
Abstract
Laser cooling typically requires one or more repump lasers to clear dark states, which complicates experimental setups, especially for systems with multiple repumping frequencies. Here, we demonstrate cooling of Be+ ions using a single laser beam, enabled by micromotion-induced one-dimensional heating. By manipulating the displacement of Be+ ions from the trap’s nodal line, we precisely control the ion micromotion velocity, eliminating the necessity of a 1.25 GHz offset repump laser while keeping ions cold in the direction perpendicular to the micromotion. We use two equivalent schemes, cooling laser detuning and ion trajectory imaging to measure the speed of the Be+ ions, with results accurately reproduced by molecular dynamics simulations based on a machine learned time-dependent electric field inside the trap. This work provides a robust method to control micromotion velocity of ions and demonstrates the potential of micromotion-assisted laser cooling to simplify setups for systems requiring multiple repumping frequencies.

Similar content being viewed by others


Introduction
In radio frequency (RF) ion trap physics, micromotion arises from ions responding to the periodic driving forces of RF fields1,2,3. At the geometric center of the trap, known as the nodal line, the electric field intensity is zero, minimizing ion micromotion. However, as ions are displaced from the nodal line, the amplitude of their micromotion increases, a phenomenon referred to as excess micromotion4,5,6,7. Precise control of micromotion is crucial in quantum information processing (QIP)8,9,10,11,12 and precision measurement experiments13,14. Techniques such as micromotion compensation7,15, pulsed cooling5, artificial neural networks16, Ramsey interferometry17, cross-correlation1,6,18 and resolved sideband19,20,21 are employed to measure and reduce the micromotion.
In specific experiments, enhancing the micromotional states of ions proves to be beneficial. For instance, in QIP, certain non-adiabatic entanglement gates exploit ion micromotion to boost quantum entanglement fidelity22, or to enable precise laser targeting of individual ions23. Moreover, research utilizing RF-driven micromotion ions as self-sustained oscillators24,25, as well as in precision measurements, such as calculating the second-order Doppler frequency shift for atomic clocks based on large ion ensembles, necessitates strict control over micromotion velocity throughout the entire ion trap26,27,28. In studies of chemical collision processes, managing ion velocities within the trap to adjust collision energies provides valuable insights into chemical reaction dynamics29,30,31. Consequently, the impact of micromotion on experimental outcomes varies according to the objectives of the study, necessitating optimized control based on specific requirements.
The concept of “cooling by heating” involves increasing the occupation of a mode that couples the system to a cold bath, suggesting the potential use of incoherent thermal light sources or unfiltered sunlight to cool a quantum system32,33,34. Broadband lasers or femtosecond lasers that produce a wide spectrum of light are employed to address multiple energy level transitions, achieving broadband vibrational or rotational optical cooling35,36,37. These approaches could aid in the laser cooling of complex systems, such as molecular ions, where the intricate vibrational and rotational energy level structures make direct laser cooling challenging38,39.
Here, we propose cooling Be+ ions by utilizing one-dimensional micromotion heating of ions in a RF linear quadrupole ion trap (LQT). The velocity of ion oscillations facilitates a scanned laser detuning due to the Doppler effect, allowing a single laser beam to cover multiple transition energy levels, thereby reducing the number of required lasers. Micromotion information is characterized by the detuning of cooling lasers and imaging the trajectories of the ions. The results were validated through a molecular dynamics (MD) simulation based on an electric field surface that was constructed by machine learning from the data of COMSOL simulations of the actual experimental conditions. In the following sections, we will detail the experimental setup, discuss methods to control and characterize the motion of the ions, and present the results along with theoretical simulations and discussions.
Results and discussion
Ion displacement in the X-Direction (D X)
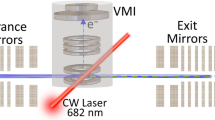
In the following experiments, we first loaded and laser-cooled approximately 5 Be+ ions at the nodal line of the LQT, defined as position 0, as shown in Fig. 1a. This schematic of the experiment setup is provided to introduce the relative directions of the cooling laser, imaging system, and micromotion. The cooling lasers are in the X-Z plane at a 45-degree angle to the X-axis, which is perpendicular to the Y-axis. The imaging system is parallel to the Y-Z plane, and perpendicular to the X-axis. Therefore, micromotion in the X-direction cannot be detected by the imaging system, but it can influence cooling laser detuning frequency. Conversely, micromotion in the Y-direction is detectable by the imaging system but does not affect the cooling laser frequency, as illustrated in Fig. 1b.

a Voltage configuration on the linear quadrupole ion trap electrodes: DC is applied to four central electrodes (\({U}_{i}\)) and all the eight endcaps (\({U}_{{{\rm{end}}}}\)). RF and DC voltages are added to electrodes 2 and 3 with the expression \({U}_{i}+{U}_{{{\rm{rf}}}}\cos (\Omega t)\), where i corresponds to 1, 2, 3, or 4. The cooling lasers are positioned in the X-Z plane at a 45-degree angle to the X-axis, which is perpendicular to the Y-axis. b Side view of the LQT: The imaging system is oriented parallel to the Y-Z plane and perpendicular to the X-axis. Micromotion in the Y-direction is measurable by the imaging system, but not in the X-direction. The images linked by the red/black dashed lines are taken when the ions are displaced in the Y/X direction, respectively.
We moved the ions along the X-direction by applying DC voltages (\({U}_{i}\)) to specified electrodes. For example, by applying higher voltages to electrodes 2 and 4, the ions were pushed closer (positive) to the camera. We observed that the ions appeared dumbbell-shaped in the camera (Fig. 2a). As the ions move away from the nodal line of the ion trap along the X-axis, no significant detuning shift in the cooling laser frequency is observed, as shown in Fig. 2b. The ions remain cold in the X-Z plane, with temperatures below 300 mK (Ek/kb). This indicates that ion motional heating direction is mainly in the Y-axis, as the cooling laser is perpendicular to the Y-direction. The recorded ion motional length (Fig. 2a) increases with X-displacement (DX), exhibiting a linear relationship at a rate of 0.21 (μm) μm-1, as illustrated in Fig. 2d (black dot and linear fit).

a Typical ion fluorescence images at different X-displacements. The motional length of ions is determined by calculating the number of pixels corresponding to the ion fluorescence. Larger displacement results in longer motional length of the ions (greater motional heating). b Cooling laser detuning at different X-displacements. The detuning of the cooling laser frequency increases slightly when the ions are displaced in the X-direction from 0 to 680 μm. c Schematic of ion motional position as a function of time, \({{\rm{Y}}}\left(t\right)=A\sin \left(\Omega t+{\varphi }_{0}\right)\). d Cooling with repumping. The error bars represent the standard error of 5 individual measurements, and strong linear fitting results in a narrow 95% confidence interval, which is smaller than the data points. Black dots: The length of the ion trajectory (2A) as a function of X-displacement. A linear fit yields 0.214 ± 0.003 (μm) μm−1 and −0.218 ± 0.003 (μm) μm−1 in different directions. Red squares: Maximum velocity \(\left({v}_{{mY}}=\Omega A\right)\) as a function of displacement in the X-direction (DX). The linear fit, \({v}_{{mY}}={\eta }_{X}{D}_{X}\), shows \({\eta }_{X}=\) 2.12 ± 0.01 (m s−1) μm−1.
Here, the ion motional velocity is calculated from the length (2A) of the oscillating trajectory (shown in Fig. 2a). The position of the ions Y(t) is: \({{\rm{Y}}}\left(t\right)=A\sin \left(\Omega t+{\varphi }_{0}\right)\), which is shown in Fig. 2c. Hence, the velocity of the ions in the Y-direction \({v}_{Y}\left(t\right)\) is:
The maximum Y-velocity of the ion is:
The data is shown as red squares in Fig. 2d. By employing Eq. (2), a linear fit of the experimental data gives \({\eta }_{X}=\) 2.12 ± 0.01 (m s−1) μm−1, which means the maximum Y-velocity increases up to 1461 m s−1 with the X-displacement of the ions at a rate of 2.12 ± 0.01 (m s−1) μm−1. When the cooling laser is perpendicular to the motional heating direction, although the velocity of the ions changes due to the micromotion, the population of the excited state remains unchanged. This setup can be particularly useful in the study of state-dependent collisions or temperature-controlled chemical reactions.
Ion displacement (D Y) in the Y-direction
We repeated the above experimental process and then moved the ions along the Y-direction. Note that the cooling lasers are at a 45-degree angle to the X-axis, and the imaging system is perpendicular to the X-axis. As the ions displaced (DY) further from the trap nodal line, the ions remained visible as clear bright spots from the camera (Insert images of Fig. 3a, c). However, the cooling laser detuning increased from 11 MHz to 2.7 GHz, with the ions moved from −583 μm to 583 μm, at a rate of 46 MHz μm−1 (Fig. 3d). This indicates that the micromotion speed of the ions gradually increases mainly in the X-direction.

a, c Typical ions’ fluorescence images at different Y-displacements and the corresponding cooling laser detuning. Larger displacement results in higher cooling laser detuning (greater motional heating). The trap nodal line is defined as position 0. a Cooling with repumping. Inserted images show ions at the trap nodal line (0 μm), positive 210 μm, and 432 μm in the Y-direction, corresponding to 0.01 GHz, 1.09 GHz, and 2.00 GHz, respectively. b Numerical solution (We assume that both \(n\) and \(\alpha\) are 1) of Eq. (4) at different values of detuning and maximum speeds. Theoretical peaks are all shifted by about −5 MHz to overlap with experimental results, and the rightmost data is multiplied by a factor of 0.2. c Cooling without repumping. Inserted images show ions at 133 μm, 370 μm, and 593 μm in the positive Y-direction, corresponding to 0.63 GHz, 1.74 GHz, and 2.80 GHz, respectively. d, e Relationship among Y-displacement, cooling laser detuning, and maximum velocity in X-direction. The error bars represent the standard error of 5 individual measurements, and strong linear fitting results in a narrow 95% confidence interval, which is smaller than the data points. d Cooling with repumping. Black dots: Cooling laser detuning \((\delta )\) as a function of Y-displacement (DY). A linear fit yields 4.63 ± 0.03 MHz μm−1 and −4.65 ± 0.02 MHz μm−1 in different directions. Red squares: Maximum velocity (\({v}_{mX}\)) as a function of displacement (DY). The linear fit, \({v}_{{{\rm{mX}}}}={\eta }_{Y}{D}_{Y}\), shows \({\eta }_{Y}=\) 2.06 ± 0.01 (m s−1) μm−1. e Cooling without repumping. Black dots: Cooling laser detuning \((\delta )\) as a function of Y-displacement (DY). A linear fit yields 4.64 ± 0.06 MHz μm−1 and −4.58 ± 0.04 MHz μm−1 in different directions. Red squares: Maximum velocity (\({v}_{mX}\)) as a function of displacement (DY). The linear fit, \({v}_{{mX}}={{\eta }^{{\prime} }}_{Y}{{{\rm{D}}}}_{{{\rm{Y}}}}\), shows \({{\eta }^{{\prime} }}_{Y}=\) 2.05 ± 0.01 (m s−1) μm−1. f Energy level diagram of Be+. F = 1 and F = 2: The hyperfine structure of Be+ in the ground state. Red solid line: frequency shift due to the Doppler effect of the ion’s micromotion. Red/Blue dashed line: red/blue detuning during cooling via ion motional heating. The purple area indicates the region where the 2S1/2 (F = 1) → 2P3/2 transition occurs within one period. When sufficient micromotion-induced Doppler shift (\(+{\omega }_{{{\rm{micro}}}{{\rm{mo}}}{{\rm{tion}}}}\)) spans the two ground-state energy levels of Be+, cooling without repumping is achieved, see also Supplementary Note 1 for more details.
When the cooling laser detuning exceeds 625 MHz (DY ≥ 133 μm), the micromotion-induced Doppler shift (±625 MHz) can span the two ground-state energy levels (1.25 GHz) of Be+ (Fig. 3f and Supplementary Note 1), effectively functioning as a repumper, allowing the ions to be cooled without repumping (Fig. 3c, e). The maximum displacement, detuning, and velocity in the trap are constrained by the size and position of the cooling laser spot. By adjusting the cooling laser position as the ions move, we can achieve up to 7.0 GHz laser detuning, which can cover energy levels up to 14.0 GHz without repumping (see in Supplementary Note 2).
Here, the ion micromotion velocity is determined from the cooling laser detuning. The micromotion, driven by the RF, induces a Doppler shift that modulates the ions’ fluorescence rate (\(\kappa\)), which can be expressed as18:
Where \(\Gamma\)/2π = 19.4 MHz is the natural linewidth of Be+ 2P3/2 state, Ω/2π = 3 MHz is the trap frequency. \({v}_{{{\rm{m}}}}\) represents the maximum velocity of the ions in the direction of the cooling laser and we define the direction of excess micromotion opposite to the laser direction as the positive velocity direction, \({\varphi }_{0}\) is the phase determined by the initial position of the ions relative to the driving field, c is the speed of light, ω0 refers to the transition frequency of Be+, which includes the frequency of 2S1/2(F = 1) → 2P3/2 transition (\({\omega }_{{{\rm{F}}}=1}\)) and the frequency of 2S1/2(F = 2) → 2P3/2 transition (\({\omega }_{{{\rm{F}}}=2}\)). ω is the laser output frequency. We defined \(\delta ={\omega }_{{{\rm{F}}}=2}-\omega\) which refers to the cooling laser detuning. The fluorescence intensity of ions obtained by the camera (Fluo) is:
Where \(n\) denotes the number of the ions, and α is the total efficiency of imaging system, determined by the solid angle covered by the reentrant objective, the quantum efficiency of the camera at 313 nm, the exposure time (\({t}_{\exp }\)), and the camera’s gain. The fluorescence intensity of the ions captured by the camera is strongest when the velocity of the ion is maximum (\(\delta =\frac{\omega {{{\boldsymbol{v}}}}_{{{\bf{m}}}}}{{{\bf{c}}}}\), as shown in Fig. 3a, c). The calculated results from Eq. (4) are shown in Fig. 3b. The theoretical peaks overlap with the experimental fluorescence peaks by shifting only about 5 MHz, validating that the maximum velocity corresponds to the highest fluorescence of the ions. In the no-repumping case shown in Fig. 3c, the peak is broader but still corresponds to the maximum velocity. This is because the overall cooling rate is lower compared to when the repumper laser is used. For the 2S1/2 (F = 2) → 2P3/2 transition, the laser is red detuned with the aid of excess micromotion, providing cooling throughout one period. For the 2S1/2 (F = 1) → 2P3/2 transition, excess micromotion allows the laser to be either near-red-detuned or near-blue-detuned, resulting in both heating and cooling within one period, effectively functioning as a repumper. While in the case with the repumper, both pump and repump lasers cool the ions when the maximum velocity is achieved. See the Supplementary Note 1 for more details on the cooling scheme without the repumping laser.
Note that the direction of the ion micromotion is at an angle of θ = 45° to the cooling laser frequency in this experiment. Hence:
Where \({v}_{{mX}}\) is the ions’ maximum velocity in X-direction. The measured data are shown as the red squares in Fig. 3d. The linear fit of the experimental data gives \({\eta }_{Y}=2.06\pm 0.01\), which means the ion maximum X-velocity increases with the Y-displacement at a rate of 2.06 ± 0.01 (m s−1) μm−1. The velocity of the ions at any times, \({v}_{X}\left(t\right)\), can then be written as:
The fitted \({\eta }_{Y}\) is close to \({\eta }_{X}\), indicating that the trap electrical field is symmetric. When the displacements in X and Y directions are the same, the corresponding velocities are similar, and the micromotion heating is primarily in one direction. When the direction of motional heating is perpendicular to the direction of the cooling laser, the detuning remains constant, necessitating the use of repumping lasers in the first case.
Theoretical results
MD simulations were performed to simulate the ion motion on the time-dependent electric field surface, E(X, Y, Z, t). First, the accuracy of constructed electric field surface is shown in Supplementary Note 3. The absolute error of the constructed electric field surface is below 1.5 V m−1, indicating the accuracy and capability of the adopted neural network method in reproducing accurate model of the electric field surface.
In the MD simulation, the displacement of the ions was implemented by a constant electrostatic field, which exerts an additional force (\({{{\bf{F}}}}_{{{\rm{static}}}}\)) on the ions and pushes them away from the nodal line of the trap. Figure 4a shows the electric field vectors on the 2D X-Y plane (for the temporal evolution of the electric field see Supplementary Movie 1). The micromotion of the ions is driven by the trapping force \({{{\bf{F}}}}_{{{\rm{Trap}}}}=q{{\bf{E}}}(X,Y,Z,t)\). It is straightforward to visualize an additional force on the ions when they are displaced away from the nodal line. The ions then undergo large amplitude micromotion. Specifically, when the ions are displaced along the X-axis, they oscillate harmonically in the perpendicular Y-direction with a frequency of the trapping RF field. Similarly, when the ions are displaced along the Y-axis, they oscillate harmonically in the perpendicular X-direction. When the ions are displaced along the diagonal directions (aligning 45 degrees to the X or Y axis), they oscillate in the same parallel direction. Furthermore, as shown in Fig. 4b, c, when the ions are displaced further away from the nodal line, the ions experience a larger electric field and thus undergo a larger amplitude of oscillation and a larger velocity change.

a Electric field vectors at an arbitrary time and the micromotion of Be+ ions on the 2D X-Y plane cut at Z = 0. The electric field is obtained by the neural network model. Trajectories of Be+ ions at different positions are denoted by dashed lines and the Be+ ions are represented as black spheres. b The ion positions with respect to time when Be+ ions are displaced away from the nodal line by distances of 350 μm and 700 μm. c Theoretical analysis of the velocity of the Be+ ions over one oscillation cycle when they were displaced away from the nodal line by distances of 350 μm and 700 μm. d Comparison of theoretical and experimental results of the maximum velocities at different displacements. The error bars represent the standard error of 5 individual measurements, and they are smaller than the data points. Black dots and red dots denote the ion velocity obtained by experimental measurements of cooling laser detuning (\({\eta }_{Y}=\) 2.06 ± 0.01 (m s-1) μm-1) and the length of the ion trajectory (\({\eta }_{X}=\) 2.12 ± 0.01 (m s-1) μm-1), respectively. Blue line denotes the simulated ion maximum velocity (\({v}_{{mYs}}\)) with respect to the displacement (DY) and yields a rate of \({\eta }_{{Ys}}=\) 2.07 (m s-1) μm-1. The comparison of theoretical and experimental results shows a good agreement.
It is worth noting in the enlarged view in Fig. 4c that the ions also experience slight heating in the Y-direction when they are displaced in the Y direction. It should also be noted that the oscillation frequency in the Y direction is twice of the RF trapping field. Supplementary Note 4, 5 and 6 show more detailed trajectories of the ions. In both simulation results, the trajectory of the ion is an arc instead of a straight line, and the height of the arc is about 1.4% of the width. This is too small to be observed in the ion images from the experiment (Fig. 3a), but evidence can be found in the experimental results in Fig. 2b, where a slight shift in cooling laser detuning is observed when the ions are displaced in the X direction, indicating slight heating in the X direction.
To quantitatively compare with experimental observations, the maximum velocity (\({v}_{{mXs}}\)) of ion motion at different Y-displacements (DY) were calculated, as shown in Fig. 4d. The simulated results (blue line) give a rate of \({\eta }_{{Ys}}=\) 2.07 (m s-1) μm-1, which agrees well with the experimental measurements from cooling laser detuning (\({\eta }_{Y}=\) 2.06 ± 0.01 (m s-1) μm-1) and imaging of ion trajectories (\({\eta }_{X}=\) 2.12 ± 0.01 (m s-1) μm-1), respectively. This good agreement confirms the equivalence of the two experimental measurements.
Conclusion
In this study, we achieved two-dimensional laser cooling of Be+ ions without the need for repumping by utilizing one-dimensional motional heating. The results were analyzed using cooling laser detuning and imaging of the ion trajectories, both of which yielded consistent results. We combined finite element analysis with machine learning methods to outline the electric field variations in the ion trap, accurately determining the actual electric field information in the trap and revealing the relationship between the micromotion direction and the confinement field vector. The simulation results were consistent with the experimental findings, providing a reliable theoretical method for exploring the dynamic behavior of ions in traps.
The present findings indicate that when the micromotion vector aligns with the cooling laser axis, the Doppler shift effectively broadens the working frequency range of the cooling laser. When the shifting covers the repumping frequency, single-laser cooling of Be+ ions is readily accomplished. In this work, the laser beam is set at an \({{\rm{\theta }}}=45^{\circ }\) angle to the direction of excess micromotion. If we decrease this angle, the micromotion-induced Doppler shift will increase, making it more effectively work for other species (171Yb+) and complex systems. This is particularly beneficial for cooling the other ions or molecular systems where direct laser cooling is challenging due to the intricate energy structures. Additionally, the micromotion heating is mainly in one direction, allowing for precision measurements in the direction orthogonal to the micromotion. However, the limitation to only two-dimensional cooling restricts the amplification of this scheme. Additionally, this approach requires the ions to maintain excess micromotion with consistent direction and amplitude, which currently confines the proposed method to linear ion chains.
Overall, this work not only provides a robust method for managing ion micromotion velocity but also offers insights into laser cooling of complex systems that typically require multiple repumping lasers. Furthermore, it offers a method for controlling collision energy in state-dependent ion-molecule reaction investigations.
Methods
Experimental methods
The experimental setup in this study has been described in detail elsewhere40,41,42,43, only a brief description is provided here. Radial confinement is formed by four central electrodes, with two diagonally opposite electrodes subjected to both direct current (DC) and RF voltages with a peak-to-peak amplitude of \({U}_{{{\rm{rf}}}}\) = 324 Vpp and a frequency of Ω/2π = 3 MHz, while the remaining two diagonally opposite electrodes are subjected to only DC voltages. Axial confinement is provided by the eight segments at both ends with DC voltages (\({U}_{{{\rm{end}}}}\)). The radius of the ion trap is r0 = 6.85 mm, and the radius of each electrode is R = 4.51 mm. The trap is enclosed in a UHV chamber of \( < 8\times {10}^{-11}\) Torr. Be+ ions are generated by laser ablation of metallic beryllium using a focused nanosecond pulsed laser operating at about 2 mJ at 1064 nm and subsequently trapped in the linear Paul trap. The trapped Be+ ions are then laser-cooled on the 2S1/2 (F = 2) → 2P3/2 transition with a 313 nm laser (TOPTICA TA-FHG pro). To prevent decay to the 2S1/2 (F = 1) state, a repump laser beam, detuned by −1.250 GHz from the cooling laser via acousto-optic modulators (AOMs), is applied to repump population back into the Doppler cooling cycle. Both laser beams, each with a power of 25 mW and a beam waist of 1.4 mm at the trap center, are linearly polarized. These two laser beams are combined into a single beam, which is set at a 45-degree angle to the trap’s radial direction. But for experiments without repumping laser, the AOM was turned off. The imaging system consists of an electron-multiplying CCD camera (Andor Ultra 888), along with an 8-fold magnification (calibrated by a stage micrometer) objective lens and a single-band bandpass filter positioned parallel to the Y-Z plane. The resolution of the camera is 13 × 13 μm/pixel, resulting in an actual image resolution of 1.625 μm/pixel. The exposure time of the camera is maintained at 300 ms in this experiment.
Molecular dynamics simulations
The trapped Be+ ions experience multiple forces inside the linear quadrupole Paul trap, and the forces are expressed as follows44:
where \({{{\bf{F}}}}_{{{\rm{Trap}}}}\) is the trapping force, \({{{\bf{F}}}}_{{{\rm{Static}}}}\) is the constant electrostatic force, the laser cooling force is modeled by a damping force \({{{\bf{F}}}}_{{{\rm{Cooling}}}}=-\alpha \cdot {{\boldsymbol{v}}}\) with \(\alpha\) as the damping coefficient and \({{\boldsymbol{v}}}\) as the ion velocity, and the Coulomb force \({{{\bf{F}}}}_{{{\rm{Coulomb}}}}\) is the repulsive force from the other ions in the trap. The Coulomb force on the i-th ion has the following form,
where \({Q}_{i}\) and \({Q}_{j}\) are the ion charges, \({r}_{{ij}}\) is the distance between ions i and j, \({\hat{{{\bf{r}}}}}_{{ij}}\) is the unit vector pointing from ion j to ion i, and ε0 is the vacuum permittivity.
The motion of the trapped Be+ ions were simulated by MD, which has been proved to be a highly effective tool for studying ion Coulomb crystals44,45,46,47,48,49, ion trajectories50,51,52 and reaction mechanisms53,54. By solving classical equations of motion with the forces in Eq. (7), the trajectories of Be+ ions as well as their velocity and temperatures can be calculated48,49,55,56,57.
While the last three forces in Eq. (7) are straightforward to consider, an accurate modeling of the trapping force \({{{\bf{F}}}}_{{{\rm{Trap}}}}\) plays a crucial role for the description of the motion of the Be+ ions and thus poses some challenges. Traditionally, analytical expression can be used6,44,57,
where \({r}_{0}\) and \({z}_{0}\) are the characteristic dimensions of the trap along the radial (\({\hat{{{\bf{e}}}}}_{X}\), \({\hat{{{\bf{e}}}}}_{Y}\)) and axial (\({\hat{{{\bf{e}}}}}_{Z}\)) directions, respectively. \({U}_{{{\rm{rf}}}}\) and \({U}_{{{\rm{end}}}}\) are the amplitudes of the RF and DC voltages on the poles, respectively. \(\Omega\) is the radio frequency. Normally, additional correction parameters (\({k}_{r}\) and \({k}_{z}\)) are used to consider the structure of the actual Paul trap and the voltages on the trap44.
Besides the analytic model potential, a realistic trapping potential has been developed by fitting from discrete potential data set49,58. Machine leaning is often used to fit highly accurate potentials in chemical dynamics studies and has also been used to study ion traps59. Here, we employed the machine learning method to accurately model the trapping field (derivative of the trapping potential) of the actual experiment. In order to quantitatively compare with experimental results, we here constructed a time-dependent electric field surface E(X, Y, Z, t) by training a neural network model (shown in Supplementary Note 7) with the dataset of discrete electric field values inside the linear Paul trap. The training dataset were obtained by accurate COMSOL simulations, which accurately considered the geometry of the electrode rods and endcap, their relative positions, and the exerted electric potentials of the actual linear Paul trap.
Data availability
The original data for Figs. 2, 3, 4 in the article can be found in Supplementary Data 1, while the original data for Figs. S2–S6 in the Supplementary Information can be found in Supplementary Data 2. In the MD simulation, the trajectory of the ion displaced from the trap center is provided in Supplementary Movie 1. The other data that support the findings of this study are available from the corresponding author upon reasonable request.
References
Zhukas, L. A., Millican, M. J., Svihra, P., Nomerotski, A. & Blinov, B. B. Direct observation of ion micromotion in a linear Paul trap. Phys. Rev. A 103, 023105 (2021).
Leibfried, D., Blatt, R., Monroe, C. & Wineland, D. Quantum dynamics of single trapped ions. Rev. Mod. Phys. 75, 281–324 (2003).
Drewsen, M. & Brøner, A. Harmonic linear Paul trap: stability diagram and effective potentials. Phys. Rev. A 62, 045401 (2000).
Herskind, P. F., Dantan, A., Albert, M., Marler, J. P. & Drewsen, M. Positioning of the rf potential minimum line of a linear Paul trap with micrometer precision. J. Phys. B At. Mol. Opt. Phys. 42, 154008 (2009).
Kato, A., Nomerotski, A. & Blinov, B. B. Micromotion-synchronized pulsed Doppler cooling of trapped ions. Phys. Rev. A 107, 023116 (2023).
Berkeland, D. J., Miller, J. D., Bergquist, J. C., Itano, W. M. & Wineland, D. J. Minimization of ion micromotion in a Paul trap. J. Appl. Phys. 83, 5025–5033 (1998).
Du, L. J. et al. Compensating for excess micromotion of ion crystals*. Chin. Phys. B 24, 083702 (2015).
Roos, C. Quantum Information Processing with Trapped Ions. in Fundamental Physics in Particle Traps (eds W. Quint & M. Vogel) 253–291 (Springer Berlin Heidelberg, 2014).
Wang, S. T., Shen, C. & Duan, L. M. Quantum computation under micromotion in a planar ion crystal. Sci. Rep. 5, 8555 (2015).
Wu, Y. K., Liu, Z. D., Zhao, W. D. & Duan, L. M. High-fidelity entangling gates in a three-dimensional ion crystal under micromotion. Phys. Rev. A 103, 022419 (2021).
Bond, L., Lenstra, L., Gerritsma, R. & Safavi-Naini, A. Effect of micromotion and local stress in quantum simulations with trapped ions in optical tweezers. Phys. Rev. A 106, 042612 (2022).
Yu, Q. et al. Feasibility study of quantum computing using trapped electrons. Phys. Rev. A 105, 022420 (2022).
Rosenband, T. et al. Frequency ratio of Al+ and Hg+ single-ion optical clocks; metrology at the 17th decimal place. Science 319, 1808–1812 (2008).
Margolis, H. S. et al. Hertz-Level measurement of the optical clock frequency in a single 88Sr+ Ion. Science 306, 1355–1358 (2004).
Lee, W. et al. Micromotion compensation of trapped ions by qubit transition and direct scanning of dc voltages. Opt. Express 31, 33787–33798 (2023).
Liu, Y. et al. Minimization of the micromotion of trapped ions with artificial neural networks. Appl. Phys. Lett. 119, 134002 (2021).
Higgins, G. et al. Micromotion minimization using Ramsey interferometry. New J. Phys. 23, 123028 (2021).
Wang, B., Zhang, J. W., Lu, Z. H. & Wang, L. J. Direct measurement of micromotion speed in a linear quadrupole trap. J. Appl. Phys. 108, 013108 (2010).
Chuah, B. L., Lewty, N. C., Cazan, R. & Barrett, M. D. Detection of ion micromotion in a linear Paul trap with a high finesse cavity. Opt. Express 21, 10632–10641 (2013).
Raab, C. et al. Motional sidebands and direct measurement of the cooling rate in the resonance fluorescence of a single trapped ion. Phys. Rev. Lett. 85, 538–541 (2000).
Zhiqiang, Z., Arnold, K. J., Kaewuam, R. & Barrett, M. D. 176Lu+ clock comparison at the 10-18 level via correlation spectroscopy. Sci. Adv. 9, 1971 (2023).
Ratcliffe, A. K., Oberg, L. M. & Hope, J. J. Micromotion-enhanced fast entangling gates for trapped-ion quantum computing. Phys. Rev. A 101, 052332 (2020).
Lysne, N. K., Niedermeyer, J. F., Wilson, A. C., Slichter, D. H. & Leibfried, D. Individual addressing and state readout of trapped ions utilizing radio-frequency micromotion. Phys. Rev. Lett. 133, 033201 (2024).
Kaplan, A. E. Single-particle motional oscillator powered by laser. Opt. Express 17, 10035–10043 (2009).
Saito, R. & Mukaiyama, T. Generation of a single-ion large oscillator. Phys. Rev. A 104, 053114 (2021).
Meis, C., Desaintfuscien, M. & Jardino, M. Analytical calculation of the space charge potential and the temperature of stored ions in an rf quadrupole trap. Appl. Phys. B 45, 59–64 (1988).
Miao, S. N. et al. Second-order Doppler frequency shifts of trapped ions in a linear Paul trap. Phys. Rev. A 106, 033121 (2022).
Vahala, K. et al. A phonon laser. Nat. Phys. 5, 682–686 (2009).
Puri, P. et al. Reaction blockading in a reaction between an excited atom and a charged molecule at low collision energy. Nat. Chem. 11, 615–621 (2019).
Hall, F. H. J. & Willitsch, S. Millikelvin reactive collisions between sympathetically cooled molecular ions and laser-cooled atoms in an ion-atom hybrid trap. Phys. Rev. Lett. 109, 233202 (2012).
Hall, F. H. J. et al. Ion-neutral chemistry at ultralow energies: dynamics of reactive collisions between laser-cooled Ca+ ions and Rb atoms in an ion-atom hybrid trap. Mol. Phys. 111, 2020–2032 (2013).
Mari, A. & Eisert, J. Cooling by heating: very hot thermal light can significantly cool quantum systems. Phys. Rev. Lett. 108, 120602 (2012).
Younes, A. & Campbell, W. C. Laser-type cooling with unfiltered sunlight. Phys. Rev. E 109, 034109 (2024).
Cleuren, B., Rutten, B. & Van den Broeck, C. Cooling by heating: refrigeration powered by photons. Phys. Rev. Lett. 108, 120603 (2012).
Lien, C. Y. et al. Broadband optical cooling of molecular rotors from room temperature to the ground state. Nat. Commun. 5, 4783 (2014).
Sofikitis, D. et al. Vibrational cooling of cesium molecules using noncoherent broadband light. Phys. Rev. A 80, 051401 (2009).
Sofikitis, D. et al. Molecular vibrational cooling by optical pumping with shaped femtosecond pulses. New J. Phys. 11, 055037 (2009).
Viteau, M. et al. Optical pumping and vibrational cooling of molecules. Science 321, 232–234 (2008).
Nguyen, J. H. V. et al. Challenges of laser-cooling molecular ions. New J. Phys. 13, 063023 (2011).
Schowalter, S. J., Chen, K., Rellergert, W. G., Sullivan, S. T. & Hudson, E. R. An integrated ion trap and time-of-flight mass spectrometer for chemical and photo- reaction dynamics studies. Rev. Sci. Instrum. 83, 043103 (2012).
Schneider, C., Schowalter, S. J., Chen, K., Sullivan, S. T. & Hudson, E. R. Laser-cooling-assisted mass spectrometry. Phys. Rev. Appl. 2, 034013 (2014).
Puri, P. et al. Synthesis of mixed hypermetallic oxide BaOCa+ from laser-cooled reagents in an atom-ion hybrid trap. Science 357, 1370–1375 (2017).
Yang, T. G. et al. Optical control of reactions between water and laser-cooled Be+ Ions. J. Phys. Chem. Lett. 9, 3555–3560 (2018).
Zhang, C. B., Offenberg, D., Roth, B., Wilson, M. A. & Schiller, S. Molecular-dynamics simulations of cold single-species and multispecies ion ensembles in a linear Paul trap. Phys. Rev. A 76, 012719 (2007).
Willitsch, S., Bell, M. T., Gingell, A. D. & Softley, T. P. Chemical applications of laser- and sympathetically-cooled ions in ion traps. Phys. Chem. Chem. Phys. 10, 7200 (2008).
Du, L. J. et al. Determination of ion quantity by using low-temperature ion density theory and molecular dynamics simulation*. Chin. Phys. B 24, 113703 (2015).
Kiesenhofer, D. et al. Controlling two-dimensional coulomb crystals of more than 100 ions in a monolithic radio-frequency trap. PRX Quantum 4, 020317 (2023).
Okada, K., Wada, M., Takayanagi, T., Ohtani, S. & Schuessler, H. A. Characterization of ion Coulomb crystals in a linear Paul trap. Phys. Rev. A 81, 013420 (2010).
Poindron, A., Pedregosa-Gutierrez, J., Jouvet, C., Knoop, M. & Champenois, C. Non-destructive detection of large molecules without mass limitation. J. Chem. Phys. 154, 184203 (2021).
Gloger, T. F. et al. Ion-trajectory analysis for micromotion minimization and the measurement of small forces. Phys. Rev. A 92, 043421 (2015).
Rajkovic, M., Benter, T. & Wißdorf, W. Molecular dynamics-based modeling of ion-neutral collisions in an open ion trajectory simulation framework. J. Am. Soc. Mass Spectrom. 34, 2156–2165 (2023).
Forbes, M. W., Sharifi, M., Croley, T., Lausevic, Z. & March, R. E. Simulation of ion trajectories in a quadrupole ion trap: a comparison of three simulation programs. J. Mass Spectrom. 34, 1219–1239 (1999).
Shen, L. & Yang, W. Molecular dynamics simulations with quantum mechanics/molecular mechanics and adaptive neural networks. J. Chem. Theory Comput. 14, 1442–1455 (2018).
Zeng, J. Z., Cao, L. Q., Xu, M. Y., Zhu, T. & Zhang, J. Z. H. Complex reaction processes in combustion unraveled by neural network-based molecular dynamics simulation. Nat. Commun. 11, 5713 (2020).
Zhang, H. S., Zhou, Y. Z., Shen, Y. & Zou, H. X. Simulation of Coulomb crystal structure and motion trajectory of calcium ions in linear ion trap. Acta Phys. Sin. 72, 013701 (2023).
Meng, Y. S. & Du, L. J. Study on the high-efficiency sympathetic cooling of mixed ion system with a large mass-to-charge ratio difference in a dual radio-frequency field by numerical simulations. Eur. Phys. J. D 75, 19 (2021).
Bentine, E., Foot, C. J. & Trypogeorgos, D. (py)LIon: a package for simulating trapped ion trajectories. Comput. Phys. Commun. 253, 107187 (2020).
Wesenberg, J. H. Electrostatics of surface-electrode ion traps. Phys. Rev. A 78, 063410 (2008).
Ghadimi, M. et al. Dynamic compensation of stray electric fields in an ion trap using machine learning and adaptive algorithm. Sci. Rep. 12, 7067 (2022).
Acknowledgements
This work was supported by the National Natural Science Foundation of China (Grant No. 22241301, 22173040, 22103032, 22173042, and 21973037), the Shenzhen Science and Technology Innovation Committee (Grant No. JCYJ20210324103810029, 20220815145746004, and 2021344670), the Guangdong Innovative & Entrepreneurial Research Team Program (Grant No. 2019ZT08L455, and 2019JC01X091), and Innovation Program for Quantum Science and Technology (Grant No. 2021ZD0303304).
Author information
Authors and Affiliations
Contributions
Y.X. and Y.X.P. performed the experiments and analyzed the data. L.F.C. did the simulation. C.H.L. and Z.A.S. collected the experimental data. T.W., X.W., and Y.R.X. discussed the results and analyzed the data. B.Z. did the simulation and prepared the manuscript. T.G.Y. designed the experiments and prepared the manuscript.
Corresponding authors
Ethics declarations
Competing interests
The authors declare no competing interests.
Peer review
Peer review information
Communications Physics thanks Scarlett Yu and the other, anonymous, reviewer(s) for their contribution to the peer review of this work.
Additional information
Publisher’s note Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
Open Access This article is licensed under a Creative Commons Attribution-NonCommercial-NoDerivatives 4.0 International License, which permits any non-commercial use, sharing, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons licence, and indicate if you modified the licensed material. You do not have permission under this licence to share adapted material derived from this article or parts of it. The images or other third party material in this article are included in the article’s Creative Commons licence, unless indicated otherwise in a credit line to the material. If material is not included in the article’s Creative Commons licence and your intended use is not permitted by statutory regulation or exceeds the permitted use, you will need to obtain permission directly from the copyright holder. To view a copy of this licence, visit http://creativecommons.org/licenses/by-nc-nd/4.0/.
About this article

Cite this article
Xiao, Y., Peng, Y., Chen, L. et al. Two-dimensional cooling without repump laser beams through ion motional heating. Commun Phys 7, 423 (2024). https://doi.org/10.1038/s42005-024-01920-2
Received:
Accepted:
Published:
Version of record:
DOI: https://doi.org/10.1038/s42005-024-01920-2

{kind=link}