
Abstract
This study experimentally investigates the bifurcation characteristics and synchronization mechanisms in an aeroelastic system exhibiting nonlinear stall flutter behaviour, with particular emphasis on the influence of varying preset angles of incidence and frequency ratios. To that end, wind tunnel experiments are performed on a NACA 0012 aerofoil, which incorporates structural nonlinearities in stiffness as well as aerodynamic nonlinearities resulting from the dynamic stall effect. Bifurcation routes are identified for preset angles of incidence ranging from \(0^\circ\) to \(20^\circ\) and frequency ratios (\(\overline{\omega }\)) between 0.56 and 0.75 by systematically varying the flow speed. The aeroelastic responses in the pitch and plunge are analyzed to determine the onset of Hopf bifurcation and synchronization behaviors within the system. A series of altered bifurcation scenarios exhibiting diverse dynamical behaviours is observed, demonstrating a change in the system’s subcriticality, characterized by a decrease in both the subcritical regime and flutter velocity. Synchronization analysis shows strong coupling between the pitch and plunge responses for preset angles ranging from \(0^\circ\) to \(15^\circ\). However, at \(20^\circ\), an asynchronous regime is identified, characterized by the occurrence of low amplitude limit cycle oscillations (LCOs). Additionally, a frequency-specific analysis in the asynchronous regime shows that high-frequency pitch and plunge components remain synchronized, while low-frequency components exhibit intermittent phase synchronization. The novelty of this work lies in presenting the first experimental study that systematically investigates bifurcation and synchronization behaviour across a wide range of preset angles and frequency ratios, providing essential insights for the design of advanced aeroelastic structures.
Similar content being viewed by others

Introduction
Micro aerial vehicles (MAVs), wind turbines, aircraft wings, and helicopter blades are examples of aeroelastic systems that are susceptible to dynamic stall phenomena. These phenomena can lead to violent pitch-driven limit cycle oscillations (LCOs) in the system, commonly referred to as stall flutter1,2,3,4,5,6. A comprehensive understanding of the physical processes during stall flutter is essential for the effective design of these systems, and experimental data serve as a valuable source of information. Recent studies7,8,9,10,11,12,13,14,15 indicate that the stall flutter behaviour of aeroelastic systems is significantly influenced by structural parameters, such as stiffness and damping, as well as initial conditions (i.e., preset angle of incidence). Variations in these factors can alter the bifurcation scenarios, thereby impacting both the aeroelastic response and the flutter boundary.
Numerous studies have been conducted to understand the dynamics of both classical and stall flutter across different preset angles of incidence. Rajak et al.10 experimentally investigated the aeroelastic behaviour of a rectangular wing with pitch and plunge degrees of freedom at varying static angles of attack. Their findings demonstrated a transition in the bifurcation path, from a degenerate Hopf bifurcation (classical linear flutter) to either a subcritical or supercritical Hopf bifurcation (stall flutter). Bichou et al.11 numerically examined the effect of varying the angle of attack on flutter speed and limit cycle oscillations in an aeroelastic system. Their results showed that the flutter speed increased as the angle of attack increased and that higher preset angles led to a reduction in the dynamic amplitudes of the nonlinear response. Dos Santos et al.12 conducted both experimental and numerical investigations on the nonlinear dynamics of a NACA 0012 airfoil under the influence of structural and aerodynamic nonlinearities due to dynamic stall at different preset incidence angles. Using aeroelastic signals, they estimated the onset of Hopf bifurcation and determined bifurcation diagrams. For the numerical study, they employed the Beddoes–Leishman aerodynamic model, and the results showed good agreement with the experimental observations. In general, most research on stall flutter at various preset angles reveals highly complex dynamic behaviours, with fascinating underlying physics, presenting substantial opportunities for further exploration.
Poirel et al.7,9 presented experimental results for a rigid, elastically mounted NACA 0012 airfoil subjected to varying frequency ratios in pitch and plunge, experiencing stall flutter at transitional Reynolds numbers. The observed oscillations were generally symmetric around zero angle of attack, exhibiting large amplitudes and entering the deep stall regime during part of the cycle. A similar study by Benaissa et al.8 identified a beating phenomenon occurring during frequency lock-in, driven by phase shifts between the pitch and plunge modes. In their low-speed wind tunnel experiments, Dimitriadis and Li16 analyzed the bifurcation behaviour of a wing undergoing stall flutter and attributed the observed dynamics to a subcritical Hopf bifurcation. Shreenivas et al.17 conducted an analysis of a pitch-plunge aeroelastic system under dynamic stall conditions, focusing on the non-normal characteristics of the system and the associated transient energy growth behavior. Both numerical simulations and experimental studies are employed to analyze the system’s response. The results highlight significant transient growth in both amplitude and energy, followed by a decaying oscillatory behaviour under specific initial conditions. While much of the existing literature focuses on stall flutter analysis with either a fixed preset angle of incidence or fixed frequency ratio, the impact of varying both the frequency ratio and static angle of attack on stall flutter conditions remains underexplored. This interaction gives rise to complex dynamical behaviours, and the underlying physics is not yet fully understood, which has become a significant research challenge in the field of aeroelasticity.
To understand the physics behind this complex dynamical behaviors, the application of synchronization concepts in nonlinear fluid dynamical systems18,19,20 and related engineering contexts21,22,23,24 has proven valuable in revealing phase relationships, energy exchange mechanisms, and modal interactions that govern the system’s response. In particular, this studies utilizes frequency-specific synchronization techniques25,26,27,28, which have shown effectiveness in analyzing signals with multiple spectral components, as seen in neuroscience and modal decomposition frameworks. Applying these techniques to pitch and plunge responses enables deeper insight into the coupled dynamics of the nonlinear aeroelastic system. Recent studies29,30,31,32,33 have highlighted the importance of the plunge degree of freedom (DoF) in stall flutter phenomena, approaching the problem through the vantage of synchronization theory. This study was applied to two-degree-of-freedom (DoF) pitch-plunge aeroelastic systems that incorporate both structural and aerodynamic nonlinearities. The studies identified synchronization routes via phase-locking between the pitch and plunge modes, demonstrating the utility of synchronization theory as a tool for identify stall flutter oscillations in coupled aeroelastic systems. Tripathi et al.31,32,33 investigated the influence of structural parameters on nonlinear aeroelastic responses, with particular emphasis on identifying bifurcation scenarios, and synchronization phenomena under both deterministic and stochastic inflow conditions. To better understand the physics of 2:1 internal resonance (IR) in nonlinear aeroelastic systems, they employed frequency-specific synchronization analysis34,35,36,37, in which signals were decomposed into components of specific frequency ranges. This analysis revealed that high-frequency signals (HFS) are always perfectly synchronized, while low-frequency signals (LFS) exhibit asynchrony during the intermittent regime, showing strong synchronization at the onset of beats. Moreover, the bifurcation routes in stall flutter problems are sensitive to triggering via subcriticality, with the underlying physical mechanisms varying as a function of structural parameters and preset angles of incidence10,16,31. Thus, further research is essential to fully understand the synchronization mechanisms when aerodynamic nonlinearities due to dynamic stall interact with structural characteristics at different preset angles of incidence in aeroelastic systems.
In summary, although previous studies have employed bifurcation characteristics and synchronization frameworks to analyze the pitch and plunge modes in nonlinear two-degree-of-freedom aeroelastic systems undergoing dynamic stall, critical questions regarding the routes to instability and the identification of subcritical regimes at various angles of incidence and frequency ratios remain largely unaddressed. To that end, this study aims to experimentally investigate the bifurcation behaviour and apply the concept of frequency-specific phase synchronization to analyze a stall-induced aeroelastic system across different preset angles of incidence and frequency ratios. Wind tunnel experiments were carried out on a NACA 0012 airfoil system with coupled pitch and plunge degrees of freedom. The structure incorporated polynomial-type stiffness nonlinearities, resulting in a complex aeroelastic interaction involving both structural and aerodynamic nonlinear effects. Flutter boundaries and bifurcation behavior were characterized through systematic variations in freestream velocity, while synchronization characteristics were examined by evaluating the phase and frequency of the system’s response. To the authors’ knowledge, this study is the first to examine the interplay of preset incidence angle, frequency ratio, and structural nonlinearity in stall-induced aeroelastic systems, highlighting the underlying synchronization-driven mechanisms governing the observed dynamic transitions.
The structure of the paper is organized as follows: Section Experimental setup provides a detailed description of the experimental setup. Section Test description outlines the post-processing techniques employed to analyze the acquired aeroelastic time-series data. Section Results and discussion presents the experimental findings from the wind tunnel tests, along with relevant discussions. Finally, Section Concluding remarks concludes the study by summarizing the key outcomes.
Experimental setup
The study was carried out at Shiv Nadar Institute of Eminence in a low-speed open-type wind tunnel31,32 (see Fig. 1), which had an operating range of up to 25 m/s. The dimension of the test sections in the wind tunnel is 0.8 m \(\times\) 0.8 m \(\times\) 1.2 m. As seen in Fig. 2a, the experimental setup consists of a NACA 0012 aerofoil with a chord length (c) of 100 mm and a span (b) of 500 mm, positioned horizontally on a support mechanism that permits 2-degree-of-freedom (2-DoF) motion, specifically pitch (\(\alpha\)) and plunge (y).

Photograph of the low-speed wind tunnel.

(a) Photograph of the low-speed wind tunnel cross section (b) Details of the preset angle adjustment device.

Schematic of aeroelastic wing cross-section.
The cross-sectional view of the aeroelastic system, illustrating the essential structural parameters, is presented in Fig. 3, with the corresponding values for the reference case provided in Table 1. The center of mass location (\(x_{c}\)), moment of inertia (\(I_{\alpha }\)), pitch stiffness, and damping coefficients of the system were determined through a combination of experimental techniques tailored to each parameter. \(I_{\alpha }\) was measured using torsional oscillation tests on a freely suspended airfoil, applying a methodology similar to that of Bowman et al.38, while \(x_{c}\) was found via a chordwise free balancing test, as described by Tripathi et al.33. To determine pitch stiffness, load-versus-deflection experiments were carried out where known loads were applied and angular deflections were precisely measured using laser displacement sensors, allowing the nonlinear stiffness behavior to be characterized. Finally, the damping coefficients for both pitch and plunge modes were evaluated independently under wind-off conditions by perturbing the airfoil and recording its free-decay response; the damping ratios (\(\zeta _{\alpha }\) and \(\zeta _{y}\)) were then extracted using the logarithmic decrement method, providing a reliable estimate of the system’s intrinsic damping behavior. The system’s masses include the mass of the plunging frame (\(m_1\)), the mass of the pitching mechanism (\(m_2\)), and the mass of the airfoil (\(m_3\)). The total mass in the plunge (\(m_y\)) and pitch (\(m_{\alpha }\)) modes are given by:
The equations describe the dynamic behavior of the airfoil undergoing stall flutter, accounting for both structural coupling and aerodynamic forcing as follows39,40:
The moment of inertia about the elastic axis (\(I_\alpha\)) is estimated from the total moving mass in pitch, given by \(m_\alpha = m_2 + m_3\). \(x_\alpha\) is the non-dimensional distance from the elastic axis to the airfoil centre of mass. \(k_\alpha\) and \(k_y\) are the pitch and plunge stiffness, respectively. In the experiments, a nonlinearity was encountered in the plunge and pitch degree of freedom and is represented by \(k_{nl}\) and \(k_{sl}\) in the governing equations of motion. \(c_\alpha\) and \(c_y\) represent the damping in pitch and plunge, respectively. L is the unsteady lift force that arises due to fluid loading.
Restoring forces for both pitching and plunging motions are provided by tension springs. The pitching motion is enabled by a pulley-like circular cam equipped with a central bearing, which is mounted onto aluminum profiles at both ends, as illustrated in Fig. 2a. A nylon belt, wrapped around the cam, is connected to a set of tension springs, with the opposite ends of the springs fixed to the supporting frame, ensuring controlled pitch dynamics. Similarly, the plunge motion is achieved through a prismatic joint comprising two shafts and aluminum profiles positioned at either end. To enhance structural stiffness during plunging, two tension springs are affixed to the aluminum profiles on both sides.
A key feature of this assembly is the gripper (see Fig. 2b), which serves as the connection between the airfoil holder and the rest of the setup (pitch spring suspension system). The gripper is designed with multiple uniform circular holes and a hollow pocket, allowing for flexible adjustment of the airfoil’s incidence preset angle relative to the incoming wind tunnel flow. On the other hand, the angle of attack, is a dynamic version of the incidence preset angle. Under oncoming wind flows, the airfoil undergoes oscillations, and the instantaneous pitch angle at a given time would depict the instantaneous angle of attack. This design is critical for enabling precise tuning of the preset angle of incidence, which is a vital parameter for the present fluid–structure interaction problem. By inserting screws into the appropriate holes in the gripper and tightening them, the user can achieve an exact preset angle of incidence. This mechanism provides a robust means of adjusting the airfoil’s incidence angle in the wind-off condition of the system. The ability to set the incidence angle accurately is essential for replicating exact conditions that closely match real-world scenarios or specific experimental conditions, thereby allowing for controlled investigation of the airfoil’s behaviour under varying flow regimes. Through this adjustable gripper mechanism, the system offers significant flexibility, enabling a range of testing configurations and ensuring that the results are both reliable and reproducible. The setup is particularly valuable for conducting detailed aeroelastic studies in a controlled wind tunnel environment. By allowing for precise adjustments to the angle of incidence, it ensures that each test can be conducted under consistent and well-defined conditions, making it a crucial tool in experimental aeroelastic research. The integration of the airfoil holder, pitch spring suspension, and gripper mechanism ensures that the system remains stable throughout the tests while providing the necessary adjustments for comprehensive and accurate data collection.
Two NCDT-type laser displacement sensors, with a resolution of \(1\,\upmu \hbox {m}\) and a range of 50–350 mm, were used to measure and record the motion of the airfoil, as depicted in Fig. 2a. One sensor was positioned below the airfoil, directing the laser onto a spot on the aluminium section and one near the trailing edge. To measure the plunge displacement, the distance between the lower face of the aluminium section and the elastic axis was added to the sensor reading. A Delta HD 4V3 TS3 air velocity sensor was used to measure the flow velocities and the turbulence level is found to be less than 1% in the wind tunnel test section. Data from the sensors were collected using an 8-channel Data Acquisition system with 24-bit resolution. Additional details on the wind tunnel flow characteristics can be found in Tripathi et al.31,32. The experiments were conducted over an airspeed range of up to 19 m/s, corresponding to Reynolds numbers up to \(1.6 \times 10^{5}\).
Test description
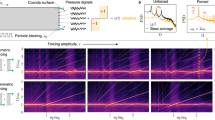
In this study, the experiments are conducted in two parts: (i) for different preset angles of incidence with a fixed frequency ratio, and (ii) for different frequency ratios with different preset angle conditions. Using a gripper, the preset angle of incidence is varied uniformly between \(0^\circ\) to \(20^\circ\). Pitch stiffness is systematically changed while the plunge stiffness remains constant to obtain a frequency ratio between 0.57 and 0.75. The frequency ratio for all conditions, including the baseline case, is shown in Fig. 4, and the natural frequencies of the pitch (\(f_{\alpha }\)) and plunge (\(f_{y}\)) modes are provided in Table 2. Natural frequency values of pitch and plunge mode are derived from the free vibration test, which is conducted under wind-off conditions. It is crucial to estimate the structural nonlinearities because nonlinearities, even small ones, are implicated in coupling the two modes during the experiments and dynamical transitions. The static test’s load vs. deflection data is fitted using a third-order polynomial curve for each DoF while maintaining the other locked. The related polynomial relation and the force vs. displacement plot for the plunge and the moment vs. rotation plot for pitch are displayed in Fig. 5, respectively. The force and moment represent discretely applied static loads during the load–deflection experiments. Specifically, known weight loads are applied one at a time to the system, and the corresponding static displacements in plunge (y) and pitch (\(\alpha\)) are recorded. These measured responses represent the system’s equilibrium positions under each applied load. The resulting load–deflection data are then used to estimate the stiffness characteristics in both pitch and plunge degrees of freedom.

Natural frequencies for different values of \(\overline{\omega }\). (a) plunge mode. (b)–(e) pitch mode.
The tests were conducted at various airspeeds (U) and preset angles of incidence ranging from \(0^\circ\) to \(20^\circ\). The preset angle of incidence, set by adjusting the gripper position as shown in Fig. 2b, represents the wing’s static equilibrium position before exposure to airflow. The airspeed was varied between 0 and 19 m/s, and the static angles of attack were chosen as \(0^\circ\), \(5^\circ\), \(10^\circ\), \(15^\circ\), and \(20^\circ\). In this experiment, no external excitation is applied to the structure. As a result, the stall-flutter oscillations observed are self-excited. It is important to note that the present study focuses on the characterization of stall flutter behavior primarily through displacement-based response measurements, rather than direct aerodynamic force quantification. This approach was adopted due to limitations in our current experimental setup, which does not include direct force measurement instruments to obtain static lift data. Nonetheless, the significance of the aerodynamic lift curve is well recognized, and future efforts will incorporate force measurement capabilities to facilitate a more comprehensive understanding of the underlying aerodynamic mechanisms.

Characterization of nonlinearities from static test and cubic polynomial curve fitting. (a) plunge stiffness. (b) pitch stiffness.
The airfoil position is initially measured at zero airspeed to establish a reference, after which the wind speed is gradually increased. Wind tunnel experiments are conducted with U as the bifurcation parameter. As aeroelastic systems are susceptible to subcritical bifurcations16, therefore, bifurcation analysis is performed by first increasing U from zero to the onset of instability and then to a maximum speed, referred to as the forward sweep. Subsequently, U is decreased from the maximum speed to the point where the aeroelastic system returns to equilibrium, known as the backward sweep. The backward sweep reveals the hysteretic behaviour, indicating subcriticality. It is important to recognize the need for identifying subcritical branches, as they can lead to significantly different response dynamics, which are crucial for accurate structural safety predictions. To further explore the physics behind these nonlinear oscillatory phenomena, the analysis is framed within the context of synchronization theory31,41. This synchronization perspective helps elucidate the complex fluid–structure interactions that give rise to these oscillations and offers a deeper understanding of the dynamic response involved in the system’s behaviour.
The well-established nonlinear phenomenon of synchronization has been widely studied in various nonlinear dynamical systems22,42,43,44, including aeroelastic systems31,45, vortex-induced vibration systems46,47 and thermoacoustics systems48,49. It exhibits complex bifurcation behaviour with a range of phase relationships between the response of the systems. In this study, synchronization between the pitch and plunge modes in the aeroelastic system is analyzed using an analytical signal approach. The analytic signal (S(t) is a complex quantity given by:
where x(t) represents the original signal and \(x_H(t)\) is its Hilbert transform (HT). The terms \(\phi (t)\) and A(t) denote the instantaneous phase and instantaneous amplitude, respectively. A quantitative measure called the Phase Locking Value (PLV) is derived from the phase difference (\(\triangle \phi\)) between the plunge and pitch modes. A PLV value close to 1 indicates perfect synchronization, while a value near zero corresponds to completely asynchronous behaviour. A comprehensive explanation of the synchronization theory can be found in our previous studies29,31.
With the experimental terminologies described, we now proceed to analyze the aeroelastic responses obtained from the wind tunnel experiments. To gain a deeper understanding of the physics behind the transition to stall flutter, both conventional synchronization analysis and frequency-specific synchronization analysis will be employed to investigate the onset of instability across different preset angles of incidence and frequency ratios. The following section presents the details of the experimental results.
Results and discussion
Aeroelastic response analysis
This section describes the dynamic response of the wing during the wind tunnel tests. Experimental tests were conducted for a preset angle of incidence (\(\alpha _{pre}(^\circ )\)) ranging from \(0^\circ\) to \(20^\circ\)). For dynamic response analysis, the pitch and plunge responses are plotted with U set as a bifurcation parameter, without perturbing the system from its initial conditions. As U approaches \(U_{cr}\), the response dynamics transition from a steady state to limit cycle oscillations (LCOs), signalling the onset of flutter instability in the aeroelastic system.

Bifurcation plots for different preset angle. (a) \(\alpha _{pre}(^\circ )\) = \(0^\circ\) , (b) \(\alpha _{pre}(^\circ )\) = \(5^\circ\), (c) \(\alpha _{pre}(^\circ )\) = \(10^\circ\), (d) \(\alpha _{pre}(^\circ )\) = \(15^\circ\), (e) \(\alpha _{pre}(^\circ )\) = \(20^\circ\), and \(\overline{\omega }\) = 0.67, \(f_{y}\) = 2.25 Hz, \(f_{\alpha }\)= 3.35 Hz, Regime (i) stable fixed point (FP) attractor, Regime (ii) coexisting stable FP and stable LCO attractors, and Regime (iii) stable LCO attractor, showing the subcritical Hopf bifurcation.

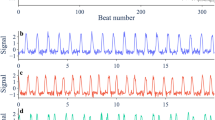
Aeroelastic response dynamics and their corresponding frequency responses at \(U_{crt}\) and \(U_{fold}\) for \(\overline{\omega }\) = 0.67, \(f_{y}\) = 2.25 Hz, \(f_{\alpha }\)= 3.35 Hz. (a) \(\alpha _{pre}(^\circ )\) = \(0^\circ\) , (b) \(\alpha _{pre}(^\circ )\) = \(5^\circ\), (c) \(\alpha _{pre}(^\circ )\) = \(10^\circ\), (d) \(\alpha _{pre}(^\circ )\) = \(15^\circ\), (e) \(\alpha _{pre}(^\circ )\) = \(20^\circ\).
It is important to note that, in the present study, we utilized visual inspection of time histories for identifying qualitative transitions in the system’s dynamic behavior. This approach, has been widely adopted in the analysis of nonlinear aeroelastic systems, for effectively capture bifurcations, non-periodic oscillations, or nonlinear mode coupling10,16,31,33. By closely examining the evolution of the time-domain response, we are able to detect critical transitions, such as the shift from fixed point to sustained limit cycle oscillations (LCOs), which serve as indicators of Hopf bifurcations31. This qualitative approach has been effectively demonstrated in several previous experimental studies32. For instance, Dimitriadis et al.16 and Razak et al.10 used time-history-based visual inspection to identify bifurcation behavior associated with stall flutter at varying preset angles of attack in low-speed wind tunnel environments. These studies showed that even minor variations in flow speed or preset angle can significantly alter the system’s response, as consistently captured through visual analysis Similarly, more recent work by Tripathi et al.31,32,33 adopted the same technique to explore synchronization mechanisms in stall-induced aeroelastic systems. By decomposing the time signals and analyzing their frequency components, they were able to find complex phase relationships and transitions between synchronous and asynchronous regimes. Given the effectiveness and relevance of this approach in prior work, we adopted a similar approach in our current study to examine bifurcation phenomena under a broader range of conditions. Specifically, we extended the investigation to include different preset angles of attack and frequency ratios, which had not been systematically explored in the earlier studies. This approach allows us not only to validate our observations in the context of established literature but also to contribute new insights into complex nonlinear interactions evolve in the presence of structural and aerodynamic nonlinearities.
For the reference case, we begin with an initial value of \(\overline{\omega }\) = 0.67 and then systematically vary the pitch stiffness while keeping the plunge stiffness the same to achieve a frequency ratio (\(\overline{\omega }\)) range between 0.57 and 0.75. The choice of \(\overline{\omega }= 0.67\) is based on observations that similar qualitative behaviours are exhibited for other values of \(\overline{\omega }\) and the dynamics associated with these variations will be further explored in a subsequent subsection. In the first case, at \(\overline{\omega }\) = 0.67 (see Fig. 6a–e), the onset of flutter is characterized by a subcritical Hopf bifurcation10,16,31, where a stable fixed-point attractor and a stable LCOs attractor coexist at the flow speeds within regime (ii), corresponding to various preset angles of incidence. It is found that, for \(0^\circ\) preset angle of incidence, flutter speed (\(U_{cr}\)) is 12.2 m/s as shown in (Fig. 6a) and fold point (\(U_{fold}\)) = 8.5 m/s (Note that the fold point refers to the lowest value of flow speed is approximately the same as the minimum speed at which the LCOs are obtained during the backward sweep experiment). Furthermore, it can be seen from the time history of pitch and plunge motion (see Fig. 7a) the flutter onset is observed at \(U_{cr}\) with large amplitude LCOs, indicating the onset of stall flutter instability (see regime (iii) in Fig. 6a). It is important to highlight that these oscillations are stall flutter oscillations31 because the LCOs frequency (4.35 Hz) exceeds the system’s pitch natural frequency (3.35 Hz), and the pitch amplitudes are substantial, approximately \(35^\circ\), which is greater than the stall angle for a NACA 0012 airfoil. The aeroelastic pitch response dynamics exhibit no substantial qualitative changes within the regime (iii), except an increase in pitch amplitude as the flow speed increases.
Next, we increase the preset angle of incidence by \(5^\circ\). As shown in Fig. 6b, both the flutter speed (\(U_{cr}\)) and fold point (\(U_{fold}\)) decrease, observed at 11.1 m/s and 8 m/s, respectively, with large-amplitude LCOs, marking the onset of stall flutter instability (see Fig. 7b). Additionally, the subcritical regime [regime (ii)] is noticeably reduced compared to the previous case. As in the previous scenario, the flutter can be classified as stall flutter since the pitch amplitudes exceed the static stall values and the flutter frequency is higher than the pitch natural frequency (It is important to note that static stall is a steady aerodynamic phenomenon characterized by flow separation and loss of lift when the angle of attack exceeds a critical value. In contrast, stall flutter is a dynamic instability resulting from the interaction between unsteady aerodynamic forces during dynamic stall and the structure’s motion, leading to self-sustained oscillations. Unlike static stall, stall flutter involves nonlinear, time-dependent behavior and can occur even in the post-stall regime). When the flow speed is further increased to 14.7 m/s, no significant qualitative changes in the dynamics are observed.
Next, we present the bifurcation diagrams for pitch motions, which exhibit changes in the system’s behaviour as the preset angles of incidence are increased. Specifically, as we increase the incidence angle to \(10^\circ\) and \(15^\circ\), as shown in Fig. 6c,d. The corresponding flutter speeds decrease to \(U_{cr}\) = 10.2 m/s and 9.6 m/s (see Fig. 7c,d) compared to the previous cases (\(\alpha _{pre}(^\circ )\) = \(0^\circ\) and \(5^\circ\)), where \(U_{cr}\) was 13.3 m/s and 11.1 m/s, respectively. This trend aligns with findings from Dos Santos et al.12 and Bichiou et al.11, who showed that as the airfoil approaches its stall condition with increasing preset angles, the stall induction process accelerates, leading to a reduction in flutter speed. Additionally, the subcritical regime [regime (ii)] is significantly reduced compared to the previous cases and the fold point (\(U_{fold}\)) is shifted to 8.1 m/s and 8.4 m/s. The pitch amplitudes approach \(30^\circ\) at \(U_{cr}\), and the flutter can be classified as stall flutter since the flutter frequencies are close to \(f_{\alpha }\), and the pitch amplitudes exceed the static stall values. The aeroelastic response dynamics remain qualitatively unchanged as the flow speed (U) is further increased from the critical speed (\(U_{cr}\)).
At a preset angle of \(20^\circ\), the results indicate the presence of both low- and high-amplitude limit cycle oscillations (LCOs) in the pitch response, as shown in Fig. 6e. Significant qualitative and quantitative changes in the dynamic responses were observed at this preset angle as the flow speed (U) increased. Small-amplitude LCOs were first encountered at a critical speed (\(U_{cr}\)) of 8.1 m/s, as depicted in Fig. 7e, where the pitch amplitude was approximately \(5^\circ\). From the bifurcation diagram, we can clearly see that the amplitude increases gradually with flow speed up to \(U = 12.8\) m/s. However, at \(U = 13.4\) m/s, the amplitude exhibits a sudden increase to a significantly higher value (approximately \(40^\circ\)), after which the response amplitude continues to rise gradually until reaching \(U = 13.8\) m/s.
Furthermore, in the backward sweep (decreasing U), the LCO’s amplitude gradually declined as the flow speed was reduced. At U = 9.8 m/s, the amplitude of the responses suddenly jumped to a much lower value, and at \(U_{fold}\) = 7 m/s (see Fig. 7e), the vibrations eventually vanished. It demonstrates that there was a flow speed range between 7 and 13.8 m/s where two different values of the amplitude could be obtained, depending on whether the airspeed was increasing or decreasing. This jump phenomenon is characteristic of nonlinear systems undergoing a hysteretic behaviour and fold bifurcation and has already been encountered in aeroelastic systems10. In this case fold point \(U_{fold}\), and the sub-critical regime [regime (ii)] is significantly reduced, resulting in the complete transition of the subcritical Hopf bifurcation into a supercritical Hopf bifurcation.
The frequency content of the LCOs observed at this preset angle of incidence is also of interest. As shown in Fig. 7e, the low-amplitude LCOs have pitch and plunge frequencies (3.77 Hz) that are close to the pitch natural frequency (3.35 Hz). It is important to note that for low-amplitude LCOs, the dominant frequency component corresponds to the pitch natural frequency, indicating that the pitch mode governs the system dynamics. In this case, maybe a light stall event is occurring, as the pitch amplitudes remain small and do not surpass the static stall limit1,10,33,50. To further elucidate the differences in frequency content between the low amplitude LCOs, and to explore the underlying physics of the nature of response, a discussion from the perspective of synchronization theory is provided in later subsections.
The previously discussed case for \(\overline{\omega }\) = 0.67 illustrates the conventional route to stall flutter at different preset angles of incidence, in line with recent stall flutter experiments10,12. As the preset angle increases, the flutter velocity decreases, suggesting that the airfoil approaches its stall condition, thereby accelerating the onset of stall-induced instability. Similar observations were made in wind tunnel experiments by Rajak et al.10, where a frequency ratio (\(\overline{\omega }\)) close to 0.7 was found to be characteristic of nonlinear systems experiencing fold bifurcation and reduction in flutter speed with increasing preset angle. However, a subsequent study by Dos Santos et al.12 showed that, even with closely spaced pitch and plunge natural frequencies (\(\overline{\omega }\) = 0.87), higher angles of incidence cause dynamic stall nonlinearities to dominate over structural nonlinearities. These dynamic stall effects tend to increase the energy associated with the pitching motion. Moreover, experiments conducted at a frequency ratio of \(\overline{\omega }\) = 0.67 reveal stall flutter for preset angles between \(0^\circ\) and \(15^\circ\), while low- and high-amplitude LCOs are observed at a preset angle of \(20^\circ\). As the preset angle increases from \(0^\circ\) to \(20^\circ\), a gradual decrease in the flutter frequency is noted at the critical velocity \(U_{cr}\), with frequencies reducing from 4.35 to 3.77 Hz.
It is worth noting that, during wind tunnel experiments, flutter oscillations are encountered as a result of a subcritical Hopf bifurcation16,51 and subcritical regime [regime (ii)] is decreasing with increasing preset angle of incidence (see Fig. 6). Recent studies across various domains52,53,54 have highlighted the occurrence of changes in subcriticality within nonlinear systems. Depending on the experimental setup and parameter variations, bifurcation behaviour can exhibit both subcritical and supercritical characteristics. Similar changes in subcriticality are observed in our system as the preset angle of incidence is varied from \(0^\circ\) to \(20^\circ\). Increasing the preset angle to \(20^\circ\) results in a significant shift in the bifurcation characteristics, leading to a considerably shallower subcritical regime. This bifurcation scenario indicates that as the preset angle of incidence increases, the system’s response dynamics undergo a transition, with the subcritical bifurcation evolving towards a normal supercritical Hopf bifurcation at higher preset angles10. Furthermore, the amplitudes of the stall flutter LCOs in the backward sweep reduce as U > \(U_{cr}\) and eventually, the response dynamics shift to a fixed-point signature at the fold point. Such behaviour is attributed to the presence of subcriticality in the system. A recent study also showed that17,31, one can also trigger the responses to jump from the stable, fixed-point regime to stable LCOs, by changing the initial conditions via manual perturbation in the proximity of the fold point. Observations from our study here conclusively demonstrate that increasing the preset angle (change in initial conditions) leads to the shifting of the fold point, due to the fact that the subcriticallty region is reduced.
It is important to note that, in this study, a pitch–plunge aeroelastic experimental setup was developed to investigate stall flutter in a controlled wind tunnel environment. Although the present setup shares similarities with previous studies39,40, those investigations primarily addressed coupled-mode flutter, whereas the current work focuses specifically on stall-induced flutter phenomena. The adopted methodology is closely aligned with several well-established experimental studies on stall flutter7,8,10,12,16,31,33. A direct quantitative comparison with existing literature, however, remains challenging due to differences in critical system parameters, such as airfoil geometry, mass distribution, stiffness, and structural damping—which are known to significantly influence stall flutter characteristics10,16. Nevertheless, the trends observed in our study show strong qualitative agreement with those reported by Tripathi et al.31,32,33, where experiments across a range of frequency ratios revealed flutter boundaries and subcritical transitions consistent with our findings, particularly at a preset angle of attack of \(0^\circ\). In that study, the onset of flutter was identified as a subcritical Hopf bifurcation during forward parameter sweeps and a fold bifurcation during backward sweeps16,31. Additionally, the flutter boundaries exhibited marginal shifts relative to those reported in Tripathi et al.31,33, which were attributed to variations in pitch and plunge stiffness and the associated structural nonlinearities. Their findings also revealed pitch-dominant limit cycle oscillations (LCOs) with amplitudes reaching up to \(35^\circ\), consistent with the stall flutter behavior observed in the present experiments.
With a clear understanding of the Hopf bifurcation in the stall flutter problem at various preset angles, we now turn to investigate the nonlinear aeroelastic response behaviour under different frequency ratios and preset angles. Before proceeding, we summarize the key findings observed thus far: the current fluid–structure interaction problem reveals that increasing the preset angle results in a decrease in both flutter velocity (\(U_{cr}\)) and the subcritical region. These results are summarized in Table 3. In the following sections, we will explore the nonlinear response behaviour under different frequency ratios and preset angle conditions.
Effect of frequency ratio (\(\overline{\omega }\))
The next part of the analysis focuses on investigating the aeroelastic behaviour at different frequency ratios by systematically varying the pitch stiffness while keeping the plunge stiffness the same (see Fig. 4). In this section, three frequency ratio values, \(\overline{\omega }\) = 0.75, 0.62, and 0.56, are chosen. Distinct dynamic transitions are observed at these values, leading to a change in the bifurcation route.

Bifurcation plots for different preset angle. (a) \(\alpha _{pre}(^\circ )\) = \(0^\circ\) , (b) \(\alpha _{pre}(^\circ )\) = \(5^\circ\), (c) \(\alpha _{pre}(^\circ )\) = \(10^\circ\), (d) \(\alpha _{pre}(^\circ )\) = \(15^\circ\), (e) \(\alpha _{pre}(^\circ )\) = \(20^\circ\), and \(\overline{\omega }\) = 0.75, \(f_{y}\) = 2.25 Hz, \(f_{\alpha }\)= 3 Hz, Regime (i) stable fixed point (FP) attractor, Regime (ii) coexisting stable FP and stable LCO attractors, and Regime (iii) stable LCO attractor, showing the subcritical Hopf bifurcation.
Initially, we analyzed the frequency ratio variation using \(\overline{\omega }\) = 0.75, with \(f_{y}\) = 2.25 Hz, the same value used in the previous section, and \(f_{\alpha }\) reduced to 3 Hz (see Fig. 4a,b). The resulting aeroelastic bifurcation characteristics with respect to pitch motion at different preset angles are shown in Fig. 8. The bifurcation diagram reveals that increasing the preset angle leads to a reduction in the subcritical regime [regime ii] and a decrease in flutter speed. Flutter is classified as stall flutter because the pitch amplitudes exceed the static stall values31, except at a 20-degree preset angle, where both low and high amplitude LCOs are observed (see Fig. 8e), similar to the earlier case at \(\overline{\omega }\) = 0.67, with the pitch and plunge frequencies close to the pitch natural frequency (\(f_{\alpha }\)) at \(U_{cr}\). For the sake of brevity, we are not showing all the time history of responses, and FFT results are for this case.

Bifurcation plots for different preset angle. (a) \(\alpha _{pre}(^\circ )\) = \(0^\circ\) , (b) \(\alpha _{pre}(^\circ )\) = \(5^\circ\), (c) \(\alpha _{pre}(^\circ )\) = \(10^\circ\), (d) \(\alpha _{pre}(^\circ )\) = \(15^\circ\), (e) \(\alpha _{pre}(^\circ )\) = \(20^\circ\), and \(\overline{\omega }\) = 0.62, \(f_{y}\) = 2.25 Hz, \(f_{\alpha }\)= 3.6 Hz, Regime (i) stable fixed point (FP) attractor, Regime (ii) coexisting stable FP and stable LCO attractors, and Regime (iii) stable LCO attractor, showing the subcritical Hopf bifurcation.

Bifurcation plots for different preset angle. (a) \(\alpha _{pre}(^\circ )\) = \(0^\circ\) , (b) \(\alpha _{pre}(^\circ )\) = \(5^\circ\), (c) \(\alpha _{pre}(^\circ )\) = \(10^\circ\), (d) \(\alpha _{pre}(^\circ )\) = \(15^\circ\), (e) \(\alpha _{pre}(^\circ )\) = \(20^\circ\), and \(\overline{\omega }\) = 0.56, \(f_{y}\) = 2.25 Hz, \(f_{\alpha }\)= 3.95 Hz, Regime (i) stable fixed point (FP) attractor, Regime (ii) coexisting stable FP and stable LCO attractors, and Regime (iii) stable LCO attractor, showing the subcritical Hopf bifurcation.
Next, we examine the frequency ratio \(\overline{\omega }\) = 0.62 by increasing the pitch stiffness (\(f_{\alpha }\)) to 3.6 Hz, while maintaining the plunge stiffness same \(f_{y}\) = 2.25 Hz (see Fig. 4a,d). The bifurcation behaviour observed in this case is qualitatively similar to that of the previous scenario except at a 20-degree preset angle (see Fig. 9), where stall flutter LCOs are observed at \(U_{cr}\). As shown in the bifurcation diagram (see Fig. 9a–e), it is evident that increasing the preset angle results in a gradual reduction of the subcritical regime [regime ii] and the flutter can be classified as stall flutter, as the pitch amplitudes exceed the static stall values at all preset angles.

Variations of the Flutter velocity (U cr) for the different values of the preset angle of attack (\(\alpha _{pre}(^\circ )\)) and Frequency ratio (\(\overline{\omega }\)).

Bifurcation plots for preset angle, \(\alpha _{pre}(^\circ )\) = \(17.5^\circ\): (a) \(\overline{\omega }\) = 0.56 , (b) \(\overline{\omega }\) = 0.62, (c) \(\overline{\omega }\) = 0.67, (d)\(\overline{\omega }\) = 0.75, Regime (i) stable fixed point (FP) attractor, Regime (ii) coexisting stable FP and stable LCO attractors, and Regime (iii) stable LCO attractor, showing the subcritical Hopf bifurcation.
The bifurcation characteristics at \(\overline{\omega }\) = 0.56 are analyzed by further increasing the pitch stiffness to \(f_{\alpha }\) = 3.95 Hz, while maintaining the plunge stiffness \(f_{y}\) same (see Fig. 4a,e). In this scenario, as the preset angle is increased from \(0^\circ\) to \(5^\circ\), a slight decrease in flutter speed is observed, along with a reduction in the subcritical regime [regime ii] (see Fig. 10a,b). Subsequently, when the preset angle is increased from \(5^\circ\) to \(10^\circ\), the flutter speed increases, while the subcritical regime [regime ii] remains unchanged (see Fig. 10b,c). As the preset angle is further increased beyond \(10^\circ\), both the flutter speed decreases significantly and the subcritical regime is further reduced (see Fig. 10d,e). The drastic reduction in flutter speed can be attributed to the interaction between structural and aerodynamic nonlinearities, particularly dynamic stall, at preset angles around \(20^\circ\). Additionally, it is observed that at this preset angle, low and high amplitude LCOs are observed (see Fig. 10e).
The variation of flutter speed (\(U_{cr}\)) with respect to the preset angle at different frequency ratios (\(\overline{\omega }\)) is presented in Fig. 11. It is observed that, as the preset angle is increased to \(10^\circ\), only minimal variation in flutter speed is observed across all frequency ratios, consistent with findings from previous studies11,12. As the preset angle increases from \(10^\circ\) to \(20^\circ\), the flutter speed continues to decrease for \(\overline{\omega }\) = 0.56 and 0.67, while an alternating increase-decrease pattern is observed for \(\overline{\omega }\) = 0.62 and 0.75. This behaviour can be attributed to the fact that, for preset angles greater than \(10^\circ\), the airfoil approaches its static stall angle of attack, leading to both light and deep stall phenomena, particularly at larger preset angles1,12,33. The non-linear relationship between flutter speed (\(U_{cr}\)) and frequency ratio (\(\overline{\omega }\)) suggests that (see Fig. 12) the onset of flutter is influenced by a combination of factors, including the preset angle (initial conditions), individual pitch and plunge stiffness, and associated nonlinearities.
In summary, the variation of \(\overline{\omega }\) with different preset angles of incidence leads to a range of bifurcation scenarios, resulting in pitch-dominant Limit Cycle Oscillations (LCOs)16,31. These experiments were conducted by systematically adjusting the pitch stiffness, causing \(\overline{\omega }\) to vary between 0.56 and 0.75. It is important to note that changes in pitch stiffness also induce alterations in the structural nonlinearities. At a preset angle of \(20^\circ\), the bifurcation scenarios are qualitatively similar across most cases, except for \(\overline{\omega }\) values of 0.62, where Stall flutter LCOs are observed. The primary focus of this study is the analysis of bifurcation behaviour across various \(\overline{\omega }\) values, with one of the key findings being that the subcritical region decreases with an increasing preset angle for all \(\overline{\omega }\) values. Furthermore, by examining the presence of subcritical dynamics at different \(\overline{\omega }\) values, we have found that changes in the initial conditions (preset angle) directly affect the subcritical region, which poses a potential risk to the aeroelastic structure. The results and response dynamic at different \(\overline{\omega }\) are summarized in Table 4.
In our experiments, aeroelastic response at a 20-degree preset angle exhibits complex dynamical transitions, characterized by both low- and high-amplitude LCOs. These transitions are driven by the interaction between several factors: the structural nonlinearity of the system, the preset angle, and the nonlinear aerodynamic forces. To investigate these transitions in greater detail, the underlying physical mechanisms are analyzed from the perspective of synchronization, as outlined in studies by Vishal et al.30 and Dheeraj et al.31. The use of synchronization analysis is crucial and plays a pivotal role in uncovering the fundamental physical mechanisms responsible for these transitions. This approach allows for a detailed investigation of how the various components of the system, such as pitch and plunge motions, are coupled and influence one another over time. In scenarios involving complex dynamic behaviour including low- and high-amplitude limit cycle oscillations (LCOs), synchronization analysis offers valuable insights into the initiation, progression, and interaction of these modes.
Synchronization analysis
A key aspect of synchronization studies in nonlinear dynamical systems55,56,57,58 is the investigation of phase and frequency locking in oscillatory responses. Extensive research has been conducted on synchronization phenomena in aeroelastic systems8,30,33,59,60. In our study, we apply these synchronization concepts to investigate the interactions between pitch and plunge modes in aeroelastic systems. Quantitative measures such as Phase-Locking Values (PLV) are employed to assess how variations in preset angles and frequency ratios affect the interactions between pitch - plunge modes and the onset of stall flutter. This approach aligns with established methodologies in nonlinear fluid dynamical systems18,19,20,61 and allied engineering systems22,23,41,62 that provides a clear perspective on characterizing interactions between pitch and plunge modes within the context of aeroelastic systems.

Synchronization analysis (RPV time histories and PLV variation) post Hopf point at preset angles. (a) \(\alpha _{pre}(^\circ )\) = \(0^\circ\) , (b) \(\alpha _{pre}(^\circ )\) = \(5^\circ\), (c) \(\alpha _{pre}(^\circ )\) = \(10^\circ\), (d) \(\alpha _{pre}(^\circ )\) = \(15^\circ\) and frequency ratio (\(\overline{\omega }\) = 0.67).

Synchronization analysis for post Hopf points at preset angle (\(\alpha _{pre}(^\circ )\) = \(20^\circ\)) and frequency ratio (\(\overline{\omega }\) = 0.67). (a)–(c) RPV time histories. (d) PLV variation.
Synchronization between coupled oscillators is a fundamental nonlinear phenomenon wherein the phase or frequency of interacting systems adjusts due to coupling19,20,63,64. One of the key indicators of synchronization is the evolution of the relative phase variation (RPV) over time. If the oscillators are perfectly synchronized, the RPV becomes constant, indicating phase locking. In practice, however, especially in experimental systems, the RPV often fluctuates but remains bounded—a behavior referred to as phase trapping65. Such bounded RPVs correspond to a high phase locking value (PLV), typically close to one30, and still represent strong synchronization. In contrast, when the RPV increases or decreases monotonically, the oscillators are said to be undergoing phase drifting31,66, indicating asynchrony. This results in a PLV close to zero. A more nuanced behavior commonly observed is intermittent phase synchronization67, characterized by alternating intervals of phase locking and drifting. These transitions are marked by phase slips, where the RPV abruptly jumps by integer multiples of \(2\pi\), indicating temporary loss and recovery of synchrony64. Additionally, systems can exhibit phase-flip bifurcations, where the average RPV shifts suddenly by \(\pi\), typically due to changes in a coupling parameter. This shift is often accompanied by a corresponding jump in frequency and reflects a transition from in-phase to anti-phase synchronization or vice versa68.
To this end, this section investigates the synchronization characteristics of experimentally obtained pitch and plunge responses for stall flutter at various preset angles, specifically addressing low and high-amplitude LCOs at a 20-degree preset angle. Moreover, we simultaneously examine the relative phase difference values (RPVs) between the pitch and plunge responses at \(\overline{\omega }= 0.67\), as shown in Figs. 13 and 14, based on the time histories provided in Appendix B. We first analyzed the dynamics of the relative phase difference RPV (\(\Delta \phi\)) between the pitch and plunge modes at preset angles of 0, 5, 10 and 15 degrees. As the flow speed increases, the phase locking value (PLV) approaches 1, indicating perfect synchronization through phase trapping22,31,32 (see Fig. 13a–d). This behaviour represents phase locking between pitch and plunge oscillations, with the bounded fluctuations in RPVs also referred to as phase trapping. The synchronization dynamics observed are consistent with those reported by Dheeraj et al.31.
The corresponding synchronization analysis for the preset angle of \(20^\circ\) post-Hopf bifurcation is presented in Fig. 14a–d. At flow speeds of U = 8.1, 9.1, and 9.8 m/s, corresponding to low-amplitude limit cycle oscillations (LCOs), a loss of synchronization between the pitch and plunge modes is observed. The relative phase between the pitch and plunge modes exhibits a steep drift over time (see Fig. 14a), and the two modes become asynchronous with the phase locking value (PLV) = 0.2, 0.4, and 0.6 (see Fig. 14d), respectively. Interestingly, as the flow speed increases to 11 m/s, the amplitude of the LCOs increases, and a sudden transition in the RPVs occurs. Instead of a steep drift, the RPVs undergo phase slips (see Fig. 14b), with the PLV rising to approximately 0.85 (Fig. 14d). This suggests a state of intermittent phase synchronization67, where the instantaneous phases of pitch and plunge become trapped. As the flow speed is further increased to between 11.9 and 13.8 m/s, during high-amplitude LCOs, the pitch and plunge modes rapidly return to phase synchronization (see Fig. 14c). This sudden and subsequent restoration of synchronization is reflected in Fig. 14d, where the PLV approaches 1.
We next examine the synchronization behaviour near the fold point for all preset angles at \(\overline{\omega }\) = 0.67, owing to the inherent subcritical nature of the aeroelastic system. For a preset angle of \(0^\circ\), the phase locking value (PLV) at \(U_{fold}\) is 0.98 (see Fig. 15a), indicating strong synchronization, attributed to phase locking between pitch and plunge oscillations, with RPVs exhibiting phase trapping31,65. As we increase the preset angles (see Fig. 15b–d), the PLV remains high, indicating strong phase synchronization; however, we note that its value slightly decreases from approximately 0.99 to 0.95, rather than increasing, suggesting that while phase locking persists, perfect synchronization is not strictly achieved. At a preset angle of \(20^\circ\), \(U_{fold}\) decreases to approximately 7 m/s, with low-amplitude LCOs, where the pitch amplitude is around \(2^\circ\) and the plunge amplitude is close to 0.5 mm. The PLV at \(U_{fold}\) drops to about 0.25, signalling a clear asynchrony between the pitch and plunge modes.

Aeroelastic response dynamics for different preset angle and their corresponding frequency responses, synchronization analysis, at \(U_{fold}\) and \(\overline{\omega }\) = 0.67. (a) \(\alpha _{pre}(^\circ )\) = \(0^\circ\), (b) \(\alpha _{pre}(^\circ )\) = \(5^\circ\), (c) \(\alpha _{pre}(^\circ )\) = \(10^\circ\) (d) \(\alpha _{pre}(^\circ )\) = \(15^\circ\), (e) \(\alpha _{pre}(^\circ )\) = \(20^\circ\).
In short, stall flutters with large-amplitude LCOs at different preset angles exhibit phase synchronization between pitch and plunge modes through phase trapping except at the \(20^\circ\) preset angle. At a preset angle of \(20^\circ\), nonlinearities in the structural and aerodynamic components can induce complex interactions between the pitch and plunge modes, which may not be fully captured by traditional synchronization analysis. Frequency-specific synchronization analysis, however, is better suited to account for these changes, providing more accurate insights into how these modes are influenced by nonlinear effects32,69. To that end, for a deeper understanding of this synchronization behaviour, we employ frequency-specific synchronization analysis based on time-signal decomposition.
In scenarios where signals contain multiple frequencies, such as in brain signal analysis, various modal decomposition techniques have been developed to analyze frequency-specific synchronization between intrinsic modes35,36,70,71. In a recent study by Dheeraj et al.32, frequency-specific synchronization analysis was applied to pitch and plunge aeroelastic time signals, which were decomposed into two components: a higher frequency signal (HFS) and a lower frequency signal (LFS), each corresponding to specific frequency ranges. The study revealed that the higher frequency signal (HFS) is always perfectly synchronized. In contrast, the lower frequency signal (LFS) exhibits asynchrony during the intermittent regime but shows strong synchronization at the onset of beat phenomena. The physical insights provided in this study are valuable for the design of aeroelastic structures that are often subjected to dynamic stall. This study takes the motivation to use Frequency-specific synchronization analysis for different preset angles, to get a better understanding of mutual synchronization, especially when the conventional synchronization analysis does not fully explain the aeroelastic response dynamics.
Frequency-specific synchronization analysis
Frequency-specific synchronization analysis32 is performed by decomposing the original aeroelastic time response signals of pitch and plunge into two components: a higher frequency signal (HFS) and a lower frequency signal (LFS). A bandpass filter with frequency bands of 0.1–3 Hz for the LFS and 3–10 Hz for the HFS is carefully selected to isolate the primary and secondary frequency responses into the respective components. The filtering process was applied only after the clear identification of distinct LFS and HFS components in the FFT spectra. The filtering was designed with carefully chosen, narrow passbands to isolate dominant frequencies without introducing phase distortion—consistent with best practices reported35,63,64,71. Moreover, variations in filter bandwidths yielded qualitatively similar synchronization trends, strengthening confidence that the observed PLV results are not artifacts of the filter design.
We are using this approach at a \(20^\circ\) preset angle, where low-amplitude LCOs and asynchrony between the pitch and plunge modes are observed, despite the flutter frequency being close to the pitch natural frequency. Therefore, frequency-specific synchronization analysis is performed for \(U_{fold}\) = 7 m/s at the \(20^\circ\) preset angle. While frequency-specific synchronization analysis has also been performed for other cases, the results are presented in the Appendix A. For the sake of brevity, only the synchronization characteristics for \(\overline{\omega }= 0.67\) at \(U_{fold}\) are discussed here.

Frequency response for for pitch and plunge responses at \(U_{fold}\) = 7 m/s (Backward Sweep), \(\alpha _{pre}(^\circ )\) = \(20^\circ\) and \(\overline{\omega }\) = 0.67. (a) LFS and (b) HFS.
The frequency responses for both LFS and HFS are shown in Fig. 16, and the corresponding time histories are presented in Fig. 17. At U =7 m/s, the FFT for the LFS shows a response peak at 0.13 Hz (see Fig. 16a). The HFS exhibits a dominant frequency peak at 4.19 Hz (see Fig. 16b). The LFS shows a modulated amplitude pattern with a non-stationary mean, with the strength of the LFS being significantly higher in the plunge mode (see Fig. 17b) compared to the pitch mode (see Fig. 17a). In contrast, the HFS demonstrates LCOs throughout the time history for both pitch and plunge modes.

Low, high and original frequency signals at \(U_{fold}\) = 7 m/s (Backward Sweep), \(\alpha _{pre}(^\circ )\) = \(20^\circ\) and \(\overline{\omega }\) = 0.67. (a) pitch and (b) plunge responses.

Frequency-specific synchronization analysis: phase difference time variation and corresponding overlapped pitch and plunge time histories at \(U_{fold}\) = 7 m/s, \(\alpha _{pre}(^\circ )\) = \(20^\circ\) and \(\overline{\omega }\) = 0.67. (a) original signal, (b) low frequency signal, and (c) high frequency signal.
For better visualization, the overlapping time histories of the original signal (OS), higher frequency signal (HFS), and lower frequency signal (LFS), along with the corresponding \(\Delta \phi\) time responses, are presented for U = 7 m/s in Fig. 18a–c, respectively. At U = 7 m/s, the \(\Delta \phi\) time history for the OS shows complete asynchrony, with the phase locking value (PLV) decreasing to 0.25 (see Fig. 18a). In contrast, the LFS exhibits intermittent phase synchronization, with the PLV increasing to 0.75 (see Fig. 18b). On the other hand, the HFS remains perfectly synchronized, with a PLV of 0.98 (see Fig. 18c), as the pitch and plunge time signals remain nearly out of phase over time.
These observations suggest that, despite the apparent asynchrony between the pitch and plunge modes in the original signal, there exists strong underlying synchronization within the HFS components and intermittent phase synchronization within the LFS components of the pitch and plunge modes. This underlying synchrony and intermittent phase synchronization between the intrinsic modes contribute to the observed low-amplitude LCO oscillations.
However, in our study, we have focused on experimentally investigating the system’s behavior under varying preset angles and frequency ratios, without relying on a full mathematical model. It is important to note that, the mathematical model of dynamic stall at low Mach regimes is still an evolving topic of research50,72,73,74. The other mathematical tools towards a full-fledged bifurcation study would be incumbent on the availability of the so-called Leishman-Beddoes (LB) semi-empirical dynamic stall model at low Mach number values and is a topic of on-going investigation by the authors.
Concluding remarks
This study systematically examines the variations in preset angles and frequency ratios that influence the stall flutter behaviour of aeroelastic systems, with a particular focus on the interactions between pitch and plunge modes. Understanding the dynamics of pitch and plunge modes is crucial, as their coupling can significantly affect the onset and severity of stall flutter. To analyze these complex interactions, we employ a synchronization framework that allows for a detailed assessment of the impact of preset angles and frequency ratios on the system dynamics. This framework facilitates the identification of phase relationships and frequency-specific interactions between the modes, providing insights into the nonlinear behaviours that lead to stall flutter. By systematically varying the preset angles and frequency ratios, we investigate their effects on the synchronization characteristics of the system at higher preset angles, thereby enhancing our understanding of the conditions that precipitate stall flutter. The key findings of the study are as follows:
-
For the reference case of \(\overline{\omega }\) = 0.67, conventional routes to stall flutter have been illustrated across various preset angles of incidence. It is observed that as the preset angle increases, the subcritical regime decreases, leading to a reduction in the flutter velocity.
-
As the preset angle increases to \(20^\circ\), both low- and high-amplitude LCOs are observed, with pitch-dominated frequency. This suggests that a light stall event may occur, as the pitch amplitudes remain small and do not surpass the static stall counterparts.
-
The experiments are conducted by systematically varying the pitch stiffness while maintaining a constant plunge stiffness, resulting in different values of the frequency ratio (\(\overline{\omega }\)). It is observed that Increasing the preset angle to \(20^\circ\) results in a significant shift in the bifurcation characteristics, leading to a considerably shallower subcritical regime and, the system’s response dynamics undergo a transition, with the subcritical bifurcation evolving towards a normal supercritical Hopf bifurcation.
-
The variation of the frequency ratio (\(\overline{\omega }\)) with different preset angles of incidence gives rise to a series of bifurcation scenarios. The critical velocity \(U_{cr}\) does not vary linearly with (\(\overline{\omega }\)), indicating that the onset of flutter is influenced by the individual pitch and plunge stiffness, the preset angle, and the associated nonlinearities.
-
The synchronization analysis reveals strong synchronization between the pitch and plunge modes for preset angles ranging from \(0^\circ\) to \(15^\circ\). However, an asynchrony regime is observed at the \(20^\circ\) preset angle for certain flow speeds. Therefore, a frequency-specific synchronization analysis is conducted. The original pitch and plunge signals are decomposed into lower-frequency signals (LFS) and higher-frequency signals (HFS).
-
At \(U_{fold}\) with a \(20^\circ\) preset angle, strong underlying synchronization is observed between the HFS–HFS components, along with intermittent phase synchronization between the LFS–LFS components of the pitch and plunge modes. This synchronization and intermittent phase locking between the intrinsic modes contribute to the low-amplitude LCO oscillations.
This study is perhaps the first to apply synchronization theory to experimentally observed stall flutter across different preset angles and frequency ratios and to provide insights into the transitions within the subcritical region. The findings from this study have significant implications for the design and optimization of aeroelastic systems. By identifying the preset angles and frequency ratios that influence the stall flutter behaviour, our research contributes to improving the predictive accuracy of stall flutter models, which is essential for real-world applications where these parameters vary dynamically. Moreover, understanding the interactions and synchronization between pitch and plunge modes aids in optimizing wing designs and mitigating the risk of instabilities. Ultimately, the insights gained to support the development of enhanced design practices and operational strategies, thereby improving the safety and reliability of aerospace structures subjected to dynamic loading conditions.
Data availability
The data that support the findings of this study are available from the corresponding author upon reasonable request.
References
McCroskey, W. J., Carr, L. W. & McAlister, K. W. Dynamic stall experiments on oscillating airfoils. AIAA J. 14, 57–63 (1976).
Sarkar, S., Witteveen, J., Loeven, A. & Bijl, H. Effect of uncertainty on the bifurcation behavior of pitching airfoil stall flutter. J. Fluids Struct. 25, 304–320 (2009).
Devathi, H. & Sarkar, S. Study of a stall induced dynamical system under gust using the probability density evolution technique. Comput. Struct. 162, 38–47 (2016).
dos Santos, C. R. & Marques, F. D. Stall-induced oscillations of typical aeroelastic sections in low airspeeds. In AIAA J., 0610 (2019).
Tripathi, D., Vishal, S., Bose, C. & Venkatramani, J. Stall-induced fatigue damage in nonlinear aeroelastic systems under stochastic inflow: Numerical and experimental analyses. Int. J. Non-Linear Mech. 104003 (2022).
Xu, Z. et al. Digital mapping of surface turbulence status and aerodynamic stall on wings of a flying aircraft. Nat. Commun. 14, 2792 (2023).
Poirel, D., Goyaniuk, L. & Benaissa, A. Frequency lock-in in pitch-heave stall flutter. J. Fluids Struct. 79, 14–25 (2018).
Benaissa, A., Biskri, S., Goyaniuk, L., Poirel, D. & Bouda, N. N. Beating phenomenon in frequency lock-in 2dof stall flutter. J. Fluids Struct. 100, 103176 (2021).
Goyaniuk, L., Poirel, D. & Benaissa, A. Pitch-heave symmetric stall flutter of a naca0012 at transitional reynolds numbers. AIAA J. 58, 3286–3298 (2020).
Razak, N. A., Andrianne, T. & Dimitriadis, G. Flutter and stall flutter of a rectangular wing in a wind tunnel. AIAA J. 49, 2258–2271 (2011).
Bichiou, Y., Nuhait, A., Abdelkefi, A. & Hajj, M. Unsteady aeroelastic behaviors of rigid airfoils with preset angles of attack. J. Vib. Control 22, 1010–1022 (2016).
dos Santos, C. R., Pereira, D. A. & Marques, F. D. On limit cycle oscillations of typical aeroelastic section with different preset angles of incidence at low airspeeds. J. Fluids Struct. 74, 19–34 (2017).
Nan, G., Ding, D. & Wang, W. Aeroelastic analysis of preset angle for a typical airfoil section with cubic nonlinear stiffness. In J. Phys. Conf. Ser. 1300, 012100 (2019).
Sarkar, S. & Venkatraman, K. Influence of pitching angle of incidence on the dynamic stall behavior of a symmetric airfoil. Eur. J. Mech. B/Fluids 27, 219–238 (2008).
Fu, B., Yang, Y., Qi, H., Xu, J. & Wang, S. Modeling and analysis of high aspect ratio wing considering random structural parameters. Sci. Rep. 11, 15609 (2021).
Dimitriadis, G. & Li, J. Bifurcation behavior of airfoil undergoing stall flutter oscillations in low-speed wind tunnel. AIAA J. 47, 2577–2596 (2009).
Rangarajan, S., Tripathi, D. & Venkatramani, J. Non-normality and transient growth in stall flutter instability. Chaos 33 (2023).
Lü, L., Hu, Y., Wang, X., Ling, L. & Li, C. Dynamical bifurcation and synchronization of two nonlinearly coupled fluid-conveying pipes. Nonlinear Dyn. 79, 2715–2734 (2015).
Tomac, M. N. & Gregory, J. W. Phase-synchronized fluidic oscillator pair. AIAA J. 57, 670–681 (2019).
Manoj, K. et al. Synchronization route to weak chimera in four candle-flame oscillators. Phys. Rev. E 100, 062204 (2019).
Mondal, S., Unni, V. R. & Sujith, R. Onset of thermoacoustic instability in turbulent combustors: an emergence of synchronized periodicity through formation of chimera-like states. J. Fluid Mech. 811, 659–681 (2017).
Mondal, S., Pawar, S. & Sujith, R. Synchronous behaviour of two interacting oscillatory systems undergoing quasiperiodic route to chaos. Chaos 27 (2017).
Moon, K., Guan, Y., Li, L. K. & Kim, K. T. Mutual synchronization of two flame-driven thermoacoustic oscillators: dissipative and time-delayed coupling effects. Chaos 30 (2020).
Penelet, G. & Biwa, T. Synchronization of a thermoacoustic oscillator by an external sound source. Am. J. Phys. 81, 290–297 (2013).
Jelles, B. et al. Global dynamical analysis of the EEG in Alzheimer’s disease: frequency-specific changes of functional interactions. Clin. Neurophysiol. 119, 837–841 (2008).
Hipp, J. F., Engel, A. K. & Siegel, M. Oscillatory synchronization in large-scale cortical networks predicts perception. Neuron 69, 387–396 (2011).
Kato, K. et al. Frequency-specific synchronization in the bilateral subthalamic nuclei depending on voluntary muscle contraction and relaxation in patients with Parkinson’s disease. Front. Hum. Neurosci. 10, 131 (2016).
Jin, L., Shi, W., Zhang, C. & Yeh, C.-H. Frequency nesting interactions in the subthalamic nucleus correlate with the step phases for Parkinson’s disease. Front. Physiol. 13, 890753 (2022).
Raaj, A., Venkatramani, J. & Mondal, S. Synchronization of pitch and plunge motions during intermittency route to aeroelastic flutter. Chaos 29 (2019).
Vishal, S., Raaj, A., Bose, C. & Venkatramani, J. Routes to synchronization in a pitch-plunge aeroelastic system with coupled structural and aerodynamic nonlinearities. Int. J. Non-Linear Mech. 135, 103766 (2021).
Tripathi, D., Shreenivas, R., Bose, C., Mondal, S. & Venkatramani, J. Experimental investigation on the synchronization characteristics of a pitch-plunge aeroelastic system exhibiting stall flutter. Chaos 32 (2022).
Tripathi, D., Mondal, S. & Venkatramani, J. Frequency-specific phase synchronization analysis of a stall-induced aeroelastic system undergoing 2: 1 internal resonance in a low-speed wind tunnel. Nonlinear Dyn. 111, 12899–12920 (2023).
Tripathi, D., Bose, C., Mondal, S. & Venkatramani, J. Effect of structural parameters on the synchronization characteristics in a stall-induced aeroelastic system. J. Fluids Struct. 133, 104246 (2025).
Sweeney-Reed, C. M., Nasuto, S. J., Vieira, M. F. & Andrade, A. O. Empirical mode decomposition and its extensions applied to EEG analysis: a review. Adv. Data Sci. Adapt. Anal. 10, 1840001 (2018).
Sweeney-Reed, C. M. & Nasuto, S. J. A novel approach to the detection of synchronisation in EEG based on empirical mode decomposition. J. Comput. Neurosci. 23, 79–111 (2007).
Lachaux, J.-P., Rodriguez, E., Martinerie, J. & Varela, F. J. Measuring phase synchrony in brain signals. Hum. Brain Mapp. 8, 194–208 (1999).
Schroeder, R. T., Croft, J. L. & Bertram, J. E. Amplitude and frequency of human gait synchronization with a machine oscillator system. Sc. Rep. 15, 1–14 (2025).
Bowman, A., Barnes, G. & Keshmiri, S. An empirical method for estimating moments of inertia of light unmanned air vehicles. In Infotech@ Aerosp. 2012, 2598 (2012).
Venkatramani, J., Sarkar, S. & Gupta, S. Investigations on precursor measures for aeroelastic flutter. J. Sound Vib. 419, 318–336 (2018).
Venkatramani, J., Nair, V., Sujith, R., Gupta, S. & Sarkar, S. Precursors to flutter instability by an intermittency route: a model free approach. J. Fluids Struct. 61, 376–391 (2016).
Godavarthi, V. et al. Synchronization transition from chaos to limit cycle oscillations when a locally coupled chaotic oscillator grid is coupled globally to another chaotic oscillator. Chaos 30 (2020).
Rosenblum, M. G., Pikovsky, A. S. & Kurths, J. From phase to lag synchronization in coupled chaotic oscillators. Phys. Rev. Lett. 78, 4193 (1997).
Fan, J., Li, Y. & Yang, J. Nonlinear forced vibration and synchronization behavior of pipe-in-pipe system. Int. J. Mech. Sci. 291, 110089 (2025).
Jia, L., Wang, C. & Liu, Z. Multifrequency controlled synchronization of four inductor motors by the fixed frequency ratio method in a vibration system. Sci. Rep. 13, 2467 (2023).
Hachijo, T., Gotoda, H., Nishizawa, T. & Kazawa, J. Early detection of cascade flutter in a model aircraft turbine using a methodology combining complex networks and synchronization. Phys. Rev. Appl. 14, 014093 (2020).
Aswathy, M. & Sarkar, S. Frequency characteristics and phase dynamics of a stochastic vortex induced vibration system. J. Sound Vib. 509, 116230 (2021).
Mondal, R., Bose, C. & Mondal, S. Synchronization study on vortex-induced vibrations using wake oscillator model. In Advances in Nonlinear Dynamics:(NODYCON 2021), Vol. 1, 65–74 (Springer, 2021).
Mondal, S., Pawar, S. A. & Sujith, R. Synchronization transition in a thermoacoustic system: Temporal and spatiotemporal analyses. In Energy for Propulsion: A Sustainable Technologies Approach, 125–150 (Springer, 2018).
Guan, Y., Gupta, V., Wan, M. & Li, L. K. Forced synchronization of quasiperiodic oscillations in a thermoacoustic system. J. Fluid Mech. 879, 390–421 (2019).
dos Santos, L. & Marques, F. Improvements on the Beddoes-Leishman dynamic stall model for low speed applications. J. Fluids Struct. 106, 103375 (2021).
Huang, C., Zheng, G., Nie, X. & Yang, G. Supercritical and subcritical aeroelastic behaviors of a three-dimensional wing coupled with a nonlinear energy sink. Int. J. Non-Linear Mech. 161, 104692 (2024).
Etikyala, S. & Sujith, R. Change of criticality in a prototypical thermoacoustic system. Chaos 27 (2017).
Lesne, A., Lagües, M., Lesne, A. & Laguës, M. Dynamical systems, chaos and turbulence. In Scale Invariance: From Phase Transitions to Turbulence 293–344 (2012).
Balasubramanian, K. & Sujith, R. I. Thermoacoustic instability in a rijke tube: Non-normality and nonlinearity. Phys. Fluids 20 (2008).
Kumar, M. & Gupta, S. Route to synchronization in coupled phase oscillators with frequency-dependent coupling: Explosive or continuous?. Phys. Rev. E 106, 044310 (2022).
Shi, Z., Pu, D., Wang, X., Wei, X. & Huan, R. Synchronization process expediting in nonlinear oscillators via reconfiguration of the potential well pattern. Int. J. Mech. Sci. 260, 108642 (2023).
Strzalko, J., Grabski, J., Wojewoda, J., Wiercigroch, M. & Kapitaniak, T. Synchronous rotation of the set of double pendula: Experimental observations. Chaos 22 (2012).
Zhuang, Y. & Yuan, G. Study on coupled mode flutter parameters of large wind turbine blades. Sci. Rep. 14, 12804 (2024).
Shenhav Feigin, D. & Shoshani, O. Synchronization of non-weakly coupled aeroelastic oscillators. Commun. Phys. 7, 211 (2024).
Moreno, C. R., Couliou, M., Fabbiane, N., Bur, R. & Marquet, O. Synchronized shock wave and compliant wall interactions: Experimental characterization and aeroelastic modeling. J. Fluids Struct. 128, 104142 (2024).
Lee, S., Kuklinski, L. J. & Timme, M. Extreme synchronization transitions. Nat. Commun. 16, 1–7 (2025).
Jia, L., Tian, Y., Liu, Z. & Zhang, X. Controlled synchronization of three co-rotating exciters based on a circular distribution in a vibratory system. Sci. Rep. 14, 5026 (2024).
Rosenblum, M., Pikovsky, A., Kurths, J., Schäfer, C. & Tass, P. A. Phase synchronization: from theory to data analysis. In Handbook of Biological Physics, vol. 4, 279–321 (Elsevier, 2001).
Boccaletti, S., Kurths, J., Osipov, G., Valladares, D. & Zhou, C. The synchronization of chaotic systems. Phys. Rep. 366, 1–101 (2002).
Pawar, S. A. et al. Spatiotemporal patterns corresponding to phase synchronization and generalized synchronization states of thermoacoustic instability. Chaos 34 (2024).
Raj, A., Raaj, A., Venkatramani, J. & Mondal, S. Effect of parameter mismatch and dissipative coupling on amplitude death regime in a coupled nonlinear aeroelastic system. Chaos 31 (2021).
Paul Asir, M., Sathiyadevi, K., Philominathan, P. & Premraj, D. A nonlinear memductance induced intermittent and anti-phase synchronization. Chaos 32 (2022).
Srikanth, S., Pawar, S. A., Manoj, K. & Sujith, R. Dynamical states and bifurcations in coupled thermoacoustic oscillators. Chaos 32 (2022).
Basta, E., Gupta, S. K. & Barry, O. Frequency lock-in control and mitigation of nonlinear vortex-induced vibrations of an airfoil structure using a conserved-mass linear vibration absorber. Nonlinear Dyn. 112, 8789–8809 (2024).
Honari-Latifpour, M., Ding, J., Belykh, I. & Miri, M.-A. Spectral principle for frequency synchronization in repulsive laser networks and beyond. Chaos 35 (2025).
Shoshani, O. & Shaw, S. W. Nonlinear interactions between vibration modes with vastly different eigenfrequencies. Commun. Phys. 6, 213 (2023).
Boutet, J., Dimitriadis, G. & Amandolese, X. A modified Leishman-Beddoes model for airfoil sections undergoing dynamic stall at low Reynolds numbers. J. Fluids Struct. 93, 102852 (2020).
Galvanetto, U., Peiro, J. & Chantharasenawong, C. An assessment of some effects of the nonsmoothness of the Leishman-Beddoes dynamic stall model on the nonlinear dynamics of a typical aerofoil section. J. Fluids Struct. 24, 151–163 (2008).
Melani, P., Aryan, N., Greco, L. & Bianchini, A. The Beddoes-Leishman dynamic stall model: Critical aspects in implementation and calibration. Renew. Sustain. Energy Rev. 202, 114677 (2024).
Acknowledgements
The authors would like to acknowledge Shiv Nadar Institution of Eminence for its support and academic environment that facilitated this work.
Funding
Open access funding provided by Shiv Nadar University. Dr. J Venkatramani is grateful for the financial support received from the SERB core research grant (No. CRG/2022/001609) and the institute seed grant from Indian Institute of Information Technology Design and Manufacturing, Kancheepuram (File No. IIITDM/ISG/2024/ME/02) for this research work.
Author information
Authors and Affiliations
Contributions
Sourabh Kumar: Conceptualization, methodology, formal analysis, investigation, writing—original draft. J. Venkatramani: Supervision, validation,investigation, writing—review and editing. Ankit Gupta: Visualization, investigation, writing—review and editing.
Corresponding author
Ethics declarations
Competing Interests
The authors declare no competing interests.
Additional information
Publisher’s note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Supplementary Information
Rights and permissions
Open Access This article is licensed under a Creative Commons Attribution-NonCommercial-NoDerivatives 4.0 International License, which permits any non-commercial use, sharing, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons licence, and indicate if you modified the licensed material. You do not have permission under this licence to share adapted material derived from this article or parts of it. The images or other third party material in this article are included in the article’s Creative Commons licence, unless indicated otherwise in a credit line to the material. If material is not included in the article’s Creative Commons licence and your intended use is not permitted by statutory regulation or exceeds the permitted use, you will need to obtain permission directly from the copyright holder. To view a copy of this licence, visit http://creativecommons.org/licenses/by-nc-nd/4.0/.
About this article

Cite this article
Kumar, S., Venkatramani, J. & Gupta, A. Bifurcation and synchronization analysis in a stall-flutter aeroelastic system under varying preset angles and frequency ratios. Sci Rep 15, 33186 (2025). https://doi.org/10.1038/s41598-025-17520-1
Received:
Accepted:
Published:
DOI: https://doi.org/10.1038/s41598-025-17520-1
