
Abstract
An effective fault detection strategy has always been the focus of smart grid system research. Fast and accurate fault detection is the basis for complex systems to maintain reliability and security. However, traditional fault detection methods often ignore the interpretability of the model while pursuing high detection accuracy. Complex models can usually provide higher detection accuracy, but often lack transparency and interpretability, making it difficult for operators to understand and trust the detection results of the model. Therefore, a new fault detection strategy based on an adaptive interpretable belief rule base (AI-BRB) is proposed. This method considers the adaptive updating of the search domain of the model accuracy to achieve the balance and optimization between the two conflicting objectives of the model interpretability and the detection accuracy. The fault detection model based on AI-BRB considers the interpretability of modeling, inference and optimization processes. In the optimization process, interpretability constraints are added to maintain the interpretability of the optimized model. In addition, in order to avoid falling into the local optimal solution in the optimization process, the search domain is updated adaptively according to the accuracy of the model, which improves the interpretability and robustness of the fault detection model. Finally, an example is given to prove that the proposed method can improve the accuracy of fault detection and the interpretability of the model compared with the existing methods.
Similar content being viewed by others


Introduction
In recent years, the smart grid has become a research hotspot. With the increasing complexity and functionality of the smart grid’s working environment, its security and reliability have become more fragile and prone to failures. As a branch of multi-agent systems, smart grid also meets the characteristics of multi-agent systems1,2,3,4,5,6,7,8,9,10,11. Considering that generators in the smart grid interact with each other, when a generator fails, the output of the faulty generator may be biased, potentially affecting the neighboring generators or even the entire system. Therefore, studying fault detection in the smart grid is of great significance.
Many scholars have conducted a lot of research on fault detection of smart grid. Souhe et al.12 proposed a robust sensor fault detection and isolation scheme by detecting, classifying and locating smart grid faults through sensors. Alonso et al.13 pointed out that sensors have an essential role in protecting smart grids and improving network energy efficiency. Therefore, a new type of intelligent sensor was proposed. Bhaskar Patnaik et al.14 proposed a differential method for microgrid fault detection and classification by combining machine learning models to achieve potential fault detection and classification. A fault detection method based on wavelet transform is proposed for distributing generator fault detection15,16,17. Zhoutian Yan et al.18 used topological analysis and other methods to improve the level of hidden fault identification in the sampling section of relay protection simulation. Asma Belhadi et al.19 utilized reinforcement learning and blockchain technology to detect failures in distributed and heterogeneous energy environments. Jie Li et al.20 utilized deep learning networks to detect faults in hybrid smart grids. Olufemi A. Omitaomu et al.21 provided an overview of the technologies currently applied to the problems of smart grids and power systems. Muhammad Kashif Sattar et al.22 used an Arduino-based fault detection system to replace the traditional relay for transformer detection. Chetan Khadse et al.23 used feature extraction and Bayesian regularization neural network training to achieve fault detection and location. Monideepa Paul et al.24 proposed a fault indication algorithm based on impedance. Kandasamy M et al.25 used deep learning network and blockchain technology to realize fault detection of smart grid. Li et al.26 proposed a cloud-based collaborative smart grid fault detection system. Akbari et al.27 proposed a novel technique for reducing fault location time through component reliability.
Jiang et al.28 proposed an approach for fault detection, identification, and location in smart grid (SG) systems, combining matching pursuit decomposition (MPD), hidden Markov models (HMM), and fault contour maps generated by machine learning algorithms to diagnose faults under various system conditions with different signal-to-noise ratios.
It can be seen from the above that most of the existing fault detection schemes of smart grids are data-driven based on large sample populations. However, due to the opaque modeling process, the rationality of the results from data-driven models may not be convincing. Therefore, the existing fault detection still lacks an effective detection scheme, which mainly has the following two problems: First, the model accuracy cannot be guaranteed under small sample data. In practical fault detection applications, it is difficult to obtain a large number of smart grids fault samples. Second, the inherent opacity of these models undermines the credibility of their results. Due to the limitations of traditional smart grid fault detection methods, we need better methods to ensure its stability and safety. For example, issues such as insufficient interpretability, accuracy, false positives and false negatives exist. Consequently, additional investigations are essential for addressing the challenges of limited interpretability, while also maintaining the focus on reducing elevated false positive and false negative rates.
The Belief Rule Base (BRB) model, introduced by Yang et al.29, is a representative grey-box model extensively implemented in numerous areas such as fault detection, safety evaluation, aerospace, medicine, and more. It effectively utilizes engineering experience and expertise, incorporating small sample monitoring data and exhibiting ample modeling capabilities. Additionally, BRB’s high accuracy and interpretability make it suitable for fault detection in smart grids. By employing expert knowledge, the model’s initial parameters are established (essentially creating an expert system), while training samples serve to optimize model parameters. Furthermore, the BRB model demonstrates strong performance in small sample size instances.
To address the challenges of inadequate observation information and intricate systems in real-life scenarios, Feng et al.30 introduced a security evaluation model based on the belief rule base of attribute reliability. He et al.31 suggested an interval-constructed belief rule base, capable of resolving classification and decision-making issues associated with complex systems. Additionally, Han et al.32 developed an interpretable lithium-ion battery health assessment model (BRB-I). Hu et al.33 proposed a new solution to unbalanced multi-classification problems by using hierarchical belief rule base and limit gradient feature selection method. Cao et al.34 proposed a BRB robustness analysis method and five guiding principles for constructing BRB.
Throughout the current research, most existing BRB-based fault detection methods do not consider explainability in the optimization process, and the inherent randomness of optimization algorithms may reduce the explainability of BRB models35. Secondly, the optimized BRB confidence distribution is inconsistent with the actual results of fault detection, which reduces the interpretability of the model. Moreover, the above BRB-based optimization algorithms often rely on fixed search domains, which makes the algorithms easy to fall into local optimal solutions and difficult to find global optimal solutions, thus limiting the robustness and interpretability of the model. These shortcomings are especially prominent in the application of complex systems such as smart grids, which affects the practical application effect of the model. To address these issues, a new interpretable intelligent grid fault detection method AI-BRB that integrates multi source information has been proposed. Employing a novel optimization technique founded on the Projection Covariance Matrix Adaptive Evolution Strategy (P-CMA-ES) algorithm with interpretability constraints and an adjustable search domain, the AI-BRB model maintains the interpretability of the optimized model. This approach facilitates the adaptive modification of the search space, bolstering the algorithm’s performance and robustness.
The main contributions of this paper are as follows:
-
(1)
An interpretable adaptive architecture (AI-BRB) is proposed to synthesize the interpretable model in the process of building and optimizing.
-
(2)
A modified P-CMA-ES algorithm with interpretability constraints is introduced for optimizing the fault detection model’s parameters. This adaptation guarantees that the model’s interpretability remains intact following the optimization process.
-
(3)
In order to solve the defect of fixed search domain algorithm, an adaptive search domain is proposed, which improves the interpretability and robustness of the algorithm.
This paper is organized as follows: “Preliminary and problem description” outlines the AI-BRB-based fault detection model for smart grids and addresses the challenges encountered during system modeling, offering a comprehensive solution. Section “Construction of fault detection model” defines and elaborates on the creation process of the fault detection model. Section “Controller design and inference process of AI-BRB model” delves into the design and the reasoning process of the model’s controller. Section “The interpretability optimization of AI-BRB” provides an in-depth explanation of the AI-BRB model’s reasoning, the interpretability of optimization and the adaptive updating of the AI-BRB model, and “Case study” verifies the method in this paper through specific experimental research, and gives experimental conclusions. Section “Conclusions” summarizes the full text.
Preliminary and problem description
Preliminary
In this paper, a directed graph G(V, E, A) with a node set \(V=\{1,\ldots ,N\}\), an edge set \(E \subseteq V \times V\) and an adjacency matrix \(A=[a_{ij}]_{N \times N}\) is used to describe the connection of the smart grids with N generators and a virtual leader, where N generators are denoted as node \(1,\ldots ,N\).
If \(e_{ij}=(i,j) \in E\) holds, then (i, j) is an edge of the directed graph. Therefore, i is defined as the parent node of this edge or node j, and node j is the child of this edge or node i. The set of neighbor nodes of node i is denoted by \(N_i=\{j \in V |(i,j) \in V \}\). The element \(a_{ij}\) in the adjacency matrix \(A=[ a_{ij} ]_{N\times N}\) is defined as: for any \(i,j \in V\), if node i can get information from a set \(N_i\) of neighbors, i. e. \(j \in N_i\), then \(a_{ij}=1\); otherwise \(a_{ij}=0\). The laplacian matrix of a graph G is denoted by \(L = D - A\), where \(D=diag\{d_1,d_2,...,d_N\}\) is the in-degree moment matrix, and \(d_i=\sum _{j \in N_i}a_i\). \(B=diag\{b_1,b_2,...,b_N\}\) is denoted as the leader-following adjacency matrix of the system, when the ith node is connected to the virtual leader through the communication network, \(b_i>0\), if not, \(b_i=0\). Denote the parameter matrix as \(H = L + B\).
Problem formulation
In constructing a fault detection model for smart grid systems, the construction, inference, and optimization processes all impact the detection accuracy and interpretability. Addressing the following three concerns is necessary when constructing a smart grids fault detection model based on AI-BRB:
Problem 1
How to ensure the reasoning process remains interpretable.
The interpretability of the modeling process ensures that the model can accurately describe the uncertain information in an understandable way. At the same time, the rationality of the inference process and cause and effect among the inputs and outputs should be fully considered so that the inference process is also interpretable.
Here, a function \(f(*)\) is constructed to represent the inference process:
where \(f(*)\) represents the inference function, x represents the fault index set, \(\alpha\) is the parameter set of the inference process, and y represents the output utility value of BRB, which is the inference result.
Problem 2
How to ensure the interpretability of the optimization process.
Owing to the intricate structure of large-scale smart grid systems, experts may not entirely comprehend its operational information. To guarantee the fault detection process’s precision, an optimization algorithm must adjust the initial fault detection model, which is constructed using limited expert knowledge. The conventional P-CMA-ES optimization algorithm may, to some extent, compromise the model’s interpretability, potentially leading to a loss of the original physical significance of the parameters. To address this issue, interpretability constraints should be incorporated into the optimization algorithm. This process is expressed as the function \(g(*)\).
where \(\gamma\) is the constraint of the optimization algorithm and \(\beta\) is the set of parameters for the algorithm.
Problem 3
How to solve the problem that the BRB model may fall into the local optimal solution during optimization.
If the search domain is fixed, the current optimal solution cannot be searched in a larger range during the search process, and the algorithm may eventually fall into the local optimal solution and fail to reach the global optimal solution. To avoid the above problems, it is necessary to adopt flexible policies to adjust the size of the search domain.
The accuracy of the fault detection results of the model is fed back to the establishment of the next search domain, and the function to solve the above problems will be set as \(SD(*)\)
where output is the feedback value of the fault detection result.
Construction of fault detection model
This section mainly introduces the construction of the fault detection model for smart grids based on AI-BRB. Subsection 3.1 describes the smart grid model, Subsection 3.2 introduces the specific reasoning process of the AI-BRB model. The implementation process of integrated fault detection based on AI-BRB is shown in Fig. 1.

The implementation process of the integrated fault detection method based on AI-BRB model.
Model of smart grid
Consider a smart grids with N synchronous generators. The dynamical model of the ith generator with fault can be described as follows:
where \(\phi _i = ( \phi _i^{act} - \phi ^{nom})/\phi ^{nom}\), for \(i=1,2,...,N\), \(\phi _i\) represents the deviation of the actual speed \(\phi _i^{act}\) of the ith generator relative to the rated speed \(\phi ^{nom}\) under the synchronous rotation reference, unit rad/s; \(\varphi _i = \varphi _i^{o} - \varphi _{i0}\), \(\varphi _i^{o}\) and \(\varphi _{i0}\) are the actual rotor power angle and initial rotor power angle of the i generator, respectively, unit rad; \(M_i\) and \(Q_i\) denote the inertia constant and damping coefficient of the ith generator, respectively, unit S; and \(\rho _i\) is the fault signal, and when there is no fault in generator i, \(\rho _i = 0\); otherwise,\(\rho _i \ne 0\); \(T_{a,i}\) is the acceleration power rate of the ith generator, \(T_{a,i} = T_{m,i} - T_{e,i}\), \(T_{m,i}\) and \(T_{e,i}\) represent the mechanical input power and the electromagnetic output power, respectively,let’s say it’s per unit,\(T_{e,i}\) is expressed as:
where \(G_{ik} = G_{ki}\) represents the equivalent conductance between generator i and generator k, \(B_{ik} = B_{ki}\) represents the equivalent susceptance, which are all standard unitary values.
Denote \(f_i = (-Q_i\phi _i)/M_i + (T_{m,i} - T_{e,i})/M_i\) as a nonlinear term of the generator system, Eq. (6) can be reformulated as:
Definition 1
For the generator, if the following conditions are met,
then, we can say that this smart grids system achieves consensus.
AI-BRB based fault detection model construction
The input attributes of the AI-BRB-based fault detection model set on the generator i can be described as:
In the fault detection model, take generator i, \(i \in \{1, 2,...,N\}\) as an example, the k rule of the AI-BRB model is expressed as:
where \(\varGamma _p (P = 1,2,...,M_k)\) represents the attribute of BRB, and \(A_i^k\) represents the referential value of the m attribute in the k rule. \(\beta _{n,k} (n = 1, 2, . . . , N, k = 1, . . . , L)\) represents the belief degree corresponding to each consequent under the k th belief rule, \(D_i(i = 1,2,...,N)\) represents the N fault detection results of the AI-BRB model. If \(\sum _{n=1}^{N} \beta _{n,k} =1\), the k rule is considered complete. \(\theta _k\) denotes the rule weight of rule k with respect to the importance of other rules. \(\delta _i\) indicates the importance of the first premise attribute (fault detection index) compared with other attributes. L is the total number of rules, and \(M_k\) is the number of prerequisite attributes. \(C_1,C_2,...,C_P\) means that there are p interpretable constraints in the rule base. The parameters \(\beta _{N,k}\), \(\theta _k\) and \(\delta _i\) are initially preset by experts, and then optimized based on the data. Additionally, during the optimization process, these parameters are subject to \(C_1,C_2,...,C_P\) constraints.
Controller design and inference process of AI-BRB model
Controller design
To regulate the mechanical input power of the synchronous generator, the distributed adaptive controller is designed as :
where \(\zeta _i = z_{i2} + 2z_{i1} (i = 1, 2,..., N)\) ; \(\chi _i\) is a nonlinear function to be determined; let \(\gamma _i \ge 1\) denote an arbitrary nondecreasing function, and \(\zeta _i^{\frac{1}{4}} (\zeta _i^2) \ge \max \{ \chi _i(\zeta _i), |\zeta _i|^3 \}\) can be satisfied; \(\hat{\theta _i}\) is an estimate of the unknown constant \(\theta _i\), \(c_i\) is an arbitrary constant. \(z_1\) and \(z_2\) are the relative power angle and relative speed between the i generator and its neighbor generator respectively. \(a_{ij}\) represents the communication weight between generator i and generator j; all generators can obtain the virtual leader generator information. \(b_i\) is the contact weight between the i generator and the virtual leader generator. Similar controller can be found in36, and the inference process of controller is omitted since it is similar to36 and not the focus of this study.
Inference of the AI-BRB model
Expert knowledge acquired from smart grids is a crucial factor in enhancing model interpretability. The BRB model comprises three key components: knowledge base, reasoning machine and optimization method. The model’s specific inference process is described below.
Step 1
Calculate the matching degree between the input sample and the reference value, which represents the matching degree of the rule. Its calculation formula is as follows:
where \(A_{i,r}\) is the R reference level of input \(x_i\), R is the number of reference levels, and reference level \(A_{i,r}\) also corresponds to \(A_i^k\) in Eq. (10), that is, \(A_i^k \in {A_{i,r}, r=1,2,...,R}\). \(A_{i,r}\) and \(A_{i,r+1}\) are the r and \((r+1)\) reference values of the i attribute reference level.
Step 2
The weights are activated, and the active weights of the rule are as follows:
Step 3
The reasoning process is applied to the ER algorithm to obtain the belief degree of the final fault detection result. The following are its calculation rules:
where R represents the number of activation rules.
Step 4
The output is described in confidence form as:
The utility of the output can be expressed as follows:
The interpretability optimization of AI-BRB
In this section, “The interpretability of reasoning” introduces the explainability of AI-BRB reasoning process, Subsection “The interpretability of optimization” introduces the explainability of AI-BRB model optimization, “Adaptive updating of the search domain” introduces the adaptive updating of AI-BRB model search domain, and finally “Optimization of the AI-BRB model” introduces the steps of AI-BRB model optimization.
The interpretability of reasoning
AI-BRB model uses the ER algorithm as inference engine, the inference process is both clear and transparent, and the handling of uncertain information is well-explained. Taking Eq. (17) as an example, it can be divided into the following three parts:
where, \(\omega _k \beta _{n,k}\), the activation weight acts on the confidence of the activation rule, which reflects the influence of the input information on the later part of the rule, \(\omega _k \beta _{n,k}\) represents the basic probability mass (BPM) of the nth output level \(D_n\) in the k confidence rule. \(1 -\omega _k \sum _{i=1}^{N} \beta _{i,k}\)represents BPM for set \(D=\{D_1,D_2,...,D_N\}\), which is not separately assigned to any of the output result levels, also known as residual support. \({1 - \omega _k}\) is caused by rule activation weights, which are related to input information, rule weights, attribute weights, and so on. The ER algorithm guarantees the evidence combination process’s traceability through rigorous probabilistic reasoning, with the outcome maintaining interpretability in the form of belief distribution. As a result, the ER algorithm has gained recognition for its interpretability features, including transparency, reliability, and traceability of output results.
The interpretability of optimization
In this research, Cao et al.37 established eight general interpretability criteria for BRB, as depicted in Fig. 2. Consequently, this offers a theoretical foundation for the development of the AI-BRB model. The interpretability constraints for optimization include:

General interpretability criteria for AI-BRB.
Belief rules elucidate the input-output relationship in a fault detection system and represent the primary interpretable element of BRB. These rules enable the conversion of expert knowledge into parameters that can be integrated into the model, resulting in rational and reliable detection outcomes. Nonetheless, due to the inherent randomness of optimization algorithms, the model can generate numerous inaccurate rules. For instance, Table 138 presents rule 28 for pipeline leak detection. When the ’negative small (NVS) and positive maximum (PL)’ conditions are met, the confidence levels for “leak size zero” and “leak size very high” are 0.53 and 0.33, respectively. This distribution of confidence levels is implausible and unreasonable. A reasonable confidence distribution should not lead to high confidence in contradictory results. Therefore, it is necessary to add interpretable constraints in the process of model optimization to ensure that the belief rules generated by the model are reasonable and realistic. These constraints can be incorporated into optimization algorithms to ensure that the model produces only valid and meaningful rules. For example, constraints can be based on expert knowledge or domain-specific rules to ensure that the level of confidence assigned to conditions and conclusions is reasonable and logical. By incorporating these interpretable constraints, the BRB model can produce accurate, reliable, and interpretable fault detection results that are easy for experts to understand and trust.
Constraint operation 1: Ensure that the model parameters retain their original physical meaning. Compared to black-box models such as back-propagation neural networks (BPNN) and support vector machines (SVM), the BRB model has physical parameters that make users more trusting of the model. However, during the parameter optimization process of the BRB model, the physical meaning of these parameters may be lost, leading to inconsistencies between the model results and the actual problems, which in turn affects user trust. For example, if the initial rule weight is set to 0.92, but during optimization the weight is adjusted to 0.004, this signifies a significant reduction in the importance of the rule, which can adversely impact the model’s performance. Therefore, it is crucial to ensure that the key parameters of the BRB model maintain practical physical significance and are effectively utilized throughout the optimization process. To address this issue, the parameters of the BRB model are constrained as follows:
where, \(\beta _{lp}\), \(\theta _{lp}\), and \(\delta _{lp}\) are the lower bounds for the confidence \(\beta (t)_{n,k}\), rule weight \(\theta (t)_k\), and attribute weight \(\delta (t)_i\), respectively. Similarly, \(\beta _{up}\), \(\theta _{up}\), and \(\delta _{up}\) are the upper bounds for the confidence \(\beta (t)_{n,k}\), rule weight \(\theta (t)_k\), and attribute weight \(\delta (t)_i\), respectively. Through these constraints, we can effectively prevent unreasonable changes in the parameters during the optimization process, ensuring that the BRB model achieves better predictive performance and higher trustworthiness while maintaining its physical interpretability.
Constraint operation 2: To ensure that the optimized confidence distribution aligns with the actual fault detection results in smart grids, it is necessary to guarantee that the belief distribution curve for each rule is monotonic or convex. This means that the confidence distribution should accurately reflect the fault detection performance of the smart grid, ensuring that the model’s output is consistent with the real-world outcomes. To achieve this, the following constraints are implemented:
where \(Con_k\) indicates the interpretable constraint on the belief distribution under the k rule. There is no uniform fixed form for the interpretability constraint of the belief distribution, which is usually determined by expert knowledge.
Adaptive updating of the search domain
AI-BRB adopted a strategy of adaptive updating of the search domain. This method combined the accuracy of the output results of the model and adjusted the size of the next search and according to the accuracy. When the output accuracy was high, the search domain of the model became smaller, and when the output accuracy was low, the search domain of the model became larger. In the BRB model, the size of the search domain is critical to solving the problem. However, the fixed size of the search domain may not adapt to the needs of different problems, so it becomes very necessary to implement the adaptive update of the search domain. By adaptively updating the search domain size, we can better adapt to complex and changing problems and improve the performance, interpretability and robustness of the BRB model. At the same time, adaptive updating can shorten the computing time and reduce the waste of computing resources. A wider space can also be searched around the current optimal solution to avoid the model falling into the local optimal solution and failing to find the global optimal solution. Therefore, it is very important to realize the adaptive updating of the search domain in the BRB model. The implementation process is as follows:
where lb and ub are respectively the lower and upper bounds of the search domain after adaptive updating of the model.
Optimization of the AI-BRB model
During the fault detection procedure, incorporating an optimization algorithm is crucial to refine the proposed model. This approach enhances fault detection accuracy and reduces the discrepancy between initial parameters and actual data. This section highlights the optimization process using the enhanced P-CMA-ES. The step-by-step construction of the optimization algorithm is detailed below:
Step 1
Construct the objective function. Optimize the model parameters by training data to improve the fault detection accuracy of the AI-BRB model. The specific function of the objective optimization process is as follows:
where \(MSE(*)\) represents the mean square error and indicates the degree of difference between the true value and the predicted output value of the fault detection model. It can be expressed by the following equation:
In the above expression, \(\beta _{lp}\) represents the minimum belief degree given by each expert, \(\beta _{up}\) is the maximum, y is used to represent the actual output, \(y'\)represents the predicted value, and N represents the quantity of data samples.
Step 2
Initialization operation, set initialization parameters, set initial population size as O, offspring population size as o, initial step size as \(\varepsilon ^o\), and initial covariance matrix as \(E^o\), initial mean expression as follows:
Step 3
Sampling operation, set interpretable constraints, adjust rules:
Constraint operation: In the optimization process, it should be ensured that the model parameters retain their original physical meaning, and the constraints are implemented, as shown in Eq. (21) and (22) in Subsection 5.2.
Step 4
Implement the adaptive update of the search domain,as shown in Eq. (23) in Subsection 5.3.
Step 5
Projection operation: The projection operation is performed for each equality constraint, and the procedure is described as follows:
where \(h = (1,...,H)\) represents the quantity of variables in an equality constraint, H is the solution in each equality constraint, and when the constraints are equal, the number can be represented by \(\gamma\). \(\Omega\) represents the parameter vector.
Step 6
Selection operation, select the optimal subgroup,calculate the mean square error of each population, and perform grouping. The specific grouping operations are as follows:
Step 7
Adaptation, update the search covariance matrix and path, etc. The specific process is implemented as follows:

Optimization of the AI-BRB model.
The improved P-CMA-ES optimization algorithm has the following advantages:
-
a.
The algorithm has interpretability constraints, which will not destroy the interpretability of the model, compare with traditional P-CMA-ES39;
-
b.
The algorithm has adaptive search ability and will not fall into local optimal solution, compare with traditional P-CMA-ES40;
The algorithm has the advantages of rotation invariance and expansion rotation invariance.
Based on the above advantages and discussions, the P-CMA-ES algorithm with interpretability constraints is shown in Fig. 3.
Case study
System description
Since the generators in a smart grid system interact with each other, the failure of one or more generators can lead to biased output from the failed generators, which may affect not only the neighboring generators but also the entire smart grid system. Therefore, this section examines the smart grids system with 10 generators36. The dynamics of each generator are described by Eqs. (5) and (6). Detailed parameters of the system can be found in reference36. In this smart grid system, suppose that generators 1 and 10 are faulty. The incipient faults in generators 1 and 10 are modeled by introducing fault parameter, denoted as \(\rho _1 = rand\) and \(\rho _{10} = rand\), respectively, where rand represents a random number. This “incipient fault” refers to an early-stage fault or malfunction that has just begun to develop in the generators but has not yet fully manifested. The value of \(\rho\) indicates the degree of fault severity, with the random number representing the uncertainty in the fault’s magnitude. Such faults can gradually worsen over time, potentially leading to significant performance degradation or failure of the generators.

Communication topology.
The communication graph of the generators in the smart grids system is shown in Fig. 4.

\(\varphi _i\) under normal conditions.

\(\phi _i\) under normal conditions.

\(\varphi _i\) when generators 1 and 10 are faulty.

\(\phi _i\) when generators 1 and 10 are faulty.

AI-BRB iterative process diagram.
The initial speed and power angle for each generator are set as: \(\begin{gathered} \delta _{1} = 58,\delta _{2} = 65,\delta _{3} = 69,\delta _{4} = 56.2,\delta _{5} = 55,\delta _{6} = 71, \hfill \\ \delta _{7} = 50,\delta _{8} = 63,\delta _{9} = 64,\delta _{{10}} = 71,\omega _{1} = 62.5,\omega _{2} = 58.7, \hfill \\ \omega _{3} = 63,\omega _{4} = 57.6,\omega _{5} = 63,\omega _{6} = 57.8,\omega _{7} = 58.6,\omega _{8} = 58.8,\omega _{9} = 62.1,\omega _{{10}} = 63.4 \hfill \\ \end{gathered}\). As shown in Figs. 5 and 6, under the normal condition, the power angle and the speed of each generator reach a consistent state over a period of time.
Figures 7 and 8 show the trajectories of power angle and the speed of each generator when generators 1 and 10 experience incipient faults. It can be clearly seen from the figures that after the system stabilizes, the speeds of generators 1 and 10 are significantly different from those of the non-faulty generators, while the power angles are not significantly different.
AI-BRB based fault detection model construction
The power angle and rotational speed obtained by calculation are the prior attributes of AI-BRB model, reference points and values are set for attributes and output results, and confidence rules are built based on AI-BRB, then the fault detection model of the smart grids system based on AI-BRB is described as Eq. (4).
Using the fault detection model of generator 1 as an example, data integration establishes the semantic values for \(\varGamma _1\) as [a1, b1, c1, d1, e1, f1] and those for \(\varGamma _2\) as [a2, b2, c2, d2, e2] . The reference values for each attribute are shown in Tables 2 and 3. Regarding the fault detection outcome, the semantic values and reference values are organized as shown in Table 4. Table 5 presents the belief rules optimized by P-CMA-ES, where ruleyou denotes the optimized rule weight, and beliefyou represents the optimized belief degree.

Accuracy of the AI-BRB result accuracy.
During the model training process, the step size is set to 0.01, with a total of 800 data sets. Of these 800 sets, 400 originate from the generator and its neighbors under normal conditions, while the other 400 are from the generator and its neighbors during failure. Moreover, the iteration count for the optimization model is set to 200. Figure 9 shows a three-dimensional map of the accuracy of the detection results during the iteration process of the AI-BRB fault detection model. Figure 10 shows the accuracy of fault detection results after the iteration of the AI-BRB model. The results show that the experimental output data are in good agreement with the actual data, and the accuracy rate is \(99.00\%\). In general, the established AI-BRB model performs well in fault detection for smart grids.
Introduce abrupt faults into the smart grid system
In this experiment, a three-phase short circuit was introduced as the abrupt fault type, layered on top of initial fault conditions to simulate a compounded fault scenario. The abrupt fault was applied between 5 and 10 seconds on Generators 1 and 10, defined as \(\rho _1^{\star } = 5\times rand\) and \(\rho _{10}^{\star } = 5 \times rand\), to significantly amplify their impact. This approach more realistically replicates complex, real-world disruptions, providing valuable insights into the generator system’s ability to maintain stability under extreme conditions. Figures 11 and 12 show the effects of these abrupt faults on each generator’s power angle and speed trajectories, respectively. As illustrated, the abrupt faults induced substantial fluctuations and deviations in performance metrics, emphasizing the system’s transient response to instability. These responses are crucial for understanding generator behavior under stress, as they reveal vulnerabilities in resilience, synchronization, and stability that may go undetected under steady-state conditions. Therefore, studying such abrupt faults is essential for designing systems resilient to unexpected real-world disruptions.
Additionally, Fig. 13 displays the fault detection performance of an AI-BRB detection system after introducing abrupt faults. Impressively, the AI-BRB model achieves a detection accuracy rate of \(99.5\%\). This high level of accuracy demonstrates that the AI-BRB system can reliably and precisely identify faults, including both incipient faults and abrupt faults. The model’s robust performance suggests it can serve as a valuable tool for early fault diagnosis, enabling timely intervention and minimizing the risk of prolonged instability or catastrophic failure.

\(\varphi _i\) when generators 1 and 10 are abrupt faulty.

\(\phi _i\) when generators 1 and 10 are abrupt faulty.

Fault detection results of AIBRB after introducing abrupt faults.
Compared with traditional BRB method
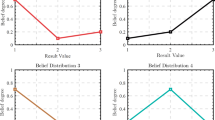
The original confidence distribution of the AI-BRB rule is established by experts based on the history of smart grid fault cases and long-term practical experience, and its distribution trend should be convex and monotonous. Due to cognitive fuzziness, expert knowledge can provide a reasonable and reliable trend for the belief distribution, although it may not be entirely accurate. By modifying and optimizing the initial parameters given by the process, the confidence of the output of the AI-BRB model with expert knowledge is infinitely close to the initial confidence. As illustrated in Figs. 14 and 15, the confidence in the AI-BRB output aligns with the confidence trend of expert knowledge, and there are no dips in the curve. This demonstrates that the AI-BRB model exhibits good interpretability.

AI-BRB confidence distribution (rule 1–15).

AI-BRB confidence distribution (rule 16–30).
As shown in Fig. 16, the accuracy of the traditional BRB model results is only \(82\%,\) which is significantly lower than that of the AI-BRB model results. Furthermore, Figs. 17 and 18 show that the confidence distribution trend of the traditional BRB model’s output deviates from that of the initial expert knowledge. Additionally, the confidence distribution of the traditional BRB model exhibits a midpoint decline, as illustrated by Rules 4 and 5. This significantly deviates from actual smart grid systems and undermines interpretability.

Accuracy of the BRB method.

BRB confidence distribution (rule 1–15).

BRB confidence distribution (rule 16–30).
Comparison with BP, ELM and RBF methods
This paper employs ELM, RBF, and BP neural network as three other comparison methods for fault detection in smart grids. The paper presents the fitting plots of the three experiments, illustrating that ELM, RBF, and BP neural network methods are feasible but not as accurate as the AI-BRB scheme. Additionally, the discrepancies between ELM, RBF, and the AI-BRB scheme are relatively significant, whereas those between the BP neural network and the AI-BRB scheme are minimal.
As shown in Figs. 19, 20 and 21, BP, ELM and RBF methods are used to fit images respectively, and their fault detection accuracies are 0.75, 0.55 and 0.825, respectively. In comparison, the AI-BRB method achieves an accuracy of 0.99.
To minimize randomness, the accuracy of 10 sets of data for each method is calculated, and the average of these accuracies is used as the final output. A line chart depicting the accuracy of these 10 sets is shown in Fig. 22.

Fitting diagram of experimental results by BP method.

Fitting diagram of experimental results by ELM method.

Fitting diagram of experimental results by RBF method.

Comparison of results accuracy of each method.
In this paper, the total average accuracy of four methods was calculated, and the average accuracy of BP method is \(72.95\%\), ELM method is \(45.4\%\), RBF method is \(82.5\%\), and AI-BRB method is \(97.64\%\).
Compared with FTBRB method
In order to reflect the superiority of AI-BRB method in smart grids fault detection, this paper adopts a new model to conduct comparative experiments under the same background. FTBRB is a fault detection method based on fault tree analysis and hierarchical BRB proposed by Cheng et al.41, as shown in Fig. 23, the experimental result of the model is \(93.5\%\). This method is superior to the above traditional methods in fault detection, but these methods do not take interpretability into account, and the results are not convincing. It can be seen that AI-BRB method can be better applied to the fault detection of smart grids.

Fitting diagram of experimental results by FTBRB method.
Experimental conclusion
The experiment confirmed the feasibility of the AI-BRB model proposed in this paper, demonstrating that it significantly outperforms other methods in fault detection. While RBF, BP, and FTBRB neural network methods achieve high detection accuracy, they exhibit notable shortcomings compared to the AI-BRB approach. Specifically, the RBF, BP, and ELM methods are limited by their black-box nature, which hampers their ability to explain their processes, leading to lower interpretability and persuasiveness. Additionally, these methods show poorer image fitting and lower accuracy relative to AI-BRB. Although the FTBRB method provides a transparent modeling process, its interpretability is not adequately addressed in the optimization phase, resulting in less reliable outcomes. In contrast, the AI-BRB fault detection method proposed in this paper offers superior interpretability and higher precision, demonstrating clear advantages over all other methods tested. The experimental results validate the effectiveness and reliability of the AI-BRB model, confirming its potential as a robust solution for fault detection in complex systems.
Conclusions
To balance and optimize the conflicting goals of model interpretability and detection accuracy, this paper proposes a fault detection model based on an adaptive interpretable belief rule base (AI-BRB). First, by integrating expert knowledge with small-scale samples, we constructed an AI-BRB model that prioritizes interpretability, establishing a solid foundation for the subsequent optimization process. Second, we advance the model by incorporating the P-CMA-ES algorithm with interpretability constraints, ensuring that the model’s interpretability remains intact while optimizing its parameters, thus preserving its transparency and reliability. Finally, by designing an adaptive search domain, we enhance the robustness and effectiveness of the optimization algorithm, avoiding local optima and obtaining more interpretable solutions within a more reasonable parameter space.
These three contributions are interrelated and progressive, ensuring that interpretability and practicality are balanced at each stage, from model construction to parameter optimization. This multilevel approach provides a precise and transparent solution for fault detection in smart grids, thereby enhancing the system’s reliability and practical value.
It is important to note that the interpretable adaptive fault detection method for smart grids based on belief rules proposed in this paper is a comprehensive approach designed for large and complex detection environments. Its primary aim is to balance and optimize the conflicting goals of model interpretability and detection accuracy, thereby reducing false positive and false negative rates. However, it does not currently provide precise fault location identification. Therefore, future research will focus on improving fault detection accuracy, particularly in pinpointing specific fault locations.
Data availability
The datasets used and/or analysed during the current study available from the corresponding author on reasonable request.
References
Yang, R. et al. Cooperative tracking problem of unknown discrete-time MIMO multi-agent systems with switching topologies[J]. Nonlinear Dynam. 110(3), 2501–2516 (2022).
Feng, Z. et al. Fault-tolerant control based on belief rule base expert system for multiple sensors concurrent failure in liquid launch vehicle[J]. Nonlinear Dynam. 111(5), 4357–4373 (2023).
Sabri, O., Lehericy, L. & Muzy, A. Multi-agent learning via gradient ascent activity-based credit assignment[J]. Sci. Rep. 13(1), 15256 (2023).
Shitharth, S. et al. A conjugate self-organizing migration (CSOM) and reconciliate multi-agent Markov learning (RMML) based cyborg intelligence mechanism for smart city security[J]. Sci. Rep. 13(1), 15681 (2023).
Feng, Z., Yang, R., Zhou, Z., et al. Online fault diagnosis and tolerance based on multi-expert joint belief rule base for sensor failures of vehicles. IEEE Trans. Instrument. Meas.(2023).
Yang, R., Liu, L., Feng, G. Cooperative tracking control of unknown discrete-time linear multiagent systems subject to unknown external disturbances[J]. IEEE Trans. Cybernet. (2022).
Castro, B. M., Reis, M. M. & Salles, R. M. Multi-agent simulation model updating and forecasting for the evaluation of COVID-19 transmission[J]. Sci. Rep. 12(1), 22091 (2022).
Proksch, S. et al. Coordination dynamics of multi-agent interaction in a musical ensemble[J]. Sci. Rep. 12(1), 421 (2022).
Verstraeten, T. et al. Multi-agent thompson sampling for bandit applications with sparse neighbourhood structures[J]. Sci. Rep. 10(1), 6728 (2020).
Muzahid, A. J. M. et al. Multiple vehicle cooperation and collision avoidance in automated vehicles: Survey and an AI-enabled conceptual framework[J]. Sci. Rep. 13(1), 603 (2023).
Yang, R., Su, X., Zhang, S., et al. Simultaneous fault detection and leader-following consensus for multi-agent systems with directed graphs via dynamic event-triggered strategy[J]. IEEE Trans. Instrument. Meas. (2023)
Souhe, F. G. Y. et al. Fault detection, classification and location in power distribution smart grids using smart meters data[J]. J. Appl. Sci. Eng. 26(1), 23–34 (2022).
Alonso, M. et al. Smart sensors for smart grids reliability[J]. Sensors 20(8), 2187 (2020).
Patnaik, B. et al. MODWT-XGBoost based smart energy solution for fault detection and classification in a smart microgrid[J]. Appl. Energy 285, 116457 (2021).
Yilmaz, A. & Bayrak, G. A real-time UWT-based intelligent fault detection method for PV-based microgrids[J]. Electr. Power Syst. Res. 177, 105984 (2019).
Bayrak, G. Wavelet transform-based fault detection method for hydrogen energy-based distributed generators[J]. Int. J. Hydrogen Energy 43(44), 20293–20308 (2018).
Lucas, F. et al. Fault detection in smart grids with time-varying distributed generation using wavelet energy and evolving neural networks[J]. Evolving Syst. 11, 165–180 (2020).
Yan, Z., Guo, P., Zhang, H., et al. A hidden fault diagnosis method of relay protection considering the lack of sample synchronization[C]. //2023 IEEE/IAS 59th Industrial and Commercial Power Systems Technical Conference (I &CPS). IEEE, 1-5 (2023).
Belhadi, A. et al. Privacy reinforcement learning for faults detection in the smart grids[J]. Ad Hoc Netw. 119, 102541 (2021).
Li, J. et al. Resource orchestration of cloud-edge-based smart grids fault detection[J]. ACM Trans. Sensor Netw. (TOSN) 18(3), 1–26 (2022).
Omitaomu, O. A. & Niu, H. Artificial intelligence techniques in smart grids: A survey[J]. Smart Cities 4(2), 548–568 (2021).
Sattar, M. K. et al. IoT based fault detection and protection of power transformer in the smart grids[J]. Eng. Proc. 12(1), 7 (2021).
Khadse, C., Patharkar, A.A., & Chaudhari, B.S. Electromagnetic field and artificial intelligence based fault detection and classification system for the transmission lines in smart grids[J]. Energy Sources Part A Recovery Utilization Environ. Effects. 1–15 (2021).
Paul, M., Debnath, S. & Chatterjee, B. Fault detection and classification scheme for smart grids considering high impedance evolving and cross-country faults[J]. Electr. Eng. 104(4), 2553–2568 (2022).
Kandasamy, M., Anto, S., Baranitharan, K., et al. Smart grids security based on blockchain with industrial fault detection using wireless sensor network and deep learning techniques [J]. J. Sensors. 2023 (2023).
Li, Q., Zhu, Y., Ding, J., et al. Deep reinforcement learning based resource allocation for cloud edge collaboration fault detection in smart grids[J]. CSEE J. Power Energy Syst. (2022).
Akbari, E. et al. A fault-tolerant cascaded switched-capacitor multilevel inverter for domestic applications in smart grids[J]. IEEE Access 10, 110590–110602 (2022).
Jiang, H. et al. Fault detection, identification, and location in smart grid based on data-driven computational methods[J]. IEEE Trans. Smart Grid 5(6), 2947–2956 (2014).
Yang, J. B. et al. Belief rule-base inference methodology using the evidential reasoning approach-RIMER[J]. IEEE Trans. Syst. Man Cybernetics Part A Syst. Humans 36(2), 266–285 (2006).
Feng, Z. et al. A new safety assessment method based on belief rule base with attribute reliability[J]. IEEE/CAA J. Automatica Sinica 8(11), 1774–1785 (2020).
He, W. et al. An interval construction belief rule base with interpretability for complex systems[J]. Expert Syst. Appl. 229, 120485 (2023).
Han, P. et al. Lithium-ion battery health assessment method based on belief rule base with interpretability[J]. Appl. Soft Comput. 138, 110160 (2023).
Hu, G. et al. Hierarchical belief rule-based model for imbalanced multi-classification[J]. Expert Syst. Appl. 216, 119451 (2023).
Cao, Y. et al. A new approximate belief rule base expert system for complex system modelling[J]. Decision Support Syst. 150, 113558 (2021).
Cao, Y., Zhou, Z., Tang, S., et al. On the robustness of belief-rule-based expert systems[J]. IEEE Trans. Syst. Man Cybernetics Syst. (2023).
Shiming, C., Tianhui, L. U. O. & Yanli, G. A. O. Distributed control of power system transient stability including external energy storage[J]. Inform. Control 50(5), 623–630 (2021).
Cao, Y. et al. On the interpretability of belief rule-based expert systems[J]. IEEE Trans. Fuzzy Syst. 29(11), 3489–3503 (2020).
Chen, Y. W. et al. Inference analysis and adaptive training for belief rule based systems[J]. Expert Syst. Appl. 38(10), 12845–12860 (2011).
Cheng, X. et al. A model for flywheel fault diagnosis based on fuzzy fault tree analysis and belief rule base[J]. Machines 10(2), 73 (2022).
Zhou, Z. et al. A hidden fault prediction model based on the belief rule base with power set and considering attribute reliability[J]. Sci. China Inform. Sci. 62, 1–16 (2019).
Cheng, X., Long, M., He, W., et al. Milling fault detection method based on fault tree analysis and hierarchical belief rule base[J]. Comput. Syst. Sci. Eng. 46(3) (2023).
Acknowledgements
Thanks for the all. This study was funded partly by National Natural Science Foundation of China, GrantC, 62203365, 62203461, partly by Shaanxi Provincial Science and Technology Innovation Team 2022TD-24, partly by China Postdoctoral Science Foundation under Grant 2023M742843, partly by Young Talent Promotion Program of Shaanxi Association for Science and Technology under Grant 20220121, 20230125, partly by Aeronautical Science Foundation under Grant 2023Z034053004, partly by the 2024 Heilongjiang Province higher education teaching reform research key projects, partly by the Social Science Foundation of Heilongjiang Province of China under Grant No. 21GLC189, partly by the Foreign Expert Projects in Heilongjiang under Grant No. GZ20220131, and partly by Graduate Innovation Project of Harbin Normal University under Grant No. HSDSSCX2023-6.
Author information
Authors and Affiliations
Corresponding author
Ethics declarations
Competing interests
The authors declare no competing interests.
Additional information
Publisher’s note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
Open Access This article is licensed under a Creative Commons Attribution-NonCommercial-NoDerivatives 4.0 International License, which permits any non-commercial use, sharing, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons licence, and indicate if you modified the licensed material. You do not have permission under this licence to share adapted material derived from this article or parts of it. The images or other third party material in this article are included in the article’s Creative Commons licence, unless indicated otherwise in a credit line to the material. If material is not included in the article’s Creative Commons licence and your intended use is not permitted by statutory regulation or exceeds the permitted use, you will need to obtain permission directly from the copyright holder. To view a copy of this licence, visit http://creativecommons.org/licenses/by-nc-nd/4.0/.
About this article

Cite this article
Li, Y., Bai, Y., Yang, R. et al. Interpretable adaptive fault detection method for smart grid based on belief rule base. Sci Rep 15, 7646 (2025). https://doi.org/10.1038/s41598-025-91897-x
Received:
Accepted:
Published:
DOI: https://doi.org/10.1038/s41598-025-91897-x
Keywords
This article is cited by
-
A student academic performance prediction model based on the interval belief rule base
Scientific Reports (2025)
