
Abstract
This paper presents a method for generating dynamic caustic patterns by utilising dual-optimised holographic fields with Phased Array Transducer (PAT). Building on previous research in static caustic optimisation and ultrasonic manipulation, this approach employs computational techniques to dynamically shape fluid surfaces, thereby creating controllable and real-time caustic images. The system employs a Digital Twin framework, which enables iterative feedback and refinement, thereby improving the accuracy and quality of the caustic patterns produced. This paper extends the foundational work in caustic generation by integrating liquid surfaces as refractive media. This concept has previously been explored in simulations but not fully realised in practical applications. The utilisation of ultrasound to directly manipulate these surfaces enables the generation of dynamic caustics with a high degree of flexibility. The Digital Twin approach further enhances this process by allowing for precise adjustments and optimisation based on real-time feedback. Experimental results demonstrate the technique’s capacity to generate continuous animations and complex caustic patterns at high frequencies. Although there are limitations in contrast and resolution compared to solid-surface methods, this approach offers advantages in terms of real-time adaptability and scalability. This technique has the potential to be applied in a number of areas, including interactive displays, artistic installations and educational tools. This research builds upon the work of previous researchers in the fields of caustics optimisation, ultrasonic manipulation, and computational displays. Future research will concentrate on enhancing the resolution and intricacy of the generated patterns.
Similar content being viewed by others

Introduction
In optics, caustics is defined as “the envelope of light rays that have been reflected or refracted by a curved surface or object, or the projection of that envelope of rays on another surface”1. When light enters an object with a high refractive index from the air, its direction of travel is altered in accordance to Snell’s law. A convex surface focuses light towards the center, thereby creating a bright spot in the vicinity of the focal point and a region of reduced brightness at the edges (Fig. 1a). In contrast, concave surfaces bend light outward, brightening the edges and darkening the center (Fig. 1b).

The core principle of forming caustic patterns through acoustic modulation of a liquid surface. (a,b) illustrate how the liquid surface deforms into convex or concave shapes due to acoustic pressure, resulting in caustic pattern formation. When parallel light rays pass through the deformed refractive surface, they are either focused inward (convex) or dispersed outward (concave), creating distinct caustic patterns. This iterative optimization process adjusts the liquid surface shape to align the refracted light distribution with a desired target image. The results displayed in (c) are visualizations of a numerically simulated process. This process calculates the phase delay of each transducer in the acoustic phased array based on the distance to the focal point, thereby estimating the liquid surface shape and generating the caustic pattern. The leftmost image shows the acoustic pressure distribution used to deform the liquid surface, followed by the corresponding liquid surface deformation. Finally, the resulting caustic pattern is shown from the side and front views, revealing a bright ring with a darker center that closely matches the intended target image.
Researchers have investigated methods for computing the shape of a light-refracting surface in order to generate specific projected images utilising caustics. For instance, methods have been proposed to calculate smooth refractive surfaces capable of producing desired images using differential geometry approaches2,3. Schwartzburg et al. proposed a method to calculate refractive surfaces with smooth regions, infinite strength singularities, and wholly black regions by solving the optimal transport problem4. However, these approaches often involve static solid acrylic surfaces, limiting their ability to produce dynamic animations. Additionally, they require milling processes on materials to achieve caustics in real-world applications. While Yue et al. 3 optimized continuous and smooth refractive surfaces using the Poisson equation, Schwartzburg et al. 4 introduced piecewise smooth surfaces, resulting in high-contrast caustic images with stark black regions and optical density singularities. Our method, due to the use of a liquid surface, aligns more closely with the approach by Yue et al., leading to more gradual transitions in the refractive surface and, consequently, lower contrast.
Previous studies have proposed the use of liquid surfaces as refractive media for caustic generation, however, such work has been limited to in-silico simulations and has not been fully realized in practical applications5. Here, we experimentally demonstrate dynamic caustics capable of depicting text and images by directly shaping fluid surfaces using ultrasound, achieving dynamic caustics in practise where previous studies were limited to simulations. To achieve this, we utilized a Phased Array Transducer (PAT), a technology commonly used for non-contact tactile displays6,7,8, volumetric displays9,10 and digital microfluidics11.
Our approach to generating dynamic caustic patterns relies on the precise manipulation of fluid surfaces using the PAT. The PAT used in this study is equipped with 256 transducers arranged in a 16 \(\times\) 16 matrix, which allows for the generation of complex acoustic pressure fields12. These pressure fields are capable of deforming the liquid surface in a controlled manner, thereby influencing the refraction of light and producing caustic patterns. As shown in Fig. 2, The PAT is positioned 200 mm above the liquid surface, which is composed of 1 kg of transparent silicone oil, contained within a transparent acrylic tank.
Shin-Etsu Chemical KF-96H-10000 silicone oil (cosmetic name: Dimethicone) was selected for its high viscosity of 10,000 \(\hbox {mm}^{2}/\hbox {s}\) at \(25^{\circ }\hbox {C}\), which suppresses bubble formation under high acoustic pressures and stabilizes liquid surface deformation. Its specific gravity is 0.975, and its refractive index ranges from 1.399 to 1.403 (measured with respect to the sodium D line), making it suitable for precise light refraction. Additionally, it has a speed of sound of approximately 987 m/s and a surface tension of 20–21 mN/m.
The experiment was conducted at approximately \(25^{\circ }\hbox {C}\), as the physical properties of silicone oil vary with temperature. Specifically, the specific gravity of the KF-96H series decreases from 0.975 at \(25^{\circ }\hbox {C}\) to 0.960 at \(50^{\circ }\hbox {C}\), while the viscosity of KF-96H-10000 drops from 10,000 mm2/s at \(25^{\circ }\hbox {C}\) to 9,800 mm2/s at \(30^{\circ }\hbox {C}\).
The silicone oil’s high viscosity suppresses fluid flow, reducing unintended fine vibrations and surface waves, stabilizing the caustic pattern generation. However, excessive viscosity may hinder the liquid surface’s ability to quickly respond to ultrasonic pressure changes, potentially reducing responsiveness (Fig. 3).

Schematic representation of the experimental setup and the principles behind caustic generation. (a) Overall system configuration including the phased array transducer, camera, mesh screen, silicone oil tank, Fresnel lens, and point light source. (b) Illustration of how light from below is collimated by the Fresnel lens and then refracted at the silicone oil surface, projecting a caustic pattern onto the mesh screen. (c) Depiction of how ultrasonic waves emitted from the phased array transducer pass through the mesh screen, deforming the silicone oil surface and dynamically modulating the formed caustic pattern.

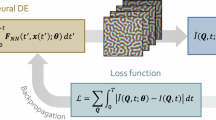
Schematic diagram of the experimental setup and in-situ caustics optimization using a Digital Twin. The resulting caustics are captured by a camera at an angle to the screen and used for feedback. The captured caustics are compared to the target image, with the difference fed into the loss function, and the derivatives of the numerical model are calculated using automatic differentiation for real-time optimization.
The system setup includes a vertically arranged configuration in which the PAT is directed downward towards the liquid medium (Fig. 2). A parallel light source is created using a point LED light source, which is then collimated by a Fresnel lens to produce uniform illumination from below the tank. As the ultrasound waves emitted by the PAT interact with the liquid surface, they generate acoustic pressure fields that deform the surface, leading to the formation of caustic patterns when the light is refracted by these deformations. The acoustic pressure induces concave deformations on the liquid surface. As shown in Fig. 1b, these concave surfaces bend light outward, generating shadows. In Fig. 1c, a single focal point of acoustic pressure deforms the surface, resulting in a caustic pattern with a dark center, surrounded by light focused outward. The relationship between the acoustic pressure and the surface deformation is direct: higher pressure amplitudes induce larger deformations, which in turn create more pronounced refractive effects. While defining an absolute minimum physical threshold is difficult, we subjectively observed that for a single focal point, an acoustic pressure below approximately 250 Pa was insufficient to generate a clearly recognizable caustic pattern under our experimental conditions. Therefore, our experiments operate in a pressure range above this practical threshold but below the point of cavitation or atomization.
Numerical optimization of acoustic pressure for caustic images
To project the desired target image as caustics, an efficient numerical optimization scheme is desirable. Through trial and error, we observed that the acoustic pressure field approximates the resultant caustics field well and, therefore, opted to optimize the caustics image via acoustic hologram optimization. Recent progress in acoustic hologram optimization led to the ability to generate more complex acoustic fields than a single focus point, and we employ Diff-PAT13, as it was recently demonstrated that it can efficiently use experimental feedback to improve acoustic hologram accuracy14.
To optimize the acoustic pressure distribution based on the target image; we begin by calculating the total sound pressure \(p_t(x, y)\) at a point (x, y) on the plane using:
where M is the total number of transducers, and \(P_{ref}\) represents the amplitude of the reference pressure. Furthermore, \(d(x, y, x_t, y_t)\) denotes the Euclidean distance between the point (x, y) on the plane and the position \((x_t, y_t)\) of the transducer, while \(D(\theta ) = \frac{2J_1(kr \sin (\theta ))}{kr \sin (\theta )}\) is the far-field directivity function of the transducer, with \(\theta\) being the angle between the transducer’s normal and the point (x, y). Here, \(J_1\) is the Bessel function of the first kind of order 1, and \(r=5\) mm is the transducer radius. Furthermore, k is the wavenumber, given by \(k = \frac{2\pi f}{c_0}\), where it is assumed that the speed of sound in the air (\(c_0\)) is 346 m / s. Lastly, \(\phi _m\) represents the phase delay of the m-th transducer. The absolute value of this complex pressure, \(|p_t(x,y)|\), represents the predicted pressure amplitude field, hereafter denoted as \(P_{pred}\).
We then calculate the minimization loss function using the target image \(P_{target}\) and \(P_{pred}\) within the same Region of Interest (ROI). It is important to note that the target image should be input such that white is represented as 0 and black as 255. This is because, as illustrated in Fig. 1, caustics are generated such that the shadows, i.e., the black areas, approximate the acoustic pressure field. Therefore, when optimizing the acoustic pressure field from the target image, it is essential to ensure that the acoustic pressure field is generated in the black areas of the target image. Generally, Python libraries such as OpenCV represent white as 255 and black as 0, thus it may be necessary to invert the image to achieve the correct black and white representation in some cases.
In the loss function (Equation 2), S represents the set of coordinates for each grid defined on the plane where the sound pressure calculation is performed. The subscript n, on which \(P_{target, n}\), and \(P_{pred, n}\), depend, represents the number of optimization steps by the Adam optimizer. \(P_{target}\) and \(P_{pred}\) are vectorized images. The normalized target pressure is given by
while the normalized numerically simulated pressure field, based on equation 1, is defined as
By defining the loss function in this way, \(P_{pred}\) is appropriately normalized while the optimization is performed, balancing the accuracy of the maximum pressure and the pressure distribution. The acoustic hologram, \(\phi _m\), is optimized using the Adam optimizer15, an algorithm widely adopted for its efficient iterative updates in applications such as machine learning. The initial phase estimate for each transducer is generated randomly, and the gradient necessary for optimization is computed through reverse-mode automatic differentiation with respect to the objective function \(L_{num}\).
The optimization runs for a fixed 1000 steps, without utilizing convergence criteria. This approach ensures that phase adjustments for the transducers form the desired sound pressure distribution over the two-dimensional plane within the predetermined step limit. The resulting pressure distribution closely replicates the target image, and the simulated loss demonstrates stable behavior after approximately 400 steps, as shown in Fig. 4 (Simulation Loss).
Time averaging
While the loss function has converged well and the generated acoustic pressure field closely resembles the target image, we observe that the generated caustics are sensitive to unevenness in the field, resulting in local bright spots. To mitigate this issue, we employ a time-averaging method by updating the PAT at a high frequency, which helps to even out these local bright spots. This approach aligns with recent methods proposed by Elizondo et al., who suggested similar techniques to enhance the spatial resolution of acoustic pressure fields in general16.
We calculated the time-averaged pressure amplitude using:
where F is the number of frames. This time-averaged pressure field can be substituted into equation 2 for this averaged pressure. The improved caustics images with the varying number of frames (3, 9, 24 frames) are shown in Fig. 4b–d, respectively. The latest PAT can reach up to an update frequency of 10,000 Hz17.
Enhancing caustic generation with digital twin
In order to further enhance the quality of the generated caustics, we perform experimental optimization. The experimental optimization of acoustic holograms presents a challenge, given that typical PAT systems comprise hundreds of transducers, and obtaining finite differences in such systems is time-consuming and inefficient. However, it is possible to approximate the gradient of the loss function in an experiment by combining the derivative obtained via automatic differentiation with the experimentally obtained values, as demonstrated by Fushimi et al., 2024. This camera-in-the-loop approach shares its core philosophy with recent advancements in optical holography, where experimental feedback is used to refine computational models and correct for discrepancies between simulation and reality18,19,20. While those methods address purely optical systems, our framework extends camera-in the-loop optimization to complex multi-physics problem (acoustic-fluid-optic). We show that single image per step for the optimization is sufficient to optimize the complex interplay between physical domain and achieve efficient multiphysics optimization.
In this approach, the generated caustics are captured using a camera fixed between the PAT and the tank, as illustrated in Fig. 2. Since the caustic image is captured from an angle, a perspective transform is employed in OpenCV. The transform matrix required was obtained experimentally using a checkerboard pattern. The warped image is then cropped and rotated to fit the size of the target image. Furthermore, to remove non-caustic artifacts from the image, we utilize a calibration image captured prior to the display of caustics. The resulting image, designated \(C_{img}\), is then passed to the Digital Twin optimization scheme, as depicted in Fig. 1. Our use of ’Digital Twin’ follows the framework established by Fushimi et al. 2024, which integrates experimental feedback with the gradients from a differentiable numerical model, rather than implying a full-fidelity predictive simulation of the entire physical system.
Rather than normalizing the pressure amplitude, we opted to utilize a cosine similarity loss function to compare the similarity between the target image and the experimentally obtained caustics21. As with numerical optimization, it is crucial to ensure that the target image is input such that white is represented as 0 and black as 255.
where \(\langle {P_{dt}}, P_{target} \rangle\) denotes the inner product of \({P_{dt}}\) and \(P_{target}\), and \(\Vert {P_{dt}} \Vert\) along with \(\Vert P_{target} \Vert\) represent their respective norms. The Digital Twin uses the images taken to optimise the caustics directly, and the use of cosine similarity prevents the sound pressure from becoming too loud in some areas. While cosine similarity does not explicitly encode spatial structure (i.e. input vector shifted by \(\pi\) could still be identified as the same loss), this is mitigated in our framework because the optimization begins from a spatially coherent pattern generated by the initial numerical simulation, preventing convergence to drastically different spatial arrangements such as a mirrored or inverted image.
The experimentally obtained images are input into the Digital Twin framework as follows. It is important to ensure that the experimentally obtained images are also input as the target images, with white set to 0 and black set to 255.
where \(P_{num}\) represents the acoustic pressure obtained through numerical calculations, and \(C_{img}\) denotes the experimentally obtained caustics images. \(G\) is used to prevent halt tracking of \(C_{img} - P_{num}\) by employing the tf.stop_gradient() function in TensorFlow. This ensures that the term is treated as a constant and unaffected by automatic differentiation.
The caustic images with Digital Twin optimisation are illustrated in Fig. 4a–d. In contrast to the numerical simulation, the loss value does not converge as smoothly in the Digital Twin optimisation. However, the contrast between the white and black regions in the checkerboard is significantly enhanced with the application of Digital Twin.

Experimental results for the sound pressure distribution-based focusing technique with varying numbers of frames. Each row now displays, from left to right: the target pattern; the numerically simulated acoustic pressure distribution optimized via Diff-PAT, which serves as the initial target for the liquid surface deformation; visualization of the experimentally generated caustics before Digital Twin application, with a close-up view of a selected region; visualization of the experimentally generated caustics after Digital Twin application, with a corresponding close-up view, demonstrating improved pattern definition; the convergence of the numerical simulation loss (\(L_{num}\)); and the convergence of the Digital Twin loss (\(L_{dt}\)). The Phased Array Transducer (PAT) was operated at a frequency of 44.7 Hz, corresponding to an individual PAT frame duration of approximately 22.37 ms. The ’number of frames’ (1, 3, 9, 24) in the subplots indicates the quantity of these PAT frames over which the acoustic field was time-averaged to produce the deformation on the liquid surface for each displayed caustic image.
Results and discussion
Animating caustics
The prime advantage of this method is its ability to alter caustics temporally. In this instance, the caustics are presented in a sequence of individual frames, rather than in the conventional sequence of frames that would be expected in an animated sequence. The actual animation, which is generated by projecting the frames in succession, is included in the supplementary materials video. To characterize the temporal response, we evaluated the relaxation time of the high-viscosity silicone oil (Shin-Etsu KF-96H-10000). After applying an acoustic pressure of 1645 Pa (single focus) and then removing it, the surface required approximately 1.22 seconds to fully relax. Given that our animation operates at 5 Hz ( 200 ms per frame), this slow relaxation means that residual surface deformation from the preceding frame persists, but contributes to smoother visual transitions. Each frame was created by superimposing the sound pressure of nine frames in order to optimize the initial sound pressure distribution, which was then processed using Digital Twin technology. The resulting caustic animations are presented in Fig. 5. Animations a-b, c-d, and e-f depict parallel flowing sticks, a character preying on a square object while sucking it, a running stick figure, a fish swimming while twisting its body, and an animation showing ripples spreading out from the center, respectively. Given the dynamic nature of the caustic image, we strongly encourage readers to view the original video, which can be found in the supplementary material.

Comparison of target outcome used for animation and the generated caustics, presented frame by frame. The actual animation, created by projecting these frames sequentially, is included in the Supplemental material video. Each frame was generated by superimposing the sound pressure of 9 frames and then processed using the Digital Twin. (a,b): Animation of parallel flowing sticks. (c,d): Animation of a character preying on and sucking a square object. (e,f): Animation of a running stick figure. (g,h): Animation of a fish swimming and twisting its body. (i,j): Animation showing ripples spreading from the center.
Contrast and loss behavior in multi-frame processing
While other quantitative metrics such as PSNR (Peak Signal-to-Noise Ratio) and SSIM (Structural Similarity Index) are commonly used for image quality assessment, we found them unsuitable for evaluating the current quality of our generated caustics. This is primarily because these metrics are designed to compare images with similar characteristics and are sensitive to pixel-level differences. However, in the current stage of our system, the generated caustic patterns, while visually recognizable, still exhibit significant differences in their textural properties compared to the target images. These differences stem from factors such as the inherent limitations of acoustic-based liquid surface deformation, the presence of noise as discussed previously, and the resolution limits of our current setup. Consequently, PSNR and SSIM tend to yield low scores that do not accurately reflect the perceived visual quality or the progress achieved in generating dynamic caustics. Therefore, we opted for Weber Contrast as a more pragmatic metric for this study, as standard metrics such as PSNR/SSIM are ill-suited for comparing images with inherently different textures (e.g., a sharp target versus a diffuse caustic). Cosine similarity, while effective for optimization due to its brightness invariance, does not directly measure perceived contrast, which is a key perceptual attribute for these images. as it focuses on the relative luminance difference between the target and its background, which aligns better with the characteristics of our current caustic images22.
Here, \(\Delta L\) represents the change in luminance of the target relative to the uniform background luminance L. For our analysis, we divided the caustic image into a target area and a background area based on the target image, using the average brightness of each area for the calculation.
As shown by the Weber Contrast values annotated in Fig. 4, improvements are observed after applying Digital Twin processing across all frame counts. For instance, in the case of frame 1, the contrast increased by 231% from 0.039 to 0.129. However, as the number of frames increased, a slight reduction in contrast was observed. This can be attributed to the averaging effects of acoustic pressure fields over multiple frames, which smooth the resulting caustics but simultaneously suppress fine features and sharp edges.
Despite the contrast improvements, the loss function during optimization displayed a notable behavior, particularly when increasing the number of frames. As shown in Fig. 4 Digital Twin Loss, the loss initially decreases and stabilizes around 200-400 steps but begins to rise again during later stages. This trend becomes more pronounced for higher frame counts, such as 9 and 24 frames. The differences between the numerical optimization process and the Digital Twin optimization likely contribute to this phenomenon.
In numerical optimization, the target is a simple acoustic pressure distribution, and the loss function minimizes the absolute error between the predicted and target pressure fields. Conversely, the Digital Twin optimization uses experimentally captured caustic patterns as the target and employs cosine similarity as the loss function. The two approaches differ not only in their respective loss formulations but also in the nature of the target images. While numerical optimization operates purely in the acoustic domain, the Digital Twin incorporates real-world factors such as light refraction, surface tension, viscosity, and experimental noise. These physical complexities make it more challenging for the loss to converge smoothly, particularly in multi-frame scenarios where the acoustic field becomes increasingly intricate.
Another contributing factor is the optimization algorithm itself. The Adam optimizer, used in both numerical and Digital Twin optimizations, updates parameters based on momentum and adaptive learning rates. This can cause the loss to oscillate near local minima, especially in multi-frame processing where the complexity of the acoustic pressure distribution and its interactions with the liquid surface are amplified. Additionally, time-averaging the pressure fields over multiple frames further increases the deviation between the predicted and target caustics, as finer details in the experiment may not be preserved accurately.
Although the loss function does not exhibit smooth convergence in Digital Twin optimization, the contrast between the white and black regions of the checkerboard target is significantly improved as shown in Fig. 4. We hypothesize that the noisy and non-convergent behavior of the loss function arises from the complexity of our multi-physics system, which couples acoustic, fluidic, and optical phenomena. This creates a challenging optimization landscape that was not present in previous work focused on single-physics systems. Despite the non-ideal loss behavior, the clear visual quality improvements validate the method’s effectiveness in solving such complex inverse problems (Fig. 6).

Caustic generation results. In all cases, the left image is the target image, and the right image shows the experimentally generated caustic pattern.
Resolution
Our experiments focused on evaluating the resolution of caustic patterns generated through optimized sound pressure distributions. Figure 7 presents the results of varying the distance between two circles to assess their resolution.
We generated two circles, each with a radius of 10 mm, and varied the distance between them from 1 mm to \(-4\) mm (where they increasingly overlap). Images were captured at different frame counts (1, 3, 9, 24 frames) both before and after applying Digital Twin processing. The findings reveal that when the regions are of an optimized size, they can be distinctly resolved, whether adjacent or separated. Even with an overlap as small as 1 mm, the regions maintain their shapes after optimization. However, as the overlap increases to 2 mm or more, preserving the shapes becomes increasingly challenging.
Digital Twin processing consistently improves contrast across all frame counts (Fig. 7). However, it does not significantly enhance resolution, indicating that sound pressure optimization plays a more crucial role in achieving high resolution than optical enhancements alone.
For overlaps of 2 mm or more, shape maintenance becomes difficult across all frame counts. Nevertheless, using nine or more frames results in relatively better shape preservation compared to cases with three or fewer frames. This indicates that higher frame counts can contribute to enhanced shape preservation under certain conditions. In conclusion, these results underscore the importance of optimizing sound pressure distribution to achieve high-resolution caustic patterns.

Resolution comparison using two circles with a radius of 10 mm, generated simultaneously with varying center-to-center distances. The distances range from 1 mm (bottom row) to -4 mm (top row, indicating overlap), increasing by 1 mm per row. The second row from the bottom shows the circles touching at their outer edges. Images were captured with 1, 3, 9, and 24 frames, both before and after applying the Digital Twin process.
Noise characteristics
Our experiments reveal two main categories of noise that reduce the clarity of the generated caustic patterns, as illustrated in Figs. 1c, 4, and 7. The first type consists of dark, spot-like artifacts that manifest in regions intended to be uniformly illuminated. These artifacts commonly arise from acoustic grating lobes inherent in the beamforming process of the transducer array, as well as from interference patterns caused by partial reflections at the tank walls or mesh screen holders. Such unintended acoustic pressure maxima introduce localized surface deformations in the liquid, leading to ring-shaped or blotchy dark regions on the caustic image. Although increasing the number of frames for time-averaging can partially mitigate these effects, small residual patches tend to remain, particularly in areas of high curvature or abrupt transitions in the caustic pattern.
A second form of noise appears as bright speckles in areas that should remain dark. These speckles often originate from subtle ripples on the liquid surface—caused by microscopic fluid motion—that focus or scatter the parallel light rays in unpredictable ways. In addition, minor misalignments in the Fresnel lens, mesh screen, or camera calibration can amplify such bright points, since even a small deviation in the optical path can redirect light into otherwise shadowed regions.
Figures 4 and 7 demonstrate that raising the frame count for time-averaging substantially alleviates both dark patches and bright speckles, resulting in improved global contrast. Nevertheless, there is an inherent trade-off between noise suppression and sharpness, as excessive averaging can soften the edges of the projected pattern, reducing the sharpness of the final caustic image. Taken together, these observations indicate that dark noise typically stems from unwanted grating lobes and interference, whereas bright speckles are more closely tied to local surface ripples and optical scattering. While time-averaging and Digital Twin optimization partly address both issues, neither approach fully resolves them, underscoring the need for more refined fluid modeling, transducer design, and optical alignment.
Limitations and future directions
The fidelity of the generated images is also constrained by fundamental parameters, including transducer array spacing, operating frequency, and the size of the fluid surface. Currently, the optical outcomes cannot match the sharpness of static glass-based methods, leading to inherently softer and less defined patterns (Figs. 5, 6). Scaling up the phased array configuration and the liquid surface dimensions is a promising direction to improve acoustic field control and potentially achieve finer pattern details. For practical deployment beyond controlled laboratory settings, the system’s scalability and robustness to environmental factors are also critical. Temperature fluctuations could alter the liquid’s properties and the speed of sound, affecting accuracy. External vibrations may induce unwanted surface oscillations, degrading pattern stability. Furthermore, long-term operation could lead to oil degradation from prolonged ultrasonic exposure. Addressing these factors through adaptive control, vibration isolation, and material selection will be crucial for real-world applications.
Future work will focus on refining the loss function and optimization strategies to enable more nuanced grayscale transitions. Exploring techniques such as advanced beamforming, the use of metasurfaces, or adaptive algorithms could better balance large-scale shape control with the pursuit of finer detail. These advancements, while potentially increasing complexity and cost, represent steps towards novel forms of optical modulation through dynamic liquid interfaces.
This research, despite its limitations, introduces a new category of optically modulated surfaces and real-time computational optimization methods. The ability to generate dynamic, controlled caustic patterns opens several exploratory application avenues. For instance, in ambient displays, this technology could create subtle, ever-changing light patterns on walls or tables, enriching architectural spaces without the visual intrusion of conventional screens. In interactive art installations, viewers could influence the fluid surface with their movements or sounds, creating a direct, tangible link between themselves and the resulting light art. While practical deployment will require further advances, this research establishes a promising foundation for such future possibilities.
Methods
Equipment setup
The experimental setup, as depicted in Fig. 2a and detailed in Table 1, was placed in a dark room to minimize ambient light interference. This vertically aligned system facilitated the simultaneous generation of optical and acoustic fields. A Phased Array Transducer (PAT) with 256 transducers (40 kHz, TAMURA, H2 50137) arranged in a 16 \(\times\) 16 matrix was positioned 200 mm above the liquid medium’s surface. The PAT was controlled by an FPGA board (Waveshare CoreEP4CE6) as described by Morales et al.12. The liquid medium consisted of 1 kg of transparent silicone oil (Shin-Etsu Sillicons, KF-96H-10000) contained within a transparent acrylic tank (155 mm length, 155 mm width, and 45 mm height). A point LED light source (ELEKIT LK-3WH) was placed below the tank and collimated using a Fresnel lens (Nihon Tokushu Kogaku Jushi, AH0498891). A nylon mesh screen (106 micrometers thick, 150 \(\times\) 150 grid with 61 micrometers per grid) was positioned between the silicone oil tank and the PAT.
Image acquisition and camera calibration
Caustic patterns were captured using two cameras equipped with a PoC sensor kit (Sony Semiconductor Solutions Corporation) and FUJIFILM CF12ZA-1S lenses (F1.8/12 mm). The cameras were positioned diagonally to the projection screen to avoid obstruction by the Fresnel lens. These cameras operated at a resolution of 5320 \(\times\) 4600 pixels and captured images at 6 frames per second with a gain of 30.0 dB and an exposure time of 6 ms.
To correct for perspective distortion, a camera calibration was performed using a standard checkerboard pattern and the OpenCV library. A series of checkerboard images at various orientations were captured. Four corresponding points were manually selected on the checkerboard in the captured image and a reference frontal view. These points were used to calculate a perspective transformation matrix using the cv2.getPerspectiveTransform() function. This matrix was subsequently applied to the captured caustic images using the cv2.warpPerspective() function to obtain a frontal view of the caustic patterns, ensuring accurate alignment and measurement. The root mean square (RMS) reprojection error for this transformation, calculated over a 1000x1000 pixel analysis region using a 5x5 grid, was 4.622 pixels. This level of distortion was deemed acceptable for the current study’s scope, as demonstrated by successful improvements in caustics quality in the manuscript.. The transformation matrix was saved for later use.
Acoustic hologram generation and upload
The calculated phase delays were discretized and uploaded to the FPGA board controlling the PAT. Communication with the FPGA was established using the PySerial library. The phase values were sent to the respective transducers to generate the desired acoustic pressure field.
Dynamic caustic generation procedure
The software and packages used in this manuscript is as summarized in Table 2, and the procedure for generating dynamic caustic patterns are as follows:
-
1.
Target Image Preparation: A target grayscale image was loaded using the Pillow (PIL) library and converted to a NumPy array. The pixel values were inverted such that black areas corresponded to high acoustic pressure regions. The image was then resized to 192x192 pixels using bicubic interpolation via TensorFlow.
-
2.
Initial Phase Calculation: Initial phase delays for each transducer were calculated numerically using the Diff-PAT method13, as described in the Introduction. This involved optimizing the phase delays to produce the desired acoustic pressure distribution corresponding to the inverted target image. The TensorFlow library was used for the numerical optimization, employing the Adam optimizer15.
-
3.
Liquid Surface Modulation: The generated acoustic pressure field deformed the surface of the silicone oil. The concave deformations acted as dynamic lenses, refracting the collimated light passing through the liquid.
-
4.
Caustic Pattern Capture: The resulting caustic pattern projected onto the mesh screen was captured by the cameras.
-
5.
Digital Twin Optimization: The captured image was processed using a Digital Twin framework implemented in TensorFlow. This involved applying the pre-calculated perspective transformation matrix and subtracting a background image to isolate the caustic pattern. The processed image was then compared to the target image using a cosine similarity loss function. The gradients of the loss function were calculated using automatic differentiation in TensorFlow, and the transducer phase delays were iteratively adjusted to minimize the loss, refining the caustic pattern.
-
6.
Time Averaging (Optional): For some experiments, the phase delays were updated sequentially over multiple frames (3, 9, or 24 frames) to implement a time-averaging technique, as described in the Results and Discussion section.
The numerical optimization of the acoustic hologram is detailed in the Introduction. The Digital Twin optimization process, including the loss function and update rule, is also described in the Introduction. This section focuses on the experimental implementation of these methods.
Data availability
All data generated or analyzed during this study, including experimental measurements, simulation results, and analysis scripts, are available in the Digital Nature Group repository at https://github.com/DigitalNatureGroup/Dynamic-Caustics-by-Ultrasonically-Modulated-Liquid-Surface.
References
Weinstein, L. A. & Beckmann, P. Open Resonators and Open Waveguides (The Golem Press, Boulder (Colo.), 1969).
Yue, Y., Iwasaki, K., Chen, B.-Y., Dobashi, Y. & Nishita, T. Pixel art with refracted light by rearrangeable sticks. Comput. Graph. Forum 31, 575–582 (2012).
Yue, Y., Iwasaki, K., Chen, B.-Y., Dobashi, Y. & Nishita, T. Poisson-based continuous surface generation for goal-based caustics. ACM Trans. Graph. 33, 1–7 (2014).
Schwartzburg, Y., Testuz, R., Tagliasacchi, A. & Pauly, M. High-contrast computational caustic design. ACM Trans. Graph. 33, 1–11 (2014).
Suzuki, K., Fujisawa, M. & Mikawa, M. Simulation controlling method for generating desired water caustics. In 2019 International Conference on Cyberworlds (CW), vol. 0, pp. 163–170 (2019).
Hoshi, T., Takahashi, M., Iwamoto, T. & Shinoda, H. Noncontact tactile display based on radiation pressure of airborne ultrasound. IEEE Trans. Haptics 3, 155–165. https://doi.org/10.1109/TOH.2010.4 (2010).
Long, B., Seah, S. A., Carter, T. & Subramanian, S. Rendering volumetric haptic shapes in mid-air using ultrasound. ACM Trans. Graph. 33, 1–10. https://doi.org/10.1145/2661229.2661257 (2014).
Monnai, Y. et al. Haptomime: mid-air haptic interaction with a floating virtual screen. In Proceedings of the 27th annual ACM symposium on User interface software and technology, 663–667 (2014).
Hirayama, R., Plasencia, D. M., Masuda, N. & Subramanian, S. A volumetric display for visual, tactile and audio presentation using acoustic trapping. Nature 575, 320–323. https://doi.org/10.1038/s41586-019-1739-5 (2019).
Fushimi, T., Marzo, A., Drinkwater, B. W. & Hill, T. L. Acoustophoretic volumetric displays using a fast-moving levitated particle. Appl. Phys. Lett. 115, 064101. https://doi.org/10.1063/1.5113467 (2019).
Koroyasu, Y. et al. Microfluidic platform using focused ultrasound passing through hydrophobic meshes with jump availability. PNAS Nexus 2, gad207 (2023).
Morales, R., Ezcurdia, I., Irisarri, J., Andrade, M. A. B. & Marzo, A. Generating airborne ultrasonic amplitude patterns using an open hardware phased array. NATO Adv. Sci. Inst. Ser. E Appl. Sci. 11, 2981 (2021).
Fushimi, T., Yamamoto, K. & Ochiai, Y. Acoustic hologram optimisation using automatic differentiation. Sci. Rep. https://doi.org/10.1038/S41598-021-91880-2 (2021).
Fushimi, T., Tagami, D., Yamamoto, K. & Ochiai, Y. A digital twin approach for experimental acoustic hologram optimization. Commun. Eng. 3, 1–8 (2024).
Kingma, D. P. & Ba, J. L. Adam: A method for stochastic optimization. 3rd International Conference on Learning Representations, ICLR 2015 - Conference Track Proceedings1, 1–15 (2015).
Elizondo, S., Ezcurdia, I., Goñi, J., Galar, M. & Marzo, A. Enhancing the quality of amplitude patterns using time-multiplexed virtual acoustic fields. Appl. Phys. Lett. 123, 154102. https://doi.org/10.1063/5.0164657 (2023) https://pubs.aip.org/aip/apl/article-pdf/doi/10.1063/5.0164657/18166719/154102_1_5.0164657.pdf.
Plasencia, D. M., Hirayama, R., Montano-Murillo, R. & Subramanian, S. Gs-pat: High-speed multi-point sound-fields for phased arrays of transducers. ACM Trans. Graph https://doi.org/10.1145/3386569.3392492 (2020).
Peng, Y., Choi, S., Padmanaban, N. & Wetzstein, G. Neural holography with camera-in-the-loop training. ACM Trans. Graph. 39, 185:1-185:14. https://doi.org/10.1145/3414685.3417802 (2020).
Choi, S., Gopakumar, M., Peng, Y., Kim, J. & Wetzstein, G. Neural 3d holography: Learning accurate wave propagation models for 3d holographic virtual and augmented reality displays. ACM Trans. Graph. 40, 240:1-240:12. https://doi.org/10.1145/3478513.3480542 (2021).
Choi, S. et al. Time-multiplexed neural holography: A flexible framework for holographic near-eye displays with fast heavily-quantized spatial light modulators. In Proceedings of the ACM SIGGRAPH 2022 Conference (SIGGRAPH ’22), 1–., https://doi.org/10.1145/3528233.3530734 (Association for Computing Machinery, New York, NY, USA, 2022).
Lee, M., Lew, H. M., Youn, S., Kim, T. & Hwang, J. Y. Deep learning-based framework for fast and accurate acoustic hologram generation. IEEE Transactions on Ultrasonics, Ferroelectrics and Frequency Control. https://doi.org/10.1109/TUFFC.2022.3219401 (2022).
Peli, E. Contrast in complex images. J. Opt. Soc. Am. A 7, 2032–2040 (1990).
Acknowledgements
We would like to extend our sincere gratitude to Sony Semiconductor Solutions Corporation for their generous support in lending us a sensor kit, which was instrumental in the completion of our research. Additionally, we deeply appreciate the efforts of our lab member, Mr. Takumi Yokoyama, for his exceptional work in capturing the equipment and results beautifully. We gratefully acknowledge the support of AI tools, OpenAI’s GPT-4, and Anthropic’s Claude. The authors have diligently reviewed and verified all generated outputs to ensure their accuracy and relevance.
Author information
Authors and Affiliations
Contributions
K.N., T.F., and Y.O. conceived the research. K.N. designed the experiments, conducted the experimental work, and acquired the data. K.N. and A.T. contributed to data analysis. T.F. and Y.O. supervised the project and contributed to the interpretation of the results. All authors contributed to writing, revising, and final approval of the manuscript.
Corresponding author
Ethics declarations
Competing interests
The authors declare no competing interests.
Additional information
Publisher’s note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Supplementary Information
Supplementary Information 1.
Supplementary Information 2.
Supplementary Information 3.
Supplementary Information 4.
Supplementary Information 5.
Supplementary Information 6.
Supplementary Information 7.
Rights and permissions
Open Access This article is licensed under a Creative Commons Attribution-NonCommercial-NoDerivatives 4.0 International License, which permits any non-commercial use, sharing, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons licence, and indicate if you modified the licensed material. You do not have permission under this licence to share adapted material derived from this article or parts of it. The images or other third party material in this article are included in the article’s Creative Commons licence, unless indicated otherwise in a credit line to the material. If material is not included in the article’s Creative Commons licence and your intended use is not permitted by statutory regulation or exceeds the permitted use, you will need to obtain permission directly from the copyright holder. To view a copy of this licence, visit http://creativecommons.org/licenses/by-nc-nd/4.0/.
About this article

Cite this article
Nagakura, K., Fushimi, T., Tsutsui, A. et al. Dynamic caustics by ultrasonically modulated liquid surface. Sci Rep 15, 31928 (2025). https://doi.org/10.1038/s41598-025-16190-3
Received:
Accepted:
Published:
Version of record:
DOI: https://doi.org/10.1038/s41598-025-16190-3
