
Abstract
This paper proceeds from professional learning community for graduate students that promotes individual growth as well as team growth. The professional learning community is characterized of asymmetric study willingness, which means that study among community members is not necessarily bidirectional, but can also be unidirectional. But there is a research gap in the modeling of asymmetric study willingness. Development of general artificial intelligence provides some implications for the research of professional learning community, and this paper introduces a CAIDD (Continuous Action Iterated Double-layer Dilemma) model to simulate the asymmetric study willingness of community members. Within the professional learning community, crucial members can better facilitate the communication network and improve the group dynamics of the community. So we divide the communication network within the professional learning community into two layers and put forwards a double-layer communication network. Teacher leaders form the upper layer while graduate students form the second layer of the network. To improve the effectiveness, a guiding mechanism of LQR(linear quadratic regulator) is introduced to guide the upper layer of teachers. The Lyapunov function is designed to prove the effectiveness of the proposed model and the guiding mechanism. And this is complemented by an in-depth discussion.
Similar content being viewed by others
Introduction
Information technology, through networks and artificial intelligence, is playing an increasingly important role in education (Flogie and Aberšek, 2022). A considerable literature has grown up around the research of professional learning community (Chamba-Eras et al., 2023; Ramos et al., 2021; Rasheed et al., 2021), and it has also been shaped and influenced by the development of artificial intelligence (Yang et al., 2007). Professional learning community is put forward to describe the combination of individuals with the same vision. It has three big ideas as the concept’s merits, which are focusing on learning rather than teaching, working collaboratively, and focusing on results (DuFour, 2004). To clarify, the first merit of professional learning community is the shift from focus on teaching to focus on learning, which has profound implications for students as well as schools. (Barr and Tagg, 1995) The second merit of professional learning community is the culture of collaboration. Educators recognize that they must cooperate with each other to achieve the purpose of learning for all, and they would create structures to promote the culture of collaboration (Stevenson et al., 2005). The third merit is that result is the important basis for evaluating its effectiveness. Graduate education requires both independent and group learning to create a group of stakeholders who would learn content knowledge as well as be socialized into the chosen discipline (Yao et al., 2017). The professional learning community for graduate students is made up of teachers, graduate students, and sometimes school leaders. characterized of group dynamics, the professional learning community for graduate students functions as an advisory team, because it can provide graduate students with instructions, peer imitation, peer review, and peer critique (Kabes et al., 2010). This paper will focus on the modeling and guiding mechanism of the professional learning community of graduates. Traditionally, it is assumed that learning process within the learning community is bidirectional, meaning that students would learn from each other (Thurman et al., 2009). And the undirected graph is widely utilized to enhance the understanding of learning connections within a community (Kazemi et al., 2024; Li et al., 2017; Qiu et al., 2024a). However, the assumption does not take various influencing factors into account. One research shows that students would choose different study mode based on factors such as personal needs, learning support, environment, marketing, advice and logistics (Bailey et al., 2015). The other research shows that student choice is influenced by six domains of factors:perception, access and opportunity, environment, quality of teachers, course design and graduate success (Shah et al., 2013). Other research indicates that students perceived learning is influenced by instructor and student behavior (Jiang and Ting, 2000). It can be concluded that learning willingness of students is influenced by a complex set of factors and it is the same with the group of graduate students. In other words, the influencing factors of study vary with different graduate students, and study in the learning community may not necessary be bi-directional but can also be unidirectional. The philosophy of professional learning community is that people work together and each member of the community would like to help the other members succeed in daily communications with all stakeholders (Lunenburg, 2010). Teachers, especially experienced and accomplished ones, play a very important role in a professional learning community, and lasting development of the professional learning community must begin with the comprehensive quality of teachers(Lieberman and Pointer Mace, 2009). One research uses the metaphor of a sleeping giant to describe the influence of teachers and power it may exert if aroused(Katzenmeyer and Moller, 2009). Another research indicates that teachers can promote students cognitive processing during group learning because teachers can provide instructions and monitor the learning process (Meloth and Deering, 2014). Teacher leaders can facilitate the communication network within the professional learning community, and they have demonstrated practical capacities to build alliance and networks of various forms, which would engender new ideas and group dynamics (Ackerman and Mackenzie, 2007). Therefore, we can take teachers as leaders of the professional learning community for the reason that teachers can make use of various power besides formal authority, such as expertise, attractive personality, key position in network, and visibility (Bowman, 2004). With profound knowledge and superior skills, the teachers can provide students with necessary guidance, and with the appealing personality and center position, teachers are more influential. Research about the hidden dynamics of the learning community put forward a framework of individual growth and the team growth (Francesca et al., 2010). They point that one function of learning community is helpful for individual development and satisfaction, and second function depends on social network and social dynamics of the learning community (Francesca et al., 2010). Research about teacher-guided peer learning also shows the importance of teachers (Qiu et al., 2023; Qiu et al., 2024b). Therefore, the professional learning community is the source of influence over its members and the community as a whole (Wageman, 1995). Changes in any part of the community would make different on the members. According to the theory of group dynamics, the change of teachers would make a big difference, and the teacher should be guided reasonably to form strong motivation to drive the professional learning community forward. Therefore, this paper would choose teachers as the crucial individuals and form the upper layer of the communication network, and students would form the second layer of the communication network. This paper focuses on the professional learning community for graduate students and delves into how to improve the community’s group dynamics. Evolutionary game theory provides a valuable perspective for explaining interactions of community members (Jin et al., 2024a, b, 2022). Authors in (Chen et al., 2023) consider several prediction methods to verify whether the target user’s social action status is controlled. In (Wang et al., 2022), an efficient feedback control mechanism was proposed to restrain the negative information spread with minimal system expenses by devising and performing three synergetic intervention strategies. Authors in (Lin et al., 2021) proposed the optimal control strategies that can effectively inhibit the diffusion of fraud information while incurring the smallest total cost. Based on this and the fact that study of graduate students is influenced by a complex set of factors, this paper proposes a model to simulate the asymmetric study willingness of members in the learning community. Teachers are the leaders and they can facilitate communication network within learning community. In this paper, LQR is employed to induct the upper-level of teachers to improve the group dynamics and drive graduate students forward.
Contributions of this paper are as follows:
-
(1)
The CAIDD model is proposed to describe the asymmetric study willingness of members within the professional learning community for graduate students.
-
(2)
A double-layer network is proposed to simulate the communication network within the professional learning community for graduate students.
-
(3)
LQR is introduced to guide teachers of the upper layer to improve the effectiveness of the professional learning community, and the Lyapunov function is designed to prove the effectiveness of the proposed model and mechanism.
Chapters of this paper are organized as follows: We present related research background in Section I. In Section II, we present the fundamental concepts of traditional model of CAIPD (Ranjbar-Sahraei et al., 2014) and Lyapunov function and LQR. The modelling of asymmetric study willingness and double-layer communication network, the induction strategy is proposed in section III. In section IV, the convergence analysis based on the Lyapunov function is proposed. In section V, the simulation is designed to prove the effectiveness of CAIDD. VI provides an in-depth discussion.Section VII draws the conclusion.
Background
This section provides an overview of the concepts of the theories used in this paper, including the CAIPD model, LQR, and Lyapunov Function.
The CAIPD model
In real learning environments, graduate learning communities are influenced by multiple factors, including their members and the learning environment, which indicates that quantitative analysis of such communities poses certain challenges. The CAIDD model we have constructed is an abstraction and simplification of graduate learning communities, designed to simulate how students within these networks achieve self-transcendence and improvement by learning from other members. By isolating confounding factors, the model succinctly captures the core of the issue, facilitating in-depth research and analysis.
Communications and interactions among graduate students can be described as a directed graph G = (V, M), where G is the communication network within the graduate team. All of the community members are abstracted as nodes and labelled as a number in V = {v1, v2, …, vN}. We use a adjacency matrix MM×N = [mij], where mij ∈ {0, 1}, to describe whether community member i would learn from community member j. When mij = 1, it means that community member i would learn from community member j. When mij = 0, it means that community member i would maintain his/her own learning strategy and would not imitate the others. wii is used to describe the diagonal elements in the matrix of mij. Since the diagonal elements refers to influence of community member i on himself/herself, all the diagonal elements are set to 0. zi is used to describe the learning strategy of community member i. During the communications and interactions with the neighbors, community member i will pay cost czi as well as get benefit bzi. Therefore, we use a fitness function F(zi) to describe the learning strategy of graduate student i.
where the number of neighbors of vi is indicated by deg[vi].
With equation (1), the difference of learning strategy between community member i and community member j can be calculated as follows:
The CAIPD model assumes that community members would adopt imitation dynamics and adopt their neighbors’ learning strategies in proportion to fitness. The bigger the difference between community member i and community member j, the more likely they learn from each other. We use pij to describe the learning intensity, which can also be called study willingness. In other words, the community member i is more likely to learn the others’ learning strategy when the value of pij is high, while the community member tends to maintain his/her own learning strategy when the value of pij is low. Then, the learning intensity of community member j by community member i is represented by pij and defined as pij = sigmoid(β(ΔFji)).The value of pij ranges from 0 to 1. Based on this, the ith community member gets his/her own learning strategy as:
where k represents the iteration number.
The learning strategy of the ith community member from his/her neighbors is described as:
The learning strategy evolution law of community member i can be described as:
which means that community member i would improve his/her own learning strategy based on his/her own learning strategy Hi, and learning strategy Ci gained from his/her neighbours.
Essentially, the adaptation law described in eqs. (4 and 5) indicates that when the value of pij is high, the ith community member would imitate neighbours’ strategy, whereas for low values of pij, he/she tends to maintain their own learning strategy.
Assuming k to be infinitesimal, the Taylor expansion is applied, it can be derived:
When the value of \({\dot{z}}_{i}(t)\) tends to be stable, it means that learning process of community member i has been finished.
Introducing the Laplacian Matrix, the dynamic system can be written as:
where
Lyapunov function
The stability of dynamic systems under different contexts is often conducted by using Lyapunov, Gershgorin, or Jacobian analysis. In traditional methods, calculating each element of the Jacobian matrix requires taking the derivative of the function, resulting in a computational complexity proportional to n2, where n is the number of individuals. This implies that in the context of large-scale complex networks, the computation of the Jacobian matrix becomes exceedingly intricate. The Lyapunov function is an effective method to analyze the convergence of evolutionary dynamics in complex networks. Therefore, this paper adopts the Lyapunov function as the method.
The evolution of the dynamic system over time can be described as follows:
where z(t) represents the state of the dynamic system at time t. f(t, z)is a continuous dynamic function of the system and the initial state of the dynamic system is z0 = z(t0).
Asymptotic stability: Let z0 and ze be the initial and equilibrium states of the system, respectively. Suppose that C is stable in the sense of Lyapunov, and the initial state of the system can be infinitely close to ze from z0, that is, it satisfies:
The equilibrium state xe is called asymptotically stable. Lyapunov’s Direct Method does not need to solve the state equation and directly judges the stability of the equilibrium state by using the sign characteristics of the Lyapunov function f(t, z), which represents the generalized energy and its derivative \(\dot{f}(t,z)\) with respect to time. It provides a general method to judge the stability of all systems.
Linear quadratic regulator
Within the domain of Linear Quadratic Tracking (LQT), the objective entails the regulation of a dynamical system structured to trace a designated reference signal \(\bar{y}\), as formulated by:
where z represents the internal state vector, \(\bar{y}\) signifies the system’s output, and \(z\left({t}_{0}\right)={z}_{0}\) stands as the initial state. To address this quandary, the subsequent augmented system is introduced, encompassing the dynamic traits of both the primary and tracker dynamics:
with
and \(\tilde{x}={[x,z]}^{\top }\). In order to encompass the resulting tracking discrepancy, the subsequent cost function is formulated:
with
where A is the augmented state cost matrix, and Q and R represent the state and input cost matrices, respectively. The primary objective lies in the determination of u = u⋆ in a manner that facilitates the minimization of the cost function delineated in Equation 5. The optimal induction strategy can be achieved via the utilization of u⋆(t) = K1(t) × (t) + K2(t)z(t).
under the constraint of the system dynamics
LQR can be used to obtain the optimal control law of state linear feedback, which occupies a very important position in modern control theory. Linear quadratic (LQ) performance metrics are easy to analyze, calculate and process.
For continuous-time linear stationary systems:
Select the quadratic performance indicator function
where the weighted arrays Q and R are used to balance the weights of the state and output variables, and Q is a semi-positive definite matrix and R is a positive definite array. If the system is fully controllable, according to the LQR optimal control it is known that the optimal controller that minimises the performance index at this point is
where the matrix P is a solution of the following Riccati equation.
By iteratively solving the discrete-time Riccati equation from the end backward, you can obtain P0, P1, …, PN−1. Then, the gain matrix Kt at each step can be calculated as:
The final control law is:
Problem statement
This section proposes CAIDD, including Asymmetric study willingness, Double-layer network of the professional learning community, and guiding mechanism of the upper layer.
Asymmetric study willingness
Traditionally, communication topology of the learning community is un-directed, which means that the community members will learn from each other. However, the traditional model ignores that study willingness among community members is different. In other words, study relationships among community members are asymmetric, which indicates that study relationships of community members are not necessarily bi-directional but can also be unidirectional. Students’ study willingness is influenced by a complex set of factors, such as needs, personalities, habits, and preferences. Community members would learn from the other one if he has strong study willingness, and he/she would not imitate if he/she have very weak or no study willingness. Therefore, it is necessary to introduce a directed graph to simulate the study dynamics of the classroom.
For example, Fig. 1 provides an example of study relationship in a communication network composed of 7 community members. Since each community member has different study willingness, the study relationships among the community members are not directed. In Fig. 1, arrows are used to indicate the direction of study relationship. The green bi-directional arrows indicate that the study between the two community members is mutual, and they would learn from and imitate each other. The unidirectional blue edges means that the study relationship is one-way. To be specifically, the study relationship between A and F is bi-directional, which means that student A would study from student F and student F would also study from student A. But the study relationship between student A and student G is unidirectional, which means that student would study from student G, but student G would not study from student A.

Example of the asymmetric study willingness in a communication network.
Double-layer network of the professional learning community
According to the theory of group dynamics, all members of the professional learning community would exert influence on themselves as well as on the whole community, but crucial members, such as teachers, would have bigger influence on the whole community.
To improve the effectiveness of professional learning community, we divide its communication network into double-layer network. Teachers, who can be taken as leaders of the learning community, form the upper layer of the network and graduate students form the second-layer of the network.
Figure 2 shows the double-layer communication network within the professional learning community. The blue upper layer is used to represent teachers of the community, while the second green layer is used to represent the graduate students. The community members would not only learn from other members in the same layer, they would also learn from members in the other layer. And the study relationship is determined by the study's willingness. We use arrows to show study relationship between community members. The red nodes are controlled teachers of the upper layer. All teachers in the upper layer are guided by the strategy of LQR and guided to the expected level. The black nodes are graduate students, and they would be driven by teachers of the upper layer.

Double-layer communication network withinthe professional learning community with LQR.
Guiding mechanism of the upper layer
Teachers are the leading roles in the professional learning community, and the change of teachers would make big difference on the whole community. Therefore, the teachers should be guided reasonably to improve the effectiveness and the group dynamics of the community. Specifically, this study introduces LQR controller to provide effective guidance to the upper-layer network. Through this guidance, the upper layer of teachers drive the second layer of students and pushes the whole team towards the target level. We find that the double-layer network must be in a state of strongly balanced graph to ensure that the level of individual cooperation within the network converges at the target value.
CAIDD model
The paper designs the CAIDD model as an improvement of the CAIPD model, and it aims to maintain a strongly balanced state of the communication network.
Compared with traditional prisoner’s dilemma, which presents a limited choice between complete cooperation or betrayal, the CAIDD model expands the range of possible action space. This continuous action space allows community members to choose the value within possible action, providing a more realistic approach than a binary choice. The CAIDD model continues to employ this method. yi is introduced to describe the learning state of community members and the value of yi ranges from 0 to 1. yi = 0 means that community members i would not imitate the others while yi = 1 means that community members i would imitate from others.
The state of the community members i is denoted by \(Y={[{y}_{1},{y}_{2},\ldots ,{y}_{N}]}^{T}\), where yi ranges from 0 and 1. In this model, the cost caused by adjacent community members is yis, while benefit brought by the others is yjq, where q > s. We use a fitness function to describe the total benefit of the community members i as follows:
where deg[vi] represents the number of community members vi. The function that quantifies the difference in fitness between community member i and community member j is given by the following expression: ΔHji = Dj(z) − Di(z). Then, the imitation intensity of community member j by community member i is described as gij and defined by a sigmoid function as gij = sigmoid(β(ΔHji)). The value of pij ranges from 0 to 1.
The CAIDD model establishes necessary learning links by utilizing one of the strongly connected graphs within the network. A directed graph G(V, M) is established based on the individual’s study willingness. Within this graph G, the weight of the link is represented by ρij, which can be expressed as:
where j is not equal to i.
In each iteration of the CAIDD model, weights are depended on the state of their connected community member. At the same time, the unknown nonlinear should be considered. During the kth iteration, ηi is used to describe the weight, which is the sum of the outgoing links originated from community member i, and ξi is used to describe the sum of incoming links directed towards community member i. Both ηi and ξi are calculated using equation (25). Some incoming links of community member i are made to be adjustable, and the associated weights of these incoming links are denoted as Uji. In equation (26), \({\tilde{R}}_{i}\) is defined as the difference between incoming and outgoing links of community member i. This process ensures the network strongly balanced.
Next, the value of \({\tilde{R}}_{i}\) is allocated to Uji. When \({\tilde{R}}_{i}\) is positive, we increase the weight of an adjustable link towards 1; conversely, if it is negative, it is reduced towards 0. This allocation continues until the weight of the adjustable link reaches its maximum or minimum threshold, respectively. In the event that \({\tilde{R}}_{i}\) is non-zero, the surplus is distributed to the other remaining adjustable links, incrementing their weights up to their respective limits. This distribution process is attractively applied until such time that \({\tilde{R}}_{i}\) is depleted to zero. The revised weights of the adjustable links in the incoming links of graduated student i following assignments are denoted by \({\tilde{U}}_{ji}\).
Throughout the kth iteration, we ensure the network remains strongly balanced by dynamically adjusting the weights of the adjustable links while ensuring that the weights of the necessary links are affected by the state of the graduate student.
Following each cycle of iteration, the Lij is defined as:
To influence the evolution in a network following the CAIDD model, L≤N controlled signals, which are described as u1, u2, …, uL, are introduced to affect the behavior of L controlled teachers, who are described as y1, y2, …, yL. The signals are from the external source, such as the government, the environment or distributed leaders outside the network. Formally, considering the CAIDD model \(\dot{{\boldsymbol{y}}}=-{{\mathcal{L}}}_{k}{\boldsymbol{y}}\) is incorporated as
where \({\boldsymbol{u}}=\left[{u}_{1},{u}_{2},\ldots ,{u}_{L}\right]\) is a vector of controlled signals, and B means that the controlled signals exert influences on the controlled teachers.
Convergence analysis
In this section, we utilize the Lyapunov method to illustrate the convergence of the network, which substantiates the convergence of the CAIDD model.
The concept of Lyapunov stability is integral to the analysis of dynamical systems, focusing on the assessment of a system’s equilibrium state’s stability. Central to this theory is the construction of an energy function, referred to as the Lyapunov function, which is used to evaluate the system’s stability. A critical characteristic of the Lyapunov function is that it should exhibit a derivative that is negative-definite when considering the trajectories of the system’s states. The attribute underscores the temporal dynamics of the system, where there is a progressive decrement in its energy profile. This indicates the decline of a systemic in energy, which transpires as time unfolds.
The state of the community member, denoted by y, is the function of time t. The function V(y(t)) represents the Lyapunov function of the dynamic system.
The following two properties must be satisfied for the Lyapunov function:
-
The Lyapunov function V(y(t)) is non-negative for all y, expressed as V(y(t)) ≥ 0.
-
As the state of the system evolves, the Lyapunov function V(y(t)) either diminishes or keeps unchanged, with derivative \(\dot{V}(y(t))\le 0\) being less than or equal to zero for all y.
In the context of Lyapunov’s theorem for stability assessment, the presence of a Lyapunov function V(z(t)) that satisfies the condition \(\dot{V}(z(t))\le 0\) for all non-zero states z is indicative of an asymptotically stable system.
In a strongly connected network with a constant first-order connectivity parameter α (Olfati-Saber and Murray, 2004), it is defined that \(\dot{\alpha }=0\). ei is used to represent the error, where it is calculated as ei = yi − α. The Lyapunov potential function for the CAIDD model is presented in equation (20), with α representing the expected target level.
A state yf is reachable at time t0, if there is a control input ur(t) such that \({{\boldsymbol{y}}}_{f}=\lim_{t\to \infty }{\boldsymbol{y}}\left(t;{t}_{0},{{\boldsymbol{y}}}_{0},{{\boldsymbol{u}}}_{r}(t)\right)\), where \({{\boldsymbol{y}}}_{0}={\boldsymbol{y}}\left({t}_{0}\right)\).
The following theorem showing the reachability of any feasible agreement (i.e., 0 ≤ y⋆ ≤ 1) assuming a single controlled individual is presented.
Theorem 1 (Reachability of Agreements): In the CAIDD model with external influence as expressed in equation (28), any level 0 ≤ y⋆ ≤ 1 an be attained at time t0 from any initial state y0 by applying control input to a single controlled individuaL yc
with ϵ > 0 and error defined as e = yc − y⋆. Then
Proof: We split the control process into two phases. The first is driving the network toward the manifold e = 0 such that the controlled node reaches the agreement value (i.e., yc → y⋆). In the second, the goal is keeping the system on that manifold (i.e., e = 0), by ensuring that \(\dot{e}=0\). Consider the Lyapunov function candidate V = 0.5e2. It can be easily verified that V ≥ 0, except for the case of having the controlled individual reaching an agreement (i.e., e = 0), where V = 0. The derivative of the candidate function is:
Replacing the control input ur of (9) for e ≠ 0 in the above leads to:
where ∣ ⋅ ∣ denotes the absolute value of a scalar. Therefore, according to Lyapunov’s direct method, if ϵ > 0, then in finite time V will attain a value of zero, and thus e = 0. This concludes the first phase of the control process.
In the second phase, the network should be ensured to stay on the manifold e = 0. The derivative of the error signal is computed as:
By replacing the control input ur of (30) for e = 0 in (33), \(\dot{e}={\dot{y}}_{c}=\) 0, and thus guaranteeing that the system stays on the manifold e = 0. Without loss of generality, assume that the controlled individual is the first individual in CAIDD model. Then, the network can be represented in following form:
The new state space matrix is diagonally dominant with non-positive diagonal elements. Moreover, in the graph corresponding to this network, the controlled individual is the sole node without incoming links. Consequently, during the second phase of control, a spanning tree exists in the network with the controlled individual as its root. As a result, the network ultimately reaches an agreement. This indicates that \(\lim_{t\to \infty }{y}_{i}(t)=\lim_{t\to \infty }{y}_{c}(t)={y}^{\star }\), thus concluding the proof.
Simulation
This simulation is based on our research team, which is a typical graduate learning community, focusing more on the process of learning and emphasizing communication and collaboration among community members. Our research team provides a strongly connected network for this study. We have 10 teachers and 40 graduate students in our team. The sense of collaboration is the core of the team. All members of the graduate learning community focus cooperation and they work together through mutual assistance to accomplish learning tasks. Besides, this team provides us with diverse communication and interaction, such as academic discussions, regular teaching meetings, classroom interactions, homework evaluations, and one-on-one tutoring. Therefore, all members of this learning community are initiative and they are willing to learn from others. But the learning relationship may not be bidirectional but can also be undirectional. In other words, the study willingness of the members is asymmetric. The simulation is the simplification and simulation of this problem.
In this section, this paper validates the convergence of the proposed CAIDD model under double-layer network. This study is conducted under ideal conditions,and the initial learning strategy of students is obtained through a questionnaire survey. The questionnaire adopts a 5 point Likert scale, with scores ranging from 0.2 to 1, representing Completely Disagree, Disagree, Neutral, Agree and Completely Agree. 50 participants, including 10 university teachers and 40 graduate students, have participated in this survey. Based on their personal circumstance, the participants completed the questionnaire, thereby obtaining students’ initial learning strategy as presented by Table 1. Additionally, to better simulate real teaching scenarios, this study adopted the Delphi method to determine some parameters. 8 experts in education science were consulted regarding the parameters c and d in equation (2) and the target value of strategies. We take the average of the consultation results from 8 experts as an important basis for setting parameters. Through statistical analysis of the survey data, we ultimately determined the specific parameter valued. c in equation (2) is set to 1, and b is set to 4. The target value of strategies is set to 0.85 In this part, we make two sets of comparative study to verify the effectiveness of the proposed model.
We conducted supplementary experiments on the application of the CAIPD model in educational systems. The results demonstrate that the absence of teacher facilitation in graduate learning communities leads to stagnated academic progression, despite sustained learning motivation among students.
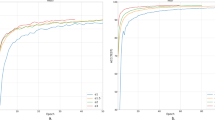
Figure 3 illustrates the comparative study of guiding mechanism of 50 community members when teachers and graduate students are chosen as leaders of the upper layer, respectively. Figure 3a and (b) present the structure and simulation results of the guiding mechanism when 5 teachers are chosen as crucial members and form the upper layer of the network. Fig. 3c, d present the structure and simulation results of the guiding mechanism when 5 graduate students are chosen as leaders of the upper layer. In Fig. 3, red nodes are used to represent leaders of the upper layer while black nodes are used to represent followers of the second layer. As shown in Fig. 3b, we can find that individuals’ strategy have reached the expected level after 1200 times of iteration with 5 teachers as leaders of the learning community. According to Fig. 3d, the individuals do not reach the expected level after the 1200 times of iterations when graduate students are chosen as the leaders of the community. Compared Fig. 3b with (d), we can find that teachers can improve the group dynamics of the community to improve its effectiveness:

a Network of the community with 5 teachers as leaders in upper layer. b Learning evolution process with 5 teachers as leaders in upper layer. c Network of the community with 5 graduate students as leaders in upper layer. d Learning evolution process with 5 students as leaders in upper layer. e Network of the community with no leaders. f Learning evolution process with no leaders.
Figure 4 illustrates the comparative study of guiding mechanism of 50 community members when 3 teachers and 5 teachers are chosen as leaders, respectively. Figure 4a, b present the structure and simulation results of the guiding mechanism when 5 teachers are chosen as crucial members and form the upper layer of the network. Fig. 4c, d present the structure and simulation results of the guiding mechanism when 3 teachers are chosen as leaders of the upper layer. In Fig. 4a, c, red nodes are used to represent teachers of the upper layer, while black nodes are used to represent followers of the second layer. As shown in Fig. 4b, the individuals’ strategy has reached the expected level after 1200 times of iteration with 5 teachers as leaders of the community. According to Fig. 3d, community members do not reach the expected level after 1200 times of iterations with 3 teachers as leaders of the community. Compared Fig. 4b, d, we can draw the conclusion that the number of crucial members makes a big difference on the result. The more the number of crucial community members, the better the learning effects are.

a The normal network with 40 nodes and the professional learning community with 10 nodes. b Induce 10 nodes of professional learning community. c The normal network with 47 nodes and the professional learning community with 3 nodes. d Induce 3 nodes of professional learning community.
Discussion
According to the results of simulations, we can see that the comprehensive quality and number of the crucial members make big difference on learning process and learning effectiveness of professional learning community. This provides enlightenment for the cultivation of graduate students, which indicates that a well-constructed professional learning community is beneficial for the improvement of graduate students. Based on this, some suggestions for cultivating graduate students are given.
Discussion 1
Teachers play important role in professional learning community for graduate students.
This study is consistent with existing research findings. A study shows that selecting critical nodes is helpful to guide the entire system toward a desired state with minimum cost. The first simulation shows that learning effects are different when crucial members are teachers and when crucial members are graduate students. This verifies that teachers are crucial nodes in the network of graduate learning community. The graduate learning community s a group centered on academic research and knowledge sharing, where teachers play the role of mentors, coordinators, and resource providers. The reasons why teachers are crucial nodes in the network of graduate learning community are mainly reflected in the following aspects. Firstly, teachers typically possess extensive academic experience and professional knowledge, enabling them to provide guidance on research directions by formulating research plans, offering methodological advice, and evaluating studies for graduate students. This leading role is crucial for the efficient operation of the graduate learning community. Secondly, teachers leadership helps build a highly collaborative learning environment. By organizing academic discussions and project collaborations, they can enhance interaction and trust among community members. Thirdly, graduate students often face high pressure and uncertainty in academic research. Teachers’ leadership can help students overcome difficulties through motivation and emotional support. Recognition, encouragement, and constructive feedback from teachers can boost graduate students’ learning motivation and confidence.
Therefore, teachers should enhance their sense of responsibility in driving the whole learning community. Firstly, teachers should fully utilize their academic experience and professional knowledge to provide graduate students with clear research directions and methodological guidance, helping them develop reasonable research plans. At the same time, teachers can offer necessary academic resources, such as literature materials, experimental equipment, or industry connections, to help students overcome practical difficulties in their research. Secondly, teachers should try to create a collaborative and inclusive atmosphere. Teachers can encourage interaction and collaboration among graduate students by organizing academic seminars, team projects, and interdisciplinary exchange activities, thereby strengthening trust and connections among community members. Additionally, teachers should respect students’ diverse backgrounds and perspectives, fostering an inclusive learning environment where every student feels a sense of belonging. Thirdly, the teachers should motivate students and provide emotional support. Teachers should enhance students’ confidence and learning motivation through positive feedback, recognition, and encouragement. Teachers can also act as listeners, paying attention to students’ emotional needs and helping them cope with academic and psychological difficulties.
Discussion 2
The number of teachers makes difference on professional learning community for graduate students.
The second simulation shows that number of crucial members would exert influence on learning effects of the professional community. The bigger the number of crucial community members, the better the learning effects are. The reason is that multiple crucial members can better meet diversified demands of graduate students. Sufficient teacher numbers can ensure a more reasonable teacher-student ratio. A higher teacher-student ratio means that each teacher can dedicate more time and energy to individual students or small groups, thereby providing more in-depth and personalized academic guidance, research methodology training, and feedback on papers. This is crucial for deep learning and solving complex research problems at the graduate level. Besides, a larger number of teachers typically means that the learning community can cover a broader range of professional fields and research directions. This allows graduate students to be exposed to diverse academic perspectives, research paradigms, and methodologies, which is particularly beneficial for interdisciplinary research and fostering innovative thinking.
It has two implications for us. Firstly, the proportion of teachers to students within the community should be reasonable so that the teachers are not over-loaded and they can provide enough guidance for each student, which is necessary for individual development. Secondly, teachers within a community should adhere to the concept of win-win, collaborate with each other, and undertake the due responsibility of leaders. The community should give full play to each teacher’s strength, which would not only meet necessary needs, but also can also facilitate the communication network within the community as a whole.
Conclusion
Professional learning community has witnessed the shift from teacher teaching to student learning, and it is pervasive. As for graduate students, the professional learning community consists of teachers and graduate students. Grounded in graph theory, this paper proposes a CAIDD model to simulate the asymmetric study willingness of professional learning community for graduate students. The communication network within this community is divided into two layers. Teachers of the professional learning community are chosen as crucial members and form the upper layer and graduate students form the second layer. LQR is introduced as the induction strategy of the upper level and it can significantly improve the level of cooperation within the learning community. Furthermore, the analysis conducted using a designed Lyapunov function has provided theoretical support for the stability and effectiveness of our proposed model.
Data availability
The datasets analysed during the current study are not publicly available due Personal privacy but are available from the corresponding author on reasonable request.
References
Ackerman RH, Mackenzie SV (2007) Uncovering teacher leadership: essays and voices from the field. Corwin Press
Bailey M, Ifenthaler D, Gosper M, Kretzschmar M, Ware C (2015) The changing importance of factors influencing students’ choice of study mode. Technol Knowl Learn 20:169–184
Barr RB, Tagg J (1995) From teaching to learning–a new paradigm for undergraduate education. Chang Mag High Learn 27:12–26
Bowman RF (2004) Teachers as leaders. Clearing House J Educ Strateg Issues Ideas 77:187–189
Chamba-Eras L, Arruarte A, Elorriaga JA (2023) T-vlc: a trust model for virtual learning communities. IEEE Trans Learn Technol 16:847–860
Chen J, Xu X, Chen L, Ruan Z, Ming Z, Liu Y (2023) Ctl-diff: Control information diffusion in social network by structure optimization. IEEE Trans Comput Soc Syst 10:1115–1129
Crowther F (1997) Teachers as leaders-an exploratory framework. Int J Educ Manag 11:6–13
DuFour R (2004) What is a" professional learning community"? Educ Leadersh 61:6–11
Flogie A, Aberšek, B (2022) Artificial intelligence in education. Active Learning-Theory and Practice
Francesca G, Marco DM, Angelo C, Giuseppina P (2010) Discovering the hidden dynamics of learning communities. J Inf Technol Case Appl Res 12:34–55
Jiang M, Ting E (2000) A study of factors influencing students’ perceived learning in a web-based course environment. Int J Educ Telecommun 6:317–338
Jin X, Li H, Yu D, Wang Z, Li X (2024a) Topological optimization of continuous action iterated dilemma based on finite-time strategy using dqn. Pattern Recognit Lett 182:133–139
Jin X, Wang Z, Yu D, Li X (2024b) The convergence analysis of evolutionary dynamics for continuous action iterated dilemma in information loss networks. IEEE Trans Comput Soc Syst 11:2595–2605
Jin X, Wang Z, Zhao J, Yu D (2022) Swarm control for large-scale omnidirectional mobile robots within incremental behavior. Inf Sci 614:35–50
Kabes S, Lamb D, Engstrom J, (2010) Graduate learning communities: transforming educators. J College Teach Learn 7(5)
Katzenmeyer M, Moller G (2009) Awakening the sleeping giant: helping teachers develop as leaders. Corwin Press
Kazemi Y, Chanel CPC, Givigi S (2024) Causal reinforcement learning in iterated prisoner’s dilemma. IEEE Trans Comput Soc Syst 11:2523–2534
Li J, Zhang C, Sun Q, Chen Z, Zhang J (2017) Changing the intensity of interaction based on individual behavior in the iterated prisoner’s dilemma game. IEEE Trans Evolut Comput 21:506–517
Lieberman A, Pointer Mace DH (2009) The role of ‘accomplished teachers’ in professional learning communities: Uncovering practice and enabling leadership. Teach Teach theory Pract 15:459–470
Lin Y, Wang X, Hao F, Jiang Y, Wu Y, Min G, He D, Zhu S, Zhao W (2021) Dynamic control of fraud information spreading in mobile social networks. IEEE Trans Syst Man Cybern Syst 51:3725–3738
Lunenburg FC (2010) Creating a professional learning community. In: National forum of educational administration and supervision journal 27;1–7
Meloth MS, Deering PD (2014) The role of the teacher in promoting cognitive processing during collaborative learning. In: Cognitive perspectives on peer learning. Routledge, pp 235–255
Olfati-Saber R, Murray R (2004) Consensus problems in networks of agents with switching topology and time-delays. IEEE Trans Autom Control 49:1520–1533
Qiu C, Long B, Yu D, Cheong KH (2023) Evolving the classroom: a mathematical and didactic exploration of teacher-guided peer learning. Chaos Solitons Fractals 174:113853
Qiu C, Yu D, Wang Z, Chen CL.P (2024a) Teacher-guided peer learning with continuous action iterated dilemma based on incremental network. IEEE transactions on computational social systems
Qiu C, Yu D, Wang Z, Chen CP (2024b) Teacher-guided peer learning with continuous action iterated dilemma based on incremental network. IEEE transactions on computational social systems
Ramos IMM, Ramos DB, Gadelha BF, de Oliveira EHT (2021) An approach to group formation in collaborative learning using learning paths in learning management systems. IEEE Trans Learn Technol 14:555–567
Rasheed RA, Kamsin A, Abdullah NA (2021) An approach for scaffolding students peer-learning self-regulation strategy in the online component of blended learning. IEEE Access 9:30721–30738
Shah M, Sid Nair C, Bennett L (2013) Factors influencing student choice to study at private higher education institutions. Qual Assur Educ 21:402–416
Stevenson CB, Duran RL, Barrett KA, Colarulli GC (2005) Fostering faculty collaboration in learning communities: a developmental approach. Innov High Educ 30:23–36
Thurman J, Volet SE, Bolton JR (2009) Collaborative, case-based learning: how do students actually learn from each other? J Vet Med Educ 36:297–304
Wageman R (1995) Interdependence and group effectiveness. Admin Sci Quarter 145–180
Wang X, Wang X, Min G, Hao F, Chen CLP (2022) An efficient feedback control mechanism for positive/negative information spread in online social networks. IEEE Trans Cybern 52:87–100
Yang F, Wang M, Shen R, Han P (2007) Community-organizing agent: an artificial intelligent system for building learning communities among large numbers of learners. Comput Educ 49:131–147
Yao C, Wilson B, Garcia C, DeFrain E, Cano A (2017) Helping graduate students join an online learning community. EDUCAUSE Review
Ranjbar-Sahraei B, Bou Ammar H, Bloembergen D, Tuyls K, Weiss G (2014) Evolution of cooperation in arbitrary complex networks. In Proceedings of the 2014 International Conference on Autonomous agents and Multi-Agent Systems. Citeseer, pp 677–684
Acknowledgements
This paper was partially supported by the Zhejiang Provincial Philosophy and Social Sciences Planning Project (Research on the Evaluation Mechanism for the Effectiveness of Ideological and Political Education for Undergraduate Students in the Era of Large Models) under grant No. 26GXSZ004YB and Shaanxi Social Science Foundation Project "Research on the Construction and Application of Core Literacy Assessment Model for Normal Students" (2021P027).
Author information
Authors and Affiliations
Contributions
Qiu Can: Methodology, formal analysis, writing-original draft. Jinming Chang: Software, validation, prepared figures. Liu Xiaolin: Conceptualization, methodology, writing-review and editing, supervision. Dengxiu Yu: Project administration, funding acquisition, supervision. Philip Chen: Funding acquisition, supervision, and reviewed the manuscript.
Corresponding author
Ethics declarations
Competing interests
The authors declare no competing interests.
Ethical approval
This study was ethically reviewed and approved by the Research Ethics Review Committee at Xianyang Normal University. The approval process followed ethical standards equivalent to those outlined in the Declaration of Helsinki, ensuring that the study met accepted ethical principles for research involving human participants. The ethical approval number is XYNURER-25-01, and the date of the approval is on January 8, 2025. (During the process of revising the paper, we supplemented a portion of the survey that involved human participants, and therefore, we submitted an ethics application. That’s the reason why the approval was obtained after the research commencing.) All procedures involving human participants, including recruitment, sample collection, and data analysis.
Informed consent
Written informed consent was obtained from all participants on January 10, 2025, after being informed about the background, purpose, and procedures of this research. The participants are entirely voluntary, and they can choose not to participate or withdraw at any time by informing the researcher without facing discrimination or retaliation, and their rights will not be affected. We strictly maintained confidentiality and anonymity, and the collected data is used in this research only. The participants reconfirmed the consent when the data was collected.
Additional information
Publisher’s note Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
Open Access This article is licensed under a Creative Commons Attribution-NonCommercial-NoDerivatives 4.0 International License, which permits any non-commercial use, sharing, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons licence, and indicate if you modified the licensed material. You do not have permission under this licence to share adapted material derived from this article or parts of it. The images or other third party material in this article are included in the article’s Creative Commons licence, unless indicated otherwise in a credit line to the material. If material is not included in the article’s Creative Commons licence and your intended use is not permitted by statutory regulation or exceeds the permitted use, you will need to obtain permission directly from the copyright holder. To view a copy of this licence, visit http://creativecommons.org/licenses/by-nc-nd/4.0/.
About this article

Cite this article
Can, Q., Chang, J., Liu, X. et al. Modeling and guiding mechanism of asymmetric study willingness within the professional learning community for graduate students. Humanit Soc Sci Commun 12, 1539 (2025). https://doi.org/10.1057/s41599-025-05838-0
Received:
Accepted:
Published:
Version of record:
DOI: https://doi.org/10.1057/s41599-025-05838-0
