
Abstract
Forecasting rapid, non-linear change or so-called tipping points is a major concern in ecology and environmental science. Statistical early warning signs, based on the theory of stochastic dynamical systems, are now regularly applied to observational data streams. However, the reliability of these early warning signs relies on a number of key mathematical assumptions, most notably the presence of Gaussian noise, while many ecological systems exhibit non-Gaussianity. We here show that for systems driven by non-Gaussian, \(\alpha\)-stable noise, the classical early warning signs of rising variance and autocorrelation are not supported by mathematical theory, and their use poses the danger of spurious, false-positive results. To address this, we provide a generalized approach by introducing the scaling factor \(\gamma _X\) as an alternative early warning sign. We show that in the case of the linear Ornstein-Uhlenbeck process, there exists a direct inverse relationship between \(\gamma _{X}\) and the bifurcation parameter, telling us that \(\gamma _{X}\) will increase as we approach the bifurcation. Our numerical simulations confirm theoretical results and show that our findings generalize well to non-linear, non-equilibrium systems often employed in ecological systems. We thus provide a generalized, robust, and broadly applicable statistical early warning sign for systems driven by Gaussian and non-Gaussian \(\alpha\)-stable noise.
Similar content being viewed by others
Introduction
Non-linear dynamical systems may exhibit rapid and irreversible state shifts upon a small change of a parameter1,2. The existence of such critical transitions or tipping points is a major concern in the context of global climate change3,4,5 and has been postulated for a number of ecological contexts including forests6,7, grasslands8,9 and marine ecosystems10,11.
In the case of stochastic systems, statistical early warning signs may precede the actual tipping point, for example, a rise in variance or autocorrelation12,13. A range of real-world systems exhibit such signs before critical transitions14,15,16,17. An increase in variance and other observables has also been observed in time series data of ecosystems and climate elements suggested to approach tipping points18,19,20 and consequently postulated for biosphere monitoring21.
The use of variance or autocorrelation as early warning signs sits on a robust body of mathematical theory concerned with bifurcations in stochastic dynamical systems1,2,22. However, one key assumption of this theory is that we are working in the small noise limit of Gaussian white noise, an assumption that may not always hold in real-world applications23. Previous studies have already pointed out situations where classical early warning signs fail for other noise types24,25,26.
There is ample evidence that the assumption of Gaussian white (that is uncorrelated) noise does not hold for many environmental variables which have been shown to be correlated in time27,28,29,30 or exhibit heavy tails, thus violating the Gaussian assumption28,31. Since climate change is expected to lead to a higher frequency of extreme events32,33, the occurrence of heavy-tailed data might additionally become more frequent in the future.
One class of probability distributions that are characterized by such heavy tails are \(\alpha\)-stable distributions28,34,35. The exception to this rule is the Gaussian (Normal) distribution which is a special case. Other known members of the class include the Cauchy (Lorenz) distribution or the Lévy distribution. A range of real-world systems have been found to display \(\alpha\)-stable properties36,37,38,39. Notable examples in ecology include the foraging behavior of various animal populations40,41,42,43, tree ring44 or the distribution of rainfall, temperature, and other climatological variables,31,45,46.
One important characteristic of non-Gaussian \(\alpha\)-stable distributions is that their variance and higher order moments diverge35. This has spawned much discussion about the applicability of \(\alpha\)-stable models to real data, as empirical moments will of course always be finite31,46. However, as31 among others have pointed out, divergence simply means that we cannot expect moments to converge to a finite value but must rather assume them to continue increasing with sample size. This of course heavily challenges the use of a rising variance as an early warning sign of a tipping point. While the use of \(\alpha\)-stable noise in modeling tipping points is gaining traction47,48,49,50,51,52, the impact of \(\alpha\)-stable driving noise on the existence and properties of early warning sign in such systems has not yet been assessed.
In this paper, we want to discuss the applicability and limits of classical early warning signs in the \(\alpha\)-stable case, as well as the implications for ecological research. In “Theoretical background” section, we revise the basic theory of stochastic dynamical systems, \(\alpha\)-stable processes, and early warning signs and discuss potential pitfalls when applying classical early warning signs to systems driven by \(\alpha\)-stable noise. In “An early warning indicator for non-Gaussianα-stable systems” section, we introduce an alternative early warning sign - the scaling factor \(\gamma\) - showing that it is a natural generalization of the Gaussian variance scaling to the \(\alpha\)-stable case. Lastly, in “Numerical simulations” section, we demonstrate the applicability of our generalized approach for simple numerical models: a linear system of Ornstein-Uhlenbeck type and a non-linear system passing through a fold bifurcation, as found in many ecological models. We conclude by discussing the implications of our results for more ecological studies of tipping points.
Theoretical background
Stochastic dynamical systems
The application of stochastic dynamical systems has a long history in ecological and environmental science53,54. The study of tipping points, in particular, also references seminal works by29 and others that separated the slow dynamics of climate from the fast fluctuations of weather, represented by noise. In all these cases, observations are produced by the interaction of the dynamical system with the driving noise. We can formulate this view as a one-dimensional stochastic differential model
where \(dX(t) = -U'\big (X (t), k \big )\, dt\) describes a deterministic dynamical system evolving in a potential U, dN stands for external noise, X(t) is a realization of the system at time t, and k is a bifurcation parameter.
The potential \(U=U(X,k)\) can be chosen to represent any dynamical model suitable for the research task at hand. In this paper, we will consider two models: The (linear) Ornstein–Uhlenbeck with
as well as a non-linear, quadratic system with
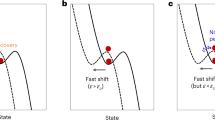
In the linear case, the deterministic dynamical system has one fixed point at \(X^* = 0\). It passes through a bifurcation at \(k = 0\), where \(X^*\) is stable for \(k > 0\) and unstable for \(k < 0\) (see orange lines in Fig. 1a for a bifurcation diagram).
The linear stochastic system
gives rise to the so-called Ornstein–Uhlenbeck type process that originally described the movement of a particle subject to the random influence of the surrounding fluid and viscous friction55. Due to this, it is common to refer to the dynamical part as the drift term and the stochastic part as the diffusion term. The Ornstein-Uhlenbeck process is the most basic stochastic dynamical system and can be recovered from non-linear systems when linearizing around fixed points (as demonstrated in (15)).
The nonlinear system with the potential (3) has a fold bifurcation, also at \(k=0\). It has two fixed points \(X^*_{\pm } = \pm \sqrt{k}\) for \(k > 0\) that coincide for \(k=0\), and none for \(k < 0\). (see orange lines in Fig. 1b for a bifurcation diagram).
The second important modeling choice to make is that of the random noise perturbation. Usually, the noise is assumed to be produced by a Brownian motion, which is a process with independent and stationary increments following a Normal (Gaussian) distribution (As we will discuss in the next chapter in more detail, this is an \(\alpha\)-stable process with \(\alpha\) = 2). Figure 1 gives example trajectories of such systems in black.
It is evident that the choice of noise dN is decisive for all the stochastic properties of the process X. In this paper, we want to go beyond the Gaussian paradigm and focus on the case of noise dN that is produced by a symmetric \(\alpha\)-stable process \(N^{(\alpha )}\), that has stationary, independent increments, but whose increments \(N^{(\alpha )}(t) - N^{(\alpha )}(s)\) follow a symmetric \(\alpha\)-stable (Lévy) distribution. The wide class of \(\alpha\)-stable distributions appears naturally in the framework of a generalized Central Limit Theorem as a scaled limit of sums of independent random variables with infinite second moments. It includes the Gaussian as well as a range of heavy-tailed distributions.
In modeling, \(\alpha\)-stable distributions appear naturally as a “second best” choice noise that allows describing large (catastrophic) jumps or heavy tails that are not possible in “Gaussian” systems. Notable examples of non-Gaussian ecological models include the foraging behavior of animals40,41,42,43 or forest disturbances49.
\(\alpha\)-stable noise
The goal of this section is to briefly revise the most important properties of symmetric centered \(\alpha\)-stable processes needed for our results (\(\alpha\)-stable processes are a subclass of Lévy processes56,57. For this reason, the name Lévy stable process is also sometimes used34,58. Lévy flights describe random walks following an \(\alpha\)-stable random variable34,39.) We will follow the notation of Section 1 in35 and say that a random variable Z has a symmetric \(\alpha\)-stable distribution, \(Z^{(\alpha )}\sim \textbf{S}(\alpha , \beta , \gamma , \delta )\) described by four parameters:
-
a characteristic exponent \(\alpha \in (0,2]\), describing the tail behavior of Z;
-
a scale parameter \(\gamma \ge 0\);
-
a skewness parameter \(\beta \in [-1,~1]\), with \(\beta = 0\) in the symmetric case;
-
a location parameter \(\delta \in \mathbb {R}\), with \(\delta = 0\) in the centered case.
For the purpose of this study, we will focus on the symmetric centered \(\alpha\)-stable processes \(\textbf{S}\alpha \textbf{S}(\gamma )\), where \(\beta , \delta\) = 0. Its characteristic function is
Despite the very simple form of the characteristic function (5), the probability density functions of \(\alpha\)-stable random variables are, in general, not available. There are two notable exceptions to this:
For \(\alpha =2\), the random variable \(Z^{(\alpha )}\) is Gaussian with the probability density function
In this case,
For \(\alpha =1\), the random variable \(Z^{(\alpha )} \sim \textbf{S}\alpha \textbf{S}(\gamma )\) has the Cauchy (Lorenz) distribution with the density
It is instructive to note that for \(\alpha =1\), neither the variance nor the mean value of \(Z^{(1)}\) exist.
In general, for \(\alpha \in (0,2)\) and \(\gamma >0\) for the random variable \(Z^{(\alpha )}\) we have:
In the context of statistical early warning signs, it is important to note that the second moment and variance are not defined for all \(\alpha \in (0,2)\), and the first moment (mean) is not defined for all \(\alpha \in (0,1]\). On the other hand, all moments exist in the Gaussian case \(\alpha =2\).
With the definition of a \(\textbf{S}\alpha \textbf{S}(\gamma )\) random variable in hand, we can construct a process \(N^{(\alpha )}\) starting at zero such that its increments
are independent for any choice of \(n\ge 1\) and \(0\le t_1\le \cdots \le t_n\) (the white noise property) and
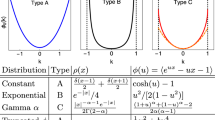
In other words, for \(\alpha =2\), the process \(N^{(2)}\) is a Brownian motion that has exponentially light tails and continuous trajectories56. For \(\alpha \in (0,2)\), the process \(N^{(\alpha )}\) has heavy tails and discountinous trajectories. Figure 1b illustrates the effect of \(\alpha\) on trajectories of \(N^{(\alpha )}\). Figure 2a illustrates the effect of the characteristic exponent \(\alpha\) on the shape of the distribution of the random variable \(Z^{(\alpha )}\).

Bifurcation diagrams (orange lines) and example trajectories of the Ornstein-Uhlenbeck process (2) (a) and the fold bifurcation (3) (b). Stable fixed points are indicated by solid, unstable ones by dashed lines. Example trajectories for different values of \(\alpha _N\) are obtained by slowly varying k in the direction of the bifurcation at \(k = 0\) while following the stable fixed point. All noise sequences are generated with the same random seed to ensure extreme values occur simultaneously.
Early warning signs
To construct early warning signs, we are interested in the statistical properties of the stochastic process X in relation to the bifurcation parameter k and the noise \(N^{(\alpha )}\). We would like to reiterate that changes in these properties when approaching a bifurcation are created through the interaction of the driving noise \(N^{(\alpha )}\) with the dynamical system. The driving perturbation itself is assumed to remain constant.
A range of statistical properties of X has been utilized as early warning signs. The most important one, which we will focus on for the remainder of this work, is variance \(\operatorname {Var} X(t)\). However, autocorrelation \(\zeta\)1,5,13, skewness59 or other properties60,61 have also been proposed.
The theory of early warning signs sits on a robust body of mathematical theory derived from the properties of the Ornstein-Uhlenbeck process (4): For this particular system, we can obtain an explicit solution (following22)
Recall that in the classical case \(\alpha =2\), we assume \(N^{(2)}\) to be a Brownian motion with increments \(N(t) - N(s) \sim \mathcal {N}(0, 2\gamma _N^2(t-s))\). Assuming for definiteness that \(X_0=0\), we obtain that X(t) will be normally distributed with mean \(\mu = 0\) as well. We can obtain the full probability density p(X, t) from(12) directly or via the Fokker-Planck equation
to obtain the variance
Hence we find that in the stationary regime (\(t\rightarrow \infty\)), the limit variance scales with \(\frac{1}{2k}\) and hence increases as the system approaches the stable-to-unstable transition (\(k~\rightarrow ~0^+\)), as shown in Fig. 2b.
In non-linear systems, one would typically linearize around the steady state of interest to again obtain a linear system of the form of (4)19,23. In the case of the fold bifurcation (3) we expand the right-hand side of \(f(X)=k-X^2\) around \(X^*_+=\sqrt{k}\):
Rearranging the terms and denoting \(Y = X - X^{*}_+\) and \(\kappa = 2\sqrt{k}\) we obtain an approximation of X in the vicinity of \(X^*_+\) as a new Ornstein–Uhlenbeck process
Hence we can expect the system to still follow relationship (14) when close to \(X^*_+\).

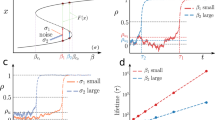
(a) The classical early warning sign: Relationship between bifurcation parameter k and \(\operatorname {Var} X\) in the Gaussian case for the Ornstein-Uhlenbeck process (4) (blue) and the fold bifurcation (3) (yellow). Dashed line gives theoretical result (14). (b) Probability density functions of \(\alpha\)-stable random variables for different values of \(\alpha\) (\(\beta = 0\), \(\gamma = 1\), \(\delta = 0\)).
In the case of non-Gaussian \(\alpha\)-stable noise, \(N^{(\alpha )}\) will not possess a finite variance, as stated in Section 2.2.58 show that for systems of type (1) with \(\alpha\)-stable driving noise \(N^{(\alpha )}\) and U(X) of order \(|x|^c\), \(|x|\rightarrow \infty\), Var[X(t)] will only be finite if \(c > 4 - \alpha\). Only then is the potential function steep enough to sufficiently confine the noise. In the case of an Ornstein–Uhlenbeck process we have \(c=2\) and therefore \(c > 4 - \alpha\) does not hold for \(\alpha \in (0,2)\).
The same is true for the fold bifurcation system with \(c=3\) and \(\alpha \in (0,1]\). In the case of more complex systems such as a quartic double-well potential (\(c=4\)), the global variance exists. Nevertheless, when we apply linearization as in equation (15), the local existence of variance gets lost.
This implies that the classical theory of early warning signs relying on linearization, as laid out in this section is not valid for systems driven by non-Gaussian \(\alpha\)-stable noise. On the contrary, as we cannot ensure the variance to converge to a finite value, there is always the danger of misinterpreting resulting spurious increases as an early warning sign (see left panel of Fig. 3 for an illustration).
Therefore, where systems driven by non-Gaussian \(\alpha\)-stable noise might occur, we are in need of a different indicator that is robust again violating the Gaussian assumption.

Illustration of non-converging variance. In the Gaussian case (\(\alpha\) = 2), the variance converges to a final value once the simulation has reached equilibrium due to the central limit theorem (black trajectories in the left panel). In the non-Gaussian, \(\alpha\)-stable case, the variance of X does not converge to a finite value and may thus exhibit a spurious increase even for constant k, giving rise to a false-positive early warning sign (blue trajectories in the left panel). In contrast, \(\gamma _X\) converges for all \(\alpha\) (right panel). Thin lines are individually simulated trajectories, bold lines average over all 100 trajectories, k = 1. Note the log scale on the y-axis. Simulation setup mirrors Fig. 5, \(\gamma _X\) is estimated every 300 simulation steps.
An early warning indicator for non-Gaussian \(\alpha\)-stable systems
To address this caveat, we propose the scaling parameter \(\gamma _X\) as an alternative, robust early warning sign that is applicable to Gaussian and \(\alpha\)-stable systems, easy to calculate in practical applications, and, as we will show in the following, firmly grounded in mathematical theory.
We start with the \(\alpha\)-stable process of Ornstein-Uhlenbeck type
where \(N^{(\alpha )}(t)\) is a symmetric, \(\alpha\)-stable process with characteristic function
Recall the solution of the Ornstein-Uhlenbeck process (12). Assuming for simplicity that \(X_0=0\), we obtain (see Appendix for a full derivation) that X(t) is also \(\alpha\)-stable with the characteristic function
with the scale parameter
In the stationary regime \(t\rightarrow \infty\) we obtain the limit value of the scale parameter
This formula gives us a direct relationship between the limit scale \(\gamma _{X}\) and the bifurcation parameter k, which tells us that \(\gamma _{X}\) will increase as we approach the bifurcation (decreasing k). Based on this relationship, we are able to utilize \(\gamma _X\) as an early warning sign of that bifurcation.
This is indeed a generalization of the variance scaling found in the Gaussian case. Recalling the relation (7) for Gaussian \(\alpha\)-stable variables and taking into account (14) we get
recovering (21) for \(\alpha =2\).
Numerical simulations
We perform a range of numerical simulations to confirm our results and to illustrate the applicability of our proposed indicator \(\gamma _{X}\). As (21) gives the solution in the long-term limit, we first perform equilibrium simulations for both systems (2) and (3) over a range of values for k. In a second step, we then estimate \(\gamma _{X}\) from a single trajectory while slowly moving k towards the bifurcation, as one would in actual applications (non-equilibrium simulations). We perform all simulations for \(\alpha\) = {2, 1.8, 1.5, 1.3}. We focus on this range, as it is what typically occurs in real and simulated applications.
To discretize and simulate the sample paths of X, the Euler-Maruyama scheme45,62,63
is often used. It is well known that for superlinear drifts \(-U'\), this scheme is not stable and often results in diverging trajectories, see, e.g.64. In practice, such samples are often neglected, which leads to biased numerical results.
For our simulations, we thus use the tamed Euler–Maruyama method:
For \(\epsilon \ll \Delta t\) small enough, the modified drift appearing in Eq. (24) is very close to \(-U'\), but remains bounded as t approaches infinity. This makes the numeric scheme stable with respect to the large jumps of the noise \(N^{(\alpha )}\)64,65,66.
We assume that \({N_j}\) are i.i.d. \(\alpha\)-stable random variables with the characteristic function
They are obtained with the help of the Python function
For our simulations, we choose \(\gamma _{N} = 0.1\) and \(\Delta {t} = 0.004\), and initiated all simulations at \(X_0 = 0.5\), to be in the vicinity but not at the stable state. Since we have more than one fixed point in the non-linear case, trajectories might escape the basin of attraction of the stable fixed point. We therefore stop a simulation if
For the equilibrium runs we perform 100 independent estimations of \(\gamma _{X}\) for each combination of \(\alpha\) and k. As our goal here is to confirm our theoretical findings, we use 5 independent trajectories for each estimation to improve accuracy at reasonable computational costs (see Fig. 6). All parameters used in the simulations are also given in Table 1. Note that these are optimized for the range of \(\alpha\) simulated and would need to be adapted to other cases accordingly. To reduce the influence of stochasticity on our estimations, we use the same noise sequence across the range of k within each estimation and the same random seed to generate noise sequences for different \(\alpha\) (see Fig. 1 for an illustration of the latter).
For the non-equilibrium runs, we simulate 15 trajectories for each value of \(\alpha\). After reaching equilibrium, we vary k from 5 to 0 in steps of 0.0001. We estimate \(\gamma _X\) every 150 time steps, using 300 data points.
Equilibrium simulations
Our simulations of the Ornstein-Uhlenbeck process confirm the theoretical relationship between k and \(\gamma _X\) (Fig. 4). Accuracy is highest for large values of k; the smaller k, the higher the variability between independent estimations. However, the mean across simulations corresponds to theoretical values for all k and \(\alpha\), only deviating slightly very close to the bifurcation.
In the non-linear case, we see similar patterns of increasing variability for lower values of k and \(\alpha\). Mean values align with theory for medium values of k but not very far or very close to the bifurcation. This is expected as the linearization (15) neglects higher-order terms, which become more important as we approach the bifurcation point. Nevertheless, we observe a strong increase in \(\gamma _X\) up until \(k = 0.1\), confirming the theoretical suitability of \(\gamma _X\) as an early warning sign across all simulated \(\alpha\) for a wide range of k.

Equilibrium simulations: Estimation of \(\gamma _{X}\) as a function of k for the (linear) Ornstein-Uhlenbeck process (4) (blue) and non-linear fold (3) (yellow) on a log-log scale. Small dots represent 100 individual estimations, large dots represent the mean value across the whole sample. Orange lines give the theoretical result (21).
As expected, estimating \(\gamma _X\) from trajectories produces more noisy results, with individual trajectories exhibiting large jumps in \(\gamma _X\), especially for smaller \(\alpha\) due to large jumps of the underlying process.
Non-equilibrium simulations
The mean across trajectories fits the theoretical value well at the start of the simulation but begins to deviate more and more as the simulation progresses. This is consistent with theory as we are leaving the equilibrium case and the system takes longer to reach equilibrium again as we move towards a bifurcation. However, \(\gamma _X\) continues to increase. An exception is the linear case for \(\alpha\) values of 1.3 and 1.5, where we see a stagnation or even decline of the mean trajectory very close to the bifurcation (\(k < 1\)). Importantly in the non-linear case, this is not the case and we observe a steady increase in \(\gamma _X\) for the whole range of k and all \(\alpha\) in both the mean and the majority of individual trajectories. This confirms the practical suitability of \(\gamma _X\) as an early warning sign of an approaching bifurcation in more application-oriented situations.

Non-equilibrium simulations: Estimation of \(\gamma _{X}\) on transient trajectories produced by the linear and non-linear systems. Thin lines represent 15 individual estimations, thick lines represent the mean value across the whole sample. All trajectories are additionally smoothed using a moving window of 100 points. Dashed lines give theoretical results. k is moved in the direction of the arrow.
Conclusion and implications for practical applications
We have shown that for systems driven by \(\alpha\)-stable, non-Gaussian noise, the classical early warning sign of rising variance is not supported by mathematical theory, and its use poses the danger of spurious, false-positive results.
To address this, we have considered the scale factor \(\gamma _X\) as an alternative generalized early warning sign applicable to Gaussian and non-Gaussian \(\alpha\)-stable processes. We have laid out the necessary mathematical theory to show that \(\gamma _X\) is always defined and inversely scales with the bifurcation parameter, much like the variance does in the Gaussian case.
Our simulations confirm our theoretical results and show that \(\gamma _X\) can be estimated from few trajectories with sufficient accuracy. Additionally, our results generalize well to the non-linear, non-equilibrium case we would usually find in applications.
Our results highlight that researchers applying tipping point theory to ecological applications need to be sure that the relevant assumptions hold in their case. While the driving noise of a real ecological system might not be known — or debatably even exist — non-Gaussianty of the observable X(t) alone should caution against using metrics designed for Gaussian systems. For cases where X(t) can be described as an \(\alpha\)-stable random variable, we hope to have provided an alternative metric useful for practitioners.
Estimating the parameters of an \(\alpha\)-stable distribution is a common exercise, and algorithms are readily available in relevant programming languages. While computationally more expensive than variance estimation, it still provides an easy-to-use method that works with limited data points. This provides good conditions for applying \(\gamma _X\) to more complex and real-world data streams in the future.
The utilization of statistical early warning signs has become widespread, extending beyond theoretical models to practical, policy-relevant examinations of tipping points within the climate system and their repercussions on the biosphere. Ensuring the solidity and robustness of the theoretical underpinnings supporting these applications is paramount. We thus hope our results will contribute to advancing the reliability and accuracy of early warning signs in ecological and environmental research.
Data availability
Code and data to reproduce all figures can be found at https://github.com/lucialayr/stableEWS_paper
References
Kuehn, C. A mathematical framework for critical transitions: Bifurcations, fast-slow systems and stochastic dynamics. Phys. D Nonlinear Phenomena 240(12), 1020–1035. https://doi.org/10.1016/j.physd.2011.02.012 (2011).
Strogatz, S. H. Nonlinear Dynamics and Chaos: with Applications to Physics, Biology, Chemistry, and Engineering, 2nd ed. oCLC: ocn842877119 (Westview Press, a member of the Perseus Books Group, 2015).
Drijfhout, S. et al. Catalogue of abrupt shifts in Intergovernmental Panel on Climate Change climate models. Proc. Natl. Acad. Sci., 112(43). https://doi.org/10.1073/pnas.1511451112, (2015).
Lenton, T. M. et al. Tipping elements in the Earth’s climate system. Proc. Natl. Acad. Sci. 105(6), 1786–1793. https://doi.org/10.1073/pnas.0705414105 (2008).
Scheffer, M. et al. Catastrophic shifts in ecosystems. Nature 413(6856), 591–596. https://doi.org/10.1038/35098000 (2001).
Chapin, F. S. et al. Role of land-surface changes in arctic summer warming. Science 310(5748), 657–660. https://doi.org/10.1126/science.1117368 (2005).
Hirota, M. et al. Global resilience of tropical forest and savanna to critical transitions. Science 334(6053), 232–235. https://doi.org/10.1126/science.1210657 (2011).
Foley, J. A. Tipping points in the Tundra. Science 310(5748), 627–628. https://doi.org/10.1126/science.1120104 (2005).
Rietkerk, M. & van de Koppel, J. Alternate stable states and threshold effects in semi-arid grazing systems. Oikos 79(1), 69. https://doi.org/10.2307/3546091 (1997).
Boulton, C. A. & Lenton, T. M. Slowing down of North Pacific climate variability and its implications for abrupt ecosystem change. Proc. Natl. Acad. Sci. 112(37), 11496–11501. https://doi.org/10.1073/pnas.1501781112 (2015).
Selkoe, K. A. et al. Principles for managing marine ecosystems prone to tipping points. Ecosyst. Health Sustain. 1(5), 1–18. https://doi.org/10.1890/EHS14-0024.1 (2015).
Scheffer, M. et al. Early-warning signals for critical transitions. Nature 461(7260), 53–59. https://doi.org/10.1038/nature08227 (2009).
Wiesenfeld, K. Noisy precursors of nonlinear instabilities. J. Stat. Phys. 38(5–6), 1071–1097. https://doi.org/10.1007/BF01010430 (1985).
Carpenter, S. R. et al. Early warnings of regime shifts: a whole-ecosystem experiment. Science 332(6033), 1079–1082. https://doi.org/10.1126/science.1203672 (2011).
Dai, L. et al. Generic indicators for loss of resilience before a tipping point leading to population collapse. Science 336(6085), 1175–1177. https://doi.org/10.1126/science.1219805 (2012).
Dai, L., Korolev, K. S. & Gore, J. Slower recovery in space before collapse of connected populations. Nature 496(7445), 355–358. https://doi.org/10.1038/nature12071 (2013).
Dakos, V. et al. Slowing down as an early warning signal for abrupt climate change. Proc. Natl. Acad. Sci. 105(38), 14308–14312. https://doi.org/10.1073/pnas.0802430105 (2008).
Boers, N. Observation-based early-warning signals for a collapse of the Atlantic Meridional Overturning Circulation. Nat. Clim. Change 11(8), 680–688. https://doi.org/10.1038/s41558-021-01097-4 (2021).
Boers, N. & Rypdal, M. Critical slowing down suggests that the western Greenland Ice Sheet is close to a tipping point. Proc. Natl. Acad. Sci. 118(21), e2024192118. https://doi.org/10.1073/pnas.2024192118 (2021).
Boulton, C. A., Lenton, T. M. & Boers, N. Pronounced loss of Amazon rainforest resilience since the early 2000s. Nat. Clim. Change 12(3), 271–278. https://doi.org/10.1038/s41558-022-01287-8 (2022).
Lenton, T. M. et al. A resilience sensing system for the biosphere. Philos. Trans. R. Soc. B Biol. Sci. 377(1857), 20210383. https://doi.org/10.1098/rstb.2021.0383 (2022).
Gardiner, C. W. Stochastic Methods: A Handbook for the Natural and Social Sciences, Springer Series in Synergetics 4th edn. (Springer, 2009).
Boettiger, C. & Hastings, A. Quantifying limits to detection of early warning for critical transitions. J. R. Soc. Interface 9(75), 2527–2539. https://doi.org/10.1098/rsif.2012.0125 (2012).
Boettner, C. & Boers, N. Critical slowing down in dynamical systems driven by nonstationary correlated noise. Phys. Rev. Res. 4(1), 013230. https://doi.org/10.1103/PhysRevResearch.4.013230 (2022).
Dutta, P. S., Sharma, Y. & Abbott, K. C. Robustness of early warning signals for catastrophic and non-catastrophic transitions. Oikos 127(9), 1251–1263. https://doi.org/10.1111/oik.05172 (2018).
Kuehn, C., Lux, K. & Neamţu, A. Warning signs for non-Markovian bifurcations: colour blindness and scaling laws. Proc. R. Soc. A Math. Phys. Eng. Sci. 478(2259), 20210740. https://doi.org/10.1098/rspa.2021.0740 (2022).
Ellerhoff, B. & Rehfeld, K. Probing the timescale dependency of local and global variations in surface air temperature from climate simulations and reconstructions of the last millennia. Phys. Rev. E 104(6), 064136. https://doi.org/10.1103/PhysRevE.104.064136 (2021).
Franzke, C. L. E., Barbosa, S., Blender, R. et al. The structure of climate variability across scales. Rev. Geophys. 58(2). https://doi.org/10.1029/2019RG000657, (2020).
Hasselmann, K. Stochastic climate models: Part I. Theory. Tellus A Dyn. Meteorol. Oceanogr. 28(6), 473. https://doi.org/10.3402/tellusa.v28i6.11316 (1976).
Royston, S. et al. Sea-level trend uncertainty with pacific climatic variability and temporally-correlated noise. J. Geophys. Res. Oceans 123(3), 1978–1993. https://doi.org/10.1002/2017JC013655 (2018).
Lovejoy, S. & Schertzer, D. Scale invariance, symmetries, fractals, and stochastic simulations of atmospheric phenomena. Bull. Am. Meteorol. Soc. 67(1), 21–32 (1986).
Field, C. B. (ed). Managing the risks of extreme events and disasters to advance climate change adaption: special report of the Intergovernmental Panel on Climate Change. oCLC: ocn796030880 (Cambridge University Press, 2012).
Rahmstorf, S. & Coumou, D. Increase of extreme events in a warming world. Proc. Natl. Acad. Sci. 108(44), 17905–17909. https://doi.org/10.1073/pnas.1101766108 (2011).
Chechkin, A. V., Metzler, R., Klafter, J., et al. Introduction to the theory of Lévy flights. In Anomalous Transport. (eds Klages, R. et al.) 129–162, https://doi.org/10.1002/9783527622979.ch5 (Wiley-VCH Verlag GmbH & Co. KGaA, 2008).
Nolan, J. P. Univariate stable distributions: models for heavy tailed data. In Springer Series in Operations Research and Financial Engineering[SPACE]https://doi.org/10.1007/978-3-030-52915-4 (Springer International Publishing, 2020).
Brockmann, D. Human mobility and spatial disease dynamics. In Reviews of Nonlinear Dynamics and Complexity. (ed Schuster, H. G.) 1–24 https://doi.org/10.1002/9783527628001.ch1 (Wiley-VCH Verlag GmbH & Co. KGaA, 2010).
Farsad, N., et al. Stable Distributions as noise models for molecular communication. In 2015 IEEE Global Communications Conference (GLOBECOM). 1–6, https://doi.org/10.1109/GLOCOM.2015.7417583, http://ieeexplore.ieee.org/document/7417583/ (IEEE, 2015).
Van den Heuvel, F. et al. Using stable distributions to characterize proton pencil beams. Med. Phys. 45(5), 2278–2288. https://doi.org/10.1002/mp.12876 (2018).
Shlesinger, M. F., Zaslavsky, G. M., Frisch, U. et al. (eds). Lévy Flights and Related Topics in Physics: Proceedings of the International Workshop Held at Nice, France, 27-30 June 1994, Lecture Notes in Physics, Vol. 450. https://doi.org/10.1007/3-540-59222-9, (Springer Berlin Heidelberg, 1995).
Bartumeus, F. et al. Animal search strategies: a quantitative random-walk analysis. Ecology 86(11), 3078–3087. https://doi.org/10.1890/04-1806 (2005).
James, A., Plank, M. J. & Edwards, A. M. Assessing Lévy walks as models of animal foraging. J. R. Soc. Interface 8(62), 1233–1247. https://doi.org/10.1098/rsif.2011.0200 (2011).
Sims, D. W. et al. Scaling laws of marine predator search behaviour. Nature 451(7182), 1098–1102. https://doi.org/10.1038/nature06518 (2008).
Viswanathan, G. M. et al. Lévy flight search patterns of wandering albatrosses. Nature 381(6581), 413–415. https://doi.org/10.1038/381413a0 (1996).
Lavallée, D. Stochastic modeling of climatic variability in dendrochronology. Geophys. Res. Lett. 31(15), L15202. https://doi.org/10.1029/2004GL020263 (2004).
Ditlevsen, P. D. Observation of \(\alpha\)-stable noise induced millennial climate changes from an ice-core record. Geophys. Res. Lett. 26(10), 1441–1444. https://doi.org/10.1029/1999GL900252 (1999).
Lovejoy, S. & Mandelbrot, B. B. Fractal properties of rain, and a fractal model. Tellus A Dyn. Meteorol. Oceanogr. 37(3), 209. https://doi.org/10.3402/tellusa.v37i3.11668 (1985).
Ditlevsen, P. D. Anomalous jumping in a double-well potential. Phys. Rev. E 60(1), 172–179. https://doi.org/10.1103/PhysRevE.60.172 (1999).
Lucarini, V., Serdukova, L. & Margazoglou, G. Lévy noise versus Gaussian-noise-induced transitions in the Ghil-Sellers energy balance model. Nonlinear Process. Geophys. 29(2), 183–205. https://doi.org/10.5194/npg-29-183-2022 (2022).
Serdukova, L. et al. Metastability for discontinuous dynamical systems under Lévy noise: Case study on Amazonian Vegetation. Sci. Rep. 7(1), 9336. https://doi.org/10.1038/s41598-017-07686-8 (2017).
Yang, F. et al. The tipping times in an Arctic sea ice system under influence of extreme events. Chaos Interdiscip. J. Nonlinear Sci. 30(6), 063125. https://doi.org/10.1063/5.0006626 (2020).
Yuan, Shenglan, Li, Yang & Zeng, Zhigang. Stochastic bifurcations and tipping phenomena of insect outbreak systems driven by \(\alpha\)-stable lévy processes. Math Model Nat. Phenom. 17, 34. https://doi.org/10.1051/mmnp/2022037 (2022).
Zheng, Y. et al. The maximum likelihood climate change for global warming under the influence of greenhouse effect and Lévy noise. Chaos Interdiscip. J. Nonlinear Sci. 30(1), 013132. https://doi.org/10.1063/1.5129003 (2020).
Levins, R. Some demographic and genetic consequences of environmental heterogeneity for biological control. Bull. Entomol. Soc. Am. 15(3), 237–240. https://doi.org/10.1093/besa/15.3.237 (1969).
Skellam, J. G. Random dispersal in theoretical populations. Biometrika 38(1/2), 196. https://doi.org/10.2307/2332328 (1951).
Uhlenbeck, G. E. & Ornstein, L. S. On the theory of the Brownian motion. Phys. Rev. 36(5), 823–841. https://doi.org/10.1103/PhysRev.36.823 (1930).
Applebaum, D. Lévy processes and stochastic calculus, second edition, reprinted 2013 with corrections edn. No. 116 in Cambridge studies in advanced mathematics (Cambridge University Press, 2013).
Sato, Ki. Lévy processes and infinitely divisible distributions. No. 68 in Cambridge Studies in Advanced Mathematics (Cambridge University Press, 1999).
Chechkin, A. V. et al. Lévy flights in a steep potential well. J. Stat. Phys. 115(5/6), 1505–1535. https://doi.org/10.1023/B:JOSS.0000028067.63365.04 (2004).
Guttal, V. & Jayaprakash, C. Changing skewness: an early warning signal of regime shifts in ecosystems. Ecol. Lett. 11(5), 450–460. https://doi.org/10.1111/j.1461-0248.2008.01160.x (2008).
Bury, T. M., Bauch, C. T. & Anand, M. Detecting and distinguishing tipping points using spectral early warning signals. J. R. Soc. Interface 17(170), 20200482. https://doi.org/10.1098/rsif.2020.0482 (2020).
Cairoli, A., Piovani, D. & Jensen, H. J. Forecasting transitions in systems with high-dimensional stochastic complex dynamics: A linear stability analysis of the tangled nature model. Phys. Rev. Lett. 113, 264102. https://doi.org/10.1103/PhysRevLett.113.264102 (2014).
Higham, D. J. An algorithmic introduction to numerical simulation of stochastic differential equations. SIAM Rev. 43(3), 525–546. https://doi.org/10.1137/S0036144500378302 (2001).
Samorodnitsky, G. & Taqqu, M. S. Stable Non-Gaussian Random Processes: Stochastic Models with Infinite Variance (Chapman & Hall, 1994). https://doi.org/10.1201/9780203738818 (oCLC: 1066557814).
Hutzenthaler, M., Jentzen, A., & Kloeden, P. E. Strong convergence of an explicit numerical method for SDEs with nonglobally Lipschitz continuous coefficients. Ann. Appl. Prob. 22(4). https://doi.org/10.1214/11-AAP803 (2012).
del Amo, I. & Ditlevsen, P. Escape by jumps and diffusion by \(\alpha\)-stable noise across the barrier in a double well potential. https://doi.org/10.48550/ARXIV.2308.05684, version Number: 4 (2023).
Gottwald, G. A. & Melbourne, I. Simulation of non-Lipschitz stochastic differential equations driven by \(\alpha\)-stable noise: a method based on deterministic homogenization. Multiscale Model. Simul. 19(2), 665–687. https://doi.org/10.1137/20M1333183 (2021).
Acknowledgements
Lucia S. Layritz thanks Paolo Bernuzzi for helpful discussions on an earlier version of the manuscript.
Funding
Open Access funding enabled and organized by Projekt DEAL.
Lucia S. Layritz is grateful for a PhD fellowship provided by the German Ministry for Education and Research via the Heinrich Boell Foundation. We also acknowledge funding by the Bavarian State Ministry of Science and the Arts in the context of the Bavarian Climate Research Network (bayklif) through its BLIZ project (Grant No. 7831-26625-2017).
Author information
Authors and Affiliations
Contributions
Lucia S. Layritz, Anja Rammig, and Christian Kuehn conceived the idea; Lucia S. Layritz, Ilya Pavlyukevich, and Christian Kuehn designed the methodology and developed the theory. Lucia S. Layritz performed simulations and analyzed the data; Lucia S. Layritz and Ilya Pavlyukevich led the writing of the manuscript. All authors contributed critically to the drafts and gave final approval for publication.
Corresponding author
Ethics declarations
Competing interests
The authors declare no competing interests.
Additional information
Publisher’s note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Appendix: Derivation of \(\gamma _X\)
Appendix: Derivation of \(\gamma _X\)
We are interested in the statistical properties of the Ornstein–Uhlenbeck process X driven by the symmetric \(\alpha\)-stable process \(N^{(\alpha )}\). For \(t\ge 0\), let \(\psi (u)\) be its characteristic function (Fig. 6),
Using (12) with the initial condition \(X_0 = 0\) we obtain
Approximating the stochastic (Itô) integral by the sums over the partition \(0<s_1^{(L)}<\dots <s_L^{(L)}=t\) and using the independence of increments of \(N^{(\alpha )}\) we get
If we map the last expression to (18) and take \(u' = u e^{-k(t - s_{j}^{(L)})}\) as the new Fourier parameter we obtain
Rearranging terms and using the Itô integral again:
Solving the integral, we arrive at the solution

Performance of algorithm. (a) Accuracy of algorithm to estimate \(\gamma _N\) for different values of \(\alpha _N\) (True \(\gamma _N = 1\), sample size is 200). (b) Accuracy of estimating \(\gamma _X\) in dependence of window size per trajectory and number of trajectories used. Multiplying both gives total amount of data points per estimation. Color represents mean square error \(\frac{| \gamma _{\text {true}} - \gamma _{\text {est}} | ^2}{\gamma _{\text {true}}}\) and size represents the standard error \(\frac{\sigma _{\gamma _{\text {est}}}}{\gamma _{\text {true}}}\). Estimation time increases with number of data points (not shown). Grey box indicates parameters chosen for simulation.
Rights and permissions
Open Access This article is licensed under a Creative Commons Attribution 4.0 International License, which permits use, sharing, adaptation, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons licence, and indicate if changes were made. The images or other third party material in this article are included in the article’s Creative Commons licence, unless indicated otherwise in a credit line to the material. If material is not included in the article’s Creative Commons licence and your intended use is not permitted by statutory regulation or exceeds the permitted use, you will need to obtain permission directly from the copyright holder. To view a copy of this licence, visit http://creativecommons.org/licenses/by/4.0/.
About this article

Cite this article
Layritz, L.S., Rammig, A., Pavlyukevich, I. et al. Early warning signs for tipping points in systems with non-Gaussian \(\alpha\)-stable noise. Sci Rep 15, 13758 (2025). https://doi.org/10.1038/s41598-025-88659-0
Received:
Accepted:
Published:
DOI: https://doi.org/10.1038/s41598-025-88659-0
