
Abstract
This work constructs the distinct type of solitons solutions to the nonlinear Perturbed Gerdjikov-Ivanov (PGI) equation with Atangana’s derivative. It interprets its optical soliton solutions in the existence of high-order dispersion. For this purpose, a wave transformation is applied to convert the fractional PGI Equation to a non-linear ODE. Solitons solutions and further solutions of the obtained model are sorted out by using the Sardar sub-equation (SSE) method and the generalized unified method. The different types of soliton solutions such as bright, kink, periodic, and exact dark solitons are achieved. Dynamical and sensitivity analysis is carried out for the obtained results. 3D, 2D, and contour graphs of attained solutions are presented for elaboration. Nonlinear model have played an important role in optic fibber, optical communications and optical sensing.
Similar content being viewed by others

Introduction
An optical soliton is a self-reinforcing and self-sustaining wave packet that maintains its shape while propagating through a nonlinear medium. It was first observed in the context of nonlinear optics in the 1970s and has since been studied extensively due to its unique properties and potential applications1. Chen et al.2 provides an overview of the principles, fabrication techniques, and applications of FMF-LPFGs in mode division multiplexing optical communications and optical sensing. Optical solitons arise because of the balance between the dispersive and nonlinear effects in a medium. Dispersion causes different frequencies of light to travel at different speeds, leading to broadening of the pulse over time. However, non-linearity causes the pulse to self-focus, which counteracts the dispersion and allows the pulse to maintain its shape3,4,5. Eslamifar et al.6 explore that copper nanoparticles exhibit strong nonlinear absorption and refraction, with optical nonlinearities, highlighting their potential for nonlinear optics applications.
Numerous efficient approaches have been employed to attain soliton solutions of nonlinear partial differential equations. The breather, one-soliton, two-soliton, lump, and interaction soliton solutions of the (2+1)-dimensional Kadomtsev-Petviashvili-Sawada-Kotera-Ramani equation have been examined by utilizing the Hirota bilinear method7. The one-soliton, two-soliton, lump, and traveling wave solutions of the (3+1)-dimensional Kadomtsev-Petviashvili-Boussinesq-like equation have also been investigated by using the Hirota method8. Exact solutions of the fractional Hirota-Satsuma coupled KdV equation were explored by utilizing the logistic function method, accompanied by a dynamical analysis9. Lump and novel interaction solutions, along with a chaotic analysis, were attained for the (3+1)-dimensional generalized shallow water-like equation10. Dark, bright, combined dark-bright, and singular periodic soliton solutions of the (3+1)-dimensional nonlinear Schrödinger equation were achieved by using the extended sinh-Gordon equation expansion technique11. Furthermore, the extended auxiliary equation scheme and the extended Kudryashov technnique were applied to the nonlinear Schrödinger equation to derive dark, singular, and periodic solitary wave solutions12. Chirped optical soliton solutions of the nonlinear Schrödinger equation with nonlinear chromatic dispersion and a quadratic-cubic refractive index law were attained via the new extended auxiliary equation technique13. Solitary wave solutions of the integrable Kuralay equation were studied by utilizing both the modified F-expansion method and the new extended auxiliary equation method14. AL-Taie and Salim Jasim attained the bright and dark soliton solutions of the nonlinear Schrödinger equation through the application of the split-step Fourier method15.
Recently researchers have applied the SSE method and the generalized unified method on many nonlinear model. Optical soliton solution of nonlinear fractional Schrödinger equation was attained by utilizing the SSE method16. In17, the optical solitary wave solution of the perturbed Fokas-Lenells equation was attained by using the SSE method. The ion-acoustic waves of the nonlinear plasma fluid model were attained in18. Traveling waves solution of fractional Schrödinger equation by employing generalized Unified method19. Asjad et al.20 achieved the traveling wave solutions to the Boussinesq equation via SSE technique. The exact solution of the Kundu-Mukherjee-Naskar equation was attained in21. Bifurcation analysis in optical fibers involves studying how the qualitative behavior of optical solitons and wave propagation changes as system parameters, such as dispersion, nonlinearity, and input power, are varied. These changes can lead to different dynamical regimes, including the formation of stable or unstable solitons, periodic oscillations, or chaotic behavior. Common bifurcations in optical systems include pitchfork, Hopf, and saddle-node bifurcations, which determine the stability and transition of solutions. For example, in a fiber with varying dispersion, a critical bifurcation point may cause a transition from bright to dark solitons. Such analysis is essential for understanding pulse stability, soliton interactions, and the onset of optical instabilities, enabling better control of optical communication systems and nonlinear devices22,23,24.
Nonlinear partial differential equations(NLPDEs) are very useful for their omnivorous portions in physical systems, fluid dynamics, quantum mechanics, control theory, nonlinear optics, plasma physics, and other numerous fields of science and engineering25,26,27,28,29. However, an identical and worthy example of NLPDEs is the PGI equation30,31,32,33,34,35.
The Eq. (1) plays an important role in optical fibers. Nonetheless this research goals to investigate the PGI Eq. (1) with Atangana’s conformable derivative36 i.e.
The different kinds of fractional derivatives have been used in the past, such as Caputo fractional38, Reimann-Liouville37, conformable fractional derivative39, beta derivative40, truncated M-fractional derivative41,42, Atangana-Baleanu fractional derivative in Caputo sense43,44. Atangana et al.45 awarded few of the latest properties to the conformable derivative. Many applications of Atangana’s conformable derivatives have been used previously. For example, Modifled Korteweg de-Vries system46, Schrodinger equation47, Zakharov-Kuznetsov equation48, Caudrey-Dodd-Gibbon equation49.
The PGI equation has been observed by many efficient methods. For instance, Biswas and Alqahtani30 draw out the soliton solutions of the PGI equation by utilizing the Semi-Inverse technique. By applying the Sine-Gorden technique, the optical solitons solution of the PGI equation32 were obtained. Similarly, by applying the Sine-Cosine formula technique, the dark and bright solitons solution of the PGI equation is achieved33. The study investigates the gap in existing literature on the PGI equation by exploring new soliton solutions incorporating Atangana’s conformable derivative, using the Sardar sub-equation method and generalized unified method. While distinct technique like the Semi-Inverse technique and Sine-Gordon method have been applied, the effects of non-locality and higher-order dispersion on soliton dynamics remain under explored. This research contributes novel insights into these effects, advancing both theoretical understanding and potential applications in optical communication systems.
The primary contributions of this study are as follows:
-
It introduces a new class of soliton solutions to the PGI equation, incorporating Atangana’s conformable derivative, by employing the Sardar sub-equation method and generalized unified method.
-
A novel traveling wave transformation is applied, which distinguishes this study from previous works, such as50, where different transformations were used.
-
It provides new insights into the effects of non-locality and high-order dispersion on soliton dynamics, offering a deeper understanding of how these factors influence soliton behavior. This research not only extends theoretical knowledge of the PGI equation but also paves the way for potential future applications in optical communication systems.
The remaining paper is divided into different sections. In “Atangana’s-conformable derivative”, we discussed the fractional derivative. In “Methods and their objective”, we mentioned the description of methods. In “ Analysis of equation”, we analyze the equation with soliton solutions. In “ Graphically discussion” discussed the graphical representation. In “ Dynamical analysis”, the dynamical analysis is discussed in details. At the end, the conclusion is presented in “Conclusion”.
Atangana’s-conformable derivative
Atangana’s conformal derivative is a novel extension of the traditional derivative, purposed to capture non-local effects and long-range interactions in systems showing memory or scaling behaviors, making it especially important in fractional calculus and mathematical physics. Unlike classical derivatives, which concentrated on local changes at a single point, and fractional derivatives such as Riemann–Liouville or Caputo derivatives, which generalize the idea of differentiation to non-integer orders, Atangana’s conformal derivative contain a flexible kernel function that allows for more complex modeling of physical systems with long-range dependencies. This non-locality and the utilize of a power-law term for interaction distances make it appropriate for depicting phenomena like anomalous diffusion and complex dynamical systems, presenting a versatile alternative to more traditional derivative idea that are limited in modeling systems with memory or hereditary effects.
Definition 1
Let \(f(\varrho )\) be a function defined for all non-negative \(\varrho\). The Atangana-conformable derivative of \(f(\varrho )\)36 as given below,
Properties
Let f and g be any two function, \(f\ne 0\), and \(\alpha \in (0;1]\) then
1: \(D_\varrho ^\alpha \{af(\varrho )+bg(\varrho )\}=aD_\varrho ^\alpha f(\varrho )+bD_\varrho ^\alpha g(\varrho )\),
where \(a,b\in \Re\)
2: \(D_\varrho ^\alpha \{f(\varrho ).g(\varrho )\}=f(\varrho )D_\varrho ^\alpha \{g(\varrho )\}+g(\varrho )D_\varrho ^\alpha \{f(\varrho )\}\),
3: \(D_\varrho ^\alpha (\frac{f(\varrho )}{g(\varrho )})=\frac{g(\varrho ) D_\varrho ^\alpha \{f(\varrho )\}-f(\varrho ) D_\varrho ^\alpha \{g(\varrho )\}}{g(\varrho )^2}\),
4: \(D_\varrho ^\alpha \{f(\varrho )\}=(\varrho +\frac{1}{\Gamma (\alpha )})^{1-\alpha }\frac{df(\varrho )}{d\varrho }\),
5: \(D_\varrho ^\alpha f(\eta )=I\frac{df(\eta )}{d\eta }\), Here, I is constant and \(\eta =\frac{I}{\alpha }(\varrho +\frac{1}{\Gamma (\alpha )})^\alpha .\)
Methods and their objective
In this section, we explore the basic steps of the SSE method and the generalized uniform method. Consider the following NPDE,
Using the transformation,
The Eq. (4) become,
Sardar sub-equation method
The main steps of this method20 are given below,
Step:1
solution of the above equation is,
where, \(\lambda _n\), \(n=1,2,...,n\) are non-zero parameters to be found later.
Step:2 We apply the homogeneous balance technique to achieve the value of N in Eq. (7).
The solution of the above equation is given below,
Family 1: If \(a_2>0\) and \(a_0=0\),
where, \({{\,\textrm{sech}\,}}_{pq}(\eta )=\frac{2}{pe^{\eta }+qe^{-\eta }}\), \({{\,\textrm{csch}\,}}_{pq}(\eta )=\frac{2}{pe^{\eta }-qe^{-\eta }}\).
Family 2: If \(a_2<0\) and \(a_0=0\),
where, \(\sec _{pq}(\eta )=\frac{2}{pe^{i\eta }+qe^{-i\eta }}\), \(\csc _{pq}(\eta )=\frac{2i}{pe^{i\eta }-qe^{-i\eta }}\).
Family 3: If \(a_2<0\) and \(a_0=\frac{a^2_2}{4}\),
where, \(\tanh _{pq}(\eta )=\frac{pe^{\eta }-qe^{-\eta }}{pe^{\eta }+qe^{-\eta }}\), \(\coth _{pq}(\eta )=\frac{pe^{\eta }+qe^{-\eta }}{pe^{\eta }-qe^{-\eta }}.\)
Family 4: If \(a_2>0\) and \(a_0=\frac{a^2_2}{4}\),
\(\tan _{pq}(\eta )=i\frac{pe^{i\eta }-qe^{-i\eta }}{pe^{\eta }+qe^{-i\eta }}\), \(\cot _{pq}(\eta )=i\frac{pe^{i\eta } +qe^{-i\eta }}{pe^{i\eta }-qe^{-i\eta }},\)
where p and q are known parameters.
Step:3
Putting Eq. (7) into Eq. (6) with Eq. (8), then we get the system of algebraic equations. The system is solved by using Mathematica software, and then the solution of Eq. (7) is substituted into Eq. (7) by utilizing Eq. (5). Finally, the solution of Eq. (4) is attained.
Generalized unified method
The main steps of this method21 are given below,
Step:1: Consider the equation,
In which \(a_n\), \(b_n\) are unknown and determined later.
Here, \(\mu\) is the unknown parameter.
The general solution of Eq. (14) as follows:
where \(A_1, B_1\) and \(C_1\) are the unknown parameters.
Step:2 We apply the homogeneous balance technique to attain the value of N on Eq. (13).
Step:3 Substituting Eq. (13) with Eq. (14) into Eq. (6) and obtained the results in the form of an algebraic system, which solving it by Mathematica software gives the optical solitons of the Eq. (3).
Analysis of equation
To achieve the optical solitons solutions of the PGI Equation with the Atangana conformable derivative, we adopt the following wave transformation,
where,
where \(\upsilon\) indicates the velocity, \(\kappa\) represents the wave number, \(\phi\) is the phase component, \(\omega\) represents the frequency, and K is the width of the soliton. Substituting the wave transformation Eq. (16) and Eq. (17) into Eq. (2) and separates the real and imaginary parts. The real part is
and the imaginary part is
From Eq. (19)
Substituting Eq. (20) into Eq. (18). After this setting \(F(\eta )=\sqrt{V(\eta )}\) into Eq. (18), then we have
Application of sub-Sardar equation method
Applying the balance technique on terms \((\frac{dV(\eta )}{d\eta })^2\) with \(V(\eta )^4\) of Eq. (21), then we get \(N=1\). Putting this value of N into Eq. (7).
Substituting Eq. (22) into Eq. (21), then we get following system
Solving above system, we get
Eq. (22) become,
Solution of Eq. (2) are written as:
Family 1: If \(a_2>0\) and \(a_0=0\),
Where, \(\eta =\frac{k}{\alpha }[(z+\frac{1}{\Gamma (\alpha )})^\alpha +\upsilon (t+\frac{1}{\Gamma (\alpha )})^\alpha ], \xi =-\frac{\kappa }{\alpha }[(z+\frac{1}{\Gamma (\alpha )})^\alpha +\omega (t+\frac{1}{\Gamma (\alpha )})^\alpha ].\)
Family 2: If \(a_2<0\) and \(a_0=0\),
Family 3: If \(a_2<0\) and \(a_0=\frac{a^2_2}{4}\),
Family 4: If \(a_2>0\) and \(a_0=\frac{a^2_2}{4}\),
Application of generalized unified method
Applying the balance technique on Eq. (21), then we get \(N=1\). Putting this value of N into Eq. (7).
Putting Eq. (40) into Eq. (21), then we get following system
Solving the above system, then we get
Set 1:
Solutions for Eq. (2) are obtain as follows,
where, \(\eta =\frac{k}{\alpha }[(z+\frac{1}{\Gamma (\alpha )})^\alpha +\upsilon (t+\frac{1}{\Gamma (\alpha )})^\alpha ], \xi =-\frac{\kappa }{\alpha }[(z+\frac{1}{\Gamma (\alpha )})^\alpha +\omega (t+\frac{1}{\Gamma (\alpha )})^\alpha ].\)
Set 2:
Solutions for Eq. (2) are obtain as follows,
Set 3:
Solutions for Eq. (2) are obtain as follows,
Graphically discussion
In this section, we present the graphical discussion of the attained solutions to the PGI equation to gain deeper knowledge into the physical nature and dynamic behavior of the nonlinear optical model. The solutions were illustrated by allocating suitable values to the arbitrary constants by utilizing Mathematica 11. These visualizations serve to present the emergence of different types of optical solitons governed by the equation under study.
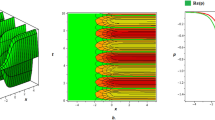
The Fig. 1 depict the graphical solutions of Eq. (26) with parameters \(\alpha _1=0.8, \alpha _2=0.4, \alpha _4=0.5, \nu =-0.5, \alpha _5=0.1, a_0=0, \alpha _6=0.5, \lambda _0=-0.2, K=0.02, p=0.4, q=4\), presenting W-type soliton profiles for varying fractional parameters \(\alpha\). The 2D and contour plots shows the characteristic multi-peaked“W” shape of these solitons and their evolution over time, while the 3D surface plots display how changes in \(\alpha\) impact the soliton’s amplitude, width, and oscillatory behavior. W-type solitons are important in optical fiber because their multi-lobed structure makes the transmission of complex pulse shapes that keep stability over long distances despite dispersive and nonlinear effects. The inclusion of fractional dynamics, modeled by the parameter \(\alpha\), presents memory and anomalous dispersion effects that can be leveraged to tailor pulse propagation, potentially improving the performance and resilience of optical communication systems.
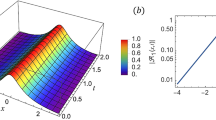
The Fig. 2 shows the bright optical soliton with parametric value \(\alpha _1=-0.8, \alpha _2=0.04, \nu =0.5, \alpha _4=0.5, \alpha _5=0.1, a_0=0, \alpha _6=0.5, \lambda _0=2, K=0.02, p=1, q=0.1\). Fig. 2 shows distinct graphical visualizations of the solution \(|\psi (z,t)|\) to the PGI equation, analyzing its behavior with respect to space z, time t, and the fractional parameter \(\alpha\). Figure 2a, b depict 2D plots of the wave amplitude over space for distinct times and fractional orders, respectively, showing that the wave shape remains localized and stable over time but varies with \(\alpha\). The 3D surface plots d–f shows how the solution evolves in both space and time for increasing values of \(\alpha = 0.5, 0.8,\) and 1.0, respectively, exposing that higher fractional orders yield to more complex oscillatory patterns and increased wave activity. Bright optical solitons are stable, localized wave packets in optical fibers formed by a balance between anomalous dispersion and nonlinear effects. These solitons are crucial in optical communications and ultrafast pulse generation.
The Figs. 3, 4 and 5 represents the periodic optical soliton. Periodic optical solitons are repetitive, wave-like structures in optical fibers that result from a stable balance between nonlinearity and periodic modulation of dispersion or nonlinearity. Unlike isolated solitons, they exhibit periodic intensity peaks. These solitons have applications in fiber-optic communication and pulse train generation for mode-locked lasers. In each figure, subplots a, b shows 2D graphs indicating the amplitude \(|\psi (z,t)|\) as a function of the spatial coordinate z at different time instants t and for distinct fractional parameters \(\alpha\). These graphs show the periodic intensity peaks, a hallmark of periodic solitons, and present how the wave profiles evolve both temporally and with changes in fractional order. The contour plots c in each figure present a two-dimensional visualization of constant amplitude levels over the spatial-temporal plane, clearly emphasizing the periodic repetition of wave maxima and minima along both axes. Subplots d–f provide 3D surface plots for \(\alpha =0.5, 0.8,\) and 1.0, respectively, highlighting the full spatiotemporal dynamics of the periodic solitons. These 3D visualizations shows how the fractional parameter \(\alpha\) affect the shape, frequency, and amplitude modulation of the soliton trains. Increasing \(\alpha\) typically results in more complex oscillatory patterns and finer wave structures.
Figure 6 indicates the graphical solution of Eq. (46) with parameters \(\alpha _1=0.8, \alpha _2=0.4, \alpha _4=0.5, \nu =-0.5, \alpha _5=0.1, a_0=2, \alpha _6=0.5, \mu =-0.3,\eta _0 =-0.2\) illustrating the behavior of dark optical solitons. The 2D graphs display the amplitude \(|\psi (z,t)|\) as a function of the spatial variable z for different times \(t=0,1,2\) and varying fractional parameters \(\alpha = 0.6, 0.8, 1.0\), respectively. These graphs shows localized intensity dips against a continuous-wave background, features of dark solitons. The contour plot c shows a spatial-temporal map of constant amplitude levels, highlighting the persistent dip structure throughout propagation. The 3D surface plots d–f shows the evolution of the dark soliton profile in space and time for fractional orders \(\alpha = 0.5, 0.8,\) and 1.0. As \(\alpha\) increases, the number of oscillatory wave patterns also increases, showing that fractional derivatives affect the complexity and modulation of the dark soliton structures. In this investigation, we compare the solutions attained through the methods described with those presented in51. The various types of soliton solutions are presented in Table 1, which shows the successful achievement of distinct soliton solutions.

Graphical solution of Eq. (26) with parameters \(\alpha _1=0.8, \alpha _2=0.4, \alpha _4=0.5, \nu =-0.5, \alpha _5=0.1, a_0=0, \alpha _6=0.5, \lambda _0=-0.2, K=0.02, p=0.4, q=4\).

Graphical solution of Eq. (28) with parameters \(\alpha _1=-0.8, \alpha _2=0.04, \nu =0.5, \alpha _4=0.5, \alpha _5=0.1, a_0=0, \alpha _6=0.5, \lambda _0=2, K=0.02, p=1, q=0.1\).

Graphical solution of Eq. (42) with parameters \(\alpha _1=0.8, \alpha _2=0.4, \alpha _4=0.5,\nu =0.2, \alpha _5=0.1, a_0=0.3, \alpha _6=0.5, a_0=0.2, A_1=0.1, B_1=0.2, C_1=0.3, \mu =0.2,\eta _0 =-0.2\).

Graphical solution of Eq. (43) with parameters \(\alpha _1=0.8, \alpha _2=0.4, \alpha _4=0.5, \nu =0.04, \alpha _5=0.1, a_0=0.3, \alpha _6=0.5, a_0=0.2, A_1=0.1, B_1=0.2, C_1=0.3, \mu =-0.2,\eta _0 =-0.2\).

Graphical solution of Eq. (44) with parameters \(\alpha _1=0.8, \alpha _2=0.4, \alpha _4=0.5, \nu =0.5, \alpha _5=0.1, a_0=0.2, \alpha _6=0.5, A_1=0.1, B_1=0.2, C_1=0.3, \mu =-0.2,\eta _0 =-0.2\).

Graphical solution of Eq. (46) with parameters \(\alpha _1=0.8, \alpha _2=0.4, \alpha _4=0.5, \nu =-0.5, \alpha _5=0.1, a_0=2, \alpha _6=0.5, \mu =-0.3,\eta _0 =-0.2\).
Dynamical analysis
In this section, we will discuss the dynamical behavior through bifurcation and sensitivity.
Bifurcation analysis
From (18), we can write as
Let \(\frac{\alpha _1\kappa ^2+\alpha _4\kappa -\kappa \omega }{\alpha _1K^2}=A\), \(\frac{\alpha _3\kappa +\alpha _5\kappa }{\alpha _1K^2}=B\) and \(\frac{\alpha _2}{\alpha _1K^2}=C\), then we get
Using the Galilean transformation on (60), then we get dynamical system
Case 1: \(A>0\), \(B>0\), and \(C>0\).
We take different values of parameters \(\alpha _1 = 0.3\), \(\alpha _2 = 0.5\), \(\alpha _3 = 0.4\), \(\alpha _4 = 0.2\), \(\alpha _5 = 0.1\), \(\omega = 0.1\), \(K = 0.5\), and \(\kappa = 0.4\), then get five equilibrium points (0, 0), (0.81, 0), \((-0.81,0)\), (0.51i, 0), and \((-0.51 i,0)\). As we see in Fig. 7 (0, 0) is the saddle and (0.81, 0), \((-0.81,0)\) are center points.

Phase portrait diagram when \(A>0\), \(B>0\), and \(C>0\).
Case 2: \(A<0\), \(B<0\), and \(C<0\).
We take different values of parameters \(\alpha _1 = 0.3\), \(\alpha _2 = -5\), \(\alpha _3 = 0.2\), \(\alpha _4 = 1\), \(\alpha _5 = 0.3\), \(\omega = -5\), \(K = 2\), and \(\kappa = -1.5\), then we get five equilibrium points (0, 0), (0.17, 0), \((-0.17,0)\), (0.10i, 0), and \((-0.10 i,0)\). As we analyze in Fig. 8, (0, 0) is the center point.

Phase portrait diagram when \(A<0\), \(B<0\), and \(C<0\).
Case 3: \(A<0\), \(B>0\), and \(C>0\).
We take different values of parameters \(\alpha _1 = 0.5\), \(\alpha _2 =2\), \(\alpha _3 = 0.6\), \(\alpha _4 = -3\), \(\alpha _5 = 0.4\), \(\omega = 5\), \(K = 1\), and \(\kappa = 0.8\), then we get five equilibrium points (0, 0), \((1-0.89 i,0)\), \((-1+0.89 i,0)\), \((1+0.88 i,0)\), and \((-1-0.88 i,0)\). As we see in Fig. 9 (0, 0) is the center point.

Phase portrait diagram when \(A<0\), \(B>0\), and \(C>0\).
Case 4: \(A>0\), \(B<0\), and \(C>0\).
We take various values of parameters \(\alpha _1 = 0.5\), \(\alpha _2 =2\), \(\alpha _3 = -1\), \(\alpha _4 = 3.0\), \(\alpha _5 = -0.5\), \(\omega = 1.0\), \(K = 1\), and \(\kappa = 1.2\), then we get five equilibrium points (0, 0), (1.43i, 0), \((-1.43 i,0)\), (1.06, 0), and \((-1.06 i,0)\). As we see in Fig. 10 (0, 0) is the saddle point and (1.06, 0), \((-1.06,0)\) are the center points.

Phase portrait diagram when \(A>0\), \(B<0\), and \(C>0\).
Case 5: \(A>0\), \(B>0\), and \(C<0\).
We take diverse values of parameters \(\alpha _1 = 0.5\), \(\alpha _2 =-2\), \(\alpha _3 = 1.0\), \(\alpha _4 = 3.0\), \(\alpha _5 = 0.5\), \(\omega = 1.0\), \(K = 1.0\), and \(\kappa = 1.2\), then get five equilibrium points (0, 0), \((0.63-0.92 i,0)\), \((-0.63+0.92 i,0)\), \((0.63+0.92 i,0)\), and \((-0.63-0.92 i,0)\). As we analyze in Fig. 11, (0, 0) is the saddle point.

Phase portrait diagram when \(A>0\), \(B>0\), and \(C<0\).
Case 6: \(A<0\), \(B<0\), and \(C>0\).
We take various values of parameters \(\alpha _1 = 1\), \(\alpha _2 =3\), \(\alpha _3 = -2\), \(\alpha _4 = -4\), \(\alpha _5 = -1\), \(\omega = 8.0\), \(K = 0.8\), and \(\kappa = 1.0\), then we get five equilibrium points (0, 0), \((0.81-1.03 i,0)\), \((-0.81+1.03 i,0)\), \((0.81+1.03 i,0)\), and \((-0.81-1.03 i,0)\). As we see in Fig. 12, (0, 0) is the center point.

Phase portrait diagram when \(A<0\), \(B<0\), and \(C>0\).
Case 7: \(A<0\), \(B>0\), and \(C<0\).
We take various values of parameters \(\alpha _1 = 1.0\), \(\alpha _2 =-5.21\), \(\alpha _3 = 1.5\), \(\alpha _4 = 22.69\), \(\alpha _5 = 3.57\), \(\omega = 10.0\), \(K = 1.0\), and \(\kappa = 1.2\), then we get five equilibrium points (0, 0), (1.57i, 0), \((-1.57 i,0)\), (1.14, 0), and \((-1.14,0)\). As we see in Fig. 13, (0, 0) is the center point and (1.14, 0), \((-1.14,0)\) are the saddle points.

Phase portrait diagram when \(A<0\), \(B>0\), and \(C<0\).
Case 8: \(A>0\), \(B<0\), and \(C<0\).
We take various values of parameters \(\alpha _1 = 0.5\), \(\alpha _2 =-3.0\), \(\alpha _3 = -1.0\), \(\alpha _4 = 4.0\), \(\alpha _5 = -0.5\), \(\omega = 1.0\), \(K = 1.0\), and \(\kappa = 1.2\), then we get five equilibrium points (0, 0), \((0.86-0.67 i,0)\), \((-0.86+0.67 i,0)\), \((0.86+0.67 i,0)\), and \((-0.86-0.67 i,0)\). As we see in Fig. 14, (0, 0) is the saddle point.

Phase portrait diagram when \(A>0\), \(B<0\), and \(C<0\).
Sensitivity analysis
For sensitivity analysis we will decompose the Eq. (60) into dynamical system as,
The system (62) explores how variations in initial conditions and parameters \(\alpha _1 = 0.8\), \(\kappa = 2\), \(\alpha _2 = 0.4\), \(K = 3\), \(\alpha _3 = 0.3\), \(\alpha _4 = 0.5\), \(\alpha _5 = 0.1\), and \(\alpha _6 = 0.5\) influence the system’s behavior. The system is governed by nonlinear terms that can yield to complex dynamics, making it highly sensitive to small variation in initial conditions. In Fig. 15a, where the system starts with (0.40, 0) and a slight perturbation is introduced by changing the initial conditions to (0.45, 0.01), there is a significant divergence between the two trajectories. This shows the system’s high sensitivity to initial conditions, characteristic of unstable or chaotic systems where small changes lead to large variations in the results.
In contrast, Fig. 15b present the system with different initial conditions (1.60, 1.02) and a slight changes in the initial values. The two curves in this plot show much less divergence, showing that the system is less sensitive to changes in initial conditions. This present that the system is operating in a more stable region, where minor variations do not significantly affect its trajectory. Thus, the comparison between the two figures indicates the system shows sensitive.

Sensitivity behavior of perturbed system (42) assuming the initial condition (a) (0.40, 0) for blue solid line and (0.45,0.01) for red dotted curve, (b)(1.60, 1.02) for blue solid line and (1.75, 1.4) red dotted curve.
Conclusion
In this research work, we successfully applied the Sardar sub-equation (SSE) method and the generalized unified method to solve the Perturbed Gerdjikov-Ivanov (PGI) equation. Through these two approaches, we achieved a variety of soliton solutions, including bright, dark, and singular solitons, identifying the versatility of the approaches in solving complex nonlinear equations. The novelty of this work lies in the application of fractional derivatives, particularly Atangana’s derivative, to the PGI equation, which introduces non-local effects and high-order dispersion. Moreover, the study provides a thorough dynamical and sensitivity analysis, presenting deeper understanding of the stability and behavior of the solutions under different conditions. The results of this research not only extend theoretical knowledge of nonlinear wave phenomena but also have significant implications for the nonlinear propagation of solitons in optical fibers, with potential applications in telecommunication system and other areas of nonlinear mathematical physics. The methods employed here exhibit their effectiveness and versatility in tackling a broad range of nonlinear problems, opening new ideas for future research in related fields.
Data availability
This study contains the data within the manuscript.
References
Chesnoy, J. (Ed.). Undersea Fiber Communication Systems. (Academic Press, 2015).
Chen, S., Ma, Y., Su, H., Fan, X. & Liu, Y. Few-mode fiber-based long-period fiber gratings: A review. J. Opt. Photon. Res. 1(1), 02–15 (2024).
Shakeel, M., Bibi, A., Chou, D. & Zafar, A. Study of optical solitons for Kudryashov’s quintuple power-law with dual form of nonlinearity using two modified techniques. Optik 273, 170364 (2023).
Zafar, A., Shakeel, M., Ali, A., Rezazadeh, H. & Bekir, A. Analytical study of complex Ginzburg–Landau equation arising in nonlinear optics. J. Nonlinear Opt. Phys. Mater. 32(01), 2350010 (2023).
Younis, M. et al. Perturbed optical solitons with conformable time-space fractional Gerdjikov–Ivanov equation. Math. Sci. 16, 431–443 (2022).
Eslamifar, M. & Eghbali, M. Nonlinear responses and optical limitation of copper nanoparticles by Z-scan method. J. Opt. Photon. Res. 1(3), 145–150 (2024).
Gu, Y., Peng, L., Huang, Z. & Lai, Y. Soliton, breather, lump, interaction solutions and chaotic behavior for the (2+ 1)-dimensional KPSKR equation. Chaos Solitons Fract. 187, 115351 (2024).
Gu, Y. et al. Soliton and lump and travelling wave solutions of the (3+ 1) dimensional KPB like equation with analysis of chaotic behaviors. Sci. Rep. 14(1), 20966 (2024).
Gu, Y., Jiang, C. & Lai, Y. Analytical solutions of the fractional Hirota-Satsuma coupled KdV equation along with analysis of bifurcation, sensitivity and chaotic behaviors. Fract. Fract. 8(10), 585 (2024).
Gu, Y., Zhang, X., Peng, L., Huang, Z. & Lai, Y. Lump and new interaction solutions of the (3+ 1)-dimensional generalized Shallow Water-like equation along with chaotic analysis. Alex. Eng. J. 126, 160–169 (2025).
Mathanaranjan, T. Optical solitons and stability analysis for the new (3+ 1)-dimensional nonlinear Schrödinger equation. J. Nonlinear Opt. Phys. Mater. 32(02), 2350016 (2023).
Mathanaranjan, T. New Jacobi elliptic solutions and other solutions in optical metamaterials having higher-order dispersion and its stability analysis. Int. J. Appl. Comput. Math. 9(5), 66 (2023).
Mathanaranjan, T., Hashemi, M. S., Rezazadeh, H., Akinyemi, L. & Bekir, A. Chirped optical solitons and stability analysis of the nonlinear Schrödinger equation with nonlinear chromatic dispersion. Commun. Theor. Phys. 75(8), 085005 (2023).
Mathanaranjan, T. Optical soliton, linear stability analysis and conservation laws via multipliers to the integrable Kuralay equation. Optik 290, 171266 (2023).
Al-Taie, M. S. J. Bright and dark soliton pulse in solid core photonic crystal fibers. J. Opt. Photon. Res. 1(1), 23–31 (2024).
Irshad, S., Shakeel, M., Bibi, A., Sajjad, M. & Nisar, K. S. A comparative study of nonlinear fractional Schrödinger equation in optics. Mod. Phys. Lett. B 37(05), 2250219 (2023).
Cinar, M. et al. Derivation of optical solitons of dimensionless Fokas–Lenells equation with perturbation term using Sardar sub-equation method. Opt. Quant. Electron. 54, 402 (2022).
Rehman, H. U., Habib, A., Abro, K. A., Awan, D., & Ullah, A. Study of Langmuir waves for Zakharov equation using Sardar sub-equation method. Int. J. Nonlinear Anal. Appl. (2023).
Osman, M. et al. The unified method for conformable time fractional Schrödinger equation with perturbation terms. Chin. J. Phys. 56(5), 2500–2506 (2018).
Asjad, M. I. et al. Traveling wave solutions to the Boussinesq equation via Sardar sub-equation technique. AIMS Math. 7(6), 11134–11149 (2022).
Aydemir, T. Application of the generalized unified method to solve (2+1)-dimensional Kundu-Mukherjee-Naskar equation. Opt. Quant. Electron. 55, 534 (2023).
Younas, U., Hussain, E., Muhammad, J., Garayev, M. & El-Meligy, M. Bifurcation analysis, chaotic behavior, sensitivity demonstration and dynamics of fractional solitary waves to nonlinear dynamical system. Ain Shams Eng. J. 16(1), 103242 (2025).
He, Y., Zio, E., Yang, Z., Xiang, Q., Fan, L., He, Q. & Zhang, J. A systematic resilience assessment framework for multi-state systems based on physics-informed neural network. Reliab. Eng. Syst. Saf. 110866 (2025).
Li, J. et al. A secure data storage and sharing scheme for port supply chain based on blockchain and dynamic searchable encryption. Comput. Stand. Interfaces 91, 103887 (2025).
Bibi, I., Muhammad, S., Shakeel, M. & Ceesay, B. Optical soliton structure solutions, sensitivity, and modulation stability analysis in the chiral nonlinear Schrödinger equation with Bohm potential. Adv. Math. Phys. 2025(1), 9185387 (2025).
Xu, Y. et al. Robust non-fragile finite frequency \(H^{\infty }\) control for uncertain active suspension systems with time-delay using TS fuzzy approach. J. Franklin Inst. 358(8), 4209–4238 (2021).
Zhao, J. et al. Multi-objective frequency domain-constrained static output feedback control for delayed active suspension systems with wheelbase preview information. Nonlinear Dyn. 103(2), 1757–1774 (2021).
Li, W., Xie, Z., Wong, P. K., Mei, X. & Zhao, J. Adaptive-event-trigger-based fuzzy nonlinear lateral dynamic control for autonomous electric vehicles under insecure communication networks. IEEE Tran. Indus. Electron. 68(3), 2447–2459 (2020).
Wu, Y. & Shen, T. A finite convergence criterion for the discounted optimal control of stochastic logical networks. IEEE Trans. Autom. Control 63(1), 262–268 (2017).
Biswas, A. & Alqahtani, R. T. Chirp-free bright optical solitons for perturbed Gerdjikov-Ivanov equation by semi-inverse variational principle. Optik 147, 72–76 (2017).
Kaur, L. & Wazwaz, A. M. Optical solitons for perturbed Gerdjikov-Ivanov equation. Optik 174, 447–451 (2018).
Yaşar, E., Yıldırım, Y. & Yaşar, E. New optical solitons of space-time conformable fractional perturbed Gerdjikov-Ivanov equation by sine-Gordon equation method. Results Phys. 9, 1666–1672 (2018).
Arshed, S. et al. Optical soliton perturbation for Gerdjikov-Ivanov equation via two analytical techniques. Chin. J. Phys. 56(6), 2879–2886 (2018).
Biswas, A. et al. Optical soliton perturbation for Gerdjikov Ivanov equation by extended trial equation method. Optik 158, 747–752 (2018).
Biswas, A. et al. Optical soliton perturbation with full nonlinearity for Gerdjikov-Ivanov equation by trial equation method. Optik 157, 1214–1218 (2018).
Atangana, A., Baleanu, D. & Alsaedi, A. Analysis of time-fractional Hunter-Saxton equation: A model of neumatic liquid crystal. Open Phys. 14(1), 145–149 (2016).
Kilbas, A. A., Srivastava, H. M., & Trujillo, J. J. Theory and Applications of Fractional Differential Equations. Vol. 204. (Elsevier, 2006).
Podlubny, I. Fractional Differential Equations: An Introduction to Fractional Derivatives, Fractional Differential Equations, to Methods of Their Solution and Some of Their Applications (Elsevier, 1998).
Khalil, R., Al Horani, M., Yousef, A. & Sababheh, M. A new definition of fractional derivative. J. Comput. Appl. Math. 264, 65–70 (2014).
Atangana, A., Baleanu, D. & Alsaedi, A. Analysis of time-fractional Hunter-Saxton equation: A model of neumatic liquid crystal. Open Phys. 14(1), 145–149 (2016).
Sulaiman, T. A., Yel, G. & Bulut, H. M-fractional solitons and periodic wave solutions to the Hirota-Maccari system. Mod. Phys. Lett. B 33(05), 1950052 (2019).
Sousa, J. V. D. C., & de Oliveira, E. C. A new truncated \(M\)-fractional derivative type unifying some fractional derivative types with classical properties. arXiv preprint arXiv:1704.08187 (2017).
Podlubny, I. Fractional Differential Equations: An Introduction to Fractional Derivatives, Fractional Differential Equations, to Methods of Their Solution and Some of Their Applications (Elsevier, 1998).
Atangana, A., & Baleanu, D. New fractional derivatives with nonlocal and non-singular kernel: Theory and application to heat transfer model. arXiv preprint arXiv:1602.03408 (2016).
Zălinescu, C. On the use of semi-closed sets and functions in convex analysis. Open Math. 13(1), 000010151520150001 (2015).
Fan, E. Soliton solutions for a generalized Hirota-Satsuma coupled KdV equation and a coupled MKdV equation. Phys. Lett. A 282(1–2), 18–22 (2001).
Triki, H., Yildirim, A., Hayat, T., Aldossary, O. M. & Biswas, A. 1-Soliton solution of the generalized resonant nonlinear dispersive Schrödinger’s equation with time-dependent coefficients. Adv. Sci. Lett. 16(1), 309–312 (2012).
Khodadad, F. S., Nazari, F., Eslami, M. & Rezazadeh, H. Soliton solutions of the conformable fractional Zakharov-Kuznetsov equation with dual-power law nonlinearity. Opt. Quantum Electron. 49(11), 1–12 (2017).
Xu, Y. G., Zhou, X. W. & Yao, L. Solving the fifth order Caudrey-Dodd-Gibbon (CDG) equation using the exp-function method. Appl. Math. Comput. 206(1), 70–73 (2008).
Onder, I., Secer, A., Ozisik, M., & Bayram, M. Investigation of optical soliton solutions for the perturbed Gerdjikov-Ivanov equation with full-nonlinearity. Heliyon 9(2) (2023).
Ismael, H. F., Baskonus, H. M., Bulut, H. & Gao, W. Instability modulation and novel optical soliton solutions to the Gerdjikov-Ivanov equation with M-fractional. Opt. Quantum Electron. 55(4), 303 (2023).
Funding
This work was supported and funded by the Deanship of Scientific Research at Imam Mohammad Ibn Saud Islamic University (IMSIU) (grant number IMSIU-DDRSP2503).
Author information
Authors and Affiliations
Contributions
MS: Investigation, writing of the original draft, methodology, software use, investigation; FSA: Reviewing, formal analysis, validation; HGA: Visualization, manuscript editing.
Corresponding author
Ethics declarations
Competing interests
The authors declare no competing interests.
Additional information
Publisher’s note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
Open Access This article is licensed under a Creative Commons Attribution-NonCommercial-NoDerivatives 4.0 International License, which permits any non-commercial use, sharing, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons licence, and indicate if you modified the licensed material. You do not have permission under this licence to share adapted material derived from this article or parts of it. The images or other third party material in this article are included in the article’s Creative Commons licence, unless indicated otherwise in a credit line to the material. If material is not included in the article’s Creative Commons licence and your intended use is not permitted by statutory regulation or exceeds the permitted use, you will need to obtain permission directly from the copyright holder. To view a copy of this licence, visit http://creativecommons.org/licenses/by-nc-nd/4.0/.
About this article

Cite this article
Shakeel, M., Alshammari, F.S. & Ahmadzai, H.G. Optical soliton solutions, dynamical and sensitivity analysis for fractional perturbed Gerdjikov–Ivanov equation. Sci Rep 15, 30843 (2025). https://doi.org/10.1038/s41598-025-09571-1
Received:
Accepted:
Published:
Version of record:
DOI: https://doi.org/10.1038/s41598-025-09571-1
Keywords
This article is cited by
-
Pure-cubic form of the Nonlinear Schrödinger Model with the Polynomial Laws Excluding the Chromatic Dispersion via the New Kudryashov’s Integration Algorithm
International Journal of Theoretical Physics (2026)
