
Abstract
The first-order configuration of the Himalayan orogen is defined by northward motion of the Indian plate, whether directly underplating Tibetan crust or subducting beneath a mantle wedge. Here we used 3D S-wave receiver-functions from 462 seismic stations across southern Tibet and show orogen-perpendicular tearing of the Indian plate. West of 90°E, the southern limit of the Tibetan lithosphere-asthenosphere boundary is at the Indian crustal front, ~100-km north of the Yarlung-Zangbo suture, implying underplating of intact Indian lithosphere beneath Tibet. Further east, Indian lithospheric mantle delaminates from Indian crust, likely by gravitationally-induced rollback, separated from Indian crust by a wedge of asthenosphere between Indian crust and Indian mantle lithosphere. Nascent Tibetan lithosphere and its subjacent thin asthenosphere continue to ~100 km south of the Yarlung-Zangbo suture. This contrast in lithospheric structures at 90–92°E (across the Yadong-Gulu and Cona-Sangri rifts), in agreement with helium isotopes and intermediate-depth earthquakes, suggests the subducting Indian plate is torn along the convergence direction.

Similar content being viewed by others
Introduction
Continental collision on Earth is today best expressed in the Himalaya and the Tibet Plateau, which are a consequence of the collision of India and Asia since ~60 Ma1. To understand the geodynamic processes of continental collision, we must characterize the lithospheric architecture2. Arguments from crustal and mantle density suggest that the Indian continental lithosphere should greatly resist subduction unless the overlying crust is separated from the mantle lithosphere3. Accurate locations of the crustal front (northern limit of Indian crust beneath Tibet) and the mantle suture (southern limit of Tibetan mantle at the Moho)4 with respect to the surface Yarlung-Zangbo suture (YZS) (Fig. 1), are needed to define the 3D geometry of the India–Asian collision zone, and determine whether Indian crust subducts with Indian mantle lithosphere or detaches from Indian mantle lithosphere to be incorporated into the Tibetan crust. End-member hypotheses – sub-horizontal underplating of India beneath Tibet5,6 vs. steep subduction of India beneath southernmost Tibet7,8 – have largely been driven by contradictory seismic-tomography interpretations that gloss over west-to-east variability in lithospheric structure9,10,11. The diverse tomographic models of our study region of southeast Tibet include upper-mantle high-wavespeed regions interpreted as underthrust Indian cratonic lithosphere11, and localized lower-wavespeed regions interpreted as sub-Moho partial melt11 or asthenospheric upwelling12 or lithospheric removal by Rayleigh–Taylor instability9 or fragmentation of the Indian plate along north-south breaks10. However, tomographic models are invariably spatially smoothed. Although synthetic tests demonstrate good recovery of structures with a diameter of 150–200 km these models cannot recover sharp changes or small-scale reversals in the velocity-depth profile9,10,11,12. Hence, the detailed upper-mantle geometry of continental collision is widely studied, as in this paper, using receiver functions.

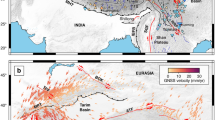
Red diamonds: seismometers for which SRFs have not previously been published; purple: previously published, but SRFs were recalculated for this study (see Supplementary Data Repository). Yellow dashed lines: Yarlung-Zangbo (YZS), Banggong-Nujiang (BNS), and Jinsha River (JRS) sutures. MFT: Main Frontal Thrust. Blue dashed lines: normal faults in the Tangra-Yumco (TYG), Pumqu-Xainza (PXG), Yadong-Gulu (YGG), and Cona-Sangri (CSG) grabens; white-dash line: Kopili fault zone (KPF)2. The inset map shows the Indian crustal front, helium boundary (mantle suture), and below-Moho earthquakes (stars)32; Kunlun fault (KF); Altyn Tagh fault (ATF).
P-wave seismic receiver functions (PRFs, P-to-S conversions at lithospheric wavespeed boundaries) image Indian underthrust crust as a ‘seismic doublet’13,14,15 up to, or as a crustal-thickness change16 at, its northern limit at the crustal front, approximately 200-km north of the YZS (Fig. 1). PRFs show the Moho at 60–80 km depth north of the YZS13,14,15,17 but deeper boundaries such as the lithosphere-asthenosphere boundary (LAB) are largely obscured by multiply-converted phases on PRFs so that S-receiver functions (SRFs) are more-commonly used to locate the LAB18. The LAB in the east-central India-Tibet collision zone has been extensively studied with SRF imaging15,19,20,21,22,23,24,25. However, the weak response of the LAB, as compared to the Moho, has led to subjective and conflicting interpretations of negative velocity gradients (NVGs) that typically fall into two depth ranges, shallow at <~125 km15,25 (Fig. S1a), and deep at >~170 km19,20 (Fig. S1b, c). Different authors claim to image the Indian LAB (I-LAB), the Tibetan-LAB (T-LAB), the Asian LAB (A-LAB), or even all three (Fig. S1). Some studies identified a north- or NNE-dipping NVG converter spanning the two depth ranges20,21,23,26 (Fig. S1b, d), interpreted as north-dipping I-LAB and consistent with shallower north-dipping positive converters interpreted as top of subducting Indian lithosphere (Fig. S1e). Contradictory results are due to the use of different data, different processing [e.g., lower19 or higher22 frequency bands], and different picking schemes [sometimes every negative oscillation22, sometimes a smoothed line through the larger amplitudes19] leading to picks that can differ by >50 km vertically in the same location (e.g., west-center of Fig. S1).
Even where there is agreement on depths to specific negative wavespeed gradients, interpretations often differ. Shallow NVGs are typically identified as T-LAB north of the YZS but as I-LAB further south22,25 (Fig. S1a). Deeper NVGs are interpreted as A-LAB when further north, or I-LAB when further south19 (Fig. S1b). The dependence of interpretations on pre-conceived geometric models is highlighted by different interpretations of the same converter [e.g., I-LAB19,20 of Fig. S1b is in part A-LAB22 of Fig. S1c], and by the same interpretation of different converters [e.g., I-LAB25 in Fig. S1a is >100 km shallower than I-LAB19 in Fig. S1b].
Here we present SRFs from 462 broadband seismic stations (Fig. 1) across southern Tibet. We use auto-picking to objectively map the LAB (Fig. 2) and define the limited region of southern Tibet directly underlain by Indian lithospheric mantle (Fig. 3). Our geometric model is consistent with mid-Tertiary Indian slab break-off 27,28,29, the northern limit of intermediate-depth earthquakes below the Moho30,31, the southern limit of 3He-enriched thermal waters32, and patterns of NNE-trending grabens, normal-faulting and upper-crustal-earthquake mechanisms33 (Fig. 4).

a Map using 1°-radius bins. Color scale: depth to NVG; opacity is proportional to number of SRFs per bin (fully transparent if <3 SRFs in a bin; numbers of SRFs shown in Fig. S2m, n). Yellow stars and gray lines mark locations of SRF boundary (transition from deep (blue) to shallow (red), strongest NVG) as picked from record sections. b–e Record sections calculated using 1°-radius bins, along 32°, 31°, 30° and 29°N as shown in a. f Map using 0.5°-radius bins. g–j Record sections using 0.5°-radius bins along oblique profiles AA’, BB’, CC’, and DD’ as in f. Blue circles are auto-picked maximum negative arrivals between 80 and 220 km, mapped in a and f. Cyan and pink overlays are interpretations of NVGs I-LAB and T-LAB, constrained to agree where profiles intersect. All record sections are vertically exaggerated ×2 and have the same horizontal scale as the maps.

a–c SRFs record sections along profiles XX’, YY’, and 31°N. Vertical dash lines mark profile intersections; XX’ and YY’ are vertically aligned along 31°N. d–f Tectonic interpretation along XX’, YY’, and 31°N based on a combination of our SRFs, helium data32, and tomography29 g–i Tomographic sections along XX’, YY’, and 31°N (contours are absolute Vs/km.s−1)29. j Schematic map locating profiles XX’, YY’, and 31°N.

a Summary map of SRF results. Southwestern region (pale cyan) has no Tibetan mantle lithosphere (no T-LAB); the thick cyan boundary is shown 100-km wide to capture uncertainty in the location of the SRF mantle suture. Smoothly curved thin white line with thick gray margins is the northern extent of the Indian lower crust at the Moho (crustal front), continuous line from PRF doublet13,14,15, dashed line from H-k Moho mapping16. White stars are earthquakes with hypocenters at 65–100 km depth32. b FWEA23 S-wave tomography dVs (%) at 150 km29. Blue: higher wavespeed than average at 150-km depth, inferred cratonic mantle lithosphere; red: slow wavespeeds, inferred asthenosphere. Dog-legged thick white line with thick gray margins is a helium-boundary line interpreted as a mantle suture32, dashed where poorly constrained. c 3D perspective view of SE Tibet viewed from the northeast, showing cartoon cross-sections at true-scale (no vertical exaggeration) along XX’, YY’ (both parallel to India-Asia convergence direction) and along 31°N (Fig. 3). Wiggly lines are schematic of 3He leaking from hot Neogene mantle lithosphere or subjacent asthenosphere everywhere north of the mantle suture, which is consistent with the >50 km thick low-velocity layer beneath the Tibetan crust48. A transparent shaded-relief map shows sutures, active rifts, and helium boundary, as in (a) and (b).
Results: S-wave receiver function (SRF) analyses and description
We utilize 4051 SRFs from 462 temporary broadband seismic stations, including 333 from which SRFs have not previously been published (Fig. 1). Many of these stations are from west-east arrays17 that fill data gaps between older arrays typically deployed along the NNE-trending rift grabens in this region13,15,34,35. Our combined dataset has an order-of-magnitude more data, and correspondingly higher areal resolution, than previous SRF studies in this area. We computed SRFs for all data available to us, even those previously published, to ensure consistent processing (see “Materials and methods” section). We summed the SRFs in uniform 1.0° or 0.5°-radius overlapping circular bins, then auto-picked the maximum negative S-to-P conversion (the largest NVG) between 80 and 220 km, to provide an objective map of the LAB (Figs. 2, S2). Our mapping shows the highest-amplitude negative converter (blue circles in Figs. 2b–e, g–j, S3, S4) is to first order below ~160 km (blue in Figs. 2a, f, S2a–j) in the southwest and above ~130 km (orange and red in Figs. 2a, b, S2a–j) in the northeast of our study area. The lateral transition (hereafter SRF boundary) between the regions of deeper and shallower largest NVGs can be picked sometimes within ±25 km (one-trace spacing) on west-east cross-sections (e.g., 31°N, Fig. 2c), elsewhere no better than ±100 km (e.g., 29°N, Fig. 2e) (approximately the degree of data overlap between adjacent bins). The existence, location, and interpretation of this SRF boundary, picked and shown as yellow stars on Fig. 2, are the subject of this paper.
Detailed comparison shows that we observe negative-polarity converters at the same depths/locations as seen in older data24 (Fig. S5), even when two studies share no seismic data in common. We conclude that, despite different interpretations, SRF images themselves are reliable. Our auto-picked maps (Figs. 2, S2) are noisier than subjectively smoothed maps published elsewhere (Fig. S1), but our first-order, long-wavelength pattern (shallow NVG in southwest, deep NVG in northeast) is seen at different effective resolutions and when bin-centers are offset (Figs. 2a, b, S2). Although there is significant complexity in the SRFs, we have preferred to under-interpret the data and seek a consistent and objective identification of the LAB across a large dataset. For geologic interpretation, we smooth the auto-picks along two profiles X–X’, Y–Y’ parallel to the India-Asia convergence direction (Fig. 3). Our smoothing ignores outlier auto-picks of NVG depths that conflict with results in multiple adjacent bins and excludes bins with few SRFs (not mapped in Figs. 2, S2, S10, S11 if <3 SRFs in a bin). Profiles crossing the SRF boundary show a step-up from a deep southwest converter to a shallow northeast converter (Fig. 2g, h: A–A′, B–B′; Fig. 3); whereas sections ~parallel to the boundary show the strongest NVG is everywhere shallow north of the boundary (Fig. 2i: C–C′), or everywhere deep south of the boundary (Fig. 2j: D–D′). The NVGs beneath the Indian plate exhibit greater depths (Fig. S6) and lower amplitudes (Fig. S11), consistent with cratonic mantle lithosphere, than those we interpret as Tibetan-LAB.
Discussion
SRF interpretation
A positive (red) SRF converter at ~70 km depth (Figs. 2, S3, S4) is the Moho as identified in PRF studies13,14,15,17,36. The converter varies between a single high-amplitude peak (e.g., Fig. 2d, e east of 92°E) to a pair of weaker converters (e.g., Fig. 2d, e west of 92°E). This pair corresponds to the PRF doublet interpreted as underthrust eclogitized Indian crust at the base of the Tibetan crust13,14,15,17,36 that can reach >25 km, but when <10 km thick, merges into a single positive pulse on PRFs17. The transition from SRF doublet to single Moho converter (Fig. 2c–f) could mark either the termination or significant thinning of the underthrust Indian lower crust, or a transition from high-velocity eclogitized Indian lower crust (doublet) to a normal mafic (but not eclogite) lower crust lacking a converter at its top.
Our SRF data also allow systematic mapping of the strongest NVG on each trace (Fig. 2), which has depth modes at ~100–130 km and (much weaker) at ~170–210 km, respectively (Fig. S6). We follow previous identifications of the deeper and shallower boundaries as I-LAB and T-LAB15,22,24,26,36 (Fig. S1), because the Indian lithosphere is Precambrian, cratonic, and ~160–200 km thick6,27 whereas any Tibetan lithosphere is Neogene, younger than the most recent delamination episode beneath Tibet, so much thinner. The greater continuity and clarity of the shallow T-LAB compared to the deeper I-LAB is consistent with global studies comparing Phanerozoic belts (e.g., Tibet) with cratons (e.g., India)18,37. Our images map out the southwestern limit of T-LAB as the strongest converter, running WNW–ESE for >500 km from ~31°N, 88°E to ~30°N, 92°E, then north-south along 92°E from ~30–28°N (Figs. 2, 3, 4a). Interpretations of multiple vertically stacked LABs are precluded by our auto-picking methodology that selects only one NVG per trace (see “Materials and methods” section). Because the Indian plate dips north beneath Tibet, we expect I-LAB to extend northeast beyond and below the T-LAB with a degree of horizontal overlap, but in many places to be invisible because of the overlying stronger T-LAB converter. Conversely, a wedge of Tibetan lithosphere that is <~10 km thick, so below the resolution limit of our seismograms38 may extend south of the region in which T-LAB is the strongest NVG.
Other interpretations are certainly possible, e.g., that our observed rapid lateral variations in vertical structure relate to interlayered structural complexities, partial-melt zones, or compositional or rheological changes of unknown provenance. In contrast, we believe the first-order signal in our data is the distinction between a deeper and a shallower maximum-amplitude NVG across a single boundary, and that a single unifying interpretation is possible that clarifies and refines the many previous claims of diverse evidence for a slab tear beneath the eastern Himalaya and southern Tibet8,10,12,17,24,32,39,40.
Interpretations of crustal front, mantle suture, and mantle front
The mantle suture is the boundary between the Indian mantle and the Tibetan or Eurasian mantle at the Moho, and the Indian mantle front is the northernmost extent of the Indian plate4; the crustal front is the northern limit of Indian crust at the Moho. If the northern edge of the Indian plate is vertical, then the surface trace of the mantle suture and the crustal and mantle fronts are coincident, and T-LAB and I-LAB do not overlap. However, if the Indian slab dips north beneath Tibetan mantle lithosphere or an asthenospheric wedge, the mantle suture must be south of the northern limit of I-LAB, and the crustal front could be anywhere at or north of the mantle suture, depending on whether the Indian plate is intact or part or all of the crust is removed during underthrust/subduction3. From our SRF data, the mantle suture could be at, or is likely some distance south and east of, the southern and eastern limit of where T-LAB forms the largest negative conversion, an uncertainty we represent by showing the SRF mantle suture 100 km wide in Fig. 4.
Seismologists largely agree on the position of the crustal front, defined by PRFs at ~31°N from ~83–93°E13,14,15, then possibly turning towards the southeast15 (Fig. 1 inset); an alternate proxy for the crustal front using H-k analyses of crustal thickness16 shows a very similar southeasterly trend somewhat closer to the EHS (Fig. 4a). West of 90°E the mantle suture appears to be approximately coincident with the crustal front, whether inferred from gravity modeling4, shear-wave splitting41,42, the northern limit of near-Moho earthquakes30 (Fig. 4a) or the southern limit of geothermal mantle-helium emissions32,43 (Fig. 4b), all in good agreement with our SRF data. East of 90°E, where the crustal front remains north of 30°N east to ≥94°E13,14,15,16, SRF images15,36 and helium-isotope data32 have already been used to argue the mantle suture steps >100 km south of the YZS into the Himalaya, now supported by our SRF boundary (Fig. 4a), and by the eastern limit of near-Moho earthquakes31.
Additional supporting evidence for our interpretation of a north-south boundary at ~91–92°E between I-LAB and T-LAB comes from west-east PRF profiles (~29 and 30°N) showing the lower-crust/Moho doublet disappears (or thins below the resolution limit) east of 91–92°E17. The same behavior is seen on our latitudinal SRF profiles (lower frequency than the PRF signals) that show the Moho/doublet converter transitioning from a doublet to a single higher-amplitude pulse at ~91–92°E (Fig. 2c–e). Where the Tibetan mantle underlies Indian crust (where the mantle suture is south of the crustal front), Indian lithospheric mantle must be detaching from the Indian lower crust. Detachment at the Moho is plausible because the Moho is the weakest intra-lithospheric zone in simple jelly-sandwich strength models, immediately below the deepest/hottest quartz-/feldspar-dominated rocks44. Olivine-dominated mantle at the same depth and temperature is significantly stronger44. The PRF Moho/doublet converters likely bound eclogitized lower crust14,17. Where the crustal front is north of the mantle suture, new Tibetan lithospheric mantle must be heating the underthrust crust. This heated lower crust is too hot for eclogite preservation, explaining the lack of a doublet converter (Fig. 4c), and too hot for intermediate-depth earthquakes that are indeed absent here (Fig. 4a). Thus we suspect that Moho variability does not represent inherited variation in structure at the base of the Gangdese arc in the Lhasa block, but instead corresponds to the presence or absence of subjacent Indian lithosphere. Our SRF boundary encompasses all known earthquakes with hypocentral depths 65–100 km (Fig. 4a), that are speculated to mark “India’s penetration beneath Tibet or the limit of the Indian Shield as a strong entity”30, and eclogite drips or Rayleigh–Taylor instabilities31. This cannot simply represent an abrupt west-east change in the northern limit of the Indian indentor approaching the Eastern Syntaxis, because the Indian crustal front lies further north and is only smoothly varying (Fig. 1).
Correlations with surface geology and geochemistry are also evident. Our SRF boundary correlates with the northern limit of major normal faulting in Tangra-Yumco graben (TYG), Pumqu-Xainza graben (PXG), and Yadong-Gulu graben (YGG), and our eastern margin of Indian lithosphere lies beneath Cona-Sangri graben (CSG), the easternmost of the NNE-trending grabens in southern Tibet40 (Figs. 1, 4a), updating previous estimates of the limits of Indian lithosphere based only on tomography8. This spatial correlation agrees with a proposed mechanical link between east-west extension and lithospheric underthrusting and tearing below southern Tibet8,33,39, thereby adding weight to our identification of our SRF negative converters as observations of distinct I-LAB and T-LAB. Though the correlations are not perfect, discrepancies are within one lithospheric thickness (~100 km), likely representing the potential overlap of the T-LAB/I-LAB boundary as well as imprecision in defining the northern limit of rifts or southern limit of asthenosphere-sourced geothermal 3He. The key aspect of all the datasets is the contrast between the region where Indian crust/mantle together underthrust the Lhasa terrane north of the YZS (X–X’, Figs. 3, 4) west of the YGG, and the region where Indian mantle lithosphere delaminates from Indian crust south of the YZS (Y–Y’, Figs. 3, 4) east of the CSG.
Evolution of Tibetan lithosphere north of the mantle suture
Our geometric model (Figs. 3, 4c) is a geologically instantaneous snapshot of lithospheric structure with the mantle suture obliquely crossing the YZS from northwest to southeast. Whether subduction (and the mantle suture) has advanced or retreated with respect to the surface is commonly inferred from the migration of magmatism. The interpreted migration of magmatism in eastern Tibet was southward from ~26–18 Ma, implying slab rollback relative to the upper plate, then northward from ~18–8 Ma (following an episode of slab break-off), implying slab advance of <~100 km1. (There are no exposed igneous rocks <8 Ma, so no evidence on migration since 8 Ma.) Slab break-off at 18 Ma suggests Tibetan mantle lithosphere immediately north of the modern mantle suture at 86–92°E has a thermal age of 18 Ma (or less if underplating Indian lithosphere subsequently extended north of the modern mantle suture). 18-Ma lithosphere is only ~20–50 km thick based on depth to the ~1100 °C isotherm (the lowest temperature at which LAB is observed with SRFs in young ocean basins45), or depth to the base of the thermal boundary layer, both estimated using conventional thermal parameters27. Despite large uncertainties in these thermal models, T-LAB in southern Tibet should be 20–50 km below the Moho, so at ~70–120 km depth below the surface, in agreement with our observations (Figs. 2, 3). Even if the lithospheric mantle has grown to 50 km in thickness by thermal conduction, the 850 °C isotherm – the minimum melt temperature at these depths with 0.5% water46 – is likely reached <5 km below the Moho. Thus, a nascent Tibetan lithosphere is a ready source of the 3He anomalies observed everywhere north of the mantle suture (Figs. 3, 4), whereas the thick underthrust Indian lithosphere is too cold (<600 °C at the Moho)27 and too dry32 to release 3He.
It is often assumed that slab advance has continued to the present1,27 despite there being no magmatic record or petrological evidence <8 Ma as to whether hinge advance or hinge retreat is occurring today. The absence of volcanism <8 Ma is not diagnostic of cold Indian underthrusting that prevents magma formation, as the <~15 Ma west-east extension of southern Tibet40 likely traps small-volume partial melts in the mid-crust, for which there is much evidence in southern Tibet47.
East of 92°E, far less is known about the timing and polarity of subduction-zone migration. The most modern tomography29,48 shows 92°E is a crude boundary in upper-mantle wavespeed, between west-to-east changes from slow to fast north of ~30°N and from fast to slow south of ~30°N, albeit with potentially ~100 km lateral smearing (Figs. 4b, S7). We infer that the north-south boundary at 92°E, which is the western margin of T-LAB and of high 3He/4He ratios in thermal springs, marks a west-east change in subduction geometry and lithospheric architecture. East of this north-south boundary (Fig. 2d–e, fiducial yellow star) at 150–250-km depth, we note high-amplitude positive (red) converters that identify this region east of the mantle suture as a zone of complex mantle structure, speculatively even delaminated eclogitized Indian lower crust17 (Fig. 4c). We interpret slab delamination east of 92°E (Y–Y’, Figs. 3, 4c) based on three lines of evidence:
[1] The crustal front east of 92°E, based on geology1, PRFs14,15,21, and crustal stress state or earthquake focal mechanisms33 is up to 300 km north of the mantle suture, a geometry requiring detachment of Indian mantle lithosphere from Indian crust, i.e., delamination.
[2] Depths to T-LAB east of the north-south boundary of I-LAB at 92°E [along the possible slab tear inferred from 3He/4He anomalies32] are only ~100 km, consistent with recent rollback in this region, and even shallower than the ~120-km depth to T-LAB immediately north of I-LAB from 88–92°E (Figs. 2, 4). Hence Tibetan lithosphere is thinner/younger east of 92°E than north of 31°N.
[3] As elsewhere in Tibet, mantle-sourced 3He in thermal springs (Fig. 4) immediately above the mantle suture requires very young, hence hot lithosphere directly beneath the crust32, a condition created by slab rollback or delamination. Thus, the CSG along 92°E likely marks a tear in the Indian lithosphere and segmentation of the Himalayan orogen beneath at least the Tethyan Himalaya.
Although numerical modeling suggests tears can be induced just by along-strike variation of convergence rate49, previous suggestions of slab-tearing beneath the eastern Himalaya and southern Tibet8,10,12,17,24,32,39,40 commonly presume an association with the NNE-trending Neogene grabens of southern Tibet, most often the largest graben, the YGG8,10,24,50. But magmatic products of the supposed tear beneath YGG and associated geophysical anomalies span >200 km west-east8,50 hence potentially underlying both the YGG and the CSG. Particularly where the crust has been intruded or melted50 mantle extension or upwelling may be laterally displaced from surficial faulting39,51. An analog may be the ‘subduction-transform edge propagators’52 that tear the subducting Adriatic slab and enable its delamination and rollback beneath Italy, and are similarly linked to the surface by broad trans-crustal boundaries that may span one-to-two crustal thicknesses perpendicular to the slab tear or be more focused onto single lineaments53. Numerical predictions54 that oblique slab tearing can generate localized uplift rates (~1 mm/yr), causing surface faulting, and lateral tear-migration velocities (~0.5 m/yr) that localize stresses, support a causal link between lithospheric tearing and graben formation.
Variations in lithospheric architecture, such as slab tears or lateral ramps, modulate stress transfer across the India-Tibet interface, potentially segmenting the seismogenic upper crust and controlling the spatial distribution of major earthquakes. Oblique convergence between India and Tibet would cause a slab tear to migrate laterally along the west-east orogenic front. We speculate that the lithospheric edge or tear imaged today beneath the CSG12,17,32 (Figs. 3, 4) may have been associated with mid-Miocene magmatism centered on the YGG, but today is localized further east beneath the CSG. This shift coincides with the transition from mid-Miocene diffuse extension to focused rifting at ~3 Ma40. The CSG overlies a significant lateral ramp in the Main Himalayan Thrust, along a north-south fault (Cona cross-structure) that can be traced south into the High Himalaya55. This structural discontinuity aligns with the orogen-crossing Kopili fault zone (Fig. 1), a major strike-slip boundary within the Indian basement that has hosted a historic MW~7 earthquake56. Himalayan seismic hazard is controlled by along-strike segmentation of the thrust belt into distinct earthquake rupture zones. A prominent seismic gap from 91°E to 94°E that has a slip deficit ≥11 m and is at risk of an MW ≥ 8.7 earthquake is bounded to the west by the Kopili fault zone56, suggesting a mechanical linkage between deep lithospheric processes and upper-crustal deformation. We speculate that our observed slab tear, the Kopili strike-slip fault in the lower (Indian) plate, and the Cona-Sangri graben in the upper (Tibetan) thrust plate form a vertically coupled system. Such coupling would suggest that segmentation of the seismogenic upper crust – manifested as seismic gaps – has its origins at the deepest orogenic level, in the mantle lithosphere, highlighting a profound role for deep tectonic inheritance in shaping shallow seismic hazards.
Conclusion
We use SRFs to objectively map depths to distinct Indian and Tibetan lithosphere-asthenosphere boundaries across a substantial region of southeastern Tibet (~500 \(\times\)1000 km). Our inferred boundary between the two lithospheres is corroborated by independent interpretations of the mantle suture from mantle degassing patterns and the northern and eastern limit of sub-Moho earthquakes. The southern limit of Tibetan lithosphere and subjacent asthenosphere is at ~31°N west of 90°E but steps south by >300 km to ~28°N east of 92°E, likely representing a slab tear. Displacement of the mantle suture 300 km south of the crustal front and Tibetan mantle-lithosphere thinness of <30 km suggest geologically recent, likely ongoing, slab rollback and delamination of mantle from crust east of 92°E. Slab rollback and fragmentation from the CSG east to the EHS is likely the structural consequence of the geometric difficulty of simultaneously subducting Indian lithosphere northward beneath Tibet and eastward beneath the active Burma volcanic arc7,57.
Materials and methods
Data processing for S-receiver functions
The Sp phase (teleseismic S converted at a receiver-side wavespeed discontinuity or gradient to an upward-traveling P wave) arrives prior to, and its reverberations arrive later than, the S phase58,59. Thus, SRFs are free of contaminating energy that bedevils PRFs, and the LAB is usually better detected by SRFs than by PRFs58,59. We used teleseismic events with magnitudes >5.0 and epicentral distances of 55–170° (Fig. S8) to calculate SRFs for all stations shown in Fig. 115,19,21,26 as well as newer recordings17. Many published Indian and Chinese data20,22,23,24,25 were not available for re-analysis.
We rotated three-component ZNE seismograms into LQT coordinates using theoretical back-azimuth and incident angles60, keeping seismograms with signal-to-noise ratio >1.5 measured as the ratio of Sp to direct-S wave on the Q component. We time-reversed all traces so that Sp phases follow the direct-S wave. SRFs were calculated using an iterative time-domain code61 to deconvolve the L component by the S signal on the Q component60, and a Gaussian filter width alpha=1.5 (effective frequencies ~0.01–0.5 Hz). We used two additional stages of data selection based on cross-correlation coefficients (XCC) between each station-averaged SRF and its individual SRFs for 5–30 s after direct S. We retained only SRFs with XCC ≥ 0.3, then re-stacked the remaining SRFs, recalculated XCC, and retained only SRFs with XCC ≥ 0.7. Of the initial 11,096 SRFs, we retained 4051 high-quality SRFs from 244 events and 462 stations. We stacked moveout-corrected SRFs62 with 1/N0.8 normalization into 1°- and 0.5°-radius circular bins (with bin-center separations of 0.5°) based on the location of piercing points at 150 km depth calculated from the IASP91 Earth model (Fig. 1). We converted from time to depth down to 250 km using IASP91 (Figs. 2, 3, S3, S4). Relative depth uncertainty between different areas or depths of our model space, based on the <~±5% wavespeed variability within SE Tibet29, is likely also <~±5%. Positive and negative arrivals in SRFs correspond to velocity increases and decreases with depth, respectively. These arrivals are used to identify first-order velocity discontinuities in Earth’s structure. The LAB and mid-lithospheric discontinuities (MLDs) are typically associated with negative arrivals, while positive arrivals usually link to interfaces such as Moho or intra-crustal layers.
Identification of Moho on SRFs
Almost all our summed SRF traces show a clear positive (red) converter at about 70 km depth (Figs. 2, S3, S4) as expected from numerous PRF studies that identify the Moho at this depth13,14,15,17,36. PRFs, being higher frequency than SRFs, have better depth resolution and resolve a doublet converter interpreted as underthrust Indian crust at the base of the Tibetan crust13,14,15,17,36. This doublet has been mapped from south of the YZS to its northern limit, conventionally interpreted as the Indian crustal front north of the YZS13,14,15,17 (Fig. 4a).
Identification of LAB on SRFs
Most SRF studies of the LAB rely on informed but ultimately subjective opinion to decide which negative pulse on the SRF corresponds to the LAB (Figs. S1, S5). In contrast, here we auto-picked the largest-amplitude negative pulse on each SRF in a fixed depth range of 80–220 km, being the shallowest and deepest LAB previously reported in this area from SRF studies15,19,20,21,22,23,24,25,36 (Fig. S1). A surface-wave tomographic model6 similarly shows the LAB varying from 120 to 230 km across our study region, supporting our choice to limit the range of depths in which we auto-pick the maximum negative amplitude.
The picked negative S-to-P conversions represent depths of rapidly decreasing wavespeed (NVG) beneath the Moho. The data traces are complex, likely because of violations of our implicit assumption of flat boundaries beneath each 0.5°- or 1.0°-radius bin, and we commonly see multiple negative troughs with similar amplitude on individual traces. Although our automatic method requires a pick of LAB on every trace (Figs. 2, S3, S4) in our interpretations we do not ascribe geological significance to isolated auto-picks (e.g., at 32°N the highest-amplitude pick on the easternmost trace is 100-km deeper than all the other auto-picks along this record section (Fig. 2b); but the second strongest negative excursion on this easternmost trace is at the same shallow depth as all the other traces (Fig. S3e), supporting our interpretation of a continuous shallow LAB along 32°N). We only interpret areas spanning 200–800 km across which we observe relatively uniform LAB picks (Figs. 3, 4).
A theoretical possibility exists that negative converters immediately below the positive Moho converter represent side-lobes resulting from deconvolution or frequency-filtering21,37,63. Because of the deep Moho (locally ≥80 km) and long-wavelength of S-wave data, it is inevitable that the maximum negative amplitude is often the negative peak directly following the Moho positive peak. However, tests of SRF methods without deconvolution or filtering63, analysis of large regional datasets37, and detailed waveform modeling of SRFs in southern Tibet21 all strongly support the high-amplitude negative converters on stacked SRF data representing real geological boundaries. In Fig. S9, we show how 1D lithospheric models corresponding to our geologic interpretations can satisfactorily match the data. Scrutiny of the shallow (T-LAB) converter shows lateral variability in waveform character, in delay time after the Moho, and in amplitude relative to the Moho (Fig. 2), making it nearly impossible that T-LAB is only a side-lobe of the Moho pulse. The shallow NVG, where well-imaged as a continuous boundary across multiple traces, should therefore map T-LAB following the consensus of all previous workers in southern Tibet15,19,20,21,22,23,24,25,36 and modern reviews of global data18.
The shallower NVGs (20–50 km below the Moho) are typically more uniform or smoothly varying in depth, so easier to trace (C–C′, Fig. 2i) than the deeper converters (D–D′, Fig. 2j) identified here as cratonic Indian LAB. This interpretation of the deeper, and typically lower-amplitude (Fig. S10) converter as being cratonic, and the shallower, higher-amplitude NVG representing a juvenile LAB, is consistent with global correlations of LAB signatures with tectonothermal age18,37,38.
Any interpretation of NVGs in cratonic areas requires distinction between LAB and MLDs that are often imaged by SRFs beneath cratons at depths substantially less than the LAB as inferred from other methods18,37. No MLD interpretations have been made in Tibet, and multiple NVGs have instead been ascribed to stacked lithosphere, Tibetan above Indian15,21,22,24. If the deeper converter here interpreted as I-LAB were to be interpreted as an MLD, it would require that the LAB would be even deeper, significantly more so than estimated from other methods that are largely consistent with our results (e.g., waveform tomography29 (Fig. 3g–i), or Rayleigh-wave dispersion and SRF methods64). It is therefore appropriate to label our deep southern converter as I-LAB while recognizing that the complex and potentially multiple shallower NVGs (e.g., Fig. S5) may include MLDs within the Indian lithosphere.
Although we only mapped NVG depths with a single 1D wavespeed model (IASP91), we show that changing the piercing-point depth at which we bin and stack SRFs by a factor of two (from 100 to 200 km) makes little difference to our record sections (Fig. S11) and does not change our conclusions. Because depth trades off with wavespeed, Fig. S11 implies that our result is robust to significant changes in seismic wavespeed.
In summary, observations of NVG travel-time/depth and continuity contrasts (Fig. 2) and amplitude contrasts (Fig. S10), and regional geophysical observations29 and global compilations18,37,38, are all supportive of our interpretation of a deeper cratonic I-LAB and a shallower youthful T-LAB.
Analysis of Image Resolution
Our image resolution is limited by four effects:
[1] Spatial resolution is limited by the 0.5°-radius bins in which we average data, leading to ~50-km uncertainty in placing the lateral boundary between I-LAB and T-LAB.
[2] Our SRF images are obtained with the simplest-possible data processing to minimize bias, and assume horizontal converters. Hence, the termination on our SRF images of a gently dipping converted phase (northern limit of the deep I-LAB converter) could imply the truncation of the converter or could simply indicate the same geologic converter continues but with a steeper dip that defied our imaging.
[3] Our auto-picking strategy can only identify one NVG on any one trace, even though it is possible and even geologically probable that the shallow and deep boundaries overlap spatially. Hence, we derive a likely over-simplified picture of a vertical step in the LAB at the junction of I-LAB and T-LAB. Interpretive extrapolation of the objective (highest-amplitude) picks allows the two LABs to overlap vertically with T-LAB extending south or west a short distance above the northern or eastern limit of I-LAB. For example, on Fig. 2e, note a possible prolongation of the shallow NVG further west and of the deeper NVG further east.
[4] Our depth resolution is based on the frequencies present in our SRFs. Although the Gaussian filter passes frequencies up to ~0.5 Hz data, our SRFs are dominated by energy <0.25 Hz (Fig. S9), corresponding to a quarter-wavelength of ~5 km.
Although 50-km lateral uncertainty and 5-km depth uncertainty are considerable, they are far better resolution than most mantle tomography. Fig. S7 shows resolution tests for the S-wavespeed model (Liu et al. 29) to which we compare our SRF picks in Fig. 3. Although our LAB picks cut across some iso-velocity contours (e.g., T-LAB on Fig. S7d, cross-section Y), in other places the agreement between our SRF LAB and Liu et al. 29 wavespeeds is excellent (e.g., I-LAB on Fig. S7d, cross-sections X,Y,31 N). Allowing for the large potential smear of the tomography model (Fig. S7c), our SRF picks are reasonably consistent with prior seismic results.
Is the LAB torn, or only warped?
Our claim that the Indian lithosphere is torn relies on the underlying assumption that the mapped NVGs represent the LAB. In this, we are following all previous studies19,20,21,22,23,24,25,26 (see the “Identification of LAB on SRFs” section).
In some parts of our study area, limited data means that the 50-km vertical step-up from I-LAB to T-LAB cannot be localized to better than ±100 km (e.g., along A–A′, Fig. 2g), permitting the slope to be <15°, which could in principle be a tight warp, not a tear. Elsewhere, the step-up between our auto-picked NVGs reaches 100 km vertically across 50 km laterally (a single-trace spacing) (e.g., along 31°N, Fig. 2c), requiring a slope >60°, surely representing a tear in a mechanical lithosphere that cannot bend over such a tight radius of curvature. Although our auto-picking procedure only chooses a single NVG (LAB) beneath each surface location, our preferred interpretation is that I-LAB vertically underlies T-LAB for 20–100 km along parts of the SRF boundary (e.g., 29°N, Figs. 2e and B–B′, Fig. 2h). Such an overlap, and the disappearance of I-LAB beneath T-LAB, requires a tear in the Indian lithosphere, which is our preferred interpretation.
Data availability
We have made available the following data65: (1) Locations and operating periods of all stations from which data were analyzed in this study; (2) All 4051 SRFs with piercing points shown in Fig. 1, calculated according to the “Materials and methods” section. These data are available at https://doi.org/10.25740/tw217zv1829. Raw waveforms can be requested from the China Earthquake Administration International Earthquake Science Data Center (https://esdc.ac.cn/). Access to raw waveforms may require formal approval from data providers due to the terms of agreements with data providers.
References
Kapp, P. & DeCelles, P. G. Mesozoic–Cenozoic geological evolution of the Himalayan-Tibetan orogen and working tectonic hypotheses. Am. J. Sci. 319, 159 (2019).
Dal Zilio, L., Hetényi, G., Hubbard, J. & Bollinger, L. Building the Himalaya from tectonic to earthquake scales. Nat. Rev. Earth Environ. 2, 251–268 (2021).
Capitanio, F. A., Morra, G., Goes, S., Weinberg, R. F. & Moresi, L. India-Asia convergence driven by the subduction of the Greater Indian continent. Nat. Geosci. 3, 136–139 (2010).
Jin, Y., McNutt, M. K. & Zhu, Y.-S. Mapping the descent of Indian and Eurasian plates beneath the Tibetan Plateau from gravity anomalies. J. Geophys. Res. Solid Earth 101, 11275–11290 (1996).
Barazangi, M. & Ni, J. Velocities and propagation characteristics of Pn and Sn beneath the Himalayan arc and Tibetan plateau: possible evidence for underthrusting of Indian continental lithosphere beneath Tibet. Geology 10, 179–185 (1982).
McKenzie, D. P., Jackson, J. & Priestley, K. F. Continental collisions and the origin of subcrustal continental earthquakes. Can. J. Earth Sci. 56, 1101–1118 (2019).
Li, C., van der Hilst, R. D., Meltzer, A. S. & Engdahl, E. R. Subduction of the Indian lithosphere beneath the Tibetan Plateau and Burma. Earth Planet. Sci. Lett. 274, 157–168 (2008).
Wang, S., Replumaz, A., Chevalier, M.-L. & Li, H. Decoupling between upper crustal deformation of southern Tibet and underthrusting of Indian lithosphere. Terra Nova 34, 62–71 (2022).
Nunn, C., Roecker, S. W., Priestley, K. F., Liang, X. & Gilligan, A. Joint inversion of surface waves and teleseismic body waves across the Tibetan collision zone: the fate of subducted Indian lithosphere. Geophys. J. Int. 198, 1526–1542 (2014).
Liang, X. et al. 3D imaging of subducting and fragmenting Indian continental lithosphere beneath southern and central Tibet using body-wave finite-frequency tomography. Earth Planet. Sci. Lett. https://doi.org/10.1016/j.epsl.2016.03.029 (2016).
Chen, M. et al. Lithospheric foundering and underthrusting imaged beneath Tibet. Nat. Commun. 8, 15659 (2017).
Ren, Y. & Shen, Y. Finite frequency tomography in southeastern Tibet: evidence for the causal relationship between mantle lithosphere delamination and the north–south trending rifts. J. Geophys. Res. Solid Earth 113, B10316 (2008).
Kind, R. et al. Seismic images of crust and upper mantle beneath Tibet: evidence for Eurasian plate subduction. Science 298, 1219–1221 (2002).
Nábělek, J. et al. Underplating in the Himalaya-Tibet Collision Zone Revealed by the Hi-CLIMB Experiment. Science 325, 1371–1374 (2009).
Shi, D. et al. Receiver function imaging of crustal suture, steep subduction, and mantle wedge in the eastern India–Tibet continental collision zone. Earth Planet. Sci. Lett. 414, 6–15 (2015).
Wang, C. Y. et al. Deep structure of the Eastern Himalayan collision zone: Evidence for underthrusting and delamination in the post-collisional stage. Tectonics 38, 3614–3628 (2019).
Shi, D., Klemperer, S. L., Shi, J., Wu, Z. & Zhao, W. Localized foundering of Indian lower crust in the India-Tibet collision zone. Proc. Natl. Acad. Sci. USA https://doi.org/10.1073/pnas.2000015117 (2020).
Rychert, C. A., Harmon, N., Constable, S. & Wang, S. The nature of the lithosphere-asthenosphere boundary. J. Geophys. Res. Solid Earth 125, e2018JB016463 (2020).
Kumar, P., Yuan, X., Kind, R. & Ni, J. Imaging the colliding Indian and Asian lithospheric plates beneath Tibet. J. Geophys. Res. Solid Earth https://doi.org/10.1029/2005jb003930 (2006).
Devi, E. U., Kumar, P. & Kumar, M. R. Imaging the Indian lithosphere beneath the Eastern Himalayan region. Geophys. J. Int. 187, 631–641 (2011).
Zhao, W. et al. Tibetan plate overriding the Asian plate in central and northern Tibet. Nat. Geosci. 4, 870–873 (2011).
Xu, Q., Zhao, J., Pei, S. & Liu, H. Imaging lithospheric structure of the eastern Himalayan syntaxis: New insights from receiver function analysis. J. Geophys. Res. Solid Earth 118, 2323–2332 (2013).
Hu, J., Yang, H., Li, G. & Peng, H. Seismic upper mantle discontinuities beneath Southeast Tibet and geodynamic implications. Gondwana Res 28, 1032–1047 (2015).
Liu, Z. et al. Complex structure of upper mantle beneath the Yadong-Gulu rift in Tibet revealed by S-to-P converted waves. Earth Planet. Sci. Lett. 531, 115954 (2020).
Xu, Q., Liu, H., Yuan, X., Zhao, J. & Pei, S. Eastward dipping style of the underthrusting Indian lithosphere beneath the Tethyan Himalaya illuminated by P and S receiver functions. J. Geophys. Res. Solid Earth 126, e2020JB021219 (2021).
Zhao, J. et al. The boundary between the Indian and Asian tectonic plates below Tibet. Proc. Natl. Acad. Sci. USA 107, 11229–11233 (2010).
Craig, T. J., Kelemen, P. B., Hacker, B. R. & Copley, A. Reconciling geophysical and petrological estimates of the thermal structure of Southern Tibet. Geochem. Geophys. Geosyst. 21, e2019GC008837 (2020).
Hou, Z. et al. Cenozoic eastward growth of the Tibetan Plateau controlled by tearing of the Indian slab. Nat. Geosci. 17, 255–263 (2024).
Liu, C. et al. A high-resolution seismic velocity model for East Asia using full-waveform tomography: Constraints on India-Asia collisional tectonics. Earth Planet. Sci. Lett. https://doi.org/10.1016/j.epsl.2024.118764 (2024).
Priestley, K., Jackson, J. & McKenzie, D. Lithospheric structure and deep earthquakes beneath India, the Himalaya and southern Tibet. Geophys. J. Int. 172, 345–362 (2008).
Song, X. & Klemperer, S. L. Numerous Tibetan lower-crustal and upper-mantle earthquakes, detected by Sn/Lg ratios, suggest crustal delamination or drip tectonics. Earth Planet. Sci. Lett. https://doi.org/10.1016/j.epsl.2023.118555 (2024).
Klemperer, S. L. et al. Limited underthrusting of India below Tibet: 3He/4He analysis of thermal springs locates the mantle suture in continental collision. Proc. Natl. Acad. Sci. USA https://doi.org/10.1073/pnas.2113877119 (2022).
Copley, A., Avouac, J.-P. & Wernicke, B. P. Evidence for mechanical coupling and strong Indian lower crust beneath southern Tibet. Nature 472, 79–81 (2011).
Shi, D. et al. West–east transition from underplating to steep subduction in the India–Tibet collision zone revealed by receiver-function profiles. Earth Planet. Sci. Lett. https://doi.org/10.1016/j.epsl.2016.07.051 (2016).
Zurek, B. The evolution and modification of continental lithosphere, dynamics of ‘indentor corners’ and imaging the lithosphere across the eastern syntaxis of Tibet. Ph.D. thesis, Lehigh University (2008).
Li, Z., Tian, Y., Zhao, D. & Feng, X. Role of crust-mantle detachment and slab delamination in the plateau uplift and crustal thickening process in Southern Tibet. J. Geophys. Res. Solid Earth 130, jb029815 (2025).
Liu, L., Klemperer, S. L. & Blanchette, A. R. Western Gondwana imaged by S receiver-functions (SRF): new results on Moho, MLD (mid-lithospheric discontinuity) and LAB (lithosphere-asthenosphere boundary). Gondwana Res https://doi.org/10.1016/j.gr.2021.04.009 (2021).
Mancinelli, N. J., Fischer, K. M. & Dalton, C. A. How sharp is the cratonic lithosphere-asthenosphere transition? Geophys. Res. Lett. 44, 10,189–110,197 (2017).
Yin, A. Mode of Cenozoic east-west extension in Tibet suggesting a common origin of rifts in Asia during the Indo-Asian collision. J. Geophys. Res. Solid Earth 105, 21745–21759 (2000).
Bian, S. et al. Late Pliocene onset of the Cona rift, eastern Himalaya, confirms eastward propagation of extension in Himalayan-Tibetan orogen. Earth Planet. Sci. Lett. 544, 116383 (2020).
Chen, W.-P. & Özalaybey, S. Correlation between seismic anisotropy and Bouguer gravity anomalies in Tibet and its implications for lithospheric structures. Geophys. J. Int. 135, 93–101 (1998).
Chen, W.-P. et al. Shear-wave birefringence and current configuration of converging lithosphere under Tibet. Earth Planet. Sci. Lett. 295, 297–304 (2010).
Hoke, L., Lamb, S., Hilton, D. R. & Poreda, R. J. Southern limit of mantle-derived geothermal helium emissions in Tibet: implications for lithospheric structure. Earth Planet. Sci. Lett. 180, 297–308 (2000).
Chen, W.-P. & Molnar, P. Focal depths of intracontinental and intraplate earthquakes and their implications for the thermal and mechanical properties of the lithosphere. J. Geophys. Res. Solid Earth 88, 4183–4214 (1983).
Rychert, C. A. & Harmon, N. Predictions and observations for the oceanic lithosphere from S-to-P receiver functions and SS precursors. Geophys. Res. Lett. 45, 5398–5406 (2018).
Dasgupta, R. Volatile-bearing partial melts beneath oceans and continents–Where, how much, and of what compositions? Am. J. Sci. 318, 141 (2018).
Klemperer, S. L. Crustal flow in Tibet: geophysical evidence for the physical state of Tibetan lithosphere, and inferred patterns of active flow. Geol. Soc. Lond. Spec. Publ. https://doi.org/10.1144/GSL.SP.2006.268.01.03 (2006).
Ma, J., Song, X., Bunge, H.-P., Fichtner, A. & Tian, Y. Wholesale flat subduction of the Indian slab and northward mantle convective flow: Plateau growth and driving force of the India–Asia collision. Proc. Natl. Acad. Sci. USA 122, e2411776122 (2025).
Cui, Q. & Li, Z.-H. Along-Strike variation of convergence rate and pre-existing weakness contribute to Indian slab tearing beneath Tibetan Plateau. Geophys. Res. Lett. 49, e2022GL098019 (2022).
Wang, R., Weinberg, R. F., Zhu, D.-C., Hou, Z.-Q. & Yang, Z.-M. The impact of a tear in the subducted Indian plate on the Miocene geology of the Himalayan-Tibetan orogen. GSA Bull 134, 681–690 (2021).
Tian, X., Yun, C., Tseng, T. L., Klemperer, S. L. & Teng, J. Weakly coupled lithospheric extension in southern Tibet. Earth Planet. Sci. Lett. https://doi.org/10.1016/j.epsl.2015.08.025 (2015).
Govers, R. & Wortel, M. J. R. Lithosphere tearing at STEP faults: response to edges of subduction zones. Earth Planet. Sci. Lett. 236, 505–523 (2005).
Rosenbaum, G. & Piana Agostinetti, N. Crustal and upper mantle responses to lithospheric segmentation in the northern Apennines. Tectonics 34, 648–661 (2015).
Boonma, K., García-Castellanos, D., Jiménez-Munt, I. & Gerya, T. Thermomechanical modelling of lithospheric slab tearing and its topographic response. Front. Earth Sci. https://doi.org/10.3389/feart.2023.1095229 (2023).
Wei, J. et al. Tectonic segmentation by N-S-trending cona cross structure in the Eastern Himalaya: Evidence from thermochronology and thermokinematic modeling. Tectonophysics 839, 229527 (2022).
Bilham, R. Himalayan earthquakes: a review of historical seismicity and early 21st century slip potential. Geol. Soc. Lond. Spec. Publ. 483, 423–482 (2019).
Zheng, T. et al. Direct structural evidence of Indian continental subduction beneath Myanmar. Nat. Commun. 11, 1944 (2020).
Faber, S. & Müller, G. Sp phases from the transition zone between the upper and lower mantle. Bull. Seismol. Soc. Am. 70, 487–508 (1980).
Liu, L. & Gao, S. S. Lithospheric layering beneath the contiguous United States constrained by S-to-P receiver functions. Earth Planet. Sci. Lett. 495, 79–86 (2018).
Kind, R., Yuan, X. & Kumar, P. Seismic receiver functions and the lithosphere–asthenosphere boundary. Tectonophysics 536-537, 25–43 (2012).
Ammon, C. J. The isolation of receiver effects from teleseismic P waveforms. Bull. Seismol. Soc. Am. 81, 2504–2510 (1991).
Dueker, K. G. & Sheehan, A. F. Mantle discontinuity structure from midpoint stacks of converted P to S waves across the Yellowstone hotspot track. J. Geophys. Res. Solid Earth 102, 8313–8327 (1997).
Kind, R., Mooney, W. D. & Yuan, X. New insights into structural elements of the upper mantle beneath the contiguous United States from S-to-P converted seismic waves. Geophys. J. Int. 222, 646–659 (2020).
Singh, A., Singh, C. & Kennett, B. L. N. A review of crust and upper mantle structure beneath the Indian subcontinent. Tectonophysics 644-645, 1–21 (2015).
Shi, D., Liu, L. & Klemperer, S. Indian lithospheric plate is tearing apart beneath Tibet Version 1. Stanford Digital Repository https://doi.org/10.25740/tw217zv1829 (2025).
Acknowledgements
We thank Dr. Sanzhong Li for his suggestions. We thank three reviewers for their thought-provoking commentary and the editorial staff for their handling of this paper. This study was supported by National Natural Science Foundation of China grant 42304058 (LL), Natural Science Foundation of Shandong Province grant ZR202211100002 (LL), Shandong Provincial Natural Science Fund for Excellent Young Scientists Fund Program (Overseas) grant 2023HWYQ-057 (LL), the Fundamental Research Funds for the Central Universities 202341008 (LL), National Natural Science Foundation of China grant 42174109 (DS), and United States National Science Foundation grant 1627930 (SLK).
Author information
Authors and Affiliations
Contributions
Fieldwork: D.S. Methodology: L.L., D.S. Visualization: L.L., S.L.K. Data analysis: L.L. Writing—original draft: L.L., S.L.K. Writing—review & editing: S.L.K., L.L., D.S.
Corresponding authors
Ethics declarations
Competing interests
The authors declare no competing interests.
Peer review
Peer review information
Communications Earth and Environment thanks Simone Pilia, Anne Meltzer, and Devajit Hazarika for their contribution to the peer review of this work. Primary Handling Editors: Joao Duarte and Carolina Ortiz Guerrero, Martina Grecequet. A peer review file is available.
Additional information
Publisher’s note Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Supplementary information
Rights and permissions
Open Access This article is licensed under a Creative Commons Attribution-NonCommercial-NoDerivatives 4.0 International License, which permits any non-commercial use, sharing, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons licence, and indicate if you modified the licensed material. You do not have permission under this licence to share adapted material derived from this article or parts of it. The images or other third party material in this article are included in the article’s Creative Commons licence, unless indicated otherwise in a credit line to the material. If material is not included in the article’s Creative Commons licence and your intended use is not permitted by statutory regulation or exceeds the permitted use, you will need to obtain permission directly from the copyright holder. To view a copy of this licence, visit http://creativecommons.org/licenses/by-nc-nd/4.0/.
About this article

Cite this article
Liu, L., Shi, D. & Klemperer, S.L. The Indian Plate subducting below the Tibet Plateau is tearing apart. Commun Earth Environ 6, 616 (2025). https://doi.org/10.1038/s43247-025-02601-w
Received:
Accepted:
Published:
Version of record:
DOI: https://doi.org/10.1038/s43247-025-02601-w
