
Abstract
This paper presents an improved design to address the issue of elevator jamming in aircraft. The proposed solution involves an auxiliary spare tail system, featuring a foldable spare tail unit integrated with the primary empennage, which is extended in emergency situations. Deflection of this spare tail is designed to generate an additional pitching moment, thereby providing a measure of pitch control for the aircraft. Both the primary and spare tail surfaces utilize the NACA0012 airfoil. The Spalart-Allmaras turbulence model was selected for the simulations, which were conducted at a freestream Mach number of 0.6. Computational Fluid Dynamics (CFD) simulations, employing a dynamic mesh technique, were performed to analyze the aerodynamic behavior of the tail system during an elevator jamming scenario. The results indicate that the deployment and appropriate deflection of the spare tail can generate sufficient additional pitching moment, effectively mitigating the loss-of-control problem resulting from an elevator malfunction.
Similar content being viewed by others

Introduction
In recent years, technological advancements have spurred rapid development in transportation, with air travel becoming a prominent choice for many. Consequently, aviation safety has garnered increasing attention and emerged as a significant societal concern. Issues arising from horizontal stabilizer failure and degraded pitch stability, which can lead to aircraft stalls, uncontrolled descents, or nosedives, constitute a critical research area impacting aviation safety. Flight accident types are commonly classified into categories such as Controlled Flight (CF), Loss of Control In-flight (LOC-I), Runway Safety (RS), Ground Safety (GS), Operational Damage (OD), and Aircraft Fire (FIRE), among others. LOC-I, RS, CF, and OD are considered high-risk accident categories. Notably, fatalities resulting from LOC-I incidents are on an upward trend, exceeding those from CF and RS by over 10%, and have become the leading cause of fatalities in civil aviation accidents1. For instance, on April 6, 1999, China Eastern Airlines Flight 586 experienced a partial failure of its elevator system while approaching Shanghai Hongqiao Airport, resulting in unstable flight control. On November 12, 2000, American Airlines Flight 587 experienced an in-flight breakup shortly after takeoff, leading to 265 fatalities. The accident was attributed to excessive elevator inputs by the pilot post-takeoff, causing elevator overload, subsequent jamming, and structural failure2. On January 31, 2000, Alaska Airlines Flight 261 crashed after a jammed horizontal stabilizer impeded the operation of its pitch trim system3. Furthermore, in icing meteorological conditions, ice accretion can occur on aircraft leading edges. Icing on the horizontal stabilizer significantly affects flight control, leading to consequences such as a reduced lift coefficient for the tailplane, diminished pitch stability, a smaller critical negative angle of attack for the tailplane, premature airflow separation, and decreased elevator effectiveness4.These incidents underscore the critical importance of the elevator system and the complexities associated with its maintenance and operation in ensuring aviation safety.
To mitigate the impact of elevator malfunctions on flight safety, researchers and engineers worldwide have conducted extensive studies. In 2001, Gaurav Bajpai et al.5 investigated elevator jamming by simulating such scenarios and attempting to maintain aircraft controllability by adjusting engine thrust. However, their findings indicated that this approach, relying solely on thrust modulation for control input, was only effective for regulating the flight path angle. In 2014, Syed, Sana et al.6designed a direct adaptive model reference controller (D-MRAC) based on Lyapunov theory. This controller aimed to enhance the performance and robustness of the flight control module, ensuring satisfactory aircraft performance during instances of degraded or failed tail control surface effectiveness. The researchers performed numerical simulations to validate the controller’s efficacy under elevator jamming conditions. The results demonstrated that, compared to non-adaptive and optimal Linear Quadratic Regulator (LQR) controllers, the D-MRAC significantly improved aircraft handling in elevator fault scenarios. Subsequently, in 2015, to enhance flight control system performance, increase control surface efficiency, and reduce flight accidents stemming from elevator malfunctions, Xingjian Wang et al.7 proposed a suitable switching mechanism incorporating a performance improvement factor to augment the longitudinal control of large civil aircraft, thereby achieving superior fault-tolerant control performance. In 2016, Chang, Bor-Chin et al.8, addressing the aircraft safety threat posed by elevator jamming as highlighted in the IEEE Conference on Control Applications (CCA), designed a tracking controller to identify the location of an elevator jam fault. They leveraged the adaptive capabilities of this controller to achieve flight stability and maintain level flight. Furthermore, Deepak Gaur et al.9, aiming to prevent accidents caused by elevator jamming, investigated elevator design structures and manufacturing materials. They discovered that manufacturing elevators from an Al-0.5%Sc alloy could reduce the occurrence of jamming, indicating the potential application value of this novel alloy in the optimal design and fabrication of aircraft control surfaces. Evidently, to prevent flight accidents attributable to elevator malfunctions, researchers have undertaken multifaceted, multi-angle, and multi-level investigations into aircraft elevators. These studies encompass areas such as elevator control circuitry, fault location tracking, and manufacturing materials.
Aslan et al.10significantly enhanced the path planning performance of Unmanned Aerial Vehicles (UAVs) in threat environments by employing improved adaptive optimization algorithms to handle complex constrained problems. Their effectiveness in addressing aircraft control problems warrants consideration. Furthermore, existing research has demonstrated that artificial intelligence (AI) techniques, such as Artificial Neural Networks (ANN) and Artificial Bee Colony (ABC) algorithms, can effectively optimize the aerodynamic stability of aircraft11,12 and enhance autonomous flight performance through the integrated design of vertical tails and flight control systems13. Oktay et al.14achieved optimal lateral-directional autonomous performance for tactical UAVs by integrating passive and active morphing strategies, while Aslan and Oktay15utilized an improved immune plasma algorithm for path planning of Unmanned Combat Aerial Vehicles (UCAVs). These studies have significantly advanced the development of integrated aircraft structure-control system design. However, there remains a paucity of research on tail structure designs specifically addressing control surface failure under elevator jamming conditions. Therefore, this paper addresses the issue of aircraft elevator jamming by proposing a modification to the tail structure to resolve the loss-of-control problem stemming from such malfunctions.
The novel tail design concept presented in this paper draws inspiration from the following studies: The redesign of a UAV’s Automatic Flight Control System (AFCS) by Şahin16prompted the idea of redesigning the tail assembly to address analogous problems. Kose and Oktay17 demonstrated that real-time adjustment of aircraft structural parameters can optimize stability during loss-of-control scenarios. The core idea of their work—involving structural reconfiguration synergistically designed with the control system to manage UAV loss-of-control—informed our approach of redesigning the tail structure to counter elevator jamming. In another of their publications18, their work on the arm length design of hexarotor UAVs and associated longitudinal control techniques also offered insights for our novel tail design. Yesilbas et al.19, by concurrently optimizing the vertical tail structure and the flight control system, effectively enhanced the autonomous flight capabilities of Tactical Unmanned Aerial Vehicles (TUAVs). The moving boundary control strategy proposed by Fale et al.20, which improves airfoil lift and drag performance at high angles of attack by adjusting surface velocities, and the work by Sal et al.21, who demonstrated that actively adjusting rotor blade root chord and taper during flight can significantly reduce the energy required by the flight control system—these aforementioned concepts of “active aerodynamic control” and “in-flight adjustable structures”—provided key inspiration for the tail design in this paper. Concurrently, the research by Oktay et al.22,23, which explored the impact of rotor blade taper variations on flight control moments, prompted our focus on the moments generated by the modified tail system.
In recent years, numerical simulation has been widely adopted in engineering research24 and has likewise been extensively promoted and achieved significant success in the aerospace sector. Computational Fluid Dynamics (CFD) technology has been applied across various fields, including automotive design, turbomachinery, ship design, and aircraft manufacturing. Eftekhari et al.25 utilized CFD techniques to simulate airfoils or aircraft, demonstrating very small discrepancies compared to experimental data, sufficient for practical design purposes. In 2010, Pelletier, Dominique26 discussed the issues of verification, validation, and uncertainty quantification in CFD. Examples of successful and failed validation studies indicated that reliable predictions can only be achieved through the use of appropriate physical-mathematical models and accurate numerical solutions to the governing differential equations. In 2011, Schütz27 employed CFD techniques for aerodynamic validation, introducing a complete aerodynamic computation workflow based on the open-source software OpenFOAM. This workflow involved mesh generation in three stages: the first stage encompassed generating an orthogonal hexahedral mesh with user-defined refinement levels; the second stage involved projecting the cell faces at the mesh boundary onto the model surface; and the third stage was the computational solution. This process provided a significant framework for subsequent aerodynamic research using CFD. In 2013, Luís Eça et al.28 investigated mesh generation, a critical component of CFD, discussing discretization error estimation based on power series expansions for sets of geometrically dissimilar meshes. Using simple test cases with structured and unstructured meshes, their results demonstrated that higher mesh density leads to simulation results that more closely approximate actual values. Therefore, employing CFD techniques for aerodynamic simulation of aircraft and utilizing the resultant data for dynamic calculations is both feasible and reliable.
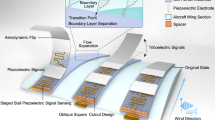
With the objective of enhancing aircraft safety and reducing accidents caused by tail assembly failures or control surface jamming, this paper, based on an analysis of aircraft tail structures, proposes a holistic design concept termed a “three-in-one” vertical tail. A novel tail assembly embodying this concept has been designed to mitigate the impact of elevator malfunctions on flight safety. Specifically, this involves incorporating an auxiliary spare tail unit onto the aircraft’s vertical tail to provide the necessary additional pitching moment during elevator jamming incidents. The design model is illustrated in Figs. 1 and 2. A conventional tail system (representative of the structure on most current aircraft), depicted in Fig. 1, operates in a conventional tail wing attitude mode. Upon encountering an elevator jam, the spare tail, initially folded onto the vertical tail, are deployed upwards, transitioning the tail system into a spare tail wing attitude mode, as shown in Fig. 2. When the elevator of the primary tail jams, the resultant moment will cause the aircraft to continuously pitch up or pitch down. In this scenario, the spare tail wing attitude mode is activated: the spare tail is deployed, and the moment they generate is utilized to counteract the moment produced by the jammed primary elevator, while also providing an additional corrective moment to ensure aircraft controllability.
This paper employs CFD techniques to conduct aerodynamic simulations and analyses of the aircraft tail assembly in both its conventional and spare tail attitude modes. The effectiveness of this design proposal is validated from the perspectives of aerodynamic principles and flight dynamics. This tail design has been granted a Chinese National Invention Patent29.

The conventional tail wing attitude mode.

The spare tail wing attitude mode.
Model and methods
Geometric models
NACA series airfoils, developed in the United States, are low-speed airfoils that offer the advantages of a high lift coefficient and a low drag coefficient compared to various other airfoil families. In this study, CFD techniques are employed for mesh generation of the aircraft model. The airfoil selected for the aircraft tail model is the low-speed NACA0012. This particular airfoil was chosen due to the extensive availability of experimental and simulation data, which facilitates the validation of the present study’s accuracy. Xiaojing Sun et al.30 investigated the aerodynamic characteristics of the NACA0012 airfoil section, finding that it exhibited a greater delay in dynamic stall angle and a higher lift-to-drag ratio at relatively large angles of attack compared to other conventional airfoils. Sharma, Dishant et al.31 studied the lift coefficient and drag performance metrics of the NACA0012 airfoil at its critical angle of attack, observing that under deep stall oscillation conditions, the NACA0012 airfoil demonstrated superior performance results for both lift coefficient and drag characteristics. Ajay Yadav et al.32 measured the aerodynamic characteristics of the NACA0012 airfoil at various angles of attack in a low-speed subsonic wind tunnel, characterizing the pressure distribution at different locations on the airfoil, which provides a significant reference for subsequent airfoil experiments. Owing to the superior aerodynamic performance of the NACA0012 airfoil, it is utilized for further investigation in this paper.
The point coordinates for the NACA0012 airfoil were exported from Profili2 (https://www.profili2.com/), and based on this data, a model was created in CATIA to obtain the NACA0012 airfoil profile. Subsequently, this airfoil was scaled according to the tail dimensions typical of small training aircraft and large transport aircraft to define the horizontal tail (comprising a separate stabilizer and elevator). Its chord length, c1, is 22.5 cm, and the elevator chord length constitutes 18% of the horizontal tail airfoil’s chord length.
The spare tail also employs the NACA0012 airfoil and is modified to function as an all-moving control surface. Its chord length, c2, is 15 cm, with its rotation axis centered at the mid-chord point. The spare tail and the horizontal tail are structurally independent.
The vertical spacing between the horizontal tail and the spare tail is c1, and the leading edges of both airfoils are aligned on the same vertical line. Two-dimensional (2D) geometries of the modified tail assembly in its normal mode and emergency mode were created in ANSYS ICEM, as illustrated in Figs. 3 and 4. When calculating the moment, the horizontal tailplane and the spare tail wing have a span of 1 m.

2D graph of tailplane normal mode.

2D graph of tailplane emergency mode.
Turbulence model
This study employs the Spalart-Allmaras turbulence model. It has been demonstrated to effectively enhance the boundary layer subjected to adverse pressure gradients33. The Spalart-Allmaras34model is, in essence, a viscous flow model, which is extended through a wall treatment approach that is insensitive to the\({y^+}\)value, thereby making the model’s applicability independent of near-wall\({y^+}\)resolution. Originally developed for the aerospace industry, the Spalart-Allmaras model offers the advantage of seamless implementation within unstructured CFD solvers35. The advantages of the Spalart-Allmaras model are manifested in the following aspects36::
(1) It requires the solution of only a single transport equation, resulting in faster computation compared to other turbulence models.
(2) It provides superior results in the case of adverse pressure gradient problems.
(3) It yields effective results for boundary layer problems of moderate complexity.
(4) It offers significant advantages when implemented in unstructured CFD solvers.
In the Spalart-Allmaras model, the transported variable is identical to the turbulent kinematic viscosity, except in the near-wall (viscosity-affected) region. The transport equation for the modified turbulent viscosity, as obtained from the user guide of ANSYS FLUENT37 is\(\tilde {v}\)
\({G_v}\)is the production of turbulent viscosity, and\({Y_v}\)is the destruction of turbulent viscosity that occurs in the near-wall region due to wall blocking and viscous damping. \({\sigma _{\tilde {v}}}\)and\({C_{b2}}\)are the constants, and v is the molecular kinematic viscosity.\({S_{\tilde {v}}}\)is a user-defined source term.
The turbulent viscosity coefficient is obtained through the following formula.
The viscous damping function is given by\({f_{v1}}\)
and\(\chi \equiv \frac{{\tilde {v}}}{v}\)
The production term, is modeled as\({G_v}\)
where
and
\({C_{b1}}\)and k are constants, d is the distance from the wall, and S is a scalar measure of the deformation tensor. By default in Ansys Fluent, S is based on the magnitude of the vorticity:
where is the mean rate-of-rotation tensor and is defined by\({\Omega _{ij}}\)
Since the mean strain rate plays a significant role in turbulence generation, defined as S
Where \({C_{prod}}=2.0\), \(\left| {{\Omega _{ij}}} \right| \equiv \sqrt {2{\Omega _{ij}}{\Omega _{ij}}}\), \(\left| {{S_{ij}}} \right| \equiv \sqrt {2{S_{ij}}{S_{ij}}}\),with the mean strain rate, defined as\({S_{ij}}\)
Considering both the rotational tensor and the strain tensor helps reduce the generation of turbulent viscosity, thereby lowering the turbulence viscosity itself in regions where the vorticity dominates over the strain rate. Based on this principle, it can be observed that in a rotating flow, the flow near the core of pure rotation, which is influenced primarily by rotational effects, experiences turbulence suppression.
Computational domain mesh
He Xin et al.38 proposed a combined usage of structured and unstructured meshes, termed a hybrid mesh. To validate the computational accuracy of this hybrid approach, they performed numerical simulations on the NLR7301 airfoil using both hybrid and purely unstructured meshes. The simulation results indicated a high degree of consistency between the outcomes from the hybrid and unstructured meshes, thereby demonstrating the effectiveness and reliability of the hybrid mesh methodology for aerodynamic analysis.
In this paper, ANSYS ICEM and ANSYS FLUENT are utilized for hybrid unstructured mesh modeling of the NACA0012 airfoil. To mitigate mesh interface effects, the unstructured region within the computational domain has a diameter of 8c2 and employs triangular mesh elements. To reduce computational cost and minimize the impact of the dynamic mesh on larger grid cells, the outer region of the mesh is structured, with a diameter of 20c2, as illustrated in Figs. 5 and 6. The pressure far-field boundary condition was set with a velocity corresponding to Mach 0.6 and a temperature of 300 K. The air density was modeled using the ideal gas law.
For the boundary layer region, the distance of the first mesh node from the wall was set to \(1 \times {10^{ - 5}}\)m, with a boundary layer growth rate of 1.3 and a total of 15 layers, as illustrated in Fig. 7.
This study analyzes the impact of varying deflection angles of the deployed spare tail on the overall tail system. During this process, the spare tail rotates about its central axis. To enhance mesh adaptability and facilitate the investigation of airflow characteristics around the tail system, dynamic mesh techniques were employed. A systematic analysis of the gas flow features around the tail assembly was conducted using mesh smoothing and remeshing methods39. Furthermore, this paper explores the fluid dynamic mechanisms arising from the coupled interaction of the dual tail configurations. Dynamic mesh technology is a mature numerical simulation method, and its detailed technical aspects will not be elaborated further here40.

The mesh combination and distribution of internal triangular meshes around the airfoil and external structured meshes.

Mesh generation of the airfoil in the local region for both the deployed and stowed configurations of the spare tail wing.

Near-wall mesh.
Boundary conditions
Due to the large gradients of flow variables in the vicinity of walls, the wall significantly influences turbulence calculations and thus requires special treatment. One approach is the wall function method, which employs semi-empirical formulas to bridge the turbulence in the outer flow region with the flow behavior near the wall. An alternative approach is the near-wall modeling method, which involves refining the mesh in the near-wall region and, concurrently, adapting the turbulence model for the solution in this zone. This study adopts the near-wall modeling approach to resolve the wall-bounded flow. The atmospheric pressure was set to 101,325 Pa, the turbulent viscosity ratio to 10, and the temperature to 300 K. The inlet was defined as a pressure far-field boundary with a velocity corresponding to Mach 0.6. This velocity was selected as it represents a typical flight speed for many aircraft operating in the subsonic regime, particularly during cruise or climb phases.
Numerical methods
A stable flow behavior occurs around the two-dimensional airfoil (including the wake region). In order to avoid unnecessary computational complexity, the subsequent assumptions have been integrated into the computational framework delineated in this study:
(1) The gas is treated as an ideal-gas, following the ideal-gas equation of state.
(2) Radiative heat transfer, gravity, and body forces are neglected.
(3) Adiabatic boundary condition, meaning heat cannot be transferred through the boundary into or out of the flow field.
This research predominantly utilizes the Spalart-Allmaras model grounded on the Reynolds-averaged Navier-Stokes (RANS) equations. The Spalart-Allmaras model has been previously described in Sect. 2.2.
The computations were performed using a pressure-based, double-precision, implicit unsteady solver within ANSYS FLUENT. The numerical methodology is founded on the Finite Volume Method. Gradient interpolation is based on the least-squares cell-based method, accompanied by standard pressure interpolation. The density, momentum, and energy equations were discretized using a first-order upwind scheme. Pressure-velocity coupling was facilitated through the implementation of the SIMPLEC algorithm. A first-order implicit scheme was employed for the discretization of the temporal transient terms, with a time step of \(1 \times {10^{ - 5}}\)s.
Calculation verification
Mesh independence verification
To assess grid sensitivity, the Grid Convergence Index (GCI) proposed by Roache41 was employed for verification. In this study, three mesh resolutions were generated for the spare tail section in its deployed configuration: a coarse mesh with 93,196 cells, a medium mesh with 154,072 cells, and a fine mesh with 221,985 cells. As mesh density increases, the validity of the data obtained from CFD solutions progressively improves. A comparative analysis between the medium and fine meshes revealed that the influence of mesh refinement on the solution results diminishes with increasing mesh density. The maximum value of GCI₁₂ (the GCI calculated between the fine and medium meshes) was found to be 0.00076, which is considered acceptable within the scope of engineering calculations42, as illustrated in Fig. 8. Consequently, all two-dimensional computations in this paper were performed using the fine mesh.

Mesh independence verification.
Validation of simulation method with wind tunnel experiment
To verify the numerical calculation method and the independence of the turbulence model in this paper, the NACA0012 airfoil was meshed, and three different turbulence models (Spalart-Allmaras, SST k-ω, k-e) were used to solve this numerical model by CFD technology. The results were compared with the wind tunnel experimental analysis results of Andro Rak et al. on the NACA0012 airfoil43. The wind tunnel images can be found in this literature43. The wind tunnel experiments conducted by Andro Rak et al. was carried out using Techquipment’s ISO 9001 certified AF1300 subsonic open-circuit suction wind tunnel. The test section dimensions are 305 mm by 305 mm, with a length of 600 mm. The overall wind tunnel measures 3,700 mm in length, 1,065 mm in width, and 1,900 mm in height. Experimental data were collected using multiple ISO 9001-certified Techquipment sensors positioned within the test section. In order to make the experimental results accurate, the trailing edge of the airfoil has been positioned at the same height as the center line of the model holder. The wind tunnel experimental data is recorded every 0.5 s, over a total duration of 300 s. The NACA0012 airfoil used in the wind tunnel experiments had a chord length of 150 mm and a span of 300 mm. The experiments were conducted at an airfoil angle of attack of 8°, an atmospheric temperature of 27 °C, an atmospheric pressure of 1015.2 hPa, an air density of 1.18 kg/m³, and an inlet velocity of 20 m/s. The comparison of these results is presented in Fig. 9.

CFD and wind tunnel data comparison.
The error between the CFD simulation data and the wind tunnel test data, as depicted in Fig. 9, can be quantified by comparing the standard deviations of the airfoil surface pressure coefficients. The formulas are as follows:
\({\sigma _{up/down}}\)is the sample standard deviation of the pressure coefficient on the upper/lower surface of the airfoil from the wind tunnel experiment. n is the number of data points in the sample, \({C_{{p_{{1_i}}}_{{up/down}}}}\)is the pressure coefficient at various locations on the upper/lower surface of the airfoil measured in the wind tunnel experiment, and\({\bar {C}_{{p_1}_{{up/down}}}}\)is the average pressure coefficient on the upper/lower surface measured in the wind tunnel experiment. In the wind tunnel experiment, 10 samples are selected for computation.
\({\eta _{up/down}}\) is the sample standard deviation of the pressure coefficient on the upper/lower surface of the airfoil from the CFD simulation data. n is the number of data points in the sample, \({C_{{p_{{2_i}}}_{{up/down}}}}\)is the pressure coefficient at various locations on the upper/lower surface of the airfoil obtained from the CFD simulation, and\({\bar {C}_{{p_2}_{{up/down}}}}\)is the average pressure coefficient on the upper/lower surface obtained from the CFD simulation. In the CFD solution results, 300 samples are selected for computation.
The error calculation formula is:
.
The calculations show that in this model, the maximum error for the S-A turbulence model is 4.9%, for the SST k-ω turbulence model is 6.8%, and for the k-e turbulence model is 8%. Overall, the experimental results are in good agreement with the numerical results, and the S-A turbulence model is the most accurate.
Additionally, to further validate the independence of the Spalart-Allmaras turbulence model, some literature can provide better explanations for its verification. Vitaly Voloshin et al.44 used four different turbulence models to simulate an airship at various angles of attack and compared the results with wind tunnel experimental data. Their findings indicated that the Spalart-Allmaras turbulence model was optimal in most cases. Tafsirul Hassan et al.45 performed numerical simulations on NACA0012 and NACA2412 airfoils, evaluating five different turbulence models by comparing their solutions with wind tunnel experimental data to verify their performance. The results showed that the Spalart-Allmaras model provided the most accurate performance simulation for both airfoils.
Based on the aforementioned studies, the Spalart-Allmaras turbulence model exhibits reliability and accuracy in experimental comparisons. This study utilizes this turbulence model for the numerical simulation of the airfoil.
Analysis of the computational results
Establishment of the simulation case for elevator jamming
The aircraft elevator is integral to pitch control, and elevator jamming can lead to severe flight safety issues. If a malfunction prevents normal elevator deflection, the aircraft may enter a continuous nosedive, potentially resulting in a crash, or it may pitch up uncontrollably, leading to a stall and spin. This paper considers scenarios of elevator jamming with the spare tail in both deployed and stowed configurations. Computational models are established for each case to comparatively analyze the overall aerodynamic and dynamic characteristics after spare tail deployment, thereby validating its effectiveness.
The designed control surface deflection scenarios are as follows:
For Small Aircraft (with a conventional horizontal stabilizer and elevator):
(1) Pilot pushes control column forward: The elevator jams at its maximum downward deflection, causing the aircraft to nosedive.
(2) Pilot pulls control column back: The elevator jams at its maximum upward deflection, causing the aircraft to pitch up and climb.
For Large Aircraft (with a Trimmable Horizontal Stabilizer (THS) and elevator):
(1) THS jams at maximum clockwise deflection: The THS rotates clockwise around its pivot point to its maximum angle and jams, causing the aircraft to nosedive. The pilot pulls the control column back, deflecting the elevator upwards, in an attempt to counteract the nosedive tendency.
(2) THS jams at maximum counter-clockwise deflection: The THS rotates counter-clockwise around its pivot point to its maximum angle and jams, causing the aircraft to pitch up and climb. The pilot pushes the control column forward, deflecting the elevator downwards, in an attempt to counteract the pitch-up tendency.
For both small and large aircraft, the maximum upward elevator deflection is 30°, and the maximum downward elevator deflection is 15°. For large aircraft, the maximum clockwise and counter-clockwise deflection angles for the THS are both 20°. Therefore, this paper simulates aircraft control surface jamming for the following eight case studies, with the aircraft at a 0° angle of attack for all conditions, as detailed in Table 1. The results were obtained through computations performed in ANSYS FLUENT.
The aerodynamic effects of the aircraft tailplane
In general, the center of the aircraft does not coincide with the aerodynamic center of the wing. To achieve pitch stability and maintain level flight, trim adjustments are necessary. During this process, the lift required to balance the aircraft’s weight is not solely provided by the wing’s lift, but also by the lift generated by the horizontal tailplane. This lift, which counteracts the aircraft’s weight, is typically referred to as the “balancing lift.”
In conventional aircraft configurations, the center of gravity is generally located ahead of the wing’s aerodynamic center, causing a downward moment due to the lift-to-weight ratio. To maintain equilibrium, the horizontal tailplane must generate a negative lift, ensuring the wing’s lift exceeds the balancing lift, thereby producing an upward moment.
In order to generate the required negative lift, the installation angle of the tailplane in commercial aircraft typically ranges from − 1° to −3°, while for small general aviation aircraft, it typically falls between − 2° and − 3°46. Assuming that both commercial and small general aviation aircraft have a tailplane installation angle of −2°, the flow characteristics around the tailplane system, as shown in Fig. 10, indicate that the pressure on the upper surface of the horizontal tailplane exceeds that on the lower surface, thereby generating negative lift. The calculated moment generated at this time is −1342.67 N·m. The reference center of gravity is located 1.03 m in front of the tailplane’s center.

The flow field diagram of the horizontal tailplane in a conventional attitude mode.
The typical structure of the tailplane of a small aircraft
The typical tail structure for controlling the pitch motion of small aircraft consists of a horizontal stabilizer and an elevator. This subsection analyzes the characteristic flow features of the tail system during elevator jamming scenarios and investigates the corresponding dynamic behavior.
Analysis of the typical flow characteristics of the tailplane system of a small aircraft
The elevator is jammed with a 15° downward Deflection
When the elevator jams at a 15° downward deflection, the aircraft will enter a nosedive if no corrective action is taken. This section provides a comparative analysis of the flow characteristics for scenarios with the spare tail in both closed and deployed configurations.
To systematically analyze the flow features around the tail assembly, dynamic mesh techniques were employed. Simulations were conducted for the aircraft at a 0° angle of attack with the elevator jammed at a 15° downward deflection. In these simulations, the spare tail was deployed, and its angle of attack\({\alpha _s}\)was varied progressively from − 50° to 50°. Additionally, the case with the spare tail closed was considered for comparative analysis.

Case.1 The contour map of the tailplane system under the normal mode.

Case.2 The pressure contour map of the tailplane system under the emergency mode.

Case.2 The velocity streamlines of the tailplane system under the emergency mode.
As shown in Fig. 11, when the spare tail is stowed, the stagnation point on the horizontal tail is located at the junction of its upper and lower surfaces. The pressure acting on the lower surface of the horizontal tail is greater than that on its upper surface, resulting in an overall positive lift. The moment generated causes the aircraft to pitch down, leading to a nose-down pitching moment at the aircraft’s nose, forcing the aircraft into a nosedive.
Figure 12 (a) illustrates that when the spare tail is deployed and its angle of attack\({\alpha _s}\)is − 50°, the pressure on the upper surface of the spare tail is greater than that on its lower surface. The reason for this phenomenon, illustrated in Fig. 13 (a), is the appearance of a backflow vortex near the leading edge of the spare tail’s lower surface. Above this primary backflow vortex, a smaller, counter-rotating vortex, termed a secondary induced vortex, forms. Due to the large negative angle of attack of the spare tail, a strong adverse pressure gradient develops on its lower surface. This accelerates the rotational speed of both vortices. Furthermore, because these two vortices rotate in opposite directions, their interaction further intensifies their rotational speeds, causing the boundary layer to separate more rapidly from the spare tail’s lower surface. This also creates a separated flow region near the lower surface of the spare tail. Compared to its upper surface, this flow separation leads to a pressure decrease on its lower surface. As the tail system transitions from the normal mode to the emergency mode, due to the coupled interaction of the dual tail surfaces, the stagnation point on the horizontal tail shifts upwards from the junction of its upper and lower surfaces to near the leading edge of its upper surface. The negative pressure on the lower surface of the horizontal tail increases, while the negative pressure on its upper surface decreases, indicating a tendency to mitigate the aircraft’s nosedive (loss-of-control) condition.
By comparing Fig. 12 (b) and Fig. 12 (c), as the angle of attack\({\alpha _s}\)of the spare tail wing gradually increases from negative to positive, the pressure on its lower surface escalates, meanwhile, the pressure on its upper surface diminishes. Comparing Fig. 13 (b) and Fig. 13 (c), as the angle of attack\({\alpha _s}\)of the spare tail wing increases and reaches a positive value, the point of separation on its lower surface moves aft. The backflow vortex and secondary induced vortex progressively diminish, facilitating the reattachment of airflow along the trailing edge of the inferior surface. As a result, the severity of airflow detachment decreases, leading to an increase in pressure on the lower surface. When the angle of attack\({\alpha _s}\)of the spare tail wing reaches a positive value and continues to increase, the separation point on the superior surface advances, and the separated flow region expands. This results in the formation of a clockwise-rotating backflow vortex, with the vortex strength increasing. Consequently, the pressure on the upper surface decreases due to the larger airflow detachment area and the growing vortex. As the angle of attack\({\alpha _s}\)of the spare tail wing increases from negative to positive, the stagnation point shifts from the upper surface to the lower surface. This phenomenon is attributed to the effect of the downwash flow induced by the upward deflection of the airfoil, causing the resultant velocity vector of the incoming airflow to deviate downward.
Due to the coupling effect of the twin-tail configuration, the deflected spare tail wing exerts varying degrees of streamwise compression between the spare and horizontal tail surfaces, resulting in different pressure distributions across the tail surfaces. Specifically, under emergency modes, the stagnation point on the horizontal tailplane moves forward, leading to an increase in pressure on its lower surface, while the pressure on the upper surface decreases, although the changes are relatively subtle.
The elevator is jammed with a 30° upward Deflection
When the elevator jams at a 30° upward deflection, the aircraft will pitch up and climb, eventually stalling if no corrective action is taken. This section provides a comparative analysis of the flow characteristics for scenarios with the spare tail in both stowed and deployed configurations.
To systematically analyze the flow features around the tail assembly, dynamic mesh techniques were employed. Simulations were conducted for the aircraft at a 0° angle of attack with the elevator jammed at a 30° upward deflection. In these simulations, the spare tail was deployed, and its angle of attack\({\alpha _s}\)was varied progressively from − 50° to 50°. Additionally, the case with the spare tail stowed was considered for comparative analysis.

Case.3 The contour map of the tailplane system under the normal mode.

Case.4 The pressure contour map of the tailplane system under the emergency mode.

Case.4 The velocity streamlines of the tailplane system under the emergency mode.
As shown in Fig. 14, when the spare tail is stowed, the stagnation point on the horizontal tail is located near its upper surface leading edge. The velocity distribution is relatively smooth, indicating that the gas flows over the horizontal tail surface at a fairly uniform speed, with well-organized streamlines, signifying stable flow. The pressure acting on the lower surface of the horizontal tail is less than that on its upper surface, resulting in an overall negative lift. The moment generated causes the aircraft to pitch up, leading to a nose-up pitching moment at the aircraft’s nose, forcing the aircraft into a climbing attitude.
As shown in Fig. 15 (a), when the spare tail is deployed and its angle of attack is −30°, the pressure on the upper surface of the spare tail is greater than that on its lower surface. The reason for this phenomenon, illustrated in Fig. 16 (a), is the appearance of a backflow vortex and a secondary induced vortex near the leading edge of the spare tail’s lower surface. A strong adverse pressure gradient intensifies the rotational speed of these two vortices. This is accompanied by boundary layer separation from the spare tail’s lower surface, creating a separated flow region near its lower surface. The flow separation is significant, and the resulting separated flow region causes a decrease in pressure on the lower surface. As the tail system transitions from the normal mode to the emergency mode, due to the coupled interaction of the dual tail surfaces, the negative pressure on the lower surface of the horizontal tail and the pressure on its upper surface both increase. However, the change in the stagnation point location on the horizontal tail is not significant.
Comparing Fig. 15 (b) and Fig. 15 (c), as the angle of attack\({\alpha _s}\)of the spare tail gradually increases from negative to positive values, the pressure on its lower surface escalates, while the pressure on its upper surface drops. The underlying cause of this behavior is explained by Fig. 16 (b) and Fig. 16 (c). At large negative angle of attack, the backflow vortices and secondary induced vortices on the lower surface of the spare tail wing cause severe flow separation, leading to a sharp reduction in lift. As the angle of attack\({\alpha _s}\)of the spare tail wing gradually increases to positive values, the intensity of the backflow vortices and secondary induced vortices on its lower surface diminishes. This results in a rearward shift of the separation point and a significant reduction in the degree of airflow detachment, ultimately leading to an increase in the pressure on the lower surface of the spare tail wing. When the angle of attack of the spare tail wing exceeds a specific threshold, the airflow detachment point on its upper surface advances, triggering the development of a backflow vortex. With further increases in positive angle of attack, a counter-rotating secondary induced vortex emerges. The interaction between these two vortices expands the separated flow region, preventing the flow from remaining attached to the spare tail’s upper surface and thereby inducing flow separation. This process further reduces the air pressure on the upper surface of the spare tail, affecting overall aerodynamic performance. Simultaneously, due to the downwash effect, the stagnation point on the spare tail moves from its upper surface, towards the leading edge, and onto its lower surface.
Due to the coupled interaction of the dual tail surfaces, as the angle of attack of the spare tail increases, the streamlines behind the spare tail become extremely disturbed. These disturbed streamlines directly affect the horizontal tail, especially near its trailing edge, forming vortices and turbulent regions. However, the change in the stagnation point location on the horizontal tail is not significant. At small positive angles of attack of the spare tail, the pressure on the lower surface of the horizontal tail is less than that on its upper surface, and the pressure difference between them is relatively small. At large positive angles of attack, the lower surface of the horizontal tail experiences negative pressure, while the upper surface experiences positive pressure. The pressure difference between them becomes larger, and the effectiveness of suppressing the aircraft’s uncontrolled climb tends to diminish.
Dynamics analysis of the tailplane system of a small aircraft
The elevator is jammed with a 15° downward Deflection
With the backup tail deployed, an assessment is made to determine if the aircraft’s nosedive tendency, under the influence of the spare tail, is mitigated or eliminated. Furthermore, the combined pitching moment of the dual-tail system is calculated. For this moment calculation, both the primary horizontal tail and the spare tail are assumed to have a span of 1 m.

Case.2 The moment of the spare tail wing and the resultant moment of the twin-tail configuration.

Case.2 Lift and drag coefficients of the tailplane system under different modes.
As shown in Fig. 17, when the angle of attack\({\alpha _s}\)of the spare tail wing is −50°, the moment at the backup tail is negative. When the angle of attack\({\alpha _s}\)gradually transitions from negative to positive values, the moment at the spare tail transitions from a negative value to a positive value. During this transition, when the angle of attack\({\alpha _s}\)reaches −29.9°, the combined torque of the dual-tail system is the torque that the tail system should produce to balance gravity. At this time, the aircraft no longer dives out of control and is in a balanced state. When the angle of attack\({\alpha _s}\)of the spare tail wing is further deflected negatively from −29.9°, The increase in the negative value of the combined moment of the dual tailplanes disrupts the aircraft’s state of equilibrium, causing the aircraft to transition from a nose-down dive to a nose-up climb, thus restoring controllability.
Figure 18, as an indirect illustration. It can be observed that in the normal mode of the tail system, the lift and drag coefficients of the tail system reflect the aircraft’s nosedive condition. Conversely, when the tail system transitions to the emergency mode, and the spare tail is at a large negative angle of attack, the overall tail system’s lift coefficient is negative, and its drag coefficient is positive. This indicates that the lift direction of the aircraft’s tail assembly is downwards, causing the aircraft to pitch up and climb.
The elevator is jammed with a 30° upward Deflection
With the spare tail deployed, an assessment is made to determine if the aircraft’s pitch-up and climb (loss-of-control) tendency, under the influence of the spare tail, is mitigated or eliminated. Furthermore, the combined pitching moment of the dual-tail system is calculated. For this moment calculation, both the primary horizontal tail and the spare tail are assumed to have a span of 1 m.

Case.4 The moment of the spare tail wing and the resultant moment of the twin-tail configuration.

Case.4 Lift and drag coefficients of the tailplane system under different modes.
As shown in Fig. 19, as the angle of attack\({\alpha _s}\)of the spare tail wing gradually increases from negative to positive values, the moment generated by the spare tail transitions from a negative value to a positive value, the difference between the combined moment of the twin-tail configuration and the moment that the tailplane system should generate to balance the gravity first decreases and then increases. This mitigates the aircraft’s climb tendency and alleviates the loss-of-control situation. However, the moment generated by the spare tail cannot bring the total tail system moment to the required trim value. Therefore, in this scenario, deploying the backup tail does not render the aircraft fully controllable.
Figure 20, as an indirect illustration, shows that under the normal mode of the tailplane, the lift and drag coefficients of the tailplane system indicate that the aircraft is climbing with a nose-up attitude. However, when the tailplane transitions to the emergency mode, the lift coefficients of the tailplane system become entirely negative, while the drag coefficients are entirely positive. This indicates that the lift direction of the tailplane is downward, yet the aircraft continues to climb with a nose-up attitude.
The typical structure of the tailplane of a large aircraft
The typical tail structure for controlling the pitch motion of large aircraft consists of a trimmable horizontal stabilizer (THS) and an elevator. This subsection analyzes the characteristic flow features of the tail system during elevator jamming scenarios and investigates the corresponding dynamic behavior.
Analysis of the typical flow characteristics of the tailplane system of a large aircraft
The trimmable horizontal stabilizer is jammed with a clockwise Deflection of 20°
When the Trimmable Horizontal Stabilizer (THS) jams at a 20° clockwise deflection, the aircraft will enter a nosedive. In this situation, the pilot pulls the control column back, deflecting the elevator to its maximum upward angle to mitigate the nosedive tendency. This section provides a comparative analysis of the flow characteristics for scenarios with the spare tail in both stowed and deployed configurations under these conditions.
To systematically analyze the flow features around the tail assembly, dynamic mesh techniques were employed. Simulations were conducted for the aircraft at a 0° angle of attack, with the THS jammed at a 20° clockwise deflection and the elevator deflected 30° upwards. In these simulations, the spare tail was deployed, and its angle of attack\({\alpha _s}\)was varied progressively from 20° down to −11°. Additionally, the case with the spare tail stowed was considered for comparative analysis.

Case.5 The contour map of the tailplane system under the normal mode.

Case.6 The pressure contour map of the tailplane system under the emergency mode.

Case.6 The velocity streamlines of the tailplane system under the emergency mode.

Case.6 Mach number contours of the tailplane system under emergency mode.
As shown in Fig. 21, when the spare tail is stowed, the stagnation point on the horizontal tail is located near its lower surface leading edge. A clockwise-rotating backflow vortex appears on its upper surface, with a counter-rotating secondary induced vortex below it. Consequently, the pressure acting on the lower surface of the horizontal tail is greater than that on its upper surface, resulting in an overall positive lift. The moment generated causes the aircraft to pitch down, leading to a nose-down pitching moment at the aircraft’s nose, forcing the aircraft into a nosedive.
As shown in Fig. 22 (a) and Fig. 23 (a), when the spare tail is deployed and its angle of attack\({\alpha _s}\)is 20°, a pressure differential forms across the upper and lower surfaces of the spare tail. A backflow vortex and a secondary induced vortex appear on the upper surface of the spare tail. Accompanied by a strong adverse pressure gradient, the rotational speed of the backflow vortex is further intensified, causing the boundary layer to detach from its upper surface. This flow instability leads to a significant flow separation zone near the upper surface of the spare tail, and the intensified flow separation effect causes a notable decrease in pressure on its upper surface. As the tail system transitions from the normal mode to the emergency mode, the forces acting on the primary horizontal tail change minimally, and its stagnation point location does not shift significantly. Therefore, the coupled interaction between the dual tail surfaces is weak and can be considered negligible.
By comparing Fig. 22 (a), Fig. 22 (b), Fig. 22 (c), Fig. 24 (a), Fig. 24 (b) and Fig. 24 (c), as the angle of attack\({\alpha _s}\)of the spare tail slowly decreases from positive to negative values, the pressure on the lower surface of the spare tail decreases, while the pressure on its upper surface increases. In the emergency mode, the forces acting on the primary horizontal tail change minimally, indicating weak coupling between the dual tail surfaces. Furthermore, the Mach number (Ma) near the leading edge of the spare tail’s lower surface exceeds 1. A shock wave appears and moves towards the trailing edge, causing a reduction in the lift coefficient. As shown in Fig. 23 (b) and Fig. 23 (c), the reason behind this is that as the angle of attack\({\alpha _s}\)of the spare tail decreases from positive to negative, the upward wash from the flow causes the resultant airflow velocity vector to shift upward. As a result, the stagnation point of the spare tail transitions from the front edge of the inferior surface to the front edge of the superior surface. During this process, the airflow detachment point on the upper surface of the spare tail moves rearward, and the strength of the backflow vortex and secondary induced vortex decreases. This allows the airflow on the upper surface to reattach, reducing the severity of airflow detachment. Consequently, the pressure on the superior surface of the spare tail progressively escalates, while the negative pressure on the inferior surface amplifies.
The trimmable horizontal stabilizer is jammed with a Counterclockwise Deflection of 20°
When the Trimmable Horizontal Stabilizer (THS) jams at a 20° counter-clockwise deflection, the aircraft will pitch up and climb. In this situation, the pilot pushes the control column forward, deflecting the elevator to its maximum downward angle to mitigate the climb tendency. This section provides a comparative analysis of the flow characteristics for scenarios with the spare tail in both stowed and deployed configurations under these conditions.
To systematically analyze the flow features around the tail assembly, dynamic mesh techniques were employed. Simulations were conducted for the aircraft at a 0° angle of attack, with the THS jammed at a 20° counter-clockwise deflection and the primary elevator deflected 15° downwards. In these simulations, the spare tail was deployed, and its angle of attack\({\alpha _s}\)was varied progressively from − 20° to 20°. Additionally, the case with the spare tail stowed was considered for comparative analysis.

Case.7 The contour map of the tailplane system under the normal mode.

Case.8 The pressure contour map of the tailplane system under the emergency mode.

Case.8 The velocity streamlines of the tailplane system under the emergency mode.
As shown in Fig. 25, when the spare tail is stowed, the stagnation point on the horizontal tail is located near its upper surface leading edge. A counter-clockwise rotating backflow vortex appears on its lower surface, with a secondary induced vortex rotating in the opposite direction above it. Consequently, the pressure acting on the lower surface of the horizontal tail is less than that on its upper surface, resulting in an overall negative lift. The moment generated causes the aircraft to pitch up, leading to a nose-up pitching moment at the aircraft’s nose, forcing the aircraft into a climbing attitude.
As shown in Fig. 26 (a) and Fig. 27 (a), when the spare tail is deployed and its angle of attack\({\alpha _s}\)is − 20°, the airflow velocity over the upper surface of the spare tail decreases, and the pressure increases. On the lower surface of the spare tail, the presence of an adverse pressure gradient causes the airflow to decelerate and undergo local flow separation, which in turn induces the formation of a backflow vortex and a secondary induced vortex. The formation of this backflow vortex not only intensifies the unsteadiness of the airflow but also, through complex vortex interactions, causes the pressure on the lower surface of the spare tail to decrease, leading to a pressure differential across its upper and lower surfaces. As the tail system transitions from the normal mode to the emergency mode, due to the coupled interaction of the dual tail surfaces, the pressure on the upper surface of the primary horizontal tail decreases, while the change in pressure on its lower surface is small; however. The change in its stagnation point location is not significant.
Comparing Fig. 26 (b) and Fig. 26 (c), as the angle of attack\({\alpha _s}\)of the spare tail slowly increases from negative to positive values, the stress on its lower surface escalates, while the stress on the top surface diminishes. The reasons for this can be seen in Fig. 27 (b) and Fig. 27 (c). As the angle of attack\({\alpha _s}\)of the spare tail wing increases from − 20° to −0.94°, the vorticity of the backflow and secondary induced vortices on its lower surface gradually decreases, causing the separation point to move downstream. The airflow reattaches to its lower surface, significantly reducing the extent of airflow detachment, which leads to an increase in pressure on its lower surface. As the angle of attack continues to increase to positive values, the split point on the top surface of the spare tail wing advances, and the separated flow region expands. This creates a clockwise rotating backflow vortex, accompanied by an increase in its vorticity, resulting in a reduction of stress on its superior surface. This results in a larger pressure differential between the superior and inferior surfaces of the spare tail wing.
Due to the coupled interaction of the dual tail surfaces, as the angle of attack of the spare tail increases, the change in the stagnation point location on the primary horizontal tail is not significant. The pressure on the upper surface of the primary horizontal tail continues to increase, while the change in pressure on its lower surface is not significant. However, the pressure on the lower surface of the spare tail increases more rapidly, resulting in a net upward force for the overall tail system.
Dynamic analysis of the tailplane system of a large aircraft
The trimmable horizontal stabilizer is jammed with a clockwise Deflection of 20°
With the spare tail deployed, an assessment is made to determine if the aircraft’s nosedive phenomenon, under the influence of the spare tail, is mitigated or eliminated. Furthermore, the combined pitching moment of the dual-tail system is calculated. For this moment calculation, both the primary horizontal tail and the spare tail are assumed to have a span of 1 m.

Case.6 The moment of the spare tail wing and the resultant moment of the twin-tail configuration.

Case.6 Lift and drag coefficients of the tailplane system under different modes.
As shown in Fig. 28, when the spare tail is deployed and its angle of attack\({\alpha _s}\)is 20°, the pressure differential across its upper and lower surfaces results in a positive moment at the spare tail. As the angle of attack of the spare tail gradually decreases, the moment at the spare tail transitions from positive to negative. During this process, when the angle of attack of the spare tail reaches −10.45°, the combined pitching moment of the dual-tail system is the moment that the tail system should produce to balance gravity, and the aircraft is in an equilibrium state. When the spare tail wing continues to deflect downward from the −10.45° angle of attack, the negative value of the combined moment of the dual tailplanes increases, disrupting the aircraft’s equilibrium. As a result, the aircraft transitions from a nose-down dive to a nose-up climb, and the aircraft becomes controllable.
Figure 29, as an indirect illustration, demonstrates that under the normal mode of the tailplane, the lift coefficient of the tailplane system is positive, and the drag coefficient remains relatively low, with the lift direction pointing upward, causing the aircraft to enter a nose-down dive. However, when the tailplane transitions to the emergency mode and the spare tail assumes a large negative angle of attack, the lift coefficient of the tailplane system shifts from positive to negative, and the drag coefficient increases significantly. This indicates that the aerodynamic forces generated by the tailplane are directed downward, resulting in a tendency for the aircraft to pitch upward and climb.
The trimmable horizontal stabilizer is jammed with a Counterclockwise Deflection of 20°
With the spare tail deployed, an assessment is made to determine if the aircraft’s pitch-up and climb phenomenon, under the influence of the spare tail, is mitigated or eliminated. Furthermore, the combined pitching moment of the dual-tail system is calculated. For this moment calculation, both the primary horizontal tail and the spare tail are assumed to have a span of 1 m.

Case.8 The moment of the spare tail wing and the resultant moment of the twin-tail configuration.

Case.8 Lift and drag coefficients of the tailplane system under different modes.
As shown in Fig. 30, when the spare tail is deployed and its angle of attack\({\alpha _s}\)is −20°, the spare tail generates a negative moment. As the angle of attack of the spare tail gradually increases from negative to positive, the moment at the spare tail transitions from negative to positive. During this transition, when the angle of attack of the spare tail reaches −0.94°, the combined torque generated by the two tailplanes corresponds to the torque that the tail system should produce to balance gravitational forces, thereby maintaining the aircraft in a state of equilibrium. Once the angle of attack of the spare tail wing exceeds −0.94°, the negative value of the combined moment of the dual tailplanes decreases, disrupting the aircraft’s equilibrium. As a result, the aircraft’s attitude shifts from climbing to descending, and the aircraft remains controllable.
Figure 31, as an indirect illustration, shows that under the normal mode of the tailplane, the lift coefficient of the tailplane system is negative, and the drag coefficient is relatively high, with the lift direction pointing downward, causing the aircraft to pitch up and climb. When the tailplane transitions to the emergency mode and the auxiliary tailplane operates near a 0° angle of attack, the lift coefficient of the tailplane system shifts from negative to positive, and the drag coefficient remains positive but slightly higher than the lift coefficient. This indicates that the tailplane system is in a low-efficiency, high-drag state. As the angle of attack of the auxiliary tailplane increases further, the lift coefficient of the tailplane system increases, and the gap between the lift and drag coefficients decreases. This suggests that the positive lift generated by the tailplane system increases, and the resulting force moment gradually shifts upward, causing the aircraft to develop a nose-down tendency.
Effect of the backup tail on aircraft stability
Adding a spare tail to the aircraft’s empennage leads to an increase in the aircraft’s tail weight. The sources of this additional weight are primarily from the following aspects:
(1) The spare tail might be manufactured using different materials to ensure its effective operation, thus increasing its weight compared to a conventional tail.
(2) To prevent the spare tail from being damaged by high-speed airflow during flight, the structural strength of the attachment points at the tail root needs to be enhanced, ensuring the spare tail can withstand in-flight pressures.
(3) Activation of the spare tail requires additional control systems, such as hydraulic systems, electronic control systems, or sensors, the inclusion of which adds a certain amount of weight.
An increase in aircraft weight will cause a shift in the aircraft’s center of gravity (CG). The following section calculates the aircraft’s CG position after the addition of the spare tail.
The formula for calculating the overall aircraft center of gravity is as follows:
where\({m_i}\)is the weight of each aircraft component (e.g., fuselage, tail), \({x_i}\)is the center of gravity of each aircraft component, and\(\sum {{m_i}}\)is the total aircraft weight.
For this study, the aircraft is scaled down. The horizontal tail chord length is 0.225 m, the horizontal tail is installed at a position 1.95 m from the aircraft nose, and the total aircraft length is 2.25 m. Assume that before the tail modification, the total aircraft weight is 40,000 kg, of which the tail weighs 3,000 kg47. After modification, the tail weight is 5% heavier than before, meaning the total aircraft weight after modification is 40,150 kg, and the modified tail weighs 3,150 kg. Further assume that the center of gravity of the modified tail is located at 30% of its mean aerodynamic chord, denoted as\({X_{1 - tailCG}}=2.0175m\). And the overall aircraft center of gravity after tail modification is 1.03 m forward of the horizontal tail’s installation point, denoted as\({X_{1 - aircraftCG}}=0.92m\). From this, the center of gravity of the other aircraft parts (excluding the tail), \({X_{1 - otherCG}}=0.8495m\), can be calculated. To simplify the calculation, it is assumed that\({X_{1 - otherCG}}\)and\({X_{1 - tailCG}}\)remain unchanged, and the overall center of gravity of the aircraft, denoted as\({X_{2 - aircraftCG}}=0.916m\), is calculated after the modification of the tailplane. Refer to Table 2 for details. It is evident that\({X_{1 - aircraftCG}}>{X_{2 - aircraftCG}}\), indicating that after the tail modification, the overall aircraft center of gravity shifts aft. This reduces the aircraft’s longitudinal stability and enhances its maneuverability, potentially enabling the pilot to better control the aircraft out of a loss-of-control situation.
Conclusion
This study proposes an emergency strategy for instances of aircraft tail control surface malfunctions. Furthermore, the design incorporating the spare tail does not impede the normal operation of the primary tail assembly. The presence of the spare tail is anticipated to greatly enhance the coordinated functionality between the horizontal and vertical tail surfaces, thereby aiming to bolster aircraft operational safety. This approach offers pilots a viable solution to recover from loss-of-control situations in the event of primary tail control system failure.
To verify the feasibility of the design, this study utilizes ANSYS ICEM to perform mesh generation on the established model, and employs dynamic mesh techniques in ANSYS FLUENT to conduct transient numerical simulations of the horizontal tailplane and elevator jam conditions, as well as the deployment of the spare tail, for both large and small aircraft. The transient characteristics of the aircraft’s tailplane section are analyzed. The following conclusions are drawn from the study.
(1) When the elevator of a small aircraft’s horizontal tail or the Trimmable Horizontal Stabilizer (THS) of a large aircraft experiences a jamming malfunction, deploying the backup tail and deflecting it to an appropriate angle of attack can make the combined pitching moment of the entire tail system equal to the moment required to balance gravity, thereby ensuring aircraft equilibrium. Specifically: Case 2:\({\alpha _s}\)= −29.9°, Case 6:\({\alpha _s}\)= −10.45°, and Case 8:\({\alpha _s}\)= −0.94°.
(2) When the spare tail is deflected to a specific angle, it can provide the tail system with ample compensatory moment to control the aircraft’s pitch attitude change, thereby rendering the out-of-control aircraft controllable. Specifically:
Case 2
\({\alpha _s}\)<−29.9°, the aircraft’s nosedive tendency is mitigated, and it gradually transitions to a pitch-up climb.
Case 6
\({\alpha _s}\)<−10.45°, the aircraft’s nosedive tendency is mitigated, and it gradually transitions to a pitch-up climb.
Case 8
\({\alpha _s}\)>−0.94°, the aircraft’s uncontrolled climb tendency is mitigated, and it gradually transitions to a nose-down descent.
(3) When the aircraft tail system transitions from the normal mode to the emergency mode and the spare tail deploys, the aerodynamic coupling between the dual tail surfaces influences the overall tail moment. However, the spare tail generates a sufficiently large moment that dominates the overall aerodynamic effect, thereby diminishing the impact of this coupling.
Data availability
The datasets generated during the current study are available from the corresponding author on reasonable request.
References
Jiao, Y. et al. Classification and causes identification of Chinese civil aviation incident Reports[J]. Appl. Sciences-Basel. 12 (21). https://doi.org/10.3390/app122110765 (2022).
Z M, M. V. G. A. Victim fragmentation patterns and seat location supplements crash data: American airlines flight 587. [J]. Aviation, space, and environmental medicine, 83(4): 412–417 (2012). https://doi.org/10.3357/asem.3155.2012
Mark, H. Carolyn, et al. Challenges of Measuring Performance for FAA’s Safety Oversight System[J], 2018.https://doi.org/10.1177/0361198105193700105
Cao, Y. H., Tan, W. Y. & Wu, Z. L. Aircraft icing: an ongoing threat to aviation safety[J]. Aerosp. Sci. Technol. 75, 353–385. https://doi.org/10.1016/j.ast.2017.12.028 (2018).
Bajpai, G. & Chang, B-C. Control of longitudinal dynamics of the aircraft with elevator failure[C]. 20th Digital Avionics Systems Conference. 9A4/1-9A4/6. https://doi.org/10.1109/DASC.2001.96426 (2001).
Syed, S. et al. Adaptive Flight Control of an Aircraft with Actuator Faults[C]. International Conference on Robotics and Emerging Allied Technologies in Engineering (iCREATE), : 249–254 (2014).
Wang, X. J. et al. Active fault-tolerant control strategy of large civil aircraft under elevator failures[J]. Chin. J. Aeronaut. 28 (6), 1658–1666. https://doi.org/10.1016/j.cja.2015.10.001 (2015).
Chang, B. C. et al. Flight Path and Altitude Tracking Control Of An Impaired Nonlinear Generic Transport Model (GTM) Aircraft With Elevator Jam Failures[C]. IEEE Conference on Control Applications (CCA), : (2016).
Gaur, D. & Tengli, D. Structural Analysis and Optimization of Aircraft Rudder[J], (2018). https://doi.org/10.15680/IJIRSET.2018.0706101
Aslan, S. et al. Percentile-Based adaptive immune plasma algorithm and its application to engineering Optimization[J]. Biomimetics 8, 486. https://doi.org/10.3390/biomimetics8060486 (2023).
Arik, S., Turkmen, I. & Oktay, T. Redesign of morphing UAV for simultaneous improvement of directional stability and maximum lift/drag Ratio[J]. Adv. Electr. Comput. Eng. 18, 57–62. https://doi.org/10.4316/AECE.2018.04007 (2018).
Oktay, T. et al. Neural network based redesign of morphing UAV for simultaneous improvement of roll stability and maximum lift/drag ratio[J]. Aircr. Eng. Aerosp. Technol. 90. https://doi.org/10.1108/AEAT-06-2017-0157 (2018).
Uzun, M. & Oktay, T. Simultaneous UAV having actively sweep angle morphing wing and flight control system design[J]. Aircr. Eng. Aerosp. Technol. 95, 1062–1068. https://doi.org/10.1108/AEAT-09-2022-0259 (2023).
Oktay, T. & Coban, S. Lateral Autonomous Performance Maximization of Tactical Unmanned Aerial Vehicles by Integrated Passive and Active Morphing[J]. International Journal of Advanced Research in Engineering (ISSN Online: 2412–4362), 2017, 3: 1.https://doi.org/10.24178/ijare.2017.3.1.01
Aslan, S. & Oktay, T. Path planning of an unmanned combat aerial vehicle with an Extended-Treatment-Approach-Based immune plasma Algorithm[J]. Aerospace 10, 487. https://doi.org/10.3390/aerospace10050487 (2023).
Şahin, H. Multi-objective stochastical revision of piston-prop MUAV for maximization of autonomous performance, range, endurance and ceiling altitude[J]0(0): https://doi.org/10.1177/09544100251332842
Köse, O., Oktay, T. & SPSA[J]. Simultaneous design of morphing hexarotor and autopilot system by using deep neural network and. Aircraft Engineering and Aerospace Technology, 95: 939–949. (2023). https://doi.org/10.1108/AEAT-07-2022-0178
Oktay, T. & Köse, O. Hexarotor longitudinal flight control with deep neural network, PID algorithm and Morphing[J]. Eur. J. Sci. Technol. https://doi.org/10.31590/ejosat.946884 (2021).
Yesilbas, E. et al. Simultaneous and stochastic design of piston-prop TUAV vertical tail and its autonomous system[J]. Aircr. Eng. Aerosp. Technol. 97, 395–404. https://doi.org/10.1108/AEAT-11-2024-0311 (2025).
Fale, R., Mathur, M. & Govindarajan, B. Enhanced aerodynamic performance of a Two-Dimensional airfoil using moving Boundaries[J]. AIAA J. 62 (6), 2235–2247. https://doi.org/10.2514/1.J063561 (2024).
Sal, F. Effects of the actively morphing root chord and taper on helicopter energy[J]. Aircr. Eng. Aerosp. Technol. 92 (2), 264–270. https://doi.org/10.1108/AEAT-08-2019-0165 (2020).
Oktay, T., Sal, F. & BLADE TAPER EFFECT ON CONTROL EFFORT AND PUMA SA 330 APPLICATION ON SIMULATION ENVIRONMENT[M]. (2016).
Oktay, T. & Sal, F. Effect of Combined Blade Root Chord Length and Blade Taper (on Manned Helicopter Control Effort[M], 2017).
Torregrosa, J. R. et al. Mathematical modeling and numerical simulation in sciences and engineering[J]. Mathematical Methods in the Applied Sciences, (2024). https://doi.org/10.1002/mma.10308
Eftekhari, S. & Al-Obaidi, A. S. Investigation of a NACA0012 finite wing aerodynamics at low reynold’s numbers and 0º to 90º angle of Attack[J]. J. Aerosp. Technol. Manage. https://doi.org/10.5028/jatm.v11.1023 (2019).
Pelletier, D. Verification, validation, and uncertainty in computational fluids dynamic[J]. Can. J. Civ. Eng. 37 (7), 1003–1013. https://doi.org/10.1139/l10-032 (2010).
Schütz, D. I. Progress in CFD validation in aerodynamics Development[J]. ATZautotechnology https://doi.org/10.1365/s35595-011-0036-1 (2011). 11.
Eça, L. et al. On the characterization of grid density in grid refinement studies for discretization error estimation[J]. Int. J. Numer. Methods Fluids. 72 (1), 119–134. https://doi.org/10.1002/fld.3737 (2013).
Administration C I P. A method for adjusting the jamming of aircraft tail fins and elevators. China, CN202310237572.0[P]. (Apr 11, 2023).
Sun, X. J. et al. Experimental study of aerodynamic characteristics of partially flexible NACA0012 Airfoil[J]. Aiaa J. 60 (9), 5386–5400. https://doi.org/10.2514/1.J061803 (2022).
Sharma, D. & Goyal, R. Numerical Simulation and Validation of NACA0012 Airfoil to Predict Its Performance During the Stalling Condition[M]. (2024).
Yadav, A. et al. Experimental Investigations on Aerodynamic Performances of NACA0012 Airfoil[C]. International Conference on Intelligent Controller and Computing for Smart Power (ICICCSP), 2022: 1–5. (2022). https://doi.org/10.1109/ICICCSP53532.2022.9862440
Ahmad, M., Li, B. Y. & Ieee A Comparative Analysis of Turbulence Models in FLUENT for High-Lift Airfoils at Low Reynolds Number[C]. International Conference on Unmanned Aircraft Systems (ICUAS), : 779–786. (2022). https://doi.org/10.1109/ICUAS54217.2022.9836229
Kostic, C. Review of the Spalart-Allmaras turbulence model and its modifications to three-dimensional supersonic configurations[J]. Sci. Tech. Rev. 65, 43–49. https://doi.org/10.5937/STR1501043K (2015).
Bourgoin, A. et al. An adoption of the Spalart-Allmaras turbulence model for two- and three-dimensional free surface environmental flows[J]. J. Hydraul. Res. 59 (2), 314–328. https://doi.org/10.1080/00221686.2020.1780490 (2021).
Jithin, P. N., Arumugham-Achari, A. K. & Asme SHAPE OPTIMISATION OF NACA4412 IN GROUND EFFECT- SELECTION OF A TURBULENCE MODEL[C] (ASME-Fluids-Engineering-Division Summer Meeting (FEDSM), 2021).
ANSYS Inc. Fluent Theory Guide. Available online: December (2024). https://ansyshelp.ansys.com/account/secured?returnurl=/Views/Secured/corp/v241/en/flu_th/flu_th.html (accessed on 10.
He, X., Zhang, L. & Chang, X. Research and development of structured/unstructured hybrid CFD software[J]. Trans. Nanjing Univ. Aeronaut. Astronaut. 30, 116–120 (2013).
ANSYS Inc.Dynamic Mesh. Available online:[EB/OL]. https://ansyshelp.ansys.com/account/secured?returnurl=/Views/Secured/corp/v221/en/flu_ug/flu_ug_dynamic_mesh_task_page.html%23flu_ug_dynamic_mesh_task_page
ANSYS Inc. Modeling Flows Using Sliding and Dynamic Meshes.Available online:[EB/OL]. https://ansyshelp.ansys.com/account/secured?returnurl=/Views/Secured/corp/v221/en/flu_ug/flu_ug_sec_dynamic_intro.html
Roache, P. J. Verification of codes and Calculations[J]. AIAA J. 36 (5), 696–702. https://doi.org/10.2514/2.457 (1998).
Oliveira, R. F., Justi, G. H., Lopes, G. C., GRID CONVERGENCE STUDY OF A CYCLONE SEPARATOR & USING DIFFERENT MESH STRUCTURES[J]. Chem. Ind. Chem. Eng. Q., 23(3): 311–320. https://doi.org/10.2298/ciceq160516044o (2017).
Rak, A. et al. Experimental and LBM analysis of medium-Reynolds number fluid flow around NACA0012 airfoil[J]. Int. J. Numer. Methods Heat. Fluid Flow. 33, 1955–1980. https://doi.org/10.1108/HFF-06-2022-0389 (2023).
Voloshin, V., Chen, Y. & Calay, R. A comparison of turbulence models in airship steady-state CFD simulations[J], (2012).
Hassan, T. et al. 180-Evaluation of different turbulence models at low Reynolds number for the flow over symmetric and cambered Airfoils[J]. J. Eng. Advancements. 3, 12–22. https://doi.org/10.38032/jea.2022.01.003 (2022).
Raymer, D. Aircraft Design: A Conceptual Approach, Sixth Edition[M]. (2018).
Airbus, A. & Specifications [EB/OL]. https://www.flugzeuginfo.net/acdata_php/acdata_a318_en.php
Funding
This research was funded by the Fundamental Research Funds for the Central Universities (25CAFUC04005), (25CAFUC09012) and (25CAFUC01001).
Author information
Authors and Affiliations
Contributions
D.Y. and Z.Z. wrote the main manuscript text; D.Y. and Z.Z.mainly used software; D.Y., Z.Z. and L.Y. mainly conducts validation; G.Z. and F.L. mainly conducts formal analysis; F.L. mainly conducts investigation; All authors have read and agreed to the published version of the manuscript.
Corresponding author
Ethics declarations
Competing interests
The authors declare no competing interests.
Additional information
Publisher’s note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Electronic supplementary material
Below is the link to the electronic supplementary material.
Supplementary Material 1
Supplementary Material 2
Supplementary Material 3
Supplementary Material 4
Rights and permissions
Open Access This article is licensed under a Creative Commons Attribution-NonCommercial-NoDerivatives 4.0 International License, which permits any non-commercial use, sharing, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons licence, and indicate if you modified the licensed material. You do not have permission under this licence to share adapted material derived from this article or parts of it. The images or other third party material in this article are included in the article’s Creative Commons licence, unless indicated otherwise in a credit line to the material. If material is not included in the article’s Creative Commons licence and your intended use is not permitted by statutory regulation or exceeds the permitted use, you will need to obtain permission directly from the copyright holder. To view a copy of this licence, visit http://creativecommons.org/licenses/by-nc-nd/4.0/.
About this article

Cite this article
Yan, D., Zhao, Z., Ye, L. et al. Aerodynamic simulation and control analysis of an aircraft emergency tailplane system. Sci Rep 15, 33968 (2025). https://doi.org/10.1038/s41598-025-10836-y
Received:
Accepted:
Published:
DOI: https://doi.org/10.1038/s41598-025-10836-y
