
Abstract
This study provides a comprehensive evaluation of maintenance strategies for production systems subjected to stochastic degradation, with a comparative analysis of both traditional and advanced approaches. Traditional models, such as block replacement (BR) and quantile-based inspection and replacement (QIR), are critically examined in terms of their cost-effectiveness and robustness. While BR relies on fixed replacement intervals, QIR dynamically adjusts inspection schedules based on system degradation profiles, aiming to optimize maintenance expenditures and enhance system availability. However, as industrial systems grow increasingly complex, there is a clear need for more advanced maintenance strategies that offer superior performance and adaptability. In this context, the study explores advanced strategies, including the proportional hazards model (PHM) for condition-based maintenance (CBM), reinforcement learning-based maintenance (RL-M), and hybrid predictive–preventive maintenance (PPM). PHM-CBM leverages real-time degradation data for dynamic and optimal scheduling, RL-M utilizes machine learning algorithms to iteratively refine maintenance decisions, and Hybrid PPM integrates predictive analytics with preventive actions to ensure consistent cost control and system reliability. To facilitate a rigorous evaluation, this study proposes a novel cost criterion that integrates long-term cost rate projections with the variability observed across renewal cycles, providing a balanced assessment of both performance and robustness. The analysis is conducted using Monte Carlo simulations and stochastic renewal theory, offering a benchmark for comparing the various maintenance strategies. Ultimately, the study underscores the importance of further quantitative comparisons between advanced and traditional maintenance policies.
Similar content being viewed by others
Introduction
The escalating competition within industrial sectors has driven organizations to critically reassess and optimize their maintenance strategies for production systems1,2. While modern industrial equipment has benefited from advancements in design, which have enhanced reliability, these systems remain inherently susceptible to degradation over time. This degradation significantly compromises production efficiency, product quality, and increases operational costs3,4. The stochastic nature of degradation processes necessitates the adoption of proactive maintenance strategies aimed at enhancing system reliability, mitigating failures, and optimizing overall operational performance. Without a comprehensive maintenance plan, frequent breakdowns and extended downtimes can severely disrupt production capacity, thereby diminishing a firm’s competitive position. As such, the optimization of maintenance strategies has emerged as a central focus within both academic research and industrial practice in recent decades5.
Traditional maintenance models, such as BR and QIR, have long been employed as methods for managing system failures. BR, which operates on fixed time intervals for replacements, is straightforward yet often results in excessive maintenance costs and inefficient downtime management6. On the other hand, QIR, a condition-based strategy, optimizes inspection and replacement intervals by adjusting them based on predefined degradation thresholds, thereby striving to balance maintenance costs with system availability7. However, despite their widespread application, these traditional approaches often fail to fully capture the complexities of modern production systems, which are characterized by substantial variability in degradation rates and operational conditions, necessitating more flexible and adaptive maintenance strategies.
In response to these limitations, advanced maintenance strategies leveraging predictive analytics and intelligent decision-making frameworks have emerged. The proportional hazards model (PHM) for CBM dynamically adjusts maintenance schedules based on real-time degradation data, minimizing the likelihood of unexpected failures and optimizing the timing of interventions8. Reinforcement learning-based maintenance (RL-M) integrates machine learning algorithms that continuously refine maintenance policies based on evolving system performance, thereby improving cost efficiency and system reliability9. Additionally, hybrid predictive–preventive maintenance (PPM) combines both predictive and preventive approaches, ensuring consistent cost control and adaptability across various industrial contexts10. These advanced strategies offer more precise, data-driven solutions capable of addressing the complexities and variability inherent in contemporary production systems.
This study makes several significant contributions to the field. First, it presents a comparative analysis of traditional and advanced maintenance strategies11, offering valuable insights into their respective advantages and limitations within diverse industrial contexts. Second, the study introduces a novel cost evaluation framework that integrates long-term maintenance cost projections with observed variability across renewal cycles, providing a more comprehensive assessment of maintenance performance12. Third, the research utilizes Monte Carlo simulations and stochastic renewal theory to rigorously evaluate these strategies under realistic operational conditions, offering a robust decision-making framework for practitioners. Finally, the study highlights the importance of exploring hybrid decision-making models and multi-objective optimization techniques, which can more effectively balance cost, reliability, and downtime in modern production systems13.
This paper is structured as follows: “Introduction” section introduces the research motivation, objectives, and contributions. In “Degradation and failure model” section delves into the degradation and failure models used in the study. In “Maintenance strategies and cost models” section presents assumptions and cost models for the BR and QIR strategies. In “Maintenance strategies assessment” section assesses the performance of both traditional and advanced maintenance strategies. In “Maintenance strategies comparisons” section offers a detailed comparison of BR and QIR using the newly proposed cost evaluation criterion. Finally, “Conclusion and perspectives” section concludes the study, offering insights and proposing future research directions.
Degradation and failure model
This study focuses on the analysis of a production system subject to a deteriorating process driven by random failures, which are influenced by both its usage and aging. The degradation process of the system follows a stochastic model, meaning that it evolves probabilistically over time. The system’s functionality ceases once its degradation level exceeds a predefined threshold, which is established based on the system’s inherent characteristics or the required quality of the final product.
To conceptualize this, consider a production line as a representative example. In this case, the degradation of the production line can be associated with an increasing rate of defective products being produced. The system failure is defined as the point when the rate of defective products surpasses an unacceptable threshold. It is important to note that system failure in this context does not necessarily imply a total breakdown of the entire system. Rather, it indicates the moment at which the system is no longer able to perform its intended function within acceptable parameters, despite still being technically operational.
In order to prevent system failure, various maintenance actions are implemented, including inspection, testing, repair, and replacement. From a maintenance perspective, a production system, even if composed of multiple components, can be treated as a cohesive unit with critical components or a set of interrelated components14. This approach enables the system’s state at any given time, t ≥ 0, to be represented as a single scalar random degradation variable, denoted as Xt. Initially, when the system is in its pristine state, Xt is assigned a value of zero.
In the absence of repair or replacement actions, the degradation variable {Xt}t≥0 represents a continuously evolving stochastic process. This process progressively increases, reflecting the ongoing deterioration of the system. Furthermore, assuming that the degradation increment between two time points, t and (where t ≤ s), denoted as Xs − Xt, is independent of prior degradation levels, it is feasible to model the progression of the system’s degradation using a monotonically increasing stochastic process from the Lévy family15.
In this study, we focus on the use of a well-established degradation modeling technique known as the uniform Gamma process, characterized by its shape parameter a and scale parameter b. The adoption of this process for degradation modeling is supported by its widespread recognition and extensive application in various practical domains, as well as its endorsement by experts in the field16. A notable advantage of using the uniform Gamma process lies in its well-defined probability density function, which facilitates robust mathematical analysis and further advancements in modeling.
Specifically, when considering two time points, t and s (with t ≤ s), the increase in degradation, represented as Xs − Xt, follows a Gamma distribution according to the uniform Gamma process. The Gamma distribution is characterized by its shape and scale parameters, a and b, respectively. This distribution is a versatile and widely used probabilistic model, particularly in the context of degradation processes17.
The use of the uniform Gamma process provides several advantages in the context of degradation modeling. First, the Gamma distribution offers a flexible framework to accurately capture the behavior of degradation increments, allowing for a comprehensive analysis of the system’s degradation trajectory. Furthermore, the well-defined probability density function associated with the Gamma distribution enables the derivation of analytical expressions, the establishment of performance metrics, and facilitates decision-making based on rigorous quantitative assessments.
The probability density function for the degradation increment Xs − Xt between two time points t and s is expressed as18:
And the survival function is:
In these expressions of Eqs. (1) and (2):
-
\(\alpha (s - t)\) represents the probability density function of the degradation increment.
-
\(f_{\alpha (s - t),\beta } (x)\) is the shape parameter, which depends on the difference between the time points t and s.
-
α is the shape parameter.
-
β is the scale parameter.
-
Γ(α(s − t)) is the Gamma function evaluated at α(s − t), normalizing the distribution.
-
The term \(1_{x \ge 0}\) is the indicator function, ensuring that the probability density is defined only for x ≥ 0, as the degradation increment cannot be negative.
This formulation represents a Gamma distribution, which is commonly used to model degradation processes in systems subject to stochastic failure.
In the context of degradation and failure modeling, the functions Γ(α) and Γ(α,x) represent the complete and upper incomplete Gamma functions, respectively, and are defined as follows:
Here, the complete Gamma function Γ(α) integrates the function zα−1e−z from zero to infinity, while the upper incomplete Gamma function Γ(α,x) integrates the same function from x to infinity. These functions are fundamental in probabilistic modeling, particularly in characterizing degradation processes where the underlying phenomenon follows a random and time-dependent evolution.
Additionally, the notation 1{⋅} represents the indicator function, a widely used mathematical construct. This function outputs a value of 1 if the argument is true and 0 otherwise. The indicator function provides an elegant means to express conditional relationships or specific events within mathematical formulations, thereby simplifying the representation of piecewise functions or constraints in a concise manner.
In this study, we focus on simulating the degradation behavior of a system by incorporating two key parameters, α and β, which offer a flexible framework for modeling a broad spectrum of degradation behaviors, ranging from predictable trends to highly erratic patterns. These parameters are crucial for defining the average rate of degradation and the variability in the system’s deterioration process.
The average degradation rate of the system is given by the ratio α/β, where α denotes the degradation rate and β quantifies the inherent variability or randomness in the degradation process. A larger value of α relative to β implies a higher average degradation rate, while a smaller β relative to α indicates greater fluctuation in the degradation process.
The variance of the degradation is expressed by the ratio α/β2. A higher α relative to β2 signifies increased variability in the degradation process, resulting in a wider distribution of possible degradation outcomes.
When available, degradation data can be used to estimate the values of α and β through traditional statistical methods such as maximum likelihood estimation or method of moments. These estimation techniques enable the derivation of the most probable values of α and β, thereby providing a more precise characterization of the system’s degradation dynamics based on empirical data.
In the context of degradation modeling, we employ a threshold-based framework to define system failure. This paradigm incorporates both economic and safety considerations to determine the point at which a system is deemed to have failed. Economic factors (such as suboptimal product quality or excessive raw material consumption) and safety concerns (such as the risk of catastrophic failures) play a pivotal role in this decision-making process.
A system is considered to have failed when its degradation reaches a critical threshold, L, at which point the system can no longer fulfill its intended function within acceptable parameters, even if it remains operational. This approach allows for the recognition that significant deterioration, although the system may still be technically functioning, is undesirable due to the associated economic or safety implications.
Let τL represent the random failure time of the system, which is mathematically defined as19:
where Xt denotes the degradation level at time t, and L is the critical threshold. The probability density function of τL, the time at which the system exceeds the threshold L, is given by:
In this equation, \(\psi (\nu ) = \frac{\partial }{\partial \nu }\ln (\Gamma (\nu ))\) represents the digamma function, which is the derivative of the logarithm of the Gamma function. The digamma function plays an important role in evaluating the behavior of the degradation process and its influence on the system’s failure dynamics.
Maintenance strategies and cost models
In this section, we direct our attention to two specific maintenance strategies: the QIR and the BR. Initially, we will define the key assumptions that underpin the system being maintained. Subsequently, we will outline the decision-making criteria pertinent to each of the aforementioned strategies. Lastly, we will present the formulation process for calculating the maintenance cost per renewal cycle (MCPRC) for both strategies20.
Maintenance assumptions
Inspection and replacement are fundamental maintenance interventions for the considered production system. The system’s degradation state remains concealed, with no inherent alert mechanism to indicate its impending failure. Therefore, inspection plays a pivotal role in revealing both the degradation level and the operational or failure status of the system.
Inspection encompasses more than mere data collection; it involves the extraction of relevant features from the gathered data, the formulation of degradation indicators, and, where necessary, the execution of comprehensive tasks. These activities serve as preliminary steps that precede the maintenance decision-making phase in a CBM program. While inspections incur costs and demand time, these expenses are relatively minor when considered in the broader context of the system’s life cycle.
For the sake of modeling, it is assumed that each inspection operation is instantaneous, flawless, and does not affect the system’s functioning. Furthermore, a fixed cost (Ci > 0) is associated with each inspection, reflecting the resources allocated for its execution.
In terms of replacement, the production system may undergo either proactive replacement while still operational or reactive replacement following a failure. The replacement process is typically rapid, encompassing actions such as physical substitution, extensive overhaul, or repair to restore the system to a state comparable to its original condition.
In practical terms, the costs associated with preventive replacement (PR) and corrective replacement (CR) may not be identical. Preventive replacement (PR), which is often unscheduled and may lead to environmental impact, tends to incur higher costs than corrective replacement (CR). Additionally, even when the same type of maintenance tasks are employed, maintenance on a more deteriorated system is likely to involve more intricate, and consequently more expensive, procedures.
Let Cp(Xt) and Cc(Xt) represent the costs associated with preventive and corrective replacement at time t, respectively. These costs are increasing functions of the degradation level Xt, and the following relationship holds: 0 < Ci < Cp(Xt) < Cc(Xt). This relationship reflects the escalating costs as the degradation of the system intensifies.
Moreover, replacements can only occur at pre-established discrete intervals for economic reasons. For instance, under the BR policy, replacements occur at fixed, periodic intervals, whereas in the PIR and QIR policies, replacements are triggered by inspections. As a result, following a failure, there is a period of system downtime, and additional costs are incurred from the moment of failure until the next replacement. These additional costs are represented by a constant cost rate (Cd > 0).
Given these factors and assumptions, maintenance decision-makers are tasked with developing strategies that efficiently manage maintenance activities, minimize costs, and ensure the reliability and optimal performance of the production system.
Maintenance strategies
To maintain the availability of production systems while optimizing costs, it is imperative to implement maintenance policies that systematically organize and coordinate maintenance activities in a cost-effective manner. In this section, we will delineate the decision frameworks of two representative maintenance strategies: the TBM strategy, exemplified by the BR policy, and the CBM strategy, represented by the QIR policy. These frameworks provide distinct approaches for managing system reliability and cost efficiency, each tailored to different operational conditions and performance objectives.
Block replacement strategy (BR)
The example presented here illustrates a TBM policy, specifically the BR strategy. The decision framework of this policy is relatively simple and is primarily based on fixed calendar time intervals, denoted as T.
In the BR strategy, the system is periodically replaced at fixed intervals of kT, where k = 1, 2, …, based on the predetermined time period T. There are two scenarios for replacement:
-
Proactive replacement: If, at the designated replacement time kT, the system’s degradation level Xt is below a predefined threshold L (i.e., XkT < L), the replacement is conducted proactively. This means that the component or system is still operational and has not reached a critical state or experienced significant degradation. By replacing the component proactively, the aim is to prevent potential failures and ensure the system’s continued operation.
-
Reactive replacement: If, at the replacement time kT, the system’s degradation level Xt exceeds or equals the predefined threshold L (i.e., XkT ≥ L), the replacement is performed reactively. This indicates that the component or system has malfunctioned or reached a critical state of degradation. Reactive replacements are carried out to restore the system’s functionality and performance after a failure or significant degradation has occurred.
The replacement period T is the crucial factor in the BR policy. It determines the frequency at which replacements are scheduled, and the decision to replace is solely based on the predefined threshold L and the system’s degradation level at the designated time kT.
The BR policy in TBM provides a simple and deterministic approach to maintenance scheduling. However, it does not take into account the real-time condition of the system or its components. As a result, it may lead to unnecessary replacements if the system’s degradation is slower than anticipated or missed replacements if the degradation is faster than expected. The optimization of replacement period T is a key consideration in the BR policy to balance the costs of replacements and the risk of failures.
Quantile-based inspection and replacement policy (QIR)
One of the simplest CBM strategies is the QIR approach, where inspection intervals are synchronized with PR and CR operations. The decision to replace is determined based on the degradation level XTk at the inspection time TkT, (where k = 1, 2, …):
-
If XTk ≥ L, the system has malfunctioned and must be rectified by replacing it with a new one at time Tk.
-
The system is still operational if M ≤ XTk < L, but it is deemed too compromised and ought to be replaced in advance with a new one at time Tk.
-
No action is done at Tk if XTk < M, indicating that the system is still deemed healthy.
Furthermore, the system is examined by the QIR policy based on a quantile schedule that is determined by the parameter α, with 0 < α < 1 is defined as follows:
The conditional reliability of the system at time t is represented by R(t|\(X_{{T_{k} }} = x_{k}\)) given the system’s degradation level at the inspection time Tk, represented by xk. In this case, XT0 = X0 = 0. The following may be done to ascertain this conditional dependability employing \({\text{ X}}_{{T_{k} }} = x_{k}\):
where \(\overline{F}_{{\alpha .\left( {t - T_{k} } \right),b}} \left( {L - x_{k} } \right)\) is given by (2). The system dependability is at least equal to α over the inspection period [Tk, Tk+1], as per formula (5). Put otherwise, the quantile-based inspection method ensures that α will be the optimum dependability level over the duration of the system.
Maintenance cost per renewal cycle
This section introduces a cost-based criterion designed for the long-term, simultaneous evaluation of both the resilience and performance of the maintenance strategies discussed previously.
To assess the robustness of the two maintenance policies under consideration, we propose the use of the maintenance cost per renewal cycle (MCPRC) as the primary metric in this study. The robustness of a policy is defined as its ability to minimize cost fluctuations between consecutive renewal cycles. While the long-term cost variance criteria outlined in21,22 can serve a similar purpose, we argue that the MCPRC provides a more comprehensive measure for financial planning in each renewal cycle. The MCPRC is defined as follows:
where S represent the length of a renewal cycle, and C(S) denote the total maintenance cost incurred during that cycle.
Since K is a random variable, we attempt to assess it using the standard deviation and mean value μ = E (K).
It appears that the resilience of the maintenance procedures decreases as σ values rise. We outline the analytical formulations for σ for the two techniques under consideration in the following sections.
Standard formulation of the MCPRC for the BR policy
Throughout the duration of a renewal cycle T, the system incurs either a PR cost if it continues to operate, or a CR cost, in addition to downtime expenses, in the event of a failure. Consequently, the MCPRC for the BR strategy can be calculated as follows:
In this case, Wd,BR stands for the system outage that happens throughout a renewal cycle in compliance with the BR approach. It is able to be stated as:
The computation of μBR and σBR uses both iterations of Wd,BR. As a result, the following are the formulae for the mean of the square E[(KBR)2] and the mean μBR = E[KBR] of MCPRC:
And
Here, Eqs. (1), (2), and (4) provide \(f_{\alpha T,\beta }\), \(\overline{F}_{\alpha t,\beta }\), and \(f_{\tau L}\), respectively. We obtain the formula for the standard deviation σBR of the MCPRC in the context of the BR strategy by substituting (11) and (12) into (8).
Standard formulation of the MCPRC for the QIR policy
In this context, we assume that at the k-th inspection period (k = 1, 2, …), the system is either replaced preventively or correctively. The MCPRC for the QIR policy over the course of a renewal cycle is given by:
where the QIR policy’s downtime of the system during a renewal cycle is acquired by:
Equation (5) determines Tk recursively. Due to the dynamic nature of the inspection schedule, calculating μQIR = E[KQIR] and E[(KQIR)2] analytically from Eq. (13) proves to be challenging. Therefore, we focus on employing a Monte Carlo simulation method to estimate the standard deviation σQIR of the Mean Cost Per Renewal Cycle (MCPRC) for the QIR policy.
Maintenance strategies assessment
This section presents a comprehensive evaluation of maintenance strategies, encompassing both traditional and advanced approaches. The comparison is extended beyond the BR and QIR strategies, incorporating contemporary maintenance policies that reflect more advanced methodologies. In particular, we contrast these conventional strategies with cutting-edge models in CBM and predictive maintenance (PdM). The models under consideration include the proportional hazards model (PHM) for CBM, reinforcement learning-based maintenance (RL-M), and hybrid predictive–preventive maintenance (PPM).
Traditional maintenance strategies assessment
The long-term expected maintenance cost rate criterion, extensively employed in the literature23, is mathematically characterized as the limit of the cumulative maintenance cost divided by the time horizon as it approaches infinity24. This criterion acts as a measure of the average maintenance cost per unit of time over the long term. It enables the evaluation and comparison of different maintenance strategies in terms of their cost efficiency and overall performance. By calculating the expected maintenance cost rate, valuable insights can be derived regarding the strategies’ effectiveness in managing costs, thus supporting informed decision-making in the optimization of maintenance operations. The mathematical representation of this criterion is as follows:
In this context, S represents the duration of a renewal cycle, and C(S) denotes the total maintenance expenditure incurred during that cycle. It is apparent that Eq. (15) does not account for the variability in maintenance costs across cycles, focusing solely on the mean values of the renewal cycle and the associated maintenance costs. In other words, evaluating maintenance strategies purely based on the long-term predicted maintenance cost rate may be insufficient for assessing their performance and robustness. To address this limitation, we propose an alternative approach: a cost criterion that integrates the standard deviation σ\sigmaσ of the maintenance cost per renewal cycle (MCPRC) with the long-term projected maintenance cost rate C∞. This can be expressed as:
In “Maintenance cost per renewal cycle” section presents the mathematical formulations for σ under both the BR approach and the QIR strategy. Since the methodology for calculating the long-term projected maintenance cost rates is largely similar for both approaches, we will not reiterate it here. For a comprehensive derivation, readers are referred to the complete formulation in25. The constant coefficient λ in Eq. (16) represents the relative weight assigned to cost variability in influencing decision-making compared to the mean cost. When λ ≤ 1, decision-makers prioritize the performance of the maintenance strategies. Conversely, when λ > 1, the emphasis shifts toward the robustness of the strategies. Thus, the proposed cost criterion provides a more balanced approach for assessing maintenance methods in terms of both robustness and performance, as opposed to relying solely on the long-term predicted maintenance cost rate. Moreover, when λ = 0, the criterion reduces to the long-term maintenance cost rate. By applying this cost criterion, both the BR and QIR strategies can be optimized by identifying the ideal decision parameters that minimize φ as described in Eq. (16).
In order to demonstrate the benefits of the new standard, let us examine a system with the following parameters: I = 0.1, β = 0.1, and L = 29. In order to keep things simple, we’ll suppose that the CR cost stays constant and that the PR cost is a quadratic function of the deterioration level. The following values may be chosen thanks to the link between maintenance costs: Cc = 98, Ci = 5, Cd = 34, and \(C_{p} \left( {X_{t} } \right)\) is:
In this case, C0 = 48 represents the base cost for PR, and is associated with a system threshold Ms = 14, which denotes the critical threshold at which system failure is deemed unacceptable. As illustrated in Table 1, when the BR strategy and the QIR approach are applied to the system under analysis, we determine their optimal configurations, long-term projected cost rates, and the corresponding standard deviations of the MCPRC for various values of λ. Notably, the standard deviation of MCPRC decreases for both strategies as λ increases, reflecting the fact that the optimization procedure now accounts for the variability in maintenance costs.
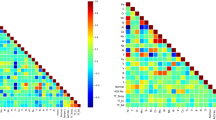
To further enhance our analysis, we have generated MCPRC histograms for both the BR and QIR strategies. These histograms, presented in Fig. 1, offer visual representations of the distribution of MCPRC values across different scenarios. The results were obtained using a Monte Carlo simulation, which was based on the previously described maintenance cost parameters. By providing a clear visual representation of how the costs fluctuate under various conditions, the histograms complement the data in Table 1, facilitating a more intuitive understanding of the results.

MCPRC histogram.
Advanced maintenance strategies assessment
Extending the comparative analysis of advanced maintenance strategies
This section currently lacks a detailed quantitative comparison with traditional maintenance policies. To address this gap, we will incorporate additional models and analyses to enhance the case studies, providing a more thorough and nuanced evaluation that underscores the differences between traditional and advanced maintenance strategies.
To overcome this limitation, we broaden the scope of comparison by extending the analysis beyond the BR and QIR strategies. This is achieved by integrating advanced models in CBM and predictive maintenance (PdM), which include:
-
Proportional hazards model (PHM) for CBM—A reliability-based approach that dynamically adjusts maintenance intervals based on system degradation trends.
-
Reinforcement learning-based maintenance (RL-M)—A data-driven adaptive strategy that learns optimal maintenance actions using real-time degradation feedback.
-
Hybrid predictive–preventive maintenance (PPM)—A model that combines statistical failure prediction with periodic maintenance scheduling to balance cost efficiency and system reliability.
The performance of each strategy is evaluated using Monte Carlo simulations and stochastic renewal processes, considering several key factors: the long-term expected maintenance cost rate (C∞) to assess cost efficiency, the maintenance cost variability (σMCPRC) to evaluate cost stability across cycles, the system downtime probability (πd) to measure system availability, and the expected remaining useful life (ERUL) to determine component reliability.
Mathematical formulation of advanced maintenance models
Proportional hazards model (PHM) for CBM
PHM assumes that failure probability depends on degradation indicators and environmental conditions. The hazard function is given by8:
where h(t∣Xt) is the failure hazard rate at time t, given degradation Xt. h0(t) is the baseline failure probability. Xi(t) is the degradation indicators (e.g., vibration, wear, temperature). Βi is the sensitivity of each degradation indicator.
A preventive maintenance action is triggered if:
where hth is the critical hazard threshold.
PHM ensures dynamic maintenance scheduling: if degradation accelerates, maintenance is triggered earlier.
Reinforcement learning-based maintenance (RL-M)
RL-M formulates maintenance as a Markov decision process (MDP)9:
where S is the system states (e.g., degradation levels, failure risk). A is the actions (e.g., inspect, repair, replace). P(s′∣s,a) is the transition probability from state s to s′ after action a. R(s,a) is the reward function (cost saviangs, reliability gain). γ is the discount factor (0 ≤ γ ≤ 1).
The optimal maintenance policy follows the Bellman equation:
where Q(s,a) represents the expected cumulative reward of performing action a in state s.
RL-M adapts dynamically based on system feedback, optimizing maintenance schedules over time.
Hybrid predictive-preventive maintenance (PPM)
Hybrid PPM integrates failure prediction with periodic inspections. The probability of failure before the next scheduled maintenance is10:
where P(Tf < Tm) is the probability of failure before maintenance time Tm. h(t∣Xt) is the hazard rate from PHM.
The optimal maintenance schedule T*m is obtained by solving10:
where Cp is the preventive maintenance cost. Cc is the corrective maintenance cost.
Hybrid PPM balances cost efficiency and reliability it schedules maintenance proactively but allows periodic inspections.
Numerical example: Monte Carlo simulation-based comparison
We evaluate our production system with the Parameters:
-
Failure threshold (L) = 29.
-
Inspection cost (Ci) = 5.
-
Corrective maintenance cost (Cc) = 100.
-
Preventive maintenance base cost (C0) = 48.
-
System downtime cost (Cd) = 34.
-
Simulation runs: 100,000 Monte Carlo iterations.
Below is an enhanced discussion of the numerical results presented in “Performance metrics of maintenance strategies” and “Sensitivity analysis of downtime cost (Cd) impact” section, providing detailed insights into the performance of maintenance strategies and their implications for decision-making.
Performance metrics of maintenance strategies
Table 2 presents a quantitative comparison of five maintenance strategies: BR, QIR, proportional hazards model (PHM-CBM), reinforcement learning-based maintenance (RL-M), and hybrid predictive–preventive maintenance (PPM)—based on key performance indicators:
-
Expected maintenance cost rate (C∞):
-
RL-M achieves the lowest C∞ (7.4), indicating superior cost efficiency compared to other strategies.
-
BR has the highest cost rate (12.4), confirming its inefficiency in balancing preventive and corrective maintenance.
-
PHM-CBM (8.9) and Hybrid PPM (8.2) significantly outperform BR, benefiting from condition-based optimization.
-
-
Maintenance cost variability (σMCPRC):
-
BR has the highest cost variability (4.3), reflecting its unpredictability in cost fluctuations due to random failures.
-
QIR, PHM, and Hybrid PPM offer moderate stability (2.7–3.1).
-
RL-M (2.1) provides the most stable cost performance, thanks to its adaptive learning mechanism.
-
-
System downtime probability (πd):
-
BR exhibits the highest downtime probability (0.23), leading to significant operational interruptions.
-
PHM-CBM (0.14) and Hybrid PPM (0.12) demonstrate a notable reduction in downtime risks.
-
RL-M achieves the lowest downtime probability (0.09), reinforcing its advantage in reducing unexpected failures.
-
-
Expected remaining useful life (ERUL):
-
BR has the shortest ERUL (9.8 cycles), meaning frequent system failures and replacements.
-
QIR improves lifespan (12.5 cycles), while PHM-CBM and Hybrid PPM extend it beyond 14 cycles.
-
RL-M maximizes system lifespan (15.8 cycles), proving its effectiveness in extending asset reliability.
-
Key takeaways from Table 2 indicate that traditional BR performs the worst across all metrics, making it unsuitable for modern, high-reliability applications. While QIR improves cost efficiency, it remains suboptimal compared to advanced strategies like PHM, RL-M, and Hybrid PPM. PHM-CBM and Hybrid PPM strike a balance between cost efficiency and robustness, making them strong candidates for industries that prioritize uptime. However, RL-M stands out as the best-performing strategy, achieving the lowest cost rate, the lowest downtime, and the highest system lifespan.
Sensitivity analysis of downtime cost (Cd) impact
Table 3 investigates how increasing downtime costs (Cd) from 10 to 50 affect the expected maintenance cost rate (C∞) across different strategies.
-
Impact on block replacement (BR):
-
C∞ increases significantly from 10.2 to 14.8, confirming BR is vulnerability to downtime penalties.
-
This highlights BR is inefficiency in environments where system availability is critical.
-
-
Impact on QIR and PHM-CBM:
-
C∞ for QIR rises from 8.7 to 11.0, demonstrating a moderate sensitivity to downtime penalties.
-
PHM-CBM sees a similar trend, increasing from 7.8 to 10.2, yet it still remains more cost-efficient than QIR.
-
PHM’s condition-based decision-making effectively mitigates high downtime costs.
-
-
Impact on RL-M:
-
RL-M maintains the lowest cost rate across all Cd values (6.5 to 8.5), proving its robustness against high downtime penalties.
-
The adaptive learning mechanism allows RL-M to optimize maintenance schedules dynamically, reducing unplanned downtime.
-
-
Impact on hybrid PPM:
-
Hybrid PPM performs consistently across different Cd values (7.2–9.3), making it a viable alternative for high-cost environments.
-
Unlike QIR, Hybrid PPM proactively schedules maintenance, preventing excessive cost increases.
-
The key insights derived from Table 3 indicate that high downtime penalties significantly affect the performance of the BR strategy, highlighting its inefficiency in modern industrial contexts. Although the QIR strategy remains a cost-effective alternative, it faces challenges in environments with elevated downtime costs (Cd). In contrast, the proportional hazards model for condition-based maintenance (PHM-CBM) and hybrid predictive–preventive maintenance (PPM) strategies demonstrate lower maintenance costs than QIR, underscoring their adaptability and effectiveness in environments characterized by dynamic degradation. Reinforcement learning-based maintenance (RL-M) emerges as the most robust strategy, effectively mitigating cost increases even in the presence of rising downtime penalties.
Strategy selection based on decision priorities
Table 4 summarizes the best maintenance strategy for different decision-making priorities:
-
Minimizing long-term costs:
-
RL-M is the optimal choice, achieving a low maintenance cost rate (7.4) through adaptive optimization.
-
-
Balancing cost and robustness:
-
PHM-CBM provides a balanced approach, reducing both maintenance costs and cost variability.
-
-
Reducing downtime probability:
-
RL-M ensures the lowest downtime probability (0.09), while PHM-CBM (0.14) offers an effective alternative.
-
Industries that prioritize system uptime should consider these strategies.
-
-
Minimizing cost variability:
-
Hybrid PPM maintains stable cost fluctuations, making it suitable for environments requiring predictable maintenance budgets.
-
-
Simple, low-cost implementation:
-
QIR is recommended for industries with limited data-driven capabilities, as it still outperforms BR while maintaining computational simplicity.
-
The key insights from Table 4 suggest that reinforcement learning-based maintenance (RL-M) is the optimal choice for both cost optimization and downtime reduction. The proportional hazards model for condition-based maintenance (PHM-CBM) strikes a balance between performance and robustness, while hybrid predictive–preventive maintenance (PPM) ensures consistent cost control, making it particularly suitable for budget-conscious industries. Meanwhile, the QIR strategy remains a practical option for industries that lack the capability to implement advanced AI-driven approaches.
This comprehensive evaluation corroborates the inefficiency of the BR strategy, which is characterized by high costs, substantial variability, and significant downtime. Although QIR improves cost performance, it struggles in environments with high downtime penalties. In contrast, PHM-CBM optimizes maintenance scheduling through real-time degradation data, thereby minimizing unexpected failures. RL-M delivers the most robust overall performance, exhibiting the lowest cost rate, minimal downtime probability, and the longest system lifespan. Hybrid PPM offers a balanced approach, combining preventive and predictive maintenance to maintain stable cost control across varying operational conditions. Consequently, industries seeking high reliability and cost efficiency should prioritize RL-M or PHM-CBM, while those with budget constraints may consider Hybrid PPM or QIR as more viable alternatives.
Maintenance strategies comparisons
This section presents a comparative analysis of the performance and resilience of two maintenance strategies (the BR and the QIR). The evaluation is conducted across various maintenance cost configurations and relative weight parameters, denoted as λ. By examining these strategies under diverse conditions, valuable insights can be gained regarding the suitability of each maintenance approach for specific operational objectives. Additionally, this analysis facilitates the identification of optimal configurations for the strategies, considering various combinations of maintenance costs and system characteristics. This is achieved by carefully analyzing the variations in key decision variables, such as inspection intervals and replacement thresholds. Ultimately, the findings provide a framework for selecting and optimizing maintenance strategies, ensuring that they align with particular maintenance goals and constraints, and guiding the attainment of both optimal performance and cost efficiency.
Sensitivity to the maintenance costs
In this sensitivity analysis, the CR cost is held constant at CC = 98, while the PR cost function, as specified in Eq. (17), is applied with C0 = 48. Two distinct scenarios are considered for evaluation:
-
Fluctuating inspection cost (Ci): The inspection cost (Ci) is varied from 1 to 45, with an increment of 1, while the system downtime cost rate (Cd) is fixed at 19. By examining the performance of the BR and QIR policies under different inspection costs, insights can be gained into the impact of inspection expenses on the selection and effectiveness of these maintenance strategies.
-
Fluctuating system downtime cost rate (Cd): The system downtime cost rate (Cd) is varied from 10 to 50, with an increment of 1, while the inspection cost (Ci) is fixed at 7. By investigating the performance of the BR and QIR policies under different system downtime cost rates, valuable insights can be obtained regarding the influence of downtime costs on the selection and effectiveness of maintenance strategies.
By analyzing the results and comparing the performance of the BR and QIR policies in these two scenarios, a better understanding can be gained regarding the robustness and adaptability of these strategies to variations in inspection costs and system downtime cost rates. This knowledge can inform decision-making in selecting the most suitable maintenance strategy based on specific cost considerations and system characteristics.
In both case studies, the selection of maintenance costs follows the constraint 0 < Ci < Cp(Xt) < Cc(Xt). This constraint ensures that the inspection cost (Ci) and preventive replacement cost (Cp) remain within certain limits relative to the criticality cost (Cc) of the system at time Xt. The relative weight parameter (λ) is set at 1.4, indicating a trade-off between preventive and corrective actions with a higher emphasis on preventive maintenance. The system characteristics are defined by the parameters: α = β = 0.1, L = 29, and Ms = 14. These parameters govern the failure rate, repair rate, inspection interval, and system lifetime, respectively, and contribute to the overall behavior and performance of the maintenance strategies being studied. By establishing these parameters and adhering to the maintenance cost constraint, a specific context is created to evaluate and compare the effectiveness of the maintenance strategies under consideration.
The advancement of the best choice factors and the related costs are shown in Fig. 2a and b of the first case study, respectively. Since no inspection procedures are necessary, it is noted that the optimal inspection intervals (Topt) for the BR (block replacement) policy stay constant. However, because the QIR (quality inspection and replacement) policy depends on inspections, its optimum decision variables closely follow changes in inspection cost (Ci). Furthermore, Fig. 2b illustrates how the cost of inspection (Ci) affects the ideal value of α (αopt) for the QIR policy, which ranges from high to low values. αopt is set higher to monitor the system’s degradation condition more frequently when inspections are cheap.

Varied inspection cost.
In order to maximize the system’s usable lifespan, the optimal PR threshold (Mopt) for the QIR policy is adjusted higher at the same time. On the other hand, rules adjust to lower values and less inspections are conducted when the cost of inspections rises. When Ci rises to extremely high levels, the inter-inspection intervals for the QIR policy can occasionally even be longer than Topt for the BR strategy. As a result, in order to reduce system downtime, the ideal PR thresholds (Mopt) for the QIR policy are set at low levels, allowing for system replacements at the first inspection date.
The QIR policy’s benefit is most noticeable when the inspection cost (Ci) is low; when Ci rises, however, the policy’s benefit decreases (Fig. 2a). This loss results from the QIR policy’s similarity to the BR policy in certain situations, but with higher expenses because of the extra inspection procedures. Additionally, Fig. 2a shows that, with regard to Ci, the standard deviations of the long-run projected maintenance cost rates (MCPRC) for both plans stay the same. This suggests that the robustness of the BR policy and the QIR policy are not greatly impacted by changes in inspection expenses. Nonetheless, the QIR policy’s MCPRC standard deviations are often higher than those of the BR policy, suggesting that the QIR policy’s decision structure is less reliable. However, the QIR strategy can result in higher maintenance cost savings, offering superior total cost performance.
The findings from the second case study, which are shown in Fig. 3, show interpretations that are comparable to those from the first case study. Interestingly, the configuration in the second case study at system downtime cost rate (Cd) = 19 is equal to the setup in the first case study at inspection cost (Ci) = 7. In order to reduce system downtime and mitigate high downtime costs, the optimal decision variables are adjusted in response to rising system downtime cost rates (Cd). The QIR policy’s optimal PR threshold (Mopt) has an uneven development, suggesting that it serves a supplemental function in adjusting the policies to their ideal configurations.

Varied system downtime cost rate.
Changes in system downtime cost rates (Cd) have a substantial effect on the resilience and performance of the QIR policy as well as the BR policy, as can be shown from an analysis of Fig. 3a. The long-run predicted maintenance cost rates for the QIR policy are almost the same as those for the BR strategy, although they are lower. For both policies, the MCPRC standard deviations are similar. As a result, when it comes to performance and robustness, the QIR policy outperforms the BR policy. Therefore, it is not unexpected that, as seen in the figure at the top of Fig. 3a, the QIR policy performs better than the others in terms of the objective cost function φ.
Sensitivity to the relative weight of the cost variability
When selecting a maintenance strategy, decision-makers’ financial prudence and risk tolerance are encapsulated in the parameter λ, which quantifies the relative weight assigned to cost variability. A comprehensive quantitative evaluation of the influence of λ on the resilience and efficacy of the maintenance strategies under consideration is critical. For this analysis, the system parameters are fixed at α = β = 0.1, L = 29, and Ms = 14, with maintenance budgets defined as C0 = 48, Ci = 5, Cd = 34, and Cc = 100. The study proceeds by examining the alterations in key performance metrics (φopt, C∞, and σ) and pivotal decision variables (Topt, αopt, Mopt) for the BR and QIR policies, as illustrated in Fig. 4a and b, respectively, with λ incrementally varied from 0 to 3 in steps of 0.1.

Varied relative weight of the cost variability.
As λ increases, decision-makers progressively prioritize the robustness of the maintenance strategies, which is evident from the reduction in the optimal inspection interval (Topt) for the BR strategy, as shown in Fig. 4b. In contrast, αopt for the QIR strategy remains predominantly unchanged. Additionally, the optimal PR threshold (Mopt) decreases as λ rises. Consequently, only the condition-based decision variable Mopt for the QIR policy is sensitive to changes in the relative weight of cost variability (λ) within the CBM framework. Thus, achieving the optimal balance between robustness and performance in CBM requires the careful adjustment of these decision variables.
Further analysis, as depicted in Fig. 4a, reveals that the standard deviations of the MCPRC (σ) and the long-term projected cost rates (C∞) for both strategies exhibit distinct patterns as λ is varied. This underscores the inherent trade-off between robustness and performance, highlighting the challenge of optimizing both simultaneously. However, when considering the objective function φopt, the QIR policy consistently outperforms the BR strategy. Thus, the QIR policy is identified as the more advantageous choice, offering a more favorable balance between robustness and maintenance performance.
In conclusion, the results demonstrate that as decision-makers increase λ to emphasize robustness, the optimal decision variables and cost metrics of the maintenance strategies appropriately adjust. A comparative analysis of the QIR and BR policies reveals that the QIR strategy consistently achieves superior performance, providing a more optimal balance between robustness and maintenance efficiency.
Conclusion and perspectives
This study evaluates two prominent maintenance policies: CBM and TBM, focusing particularly on the BR and QIR strategies. The findings emphasize the necessity of balancing maintenance performance and robustness, with CBM policies generally outperforming TBM approaches in terms of performance, albeit with a trade-off in robustness. Notably, the QIR policy stands out among CBM approaches, as it strikes a superior balance between performance and robustness compared to TBM.
Moreover, the study highlights the significant role of downtime costs in shaping the comprehensiveness of maintenance plans, illustrating how maintenance expenses can be influenced by such costs. Efficiently managing system downtime within CBM rules becomes paramount to maximizing robustness without sacrificing performance. The QIR policy, in particular, proves promising in this regard. By adjusting replacement thresholds and inspection intervals based on inspection costs, it enables decision-makers to optimize the balance between maintenance costs and system downtime. Through strategic manipulation of decision factors such as preventive replacement thresholds and inspection intervals, the QIR policy adeptly manages the trade-off between resilience and maintenance performance.
The comprehensive evaluation further reinforces the inefficiency of the BR strategy, which is plagued by high costs, substantial variability, and excessive downtime. While the QIR policy enhances cost performance, it still faces challenges in high-cost downtime environments. In contrast, the Proportional Hazards Model Condition-Based Maintenance (PHM-CBM) effectively schedules maintenance by leveraging real-time degradation data, thereby minimizing unexpected failures. Reinforcement Learning-Based Maintenance (RL-M) emerges as the top performer, achieving the lowest cost rate, minimal downtime probability, and the longest system lifespan. hybrid predictive–preventive maintenance (PPM) offers a balanced approach by combining preventive and predictive strategies, ensuring consistent cost control across varying operational conditions. Consequently, industries that require high reliability and cost efficiency should prioritize RL-M or PHM-CBM, while those facing budgetary constraints may benefit from Hybrid PPM or QIR.
While this article provides valuable insights, it currently lacks quantitative comparisons with traditional maintenance policies. To address this gap, future work will integrate additional models and empirical investigations, further enriching the case studies and providing a deeper comparative analysis between traditional and advanced maintenance strategies.
Overall, this study emphasizes the importance of achieving a harmonious balance between robustness and performance when designing maintenance plans. The QIR policy, in particular, holds promise in achieving this balance under CBM techniques due to its focus on aligning maintenance costs with system downtime. Advancements in this area could lead to the development of more resilient and efficient maintenance strategies for production systems experiencing stochastic degradation.
Future research should expand the analytical framework to incorporate stochastic degradation models that more accurately reflect real-world failure dynamics. Additionally, the integration of uncertainty quantification techniques will provide more refined assessments of the robustness of various maintenance strategies under different operational conditions. A promising avenue for future exploration is the combination of reinforcement learning with predictive models, creating adaptive maintenance policies. Furthermore, incorporating multi-objective optimization techniques will allow for a more nuanced evaluation of the trade-offs between cost, reliability, and downtime. Finally, practical validation of these theoretical findings through real-world industrial case studies will facilitate the successful implementation of advanced maintenance models in practice.
Data availability
The datasets generated during and/or analysed during the current study are available from the corresponding author on reasonable request.
References
Jin, H., Song, X. & Xia, H. Optimal maintenance strategy for large-scale production systems under maintenance time uncertainty. Reliab. Eng. Syst. Saf. 240, 109594. https://doi.org/10.1016/j.ress.2023.109594 (2023).
Zhang, C., Fang, Z. & Dong, W. Preventive maintenance strategy for multi-component systems in dynamic risk assessment. Reliab. Eng. Syst. Saf. 254, 110611. https://doi.org/10.1016/j.ress.2024.110611 (2024).
Finkelstein, M., Cha, J. H. & Bedford, T. Optimal preventive maintenance strategy for populations of systems that generate outputs. Reliab. Eng. Syst. Saf. 237, 109334. https://doi.org/10.1016/j.ress.2023.109334 (2023).
Zhang, Y. et al. Multi-objective maintenance strategy for complex systems considering the maintenance uncertain impact by adaptive multi-strategy particle swarm optimization. Reliab. Eng. Syst. Saf. 256, 110671. https://doi.org/10.1016/j.ress.2024.110671 (2024).
Shi, Y. et al. A new preventive maintenance strategy optimization model considering lifecycle safety. Reliab. Eng. Syst. Saf. 221, 108325. https://doi.org/10.1016/j.ress.2022.108325 (2022).
Fasuludeen Kunju, F. K. et al. Production and maintenance in industries: impact of industry 4.0. Ind. Robot Int. J. Robot. Res. Appl. 49(3), 461–475 (2022).
Schreiber, M. et al. Integrated production and maintenance planning in cyber-physical production systems. Procedia CIRP 79, 534–539 (2019).
Tian, Z. & Liao, H. Condition based maintenance optimization for multi-component systems using proportional hazards model. Reliab. Eng. Syst. Saf. 96(5), 581–589 (2011).
Xiao, T. et al. Multi-agent reinforcement learning-based trading decision-making in platooning-assisted vehicular networks. IEEE/ACM Trans. Network. 32(3), 2143–2158 (2023).
Vijean, V., Ahmad, R., Ahmad, W. A. A. W., et al. Predictive maintenance system design for infant intensive phototherapy lamp. In 2022 4th International Conference on Artificial Intelligence and Speech Technology (AIST), 1–6 (IEEE, 2022).
Zhu, Y., Xia, T., Chen, Z., Pan, E. & Xi, L. Optimal maintenance service strategy for OEM entering competitive MRO market under opposite patterns. Reliab. Eng. Syst. Saf. 217, 108060. https://doi.org/10.1016/J.RESS.2021.108060 (2022).
Badihi, H. et al. A comprehensive review on signal-based and model-based condition monitoring of wind turbines: Fault diagnosis and lifetime prognosis. Proc. IEEE 110(6), 754–806 (2022).
Zhang, C., Chen, R., Wang, S., Dui, H. & Zhang, Y. Resilience efficiency importance measure for the selection of a component maintenance strategy to improve system performance recovery. Reliab. Eng. Syst. Saf. 217, 108070. https://doi.org/10.1016/j.ress.2021.108070 (2022).
Asmussen, S. Applied Probability and Queues (Wiley, 1987).
Abdel-Hameed, M. Lévy Processes and Their Applications in Reliability and Storage (Springer, 2014).
Dekker, R. & Scarf, P. A. On the impact of optimisation models in maintenance decision making: The state of the art. Reliab. Eng. Syst. Saf. 60(2), 111–119 (1998).
Cheikh, K. et al. A Monte Carlo method to decision-making in maintenance strategies. J. Nondestr. Eval. Diagn. Progn. Eng. Syst. 8, 1–26. https://doi.org/10.1115/1.4066194 (2024).
Cheikh, K. & Boudi, E. M. Influence of the relative weight of the performance and robustness of condition-based maintenance strategies and time-based maintenance strategies. J. Harbin Eng. Univ. 45(1), 93–98 (2024).
Cheikh, K. et al. Development and optimization of maintenance using the Monte Carlo method. Int. J. Ind. Eng. Prod. Res. 35(3), 1–19 (2024).
Cheikh, K. et al. Evaluating economic performance and robustness of maintenance strategies for degrading systems. J. Eur. Syst. Autom. 57, 991–1003. https://doi.org/10.18280/jesa.570407 (2024).
Shi, G. et al. A chance-constrained net revenue model for online dynamic predictive maintenance decision-making. Reliab. Eng. Syst. Saf. 249, 110233 (2024).
Werbińska-Wojciechowska, S. Delay-time-based maintenance modeling for technical systems—Theory and practice. Adv. Syst. Reliab. Eng. https://doi.org/10.1016/B978-0-12-815906-4.00001-4 (2019).
Tsai, Y.-T., Wang, K.-S. & Tsai, L.-C. A study of availability-centered preventive maintenance for multi-component systems. Reliab. Eng. Syst. Saf. 84(3), 261–270 (2004).
Fatkhurrokhman, A., Subekti, S. & Indah, N. A comparison of Hilbert and fast Fourier transform techniques for reciprocating motors. JTTM J. Terapan Tek. Mesin 5(1), 62–66 (2024).
Wu, J., Qian, C. & Dohi, T. Optimal opportunity-based age replacement policies in discrete time. Reliab. Eng. Syst. Saf. 241, 109587 (2024).
Acknowledgements
This work was supported by the Department of Mechanical Engineering, Energetic team, Mechanical and Industrial Systems (EMISys), Mohammadia School of Engineers, Mohammed V University, Rabat, Morocco
Author information
Authors and Affiliations
Contributions
Khamiss Cheikh: conceptualization, methodology, data curation, formal analysis, writing, original draft. El Mostapha Boudi: methodology, investigation, data analysis, writing, review, and editing. Rabi Rabi: supervision, project administration, funding acquisition, writing, review, and editing. Hamza Mokhliss: visualization, software, validation, writing, review, and editing.
Corresponding author
Ethics declarations
Competing interests
The authors declare no competing interests.
Additional information
Publisher’s note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
Open Access This article is licensed under a Creative Commons Attribution-NonCommercial-NoDerivatives 4.0 International License, which permits any non-commercial use, sharing, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons licence, and indicate if you modified the licensed material. You do not have permission under this licence to share adapted material derived from this article or parts of it. The images or other third party material in this article are included in the article’s Creative Commons licence, unless indicated otherwise in a credit line to the material. If material is not included in the article’s Creative Commons licence and your intended use is not permitted by statutory regulation or exceeds the permitted use, you will need to obtain permission directly from the copyright holder. To view a copy of this licence, visit http://creativecommons.org/licenses/by-nc-nd/4.0/.
About this article

Cite this article
Cheikh, K., Boudi, E., Rabi, R. et al. Monte Carlo simulation for evaluating and optimizing the efficiency of BR and QIR maintenance strategies. Sci Rep 15, 32783 (2025). https://doi.org/10.1038/s41598-025-17580-3
Received:
Accepted:
Published:
Version of record:
DOI: https://doi.org/10.1038/s41598-025-17580-3
Keywords
This article is cited by
-
Environment-aware adaptive maintenance strategies for stochastic degradation systems using Markovian modeling and Monte Carlo analysis
The International Journal of Advanced Manufacturing Technology (2026)
