
Abstract
Thanks to its flexibility and cost-effectiveness, an unmanned aerial vehicle-mounted base station (UAV-BS) is a promising technology for the upcoming 6G wireless networks. Furthermore, tethered UAVs (T-UAVs), which are powered via a tether by an energy source on the ground, can overcome the limited operation time of UAV-BS networks. Hence, T-UAVs sacrifice their mobility and flexibility to maintain long-lasting flight, unlike untethered UAVs (U-UAVs) that can not fly for more than 30 mins. To exploit the best of each type of UAV, the deployment of both T-UAVs and U-UAVs as aerial base stations is investigated. In this paper, we propose a hybrid system composed of tethered and untethered UAVs. We analyze the system by generating Monte Carlo simulations to find a compromise between the two different types of UAVs. Our results prove that for specific cases, the coexistence of tethered and untethered UAVs improves the performance of the system.
Similar content being viewed by others


Introduction
With rapid advancements in electronics and communication, UAVs, or drones, have seen extensive use in recent decades. They offer high maneuverability, low cost, mobility, quick deployment, and flexibility. These features make them valuable in both military and civilian sectors. At first, UAVs were mainly deployed in hostile areas to lessen pilot casualties. With continued cost reduction and equipment miniaturization, small UAVs are now more available to the general public. As a result, numerous new applications in the civil and commercial domains have arisen and slowly gained popularity. Some common examples include target localization1, traffic monitoring2, precision agriculture3, weather analysis4, surveillance5 and reconnaissance6 as well as coverage.
Among the many applications for UAVs, the exploitation of UAVs to achieve high-speed wireless communication is anticipated to play a significant role in communication systems in the near future thanks to the high probability of establishing a line of sight links. For example, UAVs can serve as flying base stations (BSs) to increase cellular networks’ capacity and maintain wireless coverage and connectivity in the absence of terrestrial BSs. They are particularly utilized in emergency scenarios where the ground cellular infrastructure is constrained or temporarily out of service, as well as in temporary hotspot locations like concerts and sporting events.
However, because of their practical limitations, UAVs were unable to be utilized in place of cellular base stations. The primary design issues with UAV-BSs are the limited batteries and backhaul links, which drastically restrict the flight time of UAVs and the QoS. In an effort to enhance system energy efficiency (EE), some studies optimized the trajectory design of UAVs and the allocation of communication resources such as power, spectrum, and time, to reduce the transmission-related and travelling-related power consumed by UAVs7,8. Additionally, some researchers proposed using more UAVs to increase the system’s available power9.
Battery recharging is another option for dealing with the low power problem. Some works take into account the continuous replenishment of energy derived from the environment, such as solar energy10. However, renewable energy is unstable and subject to changes in the environment. Additionally, due to the relatively small size of UAVs, it is technically impractical to harvest enough energy for UAVs to operate continuously using solar panels. Other works focus on wireless charging techniques such as recharging UAV batteries using a laser beam while they are in flight.11. Unfortunately, this method is unstable and extremely susceptible to environmental factors like rain, dust, and other conditions. Added to that, a line-of-sight link is required.
In order to address the aforementioned drawback, T-UAVs are introduced to provide a steady, trustworthy, and long-lasting aerial base stations. A T-UAV is a type of UAV that receives data and power over a cable from a ground station (GS). The cable can meet the two primary technological concerns by providing a consistent power supply and a reliable wired backhaul link with high data rates.12 provides a summary of the T-UAV specifications implemented by numerous companies. It demonstrates that T-UAVs can fly for up to an indefinite period of time.
However, T-UAV has also its own limitations mainly caused by the tether. The UAV is no longer flexible and its mobility is restrained in a specific hovering area. This area is determined by the maximum tether length and the minimum inclination angle. The minimum inclination angle is a security angle aim to avoid tangling with the surrounding buildings. The tether length and inclination angle significantly affect the stability, mobility, and coverage of T-UAVs. Longer tethers allow for greater movement and higher altitudes, enhancing coverage, but they also increase instability due to swinging motions in windy conditions. Shorter tethers improve stability but limit range and coverage. Similarly, a shallow inclination angle exposes the UAV to lateral forces, causing swaying, while a steeper angle improves stability but may lead to pitching. In high-wind or turbulent environments, shorter tethers and steeper angles offer better stability, though they reduce coverage, while longer tethers and flatter angles improve range but introduce stability challenges. Balancing these parameters and making dynamic adjustments based on environmental conditions is key to optimizing T-UAV performance. Moreover, the deployment of T-UAV is directly dependent on the availability of rooftops that have the ability of hosting the GSs. Such types of rooftops are called accessible rooftops and described in details in13.
To emphasize the efficiency of T-UAV systems, we study in14 a large scale TUAV deployment in wireless communication system and analyse the coverage performance of the system. In15, we investigate three distinct T-UAV deployment strategies. Based on our findings, we deduce that the T-UAVs’ ability to attach and detach provides a significant advantage, striking a favorable balance between coverage performance and energy efficiency.
Comparing T-UAV and U-UAV systems, authors in13 show that, despite mobility limits caused by the tether, T-UAV systems offer certain prospective benefits over U-UAVs. They also propose different use cases of T-UAVs. In addition,16 compare the performance of various types of UAV charging technique for a data collection mission and prove that laser-powered UAVs are the best option for such missions. Combining T-UAVs and U-UAVs in one system, authors in17 described a novel UAV-based post-disaster communication system in which U-UAVs provide cellular service in disaster-affected areas and T-UAVs provide backhaul and manage the aerial base station (ABS) network. The T-UAV connects the entire flying network to the core network using hybrid FSO/RF links. It also houses a central controller responsible for managing and coordinating the flying cellular network. Meanwhile, the U-UAVs primarily form the flying cellular network, delivering connectivity to first responders and affected users in the disaster-stricken area.
Since the key characteristic of U-UAV is unconstrained mobility (which is the main constraint of T-UAV), while the key characteristic of T-UAV is unlimited flight time (which is the main constraint of U-UAV), combining the two types of UAVs in one system could be a great idea to exploit the best of each type. In this paper, we propose a hybrid system of tethered and untethered UAVs in order to take advantage of each type of UAV. Unlike the UAV-based post-disaster communication system proposed in [14], our proposed system utilizes both UAV types to serve the users and enhance the coverage performance of the network. For the tethered UAV (TUAV), the backhaul connection is provided through the tether, ensuring stable and high-bandwidth communication. For the untethered UAV (UUAV), the backhaul is established via a wireless gateway, such as a nearby terrestrial base station (TBS). Before going into the system’s details, we first go over the advantages and challenges of UAVs in the following subsection.
Advantages and challenges of T-UAV system and U-UAV system
The main issue of UAVs’ deployment comes from their limited size, weight, and power, which may limit their endurance, computation, and communication capabilities. Generally, UAVs can hover for 30 to 40 minutes. By taking into account the energy used for the payload, communications, and signal processing, the flight time is further shortened. Thus, UAVs are obliged to leave their position to recharge or swap their batteries in the nearest ground station. At that time, there will be no coverage in their covered area till they come back to there places. This will affect the quality of service of the wireless network. As a result, the energy use and battery life of UAVs become a major limitation.
Mechanisms for the operation and deployment of energy-aware UAVs for intelligent energy usage and replenishment are required to address these issues. Utilizing inter-UAV collaboration to enable sequential energy recharging is a viable strategy for energy-aware deployment. For instance, only one UAV is planned to leave the serving area at a time for battery recharge, during which time nearby UAVs temporarily cover the service void. Utilizing a powered drone is another viable strategy where powered drone is used to charge the UAVs on fly thanks to its large capacity battery17. The goal of energy-efficient operation, on the other hand, is to lessen the UAVs’ energy usage. The UAVs’ mobility needs to be carefully managed by accounting for the energy required for each maneuver18.
In order to maximize UAV energy efficiency,19 simultaneously optimizes the UAV trajectory, user transmit power, and the distribution of computation load. This is done in consideration of the service requirements of users. In20, authors use decentralized reinforcement learning algorithm to solve an energy efficiency maximization problem by investigating the multi-UAV trajectory planning.
Note that, in addition to the frequently used energy sources like electric batteries or liquid fuels, there has been growing interest in powering UAVs using wireless power transmission (WPT). For WPT, two charging methods, non-electromagnetic field charging and electromagnetic field (EMF) charging, are used. In particular, the EMF charging wirelessly charges the target battery using electro-magnetic fields. However, due to their poor energy transfer efficiency, these methods are unable to supply enough energy to make up for the UAV’s energy consumption. High-power lasers and photovoltaic (PV) cells are used in non-EMF charging to recharge UAVs. The drawback of employing those techniques for energy transmission is that the performance of the transfer might be severely hampered by inclement weather. Furthermore, because of the UAVs’ erratic position and orientation, the receiver side may experience significant alignment issues. As a result, the PV panel’s ability to capture energy will be drastically lowered or diminished.
Thus, we can admit that all this techniques are unstable and sensitive to the environmental conditions. To ensure more sustainable technology, Tethered UAVs have been introduced. Unlimited autonomy is supported by this type of UAVs. It avoids repetitive recharging and does not necessitate actual landing on a charging station. It can receive a constant power source from a charging station via a connecting wire. Data transfer is efficient and secure thanks to this technology. Copper wires are typically utilized as power supply cables. However, tethered UAV also makes use of optical fiber technologies. Kilowatts of power can be transferred across fiber optic cable. Hence, The two technical issues, short flight time due to insufficient onboard energy and establishing a reliable backhaul link, are resolved by T-UAVs.
Today’s commercially available T-UAVs have demonstrated their ability to withstand severe weather conditions and can remain in the air and function without interruption for days12. It merely has to land at the GS for repair, which is standard practice for terrestrial BSs as well. Longer flight times give T-UAVs the endurance of terrestrial BSs, unlike U-UAVs which can not stay in the air for longer than 30 minutes. The tether length is normally constrained by its weight and falls between 80 and 150 meters. This represent the main limitation of T-UAVs. The drone’s mobility and adaptability to relocation are constrained by the short tether length as well as the surrounding buildings since a minimum inclination angle needs to be introduced as a security angle to avoid tangling with the adjacent buildings.
Due to the existence of a stable energy resource connected to the UAV through the tether, T-UAVs can sustain heavier payloads than U-UAVs. Thus, Compared to U-UAVs, T-UAVs can afford to have more antennas and radio chains, which increases capacity and improves interference control.

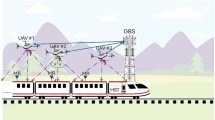
Illustration of the system model
Results
Hybrid T-UAV and U-UAV communication system
Both tethered and untethered UAVs have their own limits and advantages. In contrast to U-UAVs, T-UAVs have a reliable energy source and can fly for extended periods of time. U-UAVs, on the other hand, are more adaptable than T-UAVs, which are constrained by a specific hover region dictated by the length of the tether and the angle of inclination. So, combining them in one system could lead to exploiting both of their benefits in a balanced way. Thus, we suggest a hybrid system composed of tethered and untethered UAVs. The goal is to search for an optimal combination between T-UAVs and U-UAVs so that we can take advantage of the qualities of each type of UAVs and overcome the drawbacks of each one of them.
As shown in Fig. 1, we concentrate on a case in which users are dispersed uniformly among a set of high density hotspots (also known as clusters). Users are continuously in motion so on average the optimal placement of the UAV is in the centre of the cluster. A cluster is modeled as a disk of radius \(R_0\) and the positions of cluster centers are modeled as a homogeneous Poisson point process (HPPP) with density \(\lambda _C\). Depending on the accessibility of buildings, which are also modeled as HPPP with density \(\lambda _b\), T-UAV GS are placed on the closest accessible rooftops to the cluster centers. We deploy only one GS per cluster. A fraction \(\delta\) of clusters are served by T-UAVs while the remaining clusters are served by U-UAVs. We deploy only one UAV per cluster. So, using thinning theorem21, T-UAV positions can be modeled as HPPP with density \(\delta \lambda _C\) while U-UAV positions can be modeled as HPPP with density \((1-\delta ) \lambda _C\). All UAVs are deployed at the same altitude h and transmit with the same power \(\rho _{\textrm{A}}\). They can establish a line of sight (LoS) or a non line of sight (NLoS) links with the users depending on the surrounding environment. The T-UAVs are positioned above the GS and U-UAVs are positioned above the centers of the clusters since it is the optimal placement. T-UAV can be continually available, but U-UAV cannot. Therefore, we introduce a duty-cycle parameter \(A \in \left[ 0; 1\right]\), which is referred to as the “U-UAV availability factor”, to take U-UAV unavailability into consideration while assessing U-UAV systems. In addition, we deploy terrestrial base stations (TBSs) which are modeled as HPPP with density \(\lambda _T\). All TBSs transmit at the same power \(\rho _{\textrm{T}}\). We assume that the altitudes of users and TBSs are equal to zero. This is commonly assumed in literature to highlight the affect of ABS altitude. Moreover, ABSs and TBSs are assumed to operate in the same frequency spectrum and thus, they interfere with each other.
We make the assumption that both Air-to-Ground (A2G) and terrestrial links encounter Nakagami-m small-scale fading with distinct parameters. As a result, the probability density function for the channel fading power gains, denoted by G, can be described as follows
where \(\Gamma (m_Q)\) is the Gamma function given by \(\Gamma (m_Q)=\int _{0}^{\infty }x^{m_Q-1} e^{-x} dx\) and \(m_T, m_L, m_N\) are the shape parameters of terrestrial, LoS, and NLoS links, respectively. The received power at the typical user is given by the following formula
where \(D_{Q}\) is the distance from the typical user to the serving BS, \(\alpha _{Q}\) is the pathloss exponent for terrestrial, LoS or NLoS transmissions (\(\alpha _{\textrm{L}} \le \alpha _{\textrm{N}}\)), and \(\eta _{Q}\) is the mean additional loss for terrestrial, LoS or NLoS transmissions (\(\eta _{\textrm{L}} \ge \eta _{\textrm{N}}\)).
We use the Signal-to-Interference plus Noise Ratio (SINR) to evaluate the effectiveness of the downlink connection between a typical user and its serving BS. When a typical user is linked to a BS, the instantaneous downlink SINR at that user is expressed as \(\textrm{SINR}= \frac{P_{Q}}{\sigma ^2+I}\) where \(P_{Q}\) is given in (2), \(\sigma ^2\) is the additive white Gaussian noise power, and I represents the interference power which is equivalent to the cumulative power received from base stations aside from the one serving the user.
To establish the serving BS, we use the strongest average received power association scheme. As a result, having a NLoS ABS closest to the typical user does not imply that it provides the highest average received power. Thus, the serving BS can be either the nearest LoS ABS, the nearest NLoS ABS, or the nearest TBS.
One of the useful performance metrics in wireless communication systems is the coverage probability. It is commonly defined as the probability that the SINR is larger than a predetermined threshold \(\gamma\)
We employ this metric to conduct a thorough evaluation of our system’s performance. Specifically, we use it to investigate and identify the optimal configuration between T-UAVs and U-UAVs. This analysis helps us determine the most effective combination of these two types of UAVs within our system.
Proof of concept
Unless otherwise stated, the parameters shown in Table 1 will be used as the default system settings in this section.

Coverage probability as a function of T-UAV fraction with \(R_0=200m\)

Coverage probability as a function of T-UAV fraction with \(R_0=400m\)
Figure 2 shows the variation of coverage probability with the fraction of deployed T-UAVs for different values of U-UAV’s availability A and with cluster radius \(R_0=200m\). Looking at Fig. 2, We can notice that as A declines, the value of coverage probability also decreases. For A = 0.9 and A=0.8, the coverage probability decreases with the increase of the fraction of deployed T-UAVs. Thus, U-UAVs with large availability factors outperform T-UAVs which are restrained by the GS locations, as well as the maximum length and minimum inclination angle of tethers. For the remaining values of A, the coverage probability is an increasing function. The coverage probability reaches its maximum when all the deployed UAVs are T-UAVs (\(\delta =1\)). So, T-UAVs outperform U-UAVs in terms of coverage performance when the U-UAV availability decreases.
Figure 3 illustrates the variation of coverage probability with the fraction of deployed T-UAVs for different values of U-UAV’s availability A and with cluster radius \(R_0=400m\). For \(A=0.4\) and \(A=0.6\), the coverage probability increases with the increase of T-UAV fraction \(\delta\) and reaches its maximum when all the deployed UAVs are T-UAVs (\(\delta =1\)). So, even without the capability of hovering in the optimal location (above cluster center) due to the tether constraints, T-UAVs provide better coverage than U-UAVs with an availability factor less than 0.6. We also notice that, for \(A=0.9\) and \(A=0.8\), \(\delta\) has optimal values equal to 0.7 and 0.6, respectively. As a result, we can deduce that deploying both types of UAVs provide better coverage performance than deploying just T-UAVs or U-UAVs.

Coverage probability as a function of T-UAV fraction with different UAV heights

Coverage probability as a function of T-UAV fraction with different \(\lambda _C\) values
Figure 4 depicts the variation of the coverage probability for different values of UAV height. For \(h=60m\), the coverage probability slightly declines with the increase of the fraction of deployed T-UAVs. The length of the tether restrains the mobility of the T-UAV so that the U-UAV outperforms it although it is not always available (A=0.8). For h equal or greater than 80m, the coverage probability has an optimal value. Since T-UAVs are always available to serve users, as opposed to U-UAVs, which are temporarily out of service to recharge their batteries, the coverage probability increases with the percentage of deployed T-UAVs. When the coverage probability reaches its peak, it begins to fall. This can be explained by the fact that T-UAVs are inflexible and constrained by the minimum inclination angle and the maximum tether length. It will be unable to position itself in the optimal placement and hence the coverage performance will decrease.
We also investigate the influence of the cluster density \(\lambda _C\) on the coverage performance. In Fig. 5, we can see that the coverage probability decreases with the increase of \(\lambda _C\) regardless of the fraction of deployed T-UAVs. This phenomenon is explained by high interference. With an altitude of 100m, UAVs are more likely to establish a LoS link with users. Thus, the interference significantly rises with the increase in the number of deployed UAVs. This negatively affects the coverage probability.
Methods
We perform 50,000 Monte Carlo iterations on a square area with sides of 80 km to generate the locations of TBSs and ABSs, which are modeled as a PPP with varying densities. Additionally, we generate the location of the typical user who is uniformly distributed within a randomly selected cluster. The serving base station is determined by calculating the received power at the typical user from each type of BS and selecting the one with the highest received power. The interference and the SINR are then computed based on the type of serving BS. The coverage probability is finally determined by comparing the SINR to the predefined threshold. This process is repeated for various combinations of UAVs. The optimal combination is the one that maximizes the network’s coverage probability. It is determined through an exhaustive search over different fractions of T-UAVs and U-UAVs, ensuring that the selected mix maximizes the strengths of both types of UAVs while mitigating their respective limitations.
Challenges and future scenarios
UAV deployment confronts various ongoing challenges that must be overcome for successful and broad adoption. Moreover, The deployment of T-UAVs brings more issues related to the tether that must be solved in order to ensure successful operations. Among these difficulties are the following:
-
Safety considerations: Tethers can be dangerous if not used appropriately. They can endanger persons and items nearby, especially if they are not properly positioned or if the UAV operates in congested locations. Proper safety measures, including clear visibility, tether marking, and keeping safe distances, are critical for mitigating these risks.
-
Tether management: Managing the cable effectively during deployment and operation might be difficult. Tethers can tangle, get caught on obstructions, or impede the UAV’s movement. Ensuring effective tether management strategies, such as the use of spooling systems or intelligent tether control mechanisms, is critical for smooth and safe operations.
-
Weather conditions: T-UAVs can be more vulnerable to weather conditions compared to U-UAVs due to their limited mobility and their connections to tethers. Strong winds, precipitation, or unfavorable weather conditions can all have an impact on the stability and performance of the UAV, hence weather conditions must be considered before deployment and during operation. Researchers are working to enhance UAV stability and wind resistance to enable reliable operation in adverse weather conditions. Advances in materials science have led to the development of lightweight, high-strength materials, such as carbon fiber composites, which reduce tether weight while improving both strength and durability. Moreover, specialized coatings and treatments for tethers now provide resistance to environmental factors such as moisture, UV radiation, and extreme temperatures, ensuring greater reliability in harsh weather. These innovations not only enhance the performance of tethered UAVs but also expand their operational capabilities in challenging and demanding environments.
-
Public perception and acceptance: It can be difficult to balance the practical benefits of T-UAVs with public acceptability and visual preferences. T-UAVs may stay in the air for lengthy periods of time. In such instances, the UAV and its tether may become a conspicuous feature on the skyline, potentially affecting the visual composition and perception of the area. Individuals who find T-UAVs visually unpleasant may object to their introduction into public spaces or regions frequented by people.
Other than the challenges caused by tether, the deployment of UAVs confronts other problems, such as:
-
The communication security: The security of UAV communications is made up of two components: information security and navigation security. While transferred data should be secured for user confidentiality, the UAV itself should be protected from potential malicious attacks that could cause a crash or a severe accident that could jeopardize human safety. To ensure the security of UAV systems, advanced signal processing technologies and flight control strategies must be collaboratively created.
-
Autonomy and obstacle avoidance: It is a significant challenge to enable autonomy and obstacle avoidance capabilities in UAVs. Implementing advanced navigation and vision systems that enable the UAV to explore complicated and crowded environments, avoid obstacles, and make autonomous decisions is a hot field of research. Sensor advancements, including radar, lidar, and computer vision, are required to improve the UAV’s capacity to detect and avoid obstacles in real time.
-
Payload capacity: Improving UAV payload capacity is critical for expanding their uses. Propulsion system, aerodynamic, and material improvements can help enhance payload capacity while retaining flying stability and maneuverability.
-
Ethical and legal considerations: UAVs offer various ethical concerns that must be carefully addressed to ensure their acceptable usage in society. Privacy is a major concern because UAVs can collect massive amounts of data, including personal and sensitive information, without people’s knowledge or agreement. Security is another major worry, as UAVs are susceptible to hacking, misuse, and malicious attacks. The possibility of exploiting UAV technology is also a growing issue. While UAVs have many useful applications, such as disaster assistance, agriculture, and infrastructure inspection, they can also be employed for harmful purposes. For example, in military settings, UAVs can be weaponised, creating concerns about accountability, targeting, and the ethics of deploying autonomous systems in warfare. In commercial sectors, using UAVs for mass surveillance or gathering consumer data without proper consent may result in the exploitation of consumers’ personal information for profit.
-
Regulatory frameworks: The regulatory environment for UAVs is evolving to ensure safe and responsible operations. Addressing regulatory challenges, including airspace integration, flight restrictions, privacy concerns, and certification processes, is crucial for enabling the widespread adoption of UAV technology. Promoting innovation while adhering to legal requirements is a tricky balance. Policymakers must collaborate closely with industry stakeholders to ensure that regulations are both strict enough to ensure safety and flexible enough to adapt to technology changes. By addressing these issues, the regulatory environment can pave the way for the responsible integration of UAVs into a variety of applications, while also increasing public trust in this technology.
To address these issues, a multidisciplinary strategy is required, integrating advances in domains such as aerospace engineering, communication, and artificial intelligence. Continued research and collaboration are critical for overcoming these obstacles and realizing the full potential of UAV technology.
Conclusion
In this paper, we discuss the challenges of U-UAVs as well as potential solutions. Then, as an alternative to U-UAVs, we discuss the benefits and drawbacks of T-UAVs. Finally, we present a novel hybrid large-scale UAV-enabled communication system composed of both U-UAVs and T-UAVs to exploit the advantages of both. We run Monto-Carlo simulations to evaluate the performance of the proposed setup. We conclude that, depending on many parameters such as U-UAV availability, cluster radius, and interference, we can find an optimal combination of tethered and untethered UAVs to maximize coverage performance.
Data availibility
The datasets used and/or analysed during the current study available from the corresponding author on reasonable request.
References
Jing, X., Liu, F., Masouros, C. & Zeng, Y. ISAC from the sky: UAV Trajectory design for joint communication and target localization. IEEE Trans. Wirel. Commun. 23, 12857–12872. https://doi.org/10.1109/TWC.2024.3396571 (2024).
Butilă, E. V. & Boboc, R. G. Urban traffic monitoring and analysis using unmanned aerial vehicles (UAVs): A systematic literature review. Remote Sens. 14, 620 (2022).
Aslan, M. F., Durdu, A., Sabanci, K., Ropelewska, E. & Gültekin, S. S. A comprehensive survey of the recent studies with uav for precision agriculture in open fields and greenhouses. Appl. Sci. 12, 1047 (2022).
Dudek, A., Kunstmann, F., Stütz, P. & Hennig, J. Detect and avoid of weather phenomena on-board UAV: Increasing detection capabilities by information fusion. In 2021 IEEE/AIAA 40th Digital Avionics Systems Conference (DASC). 1–7 (IEEE, 2021).
Dağaşan, A. & Karaşan, E. Resilient multi-hop autonomous uav networks with extended lifetime for multi-target surveillance. IEEE Trans. Netw. Serv. Manag. 1–1. https://doi.org/10.1109/TNSM.2025.3528495 (2025).
Wenguang, L. & Zhiming, Z. Intelligent surveillance and reconnaissance mode of police UAV based on grid. In 2021 7th International Symposium on Mechatronics and Industrial Informatics (ISMII). 292–295 (IEEE, 2021).
Sun, C. et al. Energy consumption reduction for UAV trajectory training: A transfer learning approach. arXiv preprint arXiv:2501.11243 (2025).
Zhu, X., Zhai, L., Li, N., Li, Y. & Yang, F. Multi-objective deployment optimization of UAVs for energy-efficient wireless coverage. IEEE Trans. Commun. 72, 3587–3601. https://doi.org/10.1109/TCOMM.2024.3356795 (2024).
Wu, Q., Zeng, Y. & Zhang, R. Joint trajectory and communication design for multi-UAV enabled wireless networks. IEEE Trans. Wirel. Commun. 17, 2109–2121 (2018).
Sun, Y., Xu, D., Ng, D. W. K., Dai, L. & Schober, R. Optimal 3D-trajectory design and resource allocation for solar-powered UAV communication systems. IEEE Trans. Commun. 67, 4281–4298. https://doi.org/10.1109/TCOMM.2019.2900630 (2019).
Lahmeri, M.-A., Kishk, M. A. & Alouini, M.-S. Stochastic geometry-based analysis of airborne base stations with laser-powered UAVs. IEEE Commun. Lett. 24, 173–177. https://doi.org/10.1109/LCOMM.2019.2947039 (2020).
Kishk, M. A., Bader, A. & Alouini, M.-S. On the 3-D placement of airborne base stations using tethered UAVs. IEEE Trans. Commun. 68, 5202–5215 (2020).
Kishk, M., Bader, A. & Alouini, M.-S. Aerial base station deployment in 6G cellular networks using tethered drones: The mobility and endurance tradeoff. IEEE Veh. Technol. Mag. 15, 103–111 (2020).
Khemiri, S., Kishk, M. A. & Alouini, M.-S. Coverage analysis of tethered uav-assisted large-scale cellular networks. IEEE Trans. Aerosp. Electron. Syst. 59, 7890–7907. https://doi.org/10.1109/TAES.2023.3300296 (2023).
Khemiri, S., Kishk, M. A. & Alouini, M.-S. Tethered UAV deployment strategies: The coverage and energy efficiency trade-off. IEEE Open J. Commun. Soc. 4, 2561–2577. https://doi.org/10.1109/OJCOMS.2023.3323676 (2023).
Lahmeri, M.-A., Kishk, M. A. & Alouini, M.-S. Charging techniques for UAV-assisted data collection: Is laser power beaming the answer? IIEEE Commun. Mag. 60, 50–56 (2022).
Selim, M. Y. & Kamal, A. E. Post-disaster 4G/5G network rehabilitation using drones: Solving battery and backhaul issues. In 2018 IEEE Globecom Workshops (GC Wkshps). 1–6. https://doi.org/10.1109/GLOCOMW.2018.8644135 (2018).
Zeng, Y., Zhang, R. & Lim, T. J. Wireless communications with unmanned aerial vehicles: Opportunities and challenges. IEEE Commun. Mag. 54, 36–42 (2016).
Abrar, M. et al. Energy efficient UAV-enabled mobile edge computing for IoT devices: A review. IEEE Access (2021).
Zhao, C. et al. Multi-UAV trajectory planning for energy-efficient content coverage: A decentralized learning-based approach. IEEE J. Sel. Areas Commun. 39, 3193–3207 (2021).
Haenggi, M. Stochastic Geometry for Wireless Networks (Cambridge University Press, 2012).
Acknowledgements
This work was funded in part by the Center of Excellence for NEOM Research at KAUST.
Author information
Authors and Affiliations
Contributions
Safa Khemiri wrote the manuscript and ran all the simulations. Mustafa Kishk and Mohamed-Slim Alouini reviewed the manuscript and gave comments for further improvements.
Corresponding author
Ethics declarations
Competing interests
The authors declare no competing interests.
Additional information
Publisher’s note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
Open Access This article is licensed under a Creative Commons Attribution-NonCommercial-NoDerivatives 4.0 International License, which permits any non-commercial use, sharing, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons licence, and indicate if you modified the licensed material. You do not have permission under this licence to share adapted material derived from this article or parts of it. The images or other third party material in this article are included in the article’s Creative Commons licence, unless indicated otherwise in a credit line to the material. If material is not included in the article’s Creative Commons licence and your intended use is not permitted by statutory regulation or exceeds the permitted use, you will need to obtain permission directly from the copyright holder. To view a copy of this licence, visit http://creativecommons.org/licenses/by-nc-nd/4.0/.
About this article

Cite this article
Khemiri, S., Kishk, M.A. & Alouini, MS. Exploiting tethered and untethered UAVs: a hybrid aerial communication system. Sci Rep 15, 15882 (2025). https://doi.org/10.1038/s41598-025-99761-8
Received:
Accepted:
Published:
Version of record:
DOI: https://doi.org/10.1038/s41598-025-99761-8
