
Abstract
As power systems around the world shift to incorporate more renewable energy sources, particularly wind power, maintaining grid stability becomes increasingly challenging due to the inherent variability of these sources. This paper introduces a novel bi-level robust optimization framework that enhances the capabilities of adaptive Under-Frequency Load Shedding (AUFLS) in managing the uncertainties brought by high penetration of wind energy and dynamic participation of electric vehicles (EVs). Central to this framework is an innovative adaptive non-parametric Kernel Density Estimation (AAKDE) technique, which sharpens the accuracy of wind power fluctuation predictions. This method enables more precise and efficient control of load-shedding events, which is crucial for preventing frequency drops that can lead to grid instability. This research proposes a strategic shedding queue mechanism that systematically prioritizes the discharge of EVs based on their real-time state-of-charge and charging behavior. This prioritization minimizes user discomfort and taps into the potential of EVs as flexible energy resources, thus providing substantial support to grid operations. To enhance the responsiveness of our AUFLS approach, we integrate a reinforcement learning model that adjusts in real time to grid conditions, optimizing decision-making for frequency stabilization. Our extensive MATLAB/SIMULINK simulations on an upgraded IEEE 39 bus test system demonstrate a significant reduction in load shedding requirements. Compared to traditional AUFLS methods, our approach cuts load shedding by over 50%, effectively maintains system frequency within safe operational limits, and shows superior performance in scenarios of high renewable variability and EV integration. This research highlights the potential of adaptive non-parametric methods in transforming AUFLS strategies, paving the way for smarter, more resilient power systems equipped to handle the complexities of modern energy landscapes.
Similar content being viewed by others
Introduction
The rising concerns about energy shortages and environmental contamination have caused wind power, among other renewable options, to supplant non-renewable sources in modern power generation systems. Renewable energy systems’ unpredictability and uncertainty destroy the equilibrium between electric demand and production, thus increasing system instability risks. The secure operation of power systems depends on steady frequency stability due to unpredictable conditions resulting from renewable energy volatility and uncertainty. Adaptive Frequency Load Shedding (AUFLS) represents a control strategy which automatically disconnects the least essential loads to preserve electrical system stability, and this technology now receives extensive research interest1,2.
In general, AUFLS implementation involves calculating power shortages and disconnecting certain loads3. Previous studies have explored various methods for assessing power deficits, including the rate of frequency change4, the second derivative of frequency, and the gradient method. Accurate power estimation is crucial for determining the precise amount of load to shed3. Overestimating results in unnecessary load shedding, while underestimating leads to unacceptable frequency deviations. The success of AUFLS largely hinges on precise estimation of power shortages5. employs a uniform neutral space method to enhance calculation accuracy. The generator’s swing equation is utilized for assessing power imbalances6,7. Additionally, in8,9, the swing equation, ramp-up limits, and generators’ rated capacities are considered to aid in accurate power deficit estimation.
The accuracy of power deficit predictions improves when predictive algorithms advance, or stronger forecasting models become operational. The irregular nature of renewable energy systems makes predicting power imbalances much less exact. Because of uncertainty, major system instabilities occur during severe weather events such as blizzards or heavy snowfalls. The existing research provides multiple solutions to deal with these challenges. Research paper10 introduces an estimation step for load shedding cycle deficits, which predicts future power system shortfalls before each round of load shed operations. However, this method is vulnerable when facing continuous generation loss. Accordingly, the Markov model calculates the loss probability of distributed generation11, but the preferred model is not optimal against extreme conditions such as a lightning storm. In another attempt, the probability of generation loss derived from historical data is used to estimate accurate load shedding12. By and large, the discussions of the impact of renewable energy resources on AUFLS are still limited.
It’s widely investigated the method of selectively disconnecting certain electrical loads when needed. Academic researchers have dedicated their efforts to finding preferred locations and developing methods for minimizing necessary load reductions. Determining where and how to shed loads relies upon a sophisticated voltage-related load model rather than an impedance model, as research in13 proposed. This model fails to visualize actual load conditions accurately. In14, the uncertainty of load damping is considered, plus the location and size of shedding are estimated by solving stochastic programming. However, under real-world scenarios, computation burden and system safety are also an integral part of the load shedding algorithm while evaluating shedding accurately. A method to reduce computational requirements by relying on power sensitivity is presented in Reference1. Numerous research papers identified that voltage instability increases due to random load-shedding practices. The multiport network model presented in Reference15 efficiently determines the placement and proper sizing for optimal load shedding when considering transient voltage behaviour on branch lines. Reference16 investigates how power flow tracing prevents voltage instability triggered by load-shedding activities. Using voltage stability analysis techniques improves AUFLS operations by making them appropriate for under-voltage situations.
A power sensitivity approach presented in reference17 demonstrates the potential for lowering system computational requirements. Several scholars have documented the increased danger of voltage instability resulting from random intermittent electric load shutdowns. A multiport network-based approach quickly determines load shedding location and size while reacting to branch line transient voltages. The study in reference18 discusses load-dependent transient voltages and proposes power flow tracing methods for preventing voltage instability that results from shedding loads. When voltage stability features are integrated, the AUFLS strategy becomes more suitable for under-voltage load shedding.
Electric Vehicles (EVs) maintain their operational effectiveness because their constrained limits do not limit their performance compared to other choices. During AUFLS, electric vehicles’ initial state of charge (SOC) maintained a stable equilibrium. EV AUFLS capacity results from calculating real-time power usage against the maximum allowable EV discharge rate, which operators can modify at all times. Under AUFLS conditions, electric vehicles show ideal performance as the main power resource. During AUFLS procedures, EVs are discharged through strategic selection to reduce power deficiencies.
However, EV users’ discomfort and complaints must be monitored while discharging. Therefore, EVs’ priority should be determined and ranked by their charging condition instead of randomly selecting them. In this work, the idea of the shedding queue technique is introduced. The shedding queue aims to speculate user preference and identify EV charging conditions for task allocation. Under various power deficiencies scenarios, the EV allocated at the top of the queue will discharge first, and whoever is at the bottom will be the last to discharge. However, the users’ spontaneous drive from the charging station still exists, decreasing discharging capacity. To address the uncertainty built up by these scenarios, a robust non-parametric kernel density estimation method is used19. Excessive load shedding emerges during extreme situations under these operating conditions. The authorities have yet to complete an investigation into this matter. Compared to electric vehicles (EVs), wind power’s inherent unpredictability is a primary cause of grid power imbalances. A comprehensive wind power forecasting approach, including adaptive non-parametric adaptive Kernel Density Estimation (AKDE), helps manage this forecasting uncertainty properly. The advanced AKDE utilize a design to analyze sequential data through forward and backward processing during each time step20. A non-parametric AKDE method establishes the analysis and determination of forecast errors.
The existing research on AUFLS predominantly relies on deterministic approaches that estimate power deficits through frequency derivatives, generator swing equations, and stochastic programming techniques. While these methods offer improved accuracy in load-shedding operations, they do not effectively account for the uncertainty associated with wind power fluctuations and the dynamic behavior of electric vehicles (EVs). The unpredictability of wind generation introduces significant deviations in frequency stability, while the randomness in EV charging and discharging patterns further complicates AUFLS decision-making. Some studies have attempted to address these issues using probability distributions derived from historical data, Markov models for generation loss prediction, and voltage-sensitive shedding models. However, these methods often lead to overestimations or underestimations of power shortages, resulting in either excessive or insufficient load shedding. Furthermore, most AUFLS schemes do not fully leverage the flexibility of EVs as an alternative to traditional load shedding, and existing studies do not incorporate real-time control mechanisms that prioritize EVs for shedding based on their state of charge (SoC) and user preferences.
Given these limitations, there is a critical need for a robust AUFLS framework that can simultaneously account for wind power uncertainty and EV discharging variability while minimizing unnecessary load shedding. The unpredictability of renewable generation necessitates an advanced forecasting mechanism that can provide a confidence-driven approach to AUFLS decisions, ensuring that load reductions are neither excessive nor inadequate. Participation of EVs in frequency regulation must be structured through an optimized shedding queue, where their discharging priority is determined by factors such as SoC levels and user willingness. Additionally, an adaptive control mechanism is required to dynamically adjust AUFLS operations in real-time based on evolving system conditions. To address these challenges, this study develops a bi-level robust optimization approach that integrates a confidence-interval-based wind power uncertainty model, a non-parametric kernel density estimation technique for EV variability assessment, and a reinforcement learning-based AUFLS strategy that continuously refines shedding decisions based on real-time power imbalances. The proposed approach ensures a resilient and intelligent load-shedding mechanism capable of maintaining frequency stability under extreme conditions such as generator trips and sudden load increases while optimizing the involvement of EVs in AUFLS.
The proposed approach significantly improves AUFLS decision-making, it also introduces computational challenges due to the need for real-time uncertainty modeling, bi-level optimization, and continuous (reinforcement learning) RL-based learning updates. The bi-level robust optimization framework requires solving multiple iterations of uncertainty-constrained load-shedding problems, while the RL component continuously refines its Q-learning-based policy, both of which can increase computational complexity. However, to ensure scalability for large-scale power systems, the proposed approach employs a hierarchical decision-making structure that distributes computational loads efficiently. Additionally, the use of adaptive learning mechanisms reduces the reliance on exhaustive simulations, ensuring that the model remains computationally feasible while effectively managing power imbalances in high-renewable-penetration grids.
Our extensive MATLAB/SIMULINK simulations on an upgraded IEEE 39-bus test system demonstrate that the proposed method significantly reduces load shedding requirements compared to traditional AUFLS (T-AUFLS) and adaptive AUFLS (A-AUFLS) methods. Specifically, our approach reduces total load shedding by over 50%, effectively maintains system frequency within safe operational limits, and exhibits superior performance in scenarios involving high renewable variability and EV integration. These findings highlight the potential of adaptive non-parametric methods and reinforcement learning in revolutionizing AUFLS strategies, paving the way for smarter, more resilient power systems capable of handling the complexities of modern energy landscapes.
We seek to develop protection mechanisms for frequency variations in Frequency Load-shedding systems that must account for wind power uncertainty and electric vehicle charging volatility. Our proposed robust load-shedding optimization technique incorporates wind power variations alongside EV discharging uncertainties. The next sections will analyze the load-shedding sequence of EV conditions. A linear programming model optimizes task allocation procedures for improved system efficiency. This paper’s main contributions are evident in the following details.
-
A confidence-interval-based method is proposed to reduce the impact of wind power uncertainty on AUFLS, which is the first attempt to enable wind power uncertainty to participate in AUFLS scheme formulation. Analytically, the proposed approach is robust to various wind power conditions and events.
-
Utilizes a confidence-interval-based kernel density estimation (AKDE) method to improve wind power prediction and enhance AUFLS decision-making.
-
A comparison with traditional AUFLS (T-AUFLS) and adaptive AUFLS (A-AUFLS) verifies the proposed algorithm’s robustness and effectiveness.
-
Integrates reinforcement learning (RL) to dynamically adjust AUFLS operations, ensuring an adaptive and data-driven response to grid instability.
The rest of this paper is structured in the following manner: Section II outlines the issue of EV dispatch for AUFLS. A AKDE approach appears in Section III. The review of simulation results and conversational analysis occurs in section IV. Section V of the study provides a summary of all conclusions.
Description of the problem
The structure of AUFLS incorporating wind energy and electric vehicles
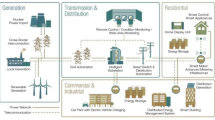
Figure 1 illustrates the hierarchical framework of the AUFLS system that incorporates wind energy and electric vehicles (EVs) to enhance grid stability. At the core of this framework is the Control Center (PMU), which continuously monitors system frequency deviations and computes real-time power loss. The PMU’s calculated power deficit is then processed through an advanced optimization algorithm, which accounts for wind power uncertainty and EV charging dynamics. Based on these calculations, the control center sends optimized load-shedding signals to either traditional load-shedding relays or EV charging stations.
The EV charging stations play a crucial role in this framework, as they provide real-time data on EV availability, state of charge (SoC), and charging demand. This information is relayed to the control center, which determines the optimal discharging sequence using the shedding queue mechanism. As shown in Fig. 1, the hierarchical structure allows for dynamic adjustments in AUFLS operations, ensuring that EV discharging is prioritized based on grid conditions while minimizing user discomfort.
The integration of wind power forecasting within this framework helps mitigate the impact of wind generation variability on AUFLS decisions. The prediction module within the control center processes real-time wind power data and applies the kernel density estimation (AKDE) method to establish confidence intervals for power forecasting. These predictions are then used to refine load-shedding strategies, ensuring that frequency stability is maintained even under high renewable penetration scenarios.

Hierarchical framework of AUFLS.
The effect of wind power variability on AUFLS
The power loss measurement shows that after the load is turned off, the system frequency can return gradually to ' the maximum allowed. However, due to rapid changes in energy deficit, the uncertainty of air energy will affect this behaviour and possibly cause a loss of frequency stability. With a large difference between the supply and the load, the temperature decreases rapidly during the AUFLS, which increases the frequency instability. To maintain the system’s frequency stability, the temperature’s unpredictable effect on the AUFLS must be compensated. This classification is directly related to the accuracy of temperature prediction for the system’s condition ‘view’. However, due to poor load shedding, incomplete wind power prediction leads to frequency instability. Therefore, an efficient and reliable method must be developed to maintain frequency stability in extreme cases.
The variability in EV capacity for AUFLS
An impact-based motion limitation addresses EVs’ unpredictable behaviour. An EV charging station’s capacity is determined by the number of connected EVs and is equivalent to the total energy consumption of all EVs in the network. For instance, EV energy consumption will drop if there are fewer connected EVs. Additionally, the erratic behaviour of EV users, including commuting and shopping, will result in fewer connected EVs, lowering the energy consumption of EV charging infrastructure.
The shedding queue of EVs with user’s willing
EV charging stations sort EVs into the discharge queue and then dispatch them sequentially during the load-shedding process. The EVs above the discharge curve are completely discharged after the load is released, as seen in Fig. 2. The third EV in the queue continues operating until it is fully charged, but the second EV does not. Larger-capacity EVs are more likely to emit. However, classification criteria for EVs consider user preferences as well as capacity. For example, suppose a user chooses to sell unnecessary electricity available to an EV at a high SOC level. Their vehicle must be placed in the drainage system’s first part.
Frequency instability may result from a delayed response to the users’ desires during AUFLS. Therefore, the EV charging station should be able to identify customers’ EV queue location to guarantee frequency stability and consider their willingness. In this scenario, consumers’ initial choices are replaced with an accurate approximation function to ascertain their preferences.

The mechanism of EVs’ shedding queue.
Reinforcement learning (RL)-based under-frequency load shedding (AUFLS) amidst wind power and EV uncertainties
Modeling uncertainty in wind power
The impact of temperature uncertainty on AUFLS is thus significantly reduced by developing a model that relies on confidence intervals to describe temperature uncertainty. Any advanced technology, including long short-term storage that is AKDE20, is considered to be able to represent high temperatures during modelling. Nevertheless, uncertainty modelling is still affected by the inaccuracy of prediction. Therefore, prediction error records should be recorded and analyzed using historical information to make the error model more accurate and practical. For example, error dynamics can also be modelled using data-driven methods, such as the estimation method of (AKDE21. The non-parametric AKDE method can provide an error probability distribution function using the kernel function.
The computation of this analysis does not need assumptions about the probability distribution function for errors. The non-parametric AKDE technique models prediction errors for assessment purposes.
here, \(\:{P}_{Wpre}\left(t\right)\) Is predicted wind power at the time? \(\:t\). \(\:X\left(t\right)\:\)Are input features at a time? \(\:t\) (e.g., historical wind power, wind speed, temperature, etc.). \(\:{f}_{NN}\) is a bi-LSTM mapping function. To clarify, take \(\:{f}_{error}\) as the prediction error probability distribution function and \(\:{E}_{Wpre}=\left\{{E}_{1},\:{E}_{2},\dots\:,{E}_{l}\right\}\) is the prediction error group in history data. \(\:l\) is the number of error examples. Following that, a kernel function modelling of \(\:{f}_{error}\) is calculated using \(\:{E}_{Wpre}\), as shown in Eq. (1).
where b is the bandwidth, which determines the smoothness of the distribution function, Ei is the ith data point of prediction error, and K is a kernel function.
The non-parametric AKDE approach relies on the choice of kernel function K. Frequently utilized and frequently effective in real-world situations is the Gaussian kernel function21. Equation (2) can describe the Gaussian kernel function for error estimation.
From Eqs. (2) and (3), we can obtain the \(\:{f}_{error}\) as Eq. (4).
The formula may be used to calculate the quantile function \(\:{F}_{\text{error}}^{-1}\:\) And the cumulative density function Ferror (5).
By giving an \(\:\alpha\:\), the above and lower limit with \(\:1-\alpha\:\) The working level can be obtained and mathematically expressed as Eq. (6).
where \(\:{\text{U}}_{\text{error}}^{\alpha\:}\text{}\) is the upper bound of wind power and \(\:{\text{L}}_{\text{error}}^{\alpha\:}\:\)is the lower bound of wind power. PWpre is the wind power prediction. PWind is the forecasted wind power for an uncertain future time. \(\:\varvec{U}\) It is a cluster of uncertainty sets.
Wind power forecasting errors are quantified using a AKDE method, which analyzes historical prediction errors to estimate their probability distribution. This distribution is then incorporated into the robust optimization framework by defining confidence intervals 95% that establish upper and lower uncertainty bounds for wind power predictions. These confidence levels influence load shedding decisions by ensuring that the model accounts for different levels of uncertainty, balancing the risk of excessive or insufficient load shedding. In scenarios with higher confidence levels, the optimization framework adopts a more conservative approach, mitigating the adverse effects of wind power fluctuations and improving system stability. Conversely, lower confidence levels allow for a more flexible shedding strategy, reducing unnecessary power cuts while maintaining frequency stability. Numerical simulations demonstrate that increasing the confidence interval leads to more resilient AUFLS strategies, ensuring that load shedding decisions are dynamically adjusted to accommodate real-time wind power variations and minimize unnecessary disruptions to the grid.
EV capacity reliability estimation
The capacity loss of the EV response should be considered, as discussed in Section II. Notably, the time of AUFLS is short, suggesting that random behavior’s of EVs should be considered more in a short time. With this in mind, to consider the short-term random behavior’s accurately, the analysis of both EV connection levels and their power grid frequency changes requires attention to detail. Non-parametric AKDE methods enable the modelling of these temporal fluctuations. EV travel patterns strongly influence connected EV variability, so researchers are exploring a trip chain-based method22,23. to simulate the daily operation of EVs, which is then estimated with a non-parametric AKDE approach. Instead of a complex analysis, a simple mode is adopted here to validate the effectiveness of the proposed method. Real-world data will be used in actual operations.
The uncertainty of EV capacity during AUFLS, the total EV capacity at a charging station is expressed as the sum of individual EV capacities, represented as:
here \(\:{P}_{EV},\:i\left(t\right)\) denotes the power capacity of the \(\:{i}^{th}\) EV at time \(\:t\), and \(\:{N}_{EV}\left(t\right)\) is the number of connected EVs at the time \(\:t\). The change in the number of EVs over time, \(\:{{\Delta\:}N}_{EV}\left(t\right),\) accounts for EV arrivals and departures as,
here \(\:{N}_{arr}\left(t\right)\) is arriving and \(\:{N}_{dep}\) It is departing EVs. A non-parametric AKDE approach approximates the probability distribution of \(\:\varDelta\:{N}_{EV}\left(t\right)\):
here \(\:J\) is the number of simulations, and \(\:{N}_{EV}\left(t\right)\:\)represents samples of EV variations. Confidence intervals are derived from the cumulative density function of f\(\:{f}_{\varDelta\:{N}_{EV}\left(t\right)}\), providing bounds24.
EV arrival and departure times are modelled using statistical distributions. Gamma distribution for arrival times \(\:{T}_{arr}\sim\:Gamma(\alpha\:,\theta\:)\)and Weibull distribution for departure times \(\:{T}_{dep}\sim\:Weibull(k,c)\). A robust optimization framework manages uncertainties, minimizing load-shedding deviation under worst-case conditions. The optimization problem is defined as:
The modeling of EV arrival and departure times in this study is based on the Gamma and Weibull distributions, which are commonly used in transport and power system studies due to their ability to capture real-world behavioral patterns. The Gamma distribution is employed for arrival times as it effectively models skewed distributions, accounting for peak periods and the long tail of late arrivals. Similarly, the Weibull distribution is used for departure times because it accurately represents the decreasing probability of prolonged stays at charging stations, aligning with empirical observations of EV user behavior. However, deviations from these assumptions, such as multimodal distributions or external factors like weather conditions and dynamic pricing incentives, could affect the accuracy of EV availability predictions. In particular, short-term anomalies, including sudden increases or decreases in EV presence, may lead to fluctuations in frequency regulation performance. To mitigate these effects, the proposed model integrates real-time data updates and adaptive learning mechanisms, including kernel density estimation and reinforcement learning, which allow continuous refinement of EV availability estimates. These adaptive strategies ensure that the proposed framework remains robust against uncertainties and deviations from assumed statistical distributions, maintaining the reliability of the EV-based frequency stabilization approach.
The robust optimization-based of AUFLS
The power system in a balanced state satisfies\(\:\:{P}_{Gen}\:\:+\:{P}_{Wind}=\:{P}_{Load}.\) During a fault, the balance is disturbed, leading to power generation loss, load increase, and wind power fluctuation \(\:{\varDelta\:P}_{Wind}\). To stabilize, a shedding plan \(\:{P}_{Sh}\:\)must satisfy \(\:{{P}_{d}+{P}_{Gen}+P}_{Wind}+{\varDelta\:P}_{Wind}={P}_{Load}+{P}_{sh}\), where \(\:{P}_{d}=\epsilon\:\frac{d{f}_{c}}{dt}\), is power deficiency derived from the frequency derivative, and \(\:\epsilon\:=\frac{2}{{f}_{n}}\sum\:{H}_{i}\).
Incorporating EV responses, \(\:{P}_{Sh}=\varDelta\:{P}_{Load}+\varDelta\:{P}_{EV}\), and \(\:\varDelta\:{P}_{EV}\) is the difference in EV power between successive shedding rounds, expressed as \(\:\sum\:_{k=1}^{{N}_{EVCS}}{P}_{EVCS}^{m,k}-\sum\:_{k=1}^{{N}_{EVCS}}{P}_{EVCS}^{m-1,k}\)here \(\:{P}_{EVCS}^{m,k}\) represents the strength of the \(\:{k}^{th}\) EV point in the \(\:{m}^{th}\) round, with \(\:{N}_{EVCS}\) denoting how many EV charging stations there are overall.
To minimize \(\:\varDelta\:{P}_{Load}\), the objective function is formulated as \(\:\varDelta\:{P}_{Load}=(\varDelta\:{P}_{wind}+\epsilon\:\frac{d{f}_{c}}{dt}-\varDelta\:{P}_{EV})\). The constraints ensure \(\:{P}_{wind}\) falls within \(\:\:\left[{L}_{error\:}^{\alpha\:},\:{U}_{error\:}^{\alpha\:}\right]\) Based on wind uncertainty, the number of EVs contributing power is constrained. \(\:{P}_{min\:}{L}_{EV\:}^{\alpha\:}\le\:\sum\:_{i=1}^{\varDelta\:{N}_{EV}^{t}}{P}_{i}^{EV}\le\:{P}_{max\:}{U}_{EV}^{\alpha\:}\). The EV power allocation prioritizes minimizing the difference between required and actual power contributions from EVs: \(\:\sum\:_{i=1}^{\varDelta\:{N}_{EV}^{t}}\sum\:_{n=1}^{{N}_{EV}}{Q}_{EV}.({P}_{n,k,0}^{EV}-{P}_{n,k,m}^{EV}),\:\)here \(\:{Q}_{EV}\) captures the priority index based on the state of charge, charging power, and time. Combining these elements, optimization maximizes the robustness against wind and EV uncertainties while minimizing. \(\:\varDelta\:{P}_{Load}\) under the constraints of wind power, EV availability, and station limits. This provides a robust solution for AUFLS, ensuring stability and reducing the dependency on load shedding.
Shedding queue optimization of EVs
As previously noted, the charging station employs a shedding queue to prioritise EVs based on customer demand and charging behaviour. The EV State of Charge (SoC) scenarios and queue positioning are analysed to fine-tune the shedding queues. For instance, operators can sell additional energy via AUFLS if an EV has a larger capacity. Consequently, the selection of vehicles for power sale should align with the sequence of power generation. An EV that begins charging before entering AUFLS will continue to do so while in the AUFLS state and awaiting release. However, if the charging duration surpasses the prior session, the user may reserve a charging slot without queueing, avoiding unnecessary downloads.
Table 1 shows the characteristics of the EV SoC, charging resistance, corresponding load voltage, and charging time history. Then, their relationship is formed by considering linear functions from Eqs. (14) to (16), respectively. Specifically, we assume that the willingness index is set to 0.5 when charging and discharging times are equal because the probabilities of the two activities are equal.
The functions of charge strength, charge time, and total SOC power are displayed in Eq. (17). Sorting the EVs by size and calculating their QEV shedding index will lead to a straightforward queue. Using robust optimisation, we resolved the power issue where the EV charging station awaits emergency dispatch from the control centre. An objective equation can be specified to provide the EV’s discharge energy function and manage the water pouring schedule by the EV charging station (15). Then, using Eq. (16), construct the EV power function. The allowed power shown by Eq. (17) should be the maximum constraint of dispatch power for EVs. With the suggested programming solution, the power is dispatched.
where, \(\:{\sum\:}_{n=1}^{{N}_{k}^{\text{EV}}}\left({P}_{n,k,m}^{\text{EV}}-{P}_{n,k,m-1}^{\text{EV}}\right)\) is the sum of power supported by the EV coming from the kth EV charging station. When m = 1, \(\:{\text{P}}_{\text{n}\text{,}\text{k}\text{,0}}^{\text{\:EV}}\text{}\) is the nth EV power before AUFLS.
Reinforcement learning (RL) in AUFLS
Reinforcement Learning (RL) is a machine learning approach where an agent interacts with a dynamic environment and learns an optimal decision-making policy through trial and error to maximize cumulative rewards. Unlike traditional AUFLS methods that depend on static thresholds and predetermined rules, RL dynamically adapts to real-time grid conditions by continuously learning from past and present data. This allows RL-based AUFLS to optimize shedding decisions in response to wind power fluctuations, electric vehicle (EV) discharging variability, and grid disturbances, significantly reducing unnecessary load shedding while maintaining frequency stability. The RL-based AUFLS model treats frequency regulation as a Markov Decision Process (MDP), where system states (e.g., frequency deviation, power imbalance, available EVs, wind power) influence the agent’s decisions (e.g., load shedding, EV discharging, BESS utilization) to minimize disruptions and maintain grid stability. The reward function penalizes excessive load shedding and frequency deviations while optimizing energy contributions from renewable and flexible sources. The learning process involves updating Q-values using deep Q-networks (DQN), ensuring an adaptive and data-driven approach to AUFLS strategies. Let the power system be represented as a MDP with state \(\:{S}_{t}\), action \(\:{A}_{t}\), transition probability \(\:\:P\left({S}_{t+1}\right|{S}_{t},\:{A}_{t})\:\), and reward function \(\:{R}_{t}.\) The state space will be:
here \(\:{f}_{t}\) is system frequency, \(\:{P}_{imbalance}\) is the power deficit, \(\:{N}_{EV}\) is the number of available EVs, \(\:{C}_{EV}\) is the EV discharge capacity, \(\:{P}_{BESS}\) is the available battery energy storage system (BESS) power, and \(\:{W}_{t}\) is wind power generation. The RL agent chooses an action \(\:{A}_{t}\) from:
here\(\:\:{P}_{shed}\:\) is the load shedding power, \(\:{P}_{EV}\) is the EV discharging power, and \(\:{P}_{BESS}\) is the BESS discharging power. The RL model follows a reward function that penalizes frequency deviations from the nominal 50 Hz, unnecessary load shedding, and excessive EV discharging to balance grid stability and user convenience. The reward function is structured as a weighted sum of penalties associated with frequency deviation, total load shedding, and EV discharge. The agent iteratively updates its decision policy using a Q-learning-based approach where the Q-values are updated through the Bellman equation, ensuring that the agent learns optimal AUFLS strategies over multiple episodes.
The RL process begins with initializing the agent, defining its state space, actions, reward function, transition probabilities, and discount factor as shown in Fig. 3. The agent then observes the current state and selects an action based on its policy, balancing exploration (trying new actions) and exploitation (choosing the best-known action). After executing the action, it receives a reward and updates its Q-values using the Bellman Equation to improve decision-making. The agent continuously refines its policy, deciding whether it has converged to an optimal strategy; if not, it continues learning, adjusting its policy, and evaluating performance. The cycle repeats until the policy stabilizes, at which point the model is deployed in a real-world scenario. This iterative process enables the agent to dynamically adapt to changing environments, optimizing its decisions over time.

The schematic framework of RL.
here \(\:{f}_{nom}=50\:Hz\) is the nominal frequency, and \(\:{\lambda\:}_{1},\:{\lambda\:}_{2},\:{\lambda\:}_{3}\) are weight coefficients. A deep Q-network is used to approximate the Q-values, leveraging neural networks to handle the high-dimensional state space. The Q-value update is based on a gradient descent step where the difference between predicted and target Q-values is minimized. The target Q-value incorporates future rewards discounted by a factor, ensuring that long-term grid stability is considered is:
Using DQN, update the parameters \(\:\theta\:\) of the neural network by minimizing the loss:
The proposed RL-based approach is tested against traditional AUFLS strategies in numerical simulations, comparing its performance in terms of frequency recovery, total load shedding, and response time. The results demonstrate that RL-based AUFLS significantly reduces unnecessary shedding, ensures faster frequency stabilization, and dynamically adapts to changing grid conditions. Higher confidence intervals for wind power prediction further enhance the robustness of the RL-based shedding strategy.
here \(\:\propto\:\) is the learning rate. RL into the AUFLS framework, the decision-making process becomes more data-driven and adaptive, allowing the grid to efficiently handle power imbalances with minimal shedding. Future work involves improving the model by incorporating multi-agent reinforcement learning (MARL) to enable collaborative decision-making among EVs, BESS, and distributed generation resources. Additionally, integrating cybersecurity detection into the RL model could enhance the resilience of the AUFLS strategy against adversarial attacks.
The effectiveness of RL in AUFLS depends on the careful design of reward functions and learning parameters. The reward function is structured to minimize frequency deviations, penalize excessive load shedding, and promote optimal EV discharging, ensuring grid reliability with minimal disruptions. Learning parameters such as the discount factor, learning rate, and exploration-exploitation balance are fine-tuned through extensive simulations using test systems like the IEEE 39-bus network. By leveraging DQN or similar reinforcement learning techniques, the model iteratively refines its policy over multiple episodes. This continuous adaptation ensures that AUFLS decisions remain robust even under extreme conditions, such as sudden generator trips or load surges, ultimately improving grid stability with significantly reduced load shedding.
Numerical simulation
Simulation system
In this part, four scenarios are presented to validate the effectiveness of our model. In the beginning, the performance of our model in generator trip emergency is shown with the prediction result, which shows that the real wind power is lower than our prediction. Next, the output of our model under the prediction condition is discussed, where the real wind power exceeds our prediction. After that, the explicit relation between the number variation of EVs and system frequency is illustrated. Finally, the load increase emergency is presented to test our model in different fault modes.
The improved IEEE 39 bus system serves as a testbed to evaluate the following best estimate models. The MATLAB/SIMULINK platform yields simulation results for the second-order description of synchronous generators. Three EV aggregator stations operate at bus-5, 6 and 8, where the location features 2–3 EV charging stations, according to Fig. 4. One EV charging station holds 1000 electric vehicles in standard operation. EVs operate at 7 kW of charging power alongside − 7 kW discharging capability. The State of Charge (SOC) and charging power of the EVs are calculated through a Monte Carlo algorithm whose parameters match those of21. The wind facility bus-8 has a rated power output of 60 MW, which generates 19.05% of the total power for the system. This paper draws wind power data from an authentic Chinese wind farm. The bi-LSTM method makes accurate predictions using 7200 gathered data points for training and 1800 data points for testing expectations.

IEEE 39-bus power system.
Meanwhile, the wind power data was updated by one second, and the prediction period was updated by one minute. Before an emergency, the uncertainty of wind power and electric vehicle vehicles is measured and revised for all case studies.
Generator trip
With emphasis on the deviation brought on by wind power and EVs, the frequency recovery of the T-AUFLS, A-AUFLS, and suggested AUFLS (AUFLS-EV-RO) models is compared. Given the possible influence of the wind power confidence interval, their percentages are calculated at 50%, 70%, and 90% for comparison. The percentages represent AUFLS-EV-RO-50%, 70%, and 90%, respectively, in Fig. 5. This scenario utilizes the window of wind power between 1656 and 1716. In the meantime, the generator attached to the bus-3 journeys at t = 10s under those conditions. Due to tripping, there is a power imbalance of 85 MW or around 26.59% of the present load. At the same time, wind farms generate less electricity because of the unpredictable wind. This results in an abrupt drop in power for the entire system. The wind farm fluctuation results in a maximum generation loss of around 25 MW, as illustrated in Fig. 5. As a result, the power imbalance approaches 110 MW.
Properly managing shedding queues remains vital because of anticipated wind power levels to mitigate power shortfalls. An example of shedding queue operations can be observed at Electric Vehicle charging stations. PC EV, SOC, and \(\:{\text{P}}_{\text{n}\text{,}\text{k}\text{,0}}^{\text{\:EV}}\text{}\). EV and Tcharge /Tdischarge values are organising factors to schedule EVs in comfort-based operations (Table 2). According to the algorithm, the 62nd EV receives the top position in the queue because it demonstrates high QEV alongside good SOC. These analytical factors sometimes show indirect relationships between each other. The 705th EV holds a priority position midway through the queue with a QEV of 0.669 and a zero \(\:{\text{P}}_{\text{n}\text{,}\text{k}\text{,0}}^{\text{\:EV}}\text{}\).EV” power level. This technique optimizes system efficiency through user behaviour prediction and continuous record updates to the charging station’s database. The 151st EV has a QEV value of 0.667 yet remains in charging because its accumulated discharge time forces it toward the rear of the queue. The software logic positions EVs according to higher QEV and SOC priorities to effectively manage queue assignments.
Figure 5 shows that T-AUFLS mode triggered the first trip at t = 11.04s, followed by t = 11.42s, and finally at t = 12.20s, resulting in load shedding events of 19.97 MW, 20 MW, and 15.99 MW, respectively. The system undergoes dual intentional tripping events occurring at 15.00s and 35.00s to support rated frequency recovery by reducing the system load by 6.39 MW during each event. A total of 68.72 MW of equipment load gets switched off during the period shown in Fig. 6. A total of 87.87 MW of load is shed through A-AUFLS mode with three separate tripping events at 16.89 MW (t = 11.43s), 39.44 MW (t = 11.9s), and 22.52 MW (t = 13.19s) as shown in Fig. 5. A supplementary tripping unit activates with a 9.01 MW load shedding to achieve frequency restoration matching previous events.
Properly including EVs in the system decreases the number of scheduled power interruptions. Research shows that AUFLS-EV-RO-50% mode effectively generates 56.64 MW EV power while maintaining power delivery at 43.04 MW below the supply level. During A-AUFLS and T-AUFLS operations, the system suffered 87.87 MW and 68.74 MW of load shedding, but AUFLS-EV-RO-50% reduced these figures to 43.04 MW and 56.64 MW, respectively. The combined power output of 99.68 MW from T = (43.04 + 56.64) MW obtains better frequency stability by reducing actual power deficits from 110 MW.

Frequency response in Case I.

Load shedding in Case I.
The fundamental function of the different confidence levels, including 50%, 70%, and 90%, must be acknowledged. The proposed model uses contrasting confidence levels to produce decisions with an increased knowledge base. The AUFLS-EV-RO-50% control mode executes three tripping stages with load shedding levels set at 11.50 MW, 22.55 MW and 9.00 MW. EMP dispatches 45.48 MW of load shedding across multiple events during the AUFLS-EV-RO-70% configuration. Three ensuing events shed a total of 45.48 MW of load, including 11.50 MW, 22.51 MW, and 9.00 MW shedding rounds. AUFLS-EV-RO-90% enables a 48.90 MW complete reduction of electrical load. Results from simulation models indicate that improved forecasting confidence creates increased opportunities for load shedding because AUFLS-EV-RO-70% and AUFLS-EV-RO-90% modes were specifically built for handling different wind power forecasting scenarios. The curves within specific confidence intervals demonstrate declining gaps according to data in Fig. 5. Minor changes in confidence level lower bounds result in different load shedding levels where 50% equals 32.52 MW, 70% brings 29.08 MW, and 90% provides 25.66 MW total reduction.
Prediction conditions
Table 3 compares real wind power, model predictions, and confidence intervals over different time intervals. It shows how the real wind power values align with the model’s predictions within varying confidence levels (50%, 70%, and 90%). During 0–10 s, the real wind power slightly exceeds the prediction but remains within all confidence intervals, highlighting the model’s reliability. In 20–30 s, the real and predicted values align closely, indicating high accuracy. Similarly, at 50–60 s, the prediction slightly overestimates the real wind power but stays within the broader confidence intervals, showcasing the model’s robustness in capturing uncertainties. The table validates the model’s effectiveness, with real wind power consistently falling within the expected confidence bounds.
Again, set a generator at bus-3, offline at \(\:t=10s\), and this causes wind power loss of \(\:21.30\:MW\) during an emergency. The total power loss of generation is 106.30 MW. The frequency recovery, in this case, is shown in Fig. 7. Here, the frequencies of T-AUFLS, A-AUFLS, AUFLS-EV-RO-50%, AUFLS-EV-RO-70%, and AUFLS-EV-RO-90% reach steadily as 49.54 Hz, \(\:49.86\:Hz,\:50.02\:Hz,\:50.04\:Hz\), and \(\:50.06\:Hz\). The peak of frequency caused by our model even reaches \(\:50.75\:Hz\), which may trigger the action of high-frequency protection.

System frequency in case II.
Figure 8 displays the recorded load reductions for T-AUFLS, A-AUFLS, AUFLS-EV-RO-50%, AUFLS-EV-RO-70% and AUFLS-EV-RO-90% at 78.31 MW, 117.16 MW, 79.76 MW, 81.31 MW, and 83.46 MW respectively. The proposed method exhibits reliable performance in addressing this implementation case. When the confidence level increases, the system performance displays enhanced robustness metrics. The enhanced resilience of our model comes from its engineered solution, which remains stable when facing extreme wind power fluctuations that include minimum operating conditions. Electric power systems achieve better robustness levels when operating with low-bound conditions.

Load shedding in case II.
Accordingly, the importance of confidence level and interval selection is verified. When applied to the real-world power system, the middle confidence level is suggested if the dispatcher wants to take a little risk of high frequency and a better performance in a low-frequency event. Second, a low confidence level is recommended if the high-frequency risk is completely avoided with good performance during frequency recovery. In that case, the lower bound of wind power we restricted should be replaced as the prediction value.

The amount of plug-in/out EVs in AUFLS in a resident district (in initial time, there are 1000 EVs).
The variabilities of EV charging stations
-
Estimating Variabilities in Commuting.
Researchers used a transportation simulation to estimate the EV charging station occupancy. The simulation area comprises 29 buses and 49 lines across residential zones and commercial and office regions analyzed in [28]. The Roulette method decides which points are the beginning and end marks for each EV driving route. The simulation begins with an initial EV charging station presence of 1000 or 2000 vehicles between two experimental scenarios. The simulation section uses the Monte Carlo approach to complete 5000 different runs, which help forecast EV counting changes at these stations. Additional specifics are provided in [28]. Figures 8 and 9 diagrams display EV quantity variations using different-coloured confidence intervals. A numerical scale representing the EV condition memetic EV plug-ins with value ‘1’ and EV plug-outs with value ‘-1’. Statistics show EV departure rates at charging stations decrease throughout the morning peak period. An increase in entering EV volumes into stations models an increase in exiting EVs, as shown in Figs. 10 and 11.
-
Amount Uncertainty Estimation.
As Section II outlines, the charging station’s capacity is influenced by the randomness of EV commuting patterns. Thus, the count of EVs at the charging stations is examined during AUFLS. In Fig. 10, with a 50% prediction accuracy for wind power uncertainty, the load shedding for a scenario with 1000 EVs per charging station amounts to 51.18 MW. Conversely, there is no load shedding in scenarios with 2000 EVs per charging station.

Load shedding of different EVs amount in Case III.

Frequency response in Case III.
Increase in load
During t = 10.0 s, the system load grows to 60.0 MW, representing 12.5145% of the total load, but the wind power presence matches exactly with Case I. The system maintains a complete power imbalance of 85 MW. Each of the employed frequencies shown in Fig. 10 presents a distinct frequency value: T-AUFLS measures 49.70 Hz, while A-AUFLS shows 49.666 Hz, and several AUFLS-EV-RO configurations display corresponding frequencies, 49.765 Hz, 49.7777 Hz and 49.777 Hz. The established method successfully brought the system frequency back to its rated state, as verified by these frequency measurements.
In Fig. 12, the T-AUFLS mode results in a load cut of 26.377 MW. In contrast, the A-AUFLS mode triggers load shedding of 16.36 MW. It is important to note that using the proposed model, EVs can completely offset the load shedding. The proposed modes leverage excess energy to counteract the power shortfall in the system, achieving total outputs of 37.133 MW, 38.666 MW, and 38.793 MW, respectively. Additionally, the surplus power from AUFLS-EV-RO at 50.0%, 70.0%, and 90.0% levels can address the imbalance caused by wind power fluctuations. Thus, in scenarios of increasing load, the restoration of standard frequency and the absence of load-shedding events demonstrate the effectiveness of the proposed algorithm.

Load shedding in Case III.
The proposed method demonstrates strong resilience under extreme conditions such as sudden wind power drops and unpredictable EV behavior as shown in Table 4. The integration of confidence-interval-based uncertainty modeling and a reinforcement learning-based AUFLS approach allows for adaptive decision-making, mitigating frequency deviations while minimizing unnecessary load shedding. However, in cases where wind power fluctuations exceed the predefined confidence bounds or when large-scale EV disconnections occur unexpectedly, the system’s ability to maintain stability may be challenged.
In scenarios of extreme wind power loss, the robustness of the model relies on the accuracy of the AKDE-based uncertainty estimation. If the real-time fluctuations surpass the predicted upper and lower confidence intervals, the AUFLS strategy may require additional backup mechanisms, such as battery energy storage systems (BESS) or demand response measures, to maintain grid stability. Similarly, in cases of high EV user variability—where a significant number of EVs unexpectedly disconnect from charging stations—the effectiveness of the shedding queue mechanism could be reduced, necessitating a more dynamic real-time control strategy. Delays in communication between the control center and distributed EV aggregators could impact response times, particularly during rapidly evolving grid conditions. Cybersecurity risks also pose potential challenges, as attacks on smart grid communication networks could interfere with AUFLS operations. To mitigate these concerns, future work will focus on integrating decentralized RL to enhance distributed decision-making among EVs, wind farms, and other grid resources. Additionally, cybersecurity enhancements such as encrypted communication protocols and real-time anomaly detection will be incorporated to improve the reliability of the AUFLS framework under extreme scenarios.
Table 5 provides a summary of the previous AUFLS strategy with a comparison. The proposed scheme’s highlighted characteristics are: (i) It can take into account wind power uncertainty and temporal and consistent generation loss simultaneously; (ii) Flexible EV loads are employed to help maintain frequency stability. Consequently, the redundant approach in the suggested model makes it more realistic.
Conclusion
A robust AUFLS optimization is proposed in this research to ensure frequency dependency in different cases. To analyze the imbalance of energy and frequency, Wind energy unpredictability and EV traffic randomization. The relationship between the variation in the number of EVs and several systems is directly observed under random EV conditions, which I will work on. The reduction in several compounds is observed, along with the reduction in the number of EVs. The non-parametric kernel density estimation method is used for robust optimization, removing excessive frequency deviation and providing power system stability for wind power and EV uncertainty. The remarkable numerical findings show that the suggested method can successfully reduce the frequency variation and distribute the discharging demand across EVs. With low-frequency deviation, the suggested method can recover the frequency faster than the T-AUFLS and A-AUFLS modes. We recommend that the dispatcher use a medium confidence level value and substitute the forecast value for the lower limit constraint of wind power when applying it to the real-world smart grid. By using this method, the flexibility of frequency recovery may be reduced. The performance of the suggested model can be affected by several factors, such as equipment, measurement conditions, cyber-attacks, and communication encryption. Therefore, considering the previously presented results, our future work will investigate the process of the above-mentioned idea.
Future scope
Future extensions of this work will focus on enhancing the robustness and scalability of the proposed AUFLS framework by integrating multi-agent reinforcement learning (MARL) to enable decentralized decision-making among EVs, battery energy storage systems (BESS), and distributed generation units. Additionally, incorporating real-world grid data from utility operators will improve model validation and refine uncertainty estimation in wind power forecasting. Further research will explore cybersecurity aspects to safeguard AUFLS operations from potential cyber threats and adversarial attacks on smart grid communication networks.
The integration of Electric Vehicles EVs in grid frequency stabilization necessitates robust communication between control centres and distributed EV charging stations. However, real-world implementation may introduce cybersecurity threats and communication delays, which could affect the reliability of the proposed approach. To mitigate these challenges, the following strategies are considered:
-
The model can be integrated with encrypted communication channels (e.g., TLS/SSL) to prevent unauthorized access and data tampering.
-
Role-based access control (RBAC) and blockchain-based verification mechanisms can enhance security in EV-grid interactions.
-
The proposed RL-based optimization is designed to handle delayed responses by incorporating a predictive control mechanism. In the event of communication lag, historical data and model-driven forecasting techniques (such as non-parametric Kernel Density Estimation) compensate for missing information.
-
Redundancy measures, including decentralized decision-making at local aggregators, ensure that frequency stabilization remains functional even in case of partial communication failures.
-
Future work will incorporate anomaly detection techniques to identify potential cyber threats in real-time, enhancing the robustness of the AUFLS framework.
The integration of these cybersecurity enhancements ensures that EV-based frequency stabilization remains resilient against cyberattacks and operational uncertainties, making the proposed approach more viable for large-scale deployment.
The integration of advanced forecasting techniques, such as hybrid deep learning models combining transformer networks with AKDE, will also be investigated to improve wind power prediction accuracy, ensuring more reliable frequency regulation in future smart grids.
Data availability
The datasets used and/or analysed during the current study available from the corresponding author on reasonable request.
References
Abrar, S. F., Masood, N. A. & Alam, M. J. An adaptive load shedding methodology for renewable integrated power systems. Heliyon 10(21). (2024).
Nassif, A. B. et al. Improving frequency stability and minimizing load shedding events by adopting grid-Scale energy storage with grid forming inverters. In 2023 IEEE PES Innovative Smart Grid Technologies Latin America (ISGT-LA). IEEE. (2023).
Halevi, Y. & Kottick, D. Optimization of load shedding system. IEEE Trans. Energy Convers. 8 (2), 207–213 (1993).
Rajabdorri, M. et al. Data-driven Estimation of Under Frequency Load Shedding after Outages in Small Power Systems. arXiv preprint arXiv:2312.11389, (2023).
Terzija, V. V. Adaptive underfrequency load shedding based on the magnitude of the disturbance Estimation. IEEE Trans. Power Syst. 21 (3), 1260–1266 (2006).
Abdelwahid, S. et al. Hardware implementation of an automatic adaptive centralized underfrequency load shedding scheme. IEEE Trans. Power Delivery. 29 (6), 2664–2673 (2014).
Wu, X. et al. Adaptive under-frequency load shedding scheme for power systems with high wind power penetration considering operating regions. IET Generation Transmission Distribution. 16 (21), 4400–4416 (2022).
Tofis, Y., Timotheou, S. & Kyriakides, E. Minimal load shedding using the swing equation. IEEE Trans. Power Syst. 32 (3), 2466–2467 (2016).
Khan, W. et al. Rotor angle stability of a microgrid generator through polynomial approximation based on RFID data collection and deep learning. Sci. Rep. 14 (1), 28342 (2024).
Rafinia, A., Moshtagh, J. & Rezaei, N. Stochastic optimal robust design of a new multi-stage under-frequency load shedding system considering renewable energy sources. Int. J. Electr. Power Energy Syst. 118, 105735 (2020).
Liu, H. et al. Robust under-frequency load shedding with electric vehicles under wind power and commute uncertainties. IEEE Trans. Smart Grid. 13 (5), 3676–3687 (2022).
Golpîra, H. et al. A data-driven under frequency load shedding scheme in power systems. IEEE Trans. Power Syst. 38 (2), 1138–1150 (2022).
Alhelou, H. H. et al. An overview of AUFLS in conventional, modern, and future smart power systems: challenges and opportunities. Electr. Power Syst. Res. 179, 106054 (2020).
Nguyen, B. L. et al. Advanced load shedding for integrated power and energy systems. In 2021 IEEE Electric Ship Technologies Symposium (ESTS). IEEE. (2021).
Rwegasira, D. et al. Load-shedding techniques for microgrids: A comprehensive review. Int. J. Smart Grid Clean. Energy. 8 (3), 341–353 (2019).
Pulendran, S. & Tate, J. E. Energy storage system control for prevention of transient under-frequency load shedding. IEEE Trans. Smart Grid. 8 (2), 927–936 (2015).
Lai, C. Y. & Liu, C. W. A scheme to mitigate generation trip events by ancillary services considering minimal actions of AUFLS. IEEE Trans. Power Syst. 35 (6), 4815–4823 (2020).
Wang, J., Zhang, H. & Zhou, Y. Intelligent under frequency and under voltage load shedding method based on the active participation of smart appliances. IEEE Trans. Smart Grid. 8 (1), 353–361 (2016).
Majdara, A. & Nooshabadi, S. Nonparametric density Estimation using copula transform, bayesian sequential partitioning, and diffusion-based kernel estimator. IEEE Trans. Knowl. Data Eng. 32 (4), 821–826 (2019).
Jahangir, H. et al. Deep learning-based forecasting approach in smart grids with microclustering and bidirectional LSTM network. IEEE Trans. Industr. Electron. 68 (9), 8298–8309 (2020).
Zhou, B. et al. Wind power prediction based on LSTM networks and nonparametric kernel density Estimation. Ieee Access. 7, 165279–165292 (2019).
Shun, T. et al. Charging demand for electric vehicle based on stochastic analysis of trip chain. IET Gen. Transm. Distrib.. 10 (11), 2689–2698 (2016).
Moura, S. J., Stein, J. L. & Fathy, H. K. Battery-health conscious power management in plug-in hybrid electric vehicles via electrochemical modeling and stochastic control. IEEE Trans. Control Syst. Technol. 21 (3), 679–694 (2012).
Neumann, F. MSc Dissertation Thesis MSc in Sustainable Energy Systems. (2017).
Ceja-Gomez, F., Qadri, S. S. & Galiana, F. D. Under-frequency load shedding via integer programming. IEEE Trans. Power Syst. 27 (3), 1387–1394 (2012).
Hong, Y. Y. & Wei, S. F. Multiobjective underfrequency load shedding in an autonomous system using hierarchical genetic algorithms. IEEE Trans. Power Delivery. 25 (3), 1355–1362 (2010).
Amraee, T. et al. Probabilistic under frequency load shedding considering RoCoF relays of distributed generators. IEEE Trans. Power Syst. 33 (4), 3587–3598 (2017).
Funding
This work is supported by Natural Science Foundation of China 62271349.
Author information
Authors and Affiliations
Contributions
Feng Renhai, Wajid Khan, Afshan Tariq, Muhammad Abbas: Conceptualization, Methodology, Software, Visualization, Investigation, Writing- Original draft preparation. Muhammad Zain Yousaf, Abdul Aziz: Data curation, Validation, Supervision, Resources, Writing - Review & Editing. Mohit Bajaj, Mustafa Abdullah, Milkias Berhanu Tuka: Project administration, Supervision, Resources, Writing - Review & Editing.
Corresponding authors
Ethics declarations
Competing interests
The authors declare no competing interests.
Additional information
Publisher’s note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
Open Access This article is licensed under a Creative Commons Attribution-NonCommercial-NoDerivatives 4.0 International License, which permits any non-commercial use, sharing, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons licence, and indicate if you modified the licensed material. You do not have permission under this licence to share adapted material derived from this article or parts of it. The images or other third party material in this article are included in the article’s Creative Commons licence, unless indicated otherwise in a credit line to the material. If material is not included in the article’s Creative Commons licence and your intended use is not permitted by statutory regulation or exceeds the permitted use, you will need to obtain permission directly from the copyright holder. To view a copy of this licence, visit http://creativecommons.org/licenses/by-nc-nd/4.0/.
About this article

Cite this article
Renhai, F., Khan, W., Tariq, A. et al. Adaptive non-parametric kernel density estimation for under-frequency load shedding with electric vehicles and renewable power uncertainty. Sci Rep 15, 11499 (2025). https://doi.org/10.1038/s41598-025-94419-x
Received:
Accepted:
Published:
DOI: https://doi.org/10.1038/s41598-025-94419-x
