
Abstract
Landslides are one of the most common types of geological disasters. However, the waves generated by landslides often cause more severe damage than the landslides themselves. This paper proposes an improved numerical model for landslide-induced waves. The model’s governing equations are derived from the equilibrium of forces acting on columns and principles of fluid dynamics. It can rapidly and effectively simulate the entire process of landslide-induced wave generation. Moreover, the model improves computational efficiency through the use of fixed computational cells, particularly in mountainous regions. The model was validated using a case study by Fernández-Nieto and then applied to simulate the Huangtian landslide-induced waves in the XW reservoir, China. The simulated landslide deposit closely matches the digital surface model obtained from unmanned aerial vehicle surveys. Simulated results showed a maximum wave height of 40.85 m, a maximum run-up height on the opposite bank of 34.1 m, and a wave height of 3.75 m near the dam. The fixed computational cells, which accounted for approximately 22% of the total cells, led to a four-fold improvement in computational efficiency over a full grid approach. Even with the additional cost of the preliminary simulation, the overall method still achieved a 3.7-fold improvement in computational efficiency over a full grid approach.
Similar content being viewed by others

Introduction
Landslides are among the most common types of geological hazards1,2. However, the waves induced by landslides can be even more devastating than the landslides themselves3,4. In 1958, the Lituya Bay landslide in Alaska generated a wave with a height of 524 m5,6. In 1963, the Vajont Dam landslide in Italy produced a catastrophic surge that overtopped the dam, inundated downstream villages, and resulted in approximately 2,000 fatalities7,8. On September 30, 2018, an Mw 7.5 strike-slip earthquake struck Palu Bay, Indonesia, triggering landslides and a tsunami that caused about 4,340 deaths9,10. In recent years, other notable landslide-induced surge events, including the Baige landslide11, the Todos los Santos Lake landslide12, and the Anak Krakatau Island landslide13, have also caused significant casualties and financial losses. Consequently, the analysis of wave propagation remains crucial for disaster prevention and mitigation efforts.
Numerous numerical models have been developed to simulate landslide-induced waves events. These models can be broadly categorized into three groups: (1) Eulerian methods based on grids, including depth-averaged models that employ the finite difference method (FDM)14,15, finite element method (FEM)16, and finite volume method (FVM)17. For instance, Wang18 used Fluent to simulate landslide-generated waves in a flume, modeling the landslide as a rigid body. A significant limitation of this approach was its inability to account for landslide deformation. Furthermore, while Wang19, Hu11, and Chen17 employed FLOW-3D to respectively simulate landslide-generated waves from the RS landslide (RM reservoir), the Baige landslide (Jinsha River), and the Wangjiashan landslide (Baihetan reservoir), these valuable site-specific simulations were consistently limited to domains of 3–8 km in extent, potentially restricting their applicability for predicting far-field characteristics, such as wave height decay along the propagation path, wave travel time, and the maximum run-up on distant shores—critical parameters whose reliable prediction is essential for the development of safe and cost-effective preventive measures. (2) Lagrangian methods based on particles, such as smoothed particle hydrodynamics (SPH)20 and the material point method (MPM)21. These methods discretize both the fluid and the landslide into particles, effectively addressing fluid-soil interactions and large deformation problems. For example, Dai22 simulated the movement of the Baiyun landslide in the South China Sea using the SPH method, but the 50 m particle radius employed was too coarse for effectively modeling landslide-induced waves in reservoir. Currently, the MPM is primarily employed to investigate the dynamics of landslide-generated waves within 2D profiles. For instance, Zhao23 utilized the MPM to study landslide-generated waves in a flume cross-section, and further examined the influence of various slide material parameters on the resulting impulse waves. (3) The coupling methods of solid mechanics and hydrodynamics provide detailed characterizations of landslide motion and wave generation through various equations. Wang24 utilized an FDEM-SPH (finite-discrete element method- smoothed particle hydrodynamics) method to simulate a landslide-generated wave case in the Three Gorges reservoir area, and Wu25 employed an MPM-SPH approach for the Wangjiashan landslide-induced wave event in the Baihetan reservoir area. However, a critical issue in these studies was that the landslide motion was firstly computed and then used as an initial condition for the subsequent wave simulation. This one-way coupling methodology inherently neglects the mutual interaction between the slide material and the water body.
Despite these advancements, several problems persist in the current research landscape for simulating landslide-induced waves. These include (i) simplifications such as the rigid body assumption, (ii) the substantial computational cost entailed by modeling landslide-induced waves in 3D, which limits the feasible computational domain, impacting far-field predictions, and (iii) the one-way coupling approaches that do not fully capture the dynamic interplay between the landslide and the water.
Addressing the need for computationally rapid simulations of large-scale engineering scenarios within acceptable error tolerances, this paper presents a coupled modelling approach. It integrates LS-Rapid26,27,28, a model for landslide motion, with COMCOT29,30, a model for tsunami simulation, both of which are based on Shallow Water Equations. The interaction between the landslide mass and the water body is represented by the drag force31,32, enabling the coupled model to simulate the complete landslide disaster chain, encompassing “Motion→ Wave induction→ Wave propagation”. The paper is structured as follows: Sect. 2 introduces an improved numerical model for simulating landslide-induced waves and details its validation tests. Section 3 applies this model to the Huangtian landslide in the XW reservoir, China, describing the engineering geological characteristics of the landslide and the setup for numerical simulation. Section 4 presents the numerical results of the Huangtian landslide-induced waves. Section 5 evaluates the model’s effectiveness in simulating the Huangtian landslide-induced wave events, discusses its computational efficiency, and outlines potential directions for future research. Finally, Sect. 6 summarizes the key findings.
Methodology
Description of the model
The model is conceptualized as a three-layer structure, comprising a fixed sliding surface, a movable sliding mass, and an overlying water body (Fig. 1a). The model employs a Cartesian coordinate system and is discretized into a series of vertical columns oriented perpendicular to the XOY plane, which include both soil and water columns. As shown in Fig. 1b, the forces acting on each soil column consist of gravity (\({G_2}\)), lateral pressure (\({P_2}\)), frictional resistance (\({S_2}\)), support force (\({N_2}\)), buoyancy (B), and the drag force (\({D_2}\)) exerted by the water. Similarly, the forces acting on each water column include gravity (\({G_1}\)), lateral pressure (\({P_1}\)), frictional resistance (\({S_1}\)), support force (\({N_1}\)), and drag force (\({D_1}\)).

Model schematic and force analysis. (a) Schematic diagram of the model; (b) Force analysis on the soil and water columns. The forces acting on the columns include gravity (\({G_n}\)), support force (\({N_n}\)), frictional resistance (\({S_n}\)), lateral pressure (\({P_n}\)), and buoyancy (B). \(n=1\) and \(n=2\) represent the water body and sliding mass, respectively. \(\alpha\) and \(\beta\)represent the angles of the ground surface with respect to the XOZ plane and the YOZ plane, respectively. \(\Delta x\) and \(\Delta y\) denote the cell sizes in the x- and y-directions, respectively.
Governing equations
The governing equations of the model comprise one continuity equation and two momentum equations to describe landslide motion, as well as one continuity equation and two momentum equations to characterize wave propagation. These equations are derived based on the principles of fluid dynamics and the equilibrium of forces acting on the columns, as described by Sassa26. Therefore, the model is suited for simulating waves induced by flow slides33 in a static water environment. The detailed derivation process is presented in the following section.
Derivation of the continuity equations
The sliding mass and water body are assumed to be incompressible. Based on mass conservation within each column, the continuity equations for landslide motion and wave propagation are described by Eqs. (1) and (2), respectively.
Where \({h_2}\) represents the thickness of the sliding mass; \({Q_{2x}}={v_{2x}}{h_2}\) and \({Q_{2y}}={v_{2y}}{h_2}\); \({v_{2x}}\) and \({v_{2y}}\) denote the average velocities of the sliding mass in the x- and y-directions, respectively; \(\eta\)is the water surface elevation; \({Q_{1x}}={v_{1x}}{h_1}\) and \({Q_{1y}}={v_{1y}}{h_1}\); \({h_1}\) is the water depth; \({v_{1x}}\) and \({v_{1y}}\) represent the average velocities of the water body in the x- and y-directions, respectively; Z is the bed elevation.
Derivation of the momentum equations
The momentum equations for landslide motion and wave propagation are derived based on the conservation of momentum in the x- and y-directions. A detailed derivation for the x-direction is presented below, with the y-direction following a similar approach. The equilibrium equations for the sliding mass and the water body are given as Eqs. (3) and (4), respectively.
Where \({a_{1x}}\) and \({a_{2x}}\) are the acceleration of the water body and the sliding mass in the x-direction, respectively; \({m_1}={\rho _1}{h_1}\Delta x\Delta y\) and \({m_2}={\rho _2}{h_2}\Delta x\Delta y\); \({\rho _1}\) and \({\rho _2}\) represent the density of the water body and the sliding mass, respectively; \({P_{1x}}\) and \({P_{2x}}\) are the lateral pressures acting on the water column and the soil column in the x-direction, respectively; \({S_{1x}}\) and \({S_{2x}}\) the components of the frictional resistance acting on the water column and the soil column in the x-direction, respectively; \({D_{1x}}\) and \({D_{2x}}\) are the component of the drag forces acting on the water column and the soil column in the x-direction, respectively. Note that these forces act in opposite directions; \({N_{2x}}\) is the component of the support force acting on the soil column in the x-direction.
Suppose that the horizontal velocities along the column are identical34, then \({a_{1x}}\) and \({a_{2x}}\) can be written as
Landslide motion
The accelerations of the sliding mass induced by the support force, lateral pressure, and frictional resistance in the x-direction are detailed in Sassa26 and are represented by Eqs. (7), (8), and (9), respectively.
Where g is the gravitational acceleration; \(q={\tan ^2}\alpha +{\tan ^2}\beta\); \(k=1 - \sin {\phi _a}\); \({\phi _a}\) is the apparent friction angle of the sliding surface soil; c represent the cohesion of the sliding surface soil; \({D_x}=\frac{{{v_{2x}}}}{{\sqrt {v_{{2x}}^{2}+v_{{2y}}^{2}+v_{{2z}}^{2}} }}\), \({v_{2z}}={v_{2x}}\tan {\alpha _2}+{v_{2y}}\tan {\beta _2}\).
The drag force, generated by the friction between the water body and the sliding mass, can be described as a function31 of the relative velocity between the sliding mass and the water, the frontal area of the sliding mass, and the drag coefficient35,36. Specifically, the drag force \({D_2}\) can be written as
Where \({C_D}\) is the drag coefficient; \({v_1}\) and \({v_2}\) denote the average velocities of the water body and the sliding mass, respectively.
Therefore, the acceleration of the sliding mass in the x-direction, induced by the drag force \({D_2}\), can be expressed as
By substituting Eqs. (5), (7), (8), (9), and (11) into Eq. (3) and multiplying the result by \({h_2}\), the following momentum equation for landslide motion in the x-direction is obtained:
Similarly, the momentum equation for landslide motion in the y-direction can be expressed as follows:
Where \({D_y}=\frac{{{v_{2y}}}}{{\sqrt {v_{{2x}}^{2}+v_{{2y}}^{2}+v_{{2z}}^{2}} }}\).
Wave propagation
The accelerations of the water body induced by the lateral pressure and frictional resistance in the x-direction are detailed in Liu29,37 and are represented by Eqs. (14) and (15), respectively.
Where n is Manning’s roughness coefficient.
The drag forces are equal in magnitude and opposite in direction, resulting from the friction between the sliding mass and the water body. According to Newton’s third law of motion, the drag force \({D_1}\) can be expressed as
Therefore, the acceleration of the water body in the x-direction, induced by the drag force \({D_1}\), can be expressed as
By substituting Eqs. (6), (14), (15), and (17) into Eq. (4) and multiplying the result by \({h_1}\), the following momentum equation for wave propagation in the x-direction is obtained:
Similarly, the momentum equation for wave propagation in the y-direction can be expressed as follows:
Numerical scheme
The governing equations are discretized using the finite difference method and solved within rectangular cells27. Here, h denotes the thickness of the landslide and the water surface elevation at the center of a cell (i, j). The flow rates \({Q_x}\) and \({Q_y}\) are defined at the boundaries of each cell in the x- and y-directions, respectively (Fig. 2). Consequently, the continuity equations are solved within each cell, while the momentum equations are solved at the cell boundaries.

Schematic diagram of the discretized cells34.
The boundary conditions in this model adopt the open and moving boundaries employed in the COMCOT model30,38. To ensure model stability, the model limits fluid flow to adjacent cells within each time step. Consequently, the time step must satisfy the following condition.
Where \(\omega =5\), \({v_x}=\hbox{max} \left\{ {{v_{1x}},\left. {{v_{2x}}} \right\}} \right.\), \({v_y}=\hbox{max} \left\{ {{v_{1y}},\left. {{v_{2y}}} \right\}} \right.\).
Computational scheme
When simulating real-world landslide-induced wave disasters, the simulation domain is often extensive. Consequently, a large number of cells may remain empty and are unnecessary for computation. However, traditional computational schemes still include these empty cells in the calculations34,39, resulting in inefficient use of computational resources. Although the dynamic computational cell method proposed by Shen40 helps maintain model stability, its contribution to improving computational efficiency remains limited.
To enhance the computational efficiency of the model, this paper proposes conducting calculations exclusively within fixed computational cells (Fig. 3). These cells primarily cover the regions impacted by landslide-induced wave disasters, as depicted in Fig. 3. Empty cells are retained solely for spatial positioning purposes. By reducing the number of computational cells involved in the calculations, the model achieves a significant improvement in computational efficiency, especially in mountainous regions.
Prior studies indicate that the maximum wave heights occur near landslide sources41. Accordingly, preliminary simulations were conducted for the relevant area, maintaining the target grid resolution, to estimate the landslide’s area of movement and the maximum wave height. The fixed computational domain was subsequently defined: it encompassed the landslide movement area, expanded horizontally by several hundred meters, with its upper boundary set approximately 100 m above the highest simulated wave elevation. Because there is inherently no mass exchange across the boundaries of the fixed domain, the numerical accuracy is not compromised.

Schematic diagram of the fixed computational cells.
Solution procedure
The solution procedures for the model are outlined as follows.
-
1.
The predicted flow rates \({Q_{2x}}\) and \({Q_{2y}}\) of the landslide for the next time step are obtained using Eqs. (12) and (13).
-
2.
The predicted landslide thickness \({h_2}\) and bed elevation Z for the next time step are determined using Eq. (1).
-
3.
The predicted water surface elevation \(\eta\) and water depth \({h_1}\) for the next time step are computed using Eq. (2).
-
4.
The predicted flow rates \({Q_{1x}}\) and \({Q_{1y}}\) of the water for the next time step are determined using Eqs. (18) and (19).
-
5.
The above procedures are iteratively repeated until the entire computational process is completed.
Validation test
The model was developed based on the LS-Rapid and COMCOT models and incorporates the drag force resulting from the friction between the landslide mass and the water body to capture their mutual interactions. The model was subsequently implemented using the Fortran programming language. To validate the effectiveness of the model, we conducted a validation test by comparing our simulation results with Fernández-Nieto’s simulation results42 of landslide-induced waves in a water tank. The model setup and the physical parameters were consistent with those used by Fernández-Nieto42.
Figure 4 illustrates the model setup for the landslide-induced wave in a water tank. The model consists of a water tank measuring 10 m in length, 0.6 m in width, and 1 m in height. The bottom of the tank comprises a 5-m-long inclined plane with a slope angle of 11.31° on the left side and a 5-m-long horizontal plane on the right. The tank is bounded by two 1-m-high vertical sidewalls, and its right end features an open boundary. The thickness of the sliding mass is determined using Eq. (21), and the tank is initially filled with 0.4 m of quiescent water. The numerical model is employed to simulate wave generation resulting from the sliding mass descending the slope and entering the water. The A-A’ profile is specifically established to capture the dynamics of landslide motion and wave propagation. The computational domain is divided into 200 cells in the x-direction and 12 cells in the y-direction; therefore, \(\Delta x=0.05{\text{ m}}\) and \(\Delta y=0.05{\text{ m}}\).

Schematic diagram of the model setup for the landslide-induced wave in a water tank. (a) Side view; (b) Top view. A-A’ denotes the longitudinal section of the model.
As depicted in Fig. 5, the sliding mass descends along a slope and ultimately deposits on the bottom of the tank. Initially, the leading edge of the sliding mass moves rapidly, reaching a position at 6.45 m by 3.0 s, due to its unobstructed position. This initial deposit effectively obstructs the subsequent sliding mass from moving further forward along the water tank. The final deposit, shown in the stationary state of the sliding mass in Fig. 5, features a leading edge at 6.45 m and a maximum thickness of 0.85 m. When the sliding mass comes into contact with the water, waves are generated. Between 0 and 3.0 s, these waves propagate in the same direction as the sliding mass. By 4.0 s, the waves begin to propagate in the opposite direction to the sliding mass, with a maximum wave height of 0.04 m. The simulated results show good agreement with the numerical simulation by Fernández-Nieto42.

Comparison of simulation results with those of Fernández-Nieto42 along the A-A’ profile.
Application to the Huangtian landslide-Induced waves
This section employs the proposed numerical model to investigate the hazards of Huangtian landslide-induced waves in the XW reservoir, China. The XW reservoir spans 178 km and has a water level variation of 60 m, which is twice the range of variation in the Three Gorges reservoir25. As a result, the XW reservoir area faces significant challenges in addressing geological hazards. The Huangtian landslide, which is a typical case, occurred during the construction of a hydropower station in the XW reservoir and for which field measurements of wave heights are available. By comparing the simulation results with the monitoring data, it is validated that the model can effectively simulate real-world landslide-generated waves, with a high degree of accuracy and reliability.
Geographic and geological setting
The Huangtian landslide is located in Lincang County, Yunnan Province, China, in the downstream region of the Lancang River (24°44’8’’ N, 100°1’40’’ E) (Fig. 6). The study area lies within the tectonic collision zone between the Indian and Eurasian Plates, which has shaped a landscape characterized by numerous mountains and valleys. The topography features higher elevations in the northwest, gradually descending towards the south, with several peaks exceeding 3,000 m in altitude. Major rivers flowing through the study area include the Lancang River, Nu River, Jinsha River, and Heihui River, with the Lancang River traversing the region in a north-south direction (Fig. 6). The region serves as a transitional climate zone between cold and subtropical climates, with average annual precipitation ranging from 650 mm to 1,100 mm and maximum daily rainfall exceeding 100 mm. The average annual temperature ranges from 5 °C to 16 °C.
The fault zones in the study area primarily include the Lancangjiang Fault Zone (LCFZ), Honghe Fault Zone (HHFZ), Nantinghe Fault Zone (NTFZ), and Wanding Fault Zone (WDFZ). According to historical records of major earthquakes, over a hundred earthquakes (M ≥ 5) have occurred in the area in the past century, including 23 major earthquakes (M ≥ 6).

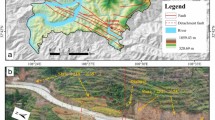
Location and tectonics of the study area. (a) Location of the study area (the red dashed line box indicates the area shown in Fig. b); (b) Location of the Huangtian landslide, showing historical earthquakes and major fault zones. (LCFZ: Lancangjiang Fault Zone; HHFZ: Honghe Fault Zone; NTFZ: Nantinghe Fault Zone; WDFZ: Wanding Fault Zone).
Characteristics of the Huangtian landslide
The characteristics of the Huangtian landslide were investigated using Google Earth imagery, field surveys, and digital surface model (DSM) with a resolution of 0.04 m, obtained from an unmanned aerial vehicle (UAV) in April 2024.
The Huangtian landslide is located on the right bank of the lower reaches of the Lancang River, approximately 9.5 km from the dam (Fig. 7). Following several days of heavy rainfall, on July 20, 2009, during the dam construction, the landslide occurred suddenly at a water level of 1,125 m. The debris entered the water, generating significant impact waves. Since the landslide occurred at night, the maximum wave height within reservoir, which could only be inferred from the wave traces left on the shore, were estimated to be between 30 and 40 m41. Meanwhile, the maximum wave height near the dam was recorded as approximately 3.0 m43.

Google Earth imagery of the study area. The white dashed-line box indicates the location of the Huangtian landslide. εwl1 represents the Wuliangshan Group, Cambrian; T2 − 3 represents the Middle Triassic. (LCFZ: Lancangjiang Fault Zone).
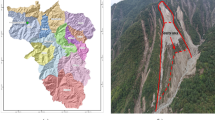
The Huangtian landslide is approximately 780 m in length and 450 m in width, with a volume of 9.5 Mm3 (Fig. 8). The landslide outlet is located at an elevation of approximately 1,080 m, while the headscarp is situated at around 1,550 m (Fig. 8). Following the failure, the back wall of the sliding surface is approximately 140 m in height and 300 m in width (Fig. 9). The deposited material forms a platform and a steep slope. The platform is located at an elevation of 1,400 m, and the steep slope, with an angle ranging from 50° to 60°, lies between elevations of 1,200 m and 1,400 m (Fig. 9).

Plan view and cross-section of the Huangtian landslide. (a) Plan view of the Huangtian landslide. The black line (B-B’) indicates the location of the cross section; (b) Cross section of the Huangtian landslide. The normal storage level of the reservoir is 1,240 m, while the water level during the landslide event was 1,125 m. (LCFZ: Lancangjiang Fault Zone). This figure was generated using ArcGIS Pro 3.1.6 (https://www.esri.com/) and Microsoft Excel 2021 (https://www.microsoft.com/).

Photographs of the Huangtian landslide. (a) Front view of the Huangtian Landslide, with the deposit outline indicated by a black line; (b) Side view of the Huangtian Landslide, with the deposit outline indicated by a black line.
Numerical simulation
Numerical model setting
The initial topography of the numerical model was constructed using a digital elevation model with a resolution of 12.5 m from the Alaska Satellite Facility through their Data Search platform. The sliding surface of the Huangtian landslide was determined using DSM with a resolution of 0.04 m, obtained by an industrial UAV in April 2024.
Figure 10 illustrates the model used to simulate the Huangtian landslide-induced waves. The landslide thickness is significantly greater in the upper section compared to the lower section, with the maximum thickness reaching 87.5 m (Fig. 10a). The simulation domain, measuring 18 km in length and 8.9 km in width, is divided into 1,440 cells in the x-direction and 712 cells in the y-direction. The fixed computational domain was determined from preliminary simulations of the area shown in Fig. 10a. The fixed computational cells primarily cover the landslide movement area and regions below an elevation of 1,300 m (Fig. 10b), comprising 230,172 grid cells, which accounts for approximately 22% of the total cells. Within the model, 11 monitoring points are spaced at 2 km intervals to track wave heights.

The model for simulating the Huangtian landslide-induced waves. (a) Initial distribution of landslide thickness; (b) Layout of the model. The red box denotes the area covered by fixed computational cells. Monitoring points P1–P11 are distributed within the area.
Physical parameters
In this study, the parameters adopted in the simulation of the Huangtian landslide-induced waves were determined through back-analysis of the limit equilibrium state of the Huangtian landslide slope, as well as through geotechnical laboratory tests on samples from the Xinminbazi landslide44 within the XW reservoir. The laboratory tests44 revealed that the steady-state friction angles of the sliding belt soil were 23.49° in the natural state and 20.3° in the saturated state.
Based on the DSM, the back-analysis of the limit equilibrium state of the Huangtian landslide slope, and the geotechnical laboratory tests of the Xinminbazi landslide, we inferred that the effective friction coefficient (\({H \mathord{\left/ {\vphantom {H L}} \right. \kern-0pt} L}\), where H and L denote the vertical drop and horizontal travel distance of the landslide, respectively) for the Huangtian landslide is approximately 0.5. Consequently, the apparent friction angle adopted in the simulation is approximately 25°, which is slightly higher than the steady-state friction angle of the sliding belt soil of the Xinminbazi landslide by approximately 1.5°.
Additionally, laboratory tests of the Xinminbazi landslide indicated that the steady-state friction angle of the sliding belt soil in the saturated state is approximately 86% of that in the natural state. Therefore, once the landslide entered the water, the apparent friction angle was adjusted to 22° in the simulation, corresponding to 88% of its initial value. Notably, the cohesion was assumed to be zero during the landslide movement. Settings for the Manning roughness coefficient and the drag coefficient drew upon the findings of Bosa7 and Pudasaini31, respectively. The specific parameters adopted in the simulation are detailed in Table 1.
Analysis of simulated results
Landslide motion
Figures 11, 12 and 13 illustrate the simulated results of the Huangtian landslide-induced waves at different times. Upon initiation of the simulation, the sliding mass rapidly descends along the slope. At 30 s, the landslide velocity reaches its maximum value of 34.09 m/s. Subsequently, the velocity decreases, with the upper and lower sections of the landslide stopping first. By 80 s, the landslide near the water surface also stops. The submerged volume of the deposit is approximately 4.35 Mm³, and the river remains unblocked (Figs. 13 and 14). The simulated deposit is in good agreement with the DSM obtained via UAV surveys in April 2024 (Figs. 15 and 16).

Simulated thickness of the sliding mass at different times in 3D.

Simulated velocity of the sliding mass at different times in 3D.

Simulated results of landslide-induced waves at different times along the B-B’ cross section.

Volume change of the Huangtian landslide over time.

Comparison of the simulated deposit with the DSM obtained from an UAV in 3D.

Comparison of the simulated deposit with the DSM obtained from an UAV along the B-B’ cross section.
Waves propagation
Figure 17 depicts the simulated water surface elevation at different times. At 30 s, the wave reached the opposite bank. Within the study area, the maximum wave height was recorded at 40.85 m, while the maximum run-up height on the opposite bank was measured at 34.1 m (Fig. 19). This is consistent with the results of the field survey (Fig. 20). Subsequently, the wave height decreased as the propagation distance increased (Figs. 18, 19 and 20). At 380 s, the wave reached the dam. Owing to the obstruction by the dam, the wave height at P10 was elevated to 3.75 m (Figs. 18 and 20).

Simulated water surface elevation at different times in 3D.

Simulated water surface elevation at monitoring points P1–P11 over time.

Simulated maximum wave height for each cell in 3D.

Discussion
Characteristics of the numerical model for landslide-induced waves
The numerical model was employed to simulate landslide-induced waves in a water tank, and the results were found to be in good agreement with those reported by Fernández-Nieto. Subsequently, the model was applied to simulate the Huangtian landslide-induced waves. The simulated landslide deposit closely matched the DSM obtained from UAV surveys. Field observations recorded maximum wave heights ranging from 30 to 40 m within the river channel, diminishing to approximately 3 m at the dam site situated 9.5 km downstream. The numerical model developed in this study predicted a maximum wave height of 40.85 m and a wave height of 3.75 m at the dam site. The simulated wave height at the dam site is approximately 0.75 m higher than the observation. This discrepancy likely stems from our model’s inability to fully represent the three-dimensional geometry of the hyperbolic arch dam. Nevertheless, an absolute error of this magnitude can be deemed acceptable in many engineering contexts.
In the preliminary simulation for the local area of the Huangtian landslide-generated surge (Fig. 10a), the landslide stopped at 80 s, and the wave height in the river channel dropped below 3 m by 200 s, with the simulation requiring a computation time of about 8 min. The simulation of the entire domain using a fixed computational grid (Fig. 10b) required approximately 100 min for the surge wave to propagate to the dam site. In contrast, Huang41 utilized an SPH model, simulating a maximum wave height of 48 m within a limited domain covering only 3 km near the landslide, thus not encompassing the dam site, with a reported computation time of 24 h.
In the simulation of the Huangtian landslide-induced waves, fixed computational cells accounted for approximately 22% of the total cells, which led to a four-fold improvement in computational efficiency over a full grid approach. Even with the additional cost of the preliminary simulation, the overall method still achieved a 3.7-fold improvement in computational efficiency over a full grid approach. Asunción46 found that integrating a load balancing algorithm with multiple GPUs improved speedup by only up to 12% over a single GPU. Therefore, the use of a fixed computational grid demonstrates a highly effective method for enhancing computational performance in these types of simulations.
Applications and future studies of the model
The model is based on the principles of fluid dynamics and the equilibrium of forces acting on columns, as described by Sassa26. Therefore, the model could be used to predict the scale and intensity of flow-slide-generated wave hazards, but it cannot capture the rock mass fragmentation and separation.
In this study, the apparent friction angle was treated as a constant. When simulating the Huangtian landslide-induced waves, the apparent friction angle for the submerged landslide material was adjusted to 22°, corresponding to 88% of its initial value. However, this approach is unable to provide a mechanistic description of the dynamic variations in material strength that occur during landslide motion. Yavari-Ramshe and Ataie-Ashtiani14 have shown that the constitutive behavior of the material significantly influences the deformation pattern and magnitude of landslides, as well as the propagation characteristics of landslide-induced waves. Future research should incorporate the dynamic variations in material strength during landslide movement into numerical models.
Conclusions
This study introduces an improved numerical model for simulating landslide-induced waves. The model is based on the LS-Rapid and COMCOT models and accounts for drag forces due to friction between the landslide mass and the water body. To validate the model’s effectiveness, it is employed to simulate a validation test of landslide-induced waves in a water tank. The simulated results show good agreement with those reported by Fernández-Nieto42. Subsequently, the model is employed to simulate a typical case of the Huangtian landslide-induced wave in the XW reservoir, China. The primary findings of this research are discussed in the following sections.
-
(1)
In the simulation of the Huangtian landslide-induced waves, based on the experimental data from the Xinminbazi landslide44 within the XW reservoir, the apparent friction angle of the submerged landslide material was adjusted to 22°, which corresponds to 88% of its initial value. The simulated landslide deposit closely matched the DSM obtained from UAV surveys.
-
(2)
In the simulation of the Huangtian landslide-induced waves, the maximum wave height was recorded at 40.85 m, while the maximum run-up height on the opposite bank was measured at 34.1 m. The wave height decreased with increasing propagation distance. However, due to the obstruction by the dam, the wave height near the dam increased from 1.57 m to 3.75 m.
-
(3)
This model has advantages in rapidly analyzing landslide-induced waves. In the simulation of the Huangtian landslide-induced waves, fixed computational cells accounted for approximately 22% of the total cells, which led to a four-fold improvement in computational efficiency over a full grid approach. The maximum wave height used to assess the hazards associated with these waves only requires a computational time of approximately 100 min.
Data availability
All data generated or analyzed during this study are available from the corresponding author upon reasonable request.
References
DAI, F. C. & LEE, C. F. A Spatiotemporal probabilistic modelling of Storm-Induced shallow landsliding using airphotos and logistic regression. Earth Surf. Process. Landf. 5, 527–545. https://doi.org/10.1002/esp.456 (2003).
Ke, Z., Dai, F., Fan, Q., Guo, Y. & Zhao, S. The giant Mid-Holocene Linka rock avalanche with Long-Runout river blockage in the southeastern Tibetan plateau. Landslides 11, 2769–2787. https://doi.org/10.1007/s10346-024-02311-y (2024).
WARD, S. N. & DAY, S. The 1958 Lituya Bay landslide and tsunami — a tsunami ball approach. J. Earthq. Tsunami. 4, 285–319. https://doi.org/10.1142/S1793431110000893 (2010).
Barla, G. & Paronuzzi, P. The 1963 Vajont landslide: 50Th anniversary. Rock. Mech. Rock. Eng. 46, 1267–1270. https://doi.org/10.1007/s00603-013-0483-7 (2013).
Fritz, H. M., Hager, W. H. & Minor, H. Lituya Bay case; rockslide impact and wave Run-Up. Sci. Tsunami Hazards. 19, 3–22 (2001).
Liu, Q., Pan, M., Wang, X., An, Y. A. & Two-Layer Model for landslide generated impulse wave; simulation of the 1958 Lituya Bay landslide impact wave from generation to Long-Duration transport. Adv. Water Resour. 154, 103989. https://doi.org/10.1016/j.advwatres.2021.103989 (2021).
Bosa, S. & Petti, M. Shallow water numerical model of the wave generated by the Vajont landslide. Environ. Modelling Software: Environ. Data News. 26, 406–418. https://doi.org/10.1016/j.envsoft.2010.10.001 (2011).
Manenti, S., Salis, N. & Todeschini, S. 3D Wcsph modelling of Landslide-Water dynamics during 1963 Vajont disaster. Sci. Rep. 14, 27504–27518. https://doi.org/10.1038/s41598-024-77922-5 (2024).
Liu, P. L. F. et al. Coastal landslides in palu Bay during 2018 Sulawesi earthquake and tsunami. Landslides 17, 2085–2098. https://doi.org/10.1007/s10346-020-01417-3 (2020).
Pudjaprasetya, S. R., Adytia, D. & Subasita, N. Analysis of Bay bathymetry elements on wave amplification: A case study of the tsunami in palu Bay. Coast Eng. J. 63, 433–445. https://doi.org/10.1080/21664250.2021.1930749 (2021).
Hu, Y., Yu, Z. & Zhou, J. Numerical simulation of landslide-Generated waves during the 11 October 2018 Baige landslide at the Jinsha river. Landslides 10, 2317–2328. https://doi.org/10.1007/s10346-020-01382-x (2020).
Aránguiz, R. et al. Analysis of the cascading Rainfall–Landslide–Tsunami event of June 29Th, 2022, Todos Los Santos lake, Chile. Landslides 20, 801–811. https://doi.org/10.1007/s10346-022-02015-1 (2023).
Hunt, J. E. et al. Submarine landslide megablocks show half of Anak Krakatau Island failed on December 22Nd, 2018. Nat. Commun. 12, 2827. https://doi.org/10.1038/s41467-021-22610-5 (2021).
Yavari-Ramshe, S., Ataie-Ashtiani, B. & Ataie-Ashtiani, B. Numerical modeling of subaerial and submarine Landslide-Generated tsunami Waves-Recent advances and future challenges. Landslides 13, 1325–1368. https://doi.org/10.1007/s10346-016-0734-2 (2016).
Shen, W., Berti, M., Li, T., Benini, A. & Qiao, Z. The influence of slope gradient and gully channel on the Run-Out behavior of Rockslide-Debris flow: an analysis on the Verghereto landslide in Italy. Landslides 19, 885–900. https://doi.org/10.1007/s10346-022-01848-0 (2022).
Mulligan, R. P., Franci, A., Celigueta, M. A. & Take, W. A. Simulations of landslide wave generation and propagation using the particle finite element method. J. Geophys. Res. Oceans. 125, 1-17 https://doi.org/10.1029/2019JC015873 (2020).
Chen, S. et al. Numerical investigation of landslide-Induced waves: A case study of Wangjiashan landslide in Baihetan reservoir, China. Bull. Eng. Geol. Environ. 82, 1-13 https://doi.org/10.1007/s10064-023-03148-w (2023).
Wang, R., Ding, M., Wang, Y., Xu, W. & Yan, L. Field characterization of landslide-induced surge waves based on computational fluid dynamics. Front. Phys. 9, 813827 https://doi.org/10.3389/fphy.2021.813827 (2022).
Wang, R. et al. Numerical simulation of the formation and propagation of landslide-induced waves a case study of the Rm Dam Reservoir (Southwest China). Landslides. 1–16. https://doi.org/10.1007/s10346-025-02491-1 (2025).
Ghaïtanellis, A., Violeau, D., Liu, P. L. F. & Viard, T. Sph simulation of the 2007 chehalis lake landslide and subsequent tsunami. J. Hydraul Res. 59, 863–887. https://doi.org/10.1080/00221686.2020.1844814 (2021).
Zhao, K., Qiu, L., Yuan, T., Wang, Y. & Liu, Y. Two-Phase Mpm simulation of surge waves generated by a granular landslide on an erodible slope. Water. 15, 1307. https://doi.org/10.3390/w15071307 (2023).
Dai, Z., Li, X. & Lan, B. Three-dimensional modeling of tsunami waves triggered by submarine landslides based on the smoothed particle hydrodynamics method. J. Mar. Sci. Eng. 11 2015. https://doi.org/10.3390/jmse11102015 (2023).
Zhao, K., Qiu, L. & Liu, Y. Two-Layer Two-Phase material point method simulation of granular landslides and generated tsunami waves. Phys. Fluids. 34, 123312. https://doi.org/10.1063/5.0128867 (2022).
Wang, J. et al. Simulating Landslide-Induced tsunamis in the Yangtze river at the three Gorges in China. Acta Geotech. 16, 2487–2503. https://doi.org/10.1007/s11440-020-01131-3 (2021).
Wu, H. et al. Numerical simulation on potential Landslide–Induced wave hazards by a novel hybrid method. Eng. Geol. 331, 107429. https://doi.org/10.1016/j.enggeo.2024.107429 (2024).
Sassa, K., Osamu, N., Renato, S., Yoichi, Y. & Hidemasa, O. An integrated model simulating the initiation and motion of earthquake and rain induced rapid landslides and its application to the 2006 Leyte landslide. Landslides 3, 219–223. https://doi.org/10.1007/s10346-010-0230-z (2010).
Wang, F., Sassa, K., Iovine, G. G. R., Pastor, M. & Sheridan, M. F. Landslide simulation by a geotechnical model combined with a model for apparent friction change. Phys. Chem. Earth Parts a/B/C. 35, 149–161. https://doi.org/10.1016/j.pce.2009.07.006 (2010).
Zhou, R. Application of Ls-Rapid to simulate the motion of two contrasting landslides triggered by earthquakes. Open. Geosci. 1, 47–54. https://doi.org/10.1515/geo-2022-0713 (2024).
Liu, P. L. F. et al. Numerical simulations of the 1960 Chilean tsunami propagation and inundation at hilo, Hawaii. Adv. Nat. Technological Hazards Res. 4, 99–115 (1995).
Fauzi, M. A. R., Chairiyah, H. F., Ahmad, A. L. & Tarigan, T. A. B. Tsunami vulnerability study in Ngambur and Bengkunat districts, West Coast of Lampung using Comcot. Zona Laut Jurnal Inovasi Sains Dan. Teknol. Kelautan 213–222. https://doi.org/10.62012/zl.v5i3.41676 (2024).
Pudasaini, S. P. A full description of generalized drag in mixture mass flows. Eng. Geol. 265, 105429. https://doi.org/10.1016/j.enggeo.2019.105429 (2020).
Pudasaini, S. P. & Mergili, M. Mechanically controlled landslide deformation. J. Geophys. Res. Earth Surf. 129, 1–21. https://doi.org/10.1029/2023JF007466 (2024).
Hungr, O. A model for the runout analysis of rapid flow slides, debris flows, and avalanches. Can. Geotech. J. 610–623. https://doi.org/10.1139/T95-063 (1995).
Shen, W., Li, T., Li, P. & Guo, J. A. Modified finite difference model for the modeling of flowslides. Landslides 15, 1577–1593. https://doi.org/10.1007/s10346-018-0980-6 (2018).
Bilal, M. et al. Coupled 3D numerical model for a landslide-Induced impulse water wave; A case study of the Fuquan landslide. Eng. Geol. 290, 106209. https://doi.org/10.1016/j.enggeo.2021.106209 (2021).
Luo, H. Y. et al. Energy transfer mechanisms in Flow-Like landslide processes in deep valleys. Eng. Geol. 308, 106798. https://doi.org/10.1016/j.enggeo.2022.106798 (2022).
Liu, P. L. F., Cho, Y., Briggs, M. J., Kanoglu, U. & Synolakis, C. E. Runup of solitary waves on a circular Island. J. Fluid Mech. 302, 259–285. https://doi.org/10.1017/S0022112095004095 (1995).
Tri Laksono, F. A., Aditama, M. R., Setijadi, R. & Ramadhan, G. Run-up height and flow depth simulation of the 2006 south java tsunami using Comcot On Widarapayung Beach. Iop Conf. Ser. Mater. Sci. Eng. 982 12047. https://doi.org/10.1088/1757-899X/982/1/012047 (2020).
Iverson, R. M. & Ouyang, C. Entrainment of bed material by Earth-Surface mass flows: review and reformulation of Depth‐Integrated theory. Rev. Geophys. 53, 27–58. https://doi.org/10.1002/2013RG000447 (2015).
Shen, W., Wang, D., Qu, H. & Li, T. The effect of check dams on the dynamic and bed entrainment processes of debris flows. Landslides 16, 2201–2217. https://doi.org/10.1007/s10346-019-01230-7 (2019).
Huang, C. et al. Numerical simulation of the Large-Scale Huangtian (China) Landslide-Generated impulse waves by a Gpu-Accelerated Three-Dimensional Soil-Water coupled Sph model. Water Resour. Res. 59, 1–21. https://doi.org/10.1029/2022WR034157 (2023).
Fernández-Nieto, E. D., Bouchut, F., Bresch, D., Castro Díaz, M. J. & Mangeney, A. A new Savage–Hutter type model for submarine avalanches and generated tsunami. J. Comput. Phys. 227, 7720–7754. https://doi.org/10.1016/j.jcp.2008.04.039 (2008).
Yunpeng, L., Jiahao, W. & Hui, L. Surge prediction study of a reservoir bank landslide near a hydropower dam. Di Qiu Ke Xue Qian Yan. 5, 114–129. https://doi.org/10.12677/ag.2015.53015 (2015).
Yunpeng, L., Runqiu, H. & Hui, D. Stability of Xinminbazi landslide located in Xiaowan hydropower station reservoir region. J. Mt. Sci. 29, 328–336. https://doi.org/10.3969/j.issn.1008-2786.2011.03.010 (2011).
Liu, W., He, S. A. & Two-Layer Model for simulating landslide dam over mobile river beds. Landslides 3, 565–576. https://doi.org/10.1007/s10346-015-0585-2 (2016).
de la Asunción, M., Castro, M. J., Mantas, J. M. & Ortega, S. Numerical simulation of tsunamis generated by landslides on multiple Gpus. Adv. Eng. Softw. 99, 59–72. https://doi.org/10.1016/j.advengsoft.2016.05.005 (2016).
Acknowledgements
This work was supported by the China Huaneng Group Technological Project (No. HNKJ22-H107), and the Major Scientific and Technological Special Project of Yunnan Province (No. 202202AF080004).
Author information
Authors and Affiliations
Contributions
X. Y.: Methodology, Validation, Visualization, Writing - Original Draft. F. D.: Conceptualization, Funding Acquisition, Methodology. Z. K.: Methodology, Validation data. J. Z.: Formal analysis, Resources. W. C.: Formal analysis, Resources.
Corresponding author
Ethics declarations
Competing interests
The authors declare no competing interests.
Additional information
Publisher’s note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Electronic supplementary material
Below is the link to the electronic supplementary material.
Rights and permissions
Open Access This article is licensed under a Creative Commons Attribution-NonCommercial-NoDerivatives 4.0 International License, which permits any non-commercial use, sharing, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons licence, and indicate if you modified the licensed material. You do not have permission under this licence to share adapted material derived from this article or parts of it. The images or other third party material in this article are included in the article’s Creative Commons licence, unless indicated otherwise in a credit line to the material. If material is not included in the article’s Creative Commons licence and your intended use is not permitted by statutory regulation or exceeds the permitted use, you will need to obtain permission directly from the copyright holder. To view a copy of this licence, visit http://creativecommons.org/licenses/by-nc-nd/4.0/.
About this article

Cite this article
Yue, X., Dai, F., Ke, Z. et al. An improved numerical model for landslide-induced waves and its application to the Huangtian landslide in the XW reservoir, China. Sci Rep 15, 27366 (2025). https://doi.org/10.1038/s41598-025-11959-y
Received:
Accepted:
Published:
DOI: https://doi.org/10.1038/s41598-025-11959-y
