
Abstract
This study investigates the vertical pounding response of unequal-span girder bridges, focusing on the effects of rubber bearing stiffness, span ratio, and pier height. With a continuous model simplified and constructed, theoretical solutions for the bridge’s vertical pounding responses are then implemented. Results show that the local contact stiffness between the girder deck and pier is highly correlated with the bridge bearing, affecting the frequency and force of vertical pounding. Additionally, the span ratio impacts the number and magnitude of poundings, with an optimal range identified to minimize the bridge damage from the impact. Additionally, while having minimal effect on the natural period and pounding zone position, pier height significantly influences the amplitude of the pounding force, with higher piers experiencing more frequent but less intense pounding and vice versa. This research underscores the importance of considering vertical earthquake effects in bridge design and provides valuable insights for enhancing the resilience of unequal-span girder bridges.
Similar content being viewed by others
Introduction
In recent years, seismic damage surveys have revealed that vertical seismic actions cause damage and destruction to most bridge structures, particularly in near-fault areas. Traditionally, bridge designs1,2,3,4 have assumed that the amplitude of vertical seismic acceleration is two-thirds of the horizontal seismic acceleration. However, increasing seismic records indicate that near-fault ground motions often result in vertical seismic accelerations exceeding this ratio and surpassing 1. For example, the Northridge and Hanshin earthquakes recorded vertical acceleration peaks greater than horizontal accelerations. Similarly, the Tangshan and Wenchuan earthquakes showed vertical components comparable to horizontal ones5,6,7. Therefore, underestimating or neglecting the impact of vertical earthquakes in bridge seismic design and analysis may pose significant safety risks.
Researchers have examined how high-amplitude vertical earthquakes damage bridges. In the Loma Prieta earthquake, for instance, intense vertical seismic activity caused the girders and piers to separate, leading to deck damage due to pounding8. For bridges with weak connections—such as those using slab rubber bearings—excessive vertical seismic excitations may result in separating the main girder and piers. When the main girder separates and subsequently impacts the ground, tremendous pounding forces are generated. This can increase axial forces, bending moments, and shearing forces on the piers, as well as the bending moment at the mid-span of the girder. Consequently, various forms of destruction can occur on the piers, girders, and bearings. In extreme cases, this might even lead to the bridge deck’s piercing and the girders’ collapse9,10,11,12.
Recently, Yang studied the multiple pounding responses of equal-span bridge structures under near-fault vertical earthquakes, considering rubber bearings as foundations. The main girder was simplified as a simply supported beam, and the bridge piers were simplified as rods. The rubber bearings were simplified as linear springs. The results indicate vertical pounding in bridge structures only occurs under certain conditions. The theoretical solution13,14 for multiple pounding responses of a bridge under vertical seismic excitation is provided. To investigate the response and damage of railway continuous girder bridges under vertical seismic excitations, Biao established a detailed finite element model based on a three-span continuous girder bridge. One hundred records of seismic ground motion were input into the finite element model, with ratios of vertical and horizontal peak ground accelerations set at 0, 1/3, 2/3, 1, 4/3, and 5/3. A total of 1,200 data sets were analyzed. The results in15 indicate a coupling effect between vertical and horizontal seismic excitations in the seismic response of the bridge, and the probability of damage in the main girder increases with the increase of vertical seismic excitation. Shao conducted a study on the seismic performance probability and structural damage of bridges under vertical seismic actions. Fifty near-field seismic ground motion records were selected as input conditions, with ratios of vertical and horizontal peak ground accelerations set at 0, 0.5, 0.7, 1, 1.5, and 2. The results16 indicate that vertical seismic motions have an adverse impact on the probability of bridge damage. Thapa17 conducted a study on the vulnerability of bridges under seismic conditions. Taking a highway bridge as an example, a finite element model of the bridge was established. The seismic response of the bridge in the high seismic zone was investigated by inputting horizontal seismic excitation and simultaneous actions of horizontal and vertical seismic excitations. When considering both horizontal and vertical excitations, the vulnerability of the bridge in the transverse direction becomes more prominent compared to considering only horizontal excitations. An and Song studied bridges’ dynamic response and failure modes under the combined effects of longitudinal and vertical earthquakes. By simplifying the bridge as a beam-spring-bar model, the theoretical solution for the dynamic response of the bridge under bi-directional seismic excitation was derived. The results indicate that under the effect of vertical earthquakes, under certain conditions, the separation between piers and main girders occurs. After separation, poundings occur between piers and main girders. Due to the vertical seismic motion, the increased deformation at the top of piers affects the bending moments, axial forces, and shear forces at the bottom of piers, further affecting the failure modes of piers. Additionally, the study18,19,20 reveals a coupling phenomenon between vertical and longitudinal earthquakes, which impacts the dynamic response of the bridge. Chen21 discussed the influence of vertical seismic action on the separation of bridge main girders and the impact on shear key design. Intense vertical seismic action can cause separation and damage to the upper structure of the bridge due to lateral impact, exacerbating damage to the shear keys and increasing the risk of beam displacement. Tamaddon studied the influence of curvature angles on the transient response of continuous bridges under near-field vertical seismic actions. For curved bridges with different central angles, vertical poundings occur within a range of natural periods, and the impact intensity is correlated with seismic excitation. Moreover, when horizontal excitations occur immediately after vertical excitations22,23, the lateral displacement of the bridge deck caused by the impact may result in detachment of the deck from the rubber bearings or even detachment from the piers. Wang24,25 discussed the effect of ground motion incidence angles on the seismic response of skewed bridges retrofitted with buckling-restrained braces under vertical and horizontal ground motions. Chen utilized the dynamic substructure method to study the dynamic response of the bridge system under the combined effects of vertical and horizontal seismic forces. The research results26 indicate that large vertical seismic motions have a significant pounding on the seismic response of the elevated bridge system.
From our current literature review, the theoretical investigation of vertical seismic responses of bridge structures is limited. Thus, in the present manuscript, we use the developed theoretical approach to study the vertical seismic responses of the bridge, which sheds light on the numerical approach for related research. The analysis of vertical seismic damage reveals that vertical earthquakes can cause bridge decks to throw up and fall, leading to pounding phenomena that damage the structure. The specific impact of various bridge structural parameters on the characteristics of vertical pounding requires further investigation. This research focuses on unequal-span girder bridges and their response to vertical pounding. A beam-spring-rod continuum dynamics model is developed, and the theoretical solution for multiple pounding responses in unequal-span continuous girder bridges under near-field vertical seismic excitation is derived using the characteristic function expansion method. The study examines the effects of rubber bearing stiffness, span ratios, and pier heights on the vertical pounding phenomenon.
Methodology
Problem set

Model of unequal span girder bridge.
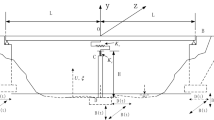
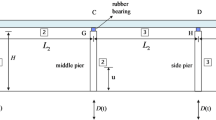
Considering the unequal span of continuous beam bridges with rubber bearings, the displacements at different cross-sections are equal according to the principles of equal stiffness13,14. As shown in Fig. 1, the girder, considered as simply supported beam (SSB) assuming as Bernoulli-Euler Beam, has a length of \(\:{L}_{g}={L}_{g1}+{L}_{g2}\) with The Bernoulli-Euler Beam Theory does not consider the longitudinal waves along the girder. The pier simplified as the clamped rod as St. Venant Rod has a length of \(\:{L}_{r}\). The St. Venant rod theory merely considers the longitudinal waves along the pier, so the girder and pier need to be slender.
Taking \(\:t\) as the time, \(\:x\) as the vertical position on the beam, and \(\:\xi\:\) as the horizontal position on the rod, then \(\:{y}_{i}\left(x,\:t\right)\:(i=1,\:2)\) is the deflections of beam segments \(\:OA\) and \(\:OB\) and \(\:u(\xi\:,\:t)\) the longitudinal displacement of the rod \(\:CD\). The system components have the equations of the motion described as follows,
where mass density \(\:{\rho\:}_{g}\), area of the cross-section \(\:{A}_{g}\), Young’s modulus \(\:{E}_{g}\), area moment of inertia \(\:I\) for the beam, and Young’s modulus \(\:{E}_{r}\) and cross-section area \(\:{A}_{r}\). mass density \(\:{\rho\:}_{r}\) for the rod. And the boundary conditions of the system components
The displacement, velocity, and acceleration at point O for segments \(\:OA\) and \(\:OB\) (shown in Fig. 1) are the same to keep the beam \(\:AB\) continues, expressed as:
If the pounding phenomenon occurs, multiple poundings between girder and bearing might take place. Two different scenario is considered here, (a) the girder has no contact with the bearing; thus, the simplified beam and rod vibrate independently. In this case, there is no contact force between the beam and the spring, and no additional boundary condition is needed; (b) the girder is in contact with the bearing, and the shearing force and displacement between the beam and the spring can be written as
where δ is the compression displacement of linear spring, K the rigidity of the spring and F the support reaction of bearing, i.e. the pounding force. During the pounding phenomenon, the two scenario repeats. In the first case where the beam and the spring is not contacting with each other, the beam and the rod vibrate independently at two different sets of natural frequencies \(\:{\omega\:}_{bn}\) and \(\:{\omega\:}_{rn}\), respectively. The beam and the rod vibrate together at the same frequency \(\:{\omega\:}_{n}\) in the second case, where the beam and the spring has contact force. As such, the bridge goes through three phases under the vertical earthquake:
-
I.
Pre-separation. During this phase, the beam keeps the initial contact with the bearing. In this phase, the beam and the rod vibrate together at the same frequency \(\:{\omega\:}_{n}\).
-
II.
Separation. The beam is out of contact with the beam. The beam and the rod vibrate separately at two different sets of natural frequencies \(\:{\omega\:}_{bn}\) and \(\:{\omega\:}_{rn}\).
-
III.
Pounding. During this phase, the beam is in contact with the bearing. The beam and the rod vibrate at the same frequency \(\:{\omega\:}_{n}\).
During Phase I, in pre-separations, the initial displacements of the beam and rods can be expressed as
where \(\:{F}_{s}\) is the static contact force between the girder and bearing, expressed as:
While during Phase I, the initial velocity of the beam and rod at different coordinates \(\:x\) are zero, in Phase II and III, the displacement and velocity at various positions of the beam and rod are different.
Solutions
The expansion of transient wave functions in a series of Eigenfunctions (i.e., wave modes)13,14 is employed here to solve the transient responses of the bridge. The displacements of the system in different components, segments OA and OB in the beam, and the rod CD can be expressed as follows:
and the first part of Eq. (8) is the quasi-static solution.
Solution of the transient wave propagations in the out-of-contact case
For the case that beam and rod are out of contact, a detailed description can then be found in13. Here, we write out the different quasi-static solution of the beam as follows:
With \(\:{A}_{mb}=\sqrt{2/\rho\:AL}\), and \(\:{\stackrel{-}{k}}_{mb}=\sqrt{{\omega\:}_{mb}/a}=m\pi\:/L\), for the beam, the form of the different eigenfunction is
Solution of the transient wave propagations in the in-contact case
In the second scenario, where the beam and rod are in contact, the three quasi-static solutions together satisfying inhomogeneous boundary conditions, that is:
Then the second part contains the dynamic part that is the summation of an infinite series of the product the wave modes, as follows:
with flexural wave modes \(\:{\varphi\:}_{nb}^{1}\) and \(\:{\varphi\:}_{nb}^{2}\) for the beam, and longitudinal wave modes \(\:{\varphi\:}_{nr}\) for the rod) and time functions \(\:{q}_{n}\left(t\right)\). Here, the wave modes are governed by the Eigenvalue problem with the eigenequations. The eigenequations of the beam are,
where \(\:a=\sqrt{EI/\rho\:A}\) is the coefficient related to the beam flexural wave speed. The flexural wave modes \(\:{\varphi\:}_{nb}\) can be solved as
where \(\:{k}_{nb}\) is the corresponding wave numbers and \(\:{A}_{n1}\), \(\:{B}_{n1}\), \(\:{C}_{n1}\), \(\:{D}_{n1}\), \(\:{A}_{n2}\), \(\:{B}_{n2}\), \(\:{C}_{n2}\), and \(\:{D}_{n2}\) are the coefficients of the beam. The eigenequations of the rod is,
where \(\:{c}_{r}=\sqrt{{E}_{r}/{\rho\:}_{r}}\) is the rod phase speed. The longitudinal wave modes \(\:{\varphi\:}_{nr}\) can be solved as
where \(\:{k}_{nr}\) is the corresponding wave numbers, \(\:{E}_{n}\) and \(\:{F}_{n}\) are the coefficients of the rod wave modes, respectively. The flexural and longitudinal wave modes form an orthogonal set, which can be derived from the eigenequations:
Thus, one set of linear algebraic equations in matrix form for implementations can be derived from the wave mode functions, boundary conditions, and continuity conditions. The determinant of the coefficient matrix is zero due to the existence of non-trivial solutions:
Then, the beam-rod frequency equations are written as
With \(\:{\varvec{A}}_{n}^{*}\) and the orthogonality relation of wave mode functions, the beam and rod wave modes, along with the coefficients for beam and rod wave modes can thus be determined. We write out the expression of the Eigenfunctions as follows:
with
and
where
Numerical analyses
The computational model used in this paper is a beam-spring-rod continuum model. During the non-separation or non-collision process, the beam and the rod do not separate and are studied as a whole. Therefore, their vibration modes are also the vibration modes of the entire model. The first four vibration modes are shown in Fig. 2, with the red line representing the vibration mode of the beam and the blue line representing the vibration mode of the column (the column only includes axial displacement).

The first four vibration modes of the beam-rod system.
This study reveals that when the vertical seismic excitation period approaches the bridge’s natural vibration period, it can cause severe vertical collisions between the bridge deck and the bridge supports. Additionally, the phenomenon of vertical collision is concentrated within a narrow range of periods where the vertical seismic excitation approaches the natural vibration period of the bridge.
This section employs the parameters from the literature13, varying only the beam span. The girder lengths are set at x1 = 20 m, x2 = 38 m. As in13, vertical seismic excitation is simplified to harmonic excitation. Data on the number of impacts and maximum pounding forces within the first 2 s are extracted, with an epicenter distance of 10 km. Using the established theoretical framework, the study investigates how rubber bearing stiffness, span ratios, and pier heights influence the vertical pounding characteristics of unequal-span bridges under vertical seismic excitation.
The effect of rubber bearing stiffness
The effect on the natural period of bridges

The first four natural periods for the different spring stiffness \(\:K\).
In practice, bridge bearings come in various types with differing stiffness levels, significantly affecting their vertical stiffness. This study examines a range of spring stiffness \(\:K\) ranges from 1.0 × 109 to 5.0 × 109 N/m. We observe changes in the first four natural periods by altering the spring stiffness, as illustrated in Fig. 3.
Figure 3 shows that as the vertical stiffness of the spring increases, the natural period of the girder bridge structure gradually decreases. This observation aligns with the theoretical understanding that higher stiffness leads to shorter natural periods in vibrational systems. The decrease, however, is relatively gradual and becomes less pronounced as the stiffness reaches higher values. Notably, when the stiffness exceeds a specific threshold (larger than \(\:2.9\times\:{10}^{9}\) N/m), the natural period stabilizes and remains nearly constant. This suggests a practical limit to how much the natural period can be reduced by increasing the vertical stiffness alone.
Furthermore, the model’s second and third natural periods are relatively close. This proximity indicates that the system’s response characteristics are closely spaced in frequency, which could have implications for the dynamic behavior of the bridge under seismic excitation. Specifically, closely spaced natural periods lead to several complex vibration patterns and resonance phenomena that can exacerbate the structural response during an earthquake.
These findings underscore the importance of considering not just the magnitude of the vertical stiffness but also its distribution and the overall dynamic properties of the bridge. In practical terms, just increasing the vertical stiffness of the bearings is not sufficient to mitigate the effects of vertical pounding significantly according to the conclusion from the results. Instead, a more holistic approach is needed, involving optimizing the stiffness of various components, ensuring proper damping mechanisms, and potentially employing the base isolation technique.
The effect on vertical pounding response
Figures 4 and 5 show the number of pounding and the maximum pounding force of the bridge structure under vertical seismic excitations at different periods, with the horizontal axis representing the period of seismic excitation ranging from 0 s to 0.5 s and the vertical axis representing the stiffness of the bearing ranging from \(\:1.0\times\:{10}^{9}\) N/m to \(\:5.0\times\:{10}^{9}\) N/m.

The Pounding times of change bearing stiffness.
According to Fig. 4, the bridge exhibits three striped pounding zones throughout the seismic response process, with the remaining areas being contact zones. These three pounding zones, labeled as I, II, and III, are located near excitation periods of 0.04 s, 0.1 s, and 0.3 s, respectively, and they transition from narrow to wide from left to right. Comparing the natural period diagram of the bridge structure in Fig. 3, it can be observed that with the variation of the vertical stiffness of the supports, the first natural period of the girder bridge is around 0.27 s, corresponding to pounding zone III. The second and third natural periods are around 0.1 s, corresponding to pounding zone II, while the fourth is around 0.04 s, corresponding to pounding zone I. The periods in the pounding zones correspond to the bridge’s inherent periods (natural frequency of the system), indicating resonance occurring in these regions. In the three pounding zones, as the excitation period increases, the number of poundings gradually decreases, showing a negative correlation between the two. However, as the vertical stiffness of the support increases, the number of poundings also increases, demonstrating a positive correlation between the two factors. The maximum number of poundings is 42, which occurs in pounding zone I.

The maximum pounding/contact force of change bearing stiffness.
Figure 5 shows that the three pounding zones are present, where the pounding forces in these belt-shaped regions are more significant than the contact forces in other areas. As the vertical stiffness of the support increases, the pounding force also gradually increases, showing a positive correlation between the two factors. Similarly, with an increase in the excitation period, the pounding force gradually increases, exhibiting a positive correlation. The diagram displays the maximum pounding force occurring in pounding zone III, close to the first natural period. The value of the maximum pounding force is 92.8 MN.
The bridge bearing directly affects the local contact stiffness between the bridge deck and the pier. It significantly affects the vertical pounding response, including the pounding times and the vertical pounding force. Therefore, the reasonable design of the bridge bearing may reduce the damage of vertical pounding and improve the ability of the bridge structure to resist vertical earthquakes.
The effect of span ratio
The effect on the natural period of bridges

The first four natural periods in different span ratio.
The natural period of the girder bridge is also related to the spans \(\:{x}_{1}\) and \(\:{x}_{2}\) of the unequal-span continuous beam bridge. Therefore, it is necessary to study the effect of different spans on the natural frequencies of the bridge. In this section, only the value of \(\:{x}_{1}\) is changed, and the value of \(\:{x}_{2}\) is kept constant.
Figure 6 indicates that the natural period increases with the increase of \(\:{x}_{1}\). The first, second, and fourth natural periods show significant changes, while the third natural period changes relatively less. Changing the span ratio of the bridge has a more substantial effect on the natural period of the bridge compared to changing the stiffness of the supports. As the span increases, the natural period of the bridge also increases, making it more susceptible to seismic excitation. The results suggest that the span length of the bridge, particularly the longer span \(\:{x}_{1}\), plays a crucial role in determining the structure’s dynamic characteristics. This highlights the importance of considering span ratios in designing seismic-resistant bridges, as longer spans can lead to higher natural periods and potentially more complex seismic responses.
The effect on vertical pounding response
Figures 7 and 8, respectively, depict the pounding times and maximum pounding force of the bridge structure under different span ratios.

Pounding times of change in the span ratio.
Figure 8 shows four pounding zones: I, II, III, and IV. Compared with the natural period diagram of the bridge in Fig. 7, it can be observed that these four pounding zones are concentrated around the bridge’s natural periods. By varying the value of span ratio, the first natural period is around 0.3 s, corresponding to pounding zone IV; The second natural period ranges from 0.1s to 0.2 s, corresponding to pounding zone III, where the period of pounding zones also varies from 0.1 s to 0.2 s; the third natural period is at 0.07 s, corresponding to pounding zone II, and the fourth natural period ranges from 0.04 s to 0.06 s, corresponding to pounding zone I. When the excitation period is more significant in the pounding zones, the number of poundings is relatively lower, whereas it increases with shorter excitation periods. When the excitation period is around 0.04s, the number of poundings reaches its maximum with 28 occurrences. It is worth noting that when the span ratio is more significant than approximately 0.8, there is no pounding phenomenon near the first natural period of the unequal-span beam bridge. This implies that multiple pounding occurrences do not necessarily happen near the first natural period, as certain conditions must be met. Further research is required to investigate this phenomenon.

The maximum pounding/contact force of change in the span ratio.
Figure 8 shows that the maximum pounding force is greater than the contact force during the pounding phase. The magnitude of pounding forces varies among different pounding zones, with the pounding force being the highest in the zone, corresponding to the second natural period. In contrast, forces in other zones are relatively more minor. Moreover, the distribution of pounding forces near the second natural period pounding zone is not uniform. It exhibits a clear pattern of being more prominent in the middle and smaller at the ends. Specifically, when the value of the span ratio falls within the range of 0.65 to 0.88, the pounding force is maximum, reaching a peak value of 88.2 MN, significantly larger than the forces observed in other regions. This conclusion can guide the structural design of subsequent unequal-span continuous beam bridges, aiming to avoid such span ratios whenever possible.
The effect of pier height
The effect on the natural period of bridges
The actual variation in pier height is significant and closely related to the geographical location of the bridge. This study selects pier heights ranging from 2 m to 40 m. Figure 8 illustrates the changes in the first four natural periods of the girder bridge structure after altering the height.

The first four natural periods in different pier height.
Figure 9 shows the first natural period of approximately 0.28 s. The second and third natural periods of roughly 0.09 s. The fourth natural period of about 0.04s. Figure 9 shows that the effect of pier height on the natural period is relatively small.
The effect of vertical pounding response
Figures 10 and 11, respectively, represent the pounding times and maximum pounding forces of the bridge structure under different vertical seismic excitations with varying pier heights. The x-axis represents the excitation period of the vertical seismic motion, which ranges from 0 to 0.5 s. The y-axis represents the heights of the piers, ranging from 2 m to 40 m.

The Pounding times of change pier height.
Figures 10 and 11 show that, similar to the previous cloud diagrams, there are also three striped pounding zones: I, II, and III. These zones transition from narrow to wide from left to right. With varying pier heights, there is no significant change in the number of poundings. Throughout the entire response process, the maximum number of poundings is 61, occurring in the high-frequency range, which corresponds to the region of smaller excitation periods. The maximum pounding force decreases with increasing pier height, with a peak value of 59.4 MN occurring around an excitation period of 0.28s. Overall, the pier height has a small effect on the natural period of the unequal-span continuous beam bridge and consequently has a minor impact on the vertical pounding zone.
Although the height of the pier has little influence on the natural period of the girder bridge and the position of the pounding zone, it significantly influences the amplitude of the pounding force. The pounding times are higher for high-pier bridges, and the amplitude is relatively small. For low-pier bridges, the pounding times are small, and the amplitude of the pounding force is relatively large.

The maximum pounding/contact force of change pier height.
Conclusions
The present paper investigates the vertical pounding response of unequal-span girder bridges. A simplified continuous model of these bridges is established, and the corresponding theoretical solution for the vertical pounding responses is derived. The effects of the vertical stiffness of rubber bearings, span ratio, and pier height on the vertical pounding phenomenon are examined. The following conclusions are drawn based on the numerical results:
-
1.
The bridge bearing directly affects the local contact stiffness between the bridge deck and the pier. It significantly influences the vertical pounding response, including the number of poundings and the vertical pounding force. Therefore, a reasonable design of the bridge bearing can mitigate the damage caused by vertical pounding and enhance the bridge structure’s ability to resist vertical earthquakes.
-
2.
The span ratio significantly impacts the number of poundings and the maximum pounding force compared to other structural parameters. Additionally, when the span ratio is in the middle range of 0.65 to 0.88, the pounding force reaches its maximum. Therefore, avoiding such span ratios in the design of subsequent unequal-span girder bridges is advisable.
-
3.
Although the height of the pier has little effect on the natural period of the girder bridge and the position of the pounding zone, it significantly influences the amplitude of the pounding force. High-pier bridges experience a higher number of poundings with relatively small amplitudes, while low-pier bridges have fewer poundings but with larger amplitudes of the pounding force.
Recent seismic damages from near-field earthquakes have revealed bridge damages that traditional views cannot adequately explain. These damages are more reasonably attributed to vertical ground motion, resulting in annular cracks, bearing fractures, and local damage to piers. There has been a lack of theoretical explanations for these seismic damages. This study aims to model the bridges, piers, and bearings between them using theoretical methods, derive the theoretical solutions of seismic responses, and describe the possibility of vertical collisions and their influencing factors. While theoretical modeling has some simplifications, the corresponding phenomenon can be explained effectively. The study emphasizes and systematically analyzed the importance of the vertical earthquakes and raises awareness among the engineering and academic communities about the harmfulness of vertical earthquakes to ensure sufficient attention. This research holds particular value for practical projects.
Data availability
The datasets generated during and analyzed during the current study are available from the corresponding author on reasonable request.
References
Wilson, T., Chen, S. & Mahmoud, H. Analytical case study on the seismic performance of a curved and skewed reinforced concrete Bridge under vertical ground motion [J]. Eng. Struct. 100, 128–136 (2015).
Kim, S. J., Holub, C. J. & Elnashai, A. S. Experimental investigation of the behavior of RC Bridge piers subjected to horizontal and vertical earthquake motion [J]. Eng. Struct. 33 (7), 2221–2235 (2011).
Wang, Z., Dueñas-Osorio, L. & Padgett, J. E. Seismic response of a bridge-soil-foundation system under the combined effect of vertical and horizontal ground motions [J]. Earthq. Eng. Struct. Dynamics. 42 (4), 706–713 (2013).
Kunnath, S. K. et al. Effect of near-fault vertical ground motions on seismic response of highway overcrossings [J]. J. Bridge Eng. 13 (3), 282–290 (2008).
Bozorgnia, Y., Niazi, M. & Campbell, K. W. Characteristics of free-field vertical ground motion during the Northridge earthquake [J]. Earthq. Spectra. 11 (4), 515–526 (1995).
Yang, J. & Lee, C. M. Characteristics of vertical and horizontal ground motions recorded during the Niigata-ken Chuetsu, Japan earthquake of 23 October 2004[J]. Eng. Geol. 94 (1–2), 50–64 (2007).
Wang, D. & Xie, L. Attenuation of peak ground accelerations from the great Wenchuan earthquake [J]. Earthq. Eng. Eng. Vib. 8 (2), 179–188 (2009).
Han, W., Song, C. & Liang, Q. Strong ground motion at Meizoseisal area & safety of important engineering projects at potential earthquake region [J]. J. Eng. Geol. 12 (4), 346–353 (2004).
Chen, S. et al. Theoretical investigation on multiple separation of Bridge under near-fault vertical ground motion [J]. Math. Probl. Eng. 1, 1–15 (2021).
Varecac, D., Draganic, H. & Gazic, G. Influence of the vertical component of earthquake on large span RC beams [J]. Tehnicki Vjesn. 17 (3), 357–366 (2010).
Kim, S. J., Holub, C. J. & Elnashai, A. S. Analytical assessment of the effect of vertical earthquake motion on RC Bridge piers [J]. J. Struct. Eng. 137 (2), 252–260 (2011).
Wang, Z., Dueñas-Osorio, L. & Padgett, J. E. Seismic response of a bridge-soil-foundation system under the combined effect of vertical and horizontal ground motions [J]. Earthq. Eng. Struct. Dynamics. 42 (4), 545–564 (2013).
Yang, H. & Yin, X. Transient responses of girder bridges with vertical poundings under near-fault vertical earthquake [J]. Earthq. Eng. Struct. Dynamics. 44 (15), 2637–2657 (2015).
Yang, H. et al. Theoretical investigation of Bridge seismic responses with pounding under near-fault vertical ground motions [J]. Adv. Struct. Eng. 18 (4), 453–468 (2015).
Wei, B. et al. Effects of vertical ground motions on seismic vulnerabilities of a continuous track-bridge system of high-speed railway [J]. Soil Dyn. Earthq. Eng. 115, 281–290 (2018).
Shao, Y. et al. Empirical models of Bridge seismic fragility surface considering the vertical effect of near-fault ground motions[C]. Structures 34, 2962–2973 (2021).
Thapa, S., Shrestha, Y. & Gautam, D. Seismic fragility analysis of RC bridges in high seismic regions under horizontal and simultaneous horizontal and vertical excitations[C]. Structures 37, 284–294 (2022).
An, W. & Song, G. Transient response of Bridge piers to structure separation under near-fault vertical earthquake [J]. Appl. Sci. 11 (9), 4068 (2021).
An, W., Song, G. & Chen, S. Near-fault seismic response analysis of bridges considering girder impact and pier size[J]. Mathematics 9 (7), 704 (2021).
An, W. & Song, G. Influence of bearing on pier failure considering the separation condition under near-fault earthquake [J]. Symmetry 13 (4), 692 (2021).
Chen, S., Moustafa, M. K. & Aimi, M. J. The effect of Bridge girder-bearing separation on shear key pounding under vertical earthquake action-A state-of-the-art review[C]. Structures 55, 2445–2460 (2023).
Tamaddon, S., Hosseini, M. & Vasseghi, A. Effect of non-uniform vertical excitations on vertical pounding phenomenon in continuous-deck curved box girder RC bridges subjected to near-source earthquakes[J]. J. Earthquake Eng. 26 (10), 5360–5383 (2022).
Tamaddon, S., Hosseini, M. & Vasseghi, A. The effect of curvature angle of curved RC box-girder continuous bridges on their transient response and vertical pounding subjected to near-source earthquakes[C]. Structures 28, 1019–1034 (2020).
Wang, Y., Ibarra, L. & Pantelides, C. Seismic retrofit of a Three-Span RC Bridge with Buckling-Restrained Braces[J]. J. Bridge Eng. 21 (11), 04016073 (2016).
Wang, Y., Ibarra, L. & Pantelides, C. Effect of incidence angle on the seismic performance of skewed bridges retrofitted with buckling-restrained braces [J]. Engineering Structures, 211(2020): 110411. (2020).
Chen, L. et al. A near-fault vertical scenario earthquakes-based generic simulation framework for elastoplastic seismic analysis of light rail vehicle-viaduct system [J]. Veh. Syst. Dyn. 59 (6), 949–973 (2021).
Author information
Authors and Affiliations
Contributions
The authors declare that the manuscript is an original paper, which has not been published before and has not been submitted to other journals simultaneously.All authors named on the manuscript have made a significant contribution to the manuscript. Each author’s contributions are listed as follows: Lin Zhang: Conceptualization, Data curation, Formal analysis, Investigation, Methodology, Software, Validation, Writing-original draft, Writing-reviewing & editing.Wei Zhang: Conceptualization, Investigation, Supervision, Resources, Validation.
Corresponding author
Ethics declarations
Competing interests
The authors declare no competing interests.
Additional information
Publisher’s note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
Open Access This article is licensed under a Creative Commons Attribution-NonCommercial-NoDerivatives 4.0 International License, which permits any non-commercial use, sharing, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons licence, and indicate if you modified the licensed material. You do not have permission under this licence to share adapted material derived from this article or parts of it. The images or other third party material in this article are included in the article’s Creative Commons licence, unless indicated otherwise in a credit line to the material. If material is not included in the article’s Creative Commons licence and your intended use is not permitted by statutory regulation or exceeds the permitted use, you will need to obtain permission directly from the copyright holder. To view a copy of this licence, visit http://creativecommons.org/licenses/by-nc-nd/4.0/.
About this article

Cite this article
Zhang, L., Zhang, W. Influence of structural parameters on the vertical pounding between girder and pier in unequal-span girder bridges under near-fault vertical ground motions. Sci Rep 15, 9740 (2025). https://doi.org/10.1038/s41598-025-93983-6
Received:
Accepted:
Published:
Version of record:
DOI: https://doi.org/10.1038/s41598-025-93983-6
