
Abstract
An array of micro-ramp vortex generators (MRVGs) is deployed on the bottom of the ship’s hull just before the inlet, aiming to mitigate flow separation on the ramp wall at low inlet velocity ratios (IVR). Four parameters, including height, wedge angle, side length, and spanwise spacing, were analyzed using the numerical methods. Through parametric screening, the optimal height ranges from 20 to 40% of the hull boundary layer thickness upstream of the inlet, while wedge angle and length have negligible effects. MRVGs have been shown to improve outflow uniformity and total pressure recovery, particularly under IVR < 0.7 conditions. At the representative condition (IVR = 0.5), the inlet with optimized MRVGs achieved reductions of 41.5% in nonuniformity, 74.0% in swirl, and 61.6% in total pressure distortion, while increasing total pressure recovery by 8.4% compared with the original design. MRVGs improved the thrust of the waterjet propulsion system by 2.86% and enhanced the propulsion efficiency by 1.60%. Furthermore, the amplitude of the axial frequency (fn) pressure pulsation on the inlet pressure side of the impeller was reduced by 40.86%, and the amplitude of excitation force on the impeller at fn was significantly reduced by 60%. This work demonstrates the valuable application of the MRVGs device in improving the overall performance and the potential application in vibration and noise reduction of flush waterjet propulsion at high cruise speeds via simple passive flow control techniques.
Similar content being viewed by others


Introduction
Waterjet propulsion is known for its unique features, including high propulsive efficiency, low noise radiation, excellent maneuverability, and anti-cavitation capacity, making it a preferred choice for high-speed vessels and shallow draft ships. It is normally installed at the ship stern, sucking in water from the ship’s bottom hull, ejecting it through a flush tailpipe. The system features an elbow-shaped intake duct to transfer water into the propulsion pump. Park et al.1 reported approximately 10% energy loss due to the inlet flow through the intake duct. The matching of the intake duct and waterjet pump is a critical factor in designing high-efficiency waterjet propulsion systems.
Extensive research has been conducted to investigate the loss mechanisms of inlet flow in waterjet propulsion systems. Bulten2 identified four factors that contribute to the distorted inflow of the waterjet pump, including the hull boundary layer, the ramp flow separation, the pump rotor shaft, and the secondary flow in the bend pipe. Roberts3 observed a flow separation zone at the intake roof, where a thickened inlet boundary layer exacerbated the flow separation and negatively impacted inlet performance. Hu and Zhang4 showed that the rotating shaft induces twin eddies above the shaft, leading to swirling incoming flow into the pump. Similarly, Jung et al.5 reported a couple of counter-rotating vortices in the average velocity distribution at the nozzle exit. These findings highlight the complex nature of inlet flow phenomena and their impact on the performance of waterjet propulsion systems.
Furthermore, the performance of waterjet propulsion systems tends to deteriorate at high ship cruise speeds or low inlet velocity ratios (IVR), as flow separation in the duct aggravates upstream of the pump entrance. Cao et al.6 demonstrated a significant decrease in pump head and efficiency due to nonuniform and swirling inlet flow. Duerr et al.7 found that the nonuniform axial velocity at the pump face results in pulsating loading of the rotor blades, leading to increased noise, vibrations, and a high risk of cavitation. Therefore, reducing inlet flow distortion is crucial for improving the efficiency of waterjet propulsion systems.
Numerous researchers have attempted to optimize intake duct geometry to reduce energy losses. Huang et al.8 conducted a parametric screening within the range of IVR = 0.3–0.8 to optimize the geometry of a flush-type inlet, while Zhang et al.9 optimized the inclination angle and radius of a specific duct, achieving performance improvements. However, due to geometric constraints of bent pipe, duct shape optimization alone is insufficient to address potential boundary layer separation caused by inherent adverse pressure gradients along the ramp wall.
The flow characteristics in an S-shaped aero-engine inlet are similar to those in a waterjet inlet, exhibiting flow separation and streamwise vortices. Ng et al.10 successfully suppressed flow separation using arrays of vortex generators (VGs). Taylor11 also reported the effective usage of various VGs to control the separation on fixed wings, helicopter fuselages, and rotor blades. Wojewodka et al.12 extensively reviewed applications of flow control methods in S-shaped ducts. Brandner and Walker13,14 applied a delta-shaped VG sheet to the intake duct ceiling, inducing streamwise vortices that mitigated downstream separation caused by low-speed boundary layer ingestion. However, this approach increased cavitation risk at the VG tip due to their large size. Huang et al.15 installed six trapezoidal VG blades on the bottom of the ship, successfully suppressing flow separation within the inlet duct, and improving outflow uniformity. Zhai et al.16 developed a triangular VG to suppress vibration caused by propeller cavitation. Saydam et al.17 studied the effects of VGs on the speed and comfort of boats. Sun et al.18 proposed a novel VG to enhance hydrofoil performance and evaluated its potential for reducing flow noise. Kadivar et al.19 experimentally investigated the wedge-type VG on a benchmark hydrofoil and found that it effectively prevented the formation of cloud cavitation. However, VG elements are susceptible to damage from debris and tangled grass in water, as the VG blades are a thin sheet extruded from the ship’s hull. Lin20 proposed a micro-ramp vortex generator (MRVG) with specially shaped VG elements and smaller heights than the local boundary layer thickness. Due to their low flow resistance and physical robustness, MRVGs have found application in aircraft for controlling the interaction between shock waves and boundary layers.
This study was inspired by the existing achievements of MRVGs to evaluate the feasibility of controlling the flow separation of waterjet propulsion intakes, accounting for the vulnerability of VG thin structures to debris entanglement in the working environment and structural strength challenges during installation. Geometric parameters of MRVGs configuration were investigated through a design of experiment process to determine the optimal effectiveness and adaptability under representative operating conditions. At high-speed cruising condition (IVR = 0.5), compared with the traditional VG, MRVGs have significantly improved the performance of the waterjet intake pipe. In particular, MRVGs address the limitation of VG in terms of swirl degree. Additionally, the influence of MRVGs on impeller pressure pulsations and excitation forces is analyzed, providing a novel flow control technology and a theoretical foundation for vibration and noise control in waterjet propulsion systems.
Waterjet inlet and MRVGs models
Waterjet model
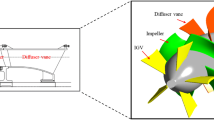
The waterjet model employed here is a downscaled in-service waterjet propulsor, with a pump rotor. The model consists of two parts: the inlet duct and the pump system. The inlet duct includes an inlet section, an auxiliary water tank representing the external flow region, and a straight pipe for fully developed exit flow conditions. The inlet duct consists of a rectangular front section and a semi-elliptical rear section with a 25° ramp angle relative to the incoming flow. The duct shape resembles a lobster back bend, followed by a short straight duct connecting to the pump. This geometry is comparable to that used in Brandner and Walker’s study21, except for shape dimensions. This geometry is considered a typical design for a conventional flush waterjet inlet. The pump system includes the impeller (rotor), guide vanes (diffuser), and discharge nozzle. The pump geometry has been designed for purely axial inlet flow at the impeller inlet section. The impeller has a diameter D of 180 mm, five blades, and a tip clearance of 1 mm. The guide vane diffuser is enclosed in a 180 mm diameter casing with nine guide vanes. The rotating speed is 1450 r/min. The hub diameter tapers to zero in the nozzle, and the discharge diameter of the nozzle is 100 mm. The diameter of the shaft that penetrates the inlet pipe is 30 mm. Details of the waterjet model and MRVGs arrangement are illustrated in Fig. 1. According to the previous work15, the water tank extends 4D upstream of the inlet section, with dimensions of 6D in width and 4D in height.

Waterjet model calculation domain, created using UG NX 12.0, https://plm.sw.siemens.com/
MRVG model
The most attractive advantages of MRVGs compared to conventional VGs are their physical robustness and resistance to mechanical failure in sediment-laden shallow water, critical for waterjet applications. The geometry of the MRVGs used in this study is shown in Fig. 2. It is characterized by height H, wedge half-angle A, and side length L. For paired MRVGs, an additional parameter is streamwise spacing S. Lin20 suggested that element height H should be 0.2–0.4 times the local boundary layer thickness. The primary MRVGs shape and device arrangement are derived from previous studies. Anderson et al.22 proposed an optimized shape for a high-speed airflow with A = 24° and L/H = 7.2. The optimal dimensions of the MRVGs elements will be investigated through a design of experiment procedure under the given waterjet inlet flow conditions. Regarding MRVG element arrangement, although numerous configurations are possible, this study places two MRVG elements 1D upstream of the inlet entrance, as shown in Fig. 2. This arrangement is based on Huang et al.’s15 installation of vane-shaped vortex generators at the same inlet distance, which effectively suppressed flow separation at low IVR. Two MRVGs elements are symmetrical about the duct midplane and are spaced at a distance of S = 5.5H, following Wang et al.’s23 guidelines.

Schematic MRVGs.
Numerical Simulation Methods
CFD setup
The numerical calculations in this paper are performed using CFX19.2 and the working medium is water at 15 °C. The Shear-Stress Transport (SST) k-ω turbulence model with wall functions is employed due to its robustness in predicting limited flow separation with acceptable accuracy. The solver utilizes the SIMPLEC algorithm for the pressure–velocity coupling iteration, and the central difference scheme for the pressure term. A second-order upwind scheme is used to discretize the momentum, turbulent kinetic energy, and specific dissipation rate equations. The convergence criterion is set to 1 × 10–6.
Following Huang et al.’s15 approach, a computational domain smaller than those in other studies8,24 is adopted, as a fully developed turbulent velocity profile is imposed at the inflow plane instead of a long tank. As illustrated in Fig. 3, the flow direction is aligned with the negative X-axis.

Inflow and pump face plane of intake duct, created using UG NX 12.0, https://plm.sw.siemens.com/
The specified velocity profile is defined in Eq. (1),
The boundary layer thickness in Eq. (2) is employed for the thickness of the hull boundary layer \(\delta\) in Eq. (1), which has been done in previous studies such as Cao et al.6, Huang et al.8, and Huang et al.15. The Reynolds number Re is defined based on the free ship speed \({u}_{0}\) and the streamwise distance x from the ship bow to the inlet entrance. Huang et al.15 have demonstrated that x = 30D is sufficient to evaluate the effects of VGs.
The outflow surface of the computational domain and the outlet of the waterjet propeller are assigned ambient atmospheric pressure. The impeller, guide vanes, drive shaft, duct wall, MRVGs wall, and upper hull wall are set as no-slip walls. The two sides of the hull are defined as periodic boundaries, and the lower hull wall is set as a free-slip wall. A constant flow approach is used to calculate propeller hydraulic performance and analyze the inlet runner flow field. The Multiple Reference Frame (MRF) method is employed for the rotational domain, and a frozen rotor connection is selected for the dynamic-static interface. Pressure pulsations in the propulsion pump are calculated using unsteady flow simulations, with the stationary solution serving as the initial field. The dynamic-static interface uses the transient rotor–stator condition with a two-layer time step advancement: each impeller rotation by 2.4° constitutes one physical time step, and each time step undergoes 20 iterations. After six rotational cycles, the pressure at the monitoring point stabilizes into cyclic pulsations, followed by one additional cycle for flow analysis.
Mesh independence
In this study, hybrid grids are generated using ANSYS ICEM software. Unstructured grids are generated near MRVGs and structured grids are generated in other components, as shown in Fig. 4. The inlet duct employs an O-grid topology with butterfly meshing. Prism grids are used to mesh the inlet sharp corner in order to avoid singular elements. All boundary layer mesh refinement is employed in the near-wall region. The height of the first element layer on the no-slip wall is finally set as 1.0 × 10−5 m after several attempts to ensure the maximum wall-normal distance y+ < 1, which meets the requirement for the turbulence near-wall treatment. Meshes for the propulsion pump’s impeller and guide vanes are generated using ANSYS TurboGrid software, with local refinement applied in regions such as the tip gap and blade root. The height of the first normal mesh layer on all solid walls is set to 0.01 mm, achieving a y+ < 30, which satisfies the requirement for using wall functions to simulate near-wall turbulence.

Schematic view of mesh for computation, created using ANSYS 2022R1, https://www.ansys.com/
Grid independence was verified by monitoring four key parameters: velocity uniformity coefficient \(\xi\) and the total pressure recovery coefficient η at the interface between the inlet runner and the impeller, pump flow rate and pump head. As shown in Fig. 5, when the inlet runner grid exceeds 6.5 million, and the waterjet propulsion pump grid reaches 7 million, the four flow parameters reach grid independence, so the final total number of grids calculated in this paper is 13.5 million.

Validation of grid-independence.
Validation of CFD prediction
Computational accuracy is validated against a similar inlet experiment by Brandner and Walker21, which included a dummy pump shaft in the duct. Two representative test cases at IVR = 0.5 and 1.0 are selected to validate CFD settings, including domain meshing and turbulence model. As the key issue is the potential suppression of ramp flow separation, which is linked to local streamwise pressure gradients, pressure distributions from CFD predictions and experimental measurements are compared along the ramp slope centerline in Fig. 6, from the inlet toe to the notional pump face.

Pressure distributions along the ramp centerline by CFD and experiment measurement.
Upstream of the shaft, the computational results predict the pressure distribution reasonably well. Downstream of the shaft, some discrepancies emerge between the two cases. For IVR = 0.5, ramp pressure rises rapidly upstream of the shaft and exhibits a pressure inflection downstream, indicating flow separation. The results predicted by CFD show higher pressure than experimental measurements up to the pump face. However, for IVR = 1.0, discrepancies arise immediately downstream of the shaft, corresponding to the near-wake region. These discrepancies are attributed to limitations of the SST k-ω model in separated flow regions. Nonetheless, computational results show the same monotonic trend and validate the reliability of simulations in predicting flow behavior influenced by MRVG installation. Figure 7 compares the experimental the pump head coefficient KH and pump efficiency ηp under different flow coefficients KQ25, with discrepancies less than 3%. This confirms the reliability of the numerical method.

Comparison of experimental and numerical results for propulsion pump.
Results and discussion
The objective of this study is to replace the vane-shaped VGs with a low-profile MRVG that offers reduced flow resistance and improves mechanical reliability. The study is conducted in three steps. First, a baseline MRVG configuration is tested to evaluate its flow control effectiveness. Second, a set of MRVG configurations is generated via a design-of-experiments (DOE) procedure to identify the optimal configuration. Finally, the selected MRVG configuration is assessed for reliability across a broad operating range.
Flow control with MRVG
The hull boundary layer thickness δ is measured as 46 mm at x/D = 5.81, which is 1D upstream of the inlet entrance, based on the inlet boundary conditions prescribed by Eqs. (1) and (2). Therefore, the height of the MRVG is about 30% of δ, i.e., H = 15 mm. The length of the MRVG is downscaled from Anderson’s optimized shape22 and is determined to be L = 72 mm with a half-angle A = 24°. Current industry practice for evaluating waterjet inlet duct performance employs two parameters: the nonuniformity coefficient \(\xi\) and the total pressure recovery coefficient η. These parameters reflect the uniformity of outlet flow at the pump face (PF) plane. Additionally, parameters including swirl degree \(\theta\) and total pressure distortion coefficient DC60 are considered to evaluate inflow distortion upstream of the pump. An effectively designed inlet should exhibit high η (indicating high energy retention) and low \(\xi\), \(\theta\) and DC60 (indicating reduced distortion and uniform flow). The performance parameters of the inlet model with and without MRVG flow control are compared in Table 1, under a typical low operating condition of IVR = 0.5.
Table 1 presents the performance of waterjet inlet ducts for the two cases of MRVG flow control and original inlet distortion condition (ORG). The first case uses a single MRVG on the inlet centerline, and the second uses paired MRVGs as shown in Fig. 1. Both cases demonstrate improvements in outflow uniformity. In the case with a single MRVG element, nonuniformity coefficient \(\xi\) is reduced by 14.6%; the swirl degree θ by 47.1%; and the distortion DC60 by 23.3%. The case with two MRVG elements shows further reduction in \(\xi\), θ and DC60, nearly doubling the reductions. However, the single MRVG only slightly increases η by 4.8%, and the double MRVG case by 7.2%. This indicates that while MRVGs positively impact flow uniformity, they have a negative effect on energy recovery due to their inherent flow resistance. It also suggests the possibility of optimizing MRVG configuration to strike a balance between VG benefits and penalties.
Parametric optimization of MRVG
Generally, the effectiveness of MRVG configurations depends on multiple factors, including the shape, location, and array spacing of MRVG elements. In this study, following a previous work by Huang15, the problem is simplified to optimizing four geometric parameters: the height, side length, wedge angle of MRVG elements, and the spacing between two elements. Based on the effective case with two MRVG elements as mentioned above, the design variables are defined with upper and lower bounds, as listed in Table 2. To reduce sampling costs while ensuring reasonable coverage of the design space, 11 samples are selected using the Latin Hypercube Design (LHD) of the Design of Experiments (DOE) method and numerically analyzed to obtain the four performance parameters ξ, θ, DC60 and η, as listed in Table 3. Based on the sample matrix, an inlet performance predictor concerning MRVG shape and arrangement is built by the Kriging surrogate model (KSM)26. The NSGA-II algorithm is then employed to solve the optimization problem to achieve the minimize ξ, θ, DC60, and maximize η in the design space27. Since all four performance parameters need to be considered together, a weighted objective function defined in Eq. (3) is used to evaluate the effectiveness of an MRVG configuration, rather than a multi-objective formulation.
where \({w}_{i}(i=\text{1,4})\) are weights of each performance index and can be set as the designer wishes. In this study, a weighted objective function \(w=(\text{0.3,0.1,0.3,0.3})\) is used, since the focus is on outflow uniformity and pressure recovery. For the NSGA-II solver, the parameters are set as follows: population size of 12, 20 generations, crossover probability of 0.9, crossover distribution index of 10, and mutation distribution index of 20. The surrogate modeling and NAGA solver are implemented using Isight software.
The final optimal MRVG configuration is obtained with the following variables: H = 16 mm, A = 24°, L = 82 mm, S = 95 mm. This optimal configuration is labeled as OPVG in Table 4, and it is comparable to the primary configuration of double MRVG elements.
Table 4 presents the inlet performance with the optimized MRVG configuration, which is predicted by both CFD simulations and the KSM predictor. While the swirl degree θ shows a relatively large error in the KSM predictions, the other three parameters of ξ, DC60, and η are in satisfactory agreement with the CFD results. Since the swirl degree θ is a minor contributor to the objective function, the optimal solution is deemed acceptable based on CFD analysis. Furthermore, significant performance improvements are observed after the optimization of the MRVG configuration, particularly in terms of inflow distortion DC60, which shows a significant reduction.
Figure 8 shows the development of streamwise vortices, depicted by the vorticity contours at three locations (X/D = 5.81, 5.31, 4.81). It can be observed that the fluid forms two counter-rotating vortex pairs after passing through both MRVGs. As the downstream development progresses, the vortex core rises but remains within the boundary layer. It gradually dissipates as it reaches the entrance of the intake duct (X/D = 4.81). This indicates that the OPVG can facilitate the energy exchange of the boundary layer in a short range, without causing a significant increase in the swirl distortion in the pump face plane.

Vorticity distributions along streamwise locations (IVR = 0.5).
Figure 9 depicts the streamlines and velocity magnitude in the duct midplane. It is observed that the MRVG device alters the inflow direction at the duct entrance, generating strong streamwise vortices that mix the hull boundary layer fluid with the mainstream of high momentum. In the original duct configuration, flow separation at the ramp side causes a low flow velocity zone. However, with the MRVG installed, flow separation is eliminated, indicating the MRVG’s capability to maintain diffusive flow deceleration while elevating velocity at the pipe’s top through flow separation suppression.

Velocity distributions and streamlines at the midplane of the intake duct (IVR = 0.5).
Figure 10 shows the contours of axial velocity \({u}_{x}/{u}_{0}\) and the velocity vectors in the PF plane at IVR = 0.5. The beneficial effect of flow control on axial velocity uniformity is visually evident. The presence of the swirling in the PF plane can be qualitatively assessed through the velocity vectors. In the original inlet duct configuration, clear counter-rotating vortex pairs form at the duct top due to separated flow on the duct ceiling. However, with flow control, the velocity vectors show no significant deflection, indicating an improvement in the flow behavior.

Distributions of axial velocity component and velocity vectors in pump face Plane (IVR = 0.5)
Wide operation reliability
To further evaluate the performance of the optimized OPVG configuration, simulations are conducted at various operating conditions ranging from IVR = 0.3–1.0, which covers the typical range of ship cruising speeds. This allows for a comprehensive assessment of the OPVG performance under different operating conditions beyond the specific operating condition of IVR = 0.5 previously discussed.
Figure 11 illustrates the variations of performance parameters of the intake duct with the intake velocity ratio (IVR). Across the full operating range (IVR = 0.3–1.0), the MRVG effectively enhances the flow uniformity and significantly reduces the total pressure distortion index at the outlet under all operating conditions. For IVR < 0.7, the swirl distortion at the outlet cross-section is notably improved, while for IVR ≥ 0.7, the performance metrics approach those of the prototype intake duct. Compared with the prototype intake duct, the MRVG-controlled intake duct demonstrates a significantly improved total pressure recovery coefficient for IVR ≤ 0.7. As IVR increases, the total pressure recovery coefficient exhibits an initial rise followed by a decline. For IVR > 0.7, the intake duct’s total pressure recovery coefficient is approximately 3% lower than the prototype’s. The reason for this is that under high IVR conditions, the intake duct no longer experiences flow separation, rendering the MRVG redundant within the flow field. The subsequent decrease in the total pressure recovery coefficient is primarily attributed to the additional drag introduced by the MRVG.

The overall performance parameters of the intake duct at various IVRs.
At high-speed cruise (IVR = 0.5), Table 5 compares the performance of MRVG and VG in waterjet inlet ducts. It can be found that MRVG improves ξ and DC60 more significantly than traditional VG. In particular, MRVG eliminates the negative effects of traditional VG in terms of θ. However, η performance is comparable between the two configurations. Overall, MRVG outperforms traditional VG.
The impact of MRVG on propulsion system performance
According to the efficiency curve shown in Fig. 12, it can be observed that the propulsion pump exhibits high efficiency at the design flow rate (Qdes = 110 kg/s), but efficiency declines rapidly in the low-flow region. The head curve indicates a pronounced “hump” characteristic when the flow rate is between 0.4Qdes and 0.8Qdes, with both head and efficiency dropping sharply around 0.7Qdes. This suggests that in this region, there are abrupt changes in the flow, and flow instabilities such as rotating stall may occur during operation. The turning point of the head curve at 0.8Qdes is designated the critical stall point, whereas 0.4Qdes is known as the deep stall point. Overall, efficiency improves gradually with increasing flow rate but drops rapidly beyond the design operating point. The propulsion pump’s high-efficiency operating range is approximately between 0.8Qdes and 1.2Qdes. The propulsion pump flow rate is 125 kg/s at a speed of 10 m/s, which corresponds to IVR = 0.5.

Characteristic curves of the propulsion pump.
Table 6 presents the performance parameters of the waterjet propulsion pump. With MRVG applied, the pump’s performance improves head and efficiency by 2.90% and 0.12%, respectively. Additionally, thrust and propulsion efficiency of the waterjet propulsion system increase by 2.86% and 1.60%, respectively.
The impact of MRVG on internal flow in the propulsion pump
A As shown in Fig. 13, velocity distortion upstream of the waterjet propulsion pump’s inlet surface is conveyed into the impeller via the intake duct. The low-velocity region is primarily concentrated at the pressure face (PF) top. Inside the impeller, these zones are mainly distributed in the flow passages between blades 1, 5, 4, and 3. Due to blade twisting, this low-velocity region propagates into guide vane flow channels, specifically between blades 1, 2, 3, 4, and 5. However, with MRVG flow control applied, the low-velocity region on the PF surface is significantly reduced. This indicates that MRVG effectively mitigates inlet flow distortions, even upstream of the pump, and improves inflow quality. As the improved inlet flow passes through the impeller, flow distortion at the guide vane outlet (Plane 3) is significantly reduced compared to the ORG configuration. MRVG increases outflow velocity, thereby improving velocity uniformity at the guide vane outlet.

Internal axial velocity distribution within the impeller (IVR = 0.5).
Figure 14 shows the turbulent kinetic energy (TKE) distribution along the flow direction. MRVG reduces high-TKE regions in the inlet flow, leading to a corresponding reduction in high-TKE zones at the guide vane outlet compared to the ORG configuration. This reduction in TKE improves flow stability throughout the system. This analysis indicates that MRVG not only mitigates velocity distortions but also improves overall flow quality and stability, enhancing propulsion pump performance—particularly by improving uniformity and reducing turbulence at critical flow path stages.

Axial distribution of turbulent kinetic energy within the impeller (IVR = 0.5).
MRVG in reducing pressure fluctuations and excitation forces
Pressure fluctuations not only increase noise in the waterjet propulsion system but also reduce its stealth capabilities. When pressure fluctuation frequency matches the structural natural frequency, resonance may occur, potentially causing severe damage to the propulsion system structure. Therefore, studying the impact of inflow distortions on pressure fluctuations and the role of MRVG in mitigating these effects is crucial. To investigate these effects in depth, this study establishes multiple monitoring points on both the suction and pressure sides of the waterjet propulsion pump’s impeller. These monitoring points measure pressure fluctuations and force conditions at various locations. Time-domain pressure signals at each monitoring point were analyzed via Fast Fourier Transform (FFT) to derive frequency-domain spectra. By comparing pressure distributions at each monitoring point before and after MRVG flow control, the effectiveness of MRVG in suppressing pressure fluctuations is evaluated. Figure 15 shows the arrangement of monitoring points along the flow direction. On the impeller’s suction side, monitoring points are sequentially named RP1 to RP4 from inlet to outlet. On the pressure side, they are named RY1 to RY4. For guide vanes, suction side monitoring points from inlet to the outlet are named SP1 to SP4, and pressure side points are named SY1 to SY4.

Monitoring points on the impeller blades.
Figure 16a–f present the pressure spectrum distribution of monitoring points on the suction and pressure sides of the rotor blade, respectively. At the three spanwise locations (0.1 span, 0.5 span, and 0.9 span), the dominant frequency of pressure fluctuations at both suction and pressure side monitoring points is the shaft frequency (fn), indicating that the rotational motion of the rotor dominates the flow characteristics, regardless of the spanwise variation. However, as the flow moves along the blade from the leading edge to the trailing edge, the gradual decrease in pressure fluctuation amplitude reflects the stabilization of the flow, with a reduced influence of pressure pulsations. In the trailing edge region, the secondary frequency corresponding to the guide vane passing frequency (9fn) is observed, which is induced by rotor–stator interaction. Among the three spanwise locations, the monitoring points at 0.1 span and 0.9 span exhibit higher pressure fluctuation amplitudes compared to those at 0.5 span. Notably, the monitoring point at the leading edge of 0.9 span shows the largest pressure fluctuation amplitude on the pressure side of the rotor blade. Radially, the flow near the hub region is more stable, while at lower spanwise locations (0.1 span), stronger boundary layer development tends to occur, leading to greater flow separation and enhanced pressure fluctuations. At higher spanwise locations (0.9 span), the rotor’s rotational effects and the presence of complex vortical structures, such as tip leakage vortices, intensify pressure fluctuations. The inherently higher instability of the flow at greater spanwise locations also contributes to a stronger pulsation response. Conversely, the 0.5 span position experiences lower pressure fluctuation amplitudes due to smoother flow, reduced boundary layer interference, and lower energy losses.

Frequency domain of pressure fluctuations at different blade heights on the impeller blade.
Compared to the ORG case, the implementation of MRVG significantly reduces the dominant frequency pressure amplitudes at the suction side monitoring points, with the largest reduction in pressure fluctuations at the leading edge reaching 29.9%. This demonstrates that MRVG effectively mitigates inflow distortion and consequently has a substantial suppressive effect on pressure fluctuations in the rotor blades of the propulsion pump.
Figure 17 presents the frequency domain distribution of the forces acting on the impeller blades of the propulsion pump. Under the ORG, the pulsation trends of both axial and radial forces on the impeller blades are similar, and their vibration frequencies are both centered around the shaft frequency (fn). Specifically, the primary frequency for both axial and radial forces is the shaft frequency (fn), indicating that under the original inlet distortion conditions, the force fluctuations on the impeller blades are predominantly concentrated at this frequency. However, following the application of MRVG flow control, the force characteristics of the impeller blades exhibit significant changes. In particular, the amplitude of the main frequency of axial force decreases by approximately 54%, while the amplitude of the main frequency of radial force decreases by approximately 60%. These results indicate that MRVG effectively reduces the amplitude of the main frequency of the forces acting on the impeller blades, thereby mitigating the force fluctuation issues caused by non-uniform inlet flow. This improvement not only reduces the noise and vibration induced by force fluctuations but also enhances the operational stability and performance of the propulsion pump in practical applications.

Forces on the impeller blades.
Conclusion
In this work, the application of a MRVG is investigated for the suppression of ramp-side flow separation in an intake duct at low flow conditions. Various parameters such as VG geometry and array spacing are studied to achieve a weighted multi-objective optimization for optimal inlet performance. The findings indicate that the proper configuration of MRVG is robust and effective across a wide range of operating conditions. The results are summarized as follows:
-
1.
Following parameter screening, the optimal MRVG configuration in terms of local boundary layer thickness is determined to be H/δ = 0.348, A = 24°, L/H = 5.125, and S/H = 5.94. At the MRVG design condition of IVR = 0.5, the value of ξ decreases by 41.5% compared to the original intake duct, θ decreases by 74.0%, DC60 decreases by 61.6%, and η increases by 8.4%. However, when IVR is larger than 0.7, there is no flow separation in the original intake duct. MRVG still reduces outflow distortion to a limited extent but introduces an additional drag penalty of approximately 1.5%.
-
2.
At IVR = 0.5, after applying the MRVG flow control technology, the secondary flow in the impeller flow passage of the propulsion pump can be further suppressed, and the velocity distribution at the guide vane outlet becomes more uniform compared to the ORG configuration. The thrust and propulsion efficiency of the waterjet propulsion system increased by 2.86% and 1.60%, respectively. Furthermore, when the inlet flow is free of (or with low) distortion, the MRVG has no negative impact on the propulsion system performance.
-
3.
The impact of inlet flow distortion is primarily concentrated in the impeller flow, with the most intense pressure fluctuations occurring at the impeller inlet. These fluctuations are predominantly characterized by the shaft frequency, with the amplitude of the fluctuations being related to the degree of distortion. MRVG reduces the amplitude of pressure fluctuations inside the impeller, with the shaft frequency pressure fluctuation amplitude at the pressure side of the impeller inlet decreasing by 40.86%.
-
4.
After applying the MRVG flow control technology, the amplitude of the excitation force on the impeller at fn is significantly reduced by 60%. This indicates that MRVG effectively suppresses the inlet flow distortion, thereby weakening the excitation forces induced by the distortion. This reduction in vibration intensity has a beneficial impact on the overall operational reliability of the propulsion pump.
Data availability
The data used in this study are available upon request from the corresponding author.
References
Park, W. G. et al. Numerical flow simulation of flush type intake duct of waterjet. Ocean Eng. 32(17–18), 2107–2120 (2005).
Willem, N. & Bulten, H. Numerical analysis of a waterjet propulsion system. Technische Universiteitndhoven (2006).
Roberts, J. The influence of hull boundary layers on waterjet intake performance. University of Tasmania (1998).
Hu, P. X. & Zangeneh, M. Investigations of 3D turbulent flow inside and around a waterjet intake duct under different operating conditions. J. Fluid Eng. T Asme. 121(2), 396–404 (1999).
Jung, K. H. et al. Investigation of turbulent flows in a waterjet intake duct using stereoscopic PIV measurements. J. Mar. Sci. Tech. Japan 11(4), 270–278 (2006).
Cao, P. Y. et al. Investigation of the role of non-uniform suction flow in the performance of waterjet pump. Ocean Eng. 140, 258–269 (2017).
Duerr, P. & von Ellenrieder, K. D. Peer-reviewed technical communication…scaling and numerical analysis of nonuniform waterjet pump inflows. IEEE J. Ocean. Eng. 40(3), 701–709 (2015).
Huang, R. F. et al. Multi-objective optimization of the flush-type intake duct for a waterjet propulsion system. Ocean Eng. 187, 106172 (2019).
Zhang, F. W. Q., Zhao, X., Liu, Y. & Wand, G. Multi-objective optimization of intake duct of waterjet propulsion based on response surface method. Acta Armament. 41, 2071 (2020).
Ng, Y. T. et al. Three techniques to control flow separation in an S-shaped duct. Aiaa J. 49(9), 1825–1832 (2011).
Taylor. The elimination of diffuser separation by vortex generators. United Aircraft Corp 4012(3) (1947).
Wojewodka, M. M. et al. A review of flow control techniques and optimisation in s-shaped ducts. Int. J. Heat Fluid Flow 74, 223–235 (2018).
Brandner, P. A., Dawson, E. C. & Walker, G. J. An experimental investigation into the influence of ramp-mounted vortex generators on the performance of a flush waterjet inlet. J. Ship. Res. 54(3), 209–223 (2010).
Brandner, P. A. & Walker, G. J. Hydrodynamic performance of a vortex generator. Exp. Therm. Fluid Sci. 27(5), 573–582 (2003).
Huang, C. L., Dai, R. & Wang, Z. L. Effects of upstream vortex generators on the intake duct performance for a waterjet propulsion system. Ocean Eng. 239, 109838 (2021).
Zhai, S. et al. Study on the application of vortex generator to suppress ship propeller cavitation excitation. Ship. Offshore Struct. 20(1), 99–110 (2025).
Saydam, A. Z., Gokcay, S. & Insel, M. CFD based vortex generator design and full-scale testing for wake non-uniformity reduction. Ocean Eng. 153, 282–296 (2018).
Sun, T. et al. Evaluation of effect of micro-vortex generator on dynamic characteristics of unsteady partial cavitating flow over hydrofoil. Ocean Eng. 257, 111601 (2022).
Kadivar, E. et al. Control of unsteady partial cavitation and cloud cavitation in marine engineering and hydraulic systems. Phys. Fluids 32(5), 052108 (2020).
Lin, J. C. Review of research on low-profile vortexgenerators to.pdf. Progress in Aerospace Sciences (2002).
Brandner, P. A. D. E. C. & Walker, G. J. An experimental investigation into the performance of a flush waterjet inlet. J. Ship Res. 51(1), 1–21 (2007).
Anderson, B. H., Tinapple, J. & Surber, L. Optimal control of shock wave turbulent boundary layer interactions using micro-array actuation. In Proceedings of the 3rd AIAA Flow Control Conference, F (2006).
Wang, K. Z. B., Li, J. & Zhao, Q. Optimizing of the structural parameters of an asymmetric ramp micro-vortex generator in supersonic flow. J. Eng. Thermophys. (2016).
Qiu, J., Yin, X. & Wang, R. Hydrodynamic performance analysis of waterjet propulsor inlet duct. Chin. J. Ship Res. (2022).
Xu, H. et al. A wall-modeled large-eddy simulation of the unsteady flow in a waterjet pump based on the turbulent length scales. Ocean Eng. 313, 119559 (2024).
Liu, C., Amei, B. &Yi. Z. et al. Surrogate-based optimization and experiment validation of a fan-shaped film cooling hole with a large lateral space. Appl. Thermal Eng. 207 (2022).
Zhu, R., Cao, P., Wang, Y. & Ning, C. Multi-objective hydraulic optimization on intake duct of waterjet propulsion using NSGA-II. In ASME Engineering Conference Proceedings (2019).
Author information
Authors and Affiliations
Contributions
All authors wrote the body of the manuscript. All authors reviewed the manuscript.
Corresponding author
Ethics declarations
Competing interests
The authors declare no competing interests.
Additional information
Publisher’s note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
Open Access This article is licensed under a Creative Commons Attribution-NonCommercial-NoDerivatives 4.0 International License, which permits any non-commercial use, sharing, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons licence, and indicate if you modified the licensed material. You do not have permission under this licence to share adapted material derived from this article or parts of it. The images or other third party material in this article are included in the article’s Creative Commons licence, unless indicated otherwise in a credit line to the material. If material is not included in the article’s Creative Commons licence and your intended use is not permitted by statutory regulation or exceeds the permitted use, you will need to obtain permission directly from the copyright holder. To view a copy of this licence, visit http://creativecommons.org/licenses/by-nc-nd/4.0/.
About this article

Cite this article
Chen, L., Ma, X. & Dai, R. Influences of micro ramp vortex generators on the performance of flush waterjet propulsor. Sci Rep 15, 31278 (2025). https://doi.org/10.1038/s41598-025-10694-8
Received:
Accepted:
Published:
Version of record:
DOI: https://doi.org/10.1038/s41598-025-10694-8
