
Abstract
As the fear of infection is a crucial factor in the progress of the disease in the population. We aim, in this study, to investigate a susceptible-protected-infected-recovered (SPIR) epidemic model with mixed diffusion modeled by local and nonlocal diffusions. These types of diffusion are used to model the fear effect of being infected by the population. The model is shown to be well-posed; the solution exists, is positive, and is unique. The variational expression is obtained to determine threshold role of \(\mathfrak {R}_0\), also known as the basic reproduction number. Indeed, for \(\mathfrak {R}_0<1\), we show that the epidemic will extinct, corresponding to the global asymptotic stability of the infection-free equilibrium state. However, when \(\mathfrak {R}_0>1\), the existence of the infection equilibrium state and the uniform persistence of the solution have been proved. The Lyapunov function have been used to show the global asymptotic stability of the infection equilibrium state. Moreover, we compared the obtained results with the classical SIR epidemic model for determining the required protection function for stopping the disease, which can be obtained by reducing \(\mathfrak {R}_0\) below one.
Similar content being viewed by others


Introduction
In the worst-case scenarios, any infectious that can cause severe sickness or even death can be associated with fear in society. Like any other emotion, this fear of infection is contagious and can spread rapidly. As a change of behavior due to the pandemic crisis, fear can lead individuals to “homestay,” on the individual level or on the household level1, to avoid contact with the population and getting the infection. This consequently led to “agoraphobia”2 in certain people, as was the case during the recent Covid-19 pandemic, when many governments were implementing large-scale restrictions on the population mobility as a measure to protect the population from the spread of the disease. The natural question is: To what extent is “homestay”, as a protection measure, effective in reducing the impact of the pandemic?
Scarcely, no models have incorporated the impact of fear, even though it is easily spread. A mathematical and computational model that integrated both fear dynamics and contagion disease was presented by Epstein et al.3. Valle et al.4 studied a model that discusses the impact of fear-based homestay as behavior change on the expansion of pandemic influenza. But the question still remains if it is enough to stop the progress of the pandemic.
In investigating and understanding the spread of infectious diseases, mathematical and computational models play a significant role. The objective of these investigations is to anticipate the consequences of some specific public health interventions such as vaccination5, treatment6, education7, media effect8, lockdown9 when applied to contain the spread of disease. These studies have been very helpful in discovering new public health safety measures and determining the most efficient measure that would dampen the disease under consideration. Interestingly, the non-infected class rigorously practices and respects the new health interventions as they become cautious about getting infected.
The spread of disease among people can be reduced through educational campaigns and some controlling mechanisms10. One such control measure is the homestay, which we will refer to in our paper as “protection.” An observation indicates that the susceptible class is the one that is scared of getting infected the most. Moreover, adapting the mode of protection varies from person to person within the non-infected class, as some would have preferred vaccination while others would have opted for isolation or maybe the combination of these.
It is to highlight that the global dynamics of a delayed epidemic model is governed by its basic reproduction number \(\mathfrak {R}_0\), and the goal of carrying out protection-related studies is to find the protection effort required to reduce \(\mathfrak {R}_0\) below one. Finding the most efficient protective system for different populations has always been challenging. Mezouaghi et al.11 used a similar approach to find the required minimal protection rate \(b_{2\min }\) to stop an epidemic. In12, the protection measure’s effect on the spread of infection was studied using an age-structured model in which the obtained basic reproduction number represented the equilibrium states, which were also globally stable.
Any outbreak of a disease is highly influenced by its spatial dispersion. Notably, a high spatial diffusion can dampen a disease. Based on a similar idea, many scholars and researchers have investigated the spatiotemporal effect on infectious disease13,14,15,16. These models have been further categorized to include local diffusion and nonlocal dispersion to analyze the spread of the disease. Han and Lei propose one such model14 where they have infused local diffusion in a diffusive SIR epidemic model in a heterogeneous environment. Moreover, the former category is represented by a Laplacian operator (\(\Delta\)), which many scholars also use to predict the process of the disease spread among different populations such as17,18 and the references therein.
It is to be noted that to date, all proposed mathematical models either use the local dispersion15,16,19,20,21 or the nonlocal dispersion13,14,17,18,22. Our paper introduces a noble approach to building a spatiotemporal model that infuses both local and nonlocal dispersion to investigate the effect of fear on the spread of the disease. In our model, the extremely careful movements of the non-infected populace (the susceptible and the protected category) due to the fear of getting infected across the studied area \(\Gamma\) (assumed as a bounded set in \(\mathbb {R}\)) is considered by the local-diffusion operator (Laplacian operator or random diffusion). By definition, the random diffusion represents that the movements are done in the neighborhood of the original point x. This behavior is modeled by using the S-equation and P-equation of a delayed epidemic model. Here, it is worth mentioning that most movements are used for extreme needs, such as running errands. Moreover, we can’t emphasize less that it is hard to study fear without the spatial movements of the individuals as they are highly influenced by it. On the other hand, after becoming infected, a person with agoraphobia may experience increased mobility, as they may need to visit hospitals and other locations, leading to a significant rise in their movement compared to their initial (susceptible) status. This type of behavioral change is also observed with some sexually transmitted diseases, where individuals may initially overemphasize precautions, potentially contributing to agoraphobia. Media coverage can further amplify agoraphobia within the population. Numerous diseases, such as COVID-19, influenza, chickenpox, hepatitis A, and Ebola, have shown similar influences on mobility.
On the other hand, after being infected the individuals will lose their precaution, and become more free to move, and the phobia from being infected will be gone. In this case, the movement of the ones that been infected, that includes infected and recovered persons, are more often and the radius of the movement in no longer in the neighborhood of the original point. Therefore, the random diffusion no longer models the spatial movements of this category. To model this, we will use different dispersal operator, that is nonlocal diffusion23,24,25,26,27, that defined as
with J is the probability distribution of leaping from position y to location x. consequently, each individual sinks to location x at the rate \(\int _\Omega J(x-y)\phi (y)dy\) and abandons his place at that rate. The support of the function J can be considered to cover more area than the neighbor of the location x, for the purpose of modelling losing caution obtain after being infected. For more reading on the properties, and the basic theory of the nonlocal diffusion operator, we refer the excellent references23,24,25, and for the recent achievements on the nonlocal diffusion problems, we refer26,28,29,30,31,32,33,34. Notably, Mezouaghi et al.11 is a special case of what follows next. Therefore, we propose the following delay epidemic model, which is given after infusing all assumptions mentioned above:
with \(t>0\) and \(x \in \Gamma\). The associated initial and boundary conditions
where the susceptible populace S(t, x), the protected class of individuals P(t, x), the infected population I(t, x), and the recovered class of persons R(t, x) are defined at time t and position x. \(\delta _S\), \(\delta _P\), \(\delta _I\), \(\delta _R\) are diffusion coefficients. At position x, \(b_3\) gives the birth coefficient. \(b_4\) and \(b_5\) represent (for every unit of time) the natural death and recovery rates, respectively. \(b_6\) is the death rate due to infection at location x. \(b_2\) is the protection rate at location x, and \(\epsilon\) is the proportion of the protected population that finished the protection period and became susceptible again. The term \(\varepsilon b_2 e^{-b_4\tau }S(t-\tau ,x)\) represents the population entering into the protected class at time \(t-\tau\), completing the duration of protection \(\tau\), leaving the isolation and then becoming susceptible again at time t and location x. This type of modeling is motivated by the approach35. Moreover, the system considers the Neumann boundary conditions (1), for more information on the difference of Neumann and Dirichlet boundary conditions for nonlocal diffusion, we refer23. Also, the model coefficients take on the following assumptions:
- (A1):
-
\(\delta _S,\delta _P,\delta _I,\delta _R\ge 0\), with \(\delta _S,\delta _I\) are not both zero.
- (A2):
-
On \(\bar{\Gamma }\), the strictly positive \(b_4\) and \(b_3\) are also Lipschitz continuous .
- (A3):
-
On \(\bar{\Gamma }\), \(b_6\), \(b_2\) \(b_5\), and \(b_1\) are nonnegative and continuous.
- (A4):
-
On \(\mathbb {R}\), the Lipschitz function J(x) satisfies
$$1=\int _{\mathbb {R} }J(x)dx, ~ J(x) \text{ is } \text{ strictly } \text{ positive } \text{ on } \bar{\Gamma }\text{, } \text{ and } \int _\Gamma J(x-y)dy\not \equiv 1\text{, } J(x)=J(-x) \text{ on } \mathbb {R} \text{. }$$
Determining the global dynamics of the model (1) is the true motivation of our paper. Moreover, we compare the dynamics of (1) with the classical SIR epidemic model to characterize the influence of the protection on reducing the epidemic. We will proceed by taking into consideration the effect of the protection force \(b_2\) on the containment of the epidemic and by assuming that \(\mathfrak {R}_0 ^{SIR}>1\) (the basic reproduction number corresponding to the SIR model). The focus of this paper is to search for the optimal protection force \(b_2\) so that the basic reproduction number \(\mathfrak {R}_0\) of (1) becomes less than one, which leads eventually to the containment of the epidemic. This protection force \(b_2\) not only influences the temporal behavior of the solution but also has a strong relationship with the fear among the individuals.
To achieve this goal, the manuscript is organized as follows. In section “Basic results”, we provide some basic results to show that our system is well-posed, i.e., its solution exists, is unique, and is positive. Further, we have shown that the model admits a unique infection-free equilibrium state (IFEs). We concluded the section by calculating the corresponding \(\mathfrak {R}_0\). In section “IFEs”, the Lyapunov function has been used to prove that IFEs when \(\mathfrak {R}_0<1\), is globally stable. Section “IEs” is provided with the proof of the existence of the infection equilibrium state (will be denoted by IEs), the solution, and its uniform persistence when \(\mathfrak {R}_0>1\). Moreover, we have shown that the IEs is globally asymptotically stable when one of the diffusion coefficients \(\delta _i,~~ i=1,2\) is a zero. In section “Relationship between local and corresponding nonlocal diffusion”, we determined the relationship between local and nonlocal diffusion and discussed how nonlocal diffusion generalizes local diffusion. In section “The situation of the epidemic influenced by the protection force”, we have presented our findings about how protection is helpful in stopping the epidemic by calculating the required minimal protection force. Our mathematical results have been supported numerically in section “Numerical investigation of the results”.
Basic results
To facilitate our the notations, \(f(x)= f,~x\in \bar{\Gamma }\), where \(f= b_1, b_2,b_3,b_4, b_5,b_6\). We further consider \(f^-=\min \{f(x),~~x\in \bar{\Gamma }\}\), with \(f \in C(\bar{\Gamma })\) .
Let
be a Banach space equipped with the norm
and the positive cone in \(\mathbb {Y}\) is
Defining the linear operator
and
Hence, (1) can be formulated as:
We got the following the result:
Lemma 1
A strictly contractive and uniformly continuous semi-group \(\{ e ^{At}\}_{t\ge 0}\) is generated by A. Moreover, for all \(t\ge 0\), \(e ^{At}\mathbb {Y}_+\) is contained in \(\mathbb {Y}_+\)
Proof
We decompose the operator A as \(A=A_0+A_1\), with
with \(\tilde{J}(x)=\int _\Gamma J(x-y)dy\), and \(U\in \mathbb {Y}\). Hence \(\{ e ^{At}\}_{t\ge 0}\), a strictly contractive and uniformly continuous semi-group is generated by \(A_0\) on \(\mathbb {Y}\). Using presumption (A4), we deduce that \(A_1\) is bounded. Thus we concluded that A produces a positive continuous semi-group \(\{ e ^{At}\}_{t\ge 0}\) with the help of36, Theorem 1.2] and 37, Corollary VI 1.11] resulting in the desired result. \(\square\)
The result about the solution’s existence is given next:
Theorem 1
Suppose that \(\tilde{U}_0=\left( \psi _1,\psi _2,\psi _3,\psi _4\right) \in \mathbb {Y}\). Hence, there exists \(t_0>0\) that ensures the solution for (1), denoted by \(U(.,U_0)\in \mathbb {C}((0,t_0),\mathbb {Y})\cap \mathbb {C}^1([0,t_0],\mathbb {Y})\), exists and is unique and verifies that either \(t_0=\infty\) or \(\limsup _{t\rightarrow t_0 ^-}\Vert \tilde{U}(t,\tilde{U}_0)\Vert =\infty\) holds. Furthermore, if \(\tilde{U}_0\in \mathbb {Y}_+\), then \(\tilde{U}(t,\tilde{U}_0)\in \mathbb {Y}_0\) for \(t\in (0,t_0)\).
Proof
Expressed below is the solution of (1):
Clearly, F is a \(C^1\) functional. Then,38, Proposition 4.16] guarantees that unique solution denoted by \(\tilde{U}(.,\tilde{U}_0)\in \mathbb {C}([0,t_0],\mathbb {Y})\cap \mathbb {C}^1([0,t_0],\mathbb {Y})\) for (1) exists and verifies \(t_0=\infty\) or \(\limsup _{t\rightarrow t_0 ^-}\Vert \tilde{U}(t,\tilde{U}_0)\Vert =\infty .\) Now, for \(t\in (0,t_0)\) and \(x\in \bar{\Gamma }\) we have \(S(t,x)>0\) . Assuming that there exists \(x_0\in \Gamma\) and \(\tilde{t}\in (0,t_0)\) verifying \(S(\tilde{t},x_0)=0\), and \(S(t,x_0)>0\) for \(t<\tilde{t}\). Then, we can define
Clearly, \(t_1\in (0,t_0),\) with \(S(t_1,x_0)=0\) such that \(\dfrac{\partial S (t_1,x_0)}{\partial t}\le 0.\) The first eq. of (1) yields
contradicting our supposition. Hence, for \(t\in (0,t_0)\), \(S(t,x)>0\) and \(x\in \bar{\Gamma }\).
For sufficiently large \(h>0\), we let \(F(\tilde{U}(t,.))+h \tilde{U}(t,.)= F_h(\tilde{U})\). Evidently, for \(B\left( 0,\dfrac{1}{h}\right)\) which represents an open ball centered at 0 with radius \(\dfrac{1}{h}\) in \(\mathbb {Y}\), we can have a positive \(F_h(\tilde{U})\) for \(\tilde{U}\in B\left( 0,\dfrac{1}{h}\right) \cap \mathbb {C}((0,t_0),\mathbb {Y})\). Hence, (1) can be written as:
Then, the solution is
As a result, for \(t\in (0,t_0)\), \(\tilde{U}(t,U_0)\in \mathbb {Y}_+\) , for \(\tilde{U}_0\in \mathbb {Y}_+.\) \(\square\)
Next, we let \(\{\tilde{\Theta }(t)\}_{t\ge 0}:R^+\times \mathbb {Y}_+\rightarrow \mathbb {Y}_+\) be the semiflow associated to the system (1), that is defined as
We use the following theorem to check the well-posedness of the solution:
Theorem 2
\(\tilde{U}(t,\tilde{U}_0)\) with \(\tilde{U}_0\in \mathbb {Y}_+\) for (1) is the unique solution. Hence,the unique global solution is \(\tilde{U}(t,\tilde{U}_0):[0,+\infty )\rightarrow \mathbb {Y}_+\). Moreover, (1) generates a bounded dissipative semiflow \(\{\tilde{\Theta }(t)\}_{t\ge 0}\).
Proof
Denote \(N(t)=\int _\Gamma S(t,x)+P(t,x)+I(t,x)+R(t,x)dx\), then
with \(b_4^-=\min _{x\in \bar{\Gamma }} \{b_4\}\). We infer that if \(N(0)\le \frac{\int _\Gamma b_3 dx}{b_4^-}\) then for \(t\in [0,t_0)\), \(N(t)\le \frac{\int _\Gamma b_3 dx}{b_4^-}\) using the variation constant method. Next, we have \(\tilde{S}(t,x)\ge S(t,x)\) for all \(t>0\) and \(x\in \Gamma\) by the standard comparison principle, where \(\tilde{S}(t,x)\) satisfies
with the Neumann boundary conditions. It is easy to show that \(\tilde{S}(t,x)\rightarrow S^0(x)\) as \(t\rightarrow \infty\) (the detailed proof will be done later in step 1 section “Uniform persistence”). Therefore, we have \(\limsup _{t\rightarrow \infty }\Vert S\Vert \le K_S,~~t\ge 0\) for some positive constant \(K_S\) that depends on the initial data. The boundedness of \(P-\)equation can be deduced from S being bounded. Moreover, based on the fact that \(\int _\Gamma Idx\) is bounded i.e. \(\exists\) a constant \(\tilde{K_I}>0\) such that \(\int _\Gamma Idx\le \tilde{K_I},~\forall\) \(t\in [0,t_0]\), then we have
A simple calculation implies that a constant M (that depends on the site of \(\max \{b_1 K_sI(t,x)-(b_4+b_5+b_6), ~~x\in \bar{\Gamma }\}\) exists such that \(\Vert I(t,x)\Vert \le K_I e^{Mt}\), with \(K_I\) depending only on the initial data. Therefore, from Theorem 1 we conclude that \(t_0=\infty\) has a globally well-posed solution. The previous conclusions imply that the semiflow \(\{\tilde{\Theta }(t)\}_{t\ge 0}\) is globally defined and is bounded dissipative by the boundedness result. \(\square\)
The first and third equations in (1) do not contain P and R. So, the following delayed spatiotemporal model is obtained by reducing (1):
with \(t>0\) and \(x \in \Gamma\).
Remark 1
By analyzing the asymptotic behavior of the reduced system represented by equation (5), we can deduce remaining equations through the application of the comparison principle. This involves demonstrating that the supremum and infimum are equal.
Now we define a Banach space
With the following norm:
and \(\mathbb {X}_+= \mathbb {C}([-\tau ,0]\times \bar{\Gamma },\mathbb {R}^+)\times \mathbb {C}(\bar{\Gamma },\mathbb {R}^+)\) be the positive cone in \(\mathbb {X}\).
Define the semiflow that corresponds to the system (5) as \(\{\Theta (t)\}_{t\ge 0}:R^+\times \mathbb {X}_+\rightarrow \mathbb {X}_+\), which is formulated as follows:
\(\{\Theta (t)\}_{t\ge 0}\) is also bounded dissipative since \(\{\tilde{\Theta }(t)\}_{t\ge 0}\) is bounded dissipative semiflow from Theorem 2.
Existence of IFEs
Letting \(E^0=(S^0,0)\in \mathbb {C}(\bar{\Gamma },\mathbb {R}^+)\times \mathbb {C}(\bar{\Gamma },\mathbb {R}^+)\) is the IFEs for (5), where \(S^0\) is the solution of the problem:
The next lemma guarantees the existence and the uniqueness of \(S^0\) in \(\mathbb {C}(\bar{\Gamma },\mathbb {R}^+).\)
Lemma 2
The IFEs, \(E^0=(S^0,0)\in \mathbb {X}_+\) is unique for the system (5).
Proof
The existence of IFEs can be shown by determining the zeros of the following function:
In order to determine the root \(S^0(x)\) of \(H(S^0(x))=0\), a lower and upper solution denoted by \(\underline{S}^0(x)\) and \(\overline{S}^0(x)\) respectively, will be formulated verifying:
Since \(H(0)=b_3>0\), \(\exists\) \(\mathfrak {m}>0\) sufficiently small implying that \(H(\mathfrak {m})>0\). We then put \(\underline{S}^0(x)=\mathfrak {m}\). Similarly, we consider \(\mathfrak {M}>0\) is a positive constant sufficiently large that verifies \(\mathfrak {M}>\mathfrak {m}\). Moreover, we put \(\overline{S}^0(x)=\mathfrak {M}\). Thus,
Since \(\lim _{\mathfrak {M}\rightarrow \infty }H(\mathfrak {M})=-\infty\), then \(\mathfrak {M}\) exists and verifies \(H(\mathfrak {M})<0\). Therefore, at least one strictly positive solution is guaranteed for (6). Next, we show the uniqueness of \(S^0(x)\). We suppose that (6) has another solution \(\tilde{S}_0(x)\in \mathbb {C}(\bar{\Gamma })\backslash \{0\}\) such that \(\tilde{S}_0\not \equiv S^0\), which satisfies the problem.
From (6), we have \(b_3=-\delta _S \Delta S+\left( b_4+b_2-\varepsilon b_2 e^{-b_4\tau }\right) S^0(x)\), and by replacing this result into (7) and letting \(\bar{S}^0(x)=\tilde{S}^0(x)-S^0(x)\), we get
Clearly, the unique solution is given by \(\bar{S}^0(x)=0\). Hence, \(\tilde{S}^0(x)=S^0(x)\), \(x\in \bar{\Gamma }\). Then \(E^0\) is unique. The proof is completed \(\square\)
Existence of a Global compact attractor
Lemma 3
If \(S_0(s,x)\le S^0(x),~x\in \bar{\Gamma }\) and \({s\in {[-\tau ,0[}}\), then we have \(S(t,x)\le S^0(x)\) for all \(t\ge 0,~x\in \bar{\Gamma }\).
Proof
From (6), we have
Let \(\tilde{S}(t,x)=S^0(x)-S(t,x)\), \(t\ge 0\) and \(x\in \bar{\Gamma }\). Then,
We let \(\bar{S}(t,x)\) be the solution of the problem
Using similar reasoning as in Theorem 1, we get \(\bar{S}(t,x)\ge 0\) for all \(t\ge 0\) and \(x\in \bar{\Gamma }\). Standard comparison principle implies that \(\tilde{S}(t,x)\ge \bar{S}(t,x)\ge 0\), \(t\ge 0\) and \(x\in \bar{\Gamma }\). Therefore, \(S^0(x)\ge S(t,x)\), \(x\in \bar{\Gamma }\). We conclude the proof. \(\square\)
Let
and
Note that the positively invariant set of (5) is \(\Sigma\). Now, with the help of the next lemma, we will prove that \(\Sigma _0\) is also a positively invariant set.
Lemma 4
We suppose that (5) has a unique solution U(t, x) with \(U_0\in \Sigma _0\) then for all \(t>0\), \(x\in \bar{\Gamma }, ~I(t,x)>0\).
Proof
We consider the problem
Clearly, \(I(t,x)\ge \bar{I}(t,x)\), where \(\bar{I}(t,x)\) is the solution of (11). Now, we only need to prove that \(\bar{I}(t,x)>0\) for all \(t>0\) and \(x\in \bar{\Gamma }\). The inspiration for the proof comes from proof of39, Proposition 2.2]. We begin by defining \(P:\mathbb {C}(\bar{\Gamma })\rightarrow \mathbb {C}(\bar{\Gamma })\) as
Note that P is continuous and generates a uniformly continuous semigroup \(\{ e^{Pt}\}_{t\ge 0}\) which is also positive on \(\mathbb {C}(\bar{\Gamma })\), where we have \(e^{Pt}=\Sigma _{n=0} ^{\infty }\frac{t^n P^n}{n!}\) for \(t\ge 0\) . Moreover,
We have \(P^{n+1}(I_0(x))=\displaystyle \int _\Gamma J(x-y)P^n I_0(y)dy,\) for \(x \in \bar{\Gamma }\) and \(n\ge 1\) utilizing the fact that \(\bar{I}(t,x)\ne 0\). We deduce the existence of \(n_0\) with the iterative technique, verifying \(P^{n+1}(I(0,x))>0,~~x \in \bar{\Gamma }\) and \(n\ge n_0\). Thus, \(P^{n}(I_0(x))>0,~~x \in \bar{\Gamma }\). Therefore,
for \(t>0\), \(x\in \bar{\Gamma }\). \(\square\)
Now, we look into the asymptotic smoothness of the semigroup (check40, Definition 2.25]). We will now prove that \(\{\Theta (t)\}_{t\ge 0}\) (the semiflow) is compact. We first present the definition as given below:
Definition 1
41 Let \(g: X\rightarrow X\) be a continuous map. g is \(\varkappa -condensing\) if the bounded sets are mapped by g to the bounded sets and \(\varkappa (g(A))<\varkappa (A)(\varkappa (g(A))<l\varkappa (A))\) with \(0\le l<1\) for every closed bounded nonempty set \(A\in X\), with \(\varkappa (A)\) is Kuratowski measure that is \(\varkappa (A):=\inf \{r:\text {the finite cover of } A \text { has diameter~ <r }\}\). Therefore, \(\varkappa (A)=0\) if and only if A is precompact. Hence, the \(\varkappa -condensing\) maps exhibit asymptotic smoothness (check 42, Lemma 2.3.5]).
The following theorem gives the asymptotic smoothness of \(\{\Theta (t)\}_{t\ge 0}\) (the semiflow) by:
Theorem 3
Assume that either \(\delta _S\) or \(\delta _I\) is a zero, then \(\{\Theta (t)\}_{t\ge 0}\) (the semiflow) is \(\varkappa -condensing\). Furthhermore, there is a global compact attractor in \(\mathbb {X}_+\) for semiflow \(\{\Theta (t)\}_{t\ge 0}\).
Proof
We consider \(U_0=(S_0,I_0)\in \mathbb {X}_+\). The semiflow \(\{\Theta (t)\}_{t\ge 0}\) associated to (5) is \(\Theta (t)=(S(t,\cdot ),I(t,\cdot ))\).
-
If \(\delta _I=0\): In this case, the semiflow \(\{\Theta (t)\}_{t\ge 0}\) becomes non-compact. Clearly, the second equation of the system (5) can be expressed as
$$I(t,\cdot )= e^{-(b_4+b_5+b_6) t}I(0,\cdot )+b_1 \displaystyle \int _0 ^t e^{-(b_4+b_5+b_6) (t-s)}I(s,\cdot )S(s,\cdot )ds.$$With initial data \(U_0\in C(\Omega )\), we denote by \(S(t,x;U_0)\) (resp. \(I(t,x;U_0)\)), the solution of (5). By applying Arezela–Ascoli Theorem as43, Lemma 2.5], we deduce that for any bounded \(B\subset \textbf{X}_+\) and \(t>0\), the set
$$\mathcal {S}:=\left\{ \displaystyle \int _0 ^t e^{-(b_4+b_5+b_6) (t-s)}b_1 I(s,\cdot ;U_0)S(s,\cdot ;U_0)ds:U_0\in B \right\} ,$$is precompact in \(C(\bar{\Omega })\), and hence \(\varkappa (\mathcal {S})=0\). Next, we decompose our semiflow \(\Theta (t)\) as \(\Theta (t)=F_1(t)+F_2(t),\) \(t\ge 0\), where
$$F_1(t)U_0=\left( S(t,\cdot ;U_0),\displaystyle \int _0 ^t e^{-(b_4+b_5+b_6) (t-s)}b_1 I(s,\cdot ;U_0)S(s,\cdot ;U_0)ds \right) ,~~t\ge 0,$$and
$$F_2(t)U_0=\left( 0, e^{-(b_4+b_5+b_6) t}I(0,\cdot ) \right) ,~~t\ge 0.$$Let us suppose a bounded set \(B\subseteq \textbf{X}_+\). By Theorem 2, for any \(t>0\) the set \(\{F_1(s)B,s\in [0,t]\}\) is bounded. For any \(t>0\), \(F_1(t)B\) is precompact since \(\mathcal {S}\) is precompact in \(C(\bar{\Omega })\). Thus \(\varkappa (F_1(t)B)=0,~~t>0\). Moreover,
$$\varkappa (F_2(t)B)\le \Vert e^{-(b_4^-+b_5^-+b_6 ^-) t}\Vert \varkappa (B)\le e^{-(b_4^-+b_5^-+b_6 ^-) t}\varkappa (B),~~t\ge 0.$$Therefore,
$$\varkappa (\Theta (t)B)\le \varkappa (F_1(t)B)+\varkappa (F_2(t)B)\le \kappa (t)\varkappa (B).$$where \(\kappa (t)= e^{-(b_4^-+b_5^-+b_6 ^-) t}\), which means that \(\Theta (t)\) is a \(\varkappa -contraction\).
-
If \(\delta _S=0\): Here, the semiflow \(\{\Theta (t)\}_{t\ge 0}\) is also non-compact. Clearly the first equation of the system (5) can be expressed as
$$S(t,\cdot )= e^{-(b_4+b_2) t}S_0+\displaystyle \int _0 ^t e^{-(b_4+b_2) (t-s)}\Bigg [b_3-b_1 I(s,\cdot )S(s,\cdot )+ \varepsilon b_2 e^{-b_4\tau } S(t-\tau ,\cdot ) \bigg ]ds.$$Similarly, the Arezela–Ascoli Theorem implies that for any bounded \(B\subset \textbf{X}_+\) and \(t>0\), the set given by
$$\mathcal {S}_1:=\left\{ \displaystyle \int _0 ^t e^{-(b_4+b_2) (t-s)}\Bigg [b_3-b_1 I(s,\cdot ;U_0)S(s,\cdot ;U_0)+ \varepsilon b_2 e^{-b_4\tau } S(t-\tau ,\cdot ;U_0) \bigg ]ds:U_0\in B \right\} ,$$is precompact in \(C(\bar{\Omega })\), and hence \(\varkappa (\mathcal {S}_1)=0\). Again, we decompose our semiflow \(\Theta (t)\) as \(\Theta (t)=F_1(t)+F_2(t),\) \(t\ge 0\), where
$$F_1(t)U_0=\left( \displaystyle \int _0 ^t e^{-(b_4+b_2) (t-s)}\Bigg [b_3-b_1 I(s,\cdot ;U_0)S(s,\cdot ;U_0)+ \varepsilon b_2 e^{-b_4\tau } S(t-\tau ,\cdot ;U_0) \bigg ]ds,I(t,\cdot ;U_0) \right) ,$$and
$$F_2(t)U_0=\left( e^{-(b_4+b_2) t}S(0,\cdot ), 0 \right) ,$$for \(t\ge 0.\) We suppose another bounded set \(B_1\subseteq \textbf{X}_+\). Therefore, for any positive t, the set \(\{F_1(s)B_1, s\in [0,t]\}\) is bounded. Moreover, for any \(t>0\), \(F_1(t)B_1\) is precompact. Thus \(\varkappa (F_1(t)B_1)=0,~~t>0\). Furthermore,
$$\varkappa (F_2(t)B_1)\le \Vert e^{-(b_4^-+b_2^-) t}\Vert \varkappa (B_1)\le e^{-(b_4^-+b_2^-) t}\varkappa (B_1),~~t\ge 0.$$Therefore,
$$\varkappa (\Theta (t)B_1)\le \varkappa (F_1(t)B_1)+\varkappa (F_2(t)B_1)\le \kappa _1(t)\varkappa (B_1).$$with \(\kappa _1(t)= e^{-(b_4^-+b_2^-) t}\). Thus, the first part of the proof is finished.
We will now proceed with the final segment of our proof. From Theorem 1–2, we infer that the global solution of (5) exists and is unique. Since \(\Sigma\) defined by (10) is a positively invariant set, the semiflow \(\Theta (t),~t\ge 0\) is point dissipative. If neither \(\delta _S\) nor \(\delta _I\) is a zero then the semiflow is compact, and consequently, the semigroup \(T(t),~~t\ge 0\) is completely continuous, and by42, Corolary 3.2] it is asymptotically smooth. However, if either \(\delta _S\) or \(\delta _I\) is a zero, then the semiflow \(T(t),~~t\ge 0\) is not compact, but it is \(\varkappa -\)condensing, by applying42, Lemma 3.2.5], we deduce the asymptotic smoothness of \(T(t),~~t\ge 0\). Therefore,42, Theorem 3.4.6] implies a global compact attractor. \(\square\)
Basic reproduction number
In (5), equation number two is linearized at IFEs, resulting in the governing equation of the infection component
for \(t>0\) and \(x \in \bar{\Gamma }\). Considering \(\mathfrak {F}\) (the linear operator) defined on \(\mathbb {C} (\bar{\Gamma })\) by
and the linear operator \(A_I\) defined by
We can write (12) in the abstract form in \(\mathbb {C} (\bar{\Gamma })\) with the help of the operator \(A_{I}\) as follows:
Observe \(s(A_{I})<0\) represents that \(A_{I}\) is resolvent-positive,. Thus,
We present the next generation operator \(\chi :=\mathfrak {F}(-A_{I})^{-1}\) (see44) as follows:
\(\mathfrak {R}_0\) representing the basic reproduction number is given by
Where spectral radius r belongs to the operator. Inspired by45, the eigenvalue problem associated to the problem (12) is
Based on the fact that \(b_1 S^0(x)-(b_4+b_5+b_6)\) is Lipschitz on \(\bar{\Gamma }\) corresponding to the eigenfunction \(v_0(x)>0\), we get the principal eigenvalue of (13) denoted by \(\mu _0\) (see46) where
Based on the definition of \(\mu _0\), we have \(\mu _0=s(A_I+\mathfrak {F})\). Since that \(A_I\) is resolvent-positive and \(s(A_I)<0\), we have \(sign \{s(A_I+\mathfrak {F})\}=sign\{r(\mathfrak {F}(-A_I ^{-1}))-1\}\). Consequently, \(sign\{\mu _0\}=sign\{\mathfrak {R}_0-1\}\).
By applying46, Theorem 1.4], we obtain that the following expression
defines the the variational expression of the basic reproduction number.
Remark 2
Clearly, \(R_0\) goes to 0 as \(\delta _I\) tends to \(+\infty\). Therefore, we deduce that diffusion can contain the epidemic.
IFEs
To our interest, we will now show the global stability of the IFEs that is \(E^0(S^0(x),0),~x\in \bar{\Gamma }\) in the following section. The next theorem presents the results we have obtained.
Theorem 4
IFEs are globally asymptotically stable for \(\mathfrak {R}_0<1\) in \(\Sigma\).
Proof
We choose a Lyapunov function given below to begin with
with \(v_0(x)\) corresponding to \(mu_0\) is a strictly positive eigenfunction. Clearly, \(L_1\ge 0\) and \(L_1=0\) if and only if \(I\equiv 0\). Therefore, we perform the derivation of \(L_1\) in the following manner:
with \(\tilde{J}=\int _\Gamma J(x-y)dy\) Note that
Then, \(\frac{d}{dt}L_1(t)\) becomes
For \(\mathfrak {R}_0<1\), we have \(\mu _0<0\), then \(\frac{d}{dt}L_1(t)\le 0\), and based on the fact that \(v_0(x)>0\), \(x\in \bar{\Gamma }\), we get if \(I(t,x)=0\) then \(\frac{d}{dt}L_1(t)=0\) and vice versa. Therefore, \(I\rightarrow 0\) as \(t\rightarrow \infty\). Hence, for all \(\vartheta >0\) (we choose it to be sufficiently small) there is \(t_1>0\) (sufficiently large), such that for all \(t>t_1\) we have \(I(t,x)<\vartheta\) in \(\Gamma\). Therefore, for \(t>t_1\), we have \(S(t,x)\le \hat{S}(t,x)\), where \(\hat{S}\) is the unique solution of the following problem
with initial condition belongs to \(\Sigma\). We claim that \(\hat{S}\rightarrow \hat{S}^0\), with \(\hat{S}^0\) is the unique positive solution of the elliptic problem
then, by (16), we get
Suppose \(\hat{S}^0(x)-\hat{S}= \tilde{S}(t,x)\), \(t\ge t_2>t_1,~x\in \bar{\Gamma }\), with \(t_2\) is sufficiently large. Then,
Therefore, the problem outlined below
has a solution \(\tilde{S}(t,x)\). We are now going to prove that as \(t\rightarrow \infty\), \(\tilde{S}(t,x)\) goes to 0. Let us consider the eigenvalue problem given below:
has principal eigenvalue \(\lambda _0=0\), and \(\psi (x)\) is the corresponding eigenfunction which is strictly positive in \(\Gamma\). Now, taking the eigenvalue problem corresponding to (17) into consideration:
with \(\phi (x)\) is also positive on \(\Gamma\). Now we multiply (18) by \(\phi\) and (19) by \(\psi\) and add them, then integrate by parts on \(\Gamma\) which gives
We assume that \(\lambda ^*>0\). We get that \(e^{-\lambda ^*\tau }-1<0\), which leads to a contradiction as it implies opposite signs on the right-hand side (negative) and the left-hand side (positive). Therefore, \(\lambda ^*<0\). By supposing that \(\tilde{S}(t,x)= e^{\lambda ^*(t-t_0)}\phi (x)\), with \(t_0\) sufficiently large, we get \(\tilde{S}(t,x)\) goes to 0 as \(t\rightarrow \infty\). Similarly, we can show that for \(t>t_1\) we have \(I(t,x)>-\vartheta\) in \(\Gamma\) (with \(\vartheta\) is chosen very small as necessary). \(S(t,x)\ge \breve{S}(t,x)\), where \(\breve{S}\) is the unique solution of the following problem
with initial condition belongs to \(\Sigma\). We obtain that \(\breve{S}\rightarrow \breve{S}^0\), with \(\breve{S}^0\) solves
Then we obtain that
Because \(\vartheta\) deduces that the solution is continuous, we let \(\vartheta \rightarrow 0\), which implies that \(S(t,x)\rightarrow S^0\). Then, in \(\Sigma\), \(E_0\) is globally stable, and that concludes the proof. \(\square\)
IEs
This section analyzes for \(\mathfrak {R}_0>1\), the behavior of the solution of (5). For this aim, we put the following subsections.
To facilitate our the notations, we are using \(S_X=S(t,x)\) and \(S_{\tau ,x}=S(t-\tau ,x)\), and \(I_x=I(t,x)\).
Uniform persistence
Definition 2
Let \(\zeta\) be a sufficiently small positive number. If this \(\zeta\) exists such that it verifies for any \(U_0\in \mathbb {X}_+\), \(U(t,U_0)\) satisfies
then we have a uniformly persistent system given by (5).
We give the definition of the spaces as follows:
To show this result, we need to verify all axioms of40, Theorem 3] through the following steps:
Step 1: Global stability of \(E^0\) for semiflow \(\{\Theta (t)\}_{t\ge 0}\) is restricted to \(\partial \Sigma _0\).
Clearly, \(\partial \Sigma _0\) and \(\Sigma _\partial\) are positively invariant sets (see Lemma 4). Next, we show that the semiflow \(\{\Theta (t)\}_{t\ge 0}\) restricted to \(\partial \Sigma _0\) has globally asymptotically stable IFEs for initial condition belonging to \(\Sigma _\partial\). In this case, S is governed by the equation
We take the following Lyapunov function into consideration:
with
and
Here, h represents a Volterra function defined as \(h(x)=x-1-\ln x\). The problem (22) along with the derivative of \(\tilde{L}_1(t)\) is
Now, we calculate \(\frac{d }{d t}\tilde{L}_2(t)\) which is given as
Note that
thus, we get
Hence,
Now, it remains to show that
Using Green’s first identity and Neuman boundary conditions, we get
Therefore, \(\frac{d }{d t}\tilde{L}(t)\) is non-positive. The equality holds iff \(S_{\tau ,x}=S_x=S^0(x)\), \(x\in \bar{\Gamma }\). Thus, we obtain a globally stable \(E^0\) in \(\partial \Sigma _0\) for \(\mathfrak {R}_0>1\).
Step 2: Uniform weak repeller.
Here, we will show that \(\Sigma\) has a uniform weak repeller, the IFEs. Hence, we need to show that a sufficiently small positive constant denoted by \(l>0\) exists in a way that the semiflow \(\{\Theta \}_{t\ge 0}\) will satisfy
This result will be shown by contradiction. We assume that \(\limsup _{t\rightarrow \infty }\Vert \Theta (t,U_0)-E^0\Vert \le l\). Then \(\exists t_1\) so that the solution \(U(t,U_0)\) verifies
Since that \(\mathfrak {R}_0>1\), \(l_1\) denoting a sufficiently small constant, exists and satisfies \(I(t_1,x)>l_1v_0(x)\) with \(v_0(x)\in X_+\). Note, \((\mu _0,v_0)\) is the eigenvalue and corresponding eigenfunction which verifies the following problem:
Hence, for the problem given below, we consider \(\tilde{I}(t,x)\) as a solution.
with \(t>t_1,~~x \in \Gamma ,\) Therefore,
Since \(\mu _0\) is positive for \(\mathfrak {R}_0>1\), as \(t\rightarrow \infty\) we get \(\Vert I_x\Vert \rightarrow \infty\) contradicting our supposition.
Step 3: Uniform persistence.
Taking the assumption that the orbit \(\gamma ^+(U_0):=\bigcup _{t\ge 0}\{\Theta (t)\}\) has \(\omega (U_0)\) as the \(\omega -limit\) set. Moreover, \(\Theta (t,\Sigma _0)\subseteq \Sigma _0\) and \(\Theta (t,\partial \Sigma _0)\subseteq \partial \Sigma _0\) are obtained. Therefore, \(\Sigma _\partial =\partial \Sigma _0\), and \(\omega (U_0)=E^0\) for every \(U_0\in \partial \Sigma _0\). Hence, \(E^0\) is isolated in \(\mathbb {X}\). Since \(\omega (U_0)=E^0\) for all \(U_0\in \partial \Sigma _0\), then there is no cycle in \(\partial \Sigma _0\) from \(E_0\) to \(E_0\).
From the results of step 2, we get \(W^s(E^0)\bigcap \Sigma _0=\emptyset\), with \(W^s(E^0)=\{U_0\in X:~~\lim _{t\rightarrow \infty }\Theta (t,U_0)=E^0\}\). Therefore, the system (5) is uniformly persistent for \(\mathbb {R}_0>1\) as all axioms mentioned in40, Theorem 3] holds. The proof is completed.
Existence of IEs
Theorem 5
The system admits at least one IEs whenever \(\mathfrak {R}_0>1\).
Proof
We have obtained the point dissipativeness of semiflow \(\Theta (r,U_0)\) from theorem 2. Also, Theorem 3 guarantees that there exists an attractor that is globally compact and attracts all points from \(\Sigma _0\). Since \(\Sigma _0\) is convex and \(\{\Theta (r)\}_{r\ge 0}\) (the semiflow) is \(\varkappa -\)condensing (see Theorem 3), \(\{\Theta (r)\}_{r\ge 0}\) has a steady state \(E^*=(S^*,I^*)\in \Sigma _0\) by47, Theorem 4.7]. Moreover, the persistence result shows that (5) has a strictly positive solution, i.e., the IEs, which verifies the following mix elliptic problem:
\(\square\)
Global attractivity of IEs
Next, we investigate whether the IEs are globally attractive using Lyapunov functions. Here, we consider the method of constructing these Lyapunov functions through the following cases:
\({\delta _S=0~~ and ~~\delta _I>0}\)
In this case, the following Lyapunov functional is taken into consideration:
with
The t-derivative of \(L_1(t)\) is
Using the IEs property, which is
we get
Now, we calculate \(\frac{d }{d t}\tilde{L}_2(t)\), which is given as
Note that
Thus, we get
Therefore, \(\frac{d }{d t}\tilde{L}(t)\) becomes
Now, we put
We then obtain M(t) by changing the order of integration
Therefore, \(\frac{d }{d t}\tilde{L}(t)\le 0\). Moreover, \(\frac{d }{d t}\tilde{L}(t)=0\) gives \(I_x=I^*(x)\) and \(S_{\tau ,x}=S\), \(S_x=S^*(x)\) for \(x\in \bar{\Gamma }\). Thus, we conclude that \((S^*,I^*)\) is globally attractive in \(\Sigma _0\). Uniqueness is obtained directly as a result of the uniqueness of the limit.
\({\delta _S>0~~ and ~~\delta _I=0}\)
In this case, we work with the following Lyapunov functional:
with
Differentiating \(\bar{L}_1(t)\) by time, we get
The positive equilibrium state verifies
We get
Now, we calculate \(\frac{d }{d t}\bar{L}_2(t)\), which is given as
By summing \(\frac{d }{d t}\bar{L}_1(t)\) and \(\frac{d }{d t}\bar{L}_2(t)\) we obtain
Now, We handle the last term using Neuman boundary conditions and the Green’s first identity. Thus, we get
Therefore, \(\frac{d }{d t}\bar{L}(t)\le 0\). Moreover, \(\frac{d }{d t}\bar{L}(t)=0\) gives \(I_x=I^*(x)\) and \(S_{\tau ,x}=S^*(x)\), and \(S_x=S^*(x)\) for \(x\in \bar{\Gamma }\). It adheres to \((S^*,I^*)\) being globally attractive in \(\Sigma _0\). We obtain the uniqueness through the uniqueness of the limit directly.
All parameters are constants and \({\delta _S>0~~ and ~~\delta _I>0}\)
In this case, we suppose that the model parameters are constant for all \(x\in \bar{\Omega }\). In this case, \(R_0\) becomes
and the IEs satisfies
For the global attractivity of this steady state, we consider the following Lyapunov functional:
with
Differentiating \(\hat{L}_1(t)\) with respect to t, we obtain
Using the equilibrium equations (28), to obtain
Next, we deal with the term \(\displaystyle \int _\Omega \left( 1-\frac{I^* }{I_x} \right) \mathbb {H}[I](t,x)dx\), we obtain
Now, we calculate \(\frac{d }{d t}\hat{L}_2(t)\), which is given as
By summing \(\frac{d }{d t}\bar{L}_1(t)\) and \(\frac{d }{d t}\bar{L}_2(t)\) we obtain Therefore, \(\frac{d }{d t}\tilde{L}(t)\) becomes
Therefore, \(\frac{d }{d t}\hat{L}(t)\le 0\). Moreover, equality holds if and only if\(I_x=I^*\) and \(S_{\tau ,x}=S^*\), and \(S_x=S^*\) for \(x\in \bar{\Gamma }\). It adheres to \((S^*,I^*)\) being globally attractive in \(\Sigma _0\).
Remark 3
In the foregoing analysis, we have examined two limiting cases: (i) the case of purely local diffusion, where \(\delta _S > 0\) and \(\delta _I = 0\), and (ii) the case of purely nonlocal diffusion, where \(\delta _S = 0\) and \(\delta _I > 0\). These cases were considered in order to separately assess the individual effects of each dispersal mechanism on the global dynamics of the system. Nonetheless, the general case in which both \(\delta _S > 0\) and \(\delta _I > 0\) holds is more biologically realistic and theoretically intricate.
It is important to emphasize that, in the local diffusion case, the Lyapunov functional is constructed using a test function of the form \(S^*(x)\), which appears as the integrand weight in the functional \(\bar{L}(t)\). Conversely, in the nonlocal diffusion case, the corresponding test function is \(I^*(x)\), associated with the integral expression \(L(t)\). In the general setting with both local and nonlocal dispersal, the principal difficulty lies in identifying an admissible test function that ensures the non-positivity of the time derivative of the Lyapunov functional.
Under the additional simplifying assumption that all model parameters are constant, the optimal test function can be chosen to be the constant function \(1\) (or any other strictly positive constant), which significantly facilitates the analysis. However, in the fully general case with spatially heterogeneous coefficients, the construction of a suitable Lyapunov functional or test function remains an open and challenging problem.
Relationship between local and corresponding nonlocal diffusion
A given nonnegative bounded function \(K\in L^1(\mathbb {R}^N)\) with \(N\ge 1\), and \(supp K\subset \overline{B(0,1)}\), \(\displaystyle \int _{\mathbb {R}^N} K(x)dx=1.\) For every \(\xi >0\), we define
The function \(K_\xi (x)\) is called modifiers. A function \(\vartheta \in L_{loc} ^1(\Gamma )\), we define \(\vartheta _\xi\) as
with \(y\in \Gamma _\xi := \{x\in \Gamma :dist(x,\partial \Gamma )>\xi \}.\) The function \(\vartheta _\xi :\Gamma _\xi \rightarrow \mathbb {R}\) is called a mollification function of \(\vartheta\).
We consider that J(.) takes the form \(J(x)=\frac{1}{\xi }K_\xi (\frac{x}{\xi })\) with \(0<\xi<<1\), \(supp K \subset [-1,1]\) and \(N=1\). We have the Taylor’s formula given by
is obtained due to the smoothness of I, with \(\Delta =\frac{\partial ^2}{\partial x^2}\), \(D_1=\frac{\xi ^2}{2}\displaystyle \int _\mathbb {R} K_\xi (-s)s^2ds\), and \(D_2=\xi \displaystyle \int _\mathbb {R} K_\xi (-s)sds\). Obviously, if \(D_2=0\), the nonlocal diffusion becomes the corresponding local diffusive one. Then, the nonlocal diffusion generalizes the results of the local diffusion.
The situation of the epidemic influenced by the protection force
This section will discuss the protection force required to reduce the \(\mathfrak {R}_0\) defined by (40) to a value less than one. In the case of \(\mathfrak {R}_0<1\), the global stability of \(E^0\) (which is the target result) is obtained. The focal point of this section is to suppose that the basic reproduction number corresponding to SIR epidemic model (denoted by \(\mathfrak {R}_0 ^{SIR}\)) is larger than one and seeking condition on the protection force \(b_2\) such that \(\mathfrak {R}_0\) becomes less than one, where in this case we get the global extinction of the disease. Consider the basic reproduction number corresponding to the SIR epidemic model, which is obtained by taking \(b_2=0\) in (40), as follows:
where the following elliptic problem:
has a solution \(S^0 _{SIR}(x)\). By a simple comparison principle, we get \(S^0 _{SIR}(x)\ge S^0 (x)\), \(x\in \bar{\Gamma }\). Therefore, we get \(\mathfrak {R}_0 ^{SIR}\ge \mathfrak {R}_0\). The corresponding elliptic problem to (30) is
where \(\psi _1>0\) that corresponds to the principal eigenvalue \(\mathfrak {R}_0 ^{SIR}\). Similarly, the corresponding eigenfunction to \(\mathfrak {R}_0\) is \(\psi _2\), which is strictly positive and verifies the following problem:
By multiplying (32) by \(\psi _2\) and (33) by \(\psi _1\) and summing them, and then integrating the obtained equation over \(\Gamma\), we get
Hence,
which is the relationship between the \(\mathfrak {R}_0\) and \(\mathfrak {R}_0 ^{SIR}\). By considering \(\mathfrak {R}_0<1\) (and taking into consideration \(\mathfrak {R}_0 ^{SIR}>1\)), we get
It can be observed that the right-hand side of (34) has no protection force \(b_2\) (for more details, see the elliptic equation (31)). Therefore, we get \(\mathfrak {R}_0<1\) whenever \(b_2\) verifies the inequality (34), indicating that the protection measure controls the epidemic.
For more explanation, we consider the particular case \(\delta _S=0\) and \(b_2=\tilde{b_2}>0\). In this case, we obtain
and
hence, the inequality (34) becomes \(F(\tilde{b_2})<\frac{\tilde{F}}{\mathfrak {R}_0 ^{SIR}}\), with
Notice that \(\tilde{F}\) is constant with respect to \(\tilde{b_2}\). Clearly, F is a decreasing function in \(\tilde{b_2}\) and \(F(0)=\tilde{F}\), and based on the fact that \(\mathfrak {R}_0 ^{SIR}>1\), we have \(F(0)>\frac{\tilde{F}}{\mathfrak {R}_0 ^{SIR}}\). Since \(\lim _{\tilde{b_2}\rightarrow \infty }F(\tilde{b_2})=0\), we infer that \(\exists\) \(\tilde{b_2}_{\min }>0\) such that \(F(\tilde{b_2}_{min})=\frac{\tilde{F}}{\mathfrak {R}_0 ^{SIR}}\). Moreover, for \(\tilde{b_2}<\tilde{b_2}_{min}\) the inequality (34) is not verified (means \(\mathfrak {R}_0>1\)), and for \(\tilde{b_2}>\tilde{b_2}_{min}\), the inequality (34) holds (means \(\mathfrak {R}_0<1\)). Therefore, we deduce that the protection can help in stopping the disease.
Remark 4
In our model, the time delay \(\tau\) represents the duration of the protection period gained by fear from infection. When \(\tau\) tends to \(\infty\), the term \(e^{-b_4 \tau }\) tends to zero. Consequently, \(S^0\) tends to \(\tilde{S}^0\) as \(\tau \rightarrow \infty\). By the comparison principle, we have that
Substituting this estimate into the variational formulation of the basic reproduction number \(R_0\), by following the aforementioned methodology, shows that the delay influences \(R_0\). However, the reduction remains modest, since \(0< e^{-b_4 \tau } < 1\) and its influence on the principal eigenvalue is limited.
Numerical investigation of the results
We let \(\Gamma =(-1,1)\) and
where \(Z\approx 2.2523\). Note that J fulfills (A4) and its graphical representation over \(\Gamma\) is shown in Fig. 1

The nonlocal diffusion kernel J(x).
Now, we test the theoretical results in the subsections given below.
Stability of IFEs
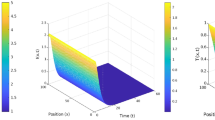
This subsection is meant to check the results of section “IFEs”. Therefore, let us take the parameters into consideration that are given below:
Then we get \(\mathfrak {R}_0\approx 0.783\), showing that \(E^0\) is globally asymptotically stable, as it is depicted in Fig. 2

Global asymptotic stability of IFEs for the set of parameters (35). Therefore, \(\mathfrak {R}_0\approx 0.783\).
Global asymptotic stability of the IEs
In Section “IEs”, the global asymptotic stability of the IEs has been shown in two cases:
-
\(\mathbf {\delta _S=0~~ and ~~\delta _I>0}\).
-
\(\mathbf {\delta _S>0~~ and ~~\delta _I=0}\).
For this aim, we consider the subsections:
\({\delta _S=0~~ and ~~\delta _I>0}\)
We take the following set of parameters:
Thus, a IEs that is globally asymptotically stable is obtained, where \(\mathfrak {R}_0\approx 1.543\) as highlighted in Fig. 3

The globally asymptotically stable IEs \((S^*(x),I^*(x))\) with the set of parameters (36). Therefore, \(\mathfrak {R}_0\approx 1.543\).
\({\delta _S>0~~ and ~~\delta _I=0}\)
We take similar parameters (36) and the following values:
Thus, for the given case, a IEs is globally asymptotically stable is obtained, where \(\mathfrak {R}_0\approx 1.72\) as highlighted in Fig. 4

The IEs \((S^*(x),I^*(x))\) is globally stable for the set of parameters (36), where \(\mathfrak {R}_0\approx 1.72\).
Required protection force to contain the epidemic
This section determines the protection force required to stop the epidemic, which is studied in section “The situation of the epidemic influenced by the protection force”. The set of parameters given below is taken into consideration:
And we assume that \(b_2\) takes the form
Indeed, for \(\alpha _0=0\), we get the results obtained by the classical SIR epidemic model. We hope that by augmenting the value of \(\alpha _0\), we will reach the desired protection force required to stop the epidemic. That means the inequality (34) holds, which means that the IFEs become globally asymptotically stable. For these regards, we plot Fig. 5.

The effect of protection function \(b_2\) on stopping the epidemic for the set of parameters (39), where for \(\alpha _0=0.2\), we get \(\mathfrak {R}_0\approx 1.78\) and for \(\alpha _0=2.6\), we get \(\mathfrak {R}_0\approx 0.89\). Clearly, the situation forwards from the epidemic for \(\alpha _0=0.2\) to the extinction of disease for \(\alpha _0=2.6\).
Effect of the kernel J on the basic reproduction number
Motivated by the work in27, we consider the following examples of the kernel function \(J\), all of which satisfy assumption (A4):
These kernel functions are depicted graphically in Fig. 6.

Comparison of different types of the kernel function \(J\).
We consider the following set of parameters:
Moreover, we assume that \(b_1\) takes the spatially heterogeneous form
and the corresponding equilibrium value \(S^0\) is given by
Accordingly, the variational formulation of the basic reproduction number reads
By evaluating the expression (40) numerically for each of the five kernels, we obtain the following values for \(\mathfrak {R}_0\):
-
Gaussian kernel: \(\mathfrak {R}_0 = 2.2520\),
-
Laplace kernel: \(\mathfrak {R}_0 = 1.9085\),
-
Epanechnikov kernel: \(\mathfrak {R}_0 = 2.3571\),
-
Triangular kernel: \(\mathfrak {R}_0 = 2.4500\),
-
Raised cosine kernel: \(\mathfrak {R}_0 = 2.3853\).
These results highlight the significant impact of the kernel function \(J\) on the value of the basic reproduction number, and thus on the underlying dynamics of the epidemic model.
Conclusion
The fear of the spread of infection always resides globally because of its effective transmission from the infected population to the susceptible ones. Although a small number of individuals are prone to get infected as fear grows, we need to find some methodologies that can reduce the spread of any infectious disease by minimizing the transmission of infection. In this paper, we have introduced a novel SPIR epidemic model that couples mathematical modeling of the infectious disease and the impact of its induced fear on the social interactions and behavior changes in the population by providing protection as a safety measure against all odds. Moreover, it contains both local and nonlocal diffusions and investigates the effect of fear on the mobility of the population by taking \(\delta _1=0\) and \(\delta _2=0\), one at a time.
We proved that this SPIR model is well-posed and has a globally defined solution. The existence of a global compact attractor in \(\mathbb {X}_+\) is strongly supported by the fact that the semiflow given by \(\{\Theta (t)\}_{t\ge 0}\) is \(\varkappa -\)condensing map. For the threshold quantity \(\mathfrak {R}_0\), we have obtained the global extinction of the disease, i.e., the IFEs are globally asymptotically stable for \(\mathfrak {R}_0 <1\). The global persistence of the disease, i.e., the SPIR model under consideration, is uniformly persistent for \(\mathfrak {R}_0 >1\) and has an IE that is \(E^*\).
We have further found the required minimal protection rate \(b_{2min}\) which is needed to stop the epidemic by reducing the \(\mathfrak {R}_0\) below one in accordance with the assumption \(\mathfrak {R}^{SIR}_0 >1\). In the last part of the paper, we illustrated our findings by numerical simulation that shows that the disease eventually dies out by protecting a precise portion of the healthy population.
We strongly urge that the study in this paper can help investigate the spread, transmission, fear rate, and the minimum protection needed for contagious infections from a very small scale to a large scale, such as COVID-19 disease. Although protection may vary from one disease to another, it is still needed to stop the disease. The most commonly used measures include isolation, vaccination, or confinement, which can affect the findings under consideration.
Data Availability
The datasets used and/or analysed during the current study available from the corresponding author on reasonable request.
References
Mpeshe, S. C., Nyerere, N. et al. Modeling the dynamics of coronavirus disease pandemic coupled with fear epidemics. Comput. Math. Methods Med.2021 (2021).
Mitrasinovic, M. Agoraphobia: New York City public space in the time of COVID-19. J. Public Space 5(3), 83–90 (2020).
Epstein, J. M., Parker, J., Cummings, D. & Hammond, R. A. Coupled contagion dynamics of fear and disease: Mathematical and computational explorations. PLoS ONE 3(12), e3955 (2008).
Valle, S. Y. D., Mniszewski, S. M. & Hyman, J. M. Modeling the impact of behavior changes on the spread of pandemic influenza. In Modeling the Interplay Between Human Behavior and the Spread of Infectious Diseases, 59–77. (Springer, 2013)
Duan, X., Yuan, S. & Li, X. Global stability of an SVIR model with age of vaccination. Appl. Math. Comput. 226, 528–540 (2014).
Dubey, B., Dubey, P. & Dubey, U. S. Role of media and treatment on an SIR model. Nonlinear Anal. Model. Control 21(2), 185–200 (2016).
Zakary, O., Rachik, M. & Elmouki, I. On the impact of awareness programs in HIV/AIDS prevention: An SIR model with optimal control. Int. J. Comput. Appl. 133(9), 1–6 (2016).
Zhao, M. & Zhao, H. Asymptotic behavior of global positive solution to a stochastic SIR model incorporating media coverage. Adv. Differ. Equ. 2016(1), 1–17 (2016).
Bentout, S., Tridane, A., Djilali, S. & Touaoula, T. M. Age-structured modeling of covid-19 epidemic in the USA, UAE and Algeria. Alex. Eng. J. 60(1), 401–411 (2021).
Djilali, S., Loumi, A., Bentout, S., Sarmad, G. & Tridane, A. Mathematical modeling of containing the spread of heroin addiction via awareness program. Math. Methods Appl. Sci. 48(4), 4244–4261 (2025).
Mezouaghi, A., Djillali, S., Zeb, A. & Nisar, K. S. Global properties of a delayed epidemic model with partial susceptible protection. Math. Biosci. Eng. 19(1), 209–224 (2022).
Adimy, M., Chekroun, A. & Ferreira, C. P. Global dynamics of a differential-difference system: A case of kermackmckendrick sir model with age-structured protection phase. Math. Biosci. Eng. 17(2), 1329–1354 (2020).
Ding, W., Huang, W. & Kansakar, S. Traveling wave solutions for a diffusive SIS epidemic model. Discrete Contin. Dyn. Syst. Ser. B 18, 1291–1304 (2013).
Han, S. & Lei, C. Global stability of equilibria of a diffusive SEIR epidemic model with nonlinear incidence. Appl. Math. Lett. 98, 114–120 (2019).
Kuniya, T. & Wang, J. Global dynamics of an SIR epidemic model with nonlocal diffusion. Nonlinear Anal. Real World Appl. 43, 262–282 (2018).
Liu, L., Xu, R. & Jin, Z. Global dynamics of a spatial heterogeneous viral infection model with intracellular delay and nonlocal diffusion. Appl. Math. Model. 82, 150–167 (2020).
Chen, X. & Cui, R. Global stability in a diffusive cholera epidemic model with nonlinear incidence. Appl. Math. Lett. 111, 106596 (2021).
Li, H., Peng, R. & Wang, F.-B. Varying total population enhances disease persistence: Qualitative analysis on a diffusive SIS epidemic model. J. Differ. Equ. 262(2), 885–913 (2017).
Kang, H. & Ruan, S. Mathematical analysis on an age-structured SIS epidemic model with nonlocal diffusion. J. Math. Biol. 83(1), 5 (2021).
Zhen, Z., Wei, J., Zhou, J. & Tian, L. Wave propagation in a nonlocal diffusion epidemic model with nonlocal delayed effects. Appl. Math. Comput. 339, 15–37 (2018).
Zhao, M., Zhang, Y., Li, W.-T. & Du, Y. The dynamics of a degenerate epidemic model with nonlocal diffusion and free boundaries. J. Differ. Equ. 269(4), 3347–3386 (2020).
Kuniya, T. & Wang, J. Lyapunov functions and global stability for a spatially diffusive SIR epidemic model. Appl. Anal. 96(11), 1935–1960 (2017).
Andreu-Vaillo, F. Nonlocal diffusion problems, no. 165. (American Mathematical Society, 2010).
Coville, J. On a simple criterion for the existence of a principal eigenfunction of some nonlocal operators. J. Differ. Equ. 249(11), 2921–2953 (2010).
García-Melián, J. & Rossi, J. D. On the principal eigenvalue of some nonlocal diffusion problems. J. Differ. Equ. 246(1), 21–38 (2009).
Hu, S.-K. & Yuan, R. Asymptotic profiles of a nonlocal dispersal SIS epidemic model with Neumann boundary condition. J. Math. Anal. Appl. 530(2), 127710 (2024).
Wu, P., Zheng, S. & He, Z. Evolution dynamics of a time-delayed reaction–diffusion HIV latent infection model with two strains and periodic therapies. Nonlinear Anal. Real World Appl. 67, 103559 (2022).
Bentout, S., Djilali, S., Kuniya, T. & Wang, J. Mathematical analysis of a vaccination epidemic model with nonlocal diffusion. Math. Methods Appl. Sci. 46(9), 10970–10994 (2023).
Breda, D., De Reggi, S. & Vermiglio, R. A numerical method for the stability analysis of linear age-structured models with nonlocal diffusion. SIAM J. Sci. Comput. 46(2), A953–A973 (2024).
Li, Z. & Zhao, X. Q. Global dynamics of a time-delayed nonlocal reaction–diffusion model of within-host viral infections. J. Math. Biol. 88(3), 38 (2024).
Wang, R. & Du, Y. Long-time dynamics of an epidemic model with nonlocal diffusion and free boundaries: Spreading speed. Discrete Contin. Dyn. Syst. Ser. A43(1) (2023).
Wu, P., Wang, X. & Wang, H. Threshold dynamics of a nonlocal dispersal HIV/AIDS epidemic model with spatial heterogeneity and antiretroviral therapy. Commun. Nonlinear Sci. Numer. Simul. 115, 106728 (2022).
Wu, P. & Zhao, H. Dynamical analysis of a nonlocal delayed and diffusive HIV latent infection model with spatial heterogeneity. J. Franklin Inst. 358(10), 5552–5587 (2021).
Yang, G., Yao, S. & Wang, M. An SIR epidemic model with nonlocal diffusion, nonlocal infection and free boundaries. J. Math. Anal. Appl. 518(2), 126731 (2023).
Liu, J. & Zhang, T. Global behaviour of a heroin epidemic model with distributed delays. Appl. Math. Lett. 24(10), 1685–1692 (2011).
Pazy, A. Semigroups of Linear Operators and Applications to Partial Differential Equations Vol. 44 (Springer, 2012).
Engel, K.-J., Nagel, R. & Brendle, S. One-Parameter Semigroups for Linear Evolution Equations Vol. 194 (Springer, 2000).
Webb, G. F. Theory of Nonlinear Age-Dependent Population Dynamics (CRC Press, 1985).
Shen, W. & Zhang, A. Spreading speeds for monostable equations with nonlocal dispersal in space periodic habitats. J. Differ. Equ. 249(4), 747–795 (2010).
Smith, H. L. & Thieme, H. R. Dynamical Systems and Population Persistence Vol. 118 (American Mathematical Society, 2011).
Zhao, X.-Q. Dynamical Systems in Population Biology Vol. 16 (Springer, 2003).
Hale, J. K. Asymptotic behavior of dissipative systems, no. 25. (American Mathematical Society, 2010).
Wu, Y. & Zou, X. Dynamics and profiles of a diffusive host–pathogen system with distinct dispersal rates. J. Differ. Equ. 264(8), 4989–5024 (2018).
Diekmann, O., Heesterbeek, J. A. P. & Metz, J. A. On the definition and the computation of the basic reproduction ratio \(R_0\) in models for infectious diseases in heterogeneous populations. J. Math. Biol. 28, 365–382 (1990).
Yang, F.-Y., Li, W.-T. & Ruan, S. Dynamics of a nonlocal dispersal SIS epidemic model with Neumann boundary conditions. J. Differ. Equ. 267(3), 2011–2051 (2019).
Berestycki, H., Coville, J. & Vo, H. H. On the definition and the properties of the principal eigenvalue of some nonlocal operators. J. Funct. Anal. 271(10), 2701–2751 (2016).
Magal, P. & Zhao, X.-Q. Global attractors and steady states for uniformly persistent dynamical systems. SIAM J. Math. Anal. 37(1), 251–275 (2005).
Acknowledgements
G. Sarmad and A. Tridane are supported by UAEU UPAR grant.
Author information
Authors and Affiliations
Contributions
All authors contributed equally in writing and reviewing the paper.
Corresponding authors
Ethics declarations
Competing interests
The authors declare no competing interests.
Additional information
Publisher’s note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
Open Access This article is licensed under a Creative Commons Attribution 4.0 International License, which permits use, sharing, adaptation, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons licence, and indicate if changes were made. The images or other third party material in this article are included in the article’s Creative Commons licence, unless indicated otherwise in a credit line to the material. If material is not included in the article’s Creative Commons licence and your intended use is not permitted by statutory regulation or exceeds the permitted use, you will need to obtain permission directly from the copyright holder. To view a copy of this licence, visit http://creativecommons.org/licenses/by/4.0/.
About this article

Cite this article
Sarmad, G., Djilali, S., Bentout, S. et al. Fear effect on the mobility of individuals in a spatially heterogeneous environment: a delayed diffusive SPIR epidemic model. Sci Rep 15, 31082 (2025). https://doi.org/10.1038/s41598-025-16280-2
Received:
Accepted:
Published:
Version of record:
DOI: https://doi.org/10.1038/s41598-025-16280-2
