
Abstract
The 50/60 Hz alternating current (AC) electric power has been the standard and most flexible energy source powering our modern societies for one and a half centuries since the war of the currents: AC versus direct current (DC). A reactive power concept that was introduced at the beginning of the AC power was very useful for circuit/system analysis, design, control, optimization, and ultimately for more efficient and stable generation, transmission, distribution, and consumption. The initial reactive power theory was based on single-phase sinusoidal AC power to capture inductive and capacitive power that yields to net-zero average power over one fundamental cycle. Soon it was expanded to non-sinusoidal AC power and finally to instantaneous three-phase AC power. However, these reactive power theories remain separate and limited to special cases and have never been consolidated and made valid to all cases. Today, more widespread adoption of power electronics and renewable energy is bringing back DC power into the electric grids. The reactive power concept has never been applied to DC power systems. There is no reactive power in DC power systems according to the existing reactive power theories. Do DC power systems really have no reactive power? Capacitors and inductors are widely used in DC just like in AC power systems. Are they not reactive power components? Why are they different from their AC counterparts? Furthermore, are batteries active or reactive power components? What about active devices like power converters (or inverters) with AC (or DC) on one side and DC (or AC) on the other? Do they generate or consume reactive power? Finally, what about AC and DC hybrid power systems? How to define reactive power in such a complex power system that has a multitude of loads, buses, and sources? Is there reactive power between any two loads, any two buses, or any two sources in a power system and what is the total reactive power in such a complex power system as a whole? As the motivation and goal of this paper to answer the above basic questions, to unify the existing AC reactive power theories and to ultimately provide theoretical and insightful guidance for system analysis, design, control, efficiency, optimization, and operation of complex power systems, a concept of spacetime (both spatial and temporal) active and reactive power (pq) theory—the spatiotemporal aspect of active and reactive power—is developed for both AC and DC power systems. The theoretical definitions and physical meanings of the spacetime reactive power will be developed, and real applications and thought experiments/cases/exercises will be explored and discussed. The developed mathematics to define the active (or real) and reactive (or imaginary) power—p and q respectively by dot (scalar) and cross (vector) products of multi-dimension spacetime vectors and time-space mapping principle/law can have some fundamental implications as well.
Similar content being viewed by others
Introduction and general description of AC and DC power systems
The war of the currents: AC versus DC power began in the 1870s and ended in the early 1890s. Since then, for over a century, AC power has been the standard for large-scale power generation, transmission, distribution, and consumption. This is primarily because of its two superior features: (1) the simple and natural mechanic structure of AC generators and (2) the flexibility of voltage step-up for long-distance power transmission and voltage step-down to suitable levels for end-use via AC transformers. A rotating electric machine/generator is naturally AC, whereas a DC machine/generator has an additional/artificial mechanical rectifier—commutator and brush—to convert AC to DC. An AC power generator produces a sinusoidal voltage with a fixed fundamental frequency (50–60 Hz) and a constant magnitude expressed in the root-mean-square (rms) value. A linear AC load draws a sinusoidal current with the same frequency, a certain rms amplitude, and a phase angle with reference to its AC voltage. Because of energy storage elements in the circuit/load, however, a circuit/load current may contain some components with a 90° phase angle shift from its generator (or source) voltage—due to capacitance and inductance in the circuit/load. This current component with a 90°-phase-angle shift consumes an average-zero net power (or energy) over one fundamental cycle. Therefore, an AC current (or its AC power) has two components: (1) active (or real) current and its power (p) that contributes to the average power/energy delivery or consumption over a fundamental cycle (or over half a cycle to be exact) and (2) reactive (or imaginary) current and its power (q) that does not contribute to the average power/energy delivery or consumption. As a result, the concept of reactive current and reactive power was born in the 1920s1,2. This original reactive power theory is based on the average of single-phase AC systems with steady-state periodic current waveforms and treats a three-phase (3-phase) AC system as the sum of three single-phase AC systems.
In the 1980s, an instantaneous reactive power theory was proposed, which is based on instantaneous 3-phase voltages and currents3. The theory is interesting and insightful because it captures the instantaneous power that circulates among the phases with net-zero power from the three-phase sources. However, the theory relies on the 3-phase to 2-phase transformation with an assumption of no zero-sequence voltage and current—that is, the sum of the 3-phase voltages and the sum of 3-phase currents must be zero, respectively. As a result, it is valid only for three-phase AC power systems with no zero-sequences. In addition, according to this theory, there is no instantaneous reactive power in a single-phase AC power system. In the 1990s, a more generalized instantaneous reactive power theory was formulated to cover all three-phase AC power system situations even when zero-sequence voltages and/or currents exist4. In the 2000s, a non-active power theory based on a single-phase time-average definition was proposed to address more complicated AC power systems with distortions and irregular waveforms5,6. Some discussions about all these definitions are provided in7,8.
Almost in parallel with the above-mentioned research and development of the instantaneous reactive power theory, many researchers have been mending Budeanu’s original reactive current and reactive power definitions to make it valid for non-sinusoidal systems and proposing instantaneous power definitions based on frequency domain, 3-/2-dimension vector forms, or quaternions9,10,11,12,13,14,15,16,17. Their main purpose was for harmonic power (or power quality) analysis, power measurement and instrumentation. The reactive power research work so far along both this line and the above line is all limited to single-phase AC, three-phase AC, or polyphase AC systems under the consideration of a single load. It has never been expanded to the system or subsystem levels, such as aggregated loads or sources, DC systems, or AC & DC hybrid systems.
The widespread adoption of power electronics, renewable energy sources, and energy storage has led to the increased prevalence of low- and variable-frequency AC wind (or unsynchronized AC) and DC solar and fuel cell power generation, delivery, and utilization. In addition, the electricity consumption from small electronic loads to large motor drives and data centers, all require DC power. Today’s power systems are becoming increasingly decentralized, unsynchronized, forming an AC and DC hybrid network consisting of millions to billions of renewable sources, power electronics-controlled transmission/distribution lines, battery energy storage systems (BESS), electric vehicles (EVs), and electronic loads, where most of them are highly dynamic and unpredictable. As a result, system analysis, design, optimization, and operation of such complex power systems are becoming more problematic, challenging, and daunting. For instance, a part of today’s power system is DC with a uni-directional current flow (that is, maintaining the same polarity throughout its entire lifetime), but these DC systems’ voltage and current may change/fluctuate in amplitude with time. In other DC circuits or situations, voltage and/or current may change with time in both amplitude and polarities, resulting in bi-directional power flow. A bi-directional power converter for battery energy storage is a good example, as it allows current to flow in both directions depending on charging and discharging operation. In a sense, this can be considered AC, but at a much longer time scale than the traditional 50/60 Hz AC current.
Figure 1 illustrates such a complex m-dimension AC and DC power system that has a multitude of sources, buses, terminals, loads, transmission and distribution networks/subsystems, and micro-grids. Furthermore, each source, each transmission/distribution line, or each load may include supporting components/devices such as transformers, inductors, capacitors, batteries, and power electronics (i.e., power converters). Therefore, the integer, m for such an m-dimension system can be any integer greater than zero (0). For even a small power grid or micro-grid, the dimension number, m can easily exceed 10,000. We define an electric source as a generator to produce voltage and current by converting one of the three basic categories of energy—kinetic (energy of motion), potential (stored energy), and radiative (energy of light)—to electricity. Electric loads, such as motors, heaters, EVs, batteries, etc., perform the opposite process, converting electric energy back to one of the three basic energy forms to perform desired work. Electric components/devices are used to control, support, and/or temporarily store energy. Thus, they can be used anywhere within sources, transmission and distribution networks, and electric loads.

General illustration of a complex m-dimension AC and/or DC power system. For any of today’s power grids, the dimension number, m can easily be over 10,000.
The existing reactive power theories developed so far have been very useful for traditional AC power systems. On the other hand, we have traditionally deemed that DC power systems have no reactive power, or at least we have no definition and have never applied the reactive power concept to DC power systems. As DC power becomes more widespread, a natural and interesting question arises: Do DC power systems have reactive power? If so, how to define it? Further, is it possible to define a unified reactive power for both AC and DC power systems and even a hybrid power system like in Fig. 1, where many sources, transmission/distribution networks, and loads spread over space (or spatial intervals) and time (or temporal intervals)? Note that we use “space” and “spatial”, “time” and “temporal”, respectively exchangeable in this paper.
The purpose of this paper is to develop a reactive power theory that will aid in the analysis, design, control, optimization, and operation of complex power systems. Our theory seeks to consolidate existing reactive power theories while also addressing AC and DC power, AC and DC hybrid circuits, and power converters with AC on one side and DC on the other. To achieve this, we have developed a spacetime reactive power theory and tested it in various scenarios to answer many of the above fundamental questions. Our new approach treats today’s complex AC and DC power systems as a multi-dimensional spacetime fabric of node voltages and loop currents and defines active and reactive power and their components from the standpoint of spacetime physics and mathematical theorems. The new spacetime (both spatial and temporal) reactive power theory not only unifies all the existing reactive power theories into a grand reactive power theory, but also solves their limitations and provides unprecedented new information and insight for system analysis, design, control, optimization, and operation.
Spacetime pq theory
Space-average (or spatial) active, reactive, and apparent powers and power factor angle at a single instant of time
Figure 2 shows the circuitry of a complex AC and/or DC power system illustrated in Fig. 1, where there are m sources and m loads connected through m lines. In such a power system, each source-load may be AC or DC, maybe with a different frequency and/or magnitude from their neighbors. For generality, the m number of source voltages and load currents can be expressed in the form of a m-dimensional space vector, i.e., v = [v1, v2, …, vm], and i = [i1, i2, …, im]. We use the bold-face font to represent a vector (v, i) and lowercase letters to express their instantaneous values at a single time instant (τ) over a time interval, [(t-T), t] that is under consideration, i.e., vj = vj(τ) and ij = ij(τ), where j = 1, 2, …, m, and τ \(\:\in\:[\left(t-T\right),\:t]\). Therefore, it is a traveling time interval and T is the net period under consideration. Figure 2 further illustrates the spatiotemporal relationship of the voltage and current vectors in the (m x n)-dimensional space-time, or (m x n) events.
This general expression is valid for an m-phase AC system, an m-source DC system, and/or a combination (or hybrid) of AC and DC systems in the space (or spatial) dimension and an n-instant (point, or event) in the time (or temporal) dimension. Once again, we emphasize that all different types of sources/loads are treated in the same manner. Therefore, the theory developed here is valid for all power systems, which will become clear in examples and explanations provided in the later sections.
The total instantaneous active (or average per dimension) power of an m-dimensional space system illustrated in Fig. 1, p (or p/m), is a scalar given by the dot product of the voltage and current vectors as follows:
The physical meaning of p represents the total instantaneous active power delivered from the sources to the loads at a given time instant (τ ) for an m-source and m-load power system, which is consistent with the traditional definition and meanings.
Hereby, we define newly the instantaneous reactive power of an m-dimensional system, q, as the cross product of the voltage and current vectors, given by the following equation:
It should be noted that m can be any integer that is greater than zero (0) for both active and reactive power definitions—Equations (1) and (2). More importantly, we have expanded the traditional cross product definition for 2- and 3-dimension vectors to any (m > 3)-dimension vectors. For example, when only considering one single load, single bus, single terminal, single source, or single subsystem as a whole in a single phase system for its active and reactive powers, then we have m = 1 and \(\:p=\left({v}_{1}\:{i}_{1}\right)\) and \(\:\varvec{q}\:=\:\left[\:0\:\right]\), where q is a zero (0)-dimension or singular vector with zero value. When only considering one single load, single bus, single terminal, single source, or single subsystem as a whole in a three-phase system for its active and reactive powers, then we have m=3 and \(\:p=\left({v}_{1}\:{i}_{1}+{v}_{2}\:{i}_{2}+{v}_{3}\:{i}_{3}\right)\) and \(\:\varvec{q}\:=\:\left[\left({v}_{1}{i}_{2}-{v}_{2}{i}_{1}\right),\:\left({v}_{1}{i}_{3}-{v}_{3}{i}_{1}\right),\:\left({v}_{2}{i}_{3}-{v}_{3}{i}_{2}\right)\right]\), where q is a three (3)-dimension (or three-component) vector. Note that we treat a three-phase load, three-phase bus, three-phase terminal, three-phase source, or three-phase subsystem as a 3-dimension system in our active and reactive power definitions. Therefore, a small power grid’s dimension, m can easily be over 10,000 when considering all of its loads, sources, buses, etc. For any m-dimension system, the instantaneous reactive power, q, is a vector that has \(\:{C}_{m}^{2}\) or m(m-1)/2 number of components, each component has two terms: (+) and (-), which is expressed as qjk = vjk x ijk\(\:,\:\) where 1\(\:\le\:\) j<k \(\:\le\:\)m. The total number of terms thus is m(m-1). The physical meaning of each reactive power (q) component represents the cross-power circulation \(\:\left({v}_{j}{i}_{k}-{v}_{k}{i}_{j}\right)\) between two different (jth and kth) voltages and currents, or in a more precise mathematical term, the area of the parallelogram formed by the voltage and current vectors that are projected to the (j-k) plane. Figure 3 shows an illustration to help visualize the cross-product of two m-dimension vectors and the physical meanings/ relationships of the space active and reactive power and current. Their more detailed physical meanings will be explained and explored throughout the following sections. Since the active power, p is a scalar given by the dot product of the voltage and current vectors as Eq. (1), we further define the voltage vector magnitude (v), current vector magnitude (i), reactive power magnitude (q), apparent power (s), power factor (pf) and power factor angle (φ), the active current vector (ip), and the reactive current vector (iq) for an m-dimension power system, in accordance with the traditional definitions as follows:
Note that we use regular fonts for scalar values such as a vector’s magnitude. We further define the space root-mean-square (rms) value of an m-dimensional power system’s voltage and current vectors as follows:
The above space rms values respectively represent the average “per-source (or node) voltage and per-load (or branch) current” of the voltage and current vectors at a single instant of time for an m-dimensional power system. These average effective values of each dimension, i.e., each source (or node) voltage and load (or branch) current, are thus equivalent to their traditional well-known time rms values. Therefore, the space rms value is dual to the traditional time-dimensional rms value. The duality and relationship between space and time will become much clearer in later sections. Note that we use uppercase letters to represent average values, while using lowercase letters for instantaneous values as mentioned before.
[Spacetime pq Theorem 1: Pythagorean Spatial pq Theorem]
The space active power, reactive power, and apparent power (p, q, and s) at any time instant satisfy the Pythagorean relationship as follows:
Additionally, the active current, ip, and reactive current, iq satisfy the Pythagorean theorem as well, that is,
This space pq theorem follows the Pythagorean relationship between active and reactive powers and currents, and thus, we call it the Pythagorean spatial pq theorem. It provides us the following properties: (1) given the source voltages and instantaneous active power that must be transmitted from the sources to the loads, the smallest current (or the minimum current magnitude) happens only when the reactive power q = 0; (2) a current vector can be decomposed into two components: active current, ip, and reactive current, iq; (3) the traditional Pythagorean relationship of the active current/power and reactive current/power with power factor angle (φ) holds true; and (4) given a voltage vector, v, any current vector along the lateral surface of the m-dimension cone in Fig. 3 will produce the same amount of active power, p and the same magnitude of reactive power, q. The theorem also implies that no energy storage is needed when using power converters to compensate for the space reactive current, iq, or space reactive power, q, because \(\:\varvec{v}\cdot\:{\varvec{i}}_{q}=0,\) while keeping the total active power unchanged. The mathematical proof of this pq theorem is given in Appendix 1.

An AC and DC power system’s circuitry expressed in an m-dimensional space at a single instant of time (top), and its mathematical space & time expressions of vectors over a considered time interval, (t−T, t] with n temporal instants (bottom).

Mathematical relationship and visualization of the cross product, qjk = vjk x ijk component, voltage vector, current vector, active power/current, reactive power/current, and power factor angle. (Note: an m-dimension vector can be expressed as either an (m x 1) or (1 x m) matrix. Both forms are simply a transpose operation of each other. Their use is merely for convenience and both preserve the same physical meanings and mathematical properties.)
Time-dimension (temporal) active, reactive, and apparent power and power factor angle at a single point (source or node voltage—load or branch current) of the space
Consider a single spatial point (or the jth source/node voltage and its load/branch current) of the m-dimensional space power system. The active power, pj=pj(τ) = vj(τ)ij(τ) at the jth source-load point with voltage, vj = vj(τ), and current, ij = ij(τ), may fluctuate over a moving time interval, [(t-T), t] that is under consideration. T can be as short as a switching cycle (in microseconds) of a power converter system (for example, when our interest is to examine the active and reactive power during switching operations), a half or full fundamental cycle (in milliseconds) of an AC system, charging-discharging cycle (in hours) of a battery energy storage system, or a diurnal cycle of a PV/wind power system. Thus, we define Pj = Pj(τ) as its time-dimension average power over the time interval, [(t-T), t] as follows:
We can map/transform the temporal points into a spatial vector to represent the voltage and current, respectively as follows:
According to the above space pq definitions, we obtain the time-dimension average active and reactive power as follows:
[Spacetime pq Theorem 2: Nyquist-Shannon Temporal pq Theorem]
If the maximum considered or interested ripple/fluctuation frequency of the active power, pj over a considered (or interested) time interval, [(t-T), t] is given as (F), the spatiotemporal mapping/transformation becomes a finite number of points (n) that holds true to the energy conservation principle with neither energy nor information loss when n satisfies that n\(\:\:\ge\:\:\)2FT. That is,
where n is a finite number that must satisfy n\(\:\:\ge\:\:2\)FT. This pq theorem follows the Nyquist-Shannon sampling theorem. Thus, we call it the Nyquist-Shannon temporal pq theorem.
The Nyquist-Shannon temporal pq theorem tells us the duality, conservation of energy, mapping-ability and extractability between space and time, providing the following implications and physical meanings: (1) temporal power/energy/signal/information can be mapped into space, preserved in space, and extracted from space and vice versa—spatial power/energy/signal/information can be mapped into the temporal sequence at a single spatial point, preserved and extracted from that point; (2) a finite mutual mapping between a finite time interval and a finite spatial point is possible; (3) temporal power/energy/signal/information can be decomposed into two perpendicular (or orthogonal) components with the Pythagorean relationship, similar to spatial ones; and (4) the temporal reactive power can be mapped to the present space and extracted with no time delay. Several examples in the next section: "Real Applications, Imagined Cases, and Thought Experiments", particularly in its first three sub-sections, will demonstrate these properties.
According to the above Nyquist-Shannon pq theorem, we can map two space vectors’ perpendicular relationship to two perpendicular time functions as follows:
Given two space vectors as shown in Eq. (8), we can map them respectively to a time function over a time interval of \(\:[\left(t-T\right),\:t]\), that is, voltage, vj = vj(τ), current, ij = ij(τ), and τ \(\:\in\:[\left(t-T\right),\:t]\), which is equivalent to the following power or energy at a single source/load point, j, as follows:
where, ij−p and ij−q are temporally perpendicular to each other, and ij−p is in parallel with vj and ij−q perpendicular to vj over the time interval τ \(\:\in\:[\left(t-T\right),\:t]\). That is,
As a result, Pj and Qj are temporally perpendicular to each other and their Pythagorean relationship holds true. This temporal perpendicularity can be easily seen and proved from the temporal rms values as follows:
Spacetime (or spatiotemporal) active, reactive, and apparent power and power factor angle of the m-dimensional space over n-dimensional time
Now consider a power system with an m-dimensional space over a time interval of [(t-T), t]. According to the Nyquist-Shannon temporal pq theorem, the time interval can be mapped to a finite n-dimensional spacetime. As a result, the power system becomes an (m x n)-dimensional spacetime as follows:
Figure 2 illustrates this (m x n)-dimensional spacetime. The spacetime active and reactive power of the power system can now be obtained by combining Eqs. (1) − (6) and (7) − (14) according to the dot and cross products of the voltage and current matrices as follows:
where 1\(\:\le\:\) j < k \(\:\le\:\)m, and 1\(\:\le\:\) a < b \(\:\le\:\)n. The above spacetime definitions simply are the combination of the previously defined m-dimensional space and n-dimensional time interval, which hold true according to both pq theorems as the third spacetime pq theorem as follows:
where qs and qt are the m-dimension space reactive power and n-dimension time reactive power, iP and iQ are the spacetime active and reactive current components that are respectively correspondent to the spacetime active and reactive powers. The above equations look complicated and cumbersome to understand; however, they possess all the straightforward pq properties and insightful and rich information about the system. In the next section, we will show real applications, imagined cases, and thought exercises/experiments/cases to better understand their meanings and significance.
Real applications, imagined cases, and thought experiments
Single-phase AC systems
Let us first apply the spacetime pq theory to a simple and classic single phase AC system to verify its validity and consistency with the existing definitions and more importantly its new features and properties. Assuming that both the source voltage, v1, and load current, i1, have no distortion, we have the following equations,
Thus, the single-phase AC power is fluctuating with 2ω (or 2f) frequency. Consequentially, we choose our considered time interval as \(\:T=1/\left(2f\right)\), because of p1’s only one fluctuation frequency of 2ω (or 2f). Further we see that the maximum fluctuation frequency is \(\:F=2f\). Therefore, we obtain that \(\:n\ge\:2\), and thus we select \(\:n=2\) to map the above time-instant voltage, current, and power to space as follows:
Thus, we obtain the following spacetime average active and reactive power from Eqs. (11) and (12), and their active and reactive current components from Eq. (3) or Eqs. (16) and (17):
The above exercise clearly shows the validity and consistency of the spacetime pq theory with the traditional time-average reactive power theory. Moreover, the new spacetime pq theory has the instantaneous space feature to extract active and reactive current and power information accurately and without any time delay. That is, we know all the current and past power information instantaneously by looking into the space.
Next, we provide a real-world application involving a single-phase AC system case. In the early 1980s, harmonic current in nonlinear loads became a significant issue for utility companies and users, which were well-investigated and documented in studies, reports and even films. These harmonic currents generated from single phase electronic loads such as computers and appliances, caused many office-building fires by overheating of shared neutral conductors in three-phase systems. In addition, some large industrial nonlinear loads were even more problematic, leading to harmonic resonances in power grids and 10-Hz voltage flicker—which caused visual alpha-band (10-Hz) flicker of incandescent and florescent lights to neighboring consumers. For instance, an industrial arc furnace was one of the largest single-phase nonlinear loads with significant fundamental reactive current, and 2nd & 3rd harmonic current components fluctuating rapidly at around 10 Hz. The industry tried to solve this problem from many different technology angles with little successes. We had an opportunity working with Toshiba on their 80 MVar power converter based reactive power compensator (or today’s so-called STATCOM) to mitigate the voltage flickering caused by arc furnaces, which resulted in light flickering (i.e., alpha-band 10-Hz flicker) in neighboring residential homes. The main challenge at the time was that the traditional algorithm for extracting reactive current/power signals relied on analog filters for signal processing to separate the fundamental current signal (both the magnitude and phase angle) from the highly distorted arc furnace current, which was primarily composed of the 2nd and 3rd harmonics. These filters introduced large time delays (e.g., a 2nd -order LPF with 75-Hz cutoff frequency to separate the 50-Hz fundamental from the 3rd -harmonic or 150-Hz would cause 60° phase shift), rendering the compensation ineffective. We tried the instantaneous pq theory at the time3; however, it proved futile since the theory was based on a special-case three-phase three-wire system, and it suggested there was no instantaneous reactive power in single-phase systems. Then, we applied our initial spacetime pq idea to this case and obtained a big success, which is summarized as follows:
Consider that the source voltage is almost sinusoidal, i.e., \(\:{v}_{1}={V}_{1}\text{s}\text{i}\text{n}\left(2\pi\:ft\right)\), and the load current is highly distorted with the 3rd harmonic, \(\:{i}_{1}={I}_{1}\text{sin}\left(2\pi\:ft-{\varphi\:}_{1}\right)+{I}_{3}\text{sin}\left(6\pi\:ft-{\varphi\:}_{3}\right),\:\) then we have
which includes two fluctuation components at frequencies 2ω and 4ω, respectively. Thus, we choose the minimum n = 4 for \(\:T=1/\left(2f\right)\), \(\:F=4f\), and \(\:n\ge\:2F\)·T = 4. When we map the above voltage, current, and power into space, we obtain
\(\begin{aligned} & {\varvec{Q}}_{1} ={\varvec{v}}_{1}\times\:{\varvec{i}}_{1}=[\left({v}_{11}{i}_{12}-{v}_{12}{i}_{11}\right),\:\left({v}_{11}{i}_{13}-{v}_{13}{i}_{11}\right), \\ & \left({v}_{11}{i}_{14}-{v}_{14}{i}_{11}\right),\:\left({v}_{12}{i}_{13}-{v}_{13}{i}_{12}\right),\:\left({v}_{12}{i}_{14}-{v}_{14}{i}_{12}\right),\:\left({v}_{13}{i}_{14}-{v}_{14}{i}_{13}\right)]\end{aligned}\) and
Finally, we have
We have obtained the reactive current component without using any signal processing filters that would inevitably cause time delay, thus making compensation more effective. This was an unprecedented result we obtained from a real application of the spacetime pq theory.
3-phase 4-wire AC systems
The instantaneous reactive power theory3 is for a three-phase (m = 3) three-wire AC power system (voltage v1, v2, v3, and current i1, i2, i3) that has no zero-sequence voltages (i.e., \(\:{v}_{1}+{v}_{2}+{v}_{3}=0\)) and/or no zero-sequence currents (\(\:{i}_{1}+{i}_{2}+{i}_{3}=0\)). When transforming 3-phase (a, b, and c) voltages and currents to 2-phase (α and β) variables, one must assume both the sum of 3-phase voltages and the sum of 3-phase currents equal to zero to avoid losing information. Therefore, the original instantaneous reactive power theory does not work when a zero-sequence component exists in the voltage and/or current. To address this limitation, we developed a generalized instantaneous reactive power theory to accommodate three-phase four-wire AC power systems, where zero-sequences exist4. In4, we examined the commonly used 3-phase 4-wire AC systems for commercial office buildings and stores, where many electronic devices/appliances and computers were used. These electronic loads—using diode rectifiers at the front end—draw a large 3rd harmonic current by each phase. Instead of canceling out in the neutral, these 3rd harmonic currents add up, which resulted in a zero-sequence current—that is larger than the phase current—flowing through the neutral wire and consequentially overheated the cable and caused many building fires. Here, we explain how the spacetime pq theory can be applied to this 3-phase 4-wire case to detect the reactive current and power instantaneously and without using any signal processing filters, which was implemented in4 for effective compensation. Clearly, a 3-phase AC system with or without zero-sequence components is just one special case of our new spacetime pq theory. Let us only focus on the mentioned 3rd harmonic current to see how to extract it with our new spacetime pq theory. Assume that
\(\:{i}_{1}={I}_{1}\text{sin}\left(2\pi\:ft-{\varphi\:}_{1}\right)+{I}_{3}\text{sin}\left(6\pi\:ft-{\varphi\:}_{3}\right),\text{ }\)\(\:{i}_{2}={I}_{1}\text{sin}\left(2\pi\:ft-{\varphi\:}_{1}-\frac{2\pi\:}{3}\right)+{I}_{3}\text{sin}\left(6\pi\:ft-{\varphi\:}_{3}\right)\), \(\:{i}_{3}={I}_{1}\text{sin}\left(2\pi\:ft-{\varphi\:}_{1}-\frac{4\pi\:}{3}\right)+{I}_{3}\text{sin}\left(6\pi\:ft-{\varphi\:}_{3}\right)\), where \(\:{v}_{1}+{v}_{2}+{v}_{3}=0\), and \(\:{i}_{1}+{i}_{2}+{i}_{3}=3{I}_{3}\text{sin}\left(6\pi\:ft-{\varphi\:}_{3}\right)\ne\:0\).
Then from Eqs. (1) and (2) we have.
\(\:p={v}_{1}{i}_{1}+{v}_{2}{i}_{2}+{v}_{3}{i}_{3}=\frac{3}{2}V{I}_{1}\text{cos}\left({\varphi\:}_{1}\right)\), and
,
.
Finally from Eq. (3), we can calculate and obtain the active and reactive current as follows:
Again, we have extracted the reactive current component instantly without any time delay, thus making compensation effective. This unprecedented result was obtained from a real demonstration of the spacetime pq theory, as described in4.
Simple DC systems
As mentioned in the Abstract, the traditional reactive power concept has never been applied to DC power systems. There is no reactive power in DC power systems according to the existing reactive power theories. Do DC power systems really have no reactive power? To answer this question, let us first consider a simple DC system that has one DC source of 200 V (vd = 200 V constant) and one pulse DC load with 50% duty cycle as shown in Fig. 4. For example, such a DC load can be a DC chopper that is switching at 1 kHz with 50% duty cycle, feeding a 10-Ω resistor. As a result, the current, id is a 1-kHz (0-A and 20-A) pulse with 50% duty cycle as shown in the figure. Another example is an EV charger that operates at nights and idles during the day with 50% duty cycle, i.e., a diurnal cycle of 24 h, which has a much longer time interval than the DC chopper case. For the DC chopper case, the switching period (1 ms) should be the interested time interval or period (i.e., T in Eqs. (7)–(26)) for investigation, whereas for the charger case the charging and idling period (24 h) is considered as the time interval. Regardless of the considered time intervals, the reactive current and power can be calculated in the same fashion as follows:
-
Source voltage rms value: Vd = 200 V, Source current rms value: Id = 14.14 A;
-
Active current: Id−p = 10 A; reactive current: Id−q = 10 A.
-
Active power: P = 2000 W; Reactive power: Q = 2000 Var;
-
Apparent power: S = 28,284 VA; power factor: pf = 0.707.
Again, these values are consistent with our general understanding of active and reactive power because the active current (10 A) is the minimum value to deliver 2000 W power from a 200-V constant DC source to a load. However, this type of load (the DC chopper or the charger) that consumes 2000 W actually draws 14.14-A current from the source, which is much larger than the minimum value and thus results in some reactive power in the system. This reactive power can be compensated locally near the power electronic load, which would result in the minimum power generation/transmission/ delivery requirements from the source to the load.

A DC source feeds a DC chopper or an EV charger and its current waveform.
Single- and multi-phase DC converter systems
The above subsection clearly shows that reactive power does exist in a simple DC power system according to the spacetime pq theory, which increases power generation/transmission/delivery requirements for every stage of equipment and should be and can be minimized just like the traditional AC power systems.
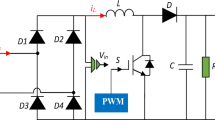
What about active devices like power converters and inverters? Do they generate or consume reactive power? Single- and multi-phase (or interleaved) DC-DC converter systems are widely used in today’s power electronics. Let us use them as examples to examine more complicated DC systems to answer these questions. For example, a DC-DC boost converter (Fig. 5) is commonly used to boost battery voltage in most EVs/HEVs and renewable energy sources. Here, we assume that the battery voltage, vb is constant 200 V (over an interested or considered time interval). The converter is operated at 50% duty cycle (i.e., boost to 400 V) with a switching period of 100 µs, the high voltage side has a large capacitor, C to produce an almost constant voltage. The current drawn from the battery, ib as shown in Fig. 5 has a 50-A average and 30-A triangular wave ripple, i.e., ib = 50 + 30 tri(t/T) [A]. For this case, we can choose the switching period as the time interval, T, for calculating rms values and powers. Using the spacetime pq theory, we obtain the following interesting values:
-
Battery voltage and current rms values: Vb = 200 V, Ib = 52.92 A;
-
Active current: Ib−p = 50 A; reactive current: Ib−q = 17.32 A.
-
Active power: P = 10,000 W; reactive power: Q = 3464 Var;
-
Apparent power: S = 10,583 VA; power factor: pf = 0.9449.
From the above-calculated values, the active current from the battery is the average value, i.e., 50 A, and the reactive current is the ripple current, i.e., the triangular wave of −30 A to + 30 A, whose rms value is 17.32 A. Therefore, the active power is 10,000 W, which is calculated from the active current, and the reactive power is 3464 Var calculated from the reactive current. These values are logical and understandable because only the active current contributes to the average power delivered from the battery. The reactive current has no contribution to the average power delivery. The reactive current only produces fluctuation power (pq(t)) between the battery and the converter (the average value of pq(t) over one period is zero). It makes the rms current greater than the active current (50 A), which is the minimum value for delivering the 10,000-W power from the 200-V battery. From the source’s (or battery’s) standpoint, the reactive current creates power losses in the battery and cable because of their internal resistances; thus this additional reactive power burden should be minimized by reducing the current ripple, which is the reactive current.

DC-DC boost converter and its input current waveform.
Let us further examine another interesting case: a 2-phase (interleaved) DC-DC converter system as shown in Fig. 6, where the 2-phase legs are interleaved together through two inductors. Each phase leg is operated exactly like the above single-phase converter but with a T/2 phase shift from each other. As a result, the total load current, ib, is 100 A constant. Thus, there is no reactive power or current from the battery, vb, according to the spacetime pq theory. This is consistent with the traditional reactive power theory. However, if we look inside the 2-phase DC-DC converter and treat each phase leg as an individual load, reactive power appears as follows according to the spacetime pq theory:
v = [v1, v2] = [vb, vb] = [200, 200] [V], and i = [i1, i2] = [50 + 30 tri(τ/T), 50 − 30 tri(τ/T)] [A]. Thus, we have \(\:p={v}_{1}{i}_{1}+{v}_{2}{i}_{2}=20,000\:\left[\text{W}\right]\), \(\:\varvec{q}=\left[\left({v}_{1}{i}_{2}-{v}_{2}{i}_{1}\right)\right]=-12,000\:\text{t}\text{r}\text{i}(\tau\:/T)\) [VAr], and ip = [i1p, i2p] = [50, 50] [A] and iq = [i1q, i2q] = [30 tri(τ/T), −30 tri(τ/T)] [A].
This reactive power or current circulates between the two phases among the inductors, which is very interesting and insightful. The 2-phase DC-DC chopper legs effectively eliminate the reactive power/current—that otherwise would and must be supplied from the battery—by circulating it between its two-phase legs. This clearly reduces stress onto the battery at the price of using a converter with 2-phase legs and two inductors, which makes sound engineering sense.

2-phase DC-DC boost converter and its input current waveforms.
AC and DC hybrid systems
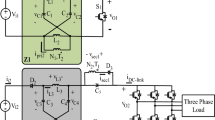
Now, let us examine a 3-phase AC and 1-phase DC hybrid power system as shown in Fig. 7a, to answer the most intriguing question raised in the Abstract: “what about AC and DC hybrid power systems?”, which has never been addressed before. In this system, the 3-phase AC subsystem provides 500 MW of power through a 500-kV high voltage AC (HVAC) transmission line to Microgrid A, which includes local wind power generation, while the 1-phase DC subsystem provides an equal amount of 500 MW of power through a 500-kV HVDC transmission line to Microgrid B, which includes local solar power generation. Therefore, we have a 4-dimension space with four voltages, v = [v1, v2, v3, v4], \(\:{v}_{1}={v}_{ac}\text{sin}\left({\omega\:}_{1}t\right)\), \(\:{v}_{2}={v}_{ac}\text{sin}\left({\omega\:}_{1}t-\frac{2\pi\:}{3}\right)\), \(\:{v}_{3}={v}_{ac}\text{sin}\left({\omega\:}_{1}t-\frac{4\pi\:}{3}\right),\:\text{w}\text{h}\text{e}\text{r}\text{e}\:{v}_{ac}=500\sqrt{2}/\sqrt{3}\:\left[\text{k}\text{V}\right]\) and \(\:{v}_{4}={v}_{dc}=500\:\left[\text{k}\text{V}\right]\), and four currents, i = [i1, i2, i3, i4]. Assume that the 3-phase AC currents are \(\:{i}_{1}={i}_{ac}\text{sin}\left({\omega\:}_{1}t-\varphi\:\right)\), \(\:{i}_{2}={i}_{ac}\text{sin}\left({\omega\:}_{1}t-\frac{2\pi\:}{3}-\varphi\:\right)\), \(\:{i}_{3}={i}_{ac}\text{sin}\left({\omega\:}_{1}t-\frac{4\pi\:}{3}-\varphi\:\right)\), where their amplitude is fluctuating at a low frequency ω0 (for example, 0.060 Hz = 60 mHz) due to the local loads and wind power generation as \(\:{i}_{ac}=\sqrt{\frac{2}{3}}\left(1+\text{sin}\left({\omega\:}_{0}t\right)\right)/\text{cos}\left(\varphi\:\right)\:\:\left[\text{k}\text{A}\right]\), and the DC current is fluctuating complementarily at the same low frequency due to its local loads and solar power generation as \(\:{i}_{4}={i}_{dc}=\left(1-\text{sin}\left({\omega\:}_{0}t\right)\right)\:\left[\text{k}\text{A}\right]\). According to the spacetime pq theory, we can calculate the p and q, and ip and iq from its voltage and current vectors as follows:
and
where
-
i.
\(\:{v}_{1}{i}_{2}-{v}_{2}{i}_{1}=\frac{{v}_{ac}{i}_{ac}}{2}\left[-\sqrt{3}\text{sin}\left(\varphi\:\right)\right]\)
-
ii.
\(\:{v}_{1}{i}_{3}-{v}_{3}{i}_{1}=\frac{{v}_{ac}{i}_{ac}}{2}\left[\sqrt{3}\text{sin}\left(\varphi\:\right)\right]\)
-
iii.
\(\:{v}_{2}{i}_{3}-{v}_{3}{i}_{2}=\frac{{v}_{ac}{i}_{ac}}{2}\left[-\sqrt{3}\text{sin}\left(\varphi\:\right)\right]\)
-
iv.
\(\:{v}_{1}{i}_{4}-{v}_{4}{i}_{1}={v}_{ac}[\text{sin}\left({\omega\:}_{1}t\right)\left(1-\text{sin}\left({\omega\:}_{0}t\right)\right)-\sqrt{\frac{3}{2}}{i}_{ac}\text{sin}\left({\omega\:}_{1}t-\varphi\:\right)]\)
-
v.
\(\begin{aligned} {v}_{2}{i}_{4}-{v}_{4}{i}_{2}={v}_{ac}[\text{sin}\left({\omega\:}_{1}t-\frac{2\pi\:}{3}\right)\left(1-\text{sin}\left({\omega\:}_{0}t\right)\right) -\sqrt{\frac{3}{2}}{i}_{ac}\text{sin}\left({\omega\:}_{1}t-\frac{2\pi\:}{3}-\varphi\:\right)]\end{aligned}\)
-
vi.
\(\begin{aligned} {v}_{3}{i}_{4}-{v}_{4}{i}_{3}={v}_{ac}[\text{sin}\left({\omega\:}_{1}t-\frac{4\pi\:}{3}\right)\left(1-\text{sin}\left({\omega\:}_{0}t\right)\right) -\sqrt{\frac{3}{2}}{i}_{ac}\text{sin}\left({\omega\:}_{1}t-\frac{4\pi\:}{3}-\varphi\:\right)],\end{aligned}\)
and
ip = [i1p, i2p, i3p, i4p] = \(\:\left[\frac{\sqrt{2}}{\sqrt{3}}\text{sin}\left({\omega\:}_{1}t\right),\:\frac{\sqrt{2}}{\sqrt{3}}\text{sin}\left({\omega\:}_{1}t-\frac{2\pi\:}{3}\right),\frac{\sqrt{2}}{\sqrt{3}}\text{sin}\left({\omega\:}_{1}t-\frac{4\pi\:}{3}\right),\:1\right] \; \text{[kA]}, \;\; \text{and}\)
Let us examine the above calculations and results to understand their meanings. Microgrid A or the 3-phase AC system is delivering an average of 500 MW active power with a power factor of cos(φ) and low frequency (ω0) fluctuation, i.e., pAC = p1 + 2+3 =500 \(\:\left(1+\text{sin}\left({\omega\:}_{0}t\right)\right)\) [MW]. Microgrid B or the 1-phase DC system is delivering an average of 500 MW active power with a low frequency (ω0) fluctuation, i.e., pDC = p4 = 500 \(\:\left(1-\text{sin}\left({\omega\:}_{0}t\right)\right)\) [MW]. The total active power required by both the AC and DC microgrids is p = p1 + 2+3+4 =pAC + pDC = 1000 MW. However, the peak power rating for the AC system is 500 \(\:\left(1+\text{sin}\left({\omega\:}_{0}t\right)\right)/\)cos(φ) = 1000/cos(φ) = 1155 MVA at a power factor of pf = cos(φ) = 0.866, which means the entire AC system including the AC source/generation, the AC transmission line from Point a to Point b, and the AC distribution system all have to be rated at 1155 MVA to deliver the average power of 500 MW. Similarly, the peak power rating for the DC system is 1000 MW to deliver an average power of 500 MW. Apparently, a large reactive power, q = 1291 MVar, is circulating between the AC and DC subsystems.
There are two parts to the system’s spatial reactive power: (1) one part that circulates among the three phases within the AC subsystem and (2) the second part between the AC and DC subsystems. That is, the first part circulating among the 3-phase AC subsystem with q1 + 2+3 = 578 MVAr at ω1 = 60 Hz, and the second part that circulates between the total 3-phase AC subsystem and 1-phase DC subsystem is q4 = 500 MVAr at ω0 = 60 mHz.
According to the spacetime pq theory, this circulating reactive power can be instantaneously compensated with a power inverter or power converter (the blue dashed box) as shown in Fig. 7a. In theory, no energy storage is needed in this reactive power compensation if the switching frequency of the converter is infinitely high. Given that the power converter is switching at practical frequency of 60 kHz, and thus the required energy storage in the inductors and the capacitor are very small, only (60 kHz)/(60 mHz) = 1 millionth of the required energy storage is needed compared with the case if the AC and DC subsystems are separately and individually compensated for the 60 mHz reactive power components. Furthermore, after the compensation for both the 60-Hz AC reactive power (the 60-Hz q value) and the 60-mHz DC reactive power (the 60-mHz q value), this compensator that theoretically requires zero energy storage makes both the HVAC and HVDC transmission lines deliver only the minimum and constant active power of 500 MW with no reactive power. Moreover, if we examine inside the compensator and increase the switching frequency to infinity, then the required inductance and capacitance become infinitesimal. We can calculate and compare the reactive power circulating inside the compensator for any practical switching frequency other than 60 kHz. In this thought exercise, we have dealt with three different levels (or scales) of spacetime pq values: the 60-Hz AC, the 60 mHz DC-fluctuation, and 60 kHz switching frequency pq values, respectively. Through power electronics and the spacetime pq theory, we have successfully transformed low frequency (60 mHz and 60 Hz) reactive power that needs large energy storage to very high frequency (60 kHz) reactive power that only needs very small energy storage. The usefulness, insight gained, and application potential of the spacetime pq theory are evident.
More importantly, the above analysis and result can be used to explain the space reactive current and power phenomenon in a more general physical aspect. The space reactive power phenomenon can happen without being directly related to “time”, and it exists instantaneously in “space” in both AC and DC power systems regardless of time scales and frequencies. A power converter with theoretically no energy storage components can generate space reactive current and power3. Figure 7b provides a visualization of the space reactive power using a power converter/inverter that consists of switching devices and very small energy storage capacitor on the DC side to circulate reactive power between the load and inverter for a simple three-phase AC power system. A three-phase AC power system is simply a special case of an m-dimension system according to our developed spacetime pq theory, in which the three-phase load is viewed/treated as an AC power system that has three sources and three loads. As a result, the load’s space reactive current/power can be compensated by a power converter/inverter with theoretically zero DC capacitance. That is, if we could increase the switching frequency to infinity, then the required DC capacitance becomes infinitesimal. Moreover, our developed spacetime pq theory can be used for not only the above explained and illustrated reactive current/power compensation but also for much broader applications, such as transforming a power grid into a resistive network/system and making the entire power grid resistive or like a network of resistors that exhibit no energy storage elements and produce no spatial reactive power in the grid as proposed in18.

(a) A 3-phase AC and 1-phase DC hybrid power system and a spacetime reactive power compensator (in blue dashed box). (b) A visualization of the space reactive power using a power converter/inverter that consists of switching devices and very small energy storage capacitor on the DC side.
Broader applications to today’s power and energy grids
Single-source with multi-load situations
The spacetime pq theory is defined on an m-dimensional space—that is, m-dimensional space voltage and m-dimensional space current vectors, respectively, over a under-considered time interval, T. One question is how to make such an m-dimensional spacetime when one single source feeds multiple loads. Another question is what are the benefits we gain from looking into individual loads fed by the same voltage and why not just lump the multiple loads together as one single load? The 2-phase DC-DC converter example (Fig. 6) described in Section "Single- and Multi-Phase DC Converter Systems" has already provided partial answers to those questions. Let us formally formulate such situations by examining a typical distribution system feeding residential loads, as shown in Fig. 8. For example, Phase a (a single source) feeds four houses’ air-conditioning (A/C) loads. We could sum all four loads together, treat them as a single load, and examine the lump-sum p and q. However, that would not be able to see the interaction among—or possible reactive power circulating among—the four A/C loads. In order to examine the reactive power among the four loads, we simply make the source four-dimensional as va = [va1, va2, va3, va4] = [va, va, va, va] to match its current ia = [ia1, ia2, ia3, ia4]. Then, we have.
and

A distribution system feeding residential A/C loads.
We assume that each A/C load is on/off-controlled with 25% duty cycle over a time interval of T (for example, T = a half hour) and show two extreme cases of the four house A/C loads in Fig. 8. In Case A, the four loads are evenly spread out over T, whereas all the four loads are switched on and off simultaneously in Case B (that is, all on for interval [0, T/4] and all off for the rest of the interval). To make it simpler, we consider the spatial and temporal pq separately, focus on the voltage and current amplitudes, Va and Ia, and ignore the phase angle difference between the voltage and current. According to the spatial and temporal pq definitions given respectively in the "Spacetime pq Theory" section, we have the following spatial and temporal pq values:
For Case A:
\(\:{P}_{a}={p}_{a}={V}_{a}{I}_{a}\) (constant);
For Case B:
\(\:{p}_{a}={4V}_{a}{I}_{a}\) x (25% duty pulse);
The above results indicate implicitly an interesting insight: that spatial reactive power, \(\:{q}_{a\_s}=\sqrt{3}{V}_{a}{I}_{a}\) helps reduce active power fluctuation by circulating power among the loads. When the spatial reactive power or the circulating power,\(\:\:{q}_{a\_s}\) is maximized, the total active power fluctuation (or the time reactive power) becomes the minimum (or \(\:{q}_{a\_t}=0)\), that is the Case (A). However, when the spatial reactive power is zero or no space reactive power (\(\:{q}_{a\_s}=0)\) among the loads, the total active power fluctuation or the time reactive power (\(\:{q}_{a\_t}=\sqrt{3}{V}_{a}{I}_{a}\)) becomes the maximum, that is Case (B). Remember that the spatial apparent power, \(\:{s}_{a\_s}=\sqrt{{p}_{a}^{2}+{q}_{a\_s}^{2}}=2{V}_{a}{I}_{a}\) remains invariant or constant for both cases and/or any in-between cases once the source voltage and active power over the considered time interval T are given according to the Pythagorean theorem. Because the apparent spatial power only depends on the rms values of the voltage and current, it makes sense that the active and reactive spatial powers complement each other and one more time we have shown that space reactive power and time reactive power are mutually transformable, mapping-able, and information preserved according to the energy conservation principle.
For this single-source multi-load situation, we could further examine its temporal reactive power by looking into the phase difference of the 60 Hz AC source voltage and load currents. Since we have examined many cases dealing with temporal reactive power in the above sections, its detailed examination is omitted. However, it is noteworthy to point out that space and time reactive power follows the Pythagorean theorem that has the perpendicular relationship as \(\:{q}_{a}=\sqrt{{q}_{a\_s}^{2}+{q}_{a\_t}^{2}}\), thus spatial and temporal reactive powers can be dealt with independently or together depending on one’s analytical purpose.
An m-dimensional spacetime power and energy system
Today’s power and energy grid consists of conventional generation, HV AC & DC transmission, medium voltage (MV) AC & DC distribution, and micro-grids with local renewable generation as shown in Fig. 9. Therefore, there are a multitude of bus (or node) voltages and load (or loop) currents, which literally form an m-dimensional spacetime fabric. Naturally, such a power & energy grid can be mathematically represented with mn-dimensional spacetime voltage and current vectors. Imaginably, the spacetime pq theory can help overall system analysis, optimization, and operation from the above real application examples and thought exercises/experiments. Given that a power grid consists of thousands of transmission line buses and millions of distribution buses and loads, the dimensions become astronomical and the spacetime fabric massive. In addition, the traditional active and reactive power—that is simply based on each node’s individual time-average values—reveals no information about the instantaneous interaction and circulation power among the buses, lines and loads. It is a great feature and advantage that spacetime reactive power with mn(mn-1) number of reactive power components holds all the information about the grid rather than the total active power alone. Therefore, the spacetime pq theory is a much-needed theory and a powerful analytical tool for large systems, especially for today’s AC and DC hybrid renewable energy power grids. We have already seen from the above-exemplified cases and examples, and we will further explore it in the following sections.

A typical power grid of power generation, HV AC & DC transmission, and MV AC & DC distribution systems.
Analysis, optimization, and operation examples
Analyzing, optimizing, and operating a large power grid is daunting. Let us introduce some small examples to show how to use the spacetime pq theory for system analysis, optimization, and operation. Figure 10 shows a local subsystem, in which four buses and four lines form a meshed local transmission network. If the bus voltages are respectively shifted by π/2 clockwise in phase angles, then a large loop current would circulate among the buses. The spacetime pq analysis expressed in the box shows a net-zero active power, though, while the loop current, iL, contributes solely to the reactive power looping around the buses. This example shows any loop current will appear in its local reactive power components, whereas its active power tells nothing about the loop current problem. Furthermore, the six reactive power components within the four buses and lines detail all the reactive power information among these buses and lines, not only their magnitudes but also their directions—remember that reactive power, q, is a vector. A simple analysis of reactive power components among local buses and lines can help us understand its operation and its loop-current problem. Such system analysis can reveal all loop currents and other fluctuation/oscillation problems when looking into the entire system’s reactive power components.

A local meshed transmission network and its spacetime pq analysis.
Now, let us examine how to use the pq theory for system optimization. Figure 11 shows a system with two sources and two loads (i.e., m = 2) and its detailed calculation for their temporal and spatial active and reactive currents/powers. Both sources have the same voltage amplitude, v1 = v2 = vS and both loads have the same current amplitude, IL. However, the load currents are T/2 time-shifted, that is, i1 = {1 − sgn[sin(2π t /T)]} IL/2 and i2 = {1 + sgn[sin(2π t /T)]} IL/2, which results in a maximum spatial reactive current that is a square waveform with an amplitude of ± IL, that is, i1 − r = −i2 − r = ir−12/m = −sgn[sin(2π t /T)] IL/2. This spatial reactive current circulates between the two loads all the way through the two sources as in Fig. 11(a). However, when we group the sources and loads together locally and respectively as in Fig. 11(b), the spatial reactive current, ir−12, would circulate between the two local loads, which results in a constant net load current, ( i1 + i2 ) = IL from the sources, iS = IL. For the system configuration of Fig. 11(a), the circulating spatial reactive current creates extra power losses along the delivery lines and increases the power ratings of the delivery lines and equipment. Therefore, the two loads should be grouped together locally as Fig. 11(b) to allow space reactive power to circulate among themselves, minimizing the power rating requirements of the upstream delivery lines and associated equipment. Note that the load current fluctuation period, T, or frequency, 1/T, is irrelevant to the spatial reactive current/power amplitude. T can be as short as microseconds in pulse loads (such as power converters) or as long as minutes, for example, in residential loads.

A 2-source 2-load system with (a) spatial reactive current circulating around the entire space instantaneously; (b) circulating locally between the loads; (c) The current waveforms; and detailed calculation for their temporal and spatial active and reactive currents/powers as following: v1 = v2 = vS, i1={1 − sgn[sin(2πt/T)]}·IL/2, i2={1 + sgn[sin(2πt/T)]}·IL/2; Temporal active and reactive current/power of each load: P1 = vS·IL/2, i1_p= IL/2, Q1 = vS·IL/2, i1_q = − sgn[sin(2πt/T)]·IL/2; P2 = vS·IL/2, i2_p=IL/2, Q2 = vS·IL/2, i2_q= sgn[sin(2πt/T)]·IL/2; Spatial active and reactive current/power between the two loads: v = [v1, v2], i = [i1, i2], m = 2; Space rms values of the voltage and current vectors: v=|v|=\(\:\sqrt{m}\)·vS=\(\:\sqrt{2}\)vS, i=|i|=IL; Per-dimension voltage and current: VS_rms=v /\(\:\sqrt{m}\)=vs; IS_rms=i /\(\:\sqrt{m}\) =IL/2. p = v·i=v1i1+v2i2=vS(i1+ i2)=vs·IL, q =v×i=[(v1i2−v2i1)]=[vS(i2−i1)]=vS·sgn[sin(2πt/T)]·IL, ip=[IL/2, IL/2]=[1, 1]·IL/2, iq=[− 1, 1]·sgn[sin(2πt/T)]·IL/2; Spatial reactive current, iq is the reactive current that circulates between the two loads as illustrated as ir−12 = i1q−i2q = − sgn[sin(2πt/T)]·IL.
The above 2-source, 2-load system can be extended to another example as shown in Fig. 12, where a battery energy storage system (BESS) is used respectively at the source and load ends to shorten their respective spatial reactive current/power path by circulating their reactive currents locally. In this case, the PV source period is a day (24 h) while the load period could be much shorter. Regardless of their periods, their respective spatial reactive currents/powers are locally compensated, thus reducing required ratings for the lines and associated equipment to the minimum to deliver the active current/power generated by the source and/or demanded by the load. This simple system is obvious and straightforward, and may not need any spacetime pq analysis. However, when a grid is large and complex, a comprehensive pq analysis will become necessary for operation and control in real time and for design and optimization in system planning.

Spatial reactive currents compensated locally by local BESS.
Regarding system operation and control, Fig. 13 serves as an example to further demonstrate that the spacetime pq theory is a vital and powerful analytical tool. In Fig. 13, there are two microgrids, each with its own BESSs and its own local operation and control. If each microgrid is operated according to its own active power needs and local voltage and current information without sharing any pq information with its neighbor, they could have a charging and discharging operation of their BESS like the shown waveforms, resulting in a large spatial reactive power circulating between the two micro-grids. Clearly, such BESS operations that are hidden within the micro-grids provide no benefits to the overall system except wasteful power losses. The traditional reactive power analysis will not reveal such BESS operation at all. However, when looking into the spatial reactive power between the two micro-grids, the problem is revealed and can be avoided altogether. Therefore, the spatial reactive power, q provides insightful information for system operation and control. Without the spatial reactive power information, each micro-grid would be blinded to its detrimental operation if only the active power and traditional reactive power are monitored.

Two micro-grids, each with BESS operated independently without sharing information with each other. Active power information alone has very limited aid to operation. A spatial reactive power analysis can reveal their potential optimum operations.
Hard-won insights, remarks, and more questions
Duality, interchangeability and mapping-ability between space and time
Spacetime pq theorem 2—the Nyquist-Shannon temporal pq theorem—reveals an interesting and powerful property about the duality, interchangeability and mapping-ability between space and time pq power information. This theorem can be applied to a single node, a subsystem, and an entire system depending on one’s interests and purposes. According to the theorem, a system’s full temporal information can be mapped into a finite n-dimensional space with n\(\:\:\ge\:\:\)2FT. When the considered time interval, T and highest frequency, F are high, the dimension of the mapped space, n can become large and massive, which is natural because large space (inertia) and long time interval are closely related. However, the theorem provides the minimum mapping requirements of the dimension, n. We have demonstrated in Section "Single-Phase AC Systems" of "Real Applications, Imagined Cases, and Thought Experiments" that we could extract the fundamental reactive power and all the 2nd and 3rd harmonics with 4 sampling data in half fundamental cycle with no time delay nor distortion, which is unprecedented and impossible for the traditional reactive power theory that needs signal processing filters.
Parallelity and perpendicularity of voltage and current vectors
From the two spacetime pq theorems and their applications, we can deduce the parallelity and perpendicularity of spacetime. For m-dimensional voltage and current vectors, the current vector has two component vectors: ip that is in parallel with the voltage vector, and iq that is perpendicular with the voltage. Physical interpretation tells us that resistors always draw a current that is in parallel with the voltage, whereas reactive components, such as inductors and capacitors (and other energy storage devices like batteries), produce currents perpendicular to their voltage. Therefore, power grids with inductors, capacitors, batteries, and/or any energy storage devices will inevitably produce spacetime reactive power, which may cause resonances, oscillations, instability, or energy fluctuations and circulations if not properly controlled and operated. We have also demonstrated that nonlinear loads and active switching devices like power electronics can produce spacetime reactive power, sometimes as side products/effects in some cases and sometimes as powerful compensation technology to minimize reactive power circulation. In addition, we can conjecture that all currents would be in parallel with their voltages in a power grid that only consists of resistive components: i.e., resistive transmission lines and cables, resistive transformers, and resistive loads if such things ever exist. For a resistive network or system, the current is always in parallel with the voltage and no spacetime reactive power exists. An ultimate proposal to transform power grids into purely resistive systems has been proposed in18. We speculate that the proposed resistive transformation with the spacetime pq theory will change how we design, optimize, operate, and control power grids. This proposal has provided a general direction, however, generated many more questions for us to answer in future follow-up research.
Remarks
We have observed many interesting points in this paper, which are summarized as follows:
-
1.
The spacetime pq theory does not distinguish whether a power system is AC, DC, or hybrid system, and provides an equally insightful theoretical base for all of these systems.
-
2.
Space (or spatial) reactive current and reactive power are the part of instantaneous current and power that circulates among subsystems and components at a given instant of (τ). In other words, the reactive power phenomenon can happen without being directly related to “average power over a time period”, and it can happen in “space” between two loads in an instantaneous fashion. Theoretically, no energy storage is needed for a power electronics circuit to generate and/or compensate space reactive current and power.
-
3.
Time reactive current and power are power fluctuations over a considered time-interval between subsystems or between sources and loads. They can be translated to instantaneous space reactive power and treated in the dual fashion to space.
-
4.
In DC power circuits and systems that contain ripples or fluctuations, there are reactive current and reactive power just like AC circuits. Likewise, reactive current/power in DC circuits should be dealt with in the same fashion as in AC systems.
-
5.
An appropriately considered time interval, T should be determined according to the purpose of system analysis when using the spacetime pq theory. The spacetime pq theory does not specify any specific T values, which can be different in individual subsystems.
-
6.
In a linear DC circuit with ideal constant DC sources and constant loads over a considered time interval, passive components (L and C) are neither needed nor do they generate/consume any reactive voltage/current/power because an inductor with constant current or a capacitor with constant voltage has a constant energy stored, which results in zero power flow-in or -out. However, no such ideal constant DC systems practically exist, and passive components (L, C, and battery) are needed in DC circuits precisely because we use them to reduce ripples/fluctuations in voltages, currents, and powers over a considered period. Any passive components will generate/consume reactive current/power when ripples/fluctuations exist (in a broader sense, ripples/fluctuations are a kind of “AC” components). However, if our considered or interested time interval/period is longer than their power-on/off periods, an ideal DC source/load would have reactive power because of the on/off operation according to our spacetime pq theory. This broader definition of reactive power has been verified in Figs. 11 and 12, and 13, which is very useful for system design, control, operation and optimization. Therefore, a battery or a battery energy storage system (BESS) is a reactive power source when considering their full charging and discharging cycles (which can be minutes or hours). Thus, a battery is NOT an energy source or an active power source in a long-term sense; it is just an energy storage device like an inductor or capacitor but with larger energy capacity.
-
7.
Active power and reactive power follow the Pythagorean Theorem in both space and time domains, and the energy conservation principle holds true in both domains. Time-domain power information can be mapped into space-domain and vice versa.
Conclusions
In this paper, we have developed a spacetime pq theory for both AC and DC power systems. This spacetime pq theory consolidates the traditional and existing reactive power theories. The general definitions of reactive current and reactive power hold true for both time-domain and space-domain reactive currents/powers with two important theorems for both AC and DC power systems, and they are consistent with the traditional reactive power theories.
More importantly, the developed spacetime pq theory can address many situations that the traditional power theories could not and provide powerful insights and information for system design, optimization, operation, and control. It is expected that the theory will become a much-needed theory and powerful analytical tool for today’s hybrid grids that consist of AC and DC systems with ever-increasing renewable energy penetration. This paper has provided a few examples as a starting point of how to use the spacetime pq theory when considering future power/energy systems and power electronics, especially their designs, optimizations, controls and operations.
Data availability
Availability of Data and Materials: The datasets used and/or analyzed during the current study available from the corresponding author on reasonable request.
References
Budeanu, C. I. Reactive and fictitious powers. (Inst. Romain de I’Energie, 1927) (in Romanian).
Fryze, S. Active, reactive, and apparent power in non-sinusoidal systems. Przeglad Elektrot. 7, 193–203 (1931) (in Polish).
Akagi, H., Kanazawa, Y. & Nabae, A. Instantaneous reactive power compensators comprising switching devices without energy storage components. IEEE Trans. Ind. Appl. IA-20, 625–631 (1984).
Peng, F. Z. & Lai, J. S. Generalized instantaneous reactive power theory for three-phase power systems. IEEE Trans. Instrum. Meas. 45(1), 293–297 (1996).
Tolbert, L. M. & Habetler, T. G. Comparison of time-based non-active power definitions for active filtering. In IEEE International Power Electronics Congress, October 15–19, Acapulco, Mexico, 73–79 (2000).
Tolbert, L. M., Xu, Y., Peng, F. Z. & Chiasson, J. N. Definitions for non-periodic current compensation. In European Conference on Power Electronics and Applications, Toulouse, France (2003).
Czarnecki, L. S. Non-periodic currents: their properties, identification and compensation fundamentals. In IEEE Power Engineering Society Summer Meeting, Seattle, Washington, July 15–20, 971–976 (2000).
Czarnecki, L. S. On some misinterpretations of the instantaneous reactive power p-q theory. IEEE Trans. Power Electron. 19, 828–836 (2004).
Shepherd, W. & Zakikhani, P. Suggested definition of reactive power for nonsinusoidal systems. Proc. IEE 119(9), 1361–1362. https://doi.org/10.1049/piee.1973.0173 (1972).
Czarnecki, L. S. What is wrong with the Budeanu concept of reactive and distortion power and why it should be abandoned. IEEE Trans. Instrum. Meas. IM–36(3), 834–837. https://doi.org/10.1109/TIM.1987.6312797 (1987).
Ferrero, A. & Superti-Furga, G. A new approach to the definition of power components in three-phase systems under nonsinusoidal conditions. IEEE Trans. Instrum. Meas. 40, 568–577 (1991).
ETEP. First International Workshop on Power Definitions and Measurements under Nonsinusoidal Conditions, no. 1, (1991).
Cristaldi, L. & Ferrero, A. Harmonic power flow analysis for the measurement of the electric power quality. IEEE Trans. Instrum. Meas. 44(3) (1995).
Salmerón, P. & Montaño, J. C. Instantaneous power components in polyphase systems under nonsinusoidal conditions. Proc. Inst. Elect. Eng. Sci. Meas. Technol. 143(2), 151–155 (1996).
Herrera, R. S. & Salmerón, P. Instantaneous reactive power theory: a reference in the nonlinear loads compensation. IEEE Trans. Ind. Electron. 56(6) (2009).
Nos, O. V., Dudin, A. & Petzoldt, J. The instantaneous power quaternion of the three-phase electric circuit with linear load. In 2016 17th International Conference of Young Specialists on Micro/Nanotechnologies and Electron Devices (EDM), Erlagol, Russia, 526–531 https://doi.org/10.1109/EDM.2016.7538792 (2016).
Brasil, V. P., Ishihara, J. Y. & Ferreira Filho, A. D. L. Investigating power factor definitions in the context of unbalanced loads and voltages. IEEE Trans. Power Deliv. 39(4), (2024)
Peng, F. Z. Impedance sources (Z sources) with inherent fault protection for resilient and fire-free electricity grids. Sci. Rep. https://doi.org/10.1038/s41598-024-53452-y (2024).
Acknowledgements
We would like to thank Dr. Bokang Zhou, Dr. Jinli Zhu, and Dr. Jeonghun Kim for their help in drawing figures and typing/verifying equations. We are grateful for the opportunity given by Prof. A. Nabae and Prof. H. Akagi in the mid-1980s to work on Toshiba’s 80 MVar reactive power compensator, which sparked our spacetime reactive power research. This material is based upon work partially supported by the U.S. Department of Energy’s Office of Energy Efficiency and Renewable Energy (EERE) under the Solar Energy Technologies Office Award Numbers DE-EE0009340 (PI: F. Z. Peng) and DE-EE0010427 (PI: Y. Li) during 2020–2024.
Author information
Authors and Affiliations
Contributions
FZP wrote the main manuscript and YL prepared Figs. 1, 2 and 3, proved Pythagorean pq theorem, and prepared Appendix 1. All authors reviewed and commented/corrected the manuscript.
Corresponding author
Ethics declarations
Competing interests
The authors declare no competing interests.
Additional information
Publisher’s note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Electronic supplementary material
Below is the link to the electronic supplementary material.
Rights and permissions
Open Access This article is licensed under a Creative Commons Attribution-NonCommercial-NoDerivatives 4.0 International License, which permits any non-commercial use, sharing, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons licence, and indicate if you modified the licensed material. You do not have permission under this licence to share adapted material derived from this article or parts of it. The images or other third party material in this article are included in the article’s Creative Commons licence, unless indicated otherwise in a credit line to the material. If material is not included in the article’s Creative Commons licence and your intended use is not permitted by statutory regulation or exceeds the permitted use, you will need to obtain permission directly from the copyright holder. To view a copy of this licence, visit http://creativecommons.org/licenses/by-nc-nd/4.0/.
About this article

Cite this article
Peng, F.Z., Huang, H., Tolbert, L.M. et al. Spacetime pq theory for AC and DC electric power systems. Sci Rep 15, 8169 (2025). https://doi.org/10.1038/s41598-025-90021-3
Received:
Accepted:
Published:
Version of record:
DOI: https://doi.org/10.1038/s41598-025-90021-3
