
Abstract
This study explores bifurcation phenomena in the nonlinear time-dependent Schrödinger equation and related models, applying Kudryashov’s methods to find exact solutions. It extends the analysis to the nonlinear time fractional Schrödinger equation and the space-time modified Benjamin-Bona-Mahony equation with beta derivatives for fractional dynamics. The paper derives analytical solutions, highlighting the impact of fractional derivatives on wave propagation. A bifurcation analysis shows how parameter changes affect system behavior, with visual representations of wave solutions illustrating the influence of parameters on wave stability and morphology. The work enhances the understanding of fractional differential equations in fields like fluid dynamics, nonlinear optics, and quantum mechanics.
Similar content being viewed by others


Introduction
The dynamics of nonlinear wave propagation in fractional media has gained significant attention in recent years due to its relevance to various complex physical systems. Among the most prominent models are nonlinear Schrödinger equations, which describe wave phenomena in a variety of fields, including fluid dynamics and nonlinear optics. This study focuses on the nonlinear time-dependent Schrödinger equation, extended to incorporate fractional derivatives via the beta derivative. This extension introduces additional complexity to wave dynamics, often leading to nontrivial bifurcations and wave patterns. The main goal of this research is to apply Kudryashov’s techniques to derive exact solutions to these equations and investigate the bifurcation behavior that emerges under specific conditions. By analyzing the stability of fixed points and exploring parameter spaces, we aim to contribute to the understanding of fractional wave systems and their applications to real-world phenomena.
The focus of this article is to deploy two novel analytical techniques, specifically Kudryashov techniques I and II (KM I and KM II), to derive solutions for nonlinear fractional equations, namely the nonlinear time-dependent Schrödinger equation and the space-time modified Benjamin-Bona-Mahony (BBM) equation using the beta derivative1 see also2,3,4,5.
The beta derivative of a function \(\Omega (\chi )\) is given by
Some important properties for this derivative are
where \(\Omega\) and \(\mho\) are two \(\beta\) differentiable functions and \(\beta \in (0,1].\)
History and Introduction
The study of nonlinear wave phenomena, especially in fractional systems, has become increasingly important across various scientific fields. Early work on the dynamics of nonlinear waves in media with fractional derivatives, such as the Korteweg-de Vries (KdV) and Caudrey-Dodd-Gibbon (CDG) models, has shown significant insights into soliton behavior and conservation laws2. Further optimization techniques, particularly for postblast ore boundary determination, have been applied to understand the complexities of nonlinear wave propagation in real-world systems3. In nonlinear optics, the perturbed Chen-Lee-Liu model has been utilized to derive new optical soliton solutions, paving the way for advanced applications in laser propagation4. Extending this, the modified extended Tanh technique has been successfully applied to the complex Ginzburg-Landau equation, which models nonlinear wave interactions in various physical contexts5.
The study of fractional derivatives has also led to the exploration of M-fractional optical solitons in the Gerdjikov-Ivanov equation, offering new perspectives on wave propagation in fractional media1. In recent years, significant contributions have been made to the understanding of the KdV-Caudrey-Dodd-Gibbon model through various soliton and complexiton solutions, continuing to inspire research in nonlinear wave equations6. The application of fractional calculus to ferroelectric materials has further advanced the field, particularly through studies that examine bifurcations and phase portraits in time-fractional models7. Additionally, methods like bifurcation analysis and backstepping strategies have been used to understand complex systems such as supply chain dynamics8.
Meanwhile, fractional-order nonlinear models, especially those incorporating the Atangana beta derivative, have yielded new explicit soliton solutions that enrich the theoretical understanding of wave solutions in nonlinear systems9. Solutions to generalized KdV equations with variable coefficients have also been derived, contributing to the understanding of nonlinear wave behaviors in diverse environments10. Furthermore, traveling wave solutions to space-time fractional modified equations have been studied, shedding light on the intricate behaviors of nonlinear systems with fractional derivatives11. These studies on fractional nonlinear Schrödinger equations have enhanced the diversity of optical solitonic structures and enriched our understanding of nonlinear optical wave propagation12,13.
The application of these techniques has been extended to study optical wave propagation in fiber optics, with multicomponent nonlinear fractional Schrödinger equations offering novel solutions that provide insights into the dynamics of wave solutions in fiber optics14. In addition, studies on modulation instability and optical solitons in multi-dimensional nonlinear Schrödinger systems have opened new directions for research in fiber optics and material science15. Notably, work on the dynamics of optical solitons in spinor Bose-Einstein condensates has demonstrated the potential of fractional systems to describe complex quantum phenomena16. Further contributions to the study of optical pulses in fiber optics have highlighted the significance of fractional dynamics in controlling wave propagation under nonlinear conditions17. Finally, recent research on damping effects in ferrite materials has introduced new exact solutions and solitary waves in the context of magnetic materials, contributing significantly to the broader field of nonlinear wave propagation18.
More accurately, we also have a qualitative study of optical soliton solutions conducted for the (2+1)-dimensional complex modified Korteweg-de Vries system19. Exact solutions to the complex-coupled Kuralay system were unveiled using the generalized Riccati equation mapping method20. Additionally, Lie group analysis was applied to the dual-mode nonlinear Schrödinger equation, revealing group invariant solutions and conservation laws21. Analytical soliton solutions were also derived for a fractional-order dual-mode nonlinear Schrödinger equation, incorporating time-space conformable derivatives22. Furthermore, a Caputo residual power series scheme was adapted for solving nonlinear time fractional Schrödinger equations23.
These advances collectively represent a growing body of work that continues to push the boundaries of understanding in nonlinear fractional systems, offering significant applications in fields ranging from fluid dynamics to quantum mechanics and nonlinear optics.
Novelty and contribution
This work offers a novel approach by incorporating the beta derivative in the analysis of nonlinear Schrödinger and Benjamin-Bona-Mahony equations. The primary innovation lies in the application of Kudryashov’s techniques I and II to extract exact solutions and perform bifurcation analysis in fractional contexts. Unlike previous studies, which often focus on integer-order derivatives, the introduction of fractional derivatives in this analysis provides a deeper understanding of wave behavior under fractional dynamics. This research goes beyond traditional methods, such as the Hirota method, the tanh method, and the sine-cosine method, by offering a detailed exploration of bifurcations in nonlinear systems governed by fractional derivatives. These traditional methods often struggle with the complexity introduced by fractional orders, whereas Kudryashov’s methods handle the nonlinearity and fractional derivatives more effectively. This work expands the applicability of these models in fields like nonlinear optics, quantum mechanics, and fluid dynamics.
Advantages over existing methods
The methods employed in this work, particularly Kudryashov’s techniques I and II, offer several advantages over traditional analytical approaches in nonlinear PDEs. The Hirota method and the tanh method are widely used to find soliton solutions to nonlinear equations, but they often require intricate transformations and fail to provide exact solutions for systems with fractional derivatives. Similarly, the sine-cosine method is effective for some specific nonlinear equations, but it struggles to handle the added complexity of fractional order terms in the equations.
Kudryashov’s techniques, in contrast, allow for the systematic derivation of exact solutions to nonlinear fractional equations, where other methods might fail to yield tractable results. These techniques are highly effective in handling the complex nonlinear terms and fractional derivatives, providing more accurate and efficient solutions. Additionally, the bifurcation analysis conducted in this study provides insights into the stability of solutions, which is critical for understanding the long-term behavior of the system. In contrast to numerical simulations, which may require extensive computational resources, the analytical solutions presented here provide valuable closed-form expressions for wave dynamics, making them useful for practical applications.
The basic idea of the Kudryashov techniques
Now, we present The Kudryashov’s approach for a nonlinear partial differential equation is outlined below:
-
We consider a typical nonlinear PDE of the form:
$$\begin{aligned} \textsf{N}(\Xi , D_{\tau }^{\alpha }\Xi , D_{\chi }^{\alpha }\Xi , D_{\chi }^{\beta }\Xi , D_{\chi }^{\alpha }D_{\chi }^{\beta }\Xi , D_{\tau }^{\alpha }D_{\tau }^{\beta }\Xi , \cdots )=0, \,\,\,0<\alpha , \beta \leqslant 1, \end{aligned}$$(1)in which \(\Xi =\Xi (\chi ,\tau ).\)
-
Transform PDE (1) into an ODE by means of
$$\begin{aligned} \kappa =\dfrac{d \chi ^{d\beta }}{\Gamma (1+\beta )}+\dfrac{c \tau ^{c\alpha }}{\Gamma (1+\alpha )}, \,\,\,\,\,\, \Xi (\chi ,\tau )=\Xi (\kappa ), \end{aligned}$$(2)where \(d, c \in \mathbb {R}\) are fixed.
-
Express Eq. (1) below nonlinear ODE format:
$$\begin{aligned} \tilde{\textsf{N}}(\Xi , \Xi ^{\prime }, \Xi ^{\prime \prime }, \Xi ^{\prime \prime \prime }, \ldots )=0. \end{aligned}$$(3) -
Assume the overall solution of (3) is represented in
$$\begin{aligned} \Xi (\kappa )=a_{0}+a_{1}\Bbbk (\kappa )+a_{2}\Bbbk ^{2}(\kappa )+\cdots +a_{N}\Bbbk ^{N}(\kappa ). \end{aligned}$$(4)where \(\underbrace{a_{i}}_{1\le i \le N}\) are determined later, and the value of \(N\in \mathbb {N}\) is calculated using the homogeneous balance concept. In the following sections, we introduce the Kudryashov technique I (KM I) and the Kudryashov technique II (KM II).
KM I
At this point, suppose
which satisfies
Based on Eqs. (3) and (4), a nonlinear algebraic system is formulated, and its solution provides the answers to (4).
KM II
At this point, suppose
which satisfies
In accordance with (3) and (4), an algebraic system consists of nonlinear unkown variables is obtained, and solving it provides the solutions to (4).
Application of KM’s for the Schrödinger equation
Consider the following nonlinear time Schrödinger equation given by
in which \(\Xi (\chi ,\tau )\) is a complex valued function.
Now, assume
where \(\eta , \lambda , \mu , w\) are fixed. Setting the above transformations in (9), we get
From the imaginary part of (10), we get \(\eta =\frac{A\mu w}{\lambda }.\)
Based on the real part of (10), through the balancing principle between \(\frac{d\widehat{\Xi }^{2}}{\kappa ^{2}}\) and \(\widehat{\Xi }^{3}\), we have \(N=1.\) Thus, the solution of
can be written as follows
where \(a_{0},\) and \(a_{1}\) are constants to be specified later.
Bifurcation analysis of the nonlinear time Schrödinger equation
Definition 3.1
A Pickford bifurcation is a type of bifurcation that occurs in a dynamical system when a parameter variation causes a qualitative change in the system’s behavior. This bifurcation is characterized by the appearance or disappearance of stable and unstable fixed points, typically leading to a sudden change in the number or type of solutions. In mathematical terms, a Pickford bifurcation can be described by the equation:
where \(x\) represents the state of the system, \(\mu\) is the bifurcation parameter, and \(f(x, \mu )\) is the system’s dynamical function. At the bifurcation point, small changes in \(\mu\) lead to qualitative changes in the solution structure, often involving the creation or annihilation of limit cycles, fixed points, or attractors.
Now, to analysis bifurcation of the nonlinear time Schrödinger equation, Eq. (11), first we find the fixed points of Eq. (11) are found by setting the derivative terms to zero:
This simplifies to:
Thus, the fixed points are:
To analyze the stability of the fixed points, consider small perturbations around the fixed points:
where \(\delta (\kappa )\) is a small perturbation. Substituting this into equation (11) gives:
The equation reduces to:
The characteristic equation is:
with roots:
The stability of the perturbations depends on the sign of \(\lambda + A w^2\):
-
If \(\lambda + A w^2 > 0\), the roots are real, and the perturbations grow exponentially, indicating an unstable fixed point.
-
If \(\lambda + A w^2 < 0\), the roots are purely imaginary, leading to oscillatory behavior and a stable fixed point.
Bifurcation points occur where the stability of the fixed points changes, i.e., when \(\lambda + A w^2\) crosses zero:
This is the bifurcation point where the nature of the fixed points changes from stable to unstable or vice versa. As the stability of the fixed point \(\widehat{\Xi }_0 = 0\) varies when \(\lambda + A w^2 = 0\), and new nontrivial fixed points \(\widehat{\Xi }_0 = \pm \sqrt{\frac{\lambda + A w^2}{B}}\) arise, this signifies a pitchfork bifurcation. The system evolves from having a single stable fixed point to three fixed points, one of which is unstable, and the bifurcation has the following characteristics:
-
Pre-bifurcation (\(\lambda + A w^2 > 0\)): The system has a single unstable fixed point at \(\widehat{\Xi }_0 = 0\).
-
At the bifurcation point (\(\lambda + A w^2 = 0\)): The stability of the fixed point \(\widehat{\Xi }_0 = 0\) changes, and two new stable fixed points emerge.
-
Post-bifurcation (\(\lambda + A w^2 < 0\)): The system now has three fixed points: the original one at \(\widehat{\Xi }_0 = 0\) becomes stable, and two new fixed points \(\widehat{\Xi }_0 = \pm \sqrt{\frac{\lambda + A w^2}{B}}\) appear, with stability depending on the sign of the nonlinear term.
The nonlinear time Schrödinger equation exhibits a pitchfork bifurcation as the parameter \(\lambda + A w^2\) passes through zero. The stability of the solutions changes accordingly, and new stable or unstable solutions appear depending on the sign of this parameter. For more detail, we refer the reader to6,7,8,9,10.
At following two sections, we discuss the case studies of KM I and KM II.
Application of KM I
Based on Eq.(11) and Eq.(12) as well as Eq.(6), we derive a system of algebraic equations, given by:
By solving the above system of nonlinear algebraic equations, we obtain
Based on the above we have
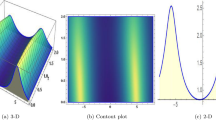
Figure 1 present the real graphs of Eq. (13) for chosen values and \(\beta =0.01, 0.02, 0.03, 0.04, 0.05.\) Figure 2 present the imaginary graphs of (13), for chosen values and \(\beta =0.9, 0.99, 0.999, 0.9999, 0.99999.\)

Note [1], [5], [9], [13], [17] show the graphs of the real part of Eq. (13), and [2], [6],[10], [14], [18], and [3], [7], [11], [15], [19], and [4], [8], [12], [16], [20] display the contour graphs of z,y,x’ axis orientation, respectively, for \(\beta =0.01, 0.02, 0.03, 0.04, 0.05.\).

Note [1], [5], [9], [13], [17] display the graphs of the imaginary part of Eq. (13), and [2], [6],[10], [14], [18], and [3], [7], [11], [15], [19], and [4], [8], [12], [16], [20] display the contour.
Application of KM II
we derive a system of algebraic equations based on (11) and (12) as well as (8), which is described below:
By solving the preceding system of nonlinear algebraic equations, we obtain
From the above, we get
where \(\varsigma :=(\varrho +\rho )\cosh (\mu \chi -\frac{2\eta (A\mu ^{2}-Aw^{2} )}{\beta }(\tau +\frac{1}{\Gamma (\beta )})^{\beta }) +(\varrho -\rho )\sinh (\mu \chi -\frac{2\eta ( A\mu ^{2}-Aw^{2})}{\beta }(\tau +\frac{1}{\Gamma (\beta )})^{\beta }).\)
Application of KMs for the Benjamin Bona Mahony equation
Consider the following space-time adapted Benjamin Bona Mahony equation given by
in which \(\Xi (\chi ,\tau )\) is a complex value function.
Now, assume
where \(\eta , \mu\) are fixed. Setting the above transformations in (15), we get
Integrating (16) regarding \(\kappa\) and disregarding the constant of integration, we get
Through the balancing principle between \(\frac{d^{2}\widehat{\Xi }}{\kappa ^{2}}\) and \(\widehat{\Xi }^{3}\), we have \(N=1.\) Thus, the solution of (17) can be written as follows
in which \(a_{0},\) and \(a_{1}\) are constants that will be defined later.
Next, In the following sections, we present the case studies of KM I and KM II.
Application of KM I
we derive a system of algebraic equations based on (17) and (18) as well as (6), which is given by:
By solving the mentioned system of nonlinear algebraic equations, we obtain
Based on the above we have
Figures 3 and 4 show the real and imaginary graphs of (19), for defined values and \(\beta =0.1, 0.3, 0.5, 0.7, 0.9.\)

Note [1], [6], [11], [16], [21] show the graphs of the real part of Eq. (19), and [2], [7],[12], [17], [22], and [4], [9], [14], [19], [24], and [3], [8], [13], [18], [23], and [5], [10], [15], [20], [25] show graphs of z,y-axis orientation and the contour graphs of z,y-axis orientation, respectively, for \(\beta =0.1, 0.3, 0.5, 0.7, 0.9.\).

Note [1], [6], [11], [16], [21] show the graphs of the imaginary part of Eq. (19), and [2], [7],[12], [17], [22], and [4], [9], [14], [19], [24], and [3], [8], [13], [18], [23], and [5], [10], [15], [20], [25] show graphs of z,y-axis orientation and the contour graphs of z,y-axis orientation, respectively, for \(\beta =0.1, 0.3, 0.5, 0.7, 0.9.\).
Application of KM II
Based on (17) and (18) as well as (8), we obtain a system of algebraic equations, given by:
By solving the mentioned system of nonlinear algebraic equations, we obtain
Based on the above we have
where \(\iota := (\varrho +\rho )\cosh (\frac{\mu }{\beta }(\chi +\frac{1}{\Gamma (\beta )})^{\beta }-\frac{\mu ^{3}+\mu }{\beta }(\tau +\frac{1}{\Gamma (\beta )})^{\beta })+(\varrho -\rho )\sinh (\frac{\mu }{\beta }(\chi +\frac{1}{\Gamma (\beta )})^{\beta }-\frac{\mu ^{3}+\mu }{\beta }(\tau +\frac{1}{\Gamma (\beta )})^{\beta }).\)
Figures 5 and 6 show the real and imaginary graphs of (20), for defined values and \(\beta =0.1, 0.3, 0.5, 0.7, 0.9.\)

Note [1], [6], [11], [16], [21] show the graphs of the real part of Eq. (20), and [2], [7],[12], [17], [22], and [4], [9], [14], [19], [24], and [3], [8], [13], [18], [23], and [5], [10], [15], [20], [25] show graphs of z,y-axis orientation and the contour graphs of z,y-axis orientation, respectively, for \(\beta =0.1, 0.3, 0.5, 0.7, 0.9.\).

Note [1], [6], [11], [16], [21] show the graphs of the imaginary part of Eq. (20), and [2], [7],[12], [17], [22], and [4], [9], [14], [19], [24], and [3], [8], [13], [18], [23], and [5], [10], [15], [20], [25] show graphs of z,y-axis orientation and the contour graphs of z,y-axis orientation, respectively, for \(\beta =0.1, 0.3, 0.5, 0.7, 0.9.\).
Discusion
Figure 7 displays the 2D graph of the non-negative amount of the differences between solutions (19) and (20) for defined values and \(\beta = 0.90\). Additionally, Table 1 shows the absolute amount of the solutions (19) and (20) obtained using Kudryashov techniques with distinct point locations and \(\beta = 0.90\). Also, Table 2 distinctly shows the contrasts among non-negative amount of solutions (19) and (20), denoted by \(\Delta \vert \Xi (\chi , \tau ) \vert\), for fixed \(\chi\), varying amounts of \(\tau\), and \(\beta = 0.90\). It is evident that the contrasts achieved using KM I are smaller than those from KM II, indicating that the outcomes gathered by KM I have greater precision compared to KM II.

Conclusion
This study provides a comprehensive bifurcation analysis of small amplitude unidirectional waves in non-local nonlinear elastic media, utilizing Kudryashov’s methods for deriving exact solutions to nonlinear equations, including the nonlinear time-dependent Schrödinger and the space-time modified Benjamin-Bona-Mahony equations. A significant contribution of this work lies in the application of the beta derivative for fractional dynamics, which introduces a novel perspective to traditional models and allows for a deeper understanding of wave propagation in fractional media.
Key findings from this research include:
-
Bifurcation Behavior: The analysis reveals the critical role of bifurcations in determining the stability of the fixed points of the system. Through parameter variations, we identify the conditions under which the system transitions from a single stable fixed point to three fixed points, one of which is unstable. This transition is indicative of a pitchfork bifurcation, a hallmark of nonlinear wave systems, where the introduction of fractional derivatives has a notable influence on the system’s behavior.
-
Exact Solutions: By deploying Kudryashov’s techniques I and II, this study successfully derives exact solutions for nonlinear fractional equations. These solutions are particularly significant for real-world applications in fields such as fluid dynamics, nonlinear optics, and quantum mechanics. The exact analytical solutions presented here are in contrast to traditional numerical methods, providing a more efficient and accurate means of solving complex nonlinear PDEs with fractional dynamics.
-
Stability Analysis: The stability of solutions is analyzed in depth, with the bifurcation analysis offering insights into the system’s long-term behavior. By examining the roots of the characteristic equation, the study demonstrates how varying the parameters can lead to either stable or unstable solutions, allowing for a more nuanced understanding of the dynamics of nonlinear waves.
-
Methodological Advantage: The Kudryashov methods applied in this work offer a significant advantage over traditional methods such as the Hirota, tanh, and sine-cosine methods. These techniques are more adept at handling the complexities introduced by fractional derivatives, providing a systematic approach to deriving exact solutions in cases where other methods might struggle.
In summary, this work not only enhances our understanding of nonlinear wave propagation in fractional systems but also demonstrates the efficacy of Kudryashov’s techniques in tackling the challenges posed by fractional differential equations. The findings from this study have potential applications in diverse areas, including materials science, optical systems, and quantum field theory, and contribute to the growing body of research in the field of fractional differential equations.
Data availability
Data will be provided by corresponding author on reasonable request.
References
Zafar, A., Ali, K. K., Raheel, M., Nisar, K. S. & Bekir, A. Abundant M-fractional optical solitons to the pertubed Gerdjikov-Ivanov equation treating the mathematical nonlinear optics. Opt. Quant. Electron. 54(1), 1–17 (2022).
Hosseini, K., Akbulut, A., Baleanu, D., Salahshour, S., Mirzazadeh, M. & Dehingia, K. The Korteweg-de Vries- Caudrey-Dodd-Gibbon dynamical model: Its conservation laws, solitons, and complexiton. J. Ocean Eng. Sci. (in press). https://doi.org/10.1016/j.joes.2022.06.003
Yu, Z. et al. Optimization of postblast ore boundary determination using a novel sine cosine algorithm-based random forest technique and Monte Carlo simulation. Eng. Optim. 53(9), 1467–1482 (2021).
Tarla, S., Ali, K. K., Yilmazer, R. & Osman, M. S. New optical solitons based on the perturbed Chen-Lee-Liu model through Jacobi elliptic function method. Opt. Quant. Electron. 54(2), 1–12 (2022).
Chu, Y. et al. Application of modified extended Tanh technique for solving complex Ginzburg-Landau equation considering Kerr law nonlinearity. Comput. Mater. Contin. 66(2), 1369–1378 (2021).
Hosseini, K., Akbulut, A., Baleanu, D., Salahshour, S., Mirzazadeh, M. & Dehingia, K. The Korteweg-de Vries- Caudrey-Dodd-Gibbon dynamical model: Its conservation laws, solitons, and complexiton. J. Ocean Eng. Sci. (to appear).
Li, Z. & Peng, C. Bifurcation, phase portrait and traveling wave solution of time-fractional thin-film ferroelectric material equation with beta fractional derivative. Phys. Lett. A484 , Paper No. 129080, 6 (2023)
Johansyah, M. D. et al. Controlling the unpredicfigure: Bifurcation and backstepping strategies in supply chain dynamics. J. Math. Comput. Sci. 35(2), 229–240 (2024).
Arefin, M. A., Khatun, M. A., Islam, M. S., Akbar, M. A. & Uddin, M. H. Explicit soliton solutions to the fractional order nonlinear models through the Atangana beta derivative. Int. J. Theor. Phys.62(6), paper no. 134, 16 (2023)
Rajagopalan, R., Abdel, Kader A.H., Abdel Latif, M. S., Baleanu, D. & Sonbaty, A. E. Some new exact solutions for a generalized variable coefficients KdV equation. J. Math. Comput. Sci. 29(1), 1–11 (2023).
Rafiq, M. N., Majeed, A., Inc, M. & Kamran, M. New traveling wave solutions for space-time fractional modified equal width equation with beta derivative. Phys. Lett. A446, Paper No. 128281, 5 (2022)
Bilal, Muhammad, Younas, Usman & Ren, Jingli. Dynamics of exact soliton solutions in the double-chain model of deoxyribonucleic acid. Math. Methods Appl. Sci. 44(17), 13357–13375 (2021).
Muhammad, J., Ali, Q. & Younas, U. Three component coupled fractional nonlinear Schrodinger equations: Diversity of exact optical solitonic structures. Mod. Phys. Lett. B38(36), Paper No. 2450373, 16 (2024)
Muhammad, Jan, Younas, Usman, Nasreen, Naila, Khan, Aziz & Abdeljawad, Thabet. Multicomponent nonlinear fractional Schrödinger equation: On the study of optical wave propagation in the fiber optics. Partial Differ. Equ. Appl. Math. 11, 100805 (2024).
Sulaiman, T.A., Younas, U., Younis, M., Ahmad, J., Shafqat-ur-Rehman, B. M. & Yusuf, A. Modulation instability analysis, optical solitons and other solutions to the \((2+1)\)-dimensional hyperbolic nonlinear Schrodinger’s equation. Comput. Methods Differ. Equ.10(1), 179–190 (2022).
Sulaiman, T.A., Younas, U., Yusuf, A., Younis, M., Bilal, M. & Shafqat-Ur-Rehman. Extraction of new optical solitons and MI analysis to three coupled Gross-Pitaevskii system in the spinor Bose-Einstein condensate. Mod. Phys. Lett. B35(6), Paper No. 2150109, 11 (2021)
Younas, U., Ren, J. & Bilal, M. Dynamics of optical pulses in fiber optics. Mod. Phys. Lett. B36(5), Paper No. 2150582, 27 (2022)
Younas, U., Bilal, Muhammad & Ren, Jingli. Diversity of exact solutions and solitary waves with the influence of damping effect in ferrites materials. J. Magnet. Magn. Mater. 549, 168995 (2022).
Kopcasiz, B. Qualitative analysis and optical soliton solutions galore: Scrutinizing the (2+1)-dimensional complex modified Korteweg-de Vries system. Nonlinear Dyn. 112, 21321–21341 (2024).
Kopcasiz, B. Unveiling new exact solutions of the complex-coupled Kuralay system using the generalized Riccati equation mapping method. J. Math. Sci. Model. 7(3), 146–156 (2024).
Kopcasiz, B. Yasar, Emrullah, Dual-mode nonlinear Schrödinger equation (DMNLSE): Lie group analysis, group invariant solutions, and conservation laws. Int. J. Mod. Phys. B 38, 2450020 (2024).
Kopcasiz, B. & Yasar, E. Analytical soliton solutions of the fractional order dual-mode nonlinear Schrödinger equation with time-space conformable sense by some procedures. Opt. Quant. Electron. 55, 629 (2023).
Kopcasiz, B. Yasar, Emrullah, Adaptation of Caputo residual power series scheme in solving nonlinear time fractional Schrödinger equations. Optik 289, 171254 (2023).
Author information
Authors and Affiliations
Contributions
S.R.A., methodology, writing–original draft preparation. R.S., supervision and project administration. M.S.A., editing–original draft preparation. D.O., supervision, project supervision and editing–original draft preparation. All authors have read and approved the final manuscript.
Corresponding author
Ethics declarations
Competing interests
The authors declare no competing interests.
Additional information
Publisher’s note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
Open Access This article is licensed under a Creative Commons Attribution-NonCommercial-NoDerivatives 4.0 International License, which permits any non-commercial use, sharing, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons licence, and indicate if you modified the licensed material. You do not have permission under this licence to share adapted material derived from this article or parts of it. The images or other third party material in this article are included in the article’s Creative Commons licence, unless indicated otherwise in a credit line to the material. If material is not included in the article’s Creative Commons licence and your intended use is not permitted by statutory regulation or exceeds the permitted use, you will need to obtain permission directly from the copyright holder. To view a copy of this licence, visit http://creativecommons.org/licenses/by-nc-nd/4.0/.
About this article

Cite this article
Aderyani, S.R., Saadati, R., Abolhassanifar, M.S. et al. Bifurcation analysis of small amplitude unidirectional waves for nonlinear Schrödinger equations with fractional derivatives. Sci Rep 15, 9895 (2025). https://doi.org/10.1038/s41598-025-94391-6
Received:
Accepted:
Published:
DOI: https://doi.org/10.1038/s41598-025-94391-6
