
Abstract
Due to the rapid growth of unmanned aerial vehicles (UAVs), their spectrum resources become scarce, leading to UAVs requiring spectrum prediction to share the spectrum with other users. However, contemporary prediction methods may have difficulty in predicting the spectrum states at the next location, because the UAVs cannot obtain the historical data in advance to train prediction models. This paper introduces a temporal-spatial spectrum prediction approach for arbitrary flight within a specific region. The main issue involves the estimation of historical data at the next location during flight, accomplished through the concept of homotopy theory (HT). First, the HT is extended from two objects to multiple objects. Then, the historical data is estimated by homotopy mapping, which is derived by the boundary conditions of the HT and the physical meanings of the model parameters. Finally, the spectrum is predicted by the hidden Markov model (HMM) using the HT estimated data, referring to the multiple objects HT-HMM (MOHT-HMM) based prediction method. The main innovation is to use the HT to estimate the historical data at the next location, avoiding the non-stationarity and correlation issues of the spectra. Experimental results using real measured civil aviation data show the efficacy of the MOHT-HMM in accurately predicting UAV spectrum during arbitrary flights within a preset area.
Similar content being viewed by others

Introduction
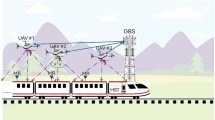
As 6G has proposed to connect various applications, including air/space and ground communications1,2,3,4, unmanned aerial vehicle (UAV) communications become an indispensable technology and bring rapidly growing use5,6. UAVs carry out diverse missions with various flight paths. For instance, in applications like traffic monitoring and power line inspection, they fly along straight lines, whereas in tasks such as square security, agricultural monitoring and water surface monitoring they may fly randomly within a fixed area. Spectrum is currently allocated in a fixed assignment policy in China7, shown in Fig. 1. It can be observed that these bands are limited, implying that the limited spectrum resources may not be able to meet the growing demand for UAV communications, leading to sharing spectrum with other users8,9,10.

The spectrum allocation of UAVs in China7.
There are many reports focus on spectrum sharing in literature. For example, for spectrum sensing in 3D space, a three-color layer model is introduced including several spectrum sensing algorithms as well as a power control scheme, by considering the correlation of temporal-spatial11. For the case of multiple nodes, the research on integrated sensing and communications considers collaborative spectrum sensing and edge computing12. Spectrum occupancy rate is also a topic of great interest. In literature, UAVs are used to measure the 3D spectrum occupancy map within a specific space13. Regarding other topics in spectrum sharing, such as throughput, a convex optimization method is studied to improve the throughput of a UAV network and increases the performance by \(500\%\)14. As an important process in spectrum sharing, spectrum prediction can infer possible spectrum holes and thus improve spectrum sensing efficiency by analyzing spectrum historical data15,16,17. Many works have investigated the spectrum prediction approaches18, including autoregressive model19, machine learning20,21, hidden Markov model (HMM)22,23,24,25, and long short-term memory (LSTM)26,27. Experiments show that these methods are effective in predicting the spectrum states. For example, the average accuracy of the LSTM based method can reach 85%27, and the accuracy of the HMM based approach is higher than 80%25.
Unfortunately, these good methods may not apply to UAV communication scenarios. The rapid movement of the UAV will lead to rapid changes in the communication environment, while the UAV communication channel is non-stationary28,29,30. In other words, the spectrum state changes in the joint dimension of temporal and spatial. However, the reported methods mainly predict the spectrum state in the temporal dimension without considering the spectrum changes in the spatial dimension. Therefore, they are suitable for stationary or low-speed mobile users, where the communication environment can be regarded as invariant in the spatial dimension, as shown in Fig. 2a. That means the reported methods predict spectrum states for “next moment, same location”. For UAV users, the communication environment changes rapidly, resulting in the prediction based on the current location is not accurate at the next location, as shown in Fig. 2b. This issue was elaborated in Fig. 2 of Reference8 as follows. For rapidly-moving UAV users, by the time the prediction is accomplished, the UAV has moved to the next location. Since the prediction result is for the previous location, it is inapplicable to the next location. Consequently, the UAV needs to predict the spectrum states for “next moment, next location”. This is the main research gap, as the methods in the literature generally predict for “next moment, same location”.

Two examples: (a) cellphone user: the spectrum environment is unchanged; (b) UAV: the user flies from a radar environment to a BS environment.
The reported methods cannot predict the spectrum state at the next location mainly because they may not obtain the historical data at the next location in advance. They usually need historical data to train the prediction models. However, when the UAV is at the current location, these methods are unable to measure the historical data of the next location. This is because the UAV has not yet reached the next location. Thus, how to obtain the historical data of the next location is the main challenge. The significance of our method is to provide historical data of un-reached locations for prediction models, so that UAVs can predict the spectrum of locations that have not yet been flown.
A possible solution to this challenge is estimating the historical data of the next location by using some known historical data of specific locations. For instance, we can place sensing devices at several specific locations to measure local historical data, and then estimate historical data at other locations based on the channel characteristics of the flight area. However, since the UAV channel is highly non-stationary and dynamic in both temporal and spatial dimensions28,29,30, the spectral state statistics may not follow the same distribution. Additionally, in the area where users are usually all associated with a communication base, the spectrum usages at different locations are not independent of each other. In other words, when the channel fails to meet the independent and identically distributed (i.i.d.) conditions, statistical methods like the central limit theorem may not be applicable for determining the channel’s statistical characteristics. Consequently, traditional estimation methods relying on conventional statistical models may not work well. Hence, in this paper, we prefer methods that do not depend on statistics, and the homotopy theory (HT) is considered.
Homotopy is a topological mathematics concept describing a continuous transformation from one object to another31,32,33. The two objects are homotopically related, and a homotopy relation can describe any intermediate form in the continuous change. In other words, the HT focuses on analyzing the relation between the two objects without involving issues related to statistics. In UAV communications, the spectral states are spatially related, similar to the homotopy concept. Thus, we consider using the HT to describe the spectral features at different locations. Once the homotopy mapping is established, we can estimate the historical data of unknown locations based on that of known locations. Finally, the spectrum states of the next location can be predicted by the estimated historical data of the next location.
In our previous works, we proposed a homotopy based algorithm called the HT-HMM to predict spectrum states of “next time, next location”34,35. It estimates the historical data of the next locations by using the historical data of two specific known locations based on the HT, and then predicts through the HMM. The real data experiments show that the HT-HMM achieves an accuracy of 85% \(\sim\) 95%34. However, this method can only apply to the scenario where the UAV flies along a straight line between two pre-set locations. This is because the concept of HT only refers to two objects. In the UAV scenario, the two locations originate from these two objects, leading to the fact that the corresponding homotopy relation can only describe the cases between the two locations. Unfortunately, the UAV flight path is complex in practice, e.g., flying in an area, while the HT with two objects cannot deal with.
To solve the limitation of the HT-HMM algorithm, we propose a new algorithm that can be applied to the scenario where the UAV flies arbitrarily in an area rather than just a straight line. We first extend the HT from two objects to multiple objects, enabling homotopic changes to occur on a plane rather than merely along a straight line. Subsequently, the homotopy relation is derived by considering the boundary conditions of the homotopy family function, and the physical meanings of the model parameters. Then, the historical data of the next location is estimated by the homotopy relation and provides the parameters of the HMM based prediction model. The objective of our work is to predict the spectrum state of “next moment, next location” by using the HMM with the homotopic estimation. Finally, the proposed method is called the multiple objects HT-HMM (MOHT-HMM) based prediction and verified by real measured civil aviation signals.
The main contributions of this paper are as follows:
-
The concept of multi-object homotopy is proposed. In topological mathematics, the classical HT describes the transformation between only two objects. However, in practical applications, it may be insufficient to deal with some complex scenarios with just two objects. Consequently, the homotopy formula has been generalized by extending it to multiple objects. It can be used not only for spectrum prediction but also for other fields, such as material mechanics, electrical grids and image reconstruction.
-
The homotopy relation formulas are derived based on the multiple objects HT. Specifically, the historical spectrum data is represented by two parameters in the HMM, i.e., the state transition probability matrix and the observation sequence. Based on the constraints of the parameters and the boundary conditions of the HT, we derived the formulas for their homotopy relations. According to these formulas, the parameters of arbitrary locations can be estimated. Thus, the historical data of the next location can be obtained through the homotopy based estimation, and then used as the input of HMM to predict the spectrum.
-
The MOHT-HMM based spectrum prediction algorithm is proposed to predict the spectrum at any location within a fixed area. Experimental results based on the measured data of civil aviation signals show that the proposed algorithm can predict the spectrum states without the historical data of the next location. The Bayesian based prediction probability is also analyzed to demonstrate the robustness of the proposed method.
The novel contribution is that we derived the multiple object homotopy relations to estimate the historical spectrum data at arbitrary locations. The significant problem in this paper is how to obtain the historical data of the next location, and this problem is solved through the multiple object homotopy relation. In the literature, prediction methods usually cannot predict the spectrum of other locations, and traditional estimation methods are not applicable to non-stationary and correlated spectra. Therefore, extending the HT to multiple objects and then applying it in spectrum estimation is an effective way for UAV spectrum prediction.
The rest of this paper is organized as follows. “Related works” reviews some basic definitions, including the HMM and HT. “The communication scenario” describes a communication scenario for UAVs flying in a region. We introduce the concept of MOHT for multiple objects in “Multiple objects homotopy theory”. In “ The MOHT-HMM based spectrum prediction”, the MOHT-HMM based spectrum prediction is proposed. Two examples of 2-objects and 3-objects are presented in “Example-I: two objects” and “Example-II: three objects”, including experimental results. Finally, we conclude this article in “Conclusions”.
Related works
In this paper, we use the concept of HT to refine the HMM model for our spectrum prediction method. This section gives an overview of the basic concepts of HMM and HT.
Hidden Markov model based prediction
The HMM can be summarized as a hybrid model consisting of two processes: the change of hidden state is a Markov process that is not directly observable, and the observation of a particular hidden state is a random process23,36. In UAV communications, the spectrum state of the primary user cannot be directly obtained by the UAV, referred to as the hidden state. Instead, the UAV can only use sensing equipment to measure the spectrum state of the primary user, referred to as the observation of the hidden state. In fact, the measured spectrum state is the historical data. The UAV analyzes the inherent correlation of the historical data through the HMM to find the possible idle spectrum, avoiding interference with the primary user8,34.
The HMM can be described by three parameters: the state transition probability matrix \(\bf{A}\), the observation probability matrix \(\bf{B}\) and the initial state probability distribution \({\Pi }\)24,37. Generally, the primary user states can be described as either busy or idle, represented in binary sequences. Here we use 0 or 1 to indicate the spectrum state idle or busy, respectively38,39. The observation and the hidden state sequences are denoted as \({\bf O}=\{o_k\}\) and \({\bf Q}=\{q_k\}\), respectively. We define \(q_k\in \{0,1\}\) as the primary user spectrum occupancy state at the kth time slot, which only depends on the previous state \(q_{k-1}\). The state transition probability matrix \({\bf A}\) is given by
The UAV observation of the spectrum at the kth time slot is defined as \(o_k \in \{0,1\}\), which only relies on the hidden state \(q_k\) at the current time. The observation probability matrix \({\bf B}\) can be formulated as
The initial state probability refers to the state probability of the spectrum at the first moment, thus the initial state probability distribution \(\mathrm {\Pi }\) can be defined as
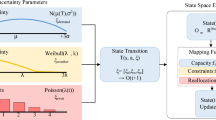
The HMM based method makes predictions according to the following three steps15, as shown in Fig. 3:
Step 1-HMM training: Use the Baum-Welch algorithm to train the observation sequence \({\bf O}\) to generate parameters \(\Lambda = ({\bf A},\;{\bf B},\;\mathrm {\Pi })\).
Step 2-Spectrum state sequence decoding: Use the Viterbi algorithm to trace back the most likely hidden state sequence \({\bf Q} = \arg \max P({\bf Q},\;{\bf O}|\Lambda )\).
Step 3-Spectrum occupancy decision: Calculate and compare \(P({\bf Q}, \;1 | \Lambda )\) and \(P({\bf Q}, \;0 | \Lambda )\), and infer the spectrum state for the next moment:
If this decision matches the subsequent spectrum sensing results, it indicates that the prediction objective based on the HMM has been achieved.

A process of the HMM based spectrum prediction.
Homotopy theory
Homotopy theory has been applied in applications such as material mechanics40, electrical grids41 and image reconstruction42 to solve non-linear problems. The notion of homotopy in mathematics describes a continuous change between two objects31,43. If one can be deformed into another through continuous transformations, we call them homotopy41,44,45,46,47. It defines mappings between two objects that have the same properties in some aspects. Notably, the indispensable condition for homotopy is continuous change. The formula of homotopy can be defined as
where f(x) and g(x) are functions of two objects, h is called a homotopy parameter whose value is in the interval [0, 1]31,43,46,48. As h increases from 0 to 1, H(x; h) continuously varies from f(x) to g(x). For example, two functions \(f(x)=1.5 \sin (2\pi x)\) and \(g(x)=20x(x-0.5)\) in the interval \(x\in [0,1]\) can be connected by constructing such a family of functions as
where \(h \in [0,1]\). It is observed that
As shown in Fig. 4, H(x; h) continuously changes from a sine function f(x) to a polynomial one g(x) when h increases from 0 to 1.

An example for the homotopy changing.
We can describe the HT in a more general form31
where x is the function variable of two objects, \(k_1(h)\) and \(k_2(h)\) are kernel functions of h. H(x; h) is called a homotopy family and satisfies the boundary relation in (7). In topology, we can record this homotopic transformation as H : \(f(x) \sim g(x)\)32,49.
The communication scenario
In practical applications, UAVs may perform flight missions over a specific area, such as patrol drones in the mining area. The UAV will fly over many locations in the area, and it is not practical for us to obtain historical information on all these locations in advance due to either time constraints or equipment costs. Assuming the flight area of the UAV is fixed in a task, we can select several positions at the edge of the area denoted as \(L_m^{\text {kn}}\), \((m= 1,...,M)\), which are connected in turns to surround the area. Sensing equipment can be pre-set at these locations to get spectrum sensing sequences \({\bf O}_1 ^{\text {kn}},...,{\bf O}_M ^{\text {kn}}\) to be the historical information. Therefore, these positions \(L_m^{\text {kn}}\) are considered “Known Locations” where historical information can be measured. We defined \(L_n^{\text {ukn}}\), \((n=1,...,N)\), as an arbitrary location that the UAV flies over in the area without any sensing equipment. In other words, positions \(L_n^{\text {ukn}}\) are considered “Unknown Locations” since the UAV cannot obtain historical spectrum sensing data in advance, as shown in Figure 5. When the UAV is at \(L_{n-1}^{\text {ukn}}\), we need to predict the spectrum state of the next location \(L_n^{\text {ukn}}\) for the next moment.

An example of the UAV communication scenario in a fix area (the number of Known Locations \(M=4\)).
In the HMM, several parameters, including \({\bf A}\), \({\bf B}\), \(\mathrm {\Pi }\), and the historical sequence \({\bf O}\) are input to compute the probability of the next moment state. In our scenario, the sequence \({\bf O}\) consists of the spectrum states and varies at different locations28,29,30. Also, the state transition probability matrix \({\bf A}\) is changing accordingly. The emission probability matrix \({\bf B}\) is associated with the missed detection and the false alarm probabilities of the sensing equipment, which is unrelated to the position changing19. Similarly, the initial state probability distribution \(\mathrm {\Pi }\) is also stationary to the location changing34. Therefore, we default that \({\bf B}\) and \(\mathrm {\Pi }\) do not change with the position, as the following:
where \({\bf B}\) and \(\mathrm {\Pi }\) are constants that can be obtained by the Baum-Welch algorithm training using \({\bf O}\) at Known Locations. Therefore, in UAV spectrum prediction, it is required to estimate the state transition probability matrix \({\bf A}\) and the spectrum sensing sequence \({\bf O}\) at unknown locations during the flight.
Multiple objects homotopy theory
We consider the HT to estimate \({\bf A}\) and \({\bf O}\) at unknown locations. The main idea is to map the homotopic objects into the historical data at Known Locations, and then derive the homotopy relation of this homotopy family. In this way, all the historical information at unknown locations in the homotopy family can be estimated by solving the homotopy relation. However, since the classical HT only has two objects, only two locations can be mapped to be the Known Locations. This implies that the UAV can only fly along a straight line between these two locations34,35, as shown in Fig. 6. If the UAV flies along arbitrary routes in a specific area, at least three Known Locations are required to denote this area. Therefore, we should extend the HT for multiple objects to map several Known Locations.

The mapping between the classical HT and UAV communication scenario.
Similar to the classical HT with two objects, the multiple objects HT (MOHT) intends to define the relation of continuous change between multiple objects. We define the MOHT formula as:
where \(f_m(x)\) and \(k_m ({{\bf h}})\) are the mth object function and corresponding kernel function. Here \({\bf h}\) is a vector containing multi-dimensions as
This is because one dimension cannot distinguish M objects for \(M>2\), unless all M objects belong to the same family (e.g., all M locations are on the same straight line). For instance, \({\bf h}\) should contain two dimensions for the scenario in Fig. 5. The range of values of all elements in \({\bf h}\) is determined by the M objects \(f_1(x),...,f_M(x)\). That is, the range of \({\bf h}\) is the union of M boundary values marking M objects, denoting as
When \({\bf h}\) changes continuously, \(H(x;{{\bf h}})\) also changes continuously.
As mentioned in “Homotopy theory”, when the homotopy parameter \({\bf h}\) takes the boundary value 0 or 1, H(x; h) becomes one object f(x) or g(x)31. Similarly, the MOHT should have the following cases:
-
For \({\bf h}=\mathrm{{bound}}_1\), we have \(k_1 ({\bf h})=1\), \(k_m ({\bf h})=0\) for \(m=2,...,M\), and the homotopy function \(H(x;{{\bf h}})=f_1 (x)\);
-
For \({\bf h}=\mathrm{{bound}}_2\), we have \(k_2 ({\bf h})=1\), \(k_m ({\bf h})=0\) for \(m=1,3,...,M\), and the homotopy function \(H(x;{{\bf h}})=f_2 (x)\);
-
For \({\bf h}=\mathrm{{bound}}_i\), we have \(k_i ({\bf h})=1\), \(k_m ({\bf h})=0\) for \(m=1,...,M\), \(m\ne i\), and the homotopy function \(H(x;{{\bf h}})=f_i (x)\).
That is, if the homotopy parameter \({\bf h}\) equals the ith boundary value, the homotopy function becomes the function of the ith object. In general, the MOHT illustrates a continuous change limited to the range determined by the M objects. An example with three objects having two dimensions in \({\bf h}\) is shown in Fig. 7, which depicts the multiple object homotopy family. The functions of the three objects are a convex function, a concave function, and a sine function. In the region between these three objects, the homotopy family function \(H(x;{{\bf h}})\) is influenced by the three objects simultaneously, and the closer \(H(x;{{\bf h}})\) is to someone object, the more \(H(x;{{\bf h}})\) resembles it.

An example of the MOHT with 3 objects (\(M=3\)) and \({\bf h}\) has two dimensions \(\{h_I,h_{II}\}\).
The MOHT-HMM based spectrum prediction
This section will present the estimation of \({\bf A}\) and \({\bf O}\) using the MOHT, and then predict the spectrum based on the HMM.
Estimation of \({\bf A}\)
A communication system with a base station usually has more users as they are closer to the base station, since the signal power of the base station is higher. Therefore, the spectrum usage status continuously changes with the distance from the users to the base station34,35. For example, when the UAV is flying from \(L_1^{\text {kn}}\) to \(L_2^{\text {kn}}\), the transition probability matrix \({\bf A}\) is assumed to change from \({{\bf A}}_1^{\text {kn}}\) to \({{\bf A}}_2^{\text {kn}}\) continuously. This is similar to the continuous transformation in the concept of homotopy. It is required to construct a homotopy mapping between Known Locations to estimate \({\bf A}\) of the unknown locations. Obviously, the embedded parameter \({\bf h}\) is a distance related parameter in this scenario. Therefore, we assume the following formula based on MOHT as
where \(n=1,...,N\), \(m=1,...,M\), \({{\bf A}}_n^{\text {ukn}}\) and \({{\bf A}}_m^{\text {kn}}\) denote the matrix \({\bf A}\) at \(L_n^{\text {ukn}}\) and \(L_m^{\text {kn}}\), respectively. \(d_{n,m}\) represents the distance between \(L_n^{\text {ukn}}\) and \(L_m^{\text {kn}}\) as
where (x, y) means the coordinates, and we can denote the locations as \(L_n^{\text {ukn}} (x_n,y_n)\) and \(L_m^{\text {kn}} (x_m,y_m)\). In the scenario, we have M Known Locations corresponding to M objects, and N unknown locations that need prediction. Besides, we define \(D_{ij}\) represents the distance between Known Locations \(L_i^{\text {kn}} (x_i,y_i)\) and \(L_j^{\text {kn}} (x_j,y_j)\) as
Obviously, \(D_{ij}\) is a constant, shown in Fig. 5.
As Tobler’s first law of geography states that “Everything is related to everything else, but near things are more related than distant things”50,51, it can be set that
Thus, we can assume
where \(\alpha _1\) is a control variable. Therefore, we get the following formula
When the UAV is at Known Location \(L_1^{\text {kn}} (x_1,y_1)\), we have
According to (19) and (20), it is easy to derive
Combine (20) and (22), since \(D_{1m}\) is not 0 and \(d_{n,1}\) is 0, we can infer that
where \(\alpha _2\) is another control variable. Similarly, when the UAV is at Known Location \(L_2^{\text {kn}} (x_2,y_2)\), we can get
From the above equations, we can infer that
where \(\alpha _3\) is the 3rd control variable. By deducing the situation of UAV at each Known Location in the same way, for the last Known Location \(L_M^{\text {kn}} (x_M,y_M)\), we have
where \(\alpha _M\) is the Mth control variable and we have
Therefore the Eq. (14) can be rewritten as
Because the state transition probability matrix \({{\bf A}}\) has the following structure
Equation (27) can be further expressed as
since
According to the definition of A in (1), there is a relation as
We can sum the two equations in (29)–(30) and obtain
Since
we can further obtain
and then
By substituting (36) into (27), we can obtain
where \(d_{n, m}\) represents the distance between \(L_n^{\text {ukn}}\) and \(L_m^{\text {kn}}\) defined in (15). This expression is the solution of (11) for estimating \({{\bf A}}\), where the object function \(f_m(x)\) corresponds to \({{\bf A}}_m^{\text {kn}}\), the homotopy parameter \({\bf h}\) has two dimensions \(\{h_I, h_{II}\}\) corresponding to location coordinates \(\{x,y\}\), and the independent variables of the kernel function \(k_m({\bf h})\) in (37) are the coordinates \(\{x,y\}\). In this way, the state transition probability matrix \({\bf A}\) at the unknown locations can be estimated by those at the Known Locations based on the above homotopy relation.
Estimation of \({\bf O}\)
Next, we introduce the spectrum sensing sequence \({\bf O}\) estimation at unknown locations. Literature shows that \({\bf O}\) follows the Poisson distribution15,18,52,53, which is
In our scenario, the Poisson parameter \(\lambda\) is considered the frequency occupied by 1 or 0 in the sequence \({\bf O}\). For instance, \(\lambda ^{(1)}\) denotes the occupancy rate of primary users. Therefore, the estimation of \({\bf O}\) becomes to estimate \(\lambda\) first, and then generate \({\bf O}\) by \(\lambda\) using the Poisson distribution in (38).
Similar to the previous subsection, we set \(\lambda _n^{\text {ukn}}\) to be the \(\lambda\) at the nth unknown location \(L_n^{\text {ukn}}\) and construct the following formula by the homotopy way
where \(\lambda _m^{\text {kn}}\) denotes the \(\lambda\) at the mth Known Location \(L_m^{\text {kn}}\). Because the boundary conditions here are the same as those for matrix \({\bf A}\) in (20)–(25), we can follow the same way of the estimation for matrix \({\bf A}\) to assume \(k_m(d_{n,m})= \beta _1 / d_{n,m}\) and then obtain
where \(\beta _1\) and \(\beta _M\) are unknown control variables.
By denoting the occupancy rates of primary users as \(\lambda _n^{(1,\text {ukn})}\), \(\lambda _m^{(1,\text {kn})}\), and the probability of 0-state in \({\bf O}\) as \(\lambda _n^{(0,\text {ukn})}\), \(\lambda _m^{(0,\text {kn})}\), we have
Following the same derivation in (29)–(36), it is obtained
which is the same as in (36). Therefore, the homotopy relations of the Poisson parameter are expressed as
In experiments, we mainly concern \(\lambda _n^{(1,\text {ukn})}\) since only one Poisson parameter needs to be estimated. Therefore, we generally use \(\lambda _n^{\text {ukn}}\) to refer to \(\lambda _n^{(1,\text {ukn})}\) in the following content. After \(\lambda _n^{\text {ukn}}\) is estimated, the spectrum sensing sequence \({\bf O}\) can be generated as the historical data for HMM training.
The MOHT-HMM based prediction
After estimating \({{\bf A}}_n^{\text {ukn}}\) and \({{\bf O}}_n^{\text {ukn}}\), we can implement Steps 2 and 3 of the HMM algorithm mentioned in Section Hidden Markov Model based Prediction to predict the spectrum state at \(L_n^{\text {ukn}}\). The detailed steps of the MOHT-HMM based spectrum prediction are shown in Fig. 8. In this way, the method can predict the spectrum state anywhere in the region without requiring much historical data. If the predicted result is idle, the drone will take the spectrum sensing further. If the prediction result is occupied, the drone will discard this frequency band and find another one to repeat the prediction process.
The following sections investigate examples of two and three objects, including real measured data experiments on the spectrum prediction.
Example-I: two objects
\(M=2\): the definition
When the Known Location number \(M=2\), the scenario degrades into a classical homotopy issue with two objects. We have discussed the case of \(M = 2\) in previous works. These works indicate that the UAV flies along a straight path34,35, as shown in Figure 9. For example, the UAV flies over a section of highway to monitor traffic conditions. According to (37), the matrix \({\bf A}\) is given by

The procedure of the MOHT-HMM based spectrum prediction.

where \(D_{12}\) denotes the distance between two Known Locations and
Expression (46) is just the Eq. (16) in34, having the same form as the classical homotopy formula that is the expression (5) in “Homotopy theory”.
According to (45), the Poisson parameter \(\lambda\) for \(M=2\) is
which is the Eq. (24) in34.
Experimental results
The previous work in34 shows an experiment to test the homotopy and HMM based spectrum prediction, i.e., the HT-HMM method. In the experiment, the Chengdu Shuangliu International Airport and the Chengdu Technological University were set as the Known Locations \(L_1^{\text {kn}}\) and \(L_2^{\text {kn}}\), respectively. The distance between them is \(D_{12} = 25.46\) km. Among them, we had 5 middle locations tested by the HT-HMM, listed in Table 1 (i.e., Table 1 in34).

The prediction probabilities of classic HMM, MM and HT-HMM based approaches. This figure is just the Fig. 8(a) in34.
The experimental results are presented in Fig. 10 (i.e., Fig. 8(a) in34), indicating that the HT-HMM based prediction probability is between \(85\%\) and \(95\%\) at \(L_1^{\text {ukn}} \sim L_5^{\text {ukn}}\). It is worth pointing out that the prediction probabilities based on our method are lower than those based on the other two methods, including the HMM and the Markov model (MM). The reason is that these two methods use real measured data as the model input sequence \({{\bf O}}\), while the HT-HMM inputs the estimated data. Since the estimated \({{\bf A}}\) and \({{\bf O}}\) have errors compared to the real ones, the HT-HMM based performance degrades a little. However, in practice, getting the measured data at the middle locations on the UAV flight is difficult, implying that the methods requiring measured data may not be available.
Example-II: three objects
\(M=3\): the definition
Here is the second example for our MOHT-HMM based prediction when \(M=3\), which is the main issue of the paper. According to the concept of MOHT described in Fig. 7, three objects can form a plane, allowing the drone to fly freely within that plane rather than only flying along a straight line. For example, UAVs fly randomly in a square to ensure people’s safety, or they fly over a lake to detect floating garbage. In other words, three objects may be sufficient in our scenario without considering the drone’s height.
When \(M=3\), (37) and (45) can be written out as
where \(d_{n,m}\) is calculated by (15).
Experimental results
In this section, we present the MOHT-HMM based spectrum prediction experiments. Similar to the experiment in34, RTL-SDR receivers measured civil aviation signals in the frequency band 124841100 Hz with 8K Hz bandwidth, as shown in Figure 11. The real measured data is the spectrum sensing sequence \({{\bf O}}\), indicating whether civil aviation aircraft communicates with the airport tower.

Measure the civil aviation signals by RTL-SDR receivers.

Map of the 3 known and 14 unknown locations. Among them, \(L_1^{\text {kn}}\) is the Chengdu Shuangliu International Airport (Chengdu, Sichuan, China).
For \(M=3\), three Known Locations were selected as Chengdu Shuangliu International Airport (\(L_1^{\text {kn}}\)), Phoenix Mountain (\(L_2^{\text {kn}}\)) and Liulin Campus, Southwest University of Finance and Economics (\(L_3^{\text {kn}}\)). The distances between the three Known Locations are \(D_{12}=25.01\) km, \(D_{13}=20.19\) km, and \(D_{23}=27.93\) km. In the area composed of the three Known Locations, there are 14 internal locations as the unknown locations \(L_1^{\text {ukn}} \sim L_{14}^{\text {ukn}}\). The map of the location distribution is shown in Fig. 12. Compared to the locations listed in Table 1 with \(M=2\), the UAV can randomly fly in the area, resulting in the need to predict the spectrum for arbitrary locations.
In the following experiments, the spectrum states at the locations \(L_1^{\text {ukn}} \sim L_{14}^{\text {ukn}}\) are predicted by our proposed method according to the data of only three Known Locations \(L_1^{\text {kn}} \sim L_{3}^{\text {kn}}\). As a comparison, the classic HMM method predicts the spectrum at \(L_1^{\text {ukn}} \sim L_{14}^{\text {ukn}}\) by using the real measurement data at these 14 locations. We set the initial values for HMM parameters as: \(a_{00}=0.6\), \(a_{01}=0.4\), \(a_{10}=0.5\), \(a_{11}=0.5\), \(b_{00}=0.7\), \(b_{01}=0.3\), \(b_{10}=0.6\), \(b_{11}= 0.4\), \(\pi _0=0.8\), \(\pi _1=0.2\). The training length of \({{\bf O}}\) is 300 spectrum state samples. The total measured sample length of \({{\bf O}}\) is 1200 at each location. The signal occupancy parameters in \({{\bf O}} _1^{\text {kn}} \sim {{\bf O}} _3^{\text {kn}}\) are \(\lambda _1^{\text {kn}} =0.1842\), \(\lambda _2^{\text {kn}} =0.0400\), \(\lambda _3^{\text {kn}} =0.0317\), by calculating the frequency of 1 in \({{\bf O}}\). There were 5000 times Monte-Carlo trails tested for each location prediction.
Table 2 presents the homotopy based estimation performance of matrix \({{\bf A}}\) and Poisson parameter \(\lambda\) by comparing the average relative errors expressed as
where the measured \({{\bf A}}_n ^{\text {ukn}}\) and \(\lambda _n^{\text {ukn}}\) are both obtained from the real measured \({{\bf O}}_n ^{\text {ukn}}\). Only \(a_{00}\) and \(a_{10}\) are listed here since the matrix \({{\bf A}}\) follows
Table 2 shows the errors \(\le 3.83 \%\) for all locations, implying the homotopy based estimation is effective.

The difference in prediction probability between the classic HMM and MOHT-HMM based approaches, i.e., the two rows of values in Table 3 are subtracted.

The CDF values of the classic HMM, 2DHMM, LSTM and MOHT-HMM based approaches.
The prediction performance is presented in Table 3, including the classic HMM and our MOHT-HMM based approaches. It is observed that the prediction probability of the MOHT-HMM is between 82.49% and 93.90%, a little smaller than that of the HMM from 84.05% to 94.60%. This indicates the MOHT-HMM based method can effectively predict the spectrum state. The differences in prediction probabilities between the two approaches \(\le\) 3.28%, illustrated in Figure 13. We can see that the differences in the middle area of the figure are larger than those in other areas. This is because the farther away from the Known Locations, the less accurate the estimation of \({{\bf A}}\) and \(\lambda\) , resulting in poorer prediction performance.
Similar to the case of \(M=2\) in Fig. 10, although our method performs worse than the HMM, the HMM requires the measured data at unknown locations, which is difficult to obtain in real applications. The MOHT-HMM does not require the measured \({{\bf O}}_n ^{\text {ukn}}\), only the historical information at a small amount of Known Locations. In other words, our method can effectively work in the UAV scenario with no historical data of the next location, performing only a little worse than the HMM using this historical data.
Figure 14 is the cumulative distribution function (CDF) value of the MOHT-HMM based prediction, calculated with 95% confidence intervals. It presents the rate at which the locations in the triangle region have a prediction probability greater than a preset reference value. For example, in Fig. 14, the rate at the prediction probability exceeding 0.9 (horizontal ordinate) is 0.47 (CDF value) for the unknown locations using the MOHT-HMM. The CDF value can suggest a prediction probability reference value that most locations can meet. Furthermore, a higher CDF value indicates better prediction performance. To make a comparison, three methods based on the classic HMM, two-dimensional (2D) HMM54,55,56, and the LSTM26,27 were simulated by using the measured data. It can be seen from Fig. 14 that the prediction accuracy of MOHT-HMM is lower than that of both the classic HMM and the 2DHMM. Meanwhile, when the prediction probability is less than 0.9, the CDF of our method is also worse than that of LSTM. However, all the three comparison methods require the historical data of each unknown location. At the same time, our method only needs the historical information of three Known Locations to predict the spectrum state of any unknown location within the triangle region.
Bayesian based prediction probability
Table 3 shows that the prediction performance varies in different locations for both methods. The reason is that the spectrum utilization is changing, not that the method itself is not robust. Specifically, when the 0-state accounts for the majority (in our experiments, all \(\lambda ^{(1)} <0.2\)), if the spectrum occupation decreases, the following spectrum state would tend to be predicted as a 0-state since the number of 0-states increases. This leads to a better prediction performance of 0-state. In other words, the values in Table 3 may not illustrate the true performance of the method. We need to discuss the inherent performance not affected by the spectrum utilization. In the following content, a Bayesian based prediction probability is introduced to characterize the performance.
By assuming
we can define \(P(h_0|H_0 )\) as the probability of \(h_0\) under the hypothesis of \(H_0\), representing the prediction accuracy. This probability can tell the inherent prediction performance since it does not consider the probability of 0-state. We have
and then the Bayesian formula
can be written as
All the probabilities at the right of the above equation can be calculated by the prediction results and measured data.
The Bayesian based predicted probability for each location is shown in Fig. 15. The prediction probability of the MOHT-HMM is between 0.9306 and 0.9850, and that of the other three methods is between 0.9227 and 0.9966. All the methods are stable as the Bayesian based probability curves fluctuate little (the standard deviation does not exceed 2.2%).

The Bayesian based prediction probability of classic HMM, 2DHMM, LSTM and MOHT-HMM based approaches.
Conclusions and future works
A new spectrum prediction method is presented in this paper, called the MOHT-HMM based prediction, suitable for UAVs flying in arbitrary paths in a region. Traditional methods require historical data in advance, which is difficult to achieve. The proposed method extends the HT and builds a homotopy mapping of multiple objects to estimate the historical data of unknown locations so that the spectrum states at arbitrary locations in the region can be predicted. Experimental results indicate that the proposed method works well by using real civil aviation signals. The MOHT-HMM mainly has merit in scenarios without sufficient prior information, by using a simple homotopy based estimation.
However, the scenario of arbitrary flight trajectory is rather simplistic and cannot be applied to real-world scenarios yet. To provide spectrum prediction solutions for real and complex UAV missions, our future work may consider issues such as UAV flight path control and the selection of homotopy object locations.
Data availability
The datasets used and/or analysed during the current study are available from the corresponding author on reasonable request.
References
Liebhart, R., Shafi, M., Tataria, H., Shivanandan, G. & Chandramouli, D. Perspectives on 6G architectures. IEEE Wirel. Commun. 32, 108–114 (2025).
Shin, H. et al. The future service scenarios of 6G telecommunications technology. Telecommun. Policy 48, 102678 (2024).
Uusitalo, M. A., Rugeland, P., Boldi, M. R. et al. 6G vision, value, use cases and technologies from European 6G Flagship Project Hexa-X. IEEE Access 9, 160004–160020 (2021).
Al-Matari, N. Y., Zahary, A. T. & A. Al-Shargabi, A. A survey on advancements in blockchain-enabled spectrum access security for 6G cognitive radio IoT networks. Sci. Rep. 14, 1–24 (2024).
Ernest, T. Z. H., Madhukumar, A. S., Sirigina, R. P. & Krishna, A. K. Addressing spectrum efficiency through hybrid-duplex UAV communications: Challenges and opportunities. Veh. Commun. 24, 100235 (2020).
Ghamari, M., Rangel, P., Mehrubeoglu, M., Tewolde, G. S. & Sherratt, R. S. Unmanned aerial vehicle communications for civil applications: A review. IEEE Access 10, 102492–102531 (2022).
Ministry of Industry and Information Technology of the People’s Republic of China. Radio Frequency Allocations of the People’s Republic of China (Order No. 62 of the Ministry of Industry and Information Technology of the People’s Republic of China). https://wap.miit.gov.cn/cms_files/filemanager/1226211233/attach/20236/9086700eed45430bafe236efd1096fd3.pdf. Accessed 1 July 2023 (2023).
Luo, S. et al. Opportunistic spectrum access for UAV communications towards ultra dense networks. IEEE Access 7, 175021–175032 (2019).
Shang, B., Marojevic, V., Yi, Y., Abdalla, A. S. & Liu, L. Spectrum sharing for UAV communications: Spatial spectrum sensing and open issues. IEEE Veh. Technol. Mag. 15, 104–112 (2020).
Paul, A. & Choi, K. Deep learning-based selective spectrum sensing and allocation in cognitive vehicular radio networks. Veh. Commun. 41, 100606 (2023).
Shen, F., Ding, G., Wang, Z. & Wu, Q. UAV-based 3D spectrum sensing in spectrum-heterogeneous networks. IEEE Trans. Veh. Technol. 68, 5711–5722 (2019).
Zhang, M., Zhu, X., Zhang, B., Wang, S. & Sun, H. A cross-layer performance evaluation system for spectrum sensing and allocation strategies in CR-WSN. IEEE Sens. J. 24, 15355–15366 (2024).
Wei, Z., Yao, R., Kang, J., Chen, X. & Wu, H. Three-dimensional spectrum occupancy measurement using UAV: Performance analysis and algorithm design. IEEE Sens. J. 22, 9146–9157 (2022).
Liang, X. et al. Throughput optimization for cognitive UAV networks: A three-dimensional-location-aware approach. IEEE Wirel. Commun. Lett. 9, 948–952 (2020).
Xing, X., Jing, T., Cheng, W., Huo, Y. & Cheng, X. Spectrum prediction in cognitive radio networks. IEEE Wirel. Commun. 20, 90–96 (2013).
Zhao, Y., Hong, Z., Luo, Y., Wang, G. & Pu, L. Prediction-based spectrum management in cognitive radio networks. IEEE Syst. J. 12, 3303–3314 (2018).
Nguyen, V.-D. & Shin, O.-S. Cooperative prediction and sensing based spectrum sharing in cognitive radio networks. IEEE Trans. Cognit. Commun. Netw. 4, 108–120 (2018).
Ding, G. et al. Spectrum inference in cognitive radio networks: Algorithms and applications. IEEE Commun. Surv. Tutor. 20, 150–182 (2018).
Chen, Y. & Oh, H. A survey of measurement-based spectrum occupancy modeling for cognitive radios. IEEE Commun. Surv. Tutor. 18, 848–859 (firstquarter, 2016).
Qiao, G., Song, Q., Ma, L., Sun, Z. & Zhang, J. Channel prediction based temporal multiple sparse Bayesian learning for channel estimation in fast time-varying underwater acoustic OFDM communications. Signal Process. 175, 107668 (2020).
Lin, F., Chen, J., Sun, J., Ding, G. & Yu, L. Cross-band spectrum prediction based on deep transfer learning. China Commun. 17, 66–80 (2020).
Arunthavanathan, S., Kandeepan, S. & Evans, R. J. A Markov decision process-based opportunistic spectral access. IEEE Wirel. Commun. Lett. 5, 544–547 (2016).
Eltom, H., Kandeepan, S., Liang, Y. & Evans, R. J. Cooperative soft fusion for HMM-based spectrum occupancy prediction. IEEE Commun. Lett. 22, 2144–2147 (2018).
Melián-Gutiérrez, L. et al. HF spectrum activity prediction model based on HMM for cognitive radio applications. Phys. Commun. 9, 199–211 (2013).
Jin, Z., Yao, K., Lee, B., Cho, J. & Zhang, L. Channel status learning for cooperative spectrum sensing in energy-restricted cognitive radio networks. IEEE Access 7, 64946–64954 (2019).
Janu, D., Singh, K., Kumar, S. & Mandia, S. Hierarchical cooperative LSTM-based spectrum sensing. IEEE Commun. Lett. 27, 866–870 (2023).
Radhakrishnan, N. & Kandeepan, S. An improved initialization method for fast learning in long short-term memory based Markovian spectrum prediction. IEEE Trans. Cognit. Commun. Netw. 7, 729–738 (2021).
Khuwaja, A. A., Chen, Y., Zhao, N., Alouini, M. & Dobbins, P. A survey of channel modeling for UAV communications. IEEE Commun. Surv. Tutor. 20, 2804–2821 (2018).
Zhu, Q., Jiang, K., Chen, X., Zhong, W. & Yang, Y. A novel 3D non-stationary UAV-MIMO channel model and its statistical properties. China Commun. 15, 147–158 (2018).
Jiang, H. et al. A novel 3D UAV channel model for A2G communication environments using AoD and AoA estimation algorithms. IEEE Trans. Commun. 68, 7232–7246 (2020).
Liao, S. Notes on the homotopy analysis method: Some definitions and theorems. Commun. Nonlinear Sci. Numer. Simul. 14, 983–997 (2009).
Pan, B., Ma, Y. & Ni, Y. A new fractional homotopy method for solving nonlinear optimal control problems. Acta Astronaut. 161, 12–23 (2019).
O’Regan, D. Topological fixed point theory for compact multifunctions via homotopy and essential maps. Topol. Appl. 265 (2019).
Luo, S., Zhao, Y., Xiao, Y., Lin, R. & Yan, Y. A temporal-spatial spectrum prediction using the concept of homotopy theory for UAV communications. IEEE Trans. Veh. Technol. 70, 3314–3324 (2021).
Luo, S., Zhou, T., Xiao, Y., Lin, R. & Yan, Y. Predicting spectrum status duration using non-linear homotopy estimation based HMM for UAV communications. Signal Process. 212, 109131 (2023).
Shaghluf, N. & Gulliver, T. A. Spectrum and energy efficiency of cooperative spectrum prediction in cognitive radio networks. Wirel. Netw. 25, 3265–3274 (2019).
Lv, Q., Qiao, Y., Ansari, N., Liu, J. & Yang, J. Big data driven hidden Markov model based individual mobility prediction at points of interest. IEEE Trans. Veh. Technol. 66, 5204–5216 (2017).
Chen, X., Zhang, H., MacKenzie, A. B. & Matinmikko, M. Predicting spectrum occupancies using a non-stationary hidden Markov model. IEEE Wirel. Commun. Lett. 3, 333–336 (2014).
Wang, J. W. & Adriman, R. Analysis of opportunistic spectrum access in cognitive radio networks using hidden Markov model with state prediction. EURASIP J. Wirel. Commun. Netw. 10 (2015).
Yu, Q. A hierarchical wavelet method for nonlinear bending of materially and geometrically anisotropic thin plate. Commun. Nonlinear Sci. Numer. Simul. 92, 105498 (2021).
Chiang, H.-D. & Wang, T. Novel homotopy theory for nonlinear networks and systems and its applications to electrical grids. IEEE Trans. Control Netw. Syst. 5, 1051–1060 (2018).
Zhang, W., Tan, C. & Dong, F. Non-linear reconstruction for ERT inverse problem based on homotopy algorithm. IEEE Sens. J. 23, 10404–10412 (2023).
Avigad, J., Kapulkin, K. & Lumsdaine, P. L. Homotopy limits in type theory. Math. Struct. Comput. Sci. 25, 1040–1070 (2015).
Liao, S. Comparison between the homotopy analysis method and homotopy perturbation method. Appl. Math. Comput. 169, 1186–1194 (2005).
Rezk, C. A model for the homotopy theory of homotopy theory. Trans. Am. Math. Soc. 353, 973–1007 (2001).
Bergner, J. E. Three models for the homotopy theory of homotopy theories. Topology 46, 397–436 (2007).
Szumilo, K. Homotopy theory of cofibration categories. Homol. Homotopy Appl. 18, 345–357 (2016).
He, J.-H. Comparison of homotopy perturbation method and homotopy analysis method. Appl. Math. Comput. 156, 527–539 (2004).
Liao, S. On the homotopy analysis method for nonlinear problems. Appl. Math. Comput. 147, 499–513 (2004).
Anselin, L. & Li, X. Tobler’s law in a multivariate world. Geogr. Anal. 52, 494–510 (2020).
Zhao, F.-H., Huang, J. & Zhu, A.-X. Spatial prediction of groundwater level change based on the third law of geography. Int. J. Geogr. Inf. Sci. 37, 2129–2149 (2023).
Akbar, I. A. & Tranter, W. H. Dynamic spectrum allocation in cognitive radio using hidden Markov models: Poisson distributed case. In Proceedings IEEE SoutheastCon. 196–201 (2007).
Huang, P., Liu, C., Yang, X., Xiao, L. & Chen, J. Wireless spectrum occupancy prediction based on partial periodic pattern mining. IEEE Trans. Parallel Distrib. Syst. 25, 1925–1934 (2014).
Li, J., Najmi, A. & Gray, R. M. Image classification by a two-dimensional hidden Markov model. IEEE Trans. Signal Process. 48, 517–533 (2000).
Li, Y. An analytic solution for estimating two-dimensional hidden Markov models. Appl. Math. Comput. 185, 810–822 (2007).
Zhang, Q., Luo, S., Liu, H. & Lin, R. A spectrum prediction method based on two-dimensional hidden Markov model for UAV communications. In 2022 19th International Computer Conference on Wavelet Active Media Technology and Information Processing (ICCWAMTIP). 1–5 (2022).
Acknowledgements
This work was supported by the National Natural Science Foundation of China (NSFC) [grant numbers 12072068]; and the Sichuan Science and Technology Program [grant number 2024ZDZX0047]; and the Jiangxi Provincial Natural Science Foundation [grant number 20242BAB25071]; and the Major Key Project of Peng Cheng Laboratory [grant number PCL2023AS1-2].
Author information
Authors and Affiliations
Corresponding authors
Ethics declarations
Competing interests
The authors declare no competing interests.
Additional information
Publisher’s note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
Open Access This article is licensed under a Creative Commons Attribution-NonCommercial-NoDerivatives 4.0 International License, which permits any non-commercial use, sharing, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons licence, and indicate if you modified the licensed material. You do not have permission under this licence to share adapted material derived from this article or parts of it. The images or other third party material in this article are included in the article’s Creative Commons licence, unless indicated otherwise in a credit line to the material. If material is not included in the article’s Creative Commons licence and your intended use is not permitted by statutory regulation or exceeds the permitted use, you will need to obtain permission directly from the copyright holder. To view a copy of this licence, visit http://creativecommons.org/licenses/by-nc-nd/4.0/.
About this article

Cite this article
Luo, S., Zhou, W., Wu, L. et al. A homotopy estimation based temporal-spatial spectrum prediction for UAV communications with arbitrary flight paths. Sci Rep 15, 25094 (2025). https://doi.org/10.1038/s41598-025-10691-x
Received:
Accepted:
Published:
Version of record:
DOI: https://doi.org/10.1038/s41598-025-10691-x
