
Abstract
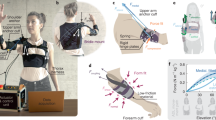
Spinal cord injury (SCI) disrupts neuromuscular control, severely affecting independence and quality of life. Although upper limb wearable robots hold considerable promise for functional restoration, most existing prototypes have been validated minimally in people with SCI and target almost exclusively hand opening and closing. We introduce a lightweight, modular assistive soft exosuit that simultaneously and automatically supports shoulder abduction and elbow flexion or extension movements using lightweight fabric-based pneumatic actuators, controlled through inertial sensors. The individual elbow modules were first validated in 11 healthy volunteers, and subsequently tested, together with the shoulder module, in 15 individuals with cervical SCI (C4–C7, AIS A–D). In the SCI participants, exosuits assistance resulted in increased static endurance time (by more than 250%), and lower activity of the primary muscles involved in dynamic tasks (by up to 50%). The two SCI participants retaining prehensile capability also improved their scores in the box and block test when assisted. Moreover, the soft actuation provided a safe, comfortable and easy-to-use solution that was positively appreciated by the participants. Collectively, these results provide encouraging evidence that exosuits can augment upper limb motor performance, and may ultimately translate into greater functional independence and quality of life for the SCI population.
This is a preview of subscription content, access via your institution
Access options
Access Nature and 54 other Nature Portfolio journals
Get Nature+, our best-value online-access subscription
$32.99 / 30 days
cancel any time
Subscribe to this journal
Receive 12 digital issues and online access to articles
$119.00 per year
only $9.92 per issue
Buy this article
- Purchase on SpringerLink
- Instant access to full article PDF
Prices may be subject to local taxes which are calculated during checkout






Similar content being viewed by others

Data availability
Source data are provided with this paper.
References
World Health Organization. Spinal cord injury (2024); https://www.who.int/news-room/fact-sheets/detail/spinal-cord-injury
Nas, K., Yazmalar, L., Şah, V., Aydın, A. & Öneş, K. Rehabilitation of spinal cord injuries. World J. Orthop. 6, 8–16 (2015).
Ho, J. S., Ko, K. S., Law, S. W. & Man, G. C. The effectiveness of robotic-assisted upper limb rehabilitation to improve upper limb function in patients with cervical spinal cord injuries: a systematic literature review. Front. Neurol. 14, 1126755 (2023).
Charlifue, S. & Gerhart, K. Community integration in spinal cord injury of long duration. NeuroRehabilitation 19, 91–101 (2004).
Savic, G., Frankel, H. L., Jamous, M. A., Soni, B. M. & Charlifue, S. Participation restriction and assistance needs in people with spinal cord injuries of more than 40 year duration. Spinal Cord Ser. Cases 4, 28 (2018).
Morone, G., Pirrera, A., Iannone, A. & Giansanti, D. Development and use of assistive technologies in spinal cord injury: a narrative review of reviews on the evolution, opportunities, and bottlenecks of their integration in the health domain. Healthcare 11, 1646 (2023).
Fawcett, J. W. et al. Guidelines for the conduct of clinical trials for spinal cord injury as developed by the ICCP panel: spontaneous recovery after spinal cord injury and statistical power needed for therapeutic clinical trials. Spinal Cord 45, 190–205 (2007).
Mekki, M., Delgado, A. D., Fry, A., Putrino, D. & Huang, V. Robotic rehabilitation and spinal cord injury: a narrative review. Neurotherapeutics 15, 604–617 (2018).
Pehlivan, A. U. et al. Design and validation of the RiceWrist-S exoskeleton for robotic rehabilitation after incomplete spinal cord injury. Robotica 32, 1415–1431 (2014).
Sledziewski, L., Schaaf, R. C. & Mount, J. Use of robotics in spinal cord injury: a case report. Am. J. Occup. Ther. 66, 51–58 (2012).
Vanmulken, D. M. M., Spooren, A. I. F., Bongers, H. M. H. & Seelen, H. M. Robot-assisted task-oriented upper extremity skill training in cervical spinal cord injury: a feasibility study. Spinal Cord 53, 547–551 (2015).
Catalán, J. M. et al. Hybrid brain/neural interface and autonomous vision-guided whole-arm exoskeleton control to perform activities of daily living (ADLs). J. Neuroeng. Rehabil. 20, 61 (2023).
Chang, E. Y., McPherson, A. I. W., Adolf, R. C., Gloumakov, Y. & Stuart, H. S. Modulating wrist-hand kinematics in motorized-assisted grasping with C5-6 spinal cord injury. IEEE Trans. Med. Robot. Bionics 6, 189–201 (2024).
Francisco, G. E. et al. Robot-assisted training of arm and hand movement shows functional improvements for incomplete cervical spinal cord injury. Am. J. Phys. Med. Rehabil. 96, S171 (2017).
Zariffa, J. et al. Feasibility and efficacy of upper limb robotic rehabilitation in a subacute cervical spinal cord injury population. Spinal Cord 50, 220–226 (2012).
Soekadar, S. R. et al. Hybrid EEG/EOG-based brain/neural hand exoskeleton restores fully independent daily living activities after quadriplegia. Sci. Robot. 1, eaag3296 (2016).
Cortes, M. et al. Improved motor performance in chronic spinal cord injury following upper-limb robotic training. NeuroRehabilitation 33, 57–65 (2013).
Kim, J. et al. Clinical efficacy of upper limb robotic therapy in people with tetraplegia: a pilot randomized controlled trial. Spinal Cord 57, 49–57 (2019).
Sørensen, L. & Månum, G. A single-subject study of robotic upper limb training in the subacute phase for four persons with cervical spinal cord injury. Spinal Cord Ser. Cases 5, 29 (2019).
Proietti, T., Ambrosini, E., Pedrocchi, A. & Micera, S. Wearable robotics for impaired upper-limb assistance and rehabilitation: state of the art and future perspectives. IEEE Access 10, 106117–106134 (2022).
Gandolla, M., Antonietti, A., Longatelli, V. & Pedrocchi, A. The effectiveness of wearable upper limb assistive devices in degenerative neuromuscular diseases: a systematic review and meta-analysis. Front. Bioeng. Biotechnol. 7, 450 (2020).
Xiloyannis, M. et al. Soft robotic suits: state of the art, core technologies, and open challenges. IEEE Trans. Robot. 38, 1343–1362 (2021).
Cardoso, L. R. L., Bochkezanian, V., Forner-Cordero, A., Melendez-Calderon, A. & Bo, A. P. L. Soft robotics and functional electrical stimulation advances for restoring hand function in people with SCI: a narrative review, clinical guidelines and future directions. J. Neuroeng. Rehabil. 19, 66 (2022).
Cappello, L. et al. Assisting hand function after spinal cord injury with a fabric-based soft robotic glove. J. Neuroeng. Rehabil. 15, 59 (2018).
Correia, C. et al. Improving grasp function after spinal cord injury with a soft robotic glove. IEEE Trans. Neural Syst. Rehabil. Eng. 28, 1407–1415 (2020).
Yoo, H.-J., Lee, S., Kim, J., Park, C. & Lee, B. Development of 3D-printed myoelectric hand orthosis for patients with spinal cord injury. J. Neuroeng. Rehabil. 16, 162 (2019).
Dittli, J. et al. Mixed methods usability evaluation of an assistive wearable robotic hand orthosis for people with spinal cord injury. J. Neuroeng. Rehabil. 20, 162 (2023).
Osuagwu, B. A. C. et al. Home-based rehabilitation using a soft robotic hand glove device leads to improvement in hand function in people with chronic spinal cord injury: a pilot study. J. Neuroeng. Rehabil. 17, 40 (2020).
Lotti, N. et al. Soft robotics to enhance upper limb endurance in individuals with multiple sclerosis. Soft Robot. 11, 338–346 (2024).
Proietti, T. et al. Restoring arm function with a soft robotic wearable for individuals with amyotrophic lateral sclerosis. Sci. Transl. Med. 15, eadd1504 (2023).
Georgarakis, A.-M., Xiloyannis, M., Wolf, P. & Riener, R. A textile exomuscle that assists the shoulder during functional movements for everyday life. Nat. Mach. Intell. 4, 574–582 (2022).
Nam, C. Y. et al. An exoneuromusculoskeleton for self-help upper limb rehabilitation after stroke. Soft Robot. 9, 14–35 (2020).
Proietti, T. et al. Combining soft robotics and telerehabilitation for improving motor function after stroke. Wearable Technol. 5, e1 (2024).
Park, S. J. et al. Soft exosuit based on fabric muscle for upper limb assistance. IEEE/ASME Trans. Mechatron. 28, 26–37 (2022).
Shi, Y. et al. Human-in-the-loop modeling and control of an upper limb exosuit with tendon-sheath actuation. IEEE Robot. Autom. Lett. 9, 5919–5926 (2024).
Noronha, B. et al. Soft, lightweight wearable robots to support the upper limb in activities of daily living: a feasibility study on chronic stroke patients. IEEE Trans. Neural Syst. Rehabil. Eng. 30, 1401–1411 (2022).
Simpson, C. et al. Upper extremity exomuscle for shoulder abduction support. IEEE Trans. Med. Robot. Bionics 2, 474–484 (2020).
Campioni, L. et al. Preliminary evaluation of a soft wearable robot for shoulder movement assistance. IEEE Trans. Med. Robot. Bionics 7, 315–324 (2025).
Oliveira, D. S. et al. A direct spinal cord-computer interface enables the control of the paralysed hand in spinal cord injury. Brain 147, 3583–3595 (2024).
Lo, C., Tran, Y., Anderson, K., Craig, A. & Middleton, J. Functional priorities in persons with spinal cord injury: using discrete choice experiments to determine preferences. J. Neurotrauma 33, 1958–1968 (2016).
Proietti, T. et al. Sensing and control of a multi-joint soft wearable robot for upper-limb assistance and rehabilitation. IEEE Robot. Autom. Lett. 6, 2381–2388 (2021).
Gerez, L., Micera, S., Nuckols, R. & Proietti, T. Assessment of wearable robotics performance in patients with neurological conditions. Curr. Opin. Neurol. 37, 645–654 (2024).
Zhou, Y. M. et al. A portable inflatable soft wearable robot to assist the shoulder during industrial work. Sci. Robot. 9, eadi2377 (2024).
Atkins, M. S. et al. Mobile arm supports: evidence-based benefits and criteria for use. J. Spinal Cord Med. 31, 388–393 (2008).
Kloosterman, M. G. M., Snoek, G. J., Kouwenhoven, M., Nene, A. V. & Jannink, M. J. A. Influence of gravity compensation on kinematics and muscle activation patterns during reach and retrieval in subjects with cervical spinal cord injury: an explorative study. J. Rehabil. Res. Dev. 47, 617 (2010).
Prange, G. B. et al. Increased range of motion and decreased muscle activity during maximal reach with gravity compensation in stroke patients. In Proc. 2007 IEEE 10th International Conference on Rehabilitation Robotics 467–471 (IEEE, 2007).
Krabben, T. et al. Influence of gravity compensation training on synergistic movement patterns of the upper extremity after stroke, a pilot study. J. Neuroeng. Rehabil. 9, 44 (2012).
Feng, M., Yang, D., Ren, L., Wei, G. & Gu, G. X-crossing pneumatic artificial muscles. Sci. Adv. 9, eadi7133 (2023).
Recommendations for sensor locations on individual muscles; http://seniam.org/sensor_location.htm
Bangor, A., Kortum, P. T. & Miller, J. T. An empirical evaluation of the system usability scale. Int. J. Hum. Comput. Interact. 24, 574–574 (2008).
Acknowledgements
This work was supported by the Bertarelli Foundation (S.M.), by #NEXTGENERATIONEU (NGEU) and by the Italian Ministry of University and Research (MUR), National Recovery and Resilience Plan (NRRP) with two projects: project THE (IECS00000017)—Tuscany Health Ecosystem (DN. 1553 11.10.2022, awarded to S.M.); and project MNESYS (PE0000006)—a multiscale integrated approach to the study of the nervous system in health and disease (DN. 1553 11.10.2022, awarded to S.M.). We thank all the participants for volunteering their time and contributions to this study.
Author information
Authors and Affiliations
Contributions
T.P., R.F. and G.D.A. built the robot (textile, mechatronics and software). All authors designed the study protocol. R.F., G.D.A., G.S., G.R. and C.D.S. ran the protocol. T.P., R.F. and G.D.A. processed the data and ran the statistical analysis. T.P., R.F. and S.M. wrote the original manuscript. All authors reviewed the manuscript and provided critical feedback.
Corresponding author
Ethics declarations
Competing interests
The authors declare no competing interests.
Peer review
Peer review information
Nature Machine Intelligence thanks Wanru Duan and the other, anonymous, reviewer(s) for their contribution to the peer review of this work.
Additional information
Publisher’s note Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Extended data
Extended Data Fig. 1 Design of the extensor and flexor actuators.
Both actuators are fabricated from two TPU-coated Nylon sheets (grey); an internal air chamber is created by inserting heat-resistant paper (light blue) between the layers prior to heat-sealing. A polyurethane tube is then heat-sealed to the chamber opening. For the extensor actuator (a) longitudinal incisions permit attachment to the forearm with Velcro straps. For the flexor actuator (b) Velcro straps are routed through the incisions to anchor the actuator’s ends across proximally and distally relative to the elbow joint. For more details about the manufacturing process of this module, refer to48.
Extended Data Fig. 2 Mechanical characterization of the extensor actuator.
a) Torque-pressure characterization. As expected, the torque behavior is linearly dependent on the pressure, achieving an average maximum of 22.1 ± 0.8 Nm (standard error) when at 135º and 69 kPa. b) Torque-angle characterization. The behavior is non-linear, with the clear peak of torque occurring approximately at 135º. All curves are average values and standard errors out of three measurements from three different actuators (thus 9 values) mounted on a custom 3D printed mannequin, measured with a universal material tester (Instron 5965, Instron Corporation, USA) mounting a 1kN load cell. c) Pictures of the test setup at different mannequin, thus actuator, angles.
Extended Data Fig. 3 Mechanical characterization of the flexor actuator.
a) Force-pressure characterization. As expected, the force behavior is linearly dependent on the pressure, achieving an average maximum of 40.4 ± 3.5 N (standard error) when fully closed (0% of contraction ratio) and 69 kPa. b) Force-contraction ratio characterization. The behavior is non-linear with a peak of force occurring approximately at 0% of contraction ratio and then a second local peak at approximately 60%. All curves are average values and standard errors out of three static measurements from three different actuators (thus 9 values) with a universal material tester (Instron 5965, Instron Corporation, USA) mounting a 1kN load cell. c) Pictures of the test setup (from left to right, 0, 40, 60, 100% CR).
Extended Data Fig. 4 SCI Subgroup Analysis – Dual Effect.
Participants with greater impairment (lower baseline ROM, thus low x values) exhibited higher active ROM improvements (higher y values), whereas less impaired individuals (higher baseline ROM, higher x values) largely maintained their range of motion, benefiting instead from reduced muscular effort. This dual effect underscores the assistive potential of the system across a spectrum of impairments. Positive y-values indicate increased ROM when assisted (that is, ROM with the robot ON greater than with the robot OFF). Blue circles indicate reduction in muscle activity as % of baseline EMG. a) Analysis of elbow flexion movements during ROM task. b) Analysis of the elbow extension movements during ROM task. Each circle represents data from one SCI participant. An exponential model captured the observed trends, with R² = 0.85 for flexion and R² = 0.62 for extension.
Supplementary information
Supplementary Video 1
Healthy participants.
Supplementary Video 2
SCI participants.
Supplementary Video 3
Exosuit overview.
Supplementary Video 4
Full-system integration proof of concept.
Source data
Source data for Figs. 1–6
Processed data used for plots in Figs. 1–6 (bar plots and time series), organized in separate sheets.
Rights and permissions
Springer Nature or its licensor (e.g. a society or other partner) holds exclusive rights to this article under a publishing agreement with the author(s) or other rightsholder(s); author self-archiving of the accepted manuscript version of this article is solely governed by the terms of such publishing agreement and applicable law.
About this article

Cite this article
Ferroni, R., D’Avola, G., Sciarrone, G. et al. A multi-joint soft exosuit improves shoulder and elbow motor functions in individuals with spinal cord injury. Nat Mach Intell 7, 1390–1402 (2025). https://doi.org/10.1038/s42256-025-01105-8
Received:
Accepted:
Published:
Issue date:
DOI: https://doi.org/10.1038/s42256-025-01105-8
