
Abstract
The design parameters of the transmission directly affect the vehicle’s dynamics and fuel economy, due to the complexity of the tractor’s working conditions and operating modes, the optimization of the transmission design parameters is more difficult. In this paper, an independently designed hydro-mechanical CVT transmission is taken as the research object, and the transmission design parameters are optimized based on the tractor’s whole life-cycle speed usage rate, and the Multi-Objective Genetic Algorithm(MOGA) is used for optimization and solution. In this paper, the fuel consumption rate and hill climbing degree are taken as the optimization objective function, the parameters that have a greater influence on the optimization objectives are selected as the design variables, and the constraints are determined. A multi-objective genetic algorithm based on the Pareto optimality principle combined with experimental design is used to establish a multi-objective optimization model of the transmission device based on modeFrontier, and a global search for optimality is carried out, and a Pareto optimal solution is finally obtained. The results of the study find the optimal solution under the constraints, reflecting the conflicting characteristics between power and fuel economy. The design variables of the Pareto optimal solution obtained through optimization iterations based on the whole life cycle speed usage rate satisfy the matching requirements of the transmission well.
Similar content being viewed by others

Introduction
Tractor operating conditions are complex, and the load changes drastically, so the transmission is required to change the ratio frequently to adapt to the constantly changing working conditions1,2. Traditional high-horsepower tractors are typically equipped with mechanical step transmissions. To address the complex and variable working environment, a large number of gears are necessary, which leads to suboptimal overall performance and frequent shifting operations. In this context, continuously variable transmission (CVT) can effectively address the issue3.
To mitigate these limitations, hydraulic transmissions are integrated with mechanical transmission components to form a hydro-mechanical continuously variable transmission (HMCVT), which preserves the hydraulic transmission’s capability for stepless speed regulation while offering the high efficiency of mechanical transmission4. The power input from the engine is split: one path through the fixed gear transmission, the other through the pump-motor system. Planetary gears are used to merge these power paths. Different transmission methods are achieved by combining various clutches, resulting in a high-efficiency mechanical transmission and an adjustable hydraulic transmission. The transmission includes three modes: hydraulic transmission, mechanical transmission, and mechanical-hydraulic composite transmission. The mechanical-hydraulic composite transmission combines the high-efficiency speed changes of the mechanical transmission with the stepless speed changes of the hydraulic transmission. It offers the advantages of high efficiency, seamless speed adjustment, and the ability to handle large power, making it compatible with various power sources and achieving optimal output characteristics5,6. Tractor working conditions are complex, involving a variable and diverse operating environment with multiple operating modes. Therefore, tractors must operate across a broad range of driving speeds7,8. To meet this demand, transmissions are typically equipped with multiple planetary gears9. Designing HMCV for such complex operating conditions and determining their design parameters are important areas of research.
Zhang et al. analyzed the characteristics of input, output, and compound power shunt devices using a one-dimensional equivalent energy consumption minimum control strategy. They developed an optimal dual planetary gear compound power shunt configuration and examined the impact of the compound power shunt device design and control parameters on engine fuel consumption and battery performance degradation10. Zeng et al. investigated the influence of the structural form and parameter matching on the efficiency of the transmission system in input-coupled hydraulic-mechanical transmission devices used for loaders using the power cycle theory. They concluded that the hydraulic transmission mechanism operates with high efficiency at medium pressure and large displacement ratio and explored feasible measures to improve the efficiency of the hydraulic-mechanical transmission device11. He et al. sought to optimize the power consumption of a purely electric logistics vehicle under New European Driving Cycle (NEDC) conditions. To this end, they designed two-speed transmission gear ratios to replace fixed ones and developed a new shift schedule compatible with electric motors, thereby aiming to reduce the vehicle’s power consumption12. Kihan Kwon et al. analyzed the influence of gear ratios and torque distribution on power consumption and acceleration performance in a two-motor, two-speed drivetrain, utilizing artificial neural networks and adaptive sampling theory to obtain a Pareto optimal solution with performance and efficiency as optimization objectives13. Spanoudakis et al. conducted an experiment using a prototype electric vehicle to evaluate the energy consumption of a single-speed transmission with different gear ratios. They performed dynamic simulations to compare and evaluate different gear ratio settings and to gain insight into their effects on energy consumption. The correlation between experimental and simulation data was used to validate the dynamic model and evaluate the results of selecting the optimal gear ratio14. Walker et al. optimized the ratios of a two-speed gearbox using a genetic algorithm, using the total energy consumption during the Urban Dynamometer Driving Scheme (UDDS) and Highway Fuel Economy Driving Scheme (HWFET) driving cycles as the objective function value to improve the robustness of the optimization results15.
The above studies show that regarding optimization strategies for vehicle transmissions, most focus on typical driving cycle conditions. Due to the complexity of the tractor’s use conditions and the large differences in loads under different working conditions, the driving conditions of the standard cycle cannot accurately represent the actual operating conditions of the tractor. This paper proposes an optimization method for HMCVT design parameters based on the tractor driving speed usage rate. Taking a high-horsepower tractor equipped with an HMCVT as the research object, the design parameters of HMCVT are optimally matched based on a multi-objective genetic algorithm.
Methods
Principles of the powertrain programme
Structural programme
In this paper, the hydraulic-mechanical continuously variable transmission (HMCVT) for high-horsepower tractors (shown in Fig. 1) mainly consists of a manifold mechanism, a hydraulic transmission mechanism, and several clutches and brakes. When the transmission is in operation, the engine power is divided into two circuits by the manifold mechanism: one flows directly into the mechanical transmission mechanism, while the other flows into the hydraulic transmission mechanism via the pump-motor through the gear pair. The two powers are coupled and output through the manifold mechanism. By combining different clutches and brakes, the transmission can achieve mechanical, hydraulic, and hydro-mechanical transmissions.

HMCVT structure schematic diagram.
The combination of the different gears in this transmission is shown in Table 1. The transmission system includes hydraulic gear F(H), mechanical gear F(M), and hydraulic-mechanical gear. The hydraulic-mechanical gear is further divided into split-torque convergence type F(HMv) and split-torque convergence type F(HMs). The hydro-mechanical composite transmission gear can be categorized into split-torque convergence types based on the different positions of planetary rows’ inputs and outputs. The split-torque convergence type hydro-mechanical gear performs excellently in high-power requirement scenarios, while the split-torque convergence type hydraulic mechanical gear excels in low-power requirement scenarios16.
Speed regulation characteristics
The speed ratio of the transmission is the ratio of the output shaft speed nout to the input shaft speed nin, expressed as:
Based on Fig. 1, the following speed relationship can be obtained
Based on the kinematics of the planetary gear mechanism, the rotational speed relationship between the sun wheel, gear ring, and planetary carrier can be expressed as:
where k is the characteristic parameter of the planetary gear mechanism; ns is the rotational speed of the sun wheel (r/min); nr is the rotational speed of the gear ring (r/min); nc is the rotational speed of the planetary carrier (r/min).
When C1, C3, and C5 are engaged, the engine output power is transmitted only through the hydraulic system. According to Eqs. (1) and (2), the hydraulic gear speed ratio can be obtained.
When C1 and C2 are engaged, the front and rear planetary rows are solidly coupled into a single unit, and the engine transmits power directly to the output. According to Eq. (1), the mechanical gear ratio can be obtained
When C2, C3, and C4 are engaged, the front planetary row functions as a shunt mechanism, and the rear planetary row is solidly coupled into a single unit, which effectively serves the role of a fixed-axis gear pair to achieve the split-speed convergent torque transmission. The engine output power is divided into two paths: hydraulic and mechanical transmission, which are coupled directly at the transmission output. Using Eqs. (1), (2), and (3), the machine-hydraulic composite transmission speed ratio for the split-speed convergent torque gear can be obtained.
When C1, C3, and C4 are engaged, the front planetary rows are solidly coupled into a single unit to function as a shunt mechanism, and the rear planetary rows function as a converging mechanism to achieve the torque-sharing and speed-converging transmission. The engine output power is divided into two paths: hydraulic and mechanical transmission, which are coupled directly at the transmission output through the rear planetary row. Using Eqs. (1), (2), and (3), the machine-hydraulic composite transmission torque-splitting speed convergence gear ratio can be obtained.
The transmission ratio is expressed as follows:
Where, ne denotes the engine speed, r/min; rq represents the rolling radius of the drive wheel, m (this paper assumes rq = 0.4 m); ua denotes the speed, km/h; iz denotes the main gearbox ratio (this paper assumes iz = 22.4).
Power system selection and matching
The tractor’s power system, as the power source of the transmission system, directly affects the vehicle’s dynamics and fuel economy. Therefore, before optimizing the transmission system, it is necessary to first select a power system that matches.
Traction characteristics of tractors
The traction characteristics reflect the tractor’s driving capacity and are primarily assessed by the rated traction force and traction power. The rated traction force is defined by the traction resistance encountered during operation. If the traction resistance exceeds the rated traction force, it may lead to excessively low running speeds, diminished productivity, and an excessively high slip rate, resulting in reduced traction efficiency and potentially damaging the soil aggregate structure17. The traction balance equation for tractor operation is expressed as
Where, FD is the driving force of the tractor, N; Ff is the travelling resistance, N; FT is the traction resistance, N.
Since ploughing is the most common and demanding tractor operation, the calculation of rated tractive effort must prioritize the power requirements for ploughing18.
The traction resistance equation for ploughing operation is given by.
Where Z represents the number of ploughs; b is the width of individual ploughs in cm; h is the ploughing depth in cm; and k is the soil specific resistance in N/cm². In this paper, 1LYF-550 ploughs were selected, and according to the chosen model of the agricultural tools, the following values were used: z = 5; b = 50 cm; h = 35 cm; and k = 7 N/cm².
Therefore, the traction resistance, Fp = 61.25 kN.
Considering the load fluctuations during ploughing operations, the rated tractive effort is typically 10 to 20% greater than the tractive resistance. Thus, the rated tractive effort can be expressed as:
Calculated that, \({F_{TN}}=1.2{F_P}=73.5{\text{kN}}\)
The rated traction power can be defined as,
Where v1 represents the basic operating speed in km/h, ηt denotes the traction efficiency, and β is the power reserve coefficient. In this context, v1 is set to an average speed of 7 km/h for ploughing operations, ηt is set at 0.68, and β is set at 1.2. The total power demand of the system is then calculated as:\({P_d} \geqslant 177{\text{kW}}\).
Power system selection
The engine serving as the power source for the transmission system, is a critical determinant of the vehicle’s dynamics and fuel economy, necessitating its selection as a primary consideration. Based on the total system power calculated in this study, the WP6.180E40 diesel engine was selected.
The selection of the hydraulic system should be adapted to the power source, and the following relationship between the maximum power of the variable pump and the rated power of the engine should be satisfied:
Where QPmax represents the maximum flow rate of the pump, PPmax denotes the maximum oil pressure, and ηP indicates the efficiency of the pump. The SAUER-055 series variable pumps and quantitative motors fulfill these requirements.
Optimized design of HMCVT parameters
Tractor speed characteristics
This study conducts a multi-objective optimization of the HMCVT design parameters based on the tractor’s speed usage rate throughout its life cycle. This study utilized data from Resch statistics to generate a histogram depicting speed utilization throughout the tractor’s life cycle, as shown in Fig. 219.

Tractor full life cycle speed utilization statistical chart.
As shown in the graph, speeds between 4 km/h and 20 km/h are relatively highly utilized. Tractors operating within this speed range are typically engaged in fieldwork, whereas other speed ranges are primarily utilized for starting and road transport.
Considering the speed requirements for various working conditions in China and the corresponding gears of the HMCVT proposed in this paper, the related gears and speeds are presented in Table 2.
In conjunction with Fig. 2, it is evident that heavy-duty operating conditions correspond to a high speed utilization rate. This observation forms the basis for the multi-objective optimization conducted in this study.
Considering the speed requirements for various working conditions in China and the corresponding gears of the HMCVT proposed in this paper, the related gears and speeds are presented in Table 2. In conjunction with Fig. 2, it is evident that heavy-duty operating conditions correspond to a high speed utilization rate. This observation forms the basis for the multi-objective optimization conducted in this study.
Optimization of design variables
The fixed-shaft gear ratios and the characteristic parameters of planetary gears, which determine the transmission ratios, significantly impact the vehicle’s dynamics and economy. The engine speed, torque, and displacement ratio of the hydraulic mechanism, corresponding to different transmission speed ratios, greatly influence the overall vehicle performance. According to Sect. 1.2, the optimized design variables encompass the ratios of fixed-axis gears 1, 4, 5, 6, and 7 (i1, i4, i5, i6, i7); the characteristic parameters of the front and rear planetary gears (k1, k2); the displacement ratio of the hydraulic mechanism (e); and the engine speed and torque (ne, Te).
Therefore, the design variables selected for this study are:
Optimization of the objective function
The parameter optimization of the HMCVT aims to achieve optimal driveability and enhance the fuel economy of the tractor. In this study, vehicle dynamics and fuel economy serve as the dual objective functions. Since this study focuses on operating conditions, the split-torque convergent hydraulic-mechanical gears more suitable for scenarios with higher power demand—are selected. The optimization objectives include hill climbing ability and fuel consumption rate, where the former reflects the vehicle’s passing performance, and the latter indicates the vehicle’s transient fuel consumption.
Fuel economy evaluation indicators
Fuel economy evaluation indicators for vehicles typically include 100-kilometre fuel consumption and fuel consumption rate. In this study, the fuel consumption rate is selected as the economic evaluation index to reflect transient fuel consumption conditions. The fuel consumption rate ge is related to the engine speed ne and torque Te and is typically expressed in grams of fuel consumed per unit of effective work output (kW·h), representing the amount of fuel consumed per unit of power output from the engine20.
Taking the selected WP6.180E40 diesel engine as the object of study, the fuel consumption rate, obtained by fitting the engine test data, can be expressed as follows21:
Where ge represents fuel consumption rate, g/kW·h; ne represents engine speed, r/min; Te represents engine torque, N·m.
Indicators for dynamics evaluation
The primary working conditions of tractors can be divided into operational conditions and road transport conditions. Given the different resistance loads under various operating conditions, these conditions can be further divided into heavy-duty and light-duty categories. The HMCVT incorporates a hydraulic transmission for starting; a mechanical transmission for road transport; a torque-splitting hydro-mechanical transmission for heavy-duty operation; and a torque-splitting hydro-mechanical transmission for light-duty operation. Considering the high utilization of speeds during heavy-duty operations, the dynamic evaluation indices under hydro-mechanical gears of the split-moment convergence type are selected for optimization. The dynamic evaluation indices include acceleration time, maximum speed, and hill climbing capability. Given the complexity of the tractor’s operating environment, which includes encountering various slopes in hilly areas, the consideration of passability is essential for evaluating the tractor’s performance.
In this paper, hill-climbing capability is selected as a dynamic evaluation index. The hill-climbing capability function can be derived from the vehicle drive force-travel resistance equilibrium diagram and the definition of hill-climbing capability.
Where FD is the driving force, N; Ff is the rolling resistance, N; Fw is the air resistance, N; and G is the vehicle weight, N. In this study, G = 81,300 N is considered.
Optimization of constraints
To ensure proper tractor operation, certain parameters must meet specific constraints when designing the HMCVT. First, the gears must satisfy a defined speed range22. Thus, the optimization constraints, based on the driving speed range for each gear, can be expressed as follows:
Where, vF(H), vF(M), vF(HMv), and vF(HMs) represent the hydraulic gear speed, mechanical gear speed, hydraulic-mechanical gear (split-torque convergence) speed, and hydraulic-mechanical gear (split-moment convergence) speed, respectively, km/h.
The relationship between vehicle speed and the transmission ratio can be expressed as follows:
In addition, the common gear ratio and planetary gear characteristic parameters need to satisfy the following conditions:
When optimizing the design parameters of the HMCVT, it is necessary to make the vehicle sufficiently dynamic with good fuel economy. As a result, solutions with poor power or fuel economy are considered not to meet the design requirements, and the efficiency of the optimization can also be improved by using the gradient climb and fuel economy as constraints in the optimization objective, i.e., a gradient climb of more than 18° is required, and the fuel consumption rate is less than 240 g/kw·h.
Multi-objective optimization problems
Optimal matching of the parameters of the HMCVT requires the optimal design of the parameters of the main components of the transmission to improve the dynamics while reducing the fuel consumption while satisfying the individual constraints. This type of optimization problem with multiple conflicting objectives is known as a multi-objective optimization problem with the mathematical expression23,24,
Where, \(X=( {x_1},{x_2}, \cdots ,{x_D})\),X is a D-dimensional vector, F(X) is the objective vector, and gj represents the constraints. The space spanned by the objective vector is called the objective space, and the subspace of the objective space that satisfies the constraints is known as the feasible space.
When n = 1, the multi-objective optimization problem simplifies to a single-objective optimization problem, which has a globally optimal solution. However, in the general case of n > 1, globally optimal solutions usually do not exist due to the inherent conflicts among the objective functions. Instead, there may be an uncountable set of solutions known as non-dominated solutions, where improving one objective cannot be achieved without degrading at least one other objective. These non-dominated solutions represent trade-offs between different objectives.
Pareto optimality principle
In the context of the multi-objective optimization problem, denoted as \(\hbox{min} {\operatorname{f} _n}{\text{(}}X{\text{)}}\), a design variable X is considered a non-dominated solution, or a Pareto optimal solution, if it satisfies the following conditions within the feasible domain of design variables: for all other design variables \({X^*}\), and without violating any constraints, each objective function \({\operatorname{f} _n}\) must fulfill \({\operatorname{f} _n}{\text{(}}{X^*}{\text{)}} \leqslant {\operatorname{f} _n}{\text{(}}X{\text{)}}\), and there must exist at least one objective function \({\operatorname{f} _n}\) for which \({\operatorname{f} _n}{\text{(}}{X^*}{\text{)}}<{\operatorname{f} _n}{\text{(}}X{\text{)}}\), then the design variable is the non-inferior solution of the multi-objective optimisation problem, i.e. the Pareto optimal solution. In a multi-objective optimisation problem, the Pareto optimal solution does not exist uniquely, but is a set of Pareto optimal solutions consisting of multiple Pareto optimal solutions.
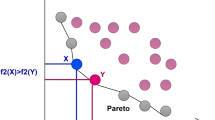
For the multi-objective optimization problem studied in this paper, the Pareto solution can be illustrated by Fig. 3.

Pareto solution diagram.
Figure 3 depicts a multi-objective optimization problem with conflicting optimization objectives. The figure shows that the increase of the objective function f1 needs to be at the cost of the decrease of the objective function f2. Where points A and B are Pareto optimal solutions, point A is biased towards optimizing the objective function f2 and point B is biased towards optimizing the objective function f125.
Genetic algorithms
HMCVT involve numerous design parameters, making it difficult to achieve optimal results through straightforward experiments and calculations. In contrast to traditional optimization methods, multi-objective genetic algorithms are capable of exploring extensive search spaces and addressing complex multi-objective optimization problems.
This study employs a multi-objective genetic algorithm for the optimization process, illustrated in Fig. 426.

Multi-objective genetic algorithm flow chart.
With the following algorithmic flow27:
-
1.
Define the fitness function, which comprises a bi-objective function focusing on power and fuel economy, aiming to minimize the values as indicated in Eq. 3.2.
-
2.
Binary encoding was used to generate an initial population, P(t), randomly, and the dual-objective fitness values for power and fuel economy were computed for this initial population.
-
3.
Apply genetic algorithm procedures to the initialized populations, including selection, crossover, and mutation.
-
4.
Generate a new population from crossover and mutation, denoted as P(t + 1). Identify the less fit individuals in P(t + 1), replace the non-dominant individuals in P(t) with these less fit individuals, and return to step 2.
-
5.
The iteration stops when the number of generations exceeds a pre-set value.
-
6.
Determine the Pareto-optimal set of solutions from the final population.
The algorithm parameters are configured as follows: the initial population size is 40 individuals, the number of evolutionary generations is 30, the crossover probability is 0.5, the selection probability is 0.05, and the mutation probability is 0.1.
Optimization based on modeFrontier
To perform multi-objective optimization, this study utilizes modeFrontier (MF) to develop the optimization model. MF is a specialized optimization design platform developed by ESTECO that automates the evaluation of design schemes and completes the iterative process of “operation-evaluation-modification of parameters-re-operation” automatically.
This study employs a combination of Design of Experiments (DOE) and Multi-Objective Genetic Algorithm-II (MOGA-II) to conduct a global search for multi-objective optimization problems. MOGA-II utilizes an advanced multi-search elite algorithm that incorporates a novel elite operator, which preserves high-quality solutions and avoids premature convergence to a locally optimal frontier. A multi-objective optimization model based on MF, as illustrated in Fig. 5, is established to identify the optimal solution.

Transmission optimization model based on modeFrontier.
Results
Using the MOGA-II algorithm, a total of 1200 individuals were generated. Among these, 507 individuals violated the constraints, while 693 were feasible solutions. The post-processed history chart is displayed in Fig. 6, showcasing the evolution of each variable across the iteration steps. It is evident that, as the number of iteration steps increases, the values of the two objective functions gradually decline and ultimately converge to a narrower range. This convergence indicates that the algorithm progressively enhances the optimization of the objective functions throughout the process, ultimately yielding a more stable solution.

Historical chart.
The discrete point plots of the design variables for each feasible solution after optimization are presented in Fig. 7.

Discrete point diagram.
The horizontal axis of the graph represents the gradient, while the vertical axis represents the fuel consumption rate. Green circular dots denote feasible solutions, whereas yellow circular dots denote solutions that violate the constraints. Solutions located closer to the lower right indicate a lower fuel consumption rate and a higher gradient, thus representing better outcomes. Consequently, the optimal solution, identified as the Pareto optimal solution, is characterized by its design variables as follows:\(X=(2.0,1.6,1.0,1.0,0.357,2.5,4.0,0.83,2300,425)\), this time\({\operatorname{F} _{\hbox{min} }}(X)=(24.52,222.76)\).
The discrete point matrix plot is illustrated in Fig. 8.

Discrete matrix diagram.
The discrete point matrix plot yields the following conclusions:
-
1.
Dynamics: The parameters e, ne, Te, k1, i1, i5, i6, and i7 influence the climbing gradient in the following order: 0.427, 0.348, 0.108, 0.282, 0.132, -0.477, -0.241, and − 0.206, respectively. The influences of k2 and i4 are relatively smaller.
-
2.
Economy: The parameters e, ne, Te, k1, k2, i1, i5, and i7, which have a greater impact on fuel economy, are − 0.183, -0.105, -0.350, -0.094, 0.138, -0.108, 0.169, and 0.180, respectively. The impacts of i4 and i6 are relatively smaller.
-
3.
There is a negative correlation between gradient climb and fuel economy, with an impact coefficient of -0.127, reflecting the interplay between dynamics and economy.
Based on the above optimization results, the relevant parameters are i1 = 2, i4 = 1.6, i5 = 1, i6 = 1, i7 = 0.357, k1 = 2.5, and k2 = 4. The speed regulation characteristic curve, obtained from these parameters, is illustrated in Fig. 9. It can be seen that the design variables derived from the optimization results effectively meet the design requirements of the transmission system28.

Speed regulation characteristic curve.
Conclusion
The study emphasizes the significance of transmission design parameters in enhancing the power and fuel economy of tractors. Given the complex and varied operating conditions of tractors, selecting appropriate design parameters is crucial for optimizing the overall performance of a Hydro-Mechanical Continuously Variable Transmission (HMCVT). This research focuses on a specific HMCVT device, identifies its assembly scheme, and introduces a novel method for optimizing HMCVT design parameters based on the speed usage rate over the entire life cycle of the tractor. This approach addresses the limitations of standard driving cycle conditions, which may not accurately reflect the tractor’s complex usage patterns.
The study takes a high-horsepower tractor’s HMCVT as the research subject, establishing an optimization model using modeFRONTIER. A global search is then conducted to identify the optimal solution by considering the gradient climbing capability and fuel consumption rate as dual objectives. The optimal solution under the given constraints is determined, leading to the identification of the HMCVT’s design parameters. The resulting design parameters, as shown by the speed regulation characteristic curve, successfully meet the transmission’s design requirements.
Data availability
The datasets used and/or analysed during the current study available from the corresponding author on reasonable request.
References
Chen, W. et al. Analysis of the shift quality of a hydrostatic power split continuously variable cotton picker. Mech. Sci. 12, 589–601. https://doi.org/10.5194/ms-12-589-2021 (2021).
Xia, Y., Sun, D., Qin, D. & Zhou, X. Optimisation of the power-cycle hydro-mechanical parameters in a continuously variable transmission designed for agricultural tractors. Biosyst. Eng. 193, 12–24. https://doi.org/10.1016/j.biosystemseng.2019.11.009 (2020).
Mocera, F. & Somà, A. Analysis of a parallel hybrid electric tractor for agricultural applications. Energies 13, 3055. https://doi.org/10.3390/en13123055 (2020).
Zhang, G. et al. Mechanical efficiency of HMCVT under steady-state conditions. Shock Vib. 2021, e4275922. https://doi.org/10.1155/2021/4275922 (2021).
Cheng, Z., Lu, Z. & Qian, J. A new non-geometric transmission parameter optimization design method for HMCVT based on improved GA and maximum transmission efficiency. Comput. Electron. Agric. 167, 105034. https://doi.org/10.1016/j.compag.2019.105034 (2019).
Cheng, Z. & Lu, Z. System response modeling of HMCVT for tractors and the comparative research on system identification methods. Comput. Electron. Agric. 202 https://doi.org/10.1016/j.compag.2022.107386 (2022).
Zhu, Z., Lai, L., Sun, X., Chen, L. & Cai, Y. Design and analysis of a novel mechanic- electronic-hydraulic powertrain system for agriculture tractors. IEEE Access. 9, 153811–153823. https://doi.org/10.1109/ACCESS.2021.3126667 (2021).
Strapasson Neto, L., Jasper, S. P., Kmiecik, L. L., da Silva, T. X. & Savi, D. Performance of agricultural tractor with and without automatic transmission and engine rotation management. Rev. bras. eng. agríc Ambient. 25, 498–502. https://doi.org/10.1590/1807-1929/agriambi.v25n7p498-502 (2021).
Siddique, M. A. A., Kim, T. J. & Kim, Y. J. Technical trend of the power shift transmission (PST) of agricultural tractor. 드라이브· 컨트롤. 17, 68–75 (2020).
Zhang, F., Yang, F., Xue, D. & Cai, Y. Optimization of compound power split configurations in PHEV bus for fuel consumption and battery degradation decreasing. Energy 169, 937–957. https://doi.org/10.1016/j.energy.2018.12.059 (2019).
Wan, L., Dai, H., Zeng, Q., Sun, Z. & Tian, M. Characteristic analysis and co-validation of hydro-mechanical continuously variable transmission based on the wheel loader. Appl. Sci. 10, 5900. https://doi.org/10.3390/app10175900 (2020).
He, L., Xie, D., Wang, J. & Shi, Q. Design and optimization of the shift schedule and gear ratios for a two-speed pure electric logistics vehicle. In 2019 3rd Conference on Vehicle Control and Intelligence (CVCI) 1–5. https://doi.org/10.1109/CVCI47823.2019.8951579 (2019).
Kwon, K., Seo, M. & Min, S. Efficient multi-objective optimization of gear ratios and motor torque distribution for electric vehicles with two-motor and two-speed powertrain system. Appl. Energy. 259, 114190. https://doi.org/10.1016/j.apenergy.2019.114190 (2020).
Spanoudakis, P. et al. Efficient gear ratio selection of a single-speed drivetrain for Improved electric vehicle energy consumption. Sustainability 12, 9254. https://doi.org/10.3390/su12219254 (2020).
Walker, P. D., Rahman, A., Zhu, S. & Zhang, N. Modelling, simulations, and optimisation of electric vehicles for analysis of transmission ratio selection. Adv. Mech. Eng. 5, 340435. https://doi.org/10.1155/2013/340435 (2013).
Du, J., Yuan, S. & Guo, Z. Study on the characteristics of Hydro-mechanical transmissions for vehicle. J. Mech. Transmission. 32, 51–53 (2008). (in Chinese).
Chen, Y., Xie, B., Du, Y. & Mao, E. Powertrain parameter matching and optimal design of dual-motor driven electric tractor. Int. J. Agricultural Biol. Eng. 12, 33–41. https://doi.org/10.25165/j.ijabe.20191201.3720 (2019).
Bin, X., Hao, L., Zheng-He, S. & En-Rong, M. Powertrain system design of medium-sized hybrid electric tractor. Inf. Technol. J. 12, 7228. https://doi.org/10.3923/itj.2013.7228.7233 (2013).
Resch, R. Leistungsverzweigte Mehrbereichsfahrantriebe Mit Kettenwandlern (Technische Universität, 2004).
Lee, J. W., Kim, J. S. & Kim, K. U. Computer simulations to maximise fuel efficiency and work performance of agricultural tractors in rotovating and ploughing operations. Biosyst. Eng. 142, 1–11. https://doi.org/10.1016/j.biosystemseng.2015.11.012 (2016).
Fu, B. et al. IOP Conf. Ser. : Earth Environ. Sci. 108, 052054 https://doi.org/10.1088/1755-1315/108/5/052054 (2018).
Li, B. et al. Optimization method of speed ratio for power-shift transmission of Agricultural Tractor. Machines 11, 438. https://doi.org/10.3390/machines11040438 (2023).
Ngatchou, P., Zarei, A. & El-Sharkawi, A. Pareto multi objective optimization. In Proceedings of the 13th International Conference on, Intelligent Systems Application to Power Systems 84–91 https://doi.org/10.1109/ISAP.2005.1599245 (IEEE, 2005).
Salman, S. & Alaswad, S. Mitigating the impact of congestion minimization on vehicles’ emissions in a transportation road network. Int. J. Industrial Eng. Manage. 11, 40–49. https://doi.org/10.24867/IJIEM-2020-1-251 (2020).
Zhang, J. Research on configuration and parameters optimization method of single Planetary Gear multi-mode EVT Hybrid Powertrain under multi-objective conditions. (Chong Qing Univ. https://doi.org/10.27670/d.cnki.gcqdu.2020.000798 (2022). (in Chinese).
Gao, S., Daaboul, J. & Le Duigou, J. Layout and scheduling optimization problem for a reconfigurable manufacturing system. Int. J. Industrial Eng. Manage. 12, 174–186. https://doi.org/10.24867/IJIEM-2021-3-286 (2021).
Shi, F., Wang, H., Yu, L. & others. MATLAB Intelligent Algorithms 30 Case Studies. (2011) (in Chinese).
Zhu, Z., Gao, X. & Zhu, Y. Reverse design of a hydro-mechanical continuously variable transmission. Mech. Sci. Technol. Aerosp. Eng. 35, 545–550. https://doi.org/10.13433/j.cnki.1003-8728.2016.0409 (2016). (in Chinese).
Funding
This research was funded by the China Postdoctoral Science Foundation(2023M731370), the Open Foundation of the National Key Laboratory of Special Vehicle Design and Manufacturing Integration Technology, GZ2023KF007, the Open Foundation of the State Key Laboratory of Fluid Power and Mechatronic Systems, GZKF-202214, the National Natural Science Foundation of China (52272435,52225212, U20A20333, U20A20331).
Author information
Authors and Affiliations
Contributions
All authors contributed to the study conception and design. Conceptualization, Z.Z. and R.H.; methodology, R.H.; software, R.H.; validation, H.Z., D.W. and L.C.; formal analysis, L.C.; investigation, H.Z.; resources, Z.Z. and R.H.; data curation, Z.Z. and R.H.; writing—original draft preparation, Z.Z. and R.H.; writing—review and editing, Z.Z. and R.H.; visualization, Z.Z. and R.H.; supervision, L.C.; project administration, L.C., H.Z. and L.C.; funding acquisition, Z.Z., H.Z., D.W. and L.C.
Corresponding author
Ethics declarations
Competing interests
The authors declare no competing interests.
Additional information
Publisher’s note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
Open Access This article is licensed under a Creative Commons Attribution-NonCommercial-NoDerivatives 4.0 International License, which permits any non-commercial use, sharing, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons licence, and indicate if you modified the licensed material. You do not have permission under this licence to share adapted material derived from this article or parts of it. The images or other third party material in this article are included in the article’s Creative Commons licence, unless indicated otherwise in a credit line to the material. If material is not included in the article’s Creative Commons licence and your intended use is not permitted by statutory regulation or exceeds the permitted use, you will need to obtain permission directly from the copyright holder. To view a copy of this licence, visit http://creativecommons.org/licenses/by-nc-nd/4.0/.
About this article

Cite this article
Zhu, Z., Hou, R., Zhang, H. et al. Multi-objective optimization of design parameters for tractor hydro-mechanical continuously variable transmissions. Sci Rep 15, 13261 (2025). https://doi.org/10.1038/s41598-025-89425-y
Received:
Accepted:
Published:
Version of record:
DOI: https://doi.org/10.1038/s41598-025-89425-y
