
Abstract
Fall-inducing systems have two critical applications. One is to obtain the biomechanical features of falling, and the other is to systematically train individuals and reduce the risk of falling. While the former application necessitates the occurrence of falls, the latter does not require fall-inducing perturbations to be excessively intense. The purposes of the study were to investigate the effects of perturbation intensities (a combination of speeds and durations) on the number of falls, fall rates, and maximum loading forces resulting from slips induced by a split-belt treadmill. Twenty-four young adults (12 males and 12 females) completed 16 randomized trials (12 perturbation trials and 4 false trials). The forces between a safety harness and a rail were used to identify falls and non-falls and to assess the maximum loading force during falls. Although the number of falls, fall rates, and maximum loading force significantly increase as the slipping speed increases for both durations, the relative risk analysis shows that fall risk significantly increases as the slipping speed increases regardless of the duration. These findings may contribute to developing design criteria for controlled perturbations using a split-belt treadmill, aimed at enhancing our understanding of fall biomechanics and informing fall prevention training programs.
Similar content being viewed by others

Introduction
Across all age groups, the consequences of falls affect quality of life and everyday activities1,2,3, or result in fractures, concussions, and even death4,5,6. Although various causes can result in falls, more than 50% of falls are caused by slips, and more than 25% are caused by trips in all age groups7,8,9. When a slip occurs, falling backward is particularly risky since it often results in serious injuries such as traumatic brain injury, back injury, and limb fracture9,10,11.
Although the risk of falling is affected by several physical, neurological, metabolic, and environmental factors, the ability to rapidly restore the body’s stability after a gait perturbation (e.g., slipping, tripping, or stumbling) is definitely critical to preventing falls8,12,13. Mechanical obstacles, moveable platforms, pulling cables, and slippery contaminants (e.g., oil) have been the most common methods for generating gait perturbations (i.e., slips and trips) that could lead to a fall14,15,16. These methods were primarily used to explore the biomechanical mechanisms leading to a fall. Additionally, multiple studies have demonstrated that perturbation-based training, which involves training the body’s compensatory responses following repeated exposure to slips and trips, is more task-specific than conventional balance and strength exercises for preventing falls17,18,19,20. Two systematic reviews indicated that individuals can substantially improve their body responses after multiple exposures to unexpected slips and trips21,22. Another study found that repeated slip perturbation-based training reduces the risk of falling in older adults by 50% after 12 months of training23. These findings underscore the potential benefits of using gait perturbations to better understand the body’s post-fall responses or motor adaptations after fall prevention training.
However, the most common methods employing mechanical obstacles, moveable platforms, pulling cables, or slippery contaminants lack the ability to quantitatively control perturbations, making them unsuitable for practical fall-inducing and fall prevention training when perturbations need to be systematically designed and administered, and thus difficult to popularize. For example, the pre-located obstacles or contaminants may allow the participants to anticipate the upcoming perturbation, which can possibly assist them in preventing falls and reduce the potential training effects resulting from unpredictability. Alternatively, instrumented treadmill-based systems equipped with force plates can address the issue of uncontrollable or predictable gait perturbations24,25,26,27,28; treadmill belt can be precisely controlled to induce perturbation with selected parameters (e.g., speed, acceleration, duration, etc.) at any arbitrary moment. Reproducing perturbation experiments or training sessions under consistent treadmill settings can ensure reliable outcomes, and the settings can be modified and adjusted in a controlled manner to provide appropriate perturbations for the various applications.
Previous overground walking studies have demonstrated that a perturbed foot’s slipping dynamics, such as speed, duration, and distance affect the likelihood of falling29,30,31. Therefore, there have been attempts to evaluate various perturbation intensities using a single-belt instrumented treadmill. Using feet in a standing position and three peak belt speeds, one research group found more falls at 1.8 m/s compared to 0.9–1.2 m/s32. However, these findings may not be generalizable to dynamic contexts (i.e., falls caused by different slipping speeds during walking). Other studies have investigated whether perturbation-based training using different slipping accelerations, durations, and distances modulated by a single-belt instrumented treadmill could lead to fewer overground falls14,15,33,34,35. Although these studies have found that the training group had fewer overground falls than the control group without training, they have not quantitatively examined fall rates as a function of different slipping accelerations, durations, and distances. More importantly, the previous studies used a single-belt instrumented treadmill, which caused both feet to slip simultaneously14,15,33,34,35,36, rather than a split-belt instrumented treadmill.
A split-belt instrumented treadmill allows for independent control of each belt’s speed, enabling perturbations that replicate conditions observed in overground studies, where the speeds of the trailing and leading foot can differ16,29,30,31,37. Nevertheless, prior studies using a split-belt instrumented treadmill have primarily employed a uniform speed and/or acceleration, and have focused on biomechanical and physiological responses and learning effects after induced perturbations such as trips and slips27,28,38. Consequently, a gap in these previous studies exists in our knowledge of how different perturbation intensities, modulated by a split-belt instrumented treadmill, affect backward slip-falls (i.e., foot slipping forward). It is crucial to precisely determine the perturbation intensities during split-belt walking, as excessively high or low perturbation intensities may not adequately reflect realistic conditions within the controlled parameters of a split-belt treadmill. Low perturbation intensities make it difficult to fully understand biomechanical responses to falls, while high perturbation intensities make recovery impossible. Specifically, low perturbation intensities may not sufficiently challenge the body’s balance, limiting the ability to fully observe and analyze compensatory biomechanical responses during falls, while excessively high perturbation intensities can overwhelm the body’s recovery mechanisms, leading to inevitable falls without providing insight into effective recovery strategies. Furthermore, for perturbation-based training aimed at reducing falls, low perturbation intensities may reduce training effects, while high perturbation intensities may cause fear of falling, resulting in reduced confidence, compromised motor responses, and altered posture and gait patterns. Therefore, the purposes of the study were to investigate the effects of different levels of the perturbation intensity on the number of falls, fall rates, and maximum loading forces resulting from slips induced by a split-belt treadmill.
In this study, to systematically analyze the effects of perturbation intensities on backward slip-falls, we refined the previous version of our fall-inducing system and exploited the controllable and unpredictable gait perturbation induced by the split-belt treadmill. We selected three speeds and two durations based on the results of previous overground and treadmill walking studies29,30,31, identified falls and non-falls based on conventional harness load cell criteria, and evaluated the number of falls, fall rates, and maximum loading forces during falls as a function of the six perturbation intensities (i.e., the combination of three speeds and two durations).
Methods
Slip-inducing system and perturbation intensities
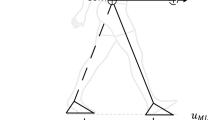
The slip-inducing system’s hardware and software were refined and implemented based on our previous fall-inducing developments27,28. Figure 1 shows the hardware components, consisting of (1) an instrumented split-belt treadmill equipped with two force plates beneath each belt (Bertec Corporation, Columbus, OH, USA) and (2) a load cell (LCCD-250, Omega Engineering Inc., CT, USA) attached between a safety harness and a stationary walking rail.
The custom software was developed and implemented using C + + based on our previous studies27,28. Figure 2 shows the custom software’s flowchart. In real time, the custom software sampled the vertical ground reaction forces (GRFs), speeds of the treadmill’s belts, and loading forces from a load cell at a rate of 100 Hz. The raw GRFs were low-pass filtered with a 10 Hz cut-off frequency to eliminate high-frequency noise27,28. Using filtered GRFs, a gait recognition algorithm detected heel strike and toe-off events based on a pre-specified threshold (i.e., 2% of GRFs normalized to each participant’s weight)39. Slip perturbation was applied to a randomly selected foot (either left or right) and step using one of six perturbation intensities.
The six perturbation intensities were determined by combining three speeds and two durations. These parameters were chosen considering the possible effects of participants’ gait speed on recovery from slips40 and the range of foot speed and duration during overground slips29,30,31. In particular, previous overground studies have shown that individuals can successfully recover from induced falls when the foot’s slipping speed is less than or equivalent to their preferred walking speed (PWS), whereas falls occur when they slip at a speed that approximately reaches 2×PWS29,30,31. Therefore, we chose three speeds of 0.5×PWS (slow), 1×PWS (moderate), and 2×PWS (fast).
Previous studies have indicated that the compensatory limb (i.e., the non-perturbed limb) reacts within approximately 300 ms after a slip, regardless of whether the recovery is successful or a fall occurs40. This finding implies that falls are likely to occur under two scenarios. First, even with a relatively rapid response time (i.e., < 300 ms), a fast slipping speed can cause an extended slipping distance, leading to a fall. Second, even at a relatively slow or moderate slipping speed, a longer slipping duration can increase the distance and likelihood of falling, consistent with findings from previous overground studies16,29,30,31,37 that reported slip distances ranging from 31.80 cm to 55.30 cm, which is equivalent to approximately 318 ms to 553 ms based on a walking speed of 1 m/s on a split-belt treadmill. Considering these, we chose two distinct durations of 300 ms and 500 ms.

Slip-inducing system and its hardware components.

Custom software’s flowchart.
Although previous overground studies have identified recovery or falls based on individual parameters (e.g., slipping speed, duration, or distance)29,30,31, they have not investigated the combined effects of these parameters. In this study, we examined six perturbation intensities, combining three speeds (0.5×PWS, 1×PWS, and 2×PWS) and two durations (300 ms and 500 ms). For all perturbation intensities, one belt for the selected foot was accelerated anteriorly, causing backward loss of balance. The acceleration of one belt was automatically calculated and applied based on the three speeds (i.e., 0.5×PWS, 1×PWS, and 2×PWS). We used different values of acceleration to achieve the intended belt speed at the heel strike of the selected foot, even with the non-zero response time of the system and the short time window between the toe-off and heel strike. Resultantly, the average accelerations were 4.54 ± 0.13 m/s2 for 0.5×PWS, 5.87 ± 0.18 m/s2 for 1×PWS, and 7.75 ± 0.25 m/s2 for 2×PWS, as confirmed by the recorded speed profiles. The corresponding belt acceleration durations were 0.47 ± 0.09 s for 0.5×PWS, 0.39 ± 0.10 s for 1×PWS, and 0.28 ± 0.11 s for 2×PWS, respectively.
Figure 3 shows a representative belt speed profile. Considering the response time of the treadmill’s control system and motor characteristics when abruptly changing the direction of the belt’s speed, we accelerated the belt providing the slip perturbation immediately after the perturbed foot’s toe-off just before the perturbation step, and the perturbation persisted for 300 ms or 500 ms after the perturbed foot’s heel strike. After the perturbation, the two belts stopped when the loading force recorded by the load cell exceeded 30% of body weight41, which indicated a fall; otherwise, the belt providing the slip perturbation returned to pre-perturbation speed, which indicated a non-fall. For data analysis, the custom software stored GRFs, belt speeds, loading forces at a rate of 100 Hz, fall and non-fall events in a binary manner (1 or 0), foot selection (left or right), perturbed step (number), and perturbation intensity (from 1 to 6).

A representative speed profile of one belt recorded from the treadmill for one participant. The participant’s PWS was 0.97 m/s. The perturbation intensity was 0.5×PWS with 300 ms. A positive (+) speed indicates anterior belt movement, whereas a negative (-) speed indicates posterior belt movement.
Participants
Twenty-four healthy young adults (12 females and 12 males; age: 23.25 ± 2.47 years; height: 170.17 ± 6.78 cm; weight: 65.82 ± 10.50 kg) participated. Potential participants were excluded if they had musculoskeletal dysfunctions, peripheral sensory diseases, neurological disorders, or surgical histories that impaired balance or gait performance. The recruited participants were right-footed, as identified by their self-reported foot dominance, and naïve to the purpose of the study. All participants read and signed the informed consent form for both study participation and publication of identifying information and images in an online open-access publication. The Seoul National University Institutional Review Boards approved the study protocol (IRB No. 2307/001–001), which was in accordance with the Helsinki Declaration.
Experimental protocols
There were no practice trials with the slip perturbation. All participants received no information about slip intensity, perturbation foot, perturbation onset, and recovery. Before an experiment session began, each participant’s PWS on the treadmill was determined by the conventional protocol42. Then, each participant wore noise-cancelling headphones (QC45, Boss, USA) to mask the noise from the treadmill motors, which might possibly enable the participant to anticipate the onset of the perturbation. Each participant also wore a safety harness (Fig. 1). To minimize the impact of wearing safety harness and ensure the validity of the load cell criteria, the vertical hip height in a seated position while wearing the safety harness was set to 37% of the participant’s height41.
The experiment session included 16 randomized trials, consisting of 12 perturbation trials (six perturbation intensities applied to both the left and right foot) and four false trials without any perturbation applied to either foot. False trials were included to reduce any potential learning effects that could result from repeated exposure to slip perturbations. Our previous findings have shown that learning effects emerge after three trials of gait perturbation, particularly in response to trip perturbations28. However, when a false trial without a slip perturbation was included randomly among the perturbation trials, these learning effects were not observed27. Therefore, each false trial was randomly included within the sequence of three consecutive perturbation trials. During 12 perturbation trials, the slip perturbation was randomly applied between the 26th and 50th steps to minimize the possibility of anticipating a slip occurrence.
During all the experimental trials, each participant was instructed to walk as normally as possible while keeping their gaze fixed on an “X” mark positioned 3 m ahead at eye level and not to hold onto the safety harness. White noise was played through the noise-cancelling headphones to remove ambient noise, such as belt running sounds. If a participant fell according to the load cell criteria (i.e., 30% of body weight41), both belts were immediately stopped for safety, and the trial was terminated. Otherwise, a participant continued walking for 20 steps at the pre-perturbation speed (i.e., PWS) after the perturbation, to ensure enough steps for successful recovery and a return to normal walking27,28. Each trial lasted less than 90 s. Consecutive trials were separated by 30 s of rest.
Data and statistical analyses
The outcome measures (number of falls and non-falls, their rates, and fall occurrence for the 12 trials and maximal loading force for perturbation trials involving falls) were analyzed using SPSS (IBM Corp., Armonk, NY, USA). Fall occurrence was a categorical variable (i.e., fall (1) or non-fall (0)), while maximum loading forces were continuous variables.
The preliminary analysis was conducted using generalized estimating equations (GEE) to evaluate whether specific factors, including gender, the side of the perturbed foot (left or right), and the number of perturbation trial repetitions, which were analyzed to assess potential learning effects, had statistically significant effects on the two primary outcomes (i.e., fall occurrence and maximum loading forces). This approach enabled the evaluation of within-subject variability while accounting for potential interactions between these factors and the outcomes. The preliminary analysis indicated no significant effects of gender, the perturbed foot, or the number of perturbation trials. Therefore, subsequent GEE analyses focused on examining the main effects of the three speeds, two durations, and their interactions. The least significant difference method was employed for multiple pairwise comparisons to identify factors influencing the main and interaction effects on the two outcomes. Additionally, associations between fall occurrence and perturbation intensities were evaluated by calculating odds ratios (OR) with 95% confidence intervals (CI) and relative risk (RR). Specifically, the analysis considered each significant pair among the combinations of three perturbation speeds and two perturbation durations. These pairwise comparisons were followed by a GEE analysis to account for the correlated nature of repeated measures data. Statistical significance for GEE analyses was determined at a two-sided p-value of less than 0.05.
Sample size justification
We used G*Power 3.1 to estimate the sample size based on a preliminary repeated measures analysis of variance using data from 10 participants. The preliminary analysis revealed a moderate effect size (Cohen’s f = 0.25) for the relationship between perturbation intensities and fall outcomes (i.e., fall occurrence and maximum loading forces) across all trials, excluding false trials. Assuming a power level of 0.80, an alpha level of 0.05, and a moderate correlation between repeated measures (r = 0.5), the power analysis suggested that a minimum of 22 participants was required to achieve adequate statistical power. To account for potential dropouts, we recruited a total of 24 participants, ensuring sufficient data for robust statistical analysis.
Results
Number of non-falls and falls and their rates
The mean and standard deviation of the PWS across all participants were 1.00 and 0.11 m/s. Table 1 reports the number of falls and non-falls and their rates as a function of the three speeds and two durations. The overall fall rate was 76%, with a tendency for the fall rate to increase as speed and duration increased. The duration from the slip onset to the event of fall was 0.43 ± 0.21 s for 0.5×PWS, 0.36 ± 0.19 s for 1×PWS, and 0.35 ± 0.14 s for 2×PWS, respectively.
The GEE analysis results indicated that the main effects of the three speeds and the two durations on fall occurrence were significant (p < 0.0001 and p = 0.026), but no significant interaction effects (p = 0.407). Figure 4 shows the fall rate as a function of the three speeds and two durations, including the statistical significance of multiple pairwise comparisons. For the 300 ms duration, the results of statistical analyses showed that the 0.5×PWS had significantly lower fall rates than the 1×PWS (p < 0.0001) and the 2×PWS (p < 0.0001). The OR values with 95% CI were 3.50 (95% CI: 1.43, 8.58; RR: 1.52) for the 1×PWS versus the 0.5×PWS and 4.60 (95% CI: 1.78, 11.86; RR: 1.60) for the 2×PWS versus the 0.5×PWS, respectively.

Fall rate as a function of the three speeds and two durations (*p < 0.05, **p < 0.01, and ***p < 0.0001).
For the 500 ms duration, the results of statistical analyses showed that 0.5×PWS had significantly lower fall rates than the 1×PWS (p < 0.0001) and the 2×PWS (p < 0.0001), and the 1×PWS had significantly lower fall rates than the 2×PWS (p = 0.041). The OR values with 95% CI were 5.44 (95% CI: 1.95, 15.22; RR: 1.56) for the 1×PWS versus the 0.5×PWS, 36.56 (95% CI: 4.65, 287.15; RR: 1.74) for the 2×PWS versus the 0.5×PWS, and 6.71 (95% CI: 0.78, 58.08; RR: 1.12) for the 2×PWS versus the 1×PWS, respectively.
Among the three speeds, the 300 ms had significantly lower fall rates than the 500 ms only for the 2×PWS (p = 0.008). The OR value with 95% CI was 9.40 (95% CI: 1.23, 78.41; RR: 1.18) for the 500 ms versus the 300 ms.
Maximum loading forces due to falls
The GEE analysis results revealed significant main effects of the three speeds (p < 0.0001), but no significant main effects of the two durations (p = 0.810) or interaction effects (p = 0.403) on the maximum loading forces. Figure 5 shows the maximum loading forces as a function of the three speeds and two durations, including the statistical significance of multiple pairwise comparisons. For the 300 ms duration, the 2×PWS resulted in significantly higher maximum loading forces than the 0.5×PWS (p = 0.002). For the 500 ms duration, the 0.5×PWS resulted in significantly lower maximum loading forces than the 1×PWS (p = 0.001) and the 2×PWS (p < 0.0001). Additionally, the 1×PWS resulted in significantly lower maximum loading forces than the 2×PWS (p = 0.007).

Maximum loading forces as a function of the three speeds and two durations (*p < 0.05, **p < 0.01, and ***p < 0.0001). Error bars indicate the standard error of the corresponding mean.
Discussion
The substantial expenses associated with falls underscore the need to design effective training programs for fall prevention and comprehensively understand the biomechanics of falls. One potentially effective strategy to improve individuals’ ability to restore balance after perturbation and reduce the risk of falling is to repetitively expose them to unexpected gait perturbations in a well-controlled training setting21,22. To implement this scheme, it is critical to design and apply gait perturbations with proper intensities. Likewise, to reveal the biomechanics of falls comprehensively, it is imperative to perform a well-designed experiment that includes perturbations with sufficient intensity. One critical obstacle to achieving these goals is a lack of our knowledge about the adequacy of the perturbations; there is uncertainty over the “proper” or “sufficient” levels of the perturbation intensity.
In this study, to contribute to filling this research gap, we investigated the effects of six different perturbation intensities on the fall occurrences and rates following slip perturbations by exploiting a split-belt treadmill system which can apply perturbation in a precisely controlled manner. We also quantified the maximum loading forces resulting from falls. The results showed a significant increase in the rate of falls as the speed of the induced slip increased regardless of the duration, except for the 500ms duration at 2xPWS, and a higher occurrence of falls with a slip duration of 500 ms compared to 300 ms, when the slipping speed was twice the PWS. Maximum loading forces increased as the slipping speed increased, whereas the slip duration had no significant effect regardless of the slip speed.
Previous studies have not specifically investigated the effects of different levels of slip intensity during treadmill walking on slip outcomes, which makes it difficult to directly compare with the results of this study. Nevertheless, our results are consistent with those of previous studies on overground slips, which established a correlation between falls and the speed, duration, and distance of the slipping foot16,29,30,31. In previous overground studies16,29,30,31,37, when participants recovered, the foot slipping speed was 1.43 ± 0.55 m/s, similar to the PWS of 1.32 ± 0.22 m/s. In contrast, when participants fell, the foot slipping speed was significantly higher at 2.21 ± 0.53 m/s compared to their PWS of 1.34 ± 0.16 m/s, nearly twice their PWS. Additionally, the slipping distance of a perturbed foot ranged approximately 15.34 cm to 45.34 cm for recovery and 31.80 cm to 55.30 cm for falling, with some overlap between the two ranges. Furthermore, the slipping duration of a perturbed foot was nearly identical, being 0.31 ± 0.12 s for recovery and 0.30 ± 0.14 s for falling. However, it is reasonable to infer that a slow slipping speed and shorter distance likely resulted in stable recovery steps, whereas a faster slipping speed and longer distance led to unstable steps and falls. Taken together, these previous findings support the selection of three speeds and two durations assessed in this study. More importantly, this study demonstrates that adjusting speed and duration can effectively alter slipping distances, thereby potentially influencing the likelihood of falls. The estimated slipping distances, calculated by multiplying the belt speed by the time interval between the fall event and the heel strike of the perturbed foot, for each perturbation intensity were: 15 cm (range: 13.3 cm to 16.7 cm) for 0.5×PWS at 300 ms, 30 cm (range: 26.7 cm to 33.3 cm) for 1×PWS at 300 ms, 60 cm (range: 53.4 cm to 66.6 cm) for 2×PWS at 300 ms, 25 cm (range: 22.5 cm to 27.8 cm) for 0.5×PWS at 500 ms, 50 cm (range: 44.5 cm to 55.5 cm) for 1×PWS at 500 ms, and 100 cm (range: 89.0 cm to 111.0 cm) for 2×PWS at 500 ms. Therefore, the six perturbation intensities (i.e., the combination of three speeds and two durations) identified and assessed in this study could be appropriate for investigating falls or training recovery responses on split-belt instrumented treadmills, which contrasts with the outcomes of previous studies that have mainly focused on compensatory responses or learning effects15,27,28,36,38.
The results of the RR analysis showed that fall risk significantly increased as slipping speed increased, ranging from 1.12 to 1.78 times regardless of slipping duration. Only the 2×PWS showed a significant increase in fall risk when the duration increased from 300 ms to 500 ms, which we attribute to a large difference in slipping distances between the duration of 300 ms and 500 ms (i.e., 60 cm vs. 100 cm, compared to 15 cm vs. 25 cm for the 0.5×PWS, and 30 cm vs. 50 cm for the 1×PWS).
Consistent with the results of this study’s fall rate analysis for the three speeds and two durations, the maximum loading force significantly increased as the slipping speed increased in the trials involving falls as shown in Fig. 5. The average maximum loading forces ranged from 42.96 to 50.72% of the participant’s body weight. The slip duration had no significant effect on the maximum loading forces for 0.5×PWS, 1×PWS, and 2×PWS as shown in Fig. 5.
The primary limitation of this study is the lack of comprehensive whole-body kinematic measurements, particularly regarding the responses of both the perturbed and unperturbed limbs, such as landing position and timing, which can directly impact slip outcomes. Additionally, this study did not explicitly examine the compensatory movements of the trailing foot (i.e., the unperturbed foot). Our primary objective was to quantify the direct effects of perturbation intensity on fall likelihood and impact loading, rather than analyzing postural control mechanisms and kinematic data on reactive stepping strategies. However, we acknowledge that including such analyses would provide further insight into the biomechanical mechanisms underlying slip recovery. Other limitations include participant homogeneity (i.e., healthy young adults), the absence of speed less than 0.5×PWS, the number of duration conditions, and the lack of consideration for the potential impact of white noise (e.g., influence on motor performance43). Additionally, the slip perturbation wave (i.e., square-shaped) was designed based on overground slip outcome data from previous studies33,35, which may result in different outcomes when using a triangle-shaped wave15,38. While this study aimed to replicate overground slip conditions using a split-belt treadmill, it is important to acknowledge the inherent difference between overground and treadmill walking44,45,46,47,48,49.
Future research integrating a kinematic measurement system, such as a full-body motion capture system, with our slip- inducing system will allow us to comprehensively evaluate whole-body kinematics after slip disturbances with varying intensities, analyze slip outcomes related to the recovery response of the unperturbed limb, and explore potential learning effects on kinematic and recovery responses to slip perturbations with different intensities. Specifically, quantifying the compensatory stepping responses of the trailing foot will yield more comprehensive insights into its biomechanical contributions to fall recovery. We also plan to include populations at high risk of falling (e.g., older adults, people with neurological conditions, etc.) and investigate the effects of speeds less than 0.5×PWS, diverse durations, and multiple shapes of the perturbation profiles including square and triangle on falls and non-falls. Furthermore, we plan to refine the current system to better replicate practical slip conditions.
Conclusion
This is the first study to systematically assess the effects of perturbation intensities on backward slip-falls induced by a split-belt treadmill. We investigated the effects of six perturbation intensities combining the three speeds and two durations on falling and found a positive correlation between the speed of the induced slip perturbation and the fall rates. The maximum loading forces during falls also showed a positive correlation with the increase in slipping speed but were not affected by the durations.
Our findings provide preliminary insights that may support the development of design criteria for gait perturbations using split-belt treadmills. These criteria can be valuable for studying fall biomechanics through controlled, fall-inducing perturbations and for designing training protocols with progressively adjusted perturbations to facilitate balance recovery. This study suggests that, within a split-belt treadmill environment, factors such as perturbation speed and slip distance may influence the likelihood of falls. The methods, protocols, and findings of this study may serve as a reference for future investigations on fall mechanisms and prevention using controlled split-belt treadmill settings.
Data availability
All datasets generated and/or analyzed during the current study are available from the corresponding author on reasonable request.
References
Hartholt, K. A. et al. Societal consequences of falls in the older population: injuries, healthcare costs, and long-term reduced quality of life. J. Trauma. 71, 748–753 (2011).
Salari, N., Darvishi, N., Ahmadipanah, M., Shohaimi, S. & Mohammadi, M. Global prevalence of falls in the older adults: a comprehensive systematic review and meta-analysis. J. Orthop. Surg. Res. 17, 334 (2022).
WHO & Falls (2012).
Oliver, D. et al. Strategies to prevent falls and fractures in hospitals and care homes and effect of cognitive impairment: systematic review and meta-analyses. Bmj 334, 82 (2007).
Burns, E. & Kakara, R. Deaths from falls among persons aged > 65 years - United States, 2007–2016. MMWR Morb Mortal. Wkly. Rep. 67, 509–514 (2018).
Verma, S. K. et al. Falls and fall-related injuries among community-dwelling adults in the United States. PLoS One. 11, e0150939 (2016).
Berg, W. P., Alessio, H. M., Mills, E. M. & Tong, C. Circumstances and consequences of falls in independent community- dwelling older adults. Age Ageing. 26, 261–268 (1997).
Heijnen, M. J. & Rietdyk, S. Falls in young adults: perceived causes and environmental factors assessed with a daily online survey. Hum. Mov. Sci. 46, 86–95 (2016).
Courtney, T. K., Sorock, G. S., Manning, D. P., Collins, J. W. & Holbein-Jenny, M. A. Occupational slip, trip, and fall-related injuries–can the contribution of slipperiness be isolated? Ergonomics 44, 1118–1137 (2001).
Amandus, H., Bell, J., Tiesman, H. & Biddle, E. The epidemiology of slips, trips, and falls in a helicopter manufacturing plant. Hum. Factors. 54, 387–395 (2012).
Stevens, J. A., Mahoney, J. E. & Ehrenreich, H. Circumstances and outcomes of falls among high risk community-dwelling older adults. Inj. Epidemiol. 1 (2014).
Talbot, L. A., Musiol, R. J., Witham, E. K. & Metter, E. J. Falls in young, middle-aged and older community dwelling adults: perceived cause, environmental factors and injury. BMC Public Heal. 5, 86 (2005).
Raina, P. et al. Assessing global risk factors for non-fatal injuries from road traffic accidents and falls in adults aged 35–70 years in 17 countries: a cross-sectional analysis of the prospective urban rural epidemiological (pure) study. Inj. Prev. 22, 92–98 (2016).
Lurie, J. D., Zagaria, A. B., Pidgeon, D. M., Forman, J. L. & Spratt, K. F. Pilot comparative effectiveness study of surface perturbation treadmill training to prevent falls in older adults. BMC Geriatr. 13, 1–8 (2013).
Yang, F., Bhatt, T. & Pai, Y. C. Generalization of treadmill-slip training to prevent a fall following a sudden (novel) slip in over-ground walking. J. Biomech. 46, 63–69 (2013).
Cham, R. & Redfern, M. S. Heel contact dynamics during slip events on level and inclined surfaces. Saf. Sci. 40, 559–576 (2002).
Grabiner, M. D., Crenshaw, J. R., Hurt, C. P., Rosenblatt, N. J. & Troy, K. L. Exercise-based fall prevention: can you be a bit more specific? Exerc. Sport Sci. Rev. 42, 161–168 (2014).
Grabiner, M. D. et al. Trunk kinematics and fall risk of older adults: translating biomechanical results to the clinic. J. Electromyogr. Kinesiol. 18, 197–204 (2008).
Granacher, U., Muehlbauer, T., Zahner, L., Gollhofer, A. & Kressig, R. W. Comparison of traditional and recent approaches in the promotion of balance and strength in older adults. Sports Med. 41, 377–400 (2011).
Oddsson, L. I. E., Boissy, P. & Melzer, I. How to improve gait and balance function in elderly individuals—compliance with principles of training. Eur. Rev. Aging Phys. Act. 4, 15–23 (2007).
McCrum, C., Gerards, M. H. G., Karamanidis, K., Zijlstra, W. & Meijer, K. A systematic review of gait perturbation paradigms for improving reactive stepping responses and falls risk among healthy older adults. Eur. Rev. Aging Phys. Act. 14, 3 (2017).
Taylor, Z., Walsh, G. S., Hawkins, H., Inacio, M. & Esser, P. Perturbations during gait: a systematic review of methodologies and outcomes. Sensors (Basel) 22 (2022).
Bieryla, K. A., Madigan, M. L., Nussbaum, M. A., Wojcik, L. A. & King, G. A. Perturbation training can reduce community-dwelling older adults’ annual fall risk: a randomized controlled trial. J. Gerontol. Med. Sci. 72, 1232–1238 (2017).
Owings, T. M., Pavol, M. J. & Grabiner, M. D. Mechanisms of failed recovery following postural perturbations on a motorized treadmill mimic those associated with an actual forward trip. Clin. Biomech. (Bristol Avon). 16, 813–819 (2001).
Shapiro, A. & Melzer, I. Balance perturbation system to improve balance compensatory responses during walking in old persons. J. Neuroeng. Rehabil. 7, 32 (2010).
Shimada, H., Obuchi, S., Furuna, T. & Suzuki, T. New intervention program for preventing falls among frail elderly people: the effects of perturbed walking exercise using a bilateral separated treadmill. Am. J. Phys. Med. Rehabil. 83, 493–499 (2004).
Lee, B. C., Choi, J., Ahn, J. & Martin, B. J. The different contributions of the eight prefrontal cortex subregions to reactive responses after unpredictable slip perturbations and vibrotactile cueing. Front. Hum. Neurosci. 17, 1236065 (2023).
Lee, B. C., Choi, J. & Martin, B. J. Roles of the prefrontal cortex in learning to time the onset of pre-existing motor programs. PLoS One 15, e0241562 (2020).
Allin, L. J., Nussbaum, M. A. & Madigan, M. L. Feet kinematics upon slipping discriminate between recoveries and three types of slip-induced falls. Ergonomics 61, 866–876 (2018).
Brady, R. A., Pavol, M. J., Owings, T. M. & Grabiner, M. D. Foot displacement but not velocity predicts the outcome of a slip induced in young subjects while walking. J. Biomech. 33, 803–808 (2000).
Troy, K. L., Donovan, S. J., Marone, J. R., Bareither, M. L. & Grabiner, M. D. Modifiable performance domain risk-factors associated with slip-related falls. Gait Posture. 28, 461–465 (2008).
Shin, S., Simpkins, C., Ahn, J. & Yang, F. Impact of standing perturbation intensities on fall and stability outcomes in healthy young adults. J. Biomech. 168, 112123 (2024).
Lee, A., Bhatt, T., Liu, X., Wang, Y. & Pai, Y. C. Can higher training practice dosage with treadmill slip-perturbation necessarily reduce risk of falls following overground slip? Gait Posture. 61, 387–392 (2018).
Liu, X., Bhatt, T. & Pai, Y. C. Intensity and generalization of treadmill slip training: high or low, progressive increase or decrease? J. Biomech. 49, 135–140 (2016).
Wang, Y. et al. Can treadmill-slip perturbation training reduce immediate risk of over-ground-slip induced fall among community-dwelling older adults? J. Biomech. 84, 58–66 (2019).
Sessoms, P. H. et al. Method for evoking a trip-like response using a treadmill-based perturbation during locomotion. J. Biomech. 47, 277–280 (2014).
Troy, K. L. & Grabiner, M. D. Recovery responses to surrogate slipping tasks differ from responses to actual slips. Gait Posture. 24, 441–447 (2006).
Debelle, H., Harkness-Armstrong, C., Hadwin, K., Maganaris, C. N. & O’Brien, T. D. Recovery from a forward falling slip: measurement of dynamic stability and strength requirements using a split-belt instrumented treadmill. Front. Sports Act. Living. 2, 82 (2020).
Jacquelin Perry, M. Gait analysis: normal and pathological function (SLACK, 2010).
Bhatt, T., Wening, J. D. & Pai, Y. C. Influence of gait speed on stability: recovery from anterior slips and compensatory stepping. Gait Posture. 21, 146–156 (2005).
Yang, F. & Pai, Y. C. Automatic recognition of falls in gait-slip training: harness load cell based criteria. J. Biomech. 44, 2243–2249 (2011).
Pathak, P. et al. Application of vibration to the soles reduces minimum toe clearance variability during walking. PLoS One 17, e0261732 (2022).
Lubetzky, A. V. et al. Auditory input and postural control in adults: a narrative review. JAMA Otolaryngol. Neck Surg. 146, 480–487 (2020).
Pearce, M. et al. Energy cost of treadmill and floor walking at self-selected paces. Eur. J. Appl. Physiol. Occup. Physiol. 52, 115–119 (1983).
Murray, M., Spurr, G., Sepic, S., Gardner, G. & Mollinger, L. Treadmill vs. floor walking: kinematics, electromyogram, and heart rate. J. Appl. Physiol. 59, 87–91 (1985).
Alton, F., Baldey, L., Caplan, S. & Morrissey, M. A kinematic comparison of overground and treadmill walking. Clin. Biomech. 13, 434–440 (1998).
White, S. C., Yack, H. J., Tucker, C. A. & Lin, H. Y. Comparison of vertical ground reaction forces during overground and treadmill walking. Med. Sci. Sports Exerc. 30, 1537–1542 (1998).
Savelberg, H. H., Vorstenbosch, M. A., Kamman, E. H., van de Weijer, J. G. & Schambardt, H. C. Intra-stride belt-speed variation affects treadmill locomotion. Gait Posture. 7, 26–34 (1998).
Tielke, A., Ahn, J. & Lee, H. Non-ideal behavior of a treadmill depends on gait phase, speed, and weight. Sci. Rep. 9, 12755 (2019).
Acknowledgements
The authors thank Hyeonhee Jung, Yoojin Choi, Jeongin Moon, Hyunji Kim, Eunsik Choi, Taegyun Park, Seongwon Hwang, Jangwhan Ahn, Ilseung Park, Jungho Lee, Junyeon Hwang, Hong Min, Chaelynne Kim, Seungeun Lee, Jeongbin Park, and Chaeyoung Rhee for their data collection assistance.
Funding
Research was supported in part by the Brain Pool Program funded by the Ministry of Science and ICT through the National Research Foundation of Korea (RS-2024-00446461), the grant of the Korea Health Technology R&D Project through the Korea Health Industry Development Institute (KHIDI), funded by the Ministry of Health & Welfare (No. HK23C0071), Industrial Technology Innovation Program (No. 20007058; (development of safe and comfortable human augmentation hybrid robot suit), and Industrial Strategic Technology (No. 20018157) funded by the Ministry of Trade, Industry & Energy (MOTIE, Korea), the National Research Foundation of Korea grant funded by the Korean Government (MSIT) (No. RS-2023-00208052), and the grants supported by Ministry of Culture, Sports and Tourism (RS-2024-00396700).
Author information
Authors and Affiliations
Contributions
J.A. and B.L. conceived the study and supervised data collection, C.L. and B.L. developed the system, C.L., J.A., andB.L. designed the experimental protocols, interpreted the results, and drafted the manuscript, C.L. and B.L. performed data collection, data analysis, and statistical analysis, J.A. and B.L. acquired the research funding, and all authors reviewed and revised the manuscript.
Corresponding authors
Ethics declarations
Competing interests
The authors declare no competing interests.
Additional information
Publisher’s note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
Open Access This article is licensed under a Creative Commons Attribution-NonCommercial-NoDerivatives 4.0 International License, which permits any non-commercial use, sharing, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons licence, and indicate if you modified the licensed material. You do not have permission under this licence to share adapted material derived from this article or parts of it. The images or other third party material in this article are included in the article’s Creative Commons licence, unless indicated otherwise in a credit line to the material. If material is not included in the article’s Creative Commons licence and your intended use is not permitted by statutory regulation or exceeds the permitted use, you will need to obtain permission directly from the copyright holder. To view a copy of this licence, visit http://creativecommons.org/licenses/by-nc-nd/4.0/.
About this article

Cite this article
Lee, C., Ahn, J. & Lee, BC. The effects of perturbation intensities on backward slip-falls induced by a split-belt treadmill. Sci Rep 15, 5108 (2025). https://doi.org/10.1038/s41598-025-89531-x
Received:
Accepted:
Published:
Version of record:
DOI: https://doi.org/10.1038/s41598-025-89531-x
