chi (\eta )\)= \(ns(\eta )\), then obtained the periodic solution as
furthermore, from JEF18, for \(\rho \rightarrow 1\), the solution is expressed as:
from JEF18, if \(\rho \rightarrow 0\), \(eq.(1)\)’s solution is written as:
Case 4(ii): Supposing L= 1, M= \(-(1+\rho ^{2})\), M= \(\rho ^{2}\), from JEF18, \(\chi (\eta )\)= \(dc(\eta )\)
for \(\rho \rightarrow 0\), by JEF18, \(eq.(1)\)’s solution is written as:
Case 5: While L= \(1-\rho ^{2}\), M= \(2\rho ^{2}-1\), N= \(-\rho ^{2}\), from JEF18, gives \(\chi (\eta )\)= \(nc(\eta )\), then the periodic solution is expressed as
and for \(\rho \rightarrow 0\), from JEF18, solution of \(eq.(1)\) is determined as:
Case 6: Supposing L= \(\rho ^{2}-1\), M= \(2-\rho ^{2}\), N= \(-1\), from JEF18, this relates to \(\chi (\eta )\)= \(nd(\eta )\), so
is found and if \(\rho \rightarrow 0\), then from JEF18, the solution obtained as:
Case 7: Assuming L= \(1-\rho ^{2}\), M= \(2-\rho ^{2}\), N= 1, from JEF18, and \(\chi (\eta )\)= \(sc(\eta )\), we get
and if \(\rho \rightarrow 0\), then from JEF18, the solution is given as:
Case 9: Assigning L= 1, M= \(2-\rho ^{2}\), N= \(1-\rho ^{2}\), from JEF18, and \(\chi (\eta )\)= \(cs(\eta )\), the solution determined as
from JEF18, if \(\rho \rightarrow 1\), then the solution is represented as:
also for \(\rho \rightarrow 0\), from JEF18, the solution we have:
Case 10: Assigning L= 1, M= \(2\rho ^{2}-1\), N= \(\rho ^{2}(1-\rho ^{2})\), from JEF18, and \(\chi (\eta )\)= \(ds(\eta )\), the solution is determined as
for \(\rho \rightarrow 1\), the solution is same as \(eq.(35)\), and if \(\rho \rightarrow 0\), from JEF18, the solution is alike \(eq.(25)\).
Case 11: Considering L= \(\frac{-1}{4}\), M= \(\frac{\rho ^{2}+1}{2}\), N= \(\frac{-(1-\rho ^{2})^{2}}{4}\), from JEF18, and \(\chi (\eta )\)= \(\rho cn\pm dn\), the solution is determined as
additionally for \(\rho \rightarrow 1\), the solution is
Case 12: When L= \(\frac{1}{4}\), M= \(\frac{-2\rho ^{2}+1}{2}\), N= \(\frac{1}{4}\), from JEF18, and \(\chi (\eta )\)= \(ns\pm cs\), the solution appeared as
furthermore,if \(\rho \rightarrow 1\), the solution evaluated as
also for \(\rho \rightarrow 0\), the solution
is obtained.
Case 13: Taking L= \(\frac{1-\rho ^{2}}{4}\), M= \(\frac{\rho ^{2}+1}{2}\), N= \(\frac{1-\rho ^{2}}{4}\), from JEF18, and \(\chi (\eta )\)= \(nc\pm sc\), the solution gets
if \(\rho \rightarrow 0\), acquiring solution as
Case 14: Setting L= \(\frac{1}{4}\), M= \(\frac{\rho ^{2}-2}{2}\), N= \(\frac{\rho ^{2}}{4}\), by JEF18, this \(\chi (\eta )\)= \(ns\pm ds\), results
for \(\rho \rightarrow 0\), solution gets
and for \(\rho \rightarrow 1\) the results is similar to \(eq.(41)\).
Case 15: If we set L= \(\frac{\rho ^{2}}{4}\), M= \(\frac{\rho ^{2}-2}{2}\), N= \(\frac{\rho ^{2}}{4}\), JEF18, due to the setting \(\chi (\eta )\)= \(sn\pm icn\), the equation results
so for \(\rho \rightarrow 1\), from JEF18, the solution can
Case 16: Taking L= \(\frac{1}{4}\), M= \(\frac{1-2\rho ^{2}}{2}\), N= \(\frac{1}{4}\), from JEF18, \(\chi (\eta )\)= \(\rho cn\pm idn\), the solution can be found as
from JEF18, for \(\rho \rightarrow 1\), the solution is
Case 16(ii): Supposing L= \(\frac{1}{4}\), M= \(\frac{1-2\rho ^{2}}{2}\), N= \(\frac{1}{4}\), from JEF18, \(\chi (\eta )\)= \(\frac{sn}{1\pm cn}\), the solution can be expressed as
for \(\rho \rightarrow 1\), from JEF18, we have
also for \(\rho \rightarrow 0\), the periodic solution we have
Case 17: Considering L= \(\frac{\rho ^{2}}{4}\), M= \(\frac{\rho ^{2}-2}{2}\), N= \(\frac{1}{4}\), from JEF18, we have \(\chi (\eta )\)= \(\frac{sn}{1\pm dn}\), the solution is written as
for \(\rho \rightarrow 1\), the solution is identical to \(eq.(52)\).
Case 19: From JEF18, regarding L= \(\frac{1-\rho ^{2}}{4}\), M= \(\frac{\rho ^{2}+1}{2}\), N= \(\frac{-\rho ^{2}+1}{4}\), \(\chi (\eta )\)= \(\frac{cn}{1\pm sn}\), so the solution is obtained as
if we set \(\rho \rightarrow 0\), we have the periodic solution
Case 20: By JEF18, Taking L= \(\frac{(1-\rho ^{2})^{2}}{4}\), M= \(\frac{\rho ^{2}+1}{2}\), N= \(\frac{1}{4}\), and \(\chi (\eta )\)= \(\frac{sn}{dn\pm cn}\), so the solution is evaluated as
for \(\rho \rightarrow 0\), the solution is obtained as twin of \(eq.(53)\).
Case 21: Since L= \(\frac{\rho ^{2}}{4}\), M= \(\frac{\rho ^{2}-2}{2}\), N= \(\frac{1}{4}\), from JEF18, we have \(\chi (\eta )\)= \(\frac{cn}{\sqrt{1-\rho ^{2}\pm dn}}\), so the solution is
for \(\rho \rightarrow 1\), the solution is given as
The exploration of bifurcation analysis, chaotic behavior, and sensitivity analysis
Bifurcation analysis
In this section, \(eq.(1)\) will be evaluated using bifurcation theory. Bifurcation happens when slight modifications to the parameters of a dynamic system result in qualitative alterations in the system’s behavior. It frequently results in chaotic behavior, periodic orbits, or novel stable states. Bifurcation theory makes it easier to comprehend these abrupt changes and forecast how the system will behave at various points in time. \(eq.(11)\) may be represented as a planar dynamic system through the Galilean transformation51,52,53,54.
Where \(s_{1}=\frac{\gamma ^{2}c_{1}}{a^{4}}-\frac{c_{2}\gamma }{a^{3}}+\frac{c_{3}b}{a^{3}}\) and \(s_{2}=\frac{c_{4}}{a^{2}}\). This system is Hamiltonian and has the following integral.
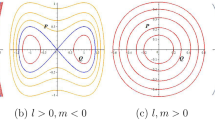
Here, h also known as the energy level or Hamiltonian constant, is an integral constant. It is sometimes referred to as the total energy or energy integral. However, \(\frac{z^{2}}{2}\) shows the kinetic energy and \(s_{1}\frac{u^{2}}{2}+s_{2}\frac{u^{3}}{3}\) represents the potential energy of the Hamiltonian system. (0, 0) and \((0,-\frac{s_{1}}{s_{2}})\) on the u-axis are two equilibrium points for the given differential equations. The graphical behavior of the bifurcation analysis is represented in Figure (1) and the subfigures (1a,1b,1c,1d) are discuss below.
Case-1: When we choose \(s_1>0\) and \(s_2<0\) then the center point (Stable) at (0,0) and a saddle exists at \((0,-\frac{s_{1}}{s_{2}})\) which shows in subfigure 1a.
Case-2: When we choose \(s_1>0\) and \(s_2>0\) then at (0, 0) is center (stable) at origin and \((0,-\frac{s_{1}}{s_{2}})\) shows the saddle point (unstable) shows in subfigure 1b.
Case-3: When we choose \(s_1<0\) and \(s_2<0\) then at (0, 0) is center (stable) at origin and \((0,-\frac{s_{1}}{s_{2}})\) shows the saddle point (unstable) shows in subfigure 1c.
Case-4: When we choose \(s_1<0\) and \(s_2>0\) then at (0, 0) is center (stable) at origin and \((0,-\frac{s_{1}}{s_{2}})\) shows the saddle point (unstable) shows in subfigure 1d.

The figure represents the phase portraits of the systems bifurcation with different parameter values.
Chaotic behavior
We investigate if chaotic behavior48 exists in the resultant system eq.(60) by adding a perturbed term. For this system, we examine phase portraits in both 2D and 3D. This dynamical system is taken into consideration:
We analyze the impact of the perturbed term \(\omega \cos (\alpha t)\) on the dynamical system defined by eq.(62), as shown in the figures (2,3,4,5). The system’s frequency and amplitude are denoted by \(\alpha\) and \(\omega\), respectively.

The figure represent chaotic behavior with parameters \(s_{1}=1\), \(s_{2}=-1\), \(\omega =0.01\), and \(\alpha =2\pi\).

The figure represent chaotic behavior with parameters \(s_{1}=1\), \(s_{2}=-1\), \(\omega =1\), and \(\alpha =2\pi\).

The figure represent chaotic behavior with parameters \(s_{1}=1\), \(s_{2}=-1\), \(\omega =2\), and \(\alpha =2\pi\).

The figure represent chaotic behavior with parameters \(s_{1}=1\), \(s_{2}=-1\), \(\omega =2.9\), and \(\alpha =2\pi\).
Sensitivity analysis
Here, we investigate the sensitivity of the dynamical system defined by eq.(60)49,50. In order to do this, we have to solve the following dynamical system54,55
The values of parameters are \(s_{1}=2\) and \(s_{2}=-1\). The initial conditions set as:
This analytical procedure allows us to verify that the stability of the solution was barely impacted by slight modifications to the initial conditions. Figure (6) illustrates the outcomes of this efficient approach. The red ones indicate the dynamics of class u, whereas the blue curves show the dynamics of z. The subfigures (6a,b,c,d,e,f) are shows that how the initial conditions are effects on our model.

The subfigures represent numerical demonstration of the variables with different parameters.
Graphical representation
In this paper, we emphasize the various soliton behaviors using the JEF expansion technique to demonstrate the obtained solutions in the physical interpretation. These graphs demonstrate various soliton behaviors using Wolfram Mathematica 11.1 to illustrate how we may physically interpret the solutions of the JEF expansion approach. We plotted the following 2D, 3D and contour graphs: Figure (7) is plotted for \(u_{2}(x,t)\) which is provided us the dark soliton by selecting various parameter values, Figure (8) for \(u_{4}(x,t)\) which shows the bright behavior, Figure (9) is draw for \(u_{8}(x,t)\), Figure (10) for \(u_{10}(x,t)\) and Figure (11) for \(u_{19}(x,t)\) which represents solitary wave solutions, Figure (12) is draw for the solution \(u_{27}(x,t)\) and Figure (13) for \(u_{36}(x,t)\) shows the complex dark-bright soliton behavior as 2D, 3D, and contour representations. The generalized BO equation describes internal waves in stratified fluids while it enables studies of two-layer fluid solitons which maintain stability as propagating waveforms in oceanographic applications. The solitonic waveforms serve as essential tools for investigating nonlinear deep and intermediate water wave interactions. Geophysical applications use the generalized BO equation for analysis of atmospheric waves together with plasmas under magnetohydrodynamic (MHD) flows. These soliton solutions serve an essential purpose in optical fiber communication systems when used for pulse propagation under weak nonlocal dispersion effects. This equation finds important applications in condensed matter physics through its usage in analyzing the behavior of edge waves in superfluid films and quantum Hall systems.

The figure represents 3D, 2D & contour of solution \(u_2(x,t)\) when \(c_2=-0.41, c_3=0.2, c_4=0.6, a=1.4, b=0.1, c_1=0.9, y =1\).

The figure represents 3D, 2D, and contour for the solution \(u_4(x,t)\) when \(c_2=0.3, c_3=0.2, c_4=0.4, a=0.3, b=0.1, c_1=0.8, y=1\).

The figure represents 2D, 3D & contour for solution \(u_8(x,t)\) when \(c_2=0.4, c_3=0.66, c_4=1.2, a=0.5, b=1.3, c_1=1.9, y=1\).

The figure represents 3D, 2D, and contour for the solution \(u_{10}(x,t)\) when \(c_2=0.3, c_3=0.4, c_4=0.3, a=0.3, b=0.3, c_1=0.7, y=1\).

The figure represents 2D, 3D & contour for solution \(u_{19}(x,t)\) when \(c_2=0.4, c_3=0.6, c_4=1.3, a=0.5, b=1.2, c_1=1.6, y=1\).

The figure represents 2D, 3D & contour for solution \(u_{27}(x,t)\) when \(c_2=0.3, c_3=0.4, c_4=0.5, a=1.3, b=1.2, c_1=0.7, y=1\).

The figure represents 3D, 2D, and contour for the solution \(u_{36}(x,t)\) when \(c_2=1.6, c_3=1.2, c_4=1.6, a=0.5, b=1.8, c_1=1.4, y=0.8\).
Modulation instability
Several higher order non-linear PDEs that display instability are examined in relation to the modulation of the steady state caused by an interaction between the non-linear and dispersive effects. Using this method, the perturbed steady-state solution of \(eq.(1)\) has the structure shown below57
where \(\psi\) is the perturbation term, \(\Lambda\) \(\ll\) 1 is the perturbation coefficient parameter, and f is the incident power. We can use \(eq.(64)\) to replace \(eq.(1)\) after linearizing \(\psi\) as, yielding the following result.
In order to investigate instability, we must find the solutions that grow exponentially as
where \(\delta _1\) and \(\delta _2\) stand for wave numbers and \(\rho\) for frequency, also \(f_{1}\) and \(f_{2}\) are represented as constants. The following equation is obtained by substituting \(f_{1}\) and \(f_{2}\) coefficients from \(eq.(66)\) into \(eq.(65)\).
After collecting the values of \(e^{i \left( \delta _1 x+\delta _2 y-\rho t\right) }\) and \(e^{-i \left( \delta _1 x+\delta _2 y-\rho t\right) }\), we have set of homogeneous equations that are given below:
Following the resolution of the above mentioned system, the relevant dispersion relation \(\rho\) = \(\rho (\delta _1,\delta _2)\) is produced as follows:
If \(\rho\) is real, the steady-state solution is stable, according to the linear stability analysis of the steady-state given by \(eq.(68)\).
Conclusions
The current study explored the exact solutions for the generalized BO equation model. It is a nonlinear partial differential equation (NLPDE) and used to explained various physical system such as plasma dynamics and wave propagation phenomena etc.Numerous analytical techniques are used to find exact solutions of NLPDE and one of the them is the JEF expansion method. We explored different soliton solutions such as dark and bright, complex dark-bright, and solitary wave. It demonstrates that the methodologies used are significantly better than conventional approaches in other fields. The generalized BO equation model’s modulation instability dynamics are also covered in this work. Even after fifty years of research, interesting novel problems are continually generated by modulation instability. The most recent findings could contribute to explaining the physical significance of the model as well as other nonlinear models often used in study. Bifurcation is investigated using the theory of planar dynamical systems, then examined the potential existence of chaotic behaviors. A perturbed term was introduced. Comprehensive 2D and 3D phase portraits are presented to further enhance this investigation. The sensitivity analysis is also studied for various initial conditions and it is noted that our model is sensitive.
Data availability
The datasets used and/or analysed during the current study are available from the corresponding author on reasonable request.
References
Niwas, M. & Kumar, S. Multi-peakons, lumps, and other solitons solutions for the (2+ 1)-dimensional generalized Benjamin-Ono equation: An inverse (G’/G)-expansion method and real-world applications. Nonlinear Dynamics 111(24), 22499–22512 (2023).
Grimshaw, R. H. J., Smyth, N. F. & Stepanyants, Y. A. Interaction of internal solitary waves with long periodic waves within the rotation modified Benjamin-Ono equation. Phys. D Nonlinear Phenom.419, 132867 (2021).
Adel, M., Aldwoah, K., Alahmadi, F. & Osman, M. S. The asymptotic behavior for a binary alloy in energy and material science: The unified method and its applications. J. Ocean Eng. Sci.9(4), 373–378 (2024).
Tarla, S., Ali, K. K., Yilmazer, R. & Osman, M. S. New optical solitons based on the perturbed Chen-Lee-Liu model through Jacobi elliptic function method. Opt. Quantum Electron.54(2), 131 (2022).
Osman, M. S., Machado, J. A. T. & Baleanu, D. On nonautonomous complex wave solutions described by the coupled Schrödinger-Boussinesq equation with variable-coefficients. Opt. Quantum Electron.50, 1–11 (2018).
Osman, M. S. Multiwave solutions of time-fractional (2+ 1)-dimensional Nizhnik–Novikov–Veselov equations. Pramana 88, 1–9 (2017).
Akbar, M. A., Abdullah, F. A., Islam, M. T., Al Sharif, M. A. & Osman, M. S. New solutions of the soliton type of shallow water waves and superconductivity models. Results Phys.44, 106180 (2023).
Nisar, K. S. et al. On beta-time fractional biological population model with abundant solitary wave structures. Alexandria Eng. J.61(3), 1996–2008 (2022).
Umar, T., Hosseini, K., Kaymakamzade, B., Boulaaras, S. & Osman, M. S. Hirota D-operator forms, multiple soliton waves, and other nonlinear patterns of a 2D generalized kadomtsev–petviashvili equation. Alexandria Eng. J.108, 999–1010 (2024).
Arafat, S. Y., Rahman, M. M., Karim, M. F. & Amin, M. R. Wave profile analysis of the (2+ 1)-dimensional Konopelchenko-Dubrovsky model in mathematical physics. Partial Differential Equations in Applied Mathematics 8, 100573 (2023).
Arafat, S. M., Saklayen, M. A. & Islam, S. M. Analyzing diverse soliton wave profiles and bifurcation analysis of the (3+ 1)-dimensional mKdV–ZK model via two analytical schemes. AIP Adv.https://doi.org/10.1063/5.0248376 (2025).
Arafat, S. Y., Islam, S. R., Rahman, M. M. & Saklayen, M. A. On nonlinear optical solitons of fractional Biswas-Arshed Model with beta derivative. Results in Physics 48, 106426 (2023).
Islam, S. R. & Basak, U. S. On traveling wave solutions with bifurcation analysis for the nonlinear potential Kadomtsev-Petviashvili and Calogero-Degasperis equations. Partial Differential Equations in Applied Mathematics 8, 100561 (2023).
Dey, P., Sadek, L. H., Tharwat, M. M., Sarker, S., Karim, R., Akbar, M. A., ... & Osman, M. S. Soliton solutions to generalized (3+ 1)-dimensional shallow water-like equation using the \((\phi ^{\prime }/\phi , 1/\phi )\)-expansion method. Arab Journal of Basic and Applied Sciences 31(1), 121–131 (2024).
Khan, K., Mudaliar, R. K. & Islam, S. R. Traveling waves in two distinct equations: the (1+ 1)-dimensional cKdV–mKdV equation and the sinh-Gordon equation. International Journal of Applied and Computational Mathematics 9(3), 21 (2023).
Bilal, M. & Ahmad, J. Stability analysis and diverse nonlinear optical pluses of dynamical model in birefringent fibers without four-wave mixing. Opt. Quantum Electron.54(5), 277 (2022).
Bilal, M. et al. Analytical wave structures in plasma physics modelled by Gilson-Pickering equation by two integration norms. Results Phys.23, 103959 (2021).
Khan, M. I., Asghar, S. & Sabi’u, J. Jacobi elliptic function expansion method for the improved modified kortwedge-de vries equation. Opt. Quantum Electron.54(11), 734 (2022).
Benjamin, T. B. Internal waves of permanent form in fluids of great depth. J. Fluid Mech.29(3), 559–592 (1967).
Ono, H. Algebraic solitary waves in stratified fluids. J. Phys. Soc. Japan39(4), 1082–1091 (1975).
Davis, R. E. & Acrivos, A. Solitary internal waves in deep water. J. Fluid Mech.29(3), 593–607 (1967).
Tao, T. Global well-posedness of the Benjamin-Ono equation in H1 (R). Journal of Hyperbolic Differential Equations 1(01), 27–49 (2004).
Saut, J. C. Quelques généralisations de l’équation de Korteweg-de Vries. II. Journal of Differential Equations 33(3), 320–335 (1979).
Ginibre, J. & Velo, G. Smoothing properties and existence of solutions for the generalized Benjamin-Ono equation. J. Differ. Equations93(1), 150–212 (1991).
Ambrose, D. M. & Wilkening, J. Computation of time-periodic solutions of the Benjamin-Ono equation. J. Nonlinear Sci.20(3), 277–308 (2010).
Ma, H., Yue, S., Gao, Y. & Deng, A. Lump solution, breather soliton and more soliton solutions for a (2+ 1)-dimensional generalized Benjamin-Ono equation. Qual. Theory Dyn. Syst.22(2), 72 (2023).
Tariq, K. U., Inc, M., Kazmi, S. R. & Alhefthi, R. K. Modulation instability, stability analysis and soliton solutions to the resonance nonlinear Schrödinger model with Kerr law nonlinearity. Optical and Quantum Electronics 55(9), 838 (2023).
Wang, J., Shehzad, K., Seadawy, A. R., Arshad, M. & Asmat, F. Dynamic study of multi-peak solitons and other wave solutions of new coupled KdV and new coupled Zakharov-Kuznetsov systems with their stability. J. Taibah Univ. Sci.17(1), 2163872 (2023).
Rizvi, S. T. R., Seadawy, A. R., Ali, I., Bibi, I. & Younis, M. Chirp-free optical dromions for the presence of higher order spatio-temporal dispersions and absence of self-phase modulation in birefringent fibers. Mod. Phys. Lett. B34(35), 2050399 (2020).
Ma, Y. L., Wazwaz, A. M. & Li, B. Q. Soliton resonances, soliton molecules, soliton oscillations and heterotypic solitons for the nonlinear Maccari system. Nonlinear Dyn.111(19), 18331–18344 (2023).
Rehman, S. U., Bilal, M. & Ahmad, J. Highly dispersive optical and other soliton solutions to fiber Bragg gratings with the application of different mechanisms. Int. J. Mod. Phys. B36(28), 2250193 (2022).
Bilal, M., Shafqat-Ur-Rehman, & Ahmad, J. Analysis in fiber Bragg gratings with Kerr law nonlinearity for diverse optical soliton solutions by reliable analytical techniques. Modern Physics Letters B 36(23), 2250122 (2022).
Bilal, M. & Ahmad, J. Dynamical nonlinear wave structures of the predator–prey model using conformable derivative and its stability analysis. Pramana 96(3), 149 (2022).
Zhang, R. F., Li, M. C., Cherraf, A. & Vadyala, S. R. The interference wave and the bright and dark soliton for two integro-differential equation by using bnnm. Nonlinear Dyn.111(9), 8637–8646 (2023).
Zhang, R. F., Li, M. C., Gan, J. Y., Li, Q. & Lan, Z. Z. Novel trial functions and rogue waves of generalized breaking soliton equation via bilinear neural network method. Chaos Solitons Fractals154, 111692 (2022).
Guo, B., Ling, L. & Liu, Q. P. Nonlinear Schrödinger equation: Generalized Darboux transformation and rogue wave solutions. Phys. Rev. E85(2), 026607 (2012).
Bilal, M., Ren, J., Inc, M. & Alhefthi, R. K. Optical soliton and other solutions to the nonlinear dynamical system via two efficient analytical mathematical schemes. Opt. Quantum Electron.55(11), 938 (2023).
Bilal, M. & Ahmad, J. Investigation of optical solitons and modulation instability analysis to the Kundu–Mukherjee–Naskar model. Opt. Quantum Electron.53(6), 283 (2021).
Bilal, M., Ren, J., Alsubaie, A. S. A., Mahmoud, K. H. & Inc, M. Dynamics of nonlinear diverse wave propagation to improved Boussinesq model in weakly dispersive medium of shallow waters or ion acoustic waves using efficient technique. Opt. Quantum Electron.56(1), 21 (2024).
Niwas, M. & Kumar, S. New plenteous soliton solutions and other form solutions for a generalized dispersive long-wave system employing two methodological approaches. Opt. Quantum Electron.55(7), 630 (2023).
Bilal, M. & Ahmad, J. Dispersive solitary wave solutions for the dynamical soliton model by three versatile analytical mathematical methods. Eur. Phys. J. Plus137(6), 674 (2022).
Kumar, S. & Niwas, M. New optical soliton solutions and a variety of dynamical wave profiles to the perturbed Chen–Lee–Liu equation in optical fibers. Opt. Quantum Electron.55(5), 418 (2023).
Saied, E. A., Abd El-Rahman, R. G. & Ghonamy, M. I. A generalized Weierstrass elliptic function expansion method for solving some nonlinear partial differential equations. Comput. Math. Appl.58(9), 1725–1735 (2009).
Wazwaz, A. M. & El-Tantawy, S. A. Bright and dark optical solitons for (3+ 1)-dimensional hyperbolic nonlinear Schrödinger equation using a variety of distinct schemes. Optik 270, 170043 (2022).
Hussain, A., Chahlaoui, Y., Zaman, F. D., Parveen, T. & Hassan, A. M. The Jacobi elliptic function method and its application for the stochastic NNV system. Alexandria Eng. J.81, 347–359 (2023).
Qasim, M., Yao, F., Baber, M. Z. & Younas, U. Investigating the higher dimensional Kadomtsev–Petviashvili–Sawada–Kotera–Ramani equation: Exploring the modulation instability, Jacobi elliptic and soliton solutions. Phys. Scr.100(2), 025215. (2025).
Mohammed, W., Sidaoui, R., Alshammary, H. & Algolam, M. Random wave equation for the stochastic quantum Zakharov-Kuznetsov equation and their exact solutions. Eur. J. Pure Appl. Math.18(1), 5665–5665 (2025).
Li, Z. & Hu, H. Chaotic pattern, bifurcation, sensitivity and traveling wave solution of the coupled Kundu–Mukherjee–Naskar equation. Results Phys.48, 106441 (2023).
ur Rahman, M., Sun, M., Boulaaras, S. & Baleanu, D. Bifurcations, chaotic behavior, sensitivity analysis, and various soliton solutions for the extended nonlinear Schrödinger equation. Bound. Value Probl.2024(1), 15 (2024).
Nadeem, M., Islam, A., Senol, M. & Alsayaad, Y. The dynamical perspective of soliton solutions, bifurcation, chaotic and sensitivity analysis to the (3+ 1)-dimensional Boussinesq model. Scientific Reports 14(1), 9173 (2024).
Arafat, S. Y. & Islam, S. R. Bifurcation analysis and soliton structures of the truncated M-fractional Kuralay-II equation with two analytical techniques. Alexandria Engineering Journal 105, 70–87 (2024).
Islam, S. R. On the soliton structures of the (2+ 1)-dimensional long wave-short wave resonance interaction equation with two analytical techniques and its bifurcation analysis. GANIT: Journal of Bangladesh Mathematical Society 44(1), 59–76 (2024).
Islam, S. R. Bifurcation analysis and exact wave solutions of the nano-ionic currents equation: Via two analytical techniques. Results in Physics 58, 107536 (2024).
Islam, S. R. et al. Stability analysis, phase plane analysis, and isolated soliton solution to the LGH equation in mathematical physics. Open Physics 21(1), 20230104 (2023).
Rayhanul Islam, S. M., Yiasir Arafat, S. M. & Inc, M. Exploring novel optical soliton solutions for the stochastic chiral nonlinear Schrödinger equation: Stability analysis and impact of parameters. J. Nonlinear Opt. Phys. Mater.34(05), 2450009 (2025).
Islam, S. R., Khan, K. & Akbar, M. A. Optical soliton solutions, bifurcation, and stability analysis of the Chen-Lee-Liu model. Results in Physics 51, 106620 (2023).
Chou, D., Iqbal, I., Rehman, H. U., Khalil, O. H. & Osman, M. S. Heat conduction dynamics: A study of lie symmetry, solitons, and modulation instability. Rend. Lincei Sci. Fis. Nat. (1), https://doi.org/10.1007/s12210-025-01302-y (2025).
Acknowledgements
The authors extend their appreciation to Northern Border University, Saudi Arabia, for supporting this work through project number (NBU-CRP-2025-1266).
Author information
Authors and Affiliations
Contributions
AAH: review & editing the manuscript, MZB: Supervision, Methodology, AB: Visualization, Investigation, Writing, MWY RA Formal Analysis, Supervision, RS & EB: Investigation, editing the manuscript. All authors have read and agreed to the published version of the manuscript.
Corresponding authors
Ethics declarations
Competing interests
The authors declare no competing interests.
Additional information
Publisher’s note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
Open Access This article is licensed under a Creative Commons Attribution-NonCommercial-NoDerivatives 4.0 International License, which permits any non-commercial use, sharing, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons licence, and indicate if you modified the licensed material. You do not have permission under this licence to share adapted material derived from this article or parts of it. The images or other third party material in this article are included in the article’s Creative Commons licence, unless indicated otherwise in a credit line to the material. If material is not included in the article’s Creative Commons licence and your intended use is not permitted by statutory regulation or exceeds the permitted use, you will need to obtain permission directly from the copyright holder. To view a copy of this licence, visit http://creativecommons.org/licenses/by-nc-nd/4.0/.
About this article

Cite this article
Hassaballa, A.A., Baber, M.Z., Butt, A. et al. Dynamical description and analytical study of traveling wave solutions for generalized Benjamin-Ono equation. Sci Rep 15, 33923 (2025). https://doi.org/10.1038/s41598-025-08813-6
Received:
Accepted:
Published:
DOI: https://doi.org/10.1038/s41598-025-08813-6
