
Abstract
As dense sensor networks for air quality monitoring become increasingly prevalent, effective calibration remains a critical yet challenging component of their operation, particularly for large-scale networks. Conventional calibration methods, which rely heavily on co-locating sensors with reference monitors for learning and training, often face significant scalability challenges, rendering them impractical for post-deployment recalibration. To address this limitation, we propose an in-situ baseline calibration method (b-SBS) that calibrates sensors remotely without the need for direct co-location. This approach is grounded in the physical characteristics of electrochemical sensors and is informed by statistical analyses of calibration coefficients across a large group of similar sensors. Through preliminary field tests conducted on a batch of sensors for NO2, NO, CO, and O3, two key linear calibration coefficients, sensitivity and baseline, were systematically investigated. Sensitivity analysis of over 100 short-term calibration samples for each gas revealed coefficients clustered within 20% variation, enabling universal parameterization. Long-term baseline drift remained stable within ±5 ppb for NO2, NO, and O3, and ±100 ppb for CO over 6 months, supporting semi-annual recalibration. Applying the b-SBS calibration approach to 73 NO2 sensors in a large-scale Shanghai network yielded pronounced data quality improvements compared to their original measurements (initially calibrated before deployment): the median R2 increased by 45.8% (from 0.48 to 0.70), and RMSE decreased by 52.6% (from 16.02 to 7.59 ppb), as validated against nearby reference stations. The Shanghai application, while showing the method’s potential for large-scale deployments, awaits further real-time validation to confirm its robustness under diverse operational conditions. This study is a valuable advancement in calibration strategies, offering a cost-effective solution that reduces operational costs while ensuring accurate measurements across numerous sensors and long-term network deployments.
Similar content being viewed by others

Introduction
The use of air quality sensors has grown substantially in recent years. Networks composed of these sensors provide cost-effective, high-resolution spatiotemporal pollution data compared to conventional monitoring stations. This potential has prompted researchers and organizations worldwide to explore and enhance air quality sensor technologies1,2,3,4,5. Various sensor types, including optical sensors6, metal oxide semiconductor sensors7,8, and electrochemical sensors9,10,11, are employed based on users’ specific needs. Among them, electrochemical sensors have emerged as the most extensively used technology for monitoring gaseous pollutants12,13,14. It offers several advantages over other commonly used sensor types in this field due to their distinctive features, including relatively fast response times, a linear response to concentration, and exceptional sensitivity with detection limits reaching as low as parts per billion (ppb)15. These attributes make electrochemical sensors particularly suitable for ambient air quality monitoring.
Electrochemical sensor networks for criteria pollutants (NO2, NO, O3, and CO) have been implemented globally16. Nevertheless, quality assurance remains challenging, stemming from large-scale deployments across diverse environments. Consequently, in most field applications, raw sensor data is often utilized without post-processing or with minimal calibration, reinforcing the perception that these sensors are primarily suited for qualitative air quality assessment rather than for quantitative regulatory monitoring17,18,19. This underscores the need for robust, efficient calibration strategies to enhance the reliability and utility of sensor networks.
Traditional calibration approaches often rely on periodic co-location with reference-grade monitors (RGMs)20,21,22. While effective, these methods necessitate individual calibration of each sensor through direct co-location, making the process time-consuming and labor-intensive. It also fails to optimize the performance of an entire sensor network from a collective perspective. These limitations highlight the need for scalable calibration approaches that maintain accuracy without requiring physical co-location, prompting exploration of in-situ methods that leverage spatial homogeneity and reference data from nearby RGMs. For example, Miskell et al.23 developed a remote, self-updating calibration method for a hierarchical sensor network, using a few nearby regulatory-grade instruments as proxies to estimate the slope and offset of sensors via statistical correlations of mean and standard deviation. Similarly, Winter et al.24 proposed a remote calibration method that exploits periods of uniform pollutant concentrations across a network, achieving a remotely calibrated R2 of 0.66, which approaches the co-located R2 of 0.82 and surpasses the sensor performance of many co-located calibration studies. These in-situ calibration methods rely on periods of uniform pollutant concentrations to establish concentration ranges for calibration, adjusting variables such as sensor slope and offset, and sometimes calculating interference coefficients for temperature and humidity. This approach may pose challenges, as individual sensors still require separate calibration, and the use of high-concentration data from distant RGMs as reference values for slope calibration may introduce significant errors, particularly when spatial variability is pronounced.
This study seeks to develop a streamlined, physically interpretable framework for the remote calibration of distributed sensor stations within a monitoring network, with potential for broader application. We employed electrochemical sensor-based Mini Air Station (MAS-AF300, Sapiens, China), referred to as “MAS”, to conduct field trials and facilitate large-scale deployment within a sensor network. The MAS sensor has mitigated the impact from temperature and humidity through the application of a dynamic baseline tracking technology25, making the transformation from electric signal to calculated concentration mathematically dependent on two fundamental coefficients: sensitivity and baseline. Sensitivity quantifies the sensor’s responsiveness to changes in gas concentration, while the baseline represents the zero output in the absence of the target gas26. The traditional calibration method, known as side-by-side (SBS) with RGM, requires the calculation of both coefficients.
The new in-situ baseline calibration method simplifies the process by establishing a fixed sensitivity value while allowing for a calibratable baseline value, designated as the b-SBS method. The method is based on the common characteristics of the sensors, ensuring ease of transferability and bulk application. Extensive field trials on a batch of sensors were conducted in Hong Kong from 2021 to 2023 to investigate the characteristics of the two calibration coefficients (sensitivity and baseline) for NO2, NO, CO, and O3 sensors. We analyzed hundreds of sensor co-location samples to assess the similarity of their sensitivity values. Four additional sensor units with 1 year of co-location data were used to estimate baseline drift, which informed the appropriate calibration frequency. Following these preliminary evaluations, the b-SBS method was applied to a 2020–2021 dataset from another batch of sensors deployed in Shanghai, a megacity in China. The spatial and temporal variability of gaseous pollutants in Shanghai was investigated to establish the validity of the remote calibration assumption for these sensors. The performance of the b-SBS calibration method was then evaluated against the traditional SBS method. Ultimately, the calibrated sensor network was employed in a case study focused on source identification in a hotspot area near the port, further illustrating its applicability. The overall methodology and key tests in the study are summarized in a workflow presented in Fig. 7 in the “Methods” section for a clearer summary.
Results
Sensitivity analysis of batch sensors
This study initially conducted field tests in Hong Kong for 75 individual MAS gas sensors to analyze the coefficient characteristics of their sensitivity. Each MAS sensor underwent multiple 5 to 10-day co-location trials with RGM. Each co-location trial is referred to as a “calibration sample”, representing the set of measurements from a single MAS sensor during one trial. To ensure data integrity, we screened out data with sensor hardware failure and maintenance periods prior to the analysis. Only 4 NO2 calibration samples and 12 O3 calibration samples were identified as outliers while the remaining samples included 151 NO2, 102 NO, 132 CO, and 143 O3 calibration samples, with their results presented in Fig. 1a–d.

a–d NO2, NO, CO, and O3 sensitivity variations across diverse calibration samples, sorted by calibration R2 values to visualize the relationship between sensitivity and R2 distribution. The color indicates the R2 values between the calibrated sensors and reference data. e–h present boxplots showing the distribution of the corresponding sensor sensitivities, where the central red line represents the median, the box indicates the interquartile range (IQR) from the first quartile to the third quartile, and the black whiskers extend to the values within 1.5 times the IQR. The blue whiskers represent the overall minimum and maximum values.
We assessed the R2 values from comparisons with RGM data to confirm that the sensor sensitivity accurately reflects their linear response to concentration. After applying the traditional calibration method outlined in Eq. (1), the R2 values were as follows: NO2 R2 ranged from 0.62 to 0.99, NO R2 from 0.66 to 0.98, CO R2 from 0.60 to 0.97, and O3 R2 from 0.61 to 0.99. According to the United States Environmental Protection Agency (USEPA) Air Sensor Performance Targets and Testing Protocols published in 2021 and 202427,28, recommended performance metrics include target R2 values of 0.7 for NO2 and 0.8 for both O3 and CO. Our results indicate that 93% of the R2 values for NO2 exceed 0.70, 66% for CO and over 83% for both NO and O3 exceed 0.80. This suggests that the data quality of the majority of samples is robust, despite the noticeable differences in R2 values among the sensors.
The calculated sensitivity coefficients are further presented using boxplots in Fig. 1e–h to clarify their distribution. Each of them is clustered within a narrow range and approximates a normal distribution. Table 1 provides additional indicators to assess the distribution, with several key metrics suggesting a concentrated distribution that supports high consistency among the sensors. The mean and median sensitivity values for each gas are closely aligned. For instance, the NO2 sensitivity has a mean of 3.36 ppb/mV and a median of 3.57 ppb/mV, while the NO sensitivity shows a mean of 1.78 ppb/mV and a median of 1.80 ppb/mV. This alignment between the mean and median reflects minimal skewness in the distribution. The Coefficient of Variation (CV) values further support this observation, with NO2, NO, O3, and CO sensitivities showing CVs of 15%, 16%, 22%, and 16%, respectively. CV values below 20% suggest that the data are clustered closely around the mean, indicating high consistency in sensitivity coefficients. Furthermore, a significant proportion of data fall within ±1 standard deviation: 78.67% for NO2, 73.27% for NO, 71.88% for CO, and 76.06% for O3. This trend continues within ±2 and ±3 standard deviations, indicating a concentrated distribution of sensitivity values.
The clustered sensitivity distributions support the use of population-level median coefficients for bulk calibration. Median values were selected over means due to tighter alignment with modal clusters in Fig. 1e–h, minimizing outlier influence. Consequently, we designate the median value from each distribution as the universal sensitivity value: NO2: a = 3.57 ppb/mV; NO: a = 1.80 ppb/mV; CO: a = 2.25 ppb/mV; O3: a = 2.50 ppb/mV.
Calibration performance in preliminary trials
The median sensitivity values obtained for each gas pollutant were applied for sensor concentration calculations, combined with the 1st percentile (1 P) method for baseline calibration. To evaluate whether the b-SBS approach achieves comparable performance to the traditional SBS calibration method, the performance metrics of R2 and RMSE for both the b-SBS and SBS methods were compared, based on data from sensors that were co-located with the RGM.
Based on the principles of simple linear regression, the SBS calibration equation (Eq. (1)) adjusts two coefficients simultaneously, enabling the least squares method to minimize regression residuals and identify coefficients that yield the lowest RMSE and highest R2 among possible regression outcomes. In contrast, b-SBS allows only one coefficient to vary, leading to expected lower performance with R2 (b-SBS) < R2 (SBS), and RMSE (b-SBS) > RMSE (SBS), resulting in R2_diff = R2 (b-SBS) − R2 (SBS) < 0 and RMSE_diff = RMSE (b-SBS) – RMSE (SBS) > 0. Our goal is to minimize these differences, with smaller R2_diff and RMSE_diff indicating greater effectiveness of b-SBS.
Results for NO2, presented in Fig. 2, demonstrate comparable performance to the traditional SBS method, with approximately 97% (90%) of R2_diff > −0.1 (−0.05) and 97% (82%) of RMSE_diff < 1 (0.5). Similar results were noted for NO, CO, and O3 (Figs. S1–S3), with around 92% of R2_diff for NO, 88% for CO, and 96% for O3 exceeding −0.1. Additionally, 94% of RMSE_diff for NO and O3 was below 1, and 93% for CO were below 10. These findings indicate minimal performance differences across pollutants.

a R2 performance and b RMSE performance across diverse calibration samples after b-SBS and SBS calibration, sorted by calibration R2 values. The left y-axis represents the absolute values of R2 and RMSE for both methods (blue line and green line), while the right y-axis shows the differences in R2 and RMSE (R2_diff and RMSE_diff, represented by gray bars). The boundary lines for R2_diff = −0.1 and RMSE_diff = 1 are indicated by gray dashed lines, serving as reference lines for assessing the magnitude of the differences between the corresponding metrics.
Some calibration samples exhibited abrupt fluctuations with high absolute values of R2_diff and RMSE_diff, primarily during low-concentration periods. To illustrate the concentration range’s impact on calibration performance, we analyzed two examples from NO and NO2 sensors, which underwent multiple co-location trials. As shown in Fig. S4, an NO sensor experienced concentration ranges of 25 ppb and 125 ppb, resulting in R2_diff of −0.30 and −0.03, respectively, a pattern also observed in NO2. This aligns with findings by Mei et al.25, indicating that low-concentration ranges can lead to calibration uncertainties, highlighting the need for empirical coefficients rather than solely relying on regression results from the SBS method. We also noted instances where SBS calibration yielded high R2 values (R2 > 0.9) while b-SBS produced lower values (R2 < 0.8). These discrepancies were attributed to variability in individual sensors, making them unsuitable for b-SBS; however, such cases constituted less than 5% of the total and were excluded from further analysis.
Overall, the b-SBS calibration method demonstrated performance comparable to the traditional SBS method, reinforcing confidence in this efficient calibration strategy.
Determination of calibration frequency
The baseline parameter represents output of a sensor in the absence of the target gas, acting as an important indicator that accounts for variability caused by external factors, such as temperature, humidity, or sensor degradation. Long-term co-location data from another four MAS units ranging from 8–14 months were analyzed to assess baseline drift, which is crucial for determining the optimal frequency of baseline recalibration when applying b-SBS method. This analysis aligns with the compliance drift thresholds set by the USEPA for low-cost sensors27,28: ±5 ppb for NO2, NO, and O3, and ±100 ppb for CO, as referenced in multiple studies on sensor drift29,30,31.
Long-term stability of sensitivity parameter was evaluated prior to baseline drift to ensure that observed baseline changes reflect true sensor behavior rather than sensitivity shifts, providing a reliable basis for calibration frequency recommendations. Monthly SBS calibrations were performed on the four MAS units, with sensitivity values calculated and reported in Fig. S5. The monthly sensitivity exhibits temporal variability but remains centered around the median values from Fig. 1, with fluctuations confined within 1.5 times the IQR. The calculated CV across all devices and gas species was below 15%, consistent with the 20% variation threshold established in Section “Sensitivity analysis of batch sensors”. This suggests that sensitivity remains stable under year-long field conditions, providing support for the reliability of the b-SBS method as applied during the year-long field deployment. However, it is important to note that for deployments extending beyond 1 year, sensitivity coefficients should be periodically re-evaluated through targeted co-location tests or statistical monitoring, as our empirical evidence is constrained to a maximum of 14 months and does not account for potential longer-term drifts due to sensor aging.
For baseline drift assessment, monthly baseline values were computed, with sensitivity fixed at the median values from Fig. 1. As shown in Fig. 3, the absolute values of baseline changes for each gas were as follows: for NO2, changes ranged from 0.23 ppb to 4.54 ppb; for NO, the range was 0.01 to 3.09 ppb; for CO, it varied from 1.26 to 187 ppb; and for O3, from 0.05 to 3.26 ppb. Notably, all sensors, except one CO sensor, remain within the USEPA’s compliance drift thresholds. This is expected, as the sensor baselines may be influenced by various external physical factors, including environmental condition variations, sensor component aging, and exposure to contaminants. Additionally, mathematical calculation errors can lead to variability in the baseline determined during each computation.

a–d show baseline variation for NO2, NO, CO, and O3 sensors during the long-term co-location test. The monthly baseline values for each sensor were mathematically centralized by subtracting the mean baseline value from each individual monthly reading. Solid lines depict trendlines for individual sensors, with their slopes (in ppb/month) calculated and annotated in matching colors on the graph. Gray dashed lines indicate the boundary limits of y = ±5 ppb for NO2, NO, and O3, and y = ±100 ppb for CO, serving as reference lines to assess the magnitude of baseline variation.
Further analysis involved plotting baseline trendlines for each sensor and calculating corresponding formulas. The slopes of these trendlines reflect the gradual changes in baseline, providing a more accurate indication of drift caused by these physical factors, which typically correlate with time. Linear regression analysis of monthly trends indicated that the drift rate for NO2 ranged from 0.15 to 0.41 ppb per month, projecting a deviation of less than 5 ppb over 6 months. Similar estimates for NO and O3 also indicated a maximum drift of 5 ppb over the same period, while CO exhibited a maximum drift of 50 ppb.
Consequently, if a baseline drift exceeding 5 ppb is adopted as a calibration interval, two standards emerge: if strictly considering monthly sensor drift, a calibration frequency of once per month is recommended. However, for longer-term seasonal drift, recalibrating every 6 months may suffice.
Spatial homogeneity analysis
Prior to implementing the b-SBS calibration across Shanghai’s sensor network, we validated the spatial homogeneity of specific air pollutants using 1 P concentrations from 61 regulatory RGM sites. This analysis confirms whether low-concentration conditions, essential for baseline calibration, exhibit spatial uniformity across Shanghai’s complex urban environment.
Figure 4 presents the spatiotemporal distribution of the 1st percentile NO2 concentrations across various RGM sites each month. Monthly 1 P values for NO2 showed 90% of concentrations ≤10 ppb, with maximum site-to-site discrepancies of 10 ppb, which is within the MAS sensor’s ±5 ppb accuracy threshold. Initial outliers (10–20 ppb) observed in Month 1 represented <5% of data points, likely reflecting transient emission events rather than systemic heterogeneity. Subsequent months demonstrated tighter clustering, with 78% of monthly 1P values varying ≤5 ppb between sites. This observation implies that in this study, for the NO2 characteristics observed at the regulatory RGM sites to be considered representative of the conditions experienced by the sensor network, the uncertainty range is defined as 0–10 ppb. Similar patterns of high similarity among different sites are also observed for NO, CO and O3 in Figs. S6–S8, confirming that Shanghai’s low-concentration regimes meet the homogeneity assumption required for b-SBS calibration—a critical prerequisite given 43% of sensors operate more than 1.5 km from reference sites.

The x-axis represents the monthly timeline, while the y-axis shows the identification numbers of different RGM sites. The 1P concentrations are categorized into five levels, with darker colors indicating higher pollution levels. The white areas represent missing data.
To further evaluate the transferability of the b-SBS method across diverse atmospheric conditions, we extended the spatial homogeneity analysis to another 7 Chinese megacities (Beijing, Chongqing, Wuhan, Hangzhou, Jinan, Fuzhou, Harbin). For NO2, 86.67% to 100% of monthly 1P values across all cities exhibited site-to-site differences ≤10 ppb, with mean differences ranging from 1.22 ppb (Fuzhou) to 3.91 ppb (Shanghai). For O3, however, only Shanghai (93.33%) and Fuzhou (66.67%) had monthly 1P differences ≤10 ppb in over 50% of months, while other cities ranged from 0% (Harbin) to 46.67% (Chongqing), with mean differences of 3.16 ppb (Fuzhou) to 15.12 ppb (Harbin). These findings, detailed in Table S1, suggest that the b-SBS method’s reliance on spatial homogeneity holds for NO2 across diverse urban settings but may require pollutant-specific adjustments for O3, particularly in cities with higher pollution levels, complex topography, or pronounced urban-rural gradients.
The methodology provides a template for verifying spatial uniformity in other cities or regions prior to deploying in-situ calibration frameworks. However, while 1P was effective in this study, the selection of the statistical method to extract baseline should be adapted on a case-by-case basis, considering the pollutant’s characteristics and potential influences from outliers, such as negative values, which could skew baseline estimates in other scenarios. For instance, although 5th percentiles (5P) are empirically used for background levels32, our percentile gradient analysis (1P–5P) revealed 1P distributions exhibited superior spatial consistency. In this study, 1P was found to be more appropriate than 5P, likely attributable to Shanghai’s complex pollution dynamics, marked spatial variability in emission sources, and the observed absence of negative or abnormally low values in the data from the regulatory RGM sites.
Calibration performance in real-world application
Following validation of sensitivity consistency, baseline stability, and spatial homogeneity, we implemented b-SBS calibration to a network of 97 NO2-focused MAS sensors deployed across Shanghai from August 1, 2020, to August 1, 2021. After data cleaning, 73 sensors met the data completeness threshold (>50% valid data). We compared sensor measurements before and after b-SBS recalibration against hourly data from the nearest RGM, with distances ranging from 0.3 to 48 km.
Prior to deployment, all 97 MAS sensors were calibrated using the SBS method through co-location with RGMs. Measurements based on these initial parameters are referred to as “before calibration” in Fig. 5. The “after calibration” data reflects sensor measurements recalibrated with b-SBS method, which updates the baseline every month while retaining fixed sensitivity values based on raw voltage signals. Performance metrics (R2 and RMSE) were calculated to evaluate the improvement in data quality post b-SBS correction.

The performance metrics R2 and RMSE compare each sensor’s performance with its nearest RGM. The color of the points indicates each sensor’s distance from its nearest RGM. The dashed line and the values surrounding it represent the median R2 and RMSE before and after calibration, with corresponding colors.
As shown in Fig. 5, after calibration, median R2 improved from 0.48 to 0.70 and RMSE decreased from 16.02 to 7.59 ppb, despite distance-induced localized variability. Some sensors exhibited low R2 values (less than 0.7) and high RMSE values, with many exceeding 10 ppb. This can be partly attributed to the distance between the sensors and the RGM sites, which may expose them to localized pollution sources, resulting in poorer R2 and RMSE values. Therefore, the absolute values presented in these metrics should not be the primary reference; instead, the relative differences between the before and after b-SBS calibration results are a more important criterion for assessing the effectiveness of the b-SBS calibration method. Overall, a clear improvement is observed in Fig. 5 after calibration, with the median R2 increasing by 45.8%, and median RMSE decreasing by 52.6%.
Another advantage of the b-SBS method is its ability to identify and correct anomalies in sensor status. During deployment, environmental factors, equipment malfunctions, or variations in quality control expertise may cause changes in the equipment’s status, leading to variations in the calibration coefficients. The b-SBS method effectively detects these anomalies and errors without the need for co-location with reference sensors. A detailed assessment of the data status for each individual sensor was further conducted by reviewing the original concentration outputs. Although most sensors exhibited concentration trends consistent with the RGM data, significant biases were identified. These biases can be categorized into three main types: (1) abnormal baseline concentrations, either excessively high or low; (2) unusual fluctuations in concentration due to anomalous sensitivity coefficient; and (3) anomalies attributable to equipment malfunctions. Fig. S9 presents three case studies that exemplify these types of data bias.
Identifying and correcting these anomalous sensors and data is often challenging when relying solely on comparisons with nearby RGM. However, by extracting the original voltage signals from the sensors and applying b-SBS calibration, we can discern whether concentration deviation is introduced by anomalous parameters or reflect genuine spatial concentration differences. Thus, the b-SBS method not only serves as a calibration technique but also aids in identifying anomalous parameters, concentrations, and equipment malfunctions for sensors. The Shanghai deployment functions as a proof-of-concept test case, illustrating promising improvements in data quality; however, rigorous prospective validation in real-time settings is necessary to address potential confounders like pollutant spatial variability and sensor performance variability.
Source identification case study
To verify that our calibrated MAS sensor network is capable of accurately capturing the hyper-local air pollution and describing variation close to pollution sources, we selected a port area in Shanghai for a short-term semi-quantitative case study involving a 10-sensor network deployment. Previous studies have identified significant NO2 pollution sources in this region33, prompting us to further delineate the main local sources using the monitoring data from this sensor network.
Bivariate polar plots serve as an effective tool for source characterization, illustrating mean pollutant concentrations across specific wind speed and direction bins34. We analyzed bivariate polar plots for NO2 concentrations from all sensor sites, as shown in Fig. 6. The data from these sensors reveal distinct pollutant distribution patterns depending on their deployment locations. For example, MAS 1#, located on the outside of the port and on the south side of the Outer Ring Expressway, exhibits higher NO2 concentrations during northerly winds, indicating a significant impact from port emissions on the urban environment. Conversely, during southerly winds, concentrations are lower, suggesting limited influence from urban traffic.

These plots illustrate the spatial variability in the port area with a deployment of ten MAS sensors during the sampling period from October 25 to November 2, 2020. Reddish colors indicate higher concentrations, while bluish hues represent lower concentrations.
In addition to MAS 1#, the remaining nine sensors are positioned along traffic arteries, operational zones, and berthing areas of the port. Notably, high NO2 concentrations were recorded at MAS 2# and MAS 4#, located on the east side of a major road and at the entrance to the operational area, respectively. These sensors showed a marked increase in concentrations during low wind conditions, indicating they are likely near the highest NO2 emission sources in the port. Notably, MAS 2# did not display a significant increase in concentrations during southerly winds, suggesting limited impact from Outer Ring Expressway on the interior of the port area.
MASs located in the operational and berthing areas (MAS 5#, 8#, 9#, and 10#) recorded relatively low and consistent NO2 concentrations, with peaks occurring primarily under low wind speeds (poor diffusion conditions) and in the downwind direction of traffic arteries. This indicates a lack of significant emission sources in these areas, with concentrations mainly influenced by the emissions and diffusion conditions of trucks within the port.
Overall, the results demonstrate the benefits of multi-sensor network measurements for detailed source characterization following careful data calibration. These sensors enable high-density neighborhood-scale monitoring, allowing for a better understanding of spatial patterns and temporal air quality trends across urban areas.
Discussion
This study introduces a novel in-situ calibration framework that enhances both efficiency and performance of sensor networks. Our methodology is supported by a substantial dataset comprising calibration samples collected from 79 different MAS gas sensors, including 75 short-term and 4 long-term co-location sensors, during preliminary tests. Compared to prior studies9,11,26,35,36 typically using ≤10 sensors, our large-scale evaluation bolsters statistical validity and offers insights into the characteristics and performance of electrochemical gas sensors.
A key finding of this study is that the sensitivity of hundreds of sensor calibration samples are concentrated within a narrow range. The underlying explanation may relate to the mitigation of cross-interference effects on sensor signals. While uniform manufacturing enables theoretical consistency, field conditions often degrade performance through temperature/humidity fluctuations37. The MAS sensor devices have effectively mitigated the effects of temperature and humidity on sensor signals, thereby enabling more focused detection of concentration levels. Ariyaratne et al.36 support the assertion that under stable environmental conditions with minimal fluctuations in temperature and humidity (e.g., 20–24 °C with variations of ±1 °C and relative humidity of 75–90% with variations of ±5%), sensors demonstrate consistent responses to concentration changes, further reinforcing the finding of consistent sensitivity among MAS sensors.
Another important finding is that the baselines of different sensors do not exhibit the same level of consistency as their sensitivity; consequently, each sensor’s baseline requires individual calibration. Variability in baseline responses among sensors can be attributed to several factors12,37,38, including subtle differences in electrode materials, electrolyte composition, manufacturing defects, and environmental influences. These discrepancies can affect the electrochemical activity and kinetic properties of each sensor37, resulting in inconsistent zero-point current outputs. Fortunately, long-term baseline tests indicated that the baseline drift over time remained relatively minor (within ±5 ppb), markedly reducing the frequency of recalibrations.
The advantages of the b-SBS method compared to other calibration algorithms are quite evident. Current correction algorithms typically rely on complex linear models, such as Multivariate Linear Regression36,39,40, as well as machine learning approaches including Random Forest20,21, Support Vector Regression41, and Artificial Neural Networks42,43. While these algorithms demonstrate good performance for short-term operations (e.g., 1 month), they often become ineffective due to changes in environmental conditions post-deployment. This necessitates frequent retraining and recalibration with reference monitors. In contrast, b-SBS does not require extensive data for training; instead, it ensures data accuracy and stability through regular in-situ baseline comparisons with nearby reference stations.
However, acknowledging the limitations of this study, several critical aspects warrant consideration to refine the b-SBS method’s applicability. Firstly, the calibration framework is tailored to the electrochemical gas sensors in the MAS units and may not be directly transferable to other sensor types or manufacturers without adaptation. While the approach could potentially be adapted for most electrochemical sensors or those exhibiting linear concentration responses—provided temperature and humidity effects are mitigated, as achieved by the MAS’s dynamic baseline tracking technology—initial validation of these conditions would be essential for broader adoption.
Secondly, the accuracy of the b-SBS method in real-world large-scale sensor networks lacks direct empirical confirmation. Validation in the Shanghai dataset relied solely on comparisons with nearby regulatory monitors, lacking comprehensive sensor co-location data to support more in-depth validation and assessment of the method. This validation gap raises concerns about two primary sources of error that could affect the method’s broader applications: (1) baseline calibration inaccuracies due to spatial concentration differences during remote calibration. For example, in the Shanghai study, 43% of NO2 sensors located over 1.5 km from reference sites (Fig. 5) exhibited poorer performance, with over 90% of R2 values after b-SBS calibration falling below 0.7. In contrast, the Hong Kong co-location study showed that 93% of R2 values after calibration exceeded 0.7, indicating potential calibration errors related to the distance from reference sites. This suggests that the method’s robustness may diminish in less uniform environments. Additional analyses for industrial cities with higher pollutant concentrations, such as Harbin and Jinan (as shown in Table S1), indicate that achieving the 10-ppb uncertainty range for NO2 and O3 may be challenging. This implies that acceptable accuracy levels need to be tailored to city-specific conditions (e.g., pollution levels or urban-rural gradients); and (2) errors arising from inter-sensor sensitivity variations or temporal changes. Statistical analysis of sensitivity revealed that less than 5% of sensors deviated significantly from the empirical median values, rendering them unsuitable for b-SBS calibration. Moreover, while sensitivity remained stable over 1 year in our tests (Fig. S5), several literature31,44 suggest that sensor performance may decay beyond this period, potentially altering sensitivity over extended deployments. The 1-year Shanghai dataset did not address this long-term uncertainty, which could become significant in multi-year monitoring scenarios, necessitating further investigation into sensor aging effects.
Despite these limitations, this study offers valuable methodological insights for future sensor research. It underscores the importance of validating spatial homogeneity and sensitivity consistency prior to large-scale deployment, highlights the need for periodic reassessment of baseline drift over extended timescales, and suggests exploring hybrid calibration strategies that combine in-situ methods with periodic co-location to mitigate long-term uncertainties. Overall, this study presents a practical approach that significantly reduces reliance on traditional, time-consuming side-by-side co-location calibration methods, while opening new avenues for calibrating high-volume sensor networks.
Methods
Sensor design and testing process
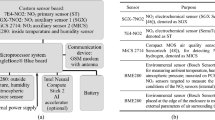
In this study, we employed electrochemical sensor-based Mini Air Station (MAS-AF300, Sapiens, China) to conduct field trials and facilitate large-scale deployment within a sensor network. Notably, the gas sensor modules in MAS employed a novel dynamic baseline tracking technology that physically minimizes the impact of environmental temperature and RH on sensor signals. Detailed information about this technology is introduced in previous work25. The MAS has demonstrated reliable performance and promising applications in numerous short-term studies2,4,45. Sensor raw voltage and pollutant concentration data from the MAS were transmitted to a cloud server in real-time at 1-min intervals via a built-in 4G data transmitter. For subsequent analysis and comparison with the RGM, MAS measurements were downsampled from 1-min to hourly resolution, as the RGM only provides hourly data.
The testing process comprises multiple stages, as outlined in Fig. 7. First, a batch of MAS units from Hong Kong was evaluated utilizing extensive logs of short-term co-location history spanning 5 to 10 days to analyze calibration coefficients and derive empirical values for future sensor network calibrations. Simultaneously, four MAS units with approximately 1 year of long-term co-location data were used to estimate calibration coefficient drift, aiding in the determination of optimal calibration frequency. Next, spatial homogeneity of the target pollutant in the application city needs to be verified as a critical prerequisite, ensuring the conditions are met for applying the b-SBS method in real-world scenarios. With Shanghai meeting this requirement, the b-SBS method was then applied to another batch of 97 sensors in the Shanghai dataset. Lastly, a case study with 10 sensors in a Shanghai hotspot was conducted for hyper-local source identification using the calibrated sensors. Detailed descriptions of each testing process are available in subsequent sections.

The workflow outlines key stages and summarizes details such as the purpose of each stage, testing time period, data used, and method applied.
Calibration coefficients: sensitivity and baseline
The principle of electrochemical sensors is based on the electric signal generated by the electrochemical redox reaction to detect the concentration of the target gas12. Under stable temperature and humidity conditions, and in the absence of cross-interference gases, the electrical signal from the electrochemical sensor will demonstrate a linear response to concentration46. This linearity enables straightforward calibration via linear regression. In this study, the MAS sensor mitigates the effects of temperature and humidity, making the transformation from electric signal to calculated concentration dependent on two key coefficients: sensitivity and baseline. Sensitivity quantifies the signal change per unit change in gas concentration26, while the baseline indicates the zero output of the sensor in the absence of the target gas, serving as a critical reference point47. The traditional calibration function is established using the following equation (Eq. (1)). This calibration requires a side-by-side co-location comparison with an RGM, referred to as “SBS”.
Where:
Conc.: the calculated concentration of the target gas, the unit is [ppb].
Sensitivity: the change in sensor signal per unit changes in gas concentration, the unit is [ppb/mV].
Voltage: the raw electric signal from the sensor, the unit is [mV].
Baseline: the zero output signal when the target gas is not present, the unit is [ppb].
All analyses in this study are based on retrospective calibration using historical data from MAS sensors, which store raw voltage signals, enabling recalculation of pollutant concentrations using sensitivity and baseline coefficients as per Eq. (1). This capability allows us to systematically test various calibration coefficients across historical datasets, as demonstrated in the Hong Kong field trials (2021–2023) and the Shanghai application (2020–2021). The objective is to develop a set of empirical coefficients that is equally applicable to any dataset for the same MAS sensor model. The reliance on stored voltage signals ensures that the calculated concentrations are independent of when the coefficients are determined, as the data accuracy depends solely on the reliability of the sensitivity and baseline coefficients, not the sequence of their application.
Short-term sensitivity test
In preliminary field tests conducted in Hong Kong, 75 different MAS gas sensors underwent a total of 155 co-location trials with RGM from October 2021 to November 2023 at two urban sites regulated by the Hong Kong Environmental Protection Department: Tsuen Wan (22.3733°E, 114.1121°N) and Tseung Kwan O (22.3716°E, 114.1148°N). Each trial lasted for 5 to 10 days, with 60% exceeding 7 days, meeting the requirement of at least 5 days for optimal co-location25. Since some MAS units are not equipped with CO and NO sensors, the final dataset includes 155 NO2 samples, 155 O3 samples, 132 CO samples, and 102 NO samples, providing sufficient data to assess whether a uniform pattern exists among these sensors.
For sensitivity calculation, each sample was processed using Eq. (1) to derive a sensitivity value. These sensitivity values obtained were then used to generate a distribution, with the aim of assessing the consistency of sensitivity across multiple sensors measuring the same gas pollutant.
Long-term baseline test
To investigate the temporal stability of baseline coefficients, data from a long-term co-location test spanning 8 to 14 months were analyzed. These data were obtained from four additional MAS units that had been operating continuously alongside the Tseung Kwan O RGM. Detailed co-location information for these sensors is provided in Table S2. The co-location dataset with reference facilitated the assessment of sensor performance variability, with baseline drift serving as the primary indicator.
For baseline calculation, a monthly b-SBS calibration for each MAS was conducted, producing a new baseline value each month for each MAS. Specifically, the baseline was fitted using Eq. (1) by adjusting the baseline parameter through linear regression against reference concentrations from the RGM, with sensitivity fixed at the median values derived from the short-term sensitivity test. By analyzing the monthly baseline changes of the four MAS, the sensor drift over time could be estimated, enabling the determination of the optimal frequency for baseline recalibration. Note that here we use “drift” to refer to any changes in the baseline of the sensor. In this study, it was specified that if the baseline value change exceeded 5 ppb, that time point would be used as the calibration interval.
The premise: homogeneity assumption
The in-situ calibration method is based on the “homogeneity assumption,” which posits that the air quality characteristics at regulatory RGM sites are representative of conditions experienced at nearby sensor locations within acceptable uncertainty bounds. This assumption is critical for ensuring that sensor baselines can be remotely calibrated using nearby reference data, particularly in low-concentration regimes where atmospheric dispersion and transport enhance spatial uniformity.
To assess spatial homogeneity, we applied the 1st percentile (1P) method, which captures the lowest 1% of pollutant concentrations over specific periods, minimizing the influence of localized emissions and reflecting regional background levels. In this study, 1P values were calculated every month for each RGM site within the study area. When these 1P values converge (e.g., site-to-site differences <10 ppb) across sites, they indicate that these values accurately represent the regional background pollutant levels. In such instances, sensor baselines can be calibrated by computing the 1P from the readings at a specific sensor site and comparing it to the 1P values recorded at the nearest RGM stations. Notably, a single reference site can be used for calibrating multiple MAS units if it is the closest RGM site with comparable atmospheric conditions, especially in cases where sensors are spatially clustered and thus share the same nearest reference site.
We validated this approach using two datasets provided by the China National Environmental Monitoring Center (CNEMC). First, for Shanghai, we analyzed data from 61 RGM sites (10 national sites typically located in non-hotspot areas and 51 provincial sites typically situated in hotspot regions), spanning January 1, 2021, to June 30, 2023 (30 months). Second, to evaluate the method’s transferability, we extended the analysis to another 7 Chinese megacities (Beijing, Chongqing, Wuhan, Hangzhou, Jinan, Fuzhou, Harbin), using data from 8–40 national and 12–74 provincial RGM sites per city, covering June 1, 2023 to August 31, 2024 (15 months). In the Shanghai dataset, we focused on NO2, NO, O3, and CO, while the other 7 cities included only NO2 and O3, to assess spatial homogeneity under diverse urban conditions.
In-situ baseline calibration method
Capitalizing on the premise, we propose a novel baseline calibration method, referred to as “b-SBS”. As elucidated in Eq. (2), a fixed, empirically derived sensitivity constant is systematically assigned to a sensor batch. Then, the baseline values, which are adjustable, will be calibrated using the 1P method.
Where:
Fixed Sensitivity: assigned as a constant, reflecting the same sensitivity for sensors of the same model. The unit is [ppb/mV].
Calibratable Baseline: subject to calibration using the b-SBS method. The unit is [ppb].
Conc. and Voltage: defined as in Eq. (1).
The new b-SBS calibration method ensures that the regression slope accurately reflects the sensor’s practical sensitivity. As detailed in Text S1, this calibration objective distinguishes between the sensor’s sensitivity and the regression slope. This approach enables efficient batch calibration of numerous sensors without the need for co-location with RGM. Additionally, we compared the calibration results using two metrics: the coefficient of determination (R²) and root mean square error (RMSE) statistics, to evaluate whether the new b-SBS method can achieve performance comparable to the traditional SBS method.
Applications in sensor network
The new b-SBS calibration method was applied to a network of 97 MAS deployed across Shanghai, which collected data from August 1, 2020, to August 1, 2021. The Shanghai data (2020–2021) predates the Hong Kong trials (2021–2023), but the same MAS sensor model enables retrospective application of sensitivity parameters from the Hong Kong trials. Baselines were calibrated using the 1P method against the nearest RGM. This serves as proof of concept for the b-SBS method’s in-situ calibration of large-scale sensor networks.
Figure S10 shows the deployment at selected sites, where most MAS devices were mounted on streetlights or utility poles, strategically located near high-emission sources such as factories and ports. This network, combined with data from 61 RGM, covered diverse land use types, including urban, suburban, hotspot, and background areas, as illustrated in Fig. 8.

a Overview of Shanghai’s location in China; b Spatial distribution of the MAS sensor network, CNEMC national regulatory RGM network, and CNEMC provincial regulatory RGM network in Shanghai; c, d A view of two port areas in Shanghai featuring deployments of 10 and 7 sensors, respectively.
Before deployment, all MAS sensors were calibrated in batches at Shanghai Normal University’s air quality monitoring station (121.4100°E, 31.1654°N) using the traditional SBS method through 7-day side-by-side comparisons with RGMs. This calibration achieved an accuracy within ±5 ppb for NO₂, NO, and O₃, and ±50 ppb for CO. The calibration parameters of sensitivity and baseline for each sensor were updated in the MAS sensor’s firmware for concentration calculation. The data collected based on these calibration parameters served as the original concentration measurements. Subsequently, the b-SBS method was applied to the same dataset, which updates the baseline monthly while retaining fixed sensitivity values based on raw voltage signals, to evaluate the improvement in data quality following b-SBS correction. Each sensor was matched to its nearest RGM based on specific criteria: (1) a maximum distance of 50 km; (2) comparable sampling heights within 10 m; and (3) similarity in land use types, defined as matching within the same land use category (e.g., urban, suburban, industrial, rural) based on Google Maps classifications. Consequently, all 97 sensors were matched with appropriate RGMs, with distances ranging from 0.3 to 48 km; 43 sensors (approximately 56%) were within 1.5 km of their corresponding RGMs.
The aim was to determine whether the b-SBS calibration method significantly enhances data quality compared to the traditional calibration strategy. While spatial separation between sensors and RGMs may introduce errors related to spatial concentration variations, this analysis is critical for confirming whether the calibrated sensor network shows an overall enhancement over the original concentration data.
Data availability
The data will be available upon request.
Code availability
Data analysis for this study was conducted using open-source software (Python). The code will be available upon request.
References
Badura, M., Sowka, I., Szymanski, P. & Batog, P. Assessing the usefulness of dense sensor network for PM2.5 monitoring on an academic campus area. Sci. Total Environ. 722, 137867 (2020).
Chen, W. et al. Analysis of an ozone episode in the Greater Bay Area based on low-cost sensor network. Atmos. Environ. 322, 120367 (2024).
Caubel, J. J., Cados, T. E., Preble, C. V. & Kirchstetter, T. W. A distributed network of 100 black carbon sensors for 100 days of air quality monitoring in West Oakland, California. Environ. Sci. Technol. 53, 7564–7573 (2019).
Wei, P. et al. Determination of local traffic emission and non-local background source contribution to on-road air pollution using fixed-route mobile air sensor network. Environ. Pollut. 290, 118055 (2021).
Apte, J. S. & Manchanda, C. High-resolution urban air pollution mapping. Science 385, 380–385 (2024).
Hodgkinson, J. & Tatam, R. P. Optical gas sensing: a review. Meas. Sci. Technol. 24, 012004 (2013).
Sayahi, T. et al. Long-term calibration models to estimate ozone concentrations with a metal oxide sensor. Environ. Pollut. 267, 115363 (2020).
Masson, N., Piedrahita, R. & Hannigan, M. Approach for quantification of metal oxide type semiconductor gas sensors used for ambient air quality monitoring. Sens. Actuators B Chem. 208, 339–345 (2015).
Hagan, D. et al. Calibration and assessment of electrochemical air quality sensors by co-location with regulatory-grade instruments. Atmos. Meas. Tech. 11, 315–328 (2018).
Mead, M. I. et al. The use of electrochemical sensors for monitoring urban air quality in low-cost, high-density networks. Atmos. Environ. 70, 186–203 (2013).
Papaconstantinou, R. et al. Field evaluation of low-cost electrochemical air quality gas sensors under extreme temperature and relative humidity conditions. Atmos. Meas. Tech. 16, 3313–3329 (2023).
Baron, R. & Saffell, J. Amperometric gas sensors as a low cost emerging technology platform for air quality monitoring applications: a review. ACS Sens. 2, 1553–1566 (2017).
Williams, R. et al. Deliberating performance targets workshop: potential paths for emerging PM2.5 and O3 air sensor progress. Atmos. Environ. X 2, 100031 (2019).
Narayana, M. V., Jalihal, D. & Nagendra, S. M. S. Establishing a sustainable low-cost air quality monitoring setup: a survey of the state-of-the-art. Sensors 22, 394 (2022).
Saputra, H. A. Electrochemical sensors: basic principles, engineering, and state of the art. Monatsh Chem. 154, 1083–1100 (2023).
Okorn, K. & Iraci, L. T. An overview of outdoor low-cost gas-phase air quality sensor deployments: current efforts, trends, and limitations. Atmos. Meas. Tech. 17, 6425–6457 (2024).
Fu, J. et al. A machine learning-based approach for fusing measurements from standard sites, low-cost sensors, and satellite retrievals: Application to NO2 pollution hotspot identification. Atmos. Environ. 302, 119756 (2023).
Munir, S., Mayfield, M., Coca, D. & Mihaylova, L. S. A nonlinear land use regression approach for modelling NO2 concentrations in urban areas—using data from low-cost sensors and diffusion tubes. Atmosphere 11, 736 (2020).
Shafran-Nathan, R., Etzion, Y. & Broday, D. M. Fusion of land use regression modeling output and wireless distributed sensor network measurements into a high spatiotemporally-resolved NO2 product. Environ. Pollut. 271, 116334 (2021).
Zimmerman, N. et al. A machine learning calibration model using random forests to improve sensor performance for lower-cost air quality monitoring. Atmos. Meas. Tech. 11, 291–313 (2018).
Bigi, A., Mueller, M., Grange, S. K., Ghermandi, G. & Hueglin, C. Performance of NO, NO2 low cost sensors and three calibration approaches within a real world application. Atmos. Meas. Tech. 11, 3717–3735 (2018).
Han, P. et al. Calibrations of low-cost air pollution monitoring sensors for CO, NO2, O3, and SO2. Sensors 21, 256 (2021).
Miskell, G., Salmond, J. A. & Williams, D. E. Solution to the problem of calibration of low-cost air quality measurement sensors in networks. ACS Sens. 3, 832–843 (2018).
Winter, A. R., Zhu, Y., Asimow, N. G., Patel, M. Y. & Cohen, R. C. A scalable calibration method for enhanced accuracy in dense air quality monitoring networks. Environ. Sci. Technol. 59, 2599–2610 (2025).
Mei, H. et al. Performance validation and calibration conditions for novel dynamic baseline tracking air sensors in long-term field monitoring. Atmos. Meas. Tech. 18, 1771–1785 (2025).
Wei, P. et al. Impact analysis of temperature and humidity conditions on electrochemical sensor response in ambient air quality monitoring. Sensors 18, 59 (2018).
U.S. Environmental Protection Agency. Performance Testing Protocols, Metrics, and Target Values for Ozone Air Sensors (US EPA, 2021).
U.S. Environmental Protection Agency. NO2, CO, and SO2 Supplement to the 2021 Report on Performance Testing Protocols, Metrics, and Target Values for Ozone Air Sensors (US EPA, 2024).
Sun, L., Westerdahl, D. & Ning, Z. Development and evaluation of a novel and cost-effective approach for low-cost NO2 sensor drift correction. Sensors 17, 1916 (2017).
Sun, Y. & Zheng, Y. A method of gas sensor drift compensation based on intrinsic characteristics of response curve. Sci. Rep. 13, 11971 (2023).
Li, J. et al. Characterizing the aging of alphasense NO2 sensors in long-term field deployments. ACS Sens. 6, 2952–2959 (2021).
Malings, C. et al. Fine particle mass monitoring with low-cost sensors: corrections and long-term performance evaluation. Aerosol Sci. Technol. 54, 160–174 (2020).
Pan, J. et al. Spatiotemporal analysis of complex emission dynamics in port areas using high-density air sensor network. Toxics 12, 760 (2024).
Carslaw, D. C., Beevers, S. D., Ropkins, K. & Bell, M. C. Detecting and quantifying aircraft and other on-airport contributions to ambient nitrogen oxides in the vicinity of a large international airport. Atmos. Environ. 40, 5424–5434 (2006).
Cross, E. S. et al. Use of electrochemical sensors for measurement of air pollution: correcting interference response and validating measurements. Atmos. Meas. Tech. 10, 3575–3588 (2017).
Ariyaratne, R. et al. Understanding the effect of temperature and relative humidity on sensor sensitivities in field environments and improving the calibration models of multiple electrochemical carbon monoxide (CO) sensors in a tropical environment. Sens. Actuators B Chem. 390, 133935 (2023).
Hitchman, M. L., Cade, N. J., Gibbs, T. K. & Hedley, N. J. M. Study of the factors affecting mass transport in electrochemical gas sensors. Analyst 122, 1411–1418 (1997).
Stetter, J. R. & Li, J. Amperometric gas sensors—a review. Chem. Rev. 108, 352–366 (2008).
Levy Zamora, M. et al. Evaluating the performance of using low-cost sensors to calibrate for cross-sensitivities in a multipollutant network. ACS EST Eng. 2, 780–793 (2022).
Mijling, B., Jiang, Q., de Jonge, D. & Bocconi, S. Field calibration of electrochemical NO2 sensors in a citizen science context. Atmos. Meas. Tech. 11, 1297–1312 (2018).
Wang, W.-C. V., Lung, S.-C. C. & Liu, C.-H. Application of machine learning for the in-field correction of a PM2.5 low-cost sensor network. Sensors 20, 5002 (2020).
Topalovic, D. et al. In search of an optimal in-field calibration method of low-cost gas sensors for ambient air pollutants: comparison of linear, multilinear and artificial neural network approaches. Atmos. Environ. 213, 640–658 (2019).
Malings, C. et al. Development of a general calibration model and long-term performance evaluation of low-cost sensors for air pollutant gas monitoring. Atmos. Meas. Tech. 12, 903–920 (2019).
Kim, H., Müller, M., Henne, S. & Hüglin, C. Long-term behavior and stability of calibration models for NO and NO2 low-cost sensors. Atmos. Meas. Tech. 15, 2979–2992 (2022).
Sun, Y. et al. High resolution on-road air pollution using a large taxi-based mobile sensor network. Sensors 22, 6005 (2022).
Ouyang, B. First-principles algorithm for air quality electrochemical gas sensors. ACS Sens. 5, 2742–2746 (2020).
Popoola, O. A. M., Stewart, G. B., Mead, M. I. & Jones, R. L. Development of a baseline-temperature correction methodology for electrochemical sensors and its implications for long-term stability. Atmos. Environ. 147, 330–343 (2016).
Acknowledgements
The authors acknowledge the financial support received from the Key Technologies Research and Development Program (2022YFC3702602) and the Research Grants Council of Hong Kong through the General Research Fund (16212022). We also acknowledge the support received from the Guangzhou HKUST Fok Ying Tung Research Institute.
Author information
Authors and Affiliations
Contributions
H.M.: writing—original draft, visualization, methodology, data curation, conceptualization. P.W.: writing—review & editing, validation, methodology, conceptualization. Y.W.: writing—review & editing, software, methodology. M.A.G.: writing—review & editing, investigation. N.K.G.: writing—review & editing, visualization, investigation. Z.N.: writing—review & editing, validation, supervision, methodology, conceptualization.
Corresponding author
Ethics declarations
Competing interests
The authors declare no competing interests.
Additional information
Publisher’s note Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Supplementary information
Rights and permissions
Open Access This article is licensed under a Creative Commons Attribution-NonCommercial-NoDerivatives 4.0 International License, which permits any non-commercial use, sharing, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons licence, and indicate if you modified the licensed material. You do not have permission under this licence to share adapted material derived from this article or parts of it. The images or other third party material in this article are included in the article’s Creative Commons licence, unless indicated otherwise in a credit line to the material. If material is not included in the article’s Creative Commons licence and your intended use is not permitted by statutory regulation or exceeds the permitted use, you will need to obtain permission directly from the copyright holder. To view a copy of this licence, visit http://creativecommons.org/licenses/by-nc-nd/4.0/.
About this article

Cite this article
Mei, H., Wei, P., Wang, Y. et al. In-situ baseline calibration approach for enhanced data quality of large-scale air sensor monitoring networks. npj Clim Atmos Sci 8, 296 (2025). https://doi.org/10.1038/s41612-025-01184-9
Received:
Accepted:
Published:
Version of record:
DOI: https://doi.org/10.1038/s41612-025-01184-9
